Some strongly nonlinear oscillators have been investigated with the help of combined modified Lindstedt–Poincare and homotopy perturbation methods. The solutions are more accurate than those obtained by the modified Lindstedt–Poincare method. Moreover, the determination of solutions is simpler than usual homotopy perturbation methods. Some similarities and dissimilarities between the present method and other existing methods have also been discussed.
Mathematical modeling of the physical systems is very important and leads to differential equations many of them are strongly nonlinear such as micro-electromechanical system oscillators, vibration of the trammel pendulum, vibration of a pendulum attached to a rolling wheel, vibration of two-mass spring system etc. Solution of nonlinear differential equations plays an important role in engineering to investigate the physical systems. The methods to solve strongly nonlinear oscillators become inadequate for their analytical treatments. Many researchers have determined the approximate solutions of nonlinear problems by using various methods. Among them the Lindstedt–Poincare (LP) method1,2 was originally developed to solve
where is a constant known as the unperturbed frequency.
Several authors3–10 extended the method to solve strongly nonlinear problems. Among them Jones3 presented an approximate technique by introducing a new parameter, . Such approximate solution is valid for both small and large values of . Burton4 and Burton et al.5 presented a modified version of the LP method. Cheung et al.6 further modified the method. However, all approximate solutions obtained by different modified approaches3–6 are effective for Duffing oscillators with cubical nonlinearity. He8–10 presented another modification of the LP method. He11 also presented the homotopy perturbation method for solving equation (1) for large amplitudes of oscillation. In a recent article,7 Alam et al. provided a generalized form of the modified LP6 method and used it to solve various nonlinear oscillators. On the other hand, the homotopy perturbation method has been modified in some recent articles presented by Anjum et al.,12 He et al.,13 Anjum et al.,14 Ji et al.,15 and He et al.16 Moreover, some approximate techniques are available to solve strongly nonlinear oscillators (Qie et al.,17 Koochi A and Goharimanesh,18 Anjum et al.,19,20 Rehman et al.,21 Suleman et al.,22 Anjum et al.,23 Li and Nadeem,24 and Askari et al.25).
The goal of this article is to present a combined technique of the LP and homotopy perturbation methods to solve some strongly nonlinear oscillators. The determination of solutions depends on both parameters and (well-known as a homotopy parameter11). For some nonlinear problems the combined method helps to obtain significantly improved results. An earlier homotopy perturbation method was used as an alternative to the LP method to solve some truly nonlinear oscillators26 where . A coupling technique of these methods was presented in article27. But the present technique is completely different from article27. Besides these, the present method is more systematic and easier.
By a variable transformation , equation (1) becomes
where is the frequency of this oscillator and primes denote differentiation with respect to . Earlier Jones,3 Burton4 and Burton, and Hamdan5 used the following series for
where are constants. In article6, equation (3) was replaced by
and then, it was transformed to
where are unknown constants to be determined. Replacing equation (3) was expanded in a series of as
By substituting equation (5) into equation (2), equation (2) then becomes
Substituting equation (6) into equation (7) and equating coefficients like powers of a set of linear differential equations were obtained
The initial conditions were replaced by , , , and , and , and etc. were determined sequentially.
Combination of the modified LP and homotopy perturbation methods
According to the homotopy perturbation technique, equation (7) can be written as
where is homotopy parameter, ( is a dimensionless quantity introduced in article6) and
If , equation (10) returns to equation (7). It is noted that the rest of the coefficients are not always equal to for every order of approximations. Therefore, becomes slightly different from the result obtained by the modified LP method.6 The solution is also slightly different. A homotopy perturbation solution is considered as
By substitution of equation (11) and equation (12) into equation (10) and equating coefficients of like powers of , a set of linear differential equations is obtained. To prevent secular terms, it is assumed that exclude first harmonic terms. Under this assumption all unknown coefficients of two series of and are determined.
Examples (applications)
Some examples are presented in this section to illustrate the accuracy of the proposed method. Numerical results are provided and discussed for some special cases.
Example-1: Duffing oscillator with cubic nonlinearity
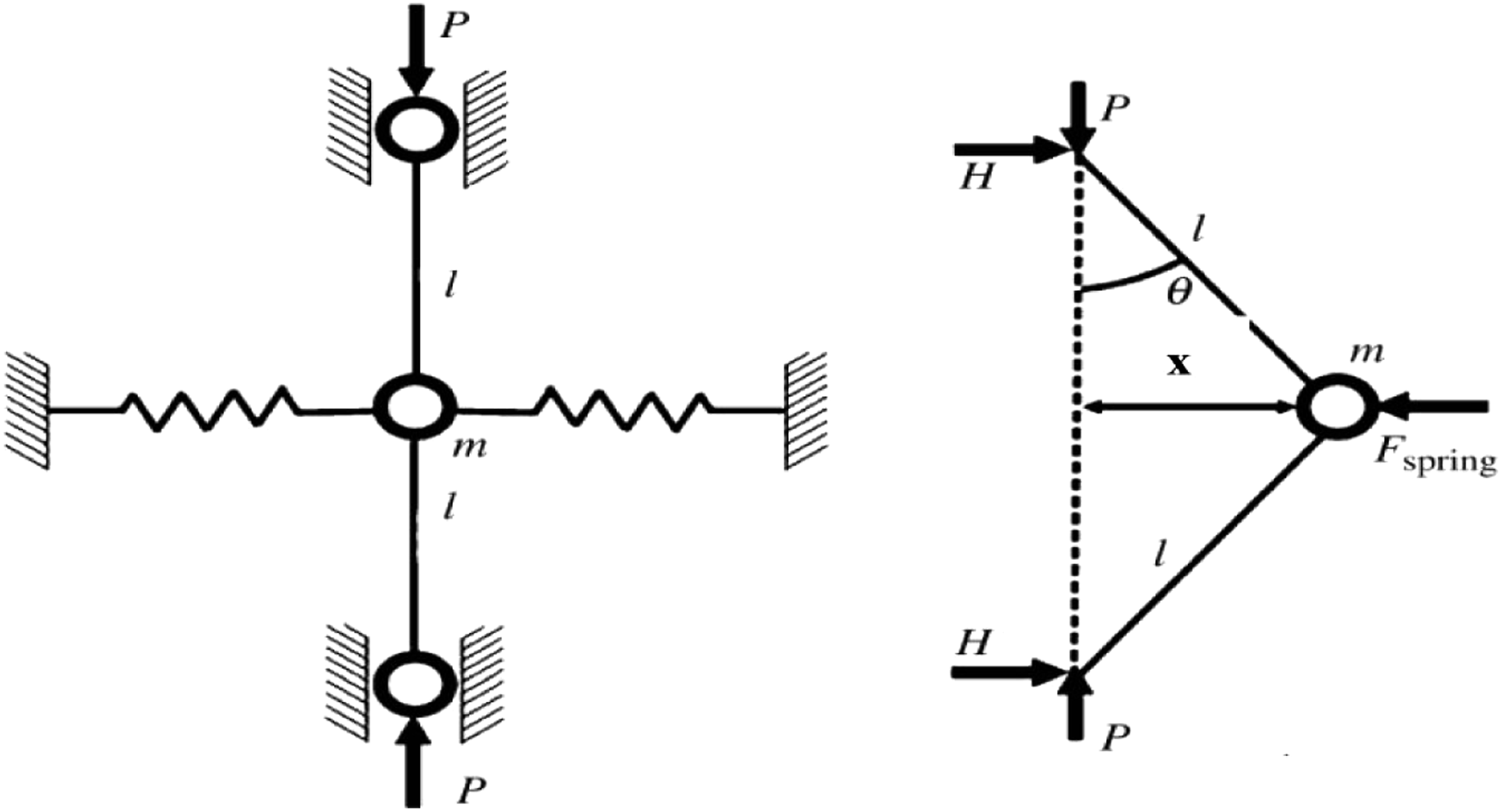
The structure for the buckling of a column motion of a particle on a rotating parabola shown in Figure 1 has been considered (Presented in Marinca et al.28). The mass moves in the horizontal direction only. Neglecting the weight of all but the mass, the equation for the motion of is
where the spring force is given by
Model for the buckling of the column motion of a particle on a rotating parabola.
According to the processes discussed in the previous section, the linear differential equations for have been obtained
Solving the above set of equations with the initial conditions described in the previous section, we obtained the following results
and
Substituting together with the values of , equation (22) becomes
By the modified LP method,6 the following results was obtained
In both relations of , the results are the same until and it is the correct result. If the next terms and are added respectively in the series equation (23) and Eq. (24), the results will be the same until and later series (presented by equation (24)) do not contain more than ordered terms. On the contrary, the former contains more two terms up to . Again, all the coefficients are negative. It is observed that all approximate results of are smaller than its exact value and the former (obtained by a combined technique) provides better results for this oscillator.
Example-2: nonlinear oscillator with inertia-type cubic nonlinearity
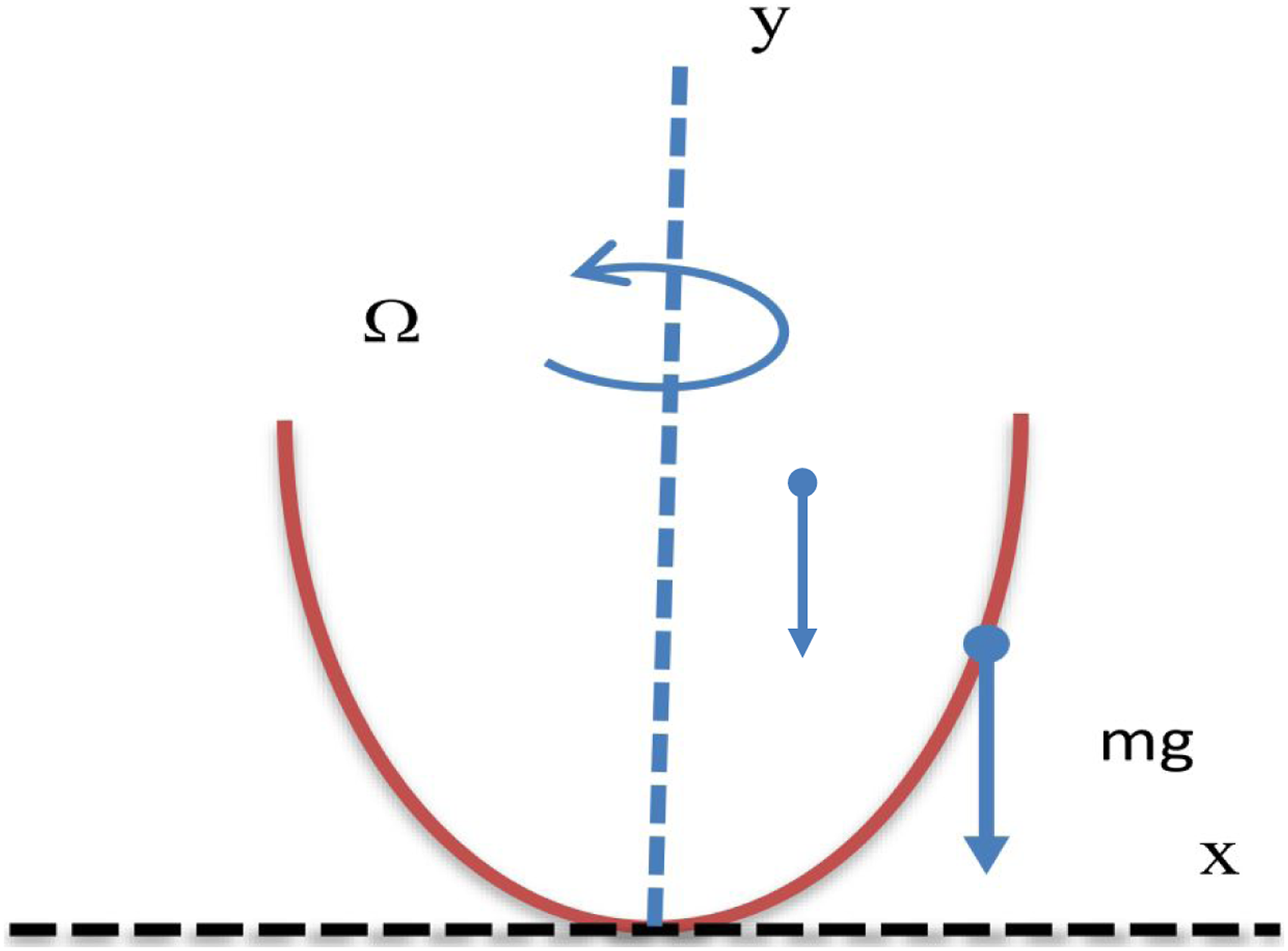
The motion of a ring of mass sliding freely on a wire described by the parabola which rotates with a constant angular velocity about the y-axis as shown in Figure 2 (Nayfeh and Mook2). The equation describing the motion of the ring is (Nayfeh and Mook,2 Marinca and Herinasu28).
For equation (31), the following results have been obtained
and then,
On the other hand, the calculated result by the modified LP method7 is
All these results are similar to those obtained for the cubic Duffing oscillator (i.e., the coefficients of vanish). For both, oscillators and coefficients are much smaller than .
Example-3: duffing oscillator with quintic nonlinearity
Let us consider a highly nonlinear oscillator, that is, Duffing oscillator with quintic nonlinearity
For this oscillator the following results have been obtained
and
On the other hand, the calculated result by the modified LP method7 is
The coefficients of equation (36) are also much smaller than , but larger than those of equation (23) and equation (24). Moreover, all are positive. For this reason, the results oscillate and gradually approach its exact value. However, the errors of results obtained by equation (35) are much smaller than those obtained by equation (36).
Example-4: duffing oscillator with septic nonlinearity
Let us consider another highly nonlinear oscillator, that is, Duffing oscillator with septic nonlinearity
For this oscillator the following results have been obtained
and
On the other hand, the calculated result by the modified LP method7 is
The coefficients of equation (39) are also much smaller than but larger than those of equation (23) and equation (24). Moreover, all are positive. For this reason, the results oscillate and gradually approach its exact value. However, the errors of results obtained by equation (38) are much smaller than those obtained by equation (39).
Convergency of the -series
For a lot of nonlinear oscillators, the -series of the modified LP method7 converge rapidly when (i.e., in the case of small oscillations). In the case of large amplitude of oscillations (i.e.,) the series also converges since the coefficients of the series, gradually decrease. For some of the oscillators, the coefficients vanish. According to the recently presented homotopy perturbation method,16 the coefficients vanish for oscillator presented by equation (16). In these situations, the frequency of oscillation is same for second and third approximations; and then for fourth and fifth approximations. On the other hand, the coefficients are different in sign of the coefficients for oscillators presented by equation (34) and equation (37). In these situations, approximate results of frequencies oscillate. For these nonlinear oscillators, the calculated frequencies obtained by the homotopy perturbation method16 also oscillates. Moreover, homotopy perturbation method16 fails to measure frequency as well as solution of oscillator presented by equation (26) especially in the case of amplitude of oscillation. All these problems have been satisfactorily removed in this article.
Results and discussion
Recently the modified Lindstedt–Poincare method6 has been generalized for solving strongly nonlinear oscillators.7 The generalized method covers wide varieties of nonlinear problems where . (It is noted that the modified technique6 is useless for a class of nonlinear oscillators, that is, second example equation (26)). Moreover, the generalized version7 has been combined with the homotopy perturbation technique for some truly nonlinear oscillators where . In this article the method has been combined with homotopy perturbation for all values of whether it vanishes or not. Earlier truly nonlinear oscillators were solved by the homotopy method,11 but with a different approach. The new technique is more systematic than all the past methods mentioned above. For large amplitudes of oscillations and errors of frequency become the largest. To compare the results with existing results, the ratios of frequency with their exact frequency are presented below.
For the cubic Duffing oscillator equation (16), the ratios respectively become:
and by the modified LP method,7 with equation (36)
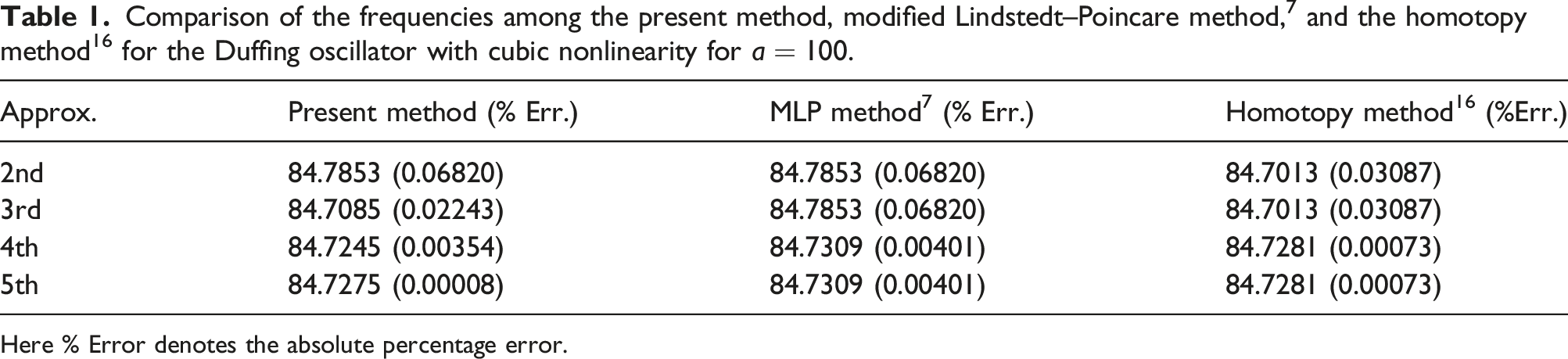
For the Duffing oscillator with cubic nonlinearity, the second, third, fourth, and fifth approximated frequencies with their percentage error are given in Table 1.
Comparison of the frequencies among the present method, modified Lindstedt–Poincare method,7 and the homotopy method16 for the Duffing oscillator with cubic nonlinearity for .
Here % Error denotes the absolute percentage error.
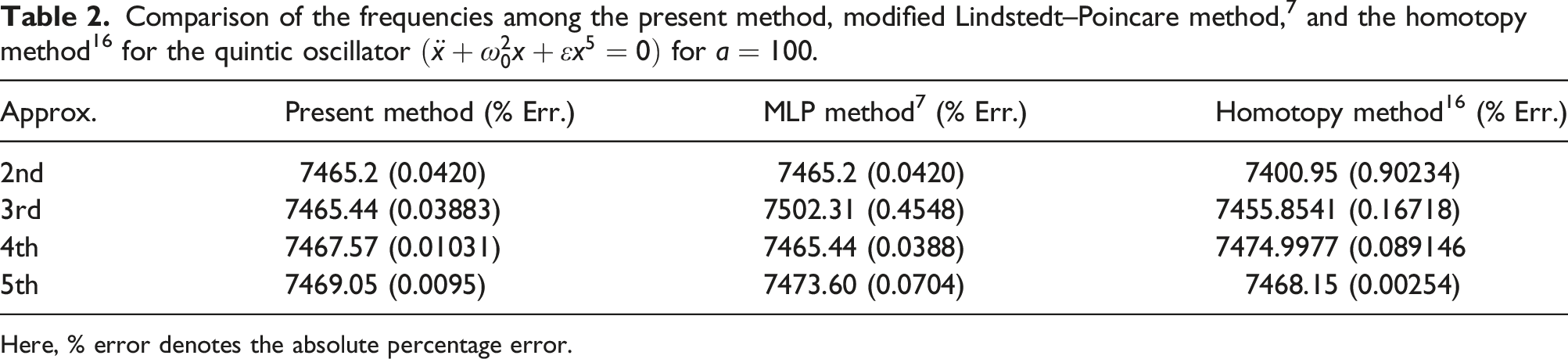
Moreover, for the highly nonlinear oscillators equation (34), the second, third, fourth, and fifth approximated frequencies with their percentage error are given in Table 2.
Comparison of the frequencies among the present method, modified Lindstedt–Poincare method,7 and the homotopy method16 for the quintic oscillator for .
Here, % error denotes the absolute percentage error.
The present solution along with numerical, Modified Lindstedt–Poincare6 and generalized Lindstedt–Poincare7 solutions are presented in Figures 3–7. Also, the frequency analysis of the present method with existing methods is provided in Figures 8 and 9.
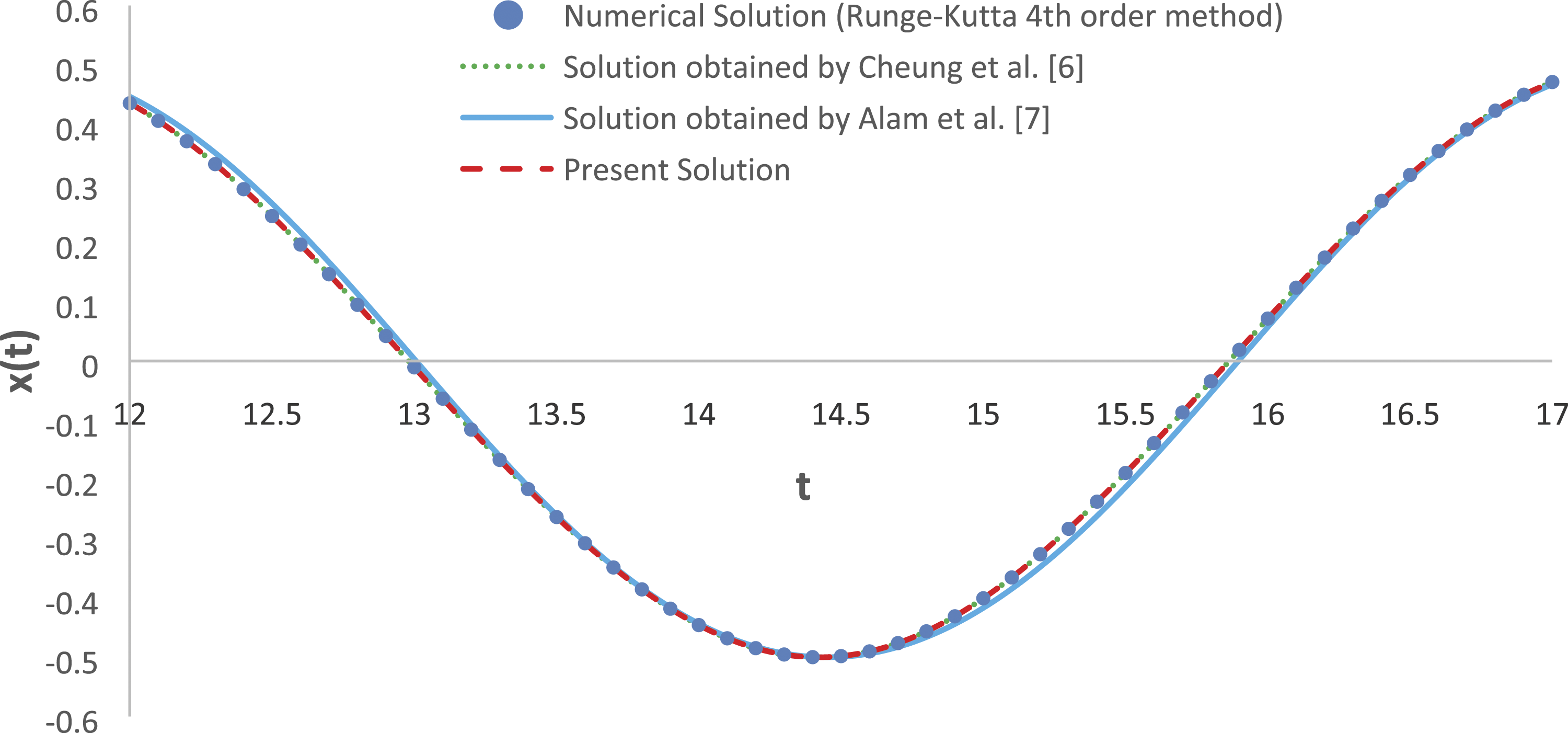
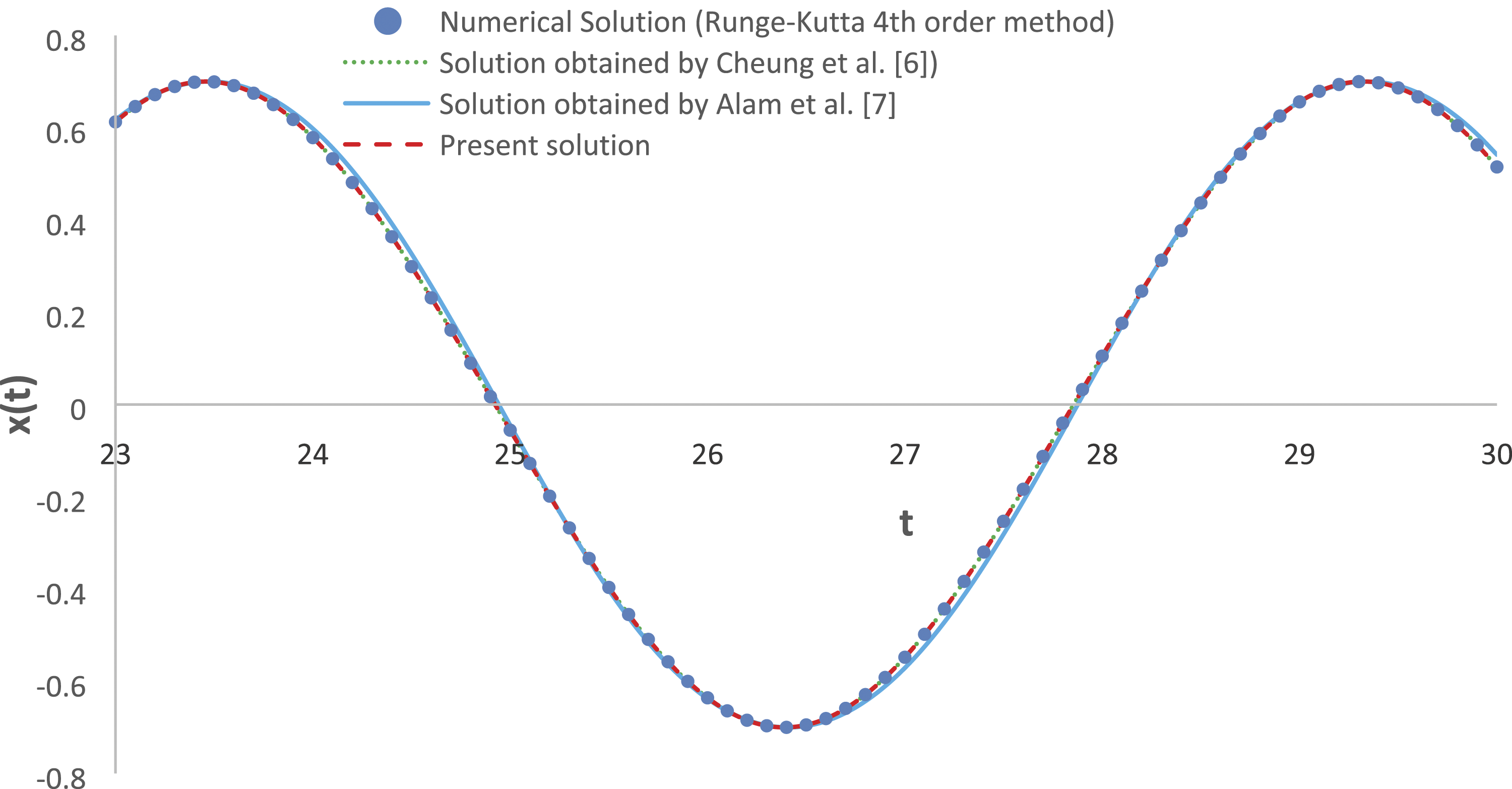
Comparison between the time versus displacement results obtained by the present method, numerical method, Cheung et al.6 method, and Alam et al.7 method for the Duffing oscillator with cubic nonlinearity when .
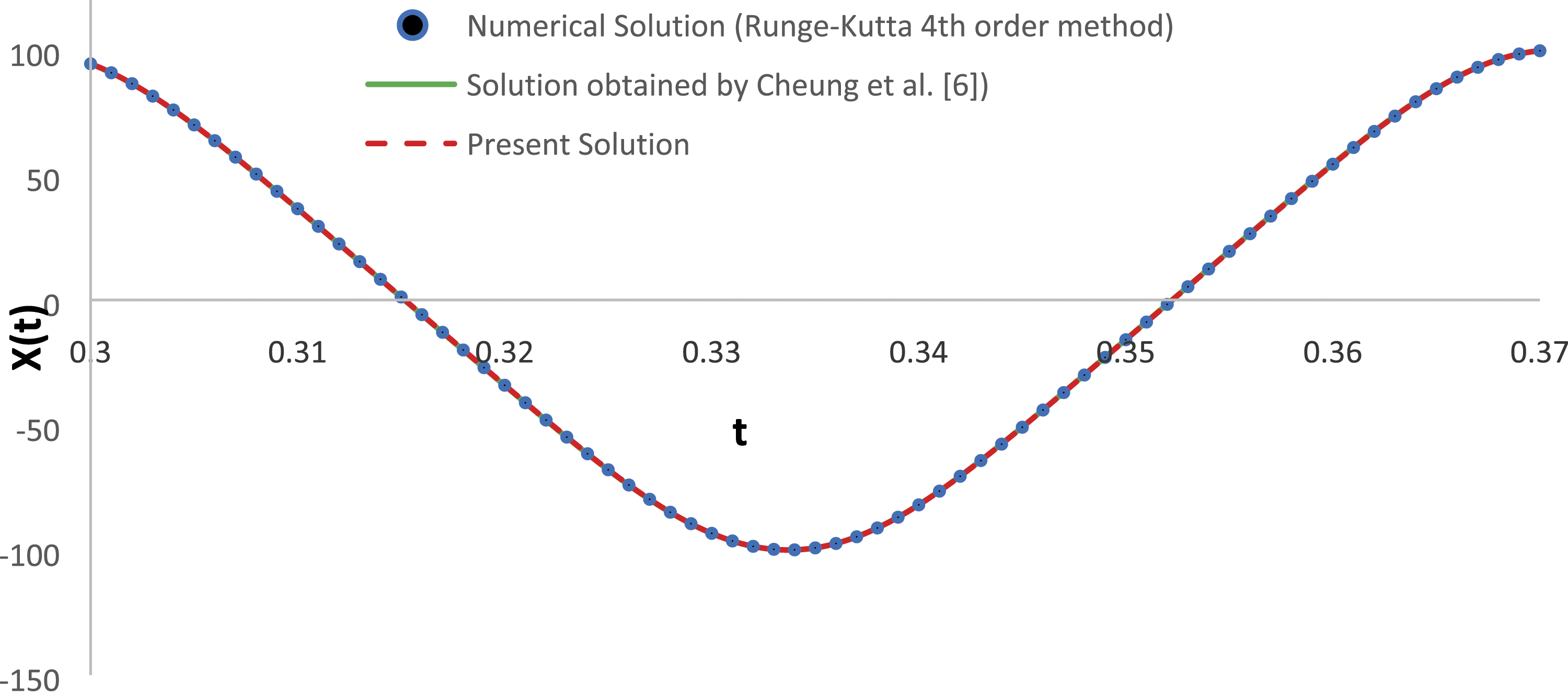
Comparison between the time versus displacement results obtained by the present method, numerical method, and Cheung et al.6 method for the Duffing oscillator with cubic nonlinearity when .
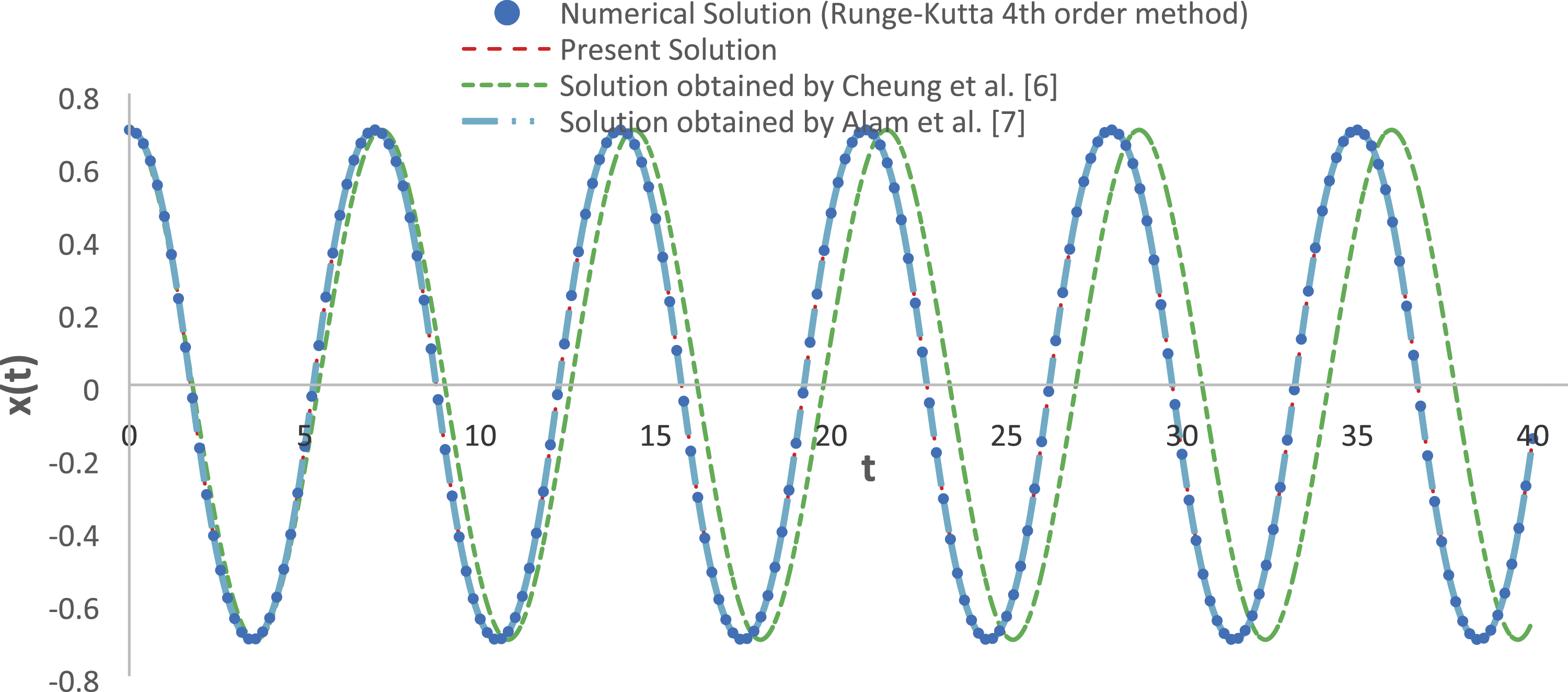
Comparison between the time versus displacement results obtained by the present method, numerical method, Cheung et al.6 method, and Alam et al.7 method for equation (26) when .
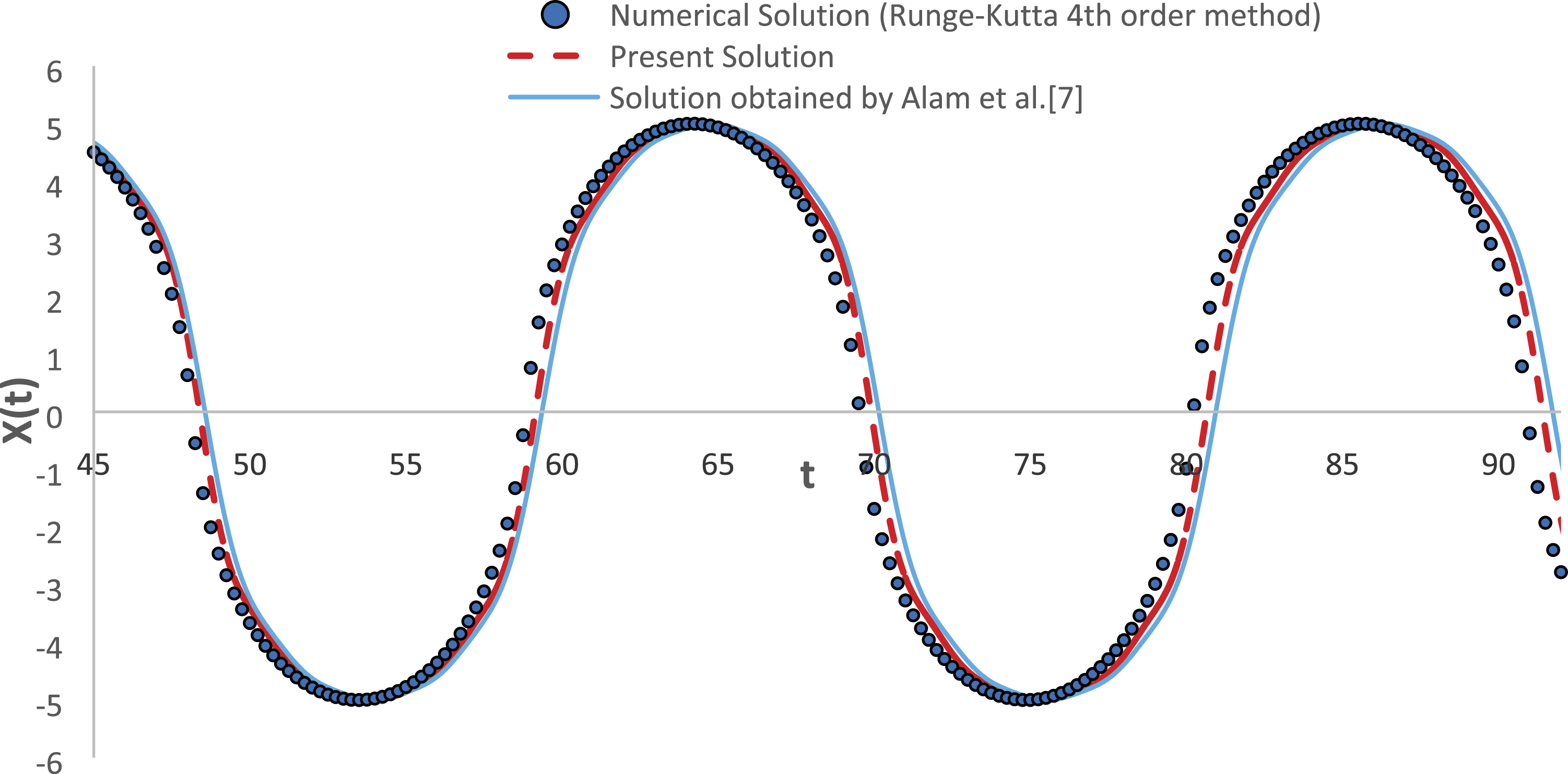
Comparison between the time versus displacement results obtained by the present method, numerical method, and Alam et al.7 method for equation (26) when .
Comparison between the time versus displacement results obtained by the present method, numerical method, Cheung et al.6 method, and Alam et al.7 method for the quintic oscillator when .
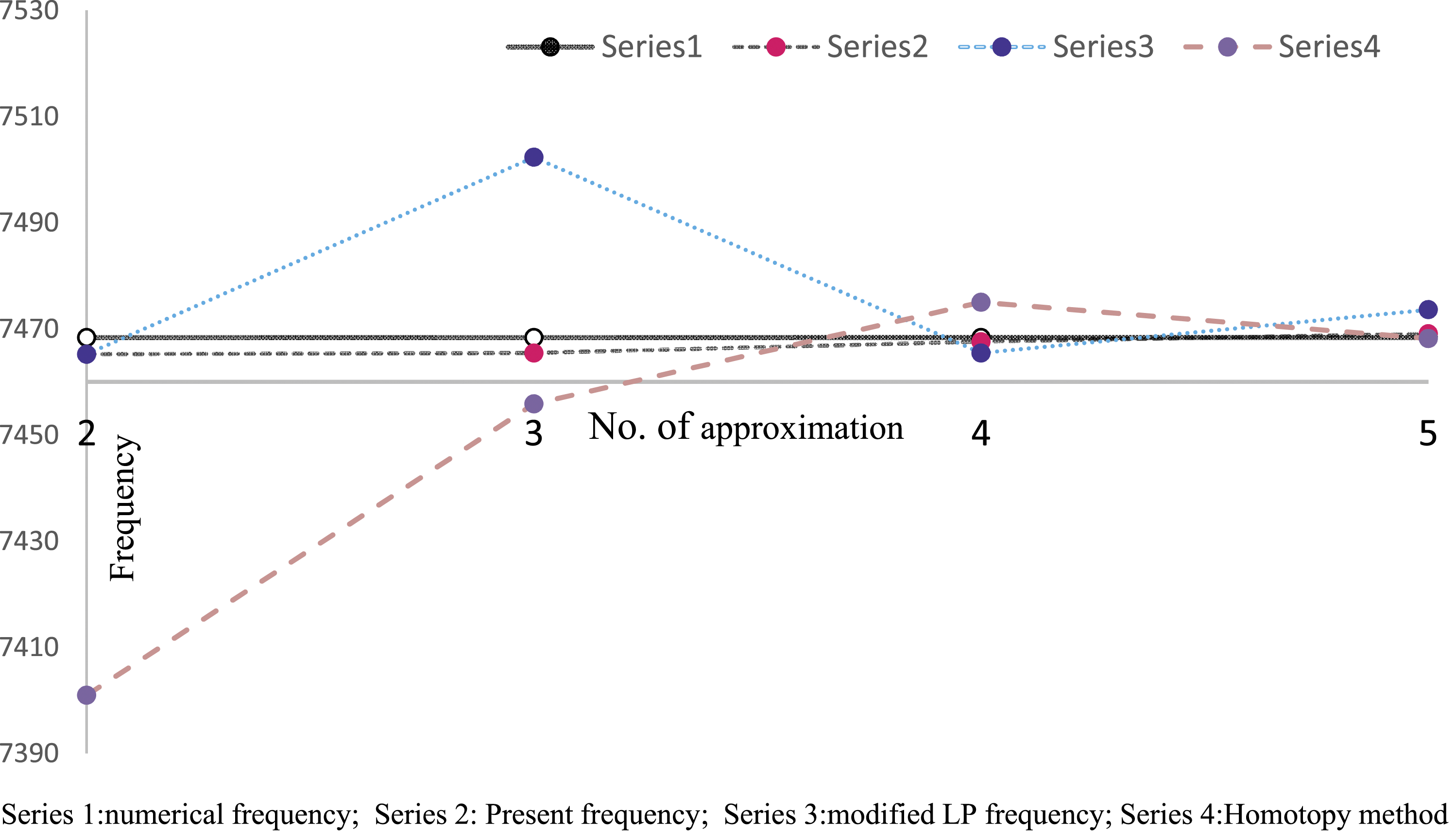
Comparison of calculated frequencies measured by the present technique and earlier modified technique (Alam et al.7), homotopy method16 together with the numerical results for the quintic oscillator when .
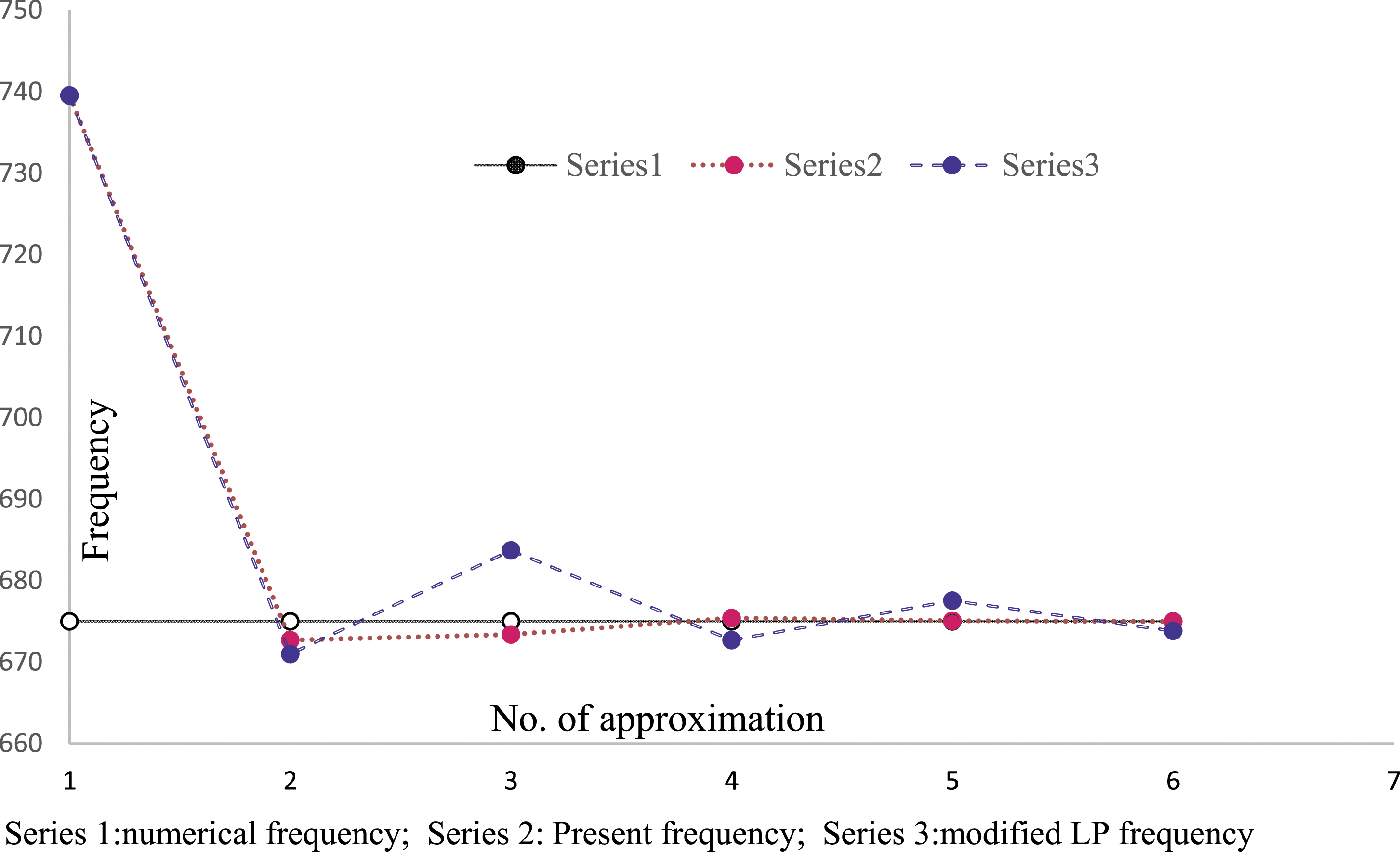
Comparison of calculated frequencies measured by the present technique and earlier modified technique (Alam et al.7) together with the numerical results for the septic oscillator when .
All these figures show that the present results have good agreement with the numerical results; on the other hand, in some cases, the present results are better (Figure 3, Figures 5–9) than other existing results. Also, for a large amplitude, the present results are converging but other results are diverging, that is, the results obtained by Cheung et al.6 diverge for equation (26) and the results obtained by Alam et al.7 diverge for Duffing cubic, quintic, and septic oscillators.
Conclusion
Earlier modified LP method and homotopy perturbation method were presented for solving strongly nonlinear oscillators especially in case of large amplitude of oscillation. Based on these methods, a combined technique has been presented which provides more satisfactory results. The necessity of present technique has been illustrated by considering four different nonlinear oscillators. Calculated frequencies by the modified LP method of cubical Duffing oscillator (i.e., equation (24)) gradually closes to numerical result with increasing order of approximation. But present frequency (equation (23)) closes faster than that of the modified LP method and a recent homotopy perturbation method.16 For the quintic oscillator, coefficients are different in sign of . It is noted that for cubical oscillator. So, major problem arises in case of quintic oscillator. In this situation error of the frequency (equation (36), which is obtained by modified LP method) oscillates. Similar problem arises in septic oscillator. Homotopy perturbation method16 measures also oscillating results for these oscillators. But present method provides more accurate result. Moreover, the present method covers various nonlinear oscillators involving , and (e.g., equation (26)). It is noted that the homotopy perturbation method16 is useless for solving equation (26). Homotopy perturbation method16 has another limitation. According to this method, n-th ( approximate frequency are calculated from n-th order algebraic equation. On the contrary, modified LP method and present method are straightforward. However, the present method has a limitation for solving the quadratic oscillators. It measures similar results of modified LP method.6
Footnotes
Acknowledgements
The authors are grateful to the honorable reviewers for their helpful comments and suggestions in improving the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Md Helal Uddin Molla
References
1.
NayfehAH. Perturbation methods. New York, NY: Wiley & Sons, 1973.
2.
NayfehAHMookDT. Nonlinear oscillations. New York, NY: Wiley & Sons, 1979.
3.
JonesSE. Remarks on the perturbation process for certain conservative systems. Int J Non-linear Mech1978; 13: 125–128.
4.
BurtonTD. A perturbation method for certain nonlinear oscillators. Int J Non-linear Mech1984; 19: 397–407.
5.
BurtonTDHamdanMH. Analysis of nonlinear autonomous conservative oscillators by time transformation method. J Sound Vib1983; 87: 543–554.
6.
CheungYKChenSHLauSL. A modified Lindstedt-Poincare method for certain strongly nonlinear oscillators. Int J Non-linear Mech1991; 26: 367–378.
7.
AlamMSYeasminIAAhamedMS. Generalization of the modified Lindstedt-Poincare method for solving some strong nonlinear oscillators, Ain Shams Eng J. 2019; 10: 195–201.
8.
HeJH. Modified Lindstedt-Poincare methods for some strongly nonlinear oscillations-I: expansion of a constant. Int J Nonlinear Mech2002; 37: 309–314.
9.
HeJH. Modified Lindstedt-Poincare methods for some strongly non-linear oscillations Part II: a new transformation. Int J Non-linear Mech2002; 37: 315–320.
10.
HeJH. Modified Lindsted-Poincare methods for some strongly nonlinear oscillations Part III: double series expansion. Inter J Nonlinear Sci Numer Simul2001; 2: 317–320.
11.
HeJH. Homotopy perturbation method for bifurcation and nonlinear problems. Int J Non-linear Sci Numer Simul2005; 6: 207–208.
12.
AnjumNHeJHAinQ, et al.Li-He’s modified homotopy perturbation method for doubly-clamped electrically actuated microbeams-based microelectromechanical system. Facta Univ-Ser Mech Eng2021; 19(4): 601–612.
13.
HeJHEl-DibY. The enhanced homotopy perturbation method for axial vibration of strings. Facta Univ-Ser Mech Eng2021; 19(4): 735–750.
14.
AnjumNHeJH. Homotopy perturbation method for N/MEMS oscillators. In: Mathematical methods in the applied sciences. Hoboken, NJ: Wiley, 2020.
15.
JiQPWangJLuLX, et al.Li–He’s modified homotopy perturbation method coupled with the energy method for the dropping shock response of a tangent nonlinear packaging system. J Low Freq Noise Vib Act Control2021; 40(2): 675–682.
16.
HeJ-HJiaoM-LGepreeldKA, et al.Homotopy perturbation method for strongly nonlinear oscillators. J Math Comput Simul2023; 204: 243–258.
17.
QieNHouaWFHeJH. The fastest insight into the large amplitude vibration of a string. Rep Mech Eng2021; 2(1): 1–5.
18.
KoochiAGoharimaneshM. Nonlinear oscillations of CNT nano-resonator based on nonlocal elasticity: the energy balance method. Rep Mech Eng2021; 2(1): 41–50.
19.
AnjumNHeJHHeCH, et al.A brief review on the asymptotic methods for the periodic behaviour of microelectromechanical systems. J Appl Comput Mech2022; 8(3): 1120–1140.
20.
AnjumNUl RahmanJHeJH, et al.An efficient analytical approach for the periodicity of nano/microelectromechanical systems’ oscillators. Math Probl Eng2022; 2022: 9712199.
21.
RehmanSHussainARahmanJUl, et al.Modified laplace based variational iteration method for the mechanical vibrations and its applications. Act Mech et Autom2022; 16(2): 98–102.
22.
SulemanMElzakiTWuQ, et al.New application of Elzaki projected differential transform method. J Comput Theoret Nanosci2017; 14(1): 631–639.
23.
AnjumNSulemanMLuD, et al.Numerical iteration for nonlinear oscillators by Elzaki transform. J Low Freq Noise Vib Act Control2020; 39(4): 879–884.
24.
LiFNadeemM. He–laplace method for nonlinear vibration in shallow water waves. J Low Freq Noise Vib Act Control2019; 38(3–4): 1305–1313.
25.
AskariHYounesianDSaadatniaZ. Nonlinear oscillations analysis of the elevator cable in a drum drive elevator system. Adv Appl Math Mech2015; 7(1): 43–57.
26.
BelendezAPascualCMarquezA, et al.Application of He’s homotopy perturbation method to the Duffing-harmonic oscillator. Int J Non-linear Sci Numer Simul2007; 8: 79–88.
27.
HeJH. A coupling method of homotopy technique and perturbation technique for nonlinear problems. Int J Non-linear Mech2000; 35: 37–43.
28.
MarincaVHerinasuN. A modified iteration perturbation method for some nonlinear oscillation problems. Acta Mech2006; 184: 142–231.
29.
LiaoSJ. An approximate solution technique not depending on small parameters: a special example. Int J Non-linear Mech1995; 30: 371–380.