
Abstract
The precision instruments and equipment are often utilized in low-frequency and micro-amplitude vibration systems, in which many vibration isolators of rubber materials are widely used. Ignoring the low-frequency amplitude will result in errors in the fatigue life design of the vibration isolators and predicting the dynamic response of each frequency band accurately becomes necessary. However, integer-order models cannot describe the frequency dependence of rubber materials, while the fractional-order models can describe it instead. On the other hand, the elastic restoring force is strongly nonlinear under large deformation, and the vibration of the nonlinear system contains multiple harmonic components. In order to solve those issues, the fractional nonlinear Nishimura model is used to characterize the constitutive relation of vibration isolators such as air springs, which are made of carbon black filled natural rubber. The high-order harmonic balance method is used to obtain the steady-state response of the vibration system, while the fourth-order Runge–Kutta method is applied to simulate the dynamic response of the system in the low-frequency region, and the Lyapunov exponent is used to determine the stability of the system. Furthermore, the influence of parameters on the amplitude–frequency characteristics of different frequency bands is also studied, and a method to solve the optimal damping coefficient is proposed based on the primary resonance amplitude–frequency curves. The results show that there is a diversity of periodic motions in the process of adjacent super-harmonic resonance transition. Numerical simulations also demonstrate that multi-periodic motions coexist in the system. The motion transition law between the polymorphic coexistence region and its adjacent regions is summarized.
Keywords
Introduction
With the development of society, viscoelastic materials have been developed rapidly in the field of vibration control and have shown superior benefits in reducing noise and vibration. It is widely applied in aviation, machinery, civil engineering, as well as many other fields, such as metal rubber in spacecraft vibration reduction, and air springs in high-speed train bogies.
In order to accurately characterize the relaxation and creep of viscoelastic materials, the Kelvin model, Maxwell model, Zener model, and Nishimura model are applied to describe viscoelastic system.1–5 Zheng et al. 6 used the Kelvin model to describe the mechanical properties of air springs and analyzed the oscillation attenuation characteristics of the transmission force of air springs. Zhu et al. 7 proposed a linear Zener model that can describe the dynamic stiffness of air springs with an auxiliary chamber based on engineering thermodynamics and the aerodynamic theory. Wu et al. 8 investigated the accuracy of the dynamic stiffness of air springs described by the Zener model based on the thermodynamic point of view and found that air springs are dependent on nonlinear parameters and frequencies. Larsson et al. 9 studied the micro-mechanically driven, quasi-static to dynamic failure response of fiber-reinforced unidirectional composite viscoelastic materials under finite deformation conditions based on the Zener model. Besides, the Nishimura model is also adopted to describe the mechanical properties of the air spring. 10 Ryaboy 11 discussed a series of issues that need to be considered in the establishment of dynamic models from the perspective of air spring design and application. The rubber materials of the rail pads and air springs, mainly, are carbon black filled natural rubber.12,13 The viscoelastic properties of rubber materials can be changed by changing the molecular structure or adjusting the filler proportion. The external force response of rubber is divided into the elastic and viscous parts, and the strain will fall behind the stress. The Nishimura model is more popular to be applied to describe the dynamic properties of air springs in practical situations. 10 Compared with the Kelvin model and the Zener model, the Nishimura model is more popular to be applied to describe the mechanical properties of air springs in practical situations.
Fractional calculus has not been investigated and developed for a long time due to the lack of practical application background. In recent years, with the rapid development of computer technology, the definition, characteristics, and calculation of fractional calculus have been more and more applied in the field of engineering.14,15 There are several definitions of fractional-order derivatives, such as Grünwald-Letnikov, Riemann-Liouville, Caputo definitions, 16 He’s fractional definition, 17 He’s fractal derivative, 18 and so on. 19 The local fractional derivative was first proposed by Yang, and it is an excellent tool to describe a lot of natural phenomena in fractal space. 20 Recently, the two-scale fractal theory appeared as a powerful mathematical tool to porous media or unsmooth boundary problems, 21 and one is for the continuum model on a large scale, the other is figuring out the porous structure of the studied object on a small scale. 22 Moreover, the nonlinear vibration in a porous medium can be modeled by the fractal vibration theory, which was first proposed by He et al.23,24 Although traditional integer-order models can be applied to describe the mechanical properties of vibration isolation materials, the description of the frequency dependence phenomenon in vibration isolation systems is lack of investigations. 8 From this point of view, the fractional-order model is more accurate in practical engineering situations.12,25,26 Fractional-order models can be applied to not only describe the amplitude dependence and frequency dependence of rubber but also the stress relaxation and creep properties of viscoelastic materials.27–29 However, the vibration isolation system can be approximated as a linear elastic system; only when the deformation is small, it behaves as a nonlinear system beyond this range.30,31
Although the nonlinear characterization is closer to practical engineering, the dynamic response is more complex, even bifurcation and chaos occur. Among all kinds of approximate analytical methods, the harmonic balance method is the clearest in concept. For vibro-impact problems, the harmonic balance method is widely used in systems with nonlinear restoring forces, such as quasi-zero stiffness systems,32,33 origami metamaterial systems, 34 and viscoelastic systems. 35 Besides, the harmonic balance method is also applied to the computation of periodic orbits for piecewise linear oscillators. 36 In addition to the harmonic balance method, many other effective methods for solving nonlinear systems exist. Wang et al. 20 used local fractional calculus and applied the variational iteration method to obtain the KdV-Burgers-Kuramoto equation approximate analytical solution. He et al. 21 used the two-scale transform to convert the nonlinear Zhiber-Shabat oscillator with the fractal derivatives to the traditional model. The homotopy perturbation method has been demonstrated under a suitable transformation of the system containing several exponential nonlinear terms to the famous Helmholtz-Duffing oscillator. Chen et al. 37 established a nonlinear dynamic model of the suspension of the maglev system and solved the chaotic threshold by using the Melnikov method. Xu 38 proposed a nonlinear Kelvin model of a rolling lobe air spring and analyzed the relationship between geometric parameters and stiffness characteristics through experiments. Li et al. 39 developed a viscoelastic model of dielectric elastomer and studied the influence of the viscoelastic strain enhancement effect on the resonance frequency and oscillation amplitude. Sharma et al. 40 applied the Zener model to investigate the impact of visco-elasticity on the electromechanical response of complex dielectric elastomeric actuators involving inhomogeneous deformations. Qi et al. 41 utilized the Lyapunov exponent to analyze the stability of fractional-order nonlinear time-varying systems. Shen et al.16,42,43 studied the approximate analytical solutions of fractional Duffing oscillator and fractional van der Pol oscillator through the average method and proposed the concepts of the equivalent linear stiffness and the equivalent linear damping. Zhang et al. 32 predicted the dynamic response of a geometrically nonlinear system with negative stiffness by using the higher harmonic balance method and analyzed its vibration isolation performance. Zhou et al. 44 studied the dynamic response and stability of a two-degree of freedom vehicle system under nonlinear external force. Jena et al. 45 analyzed the time-fractional fuzzy vibration equation of large membranes by using the double parametric-based Residual power series method. Matouk 46 studied the local stability of the system’s three equilibria when the fractional parameter belongs to (0,2]. According to Hopf bifurcation theory in fractional-order systems, approximations to the periodic solutions around the system’s three equilibria are explored.
In practical engineering, viscoelastic materials are neither ideal solid nor ideal fluid, but between them. Polyborosiloxanes were invented initially in the search for substitutes of natural rubbers, possess reversible physical cross-linking, and the viscoelasticity of rubber materials can be adjusted by changing the molecular structure of cross-linking. 47 However, the rubber materials exhibit frequency-dependent and nonlinear characteristics. 7 Fortunately, fractional-order calculus can represent the frequency-dependent properties of viscoelastic materials, and the superelasticity of a material can be described by the Duffing equation. 48 Due to nonlinear factors, the dynamic response is more complex, especially in the low-frequency region, and even super-harmonic resonance occurs. The precision instruments and equipment are often utilized in low frequencies and micro-amplitude vibration environments. However, the vibration isolators of rubber materials are widely used in micro-vibration isolation. As we know, the fatigue failure of components is related to the amplitude of different frequencies. Ignoring low-frequency amplitude will result in errors in the fatigue life design of the vibration isolators, and predicting the dynamic response of each frequency band accurately becomes necessary.49,50 The nonlinear system also has a diversity of periodic motions, the motion transition process is more complicated, and even polymorphism coexists, which affects the accurate prediction of the dynamic response in the low-frequency region. 51 The investigations on the dynamic characteristics of integer-order nonlinear systems have been relatively mature. In contrast, the diversity of periodic motions and the transition laws of fractional-order nonlinear systems need to be revealed.52,53
To reveal the dynamic response of the fractional nonlinear vibration isolation system, this paper focuses on the investigations of super-harmonic resonance and the diversity of periodic motions of the system. The high-order harmonic balance method is used to obtain the steady-state response of the vibration system, while the fourth-order Runge–Kutta method is applied to simulate the dynamic response of the system in the low-frequency region. Furthermore, the influence of parameters on the amplitude–frequency characteristics of different frequency bands is also studied. On the other hand, two Poincaré maps are established to describe the diversity of periodic motions and the transition law, and the Lyapunov exponent is used to determine the stability of the system. Finally, the relationship between super-harmonic resonance and the diversity of periodic motions of the system is analyzed. The system parameters that affect amplitude-frequency characteristics, bifurcation, and chaos are further revealed.
Analysis of fractional nonlinear Nishimura model
The air springs are made of carbon black filled natural rubber,
13
and the mechanical properties of rubber materials are between ideal elastic bodies and ideal viscous bodies. However, integer-order models cannot describe the frequency dependence of rubber materials, while the memory recovery force is needed to be described by fractional differential operators.15–17 The Nishimura model is more popular to be applied to describe the dynamic properties of air springs in practical situations, and model parameters are related to the upper and lower chamber stiffness of the air spring and the gas viscosity through the orifice plate.
11
The fractional nonlinear Nishimura model is applied to describe the viscoelasticity and nonlinear features of rubber and air springs as shown in Figure 1. The model of fractional nonlinear vibration isolation system.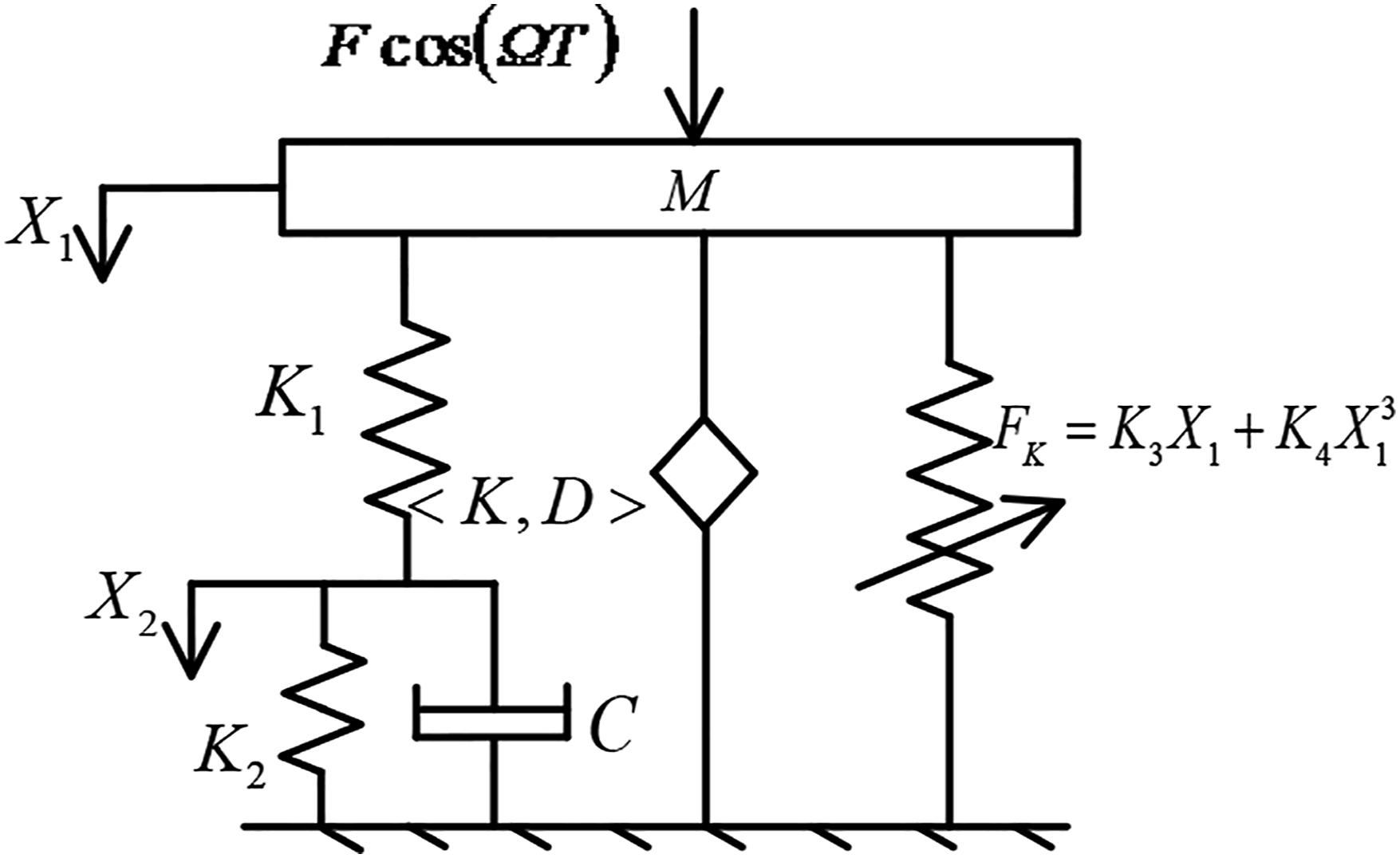
Consider the following motion state of the vibration isolation system under periodic excitation. The equation of the dynamic model is

The control parameter of external excitation amplitude F is introduced into Fs, and the following variables are replaced.

The dimensionless differential equation of the system can be rewritten as

The fractional-order derivative defined by Caputo is conducive to the solution of the actual physical system and has more application value in practical engineering.16,42,43 In order to represent the frequency-dependent properties of viscoelastic materials, here Caputo’s definition is adopted



Substituting equation (5) into equation (2) and introducing the formula in42,43
Taking the first-order approximation simplification of the fractional term and equation (3) can be obtained as

The fractional term is obtained by equation (7). Viscoelastic materials are neither ideal solid nor ideal fluid, but between them. According to the Caputo definition, the fractional-order derivative can be reduced to the form of integer-order trigonometric functions, which can describe not only the viscoelasticity of materials, but also the frequency correlation of materials. Shen et al. 43 verified the rationality by using the first-order trigonometric function to represent the fractional-order derivative in practical engineering applications. This paper mainly studies the case where the amplitude of the higher harmonics of the vibration isolation system is much smaller than the amplitude of the fundamental wave, and the fractional-order derivative simplification ignores the high-order terms is reasonable.
Substituting equation (7) into equation (2), the dimensionless differential equation of the system can be rewritten as

The equivalent linear stiffness coefficient Keq and equivalent damping coefficient Ceq of the system can be rewritten as

It can be seen from equation (9) that the fractional coefficient

Figure 2 can be obtained by taking the fractional order The equivalent linear stiffness coefficient Keq and equivalent damping coefficient Ceq with different values of fractional coefficient 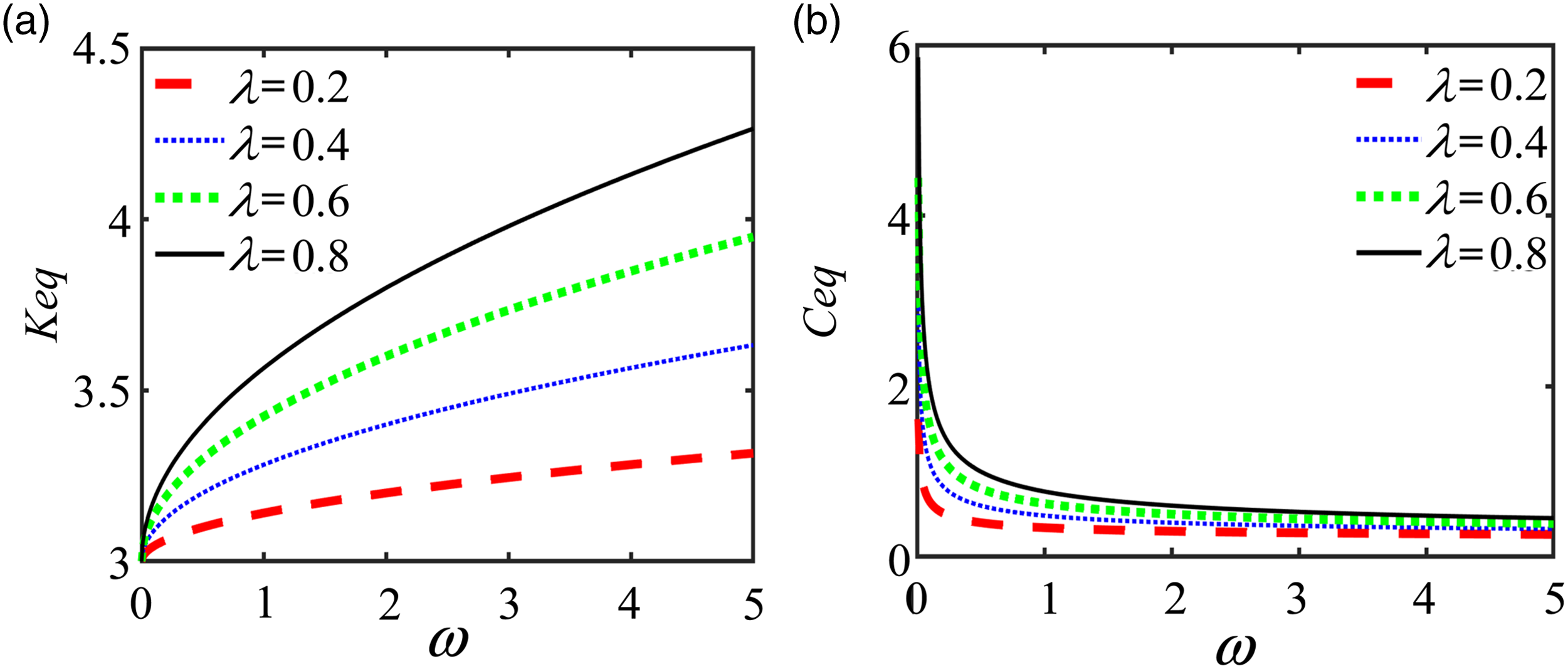
Figure 3 can be obtained by taking the fractional coefficient The equivalent linear stiffness coefficient Keq and equivalent damping coefficient Ceq with different values of fractional order p: (a) the equivalent linear stiffness coefficient Keq and (b) the equivalent damping coefficient Ceq.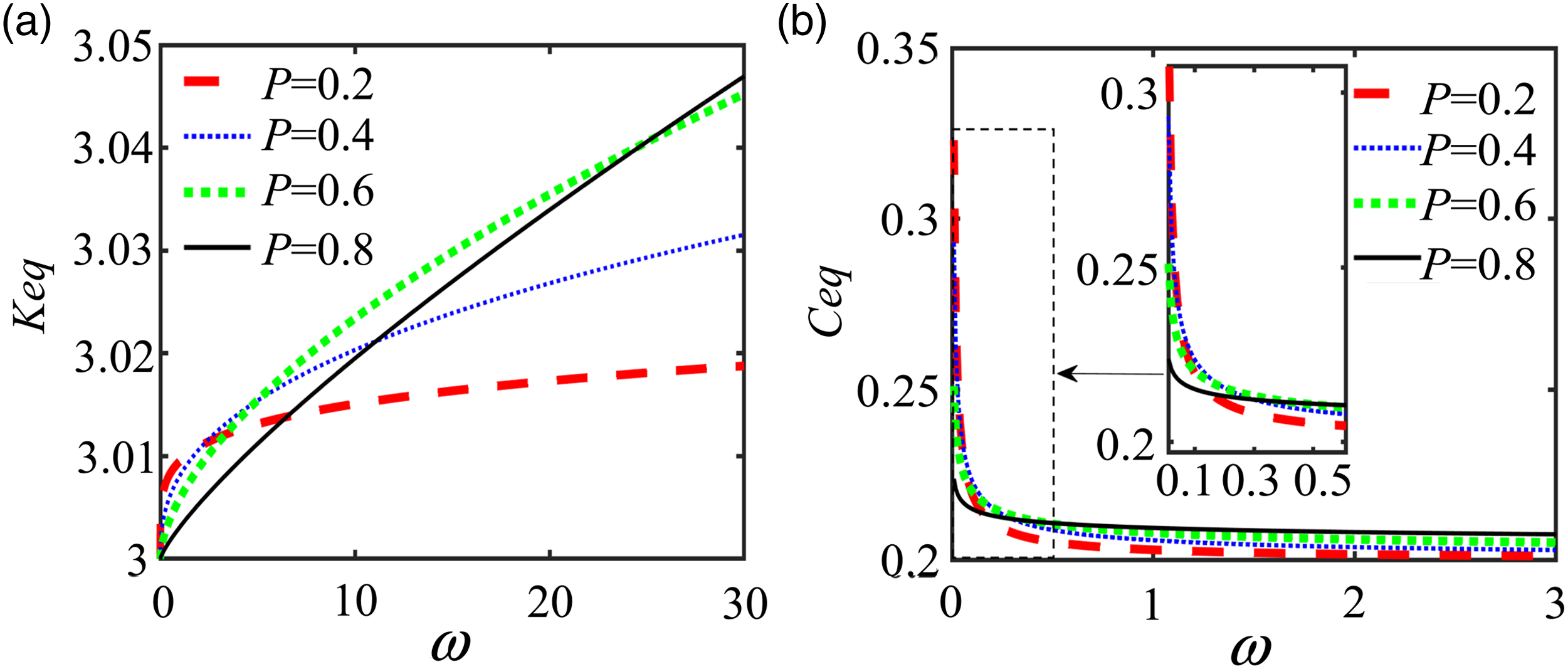
It is observed that different values of fractional coefficient
The steady-state response of the node could be supposed as


Substituting equation (11) into equation (2) to perform first-order harmonic balance, the relationship between the mass block and the node of amplitude and phase can be obtained as

Substituting equation (12) into equation (11), the first-order steady-state response of the mass block can be obtained as

Substituting equations (13) and (11) into equation (8) can be obtained as

Then the first-order amplitude and phase of the node can be solved as


The first-order harmonic balance method can only obtain the primary resonance of the system but cannot obtain the super-harmonic resonance. In order to further study the dynamic response in the low-frequency region, the high-order harmonic balance method is applied.
52
The harmonic amplitude coefficients of each order of the node are solved at first, and the maximum displacement in the time history graph is selected as the amplitude. Finally, the high-order response of the mass block is obtained.
53
When n = 2, the third-order harmonic balance method is used to suppose the response of the node as

Performing the third-order harmonic balance on equation (18), the following equations can be obtained as

The values of the node amplitude coefficients a1, b1, a3, and b3 can be obtained with certain system parameters.
53
Then the amplitude coefficients of the node are substituted into equation (2), and the amplitude coefficients of the mass block can be obtained as

The third-order steady response of the mass block can be obtained as

According to the solution process of the third-order harmonic balance method, the higher harmonic response of the system can be obtained by analogy.
In order to compare the solution results, a sample chosen system of particulars is given by the following parameters

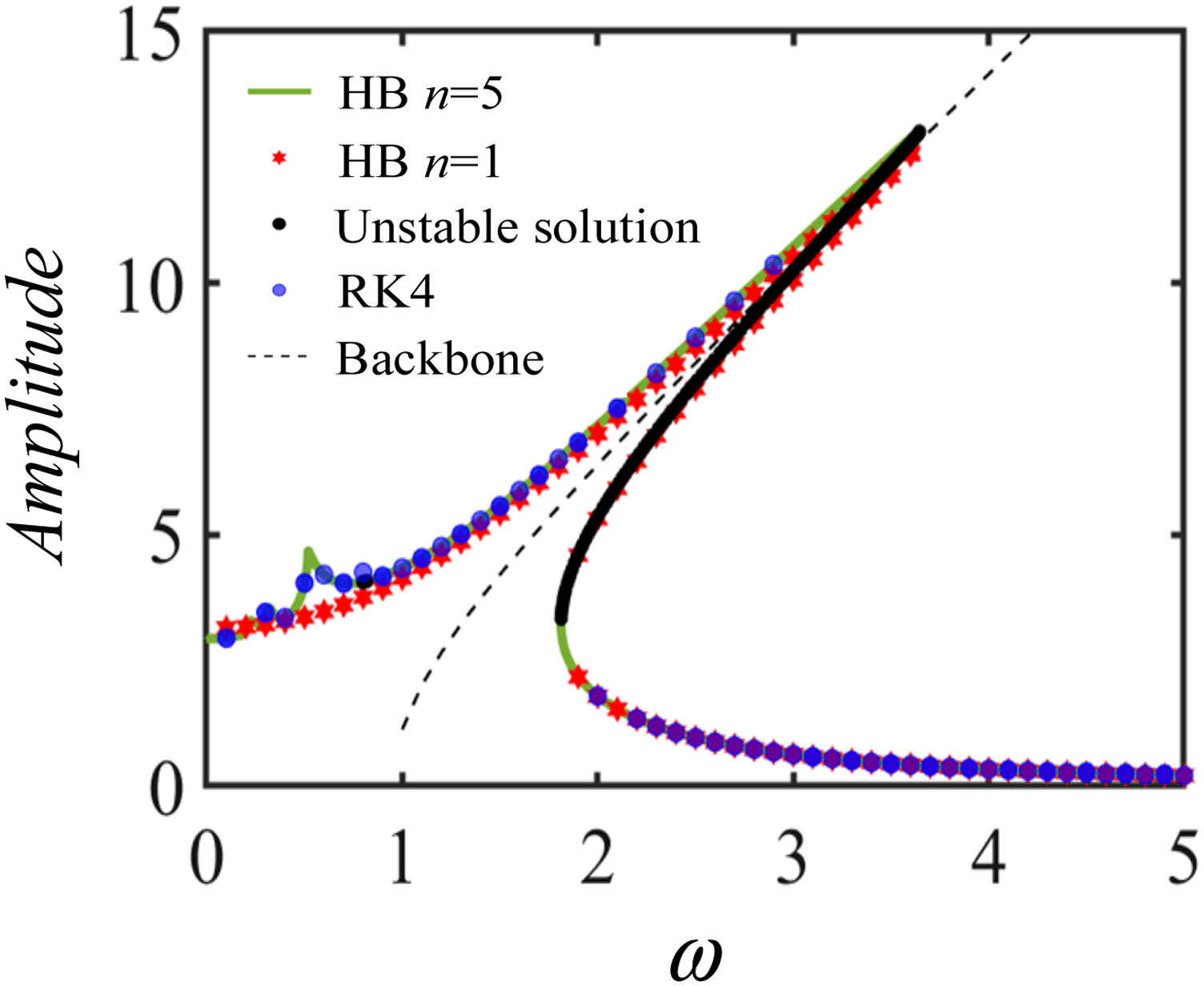
The fourth-order Runge–Kutta method is used to solve the system numerically, and the virtual experimental simulation of the vibration isolation system is carried out through the dynamic simulation software UM. Figure 4 illustrates that there is roughly consistency between numerical results obtained from the approximate and exact equations. The amplitude–frequency characteristics of the system can be obtained through sweeping the excitation frequency as shown in Figure 5. A small hump appears in the amplitude-frequency curve of the low-frequency range when the super-harmonic resonance is taken into consideration. It is evident that although the primary harmonic is the dominant frequency of the spectrum, it can also be observed that the super-harmonic response will occur with a small amplitude in the spectrum that affects the system behavior around the resonance peak. Time history diagram of the mass block: (a) transient response and (b) steady-state response. The amplitude–frequency curves of the mass block by different methods.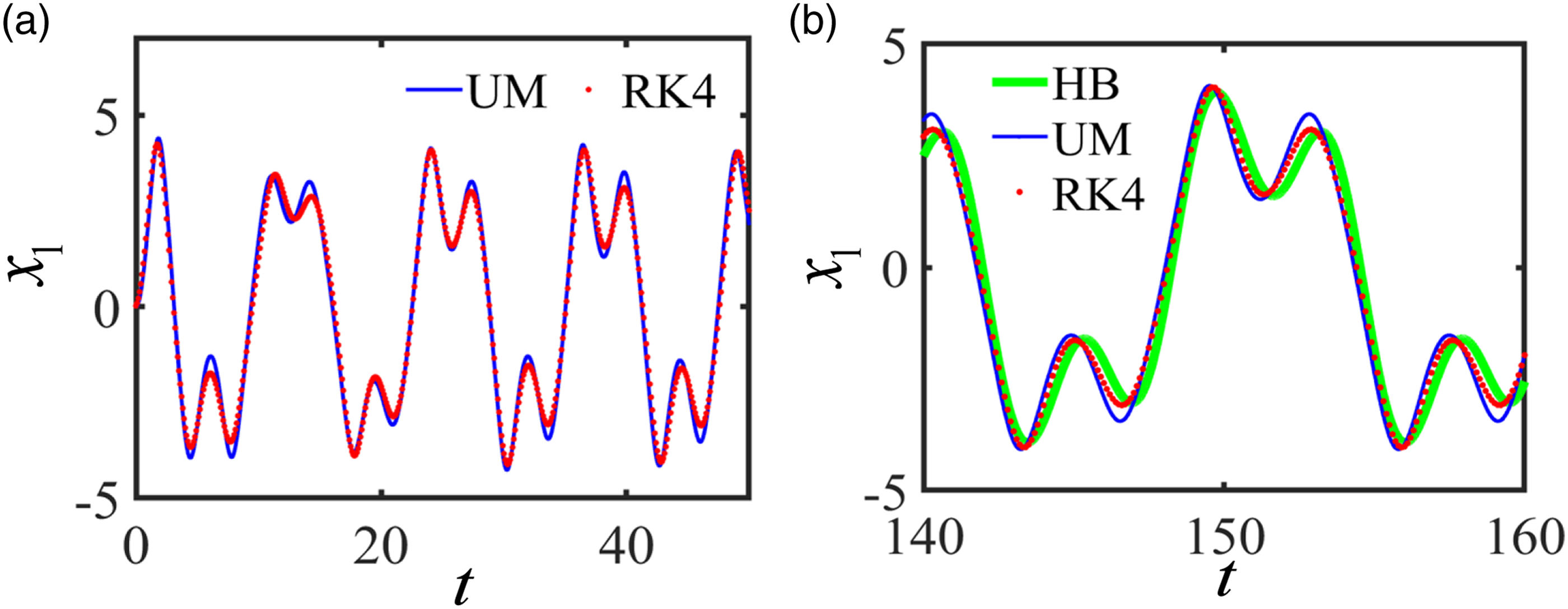
Amplitude–frequency characteristics
The fatigue failure of the parts of the vibration isolation system is related to the amplitudes of different frequencies. For a vibration isolation system, it is necessary to predict each frequency range dynamic response accurately. This subsection selects the following benchmark parameters

The variation of parameters has great effects on the amplitude–frequency response, Figure 6 illustrates how the response curves behave. The amplitude-frequency curves of the mass block with different (a) parameter 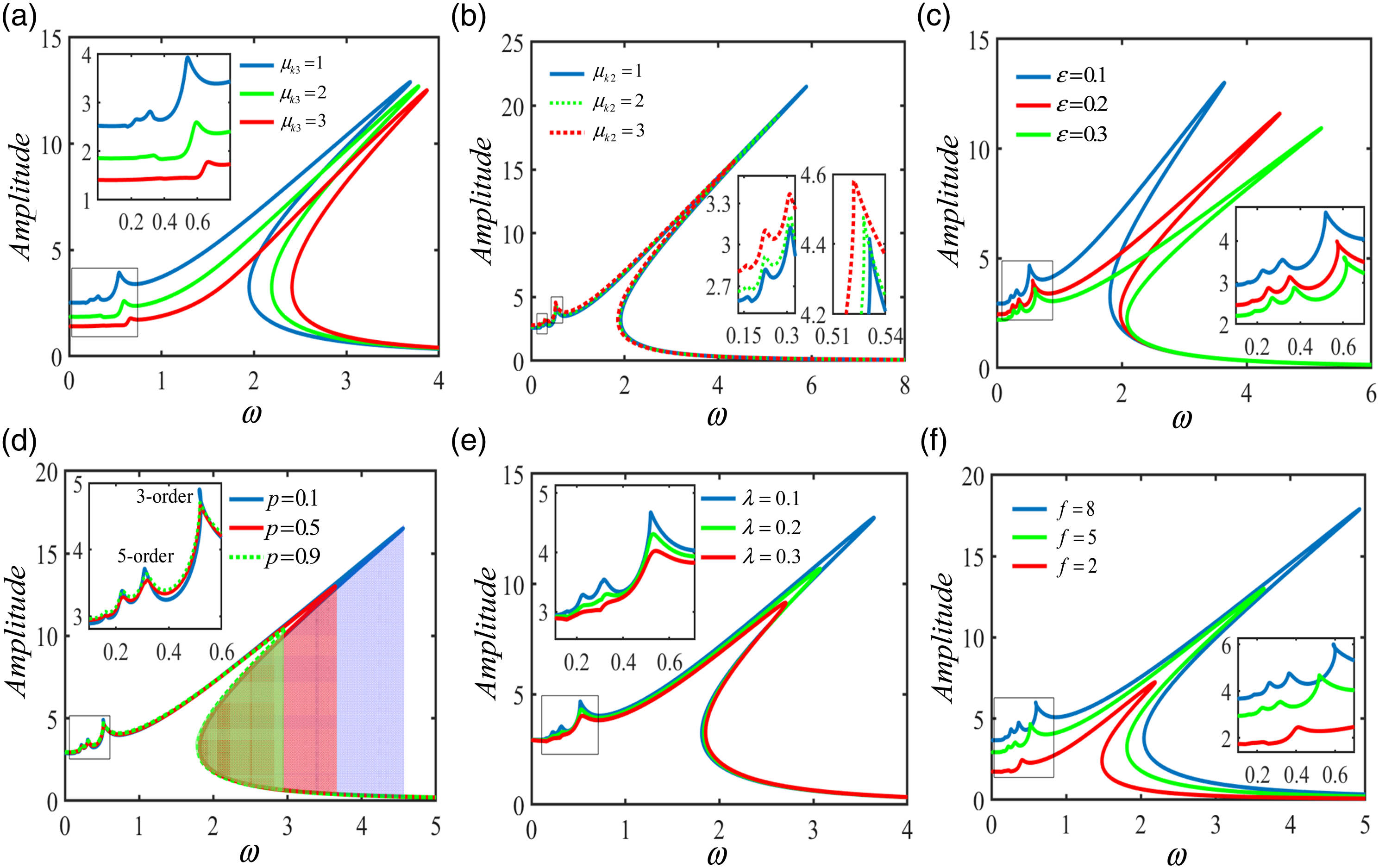
By comparing the amplitude–frequency curves of the system, it can be noticed from Figure 6(a) that the increase of parameter
Figure 6(b) illustrates that as parameter
As shown in Figure 6(c), the primary resonance peak decreases from 13.01 to 10.94, while the resonance frequency increases from 3.644 to 5.196 as parameter
According to Figure 6(d), the primary resonance peak decreases from 16.52 to 10.31, while the resonance frequency decreases from 4.556 to 1.791 as fractional order p increases from 0.1 to 0.9. Moreover, the frequency range of primary resonance polymorphic coexistence reduces from 2.765 to 1.165. It can be seen that the third-order super-harmonic resonance peak decreases from 4.911 to 4.667 as fractional order p increases from 0.1 to 0.5, and increases from 4.667 to 4.7 as fractional order p increases from 0.5 to 0.9.
Figure 6(e) shows that the primary resonance peak decreases from 13.01 to 9.042 and the resonance frequency decreases from 2.646 to 2.696 as fractional coefficient
As shown in Figure 6(f), the primary resonance peak increases from 7.207 to 17.89, and the resonance frequency increases from 2.187 to 4.922 as parameter f increases from 2 to 8. Moreover, the third-order super-harmonic resonance peak increases from 2.454 to 5.793, and the resonance frequency increases from 0.4107 to 0.5915.
As shown in Figure 7, the primary resonance peak decreases from 10.45 to 9.126 while resonance frequency decreases from 2.896 to 2.596 as parameter Effect of parameter 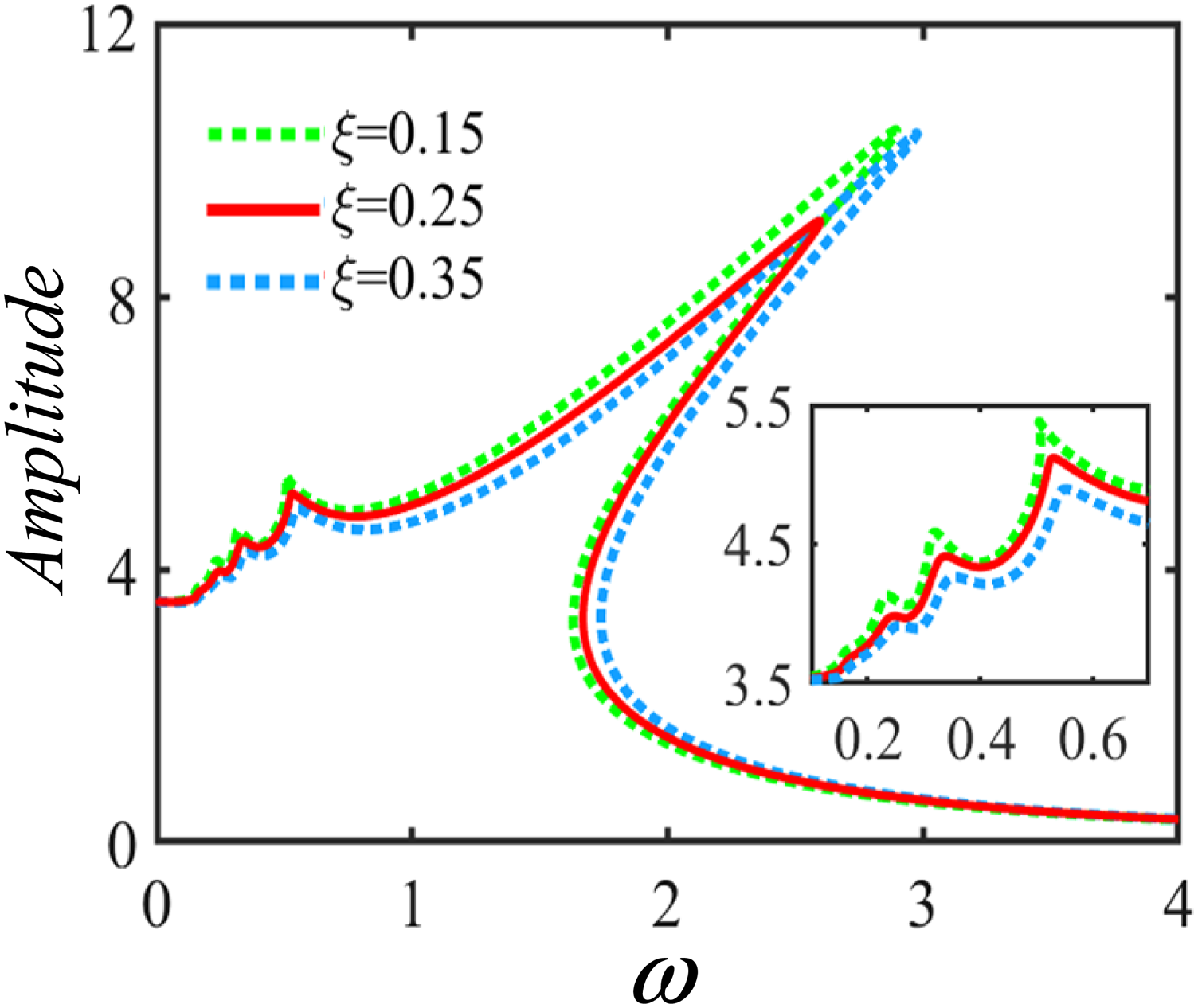

Then the optimal parameter

The damping coefficient Schematic diagram of optimal damping coefficient of principal resonance 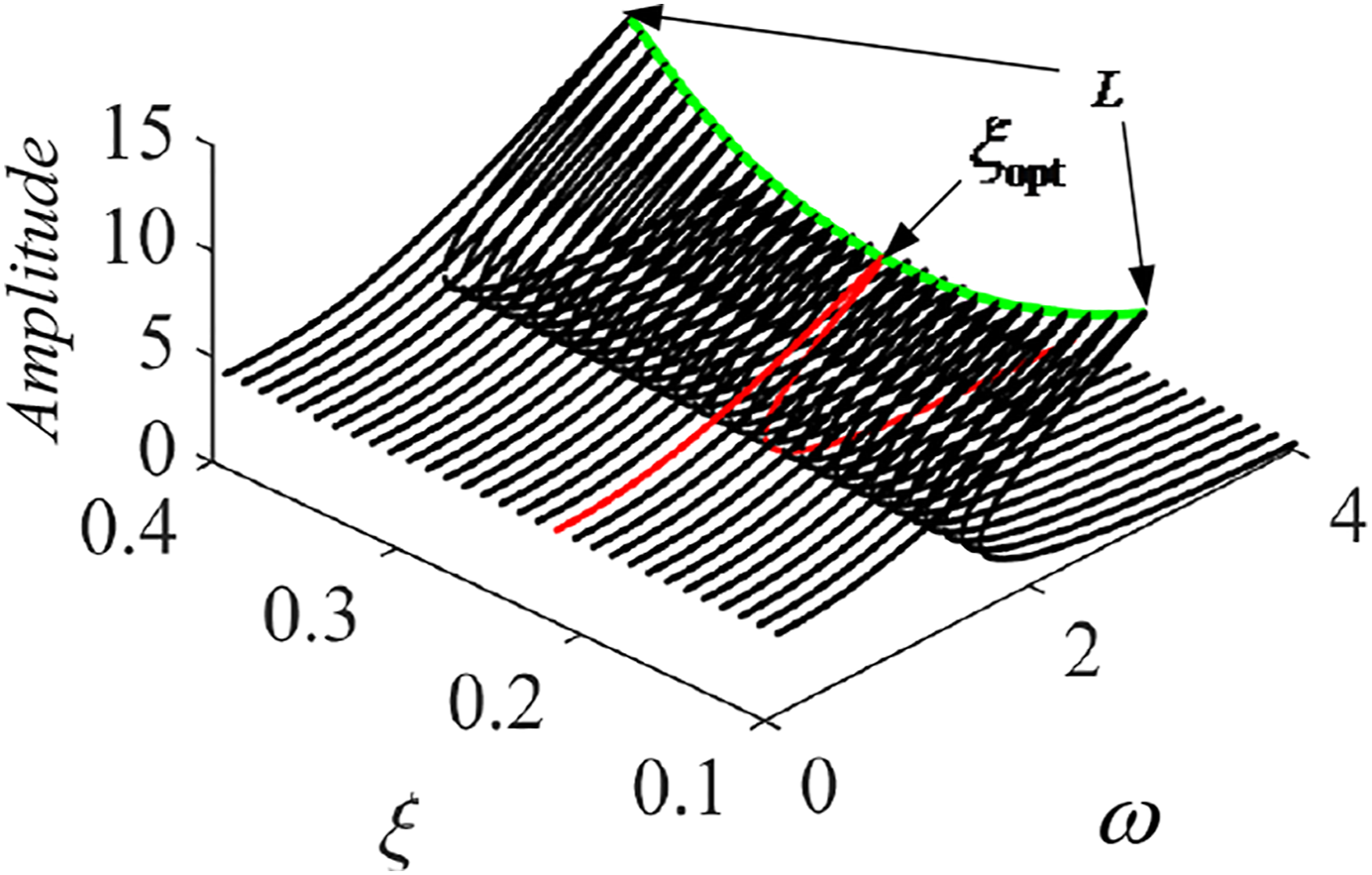
The diversity of periodic motions of super-harmonic response
The super-harmonic response is rigorous in the mathematical sense, and it has a great significance for engineering applications. In order to investigate the diversity and local bifurcation of the periodic motions of the system in the low-frequency region, the Poincaré mapping of the system is established. Select the mapping section

Taking n = 5 and using the high-order harmonic balance method to obtain the super-harmonic resonance of the mass block. Combined with Poincaré mapping, the motion state of the mass block can be obtained as shown in Figure 9. Dynamic characteristics of super-harmonic resonance.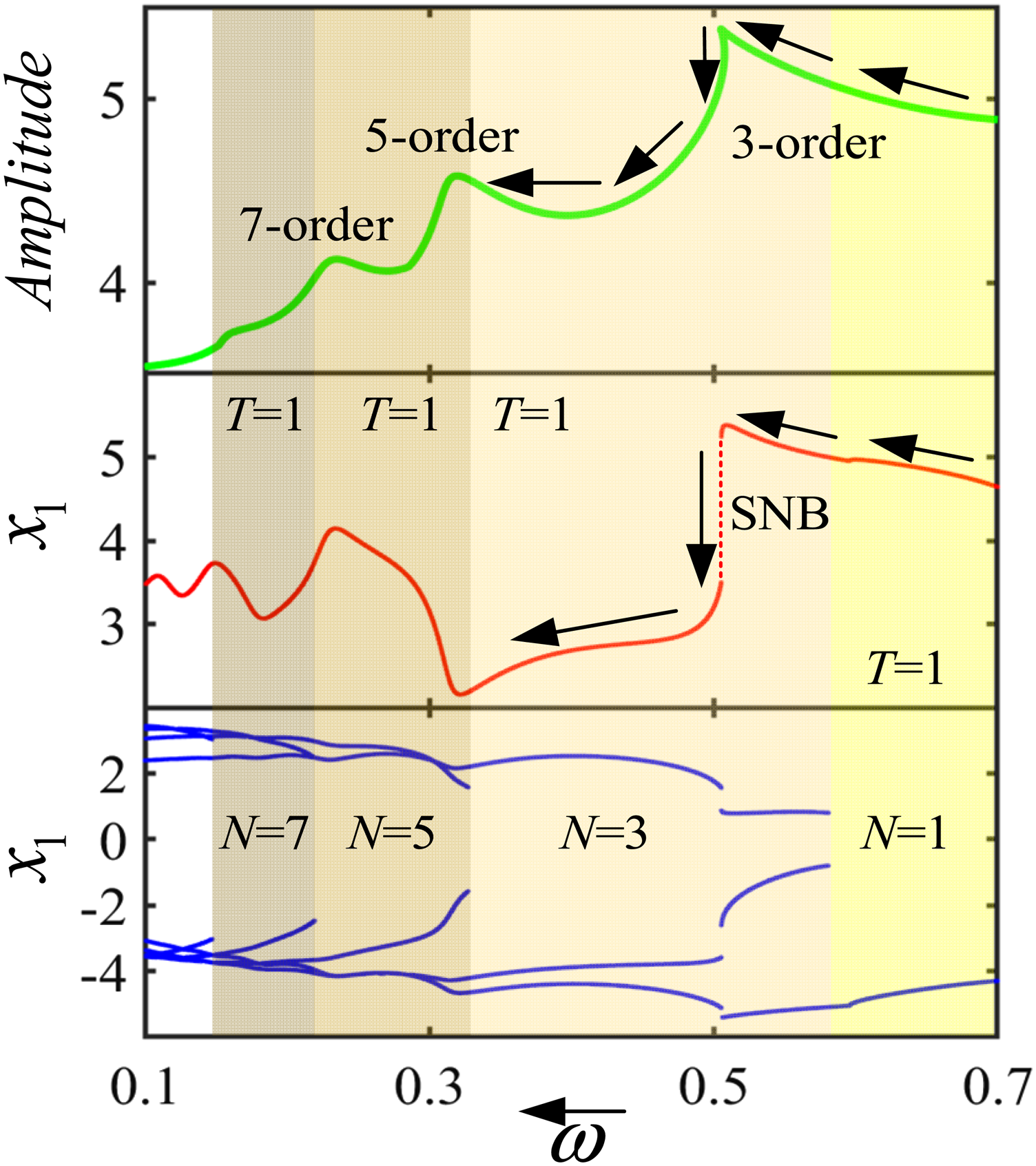
It is observed that there is a diversity of periodic motions of super-harmonic resonance. SNB is used for the saddle junction bifurcation. In addition to the polymorphic coexistence and SNB in the primary resonance, the super-harmonic resonance in the low-frequency region also has polymorphic coexistence. The jumping direction of the amplitude-frequency curve is consistent with the SNB mutation direction in the bifurcation diagram. It is observed that decreasing the frequency, the periodic motions conform to the following rules: 1–1→1–3→SNB→1–3→1–5→1–7. The higher the order of the super-harmonic resonance is, the more the simple harmonic vibrations in the periodic motions are. Moreover, the order of the simple harmonic vibration in the periodic motions is approximately the same as the order of the super-harmonic resonance.
As shown in Figure 10, the dynamic response with different frequency bands is in the low-frequency region. The diversity of periodic motions of super-harmonic resonance: (a) 1–1 periodic motion at 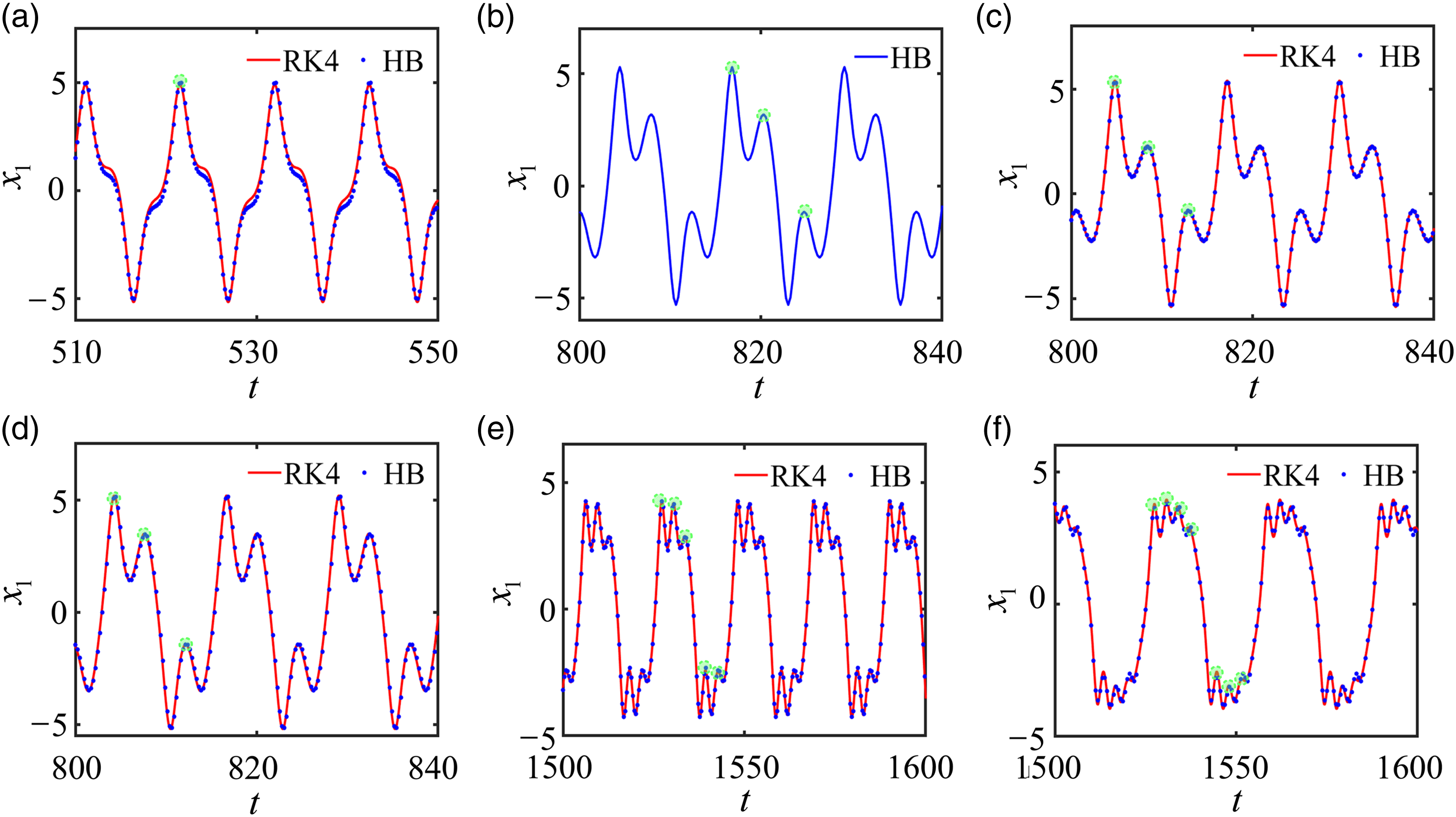
As frequency
Analysis of bifurcation characteristics
Since the restoring force of the Duffing system is an odd function, the motion state of the system also presents an antisymmetric motion trajectory in the phase diagram.
51
Moreover, the motion transition law is more complicated. The bifurcation characteristics and stability of periodic motions of the fractional nonlinear vibration isolation system are further analyzed. On the Poincaré mapping of the fixed phase plane, the response after a certain moment

In order to investigate the distribution type of the periodic motion of the system and its transition law, the symbol

The forward and backward sweeping bifurcation diagrams are depicted respectively in Figure 11, which indicates that there are coexisting motions under a given parameter condition. The Lyapunov exponent is adopted to determine the existence of the stable periodic motion and the chaotic motion. When the maximum Lyapunov exponent is close to 0, the system has bifurcation. When the maximum Lyapunov exponent is greater than 0, the system is judged to be in chaotic motion. Bifurcation and the Lyapunov exponent diagram: (a) forward sweeping and (b) backward sweeping.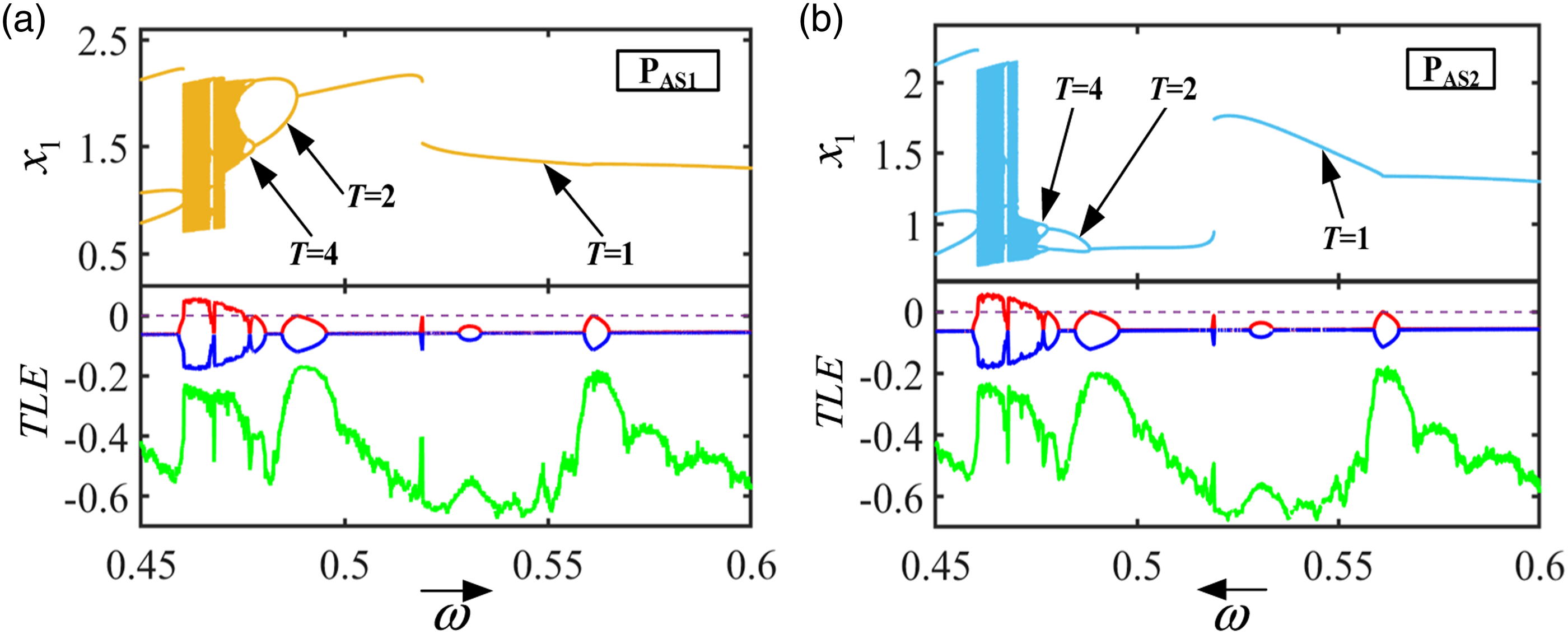
The above bifurcation analysis also indicates that the system may respond in various motion states, either in stable periodic motion states or in unstable chaotic ones.
As shown in Figure 12, excitation frequency changes induce the appearance of various bifurcation types. PDB is used for period-doubling bifurcation, IPDB for inverse period-doubling bifurcation, PFB for the pitchfork bifurcation, IPFB for the inverse pitchfork bifurcation, CIC for the catastrophic bifurcation, and BC for the boundary crisis. As frequency Polymorphic coexistence bifurcation diagram.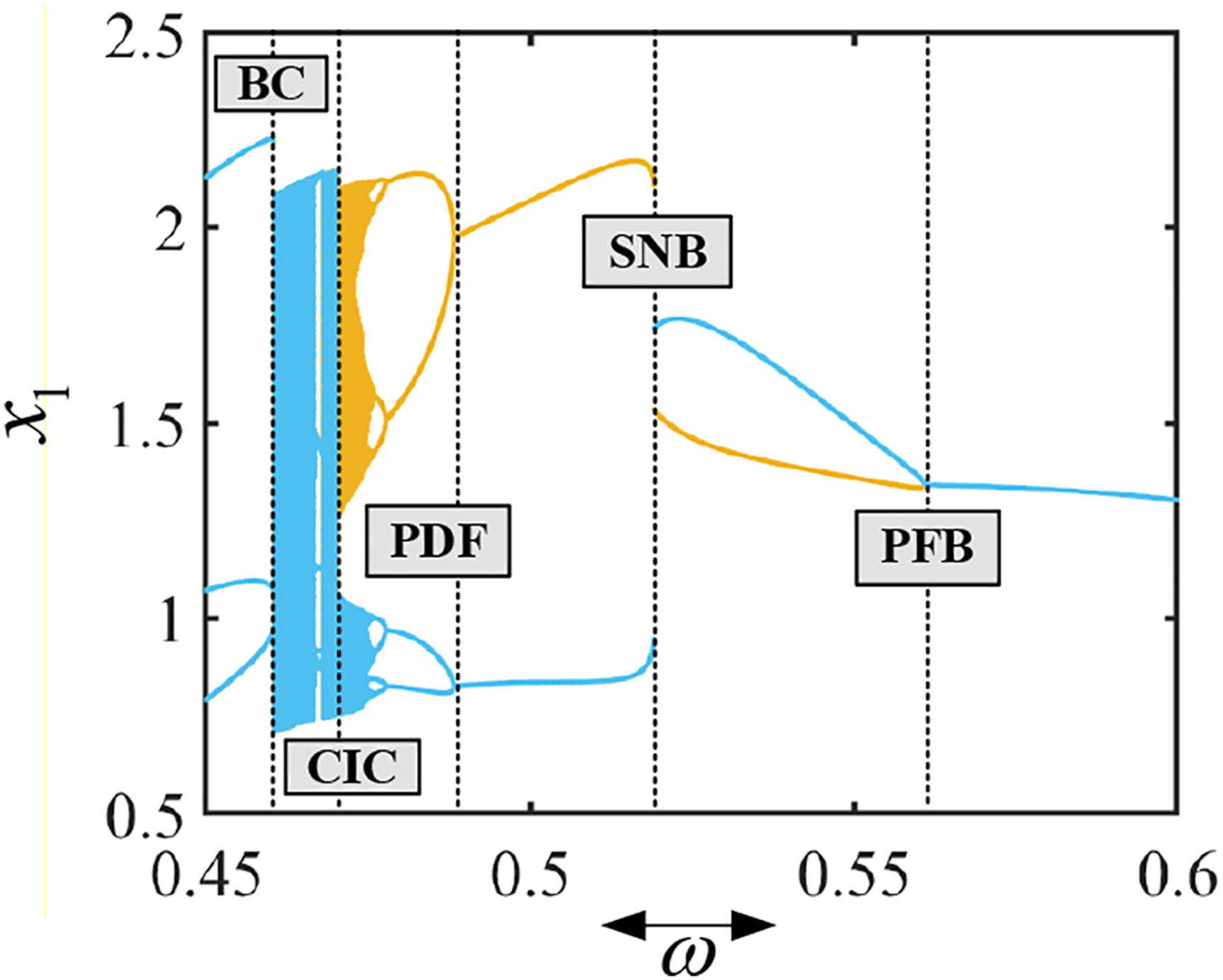
It is observed that for the backward sweeping of frequency, the response occurs first in PAS2-1 motion when frequency Phase trajectories and attractors of different response types when (a) 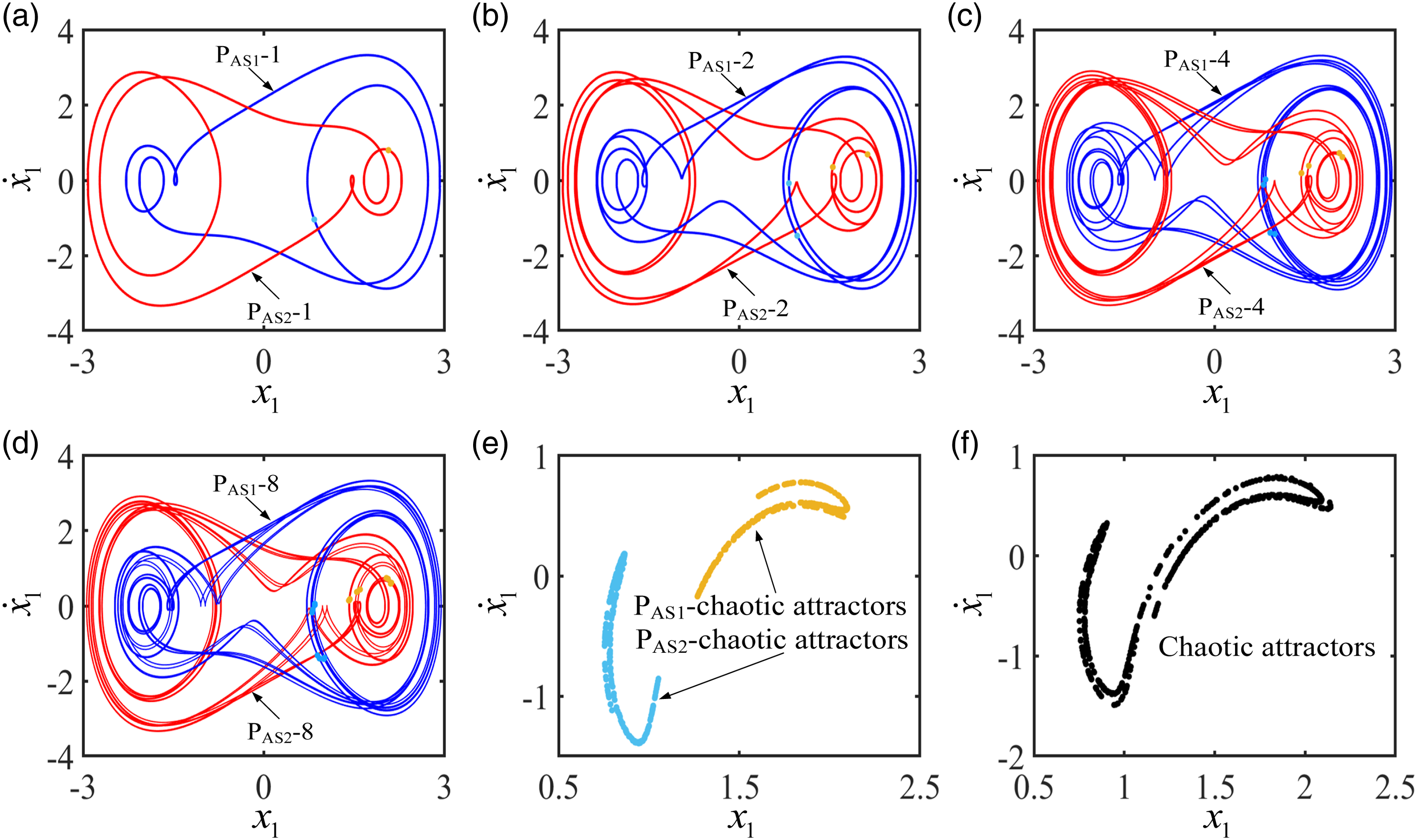
When neighboring periodic motions transfer to each other, the transfer process is irreversible. Furthermore, the polymorphic coexistence region is composed of two neighboring periodic motions. In order to gain a better insight into the effect of frequency on the dynamics of the system, the cell mapping method is used with the selected initial state domain in The attraction domain on the phase-fixing surface when (a) 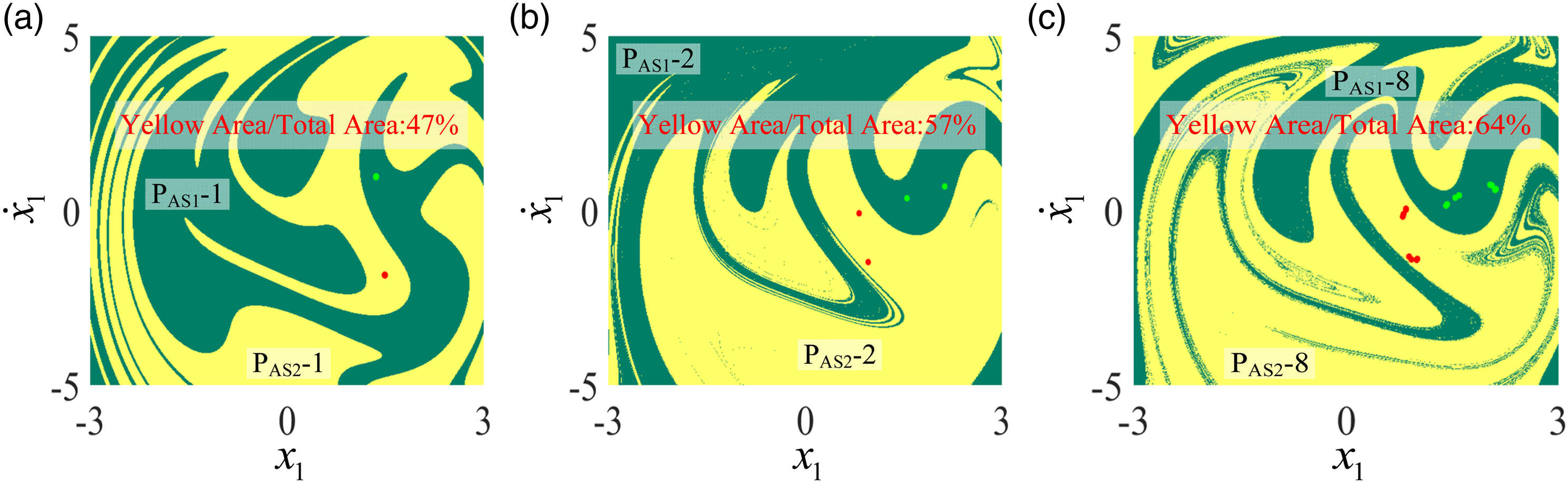
Since there are various types of bifurcations in the system such as SNB, PDB, PFB, and BC, chaos can even occur under these bifurcations and the process is irreversible. The specific motion transition law is shown in Figure 15. Multi-state coexistence and motion transition law of adjacent regions.
Conclusion
In this study, the fractional nonlinear Nishimura model is used to characterize the constitutive relation of the fractional nonlinear vibration isolation system. The dynamic responses are obtained by using the high-order harmonic balance method, the super-harmonic resonance, and the diversity of periodic motions of the system are investigated. The Poincaré map is used to determine the characteristics of the periodic motions of the system, and the Lyapunov exponent is used to determine the stability of the system. Combined with the cell mapping method, the transition law between adjacent periodic motions of the system is summarized. The influence of system parameters on the amplitude–frequency characteristics is analyzed. The main conclusions are as follows (1) There is a diversity of periodic motions in the low-frequency region of the system. The dynamic response contains not only primary harmonic component but also multiple super-harmonics components. As the excitation frequency decreases, the number of periodic motion simple harmonic vibrations increases, and the order of the simple harmonic vibration in the periodic motions is approximately the same as the order of the super-harmonic resonance. The frequency corresponding to SNB is consistent with the amplitude–frequency curve jumping frequency. Moreover, the jumping direction of the amplitude–frequency curve is consistent with the mutation direction of the saddle-junction bifurcation. (2) There are coexisting motions under a given parameter condition. In the transition process, various bifurcation types such as PFB, SNB, PDF, and BC occur successively. Even more, chaos will occur under bifurcation inductions but the process is irreversible. (3) The integer-order parameters of the system influence the super-harmonic resonance. As the damping coefficient (4) The fractional-order derivatives of the system influence the super-harmonic resonance. As fractional coefficient
To sum up, this paper provides a fundamental insight into the design and optimization of the dynamic response of the viscoelastic vibration isolation system with a small amount of higher harmonics under micro-vibration. The research results will pay contributions to a better understanding of the effect of parameters on the super-harmonic resonance and periodic motion transition characteristics of fractional nonlinear vibration isolation system. When designing the vibration isolation systems in practical engineering, the appropriate system parameters should be selected to avoid the nonlinear jump phenomenon, bifurcation, and chaos in the dynamic response.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work has been supported by the Netural Science Foundation of China (11962013, 11732014, 12162020), Gansu Youth Science and Technology Fund (21JR7RA335).
Appendix
The defined parameters for amplitude-frequency response in equation (19) are as follows