
Abstract
Stick-slip vibration is regarded as one of the major factors that negatively influence the efficiency of the drilling processes. Therefore, it would be highly preferable to overcome the stick-slip vibration challenge through an effective control scheme. This study aims to address the stick-slip vibration problem in oil well drill-strings through a novel concept of an optimal hybrid fractional order fuzzy logic control (OH-FOFLC) scheme. By combining the robustness of fuzzy logic with the convergence speed of the fractional order method, the proposed scheme may enhance tracking performance in drill-strings under various operating conditions. In addition, the fuzzy logic controller for the OH-FOFLC scheme was designed by considering the minimum rules to decrease the computational burden as well as to reduce the controller’s cost. Furthermore, a particle swarm optimization algorithm was implemented for optimizing the coefficients of the OH-FOFLC scheme. To illustrate the overall performance and effectiveness of the OH-FOFLC, four different controllers, including proportional–integral–derivative (PID), fractional order PID, sliding mode control, and optimal hybrid fuzzy logic control approaches, are considered. The validity of the suggested OH-FOFLC was demonstrated through numerical simulations and comprehensive comparative studies which demonstrated that the OH-FOFLC scheme performs better than the four other controllers under various operating conditions.
Keywords
Introduction
Over the past few years, extensive research and development have been conducted on the topic of torsional fluctuation in oil well drill-strings.1–3 These torsional vibrations cause a deterioration in the performance of the drill pipe. They can lead to premature failure of tools, motors, and other costly components used in the drilling process. The stick-slip phenomenon is regarded as one of the main causes of torsional vibrations. 4 This phenomenon is characterized by a sticking phase, where the bit’s angular velocity comes to a complete stop, and a slipping phase, where the angular velocity of the top drive of the drill-string increases up to six times its nominal value. Stick-slip fluctuations reduce the drilling efficiency, degrade the borehole quality, induce premature wear in the drill bit and they also decrease the penetration rate, which is a significant financial consideration for the drilling processes. 5 In this context, the purpose of this paper is to extenuate stick-slip oscillations by designing an effective control scheme that can overcome the above-mentioned problems. However, a precise mathematical model is mandatory for designing an effective controller for controlling drill-strings. As documented in the literature, numerous studies have modeled drill-strings with an emphasis on vibrations and control. The authors in Ref. 6 presented a detailed survey on the existing drilling models and categorized them into several categories, such as distributed parameter models, neutral-type time-delay models, coupled partial differential equations, ordinary differential equations and lumped-parameter models. In the latter category, a drill-string is considered to be a mass–spring–damper system that can be modeled simply by ordinary differential equations, thus simplifying the design and analysis of control systems. 6
This paper considers a lumped-parameter discontinuous torsional model with four degrees of freedom (DOF) that considers the dynamics of the drill pipe and the drill collars, and the nonlinear interactions of the drill bit and the rocks. Numerous studies in the literature have attempted to control and suppress stick-slip vibrations in drill-strings by various methods, such as proportional–integral–derivative (PID) controllers,7,8 fractional order (FO) PID controllers, 9 state feedback controllers, 10 H ∞ controllers, 11 nonlinear controller based on backstepping, 12 and conventional and high-order sliding modes.13–15 Nevertheless, these strategies have presented some problems because the designs were based on a complex model of the drill-strings or because of the simplification assumptions considered in the establishment of the control law. Conversely, intelligent controllers have the advantage of not requiring an accurate mathematical model system in their design process and they can handle the nonlinearities in complex systems.16–19
Compared with different intelligent controllers, robust fuzzy logic controllers (FLCs) have been simply implemented with great success in many industrial applications.20–22 FLCs with minimal knowledge of the mathematical model of the systems being controlled offer better performance in the presence of disturbances and uncertainties. Moreover, FLCs are currently easy to implement in real-time because of the development and potential of digital signal processors. Nowadays, FLCs have been enhanced by applying the FO domain.23,24 The key idea behind the FO domain is to integrate the convergence speed and accuracy of FO with the robustness of FLC. In this regard, the present study proposes an optimal hybrid fractional order fuzzy logic control (OH-FOFLC) scheme for suppressing the vibrations in oil well drill-strings. The goal of the study is to apply a new combined structure of the FO and the FLC schemes to make the drill-string system have a faster response with the desired steady-state precision and better robustness against variations in the operating conditions. To the authors’ knowledge, this is the first study that apply fuzzy control to a drill-string system. Furthermore, a particle swarm optimization (PSO) algorithm was deployed to obtain the optimal coefficients of the suggested OH-FOFLC. Comprehension comparative study validated the precise control and excellent performance of the suggested control scheme. The main contributions of this paper, in summary, are as follows: • Development of a new structure of an optimal hybrid fractional order fuzzy logic controller (OH-FOFLC) for oil well drill-strings. • The OH-FOFLC has a simple structure, minimal fuzzy rules, and easy implementation. • The OH-FOFLC coefficients are optimally obtained via a PSO process. • In comparison with other control approaches, such as PID, fractional order PID (FO-PID), SMC (sliding mode control), and optimal hybrid fuzzy logic control (OH-FLC), the proposed OH-FOFLC offers superior performance.
The rest of the paper is structured as follows: The lumped-parameter model of the drill-string is presented in the Dynamic modeling of drill-string system section. The Structure of the suggested control scheme section gives the details of the suggested control scheme. The results and discussion are presented in the Results and discussion section. The Conclusion section concludes the paper.
Dynamic modeling of drill-string system
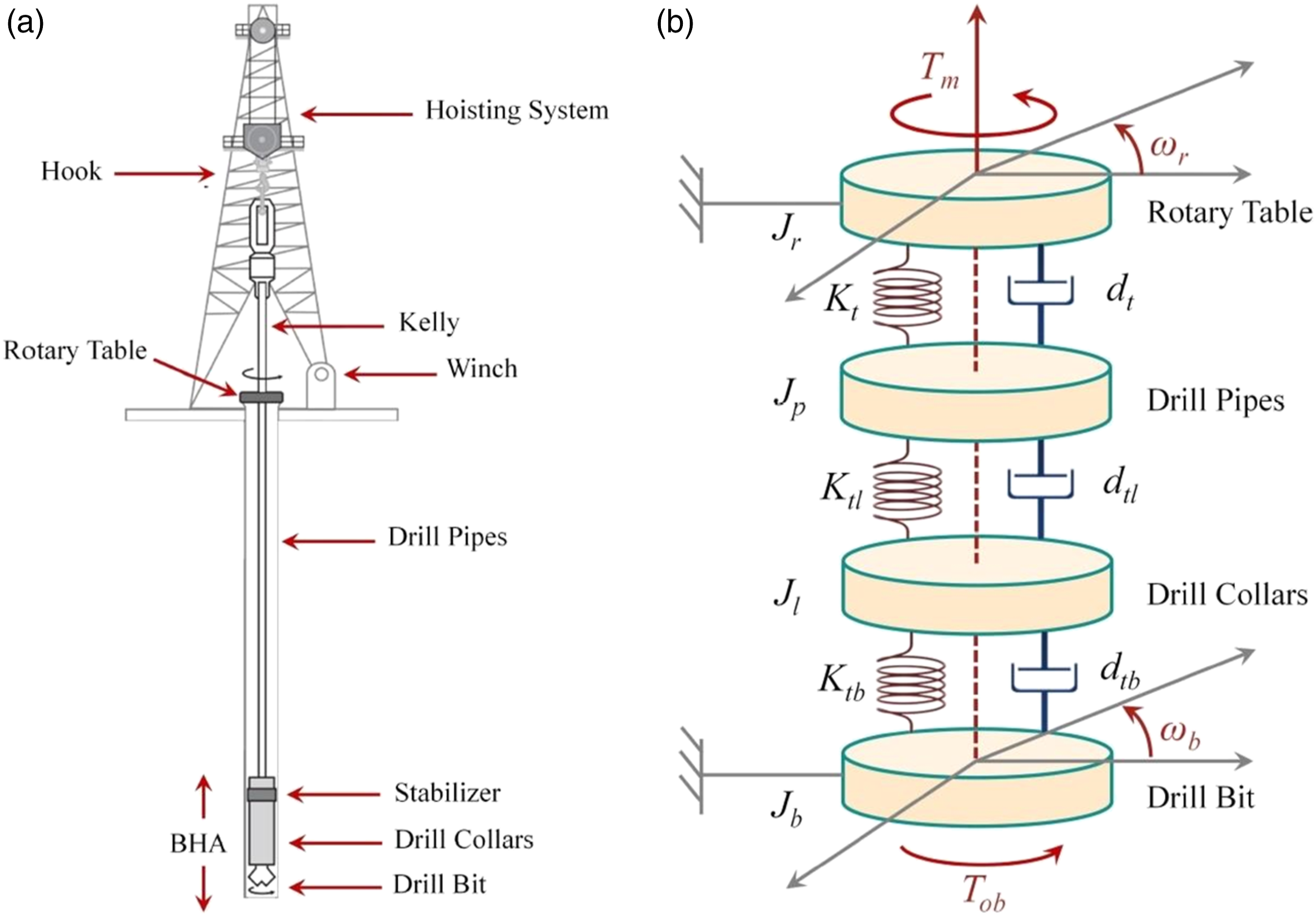
A schematic of the drill-string system with its equivalent mechanical representations based on four DOF is displayed in Figure 1. It consists of four damped inertias represented by four disks. The rotational inertias are connected together by shafts with dampers d
t
, d
tl
, d
tb
in addition to the torsional springs k
t
, k
tl
, k
tb
.14,15 An arrangement of disks, which are equivalent to the rotary table on the top (r), the drill pipe (p), the drill collars (l), and the drill bit (b), forms the lumped-parameters model. The rotary table is characterized by a bulky damped inertia to inhibit speedy deviations in angular velocity and is guided by an electric motor with torque T
m
applied through a gearbox. With a series of interconnected drill pipes, the length of a drill-string can reach up to many kilometers. The drill pipes are made from metallic tubes. The bottom section, known as the bottom hole assembly, is manufactured from a weightier pipe. The drill bit is submerged in fluid mud, which dissipates the drill bit’s energy and strong torque imposed on the bit. The drill bit is also subjected to a friction torque T
fb
that represents the bit–rock interaction. The drilling system’s geometric and material characteristics are indicated in Figure 1(b). The rotary table is assumed to be fixed, but the bit is free.
13
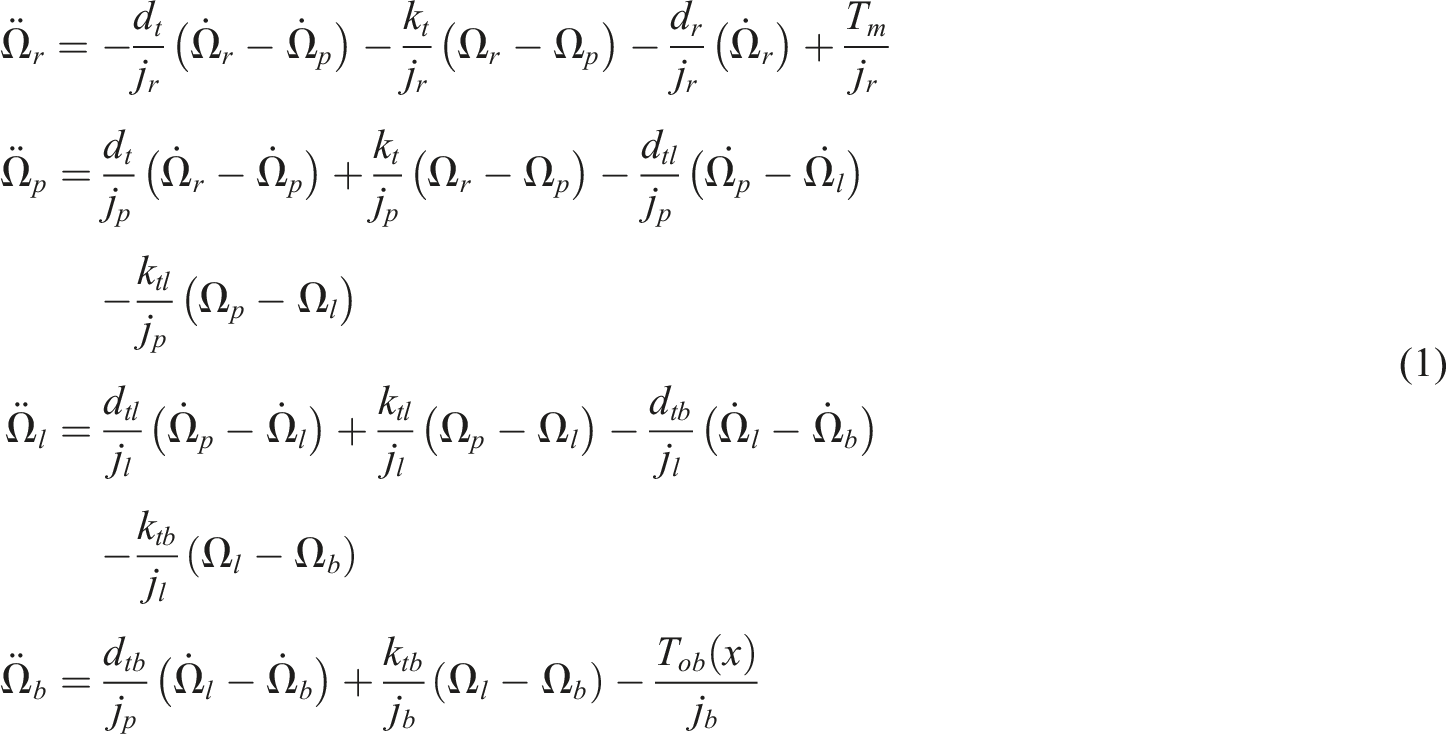
Based on the above mentioned characteristics of a drill-string, a state-space representation of the dynamic behavior of the drill-string system is detailed in (1), where the state vector of the drill-string system is defined in (2).
13
Mechanical system describing the torsional action of a traditional drill-string.
15

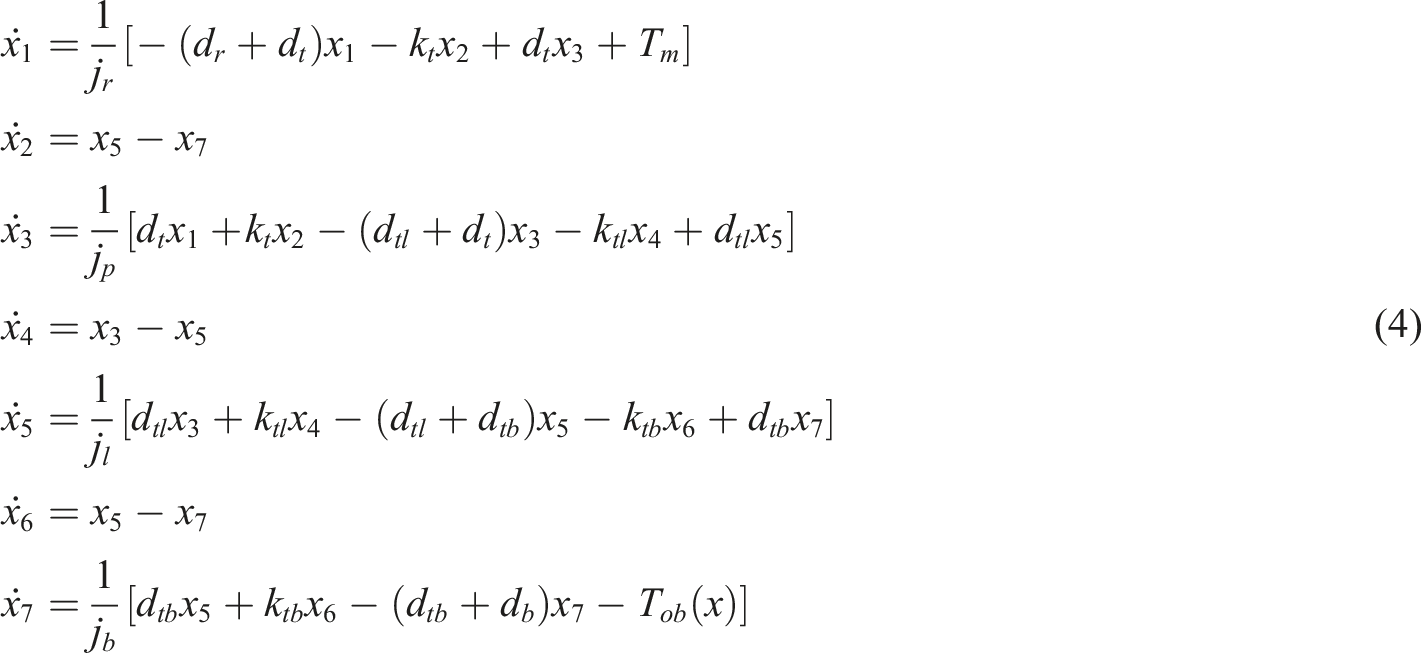
For the sake of simplicity, (2) is defined as follows:

Finally, the state equations of the drill-string system are given in (4), using the simplified representation of (3) to facilitate the analysis.
Torque on the bit is given by the following equation


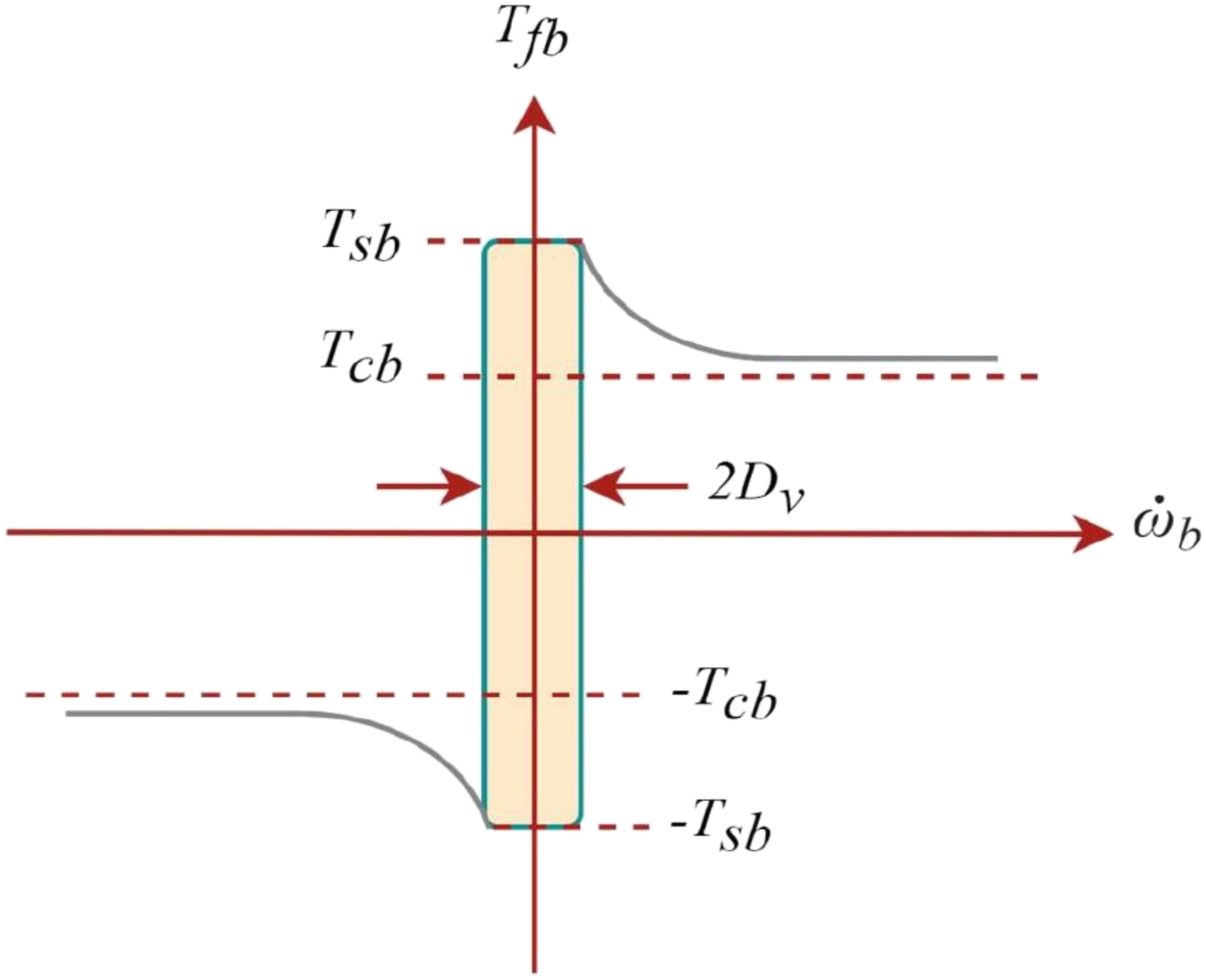
The energy supplied by the motor at the top surface is mostly dispersed at the drill bit through bit–rock interaction. The friction between the bit and the rock is the leading cause of fluctuations in a drill-string. Hence, it is essential for a detailed study on the fluctuation mechanism to develop a bit–rock interaction model. In the literature, different friction models are proposed. The most frequently used models over recent years are the Stribeck model and Karnopp’s model Krama et al.
13
The problems with the Stribeck model are the instability issue and discontinuity at zero speed. The static features of friction cannot be precisely estimated. To solve the above mentioned difficulties, bit–rock interaction has been modeled by Karnopp’s model, considering both frictional and cutting contact, as displayed in Figure 2 Krama et al.
13
The reaction torque can be calculated through the mathematical model given by (7). Karnopp’s model for bit-rock interaction.
13





The lumped-parameters model of the drill-string can be written in a multivariable form as Krama et al.
13

Structure of the suggested control scheme
Recently, intelligent industrial systems have been extensively developed, incorporating FLC and FO control approaches. Control systems based on fuzzy logic are extremely appropriate for designing and controlling complex systems for which a mathematical model cannot be achieved simply. In particular, the fuzzy controller is very suitable for nonlinear systems. On the other hand, the FO control scheme leads to a better suited and faster controller response. The specific structure of the OH-FOFLC scheme is illustrated in Figure 3. Structure of the suggested optimal hybrid fractional order fuzzy logic control scheme.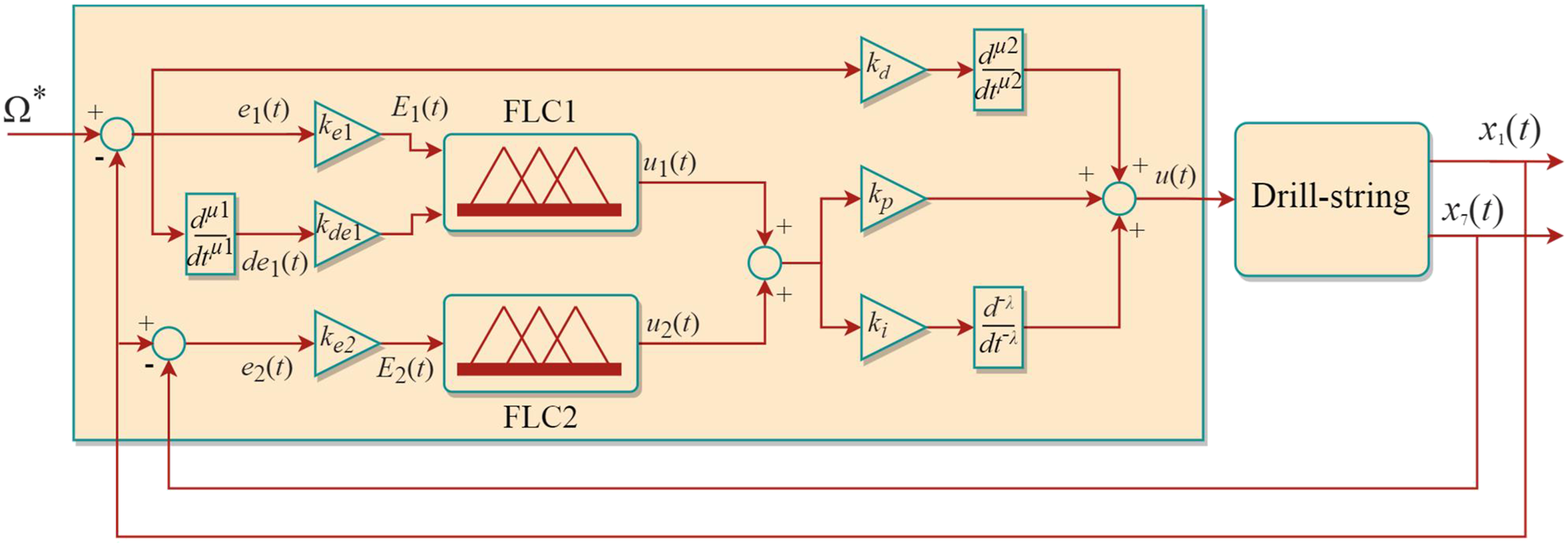
Hybridization of fuzzy logic and fractional order control
In the structure shown in Figure 3, two FLCs combined with FO operators are applied; the first (FLC1) aims to drive the angular velocities of the rotary table and the drill bit to a required value fast enough to evade the bit sticking fluctuations, whereas the second (FLC2) is designed to improve the tracking error between the angular velocities. In Figure 3, FLC1 uses two input variables, that is, the error e1(t) and the fractional derivative of the error de1(t) and one output variable, that is, u1(t). Here, ke1 and kde1 are used as normalized scaling coefficients to normalize the inputs e1(t) and de1(t) to the universe of discourse in which the membership functions (MFs) of the inputs are defined. Accordingly, the inputs e1(t) and de1(t) are transformed to E1(t) and dE1(t), respectively, as follows

Ω*(t) is the angular velocity reference and μ1 denotes the FO derivative value for computing de1(t). On the other hand, FLC2 uses one input variable, that is, error e2(t) and one output variable, that is, u2(t). Moreover, one normalized scaling coefficient ke2 is used to normalize e2(t) and transform it to E2(t) as follows:

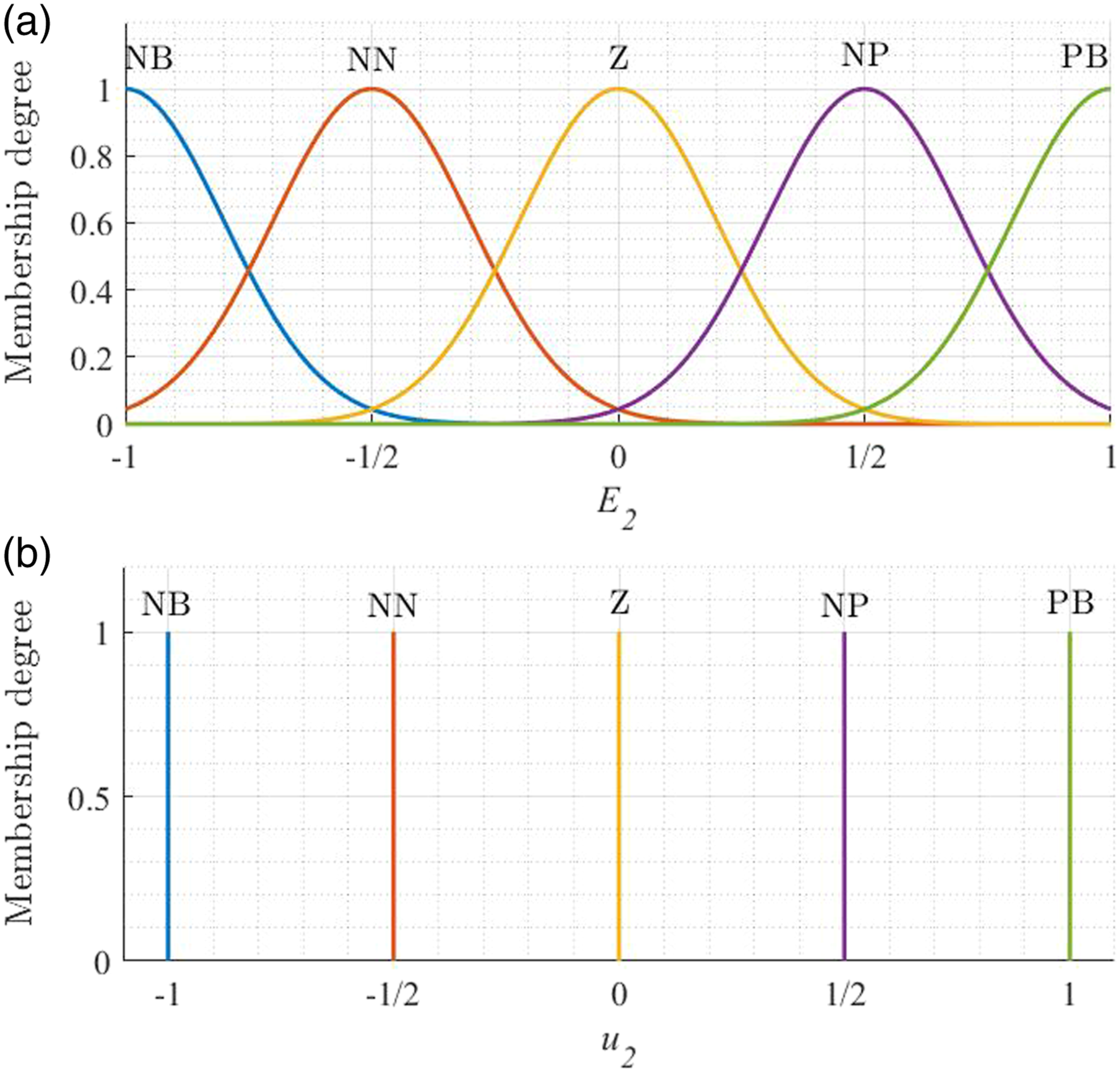
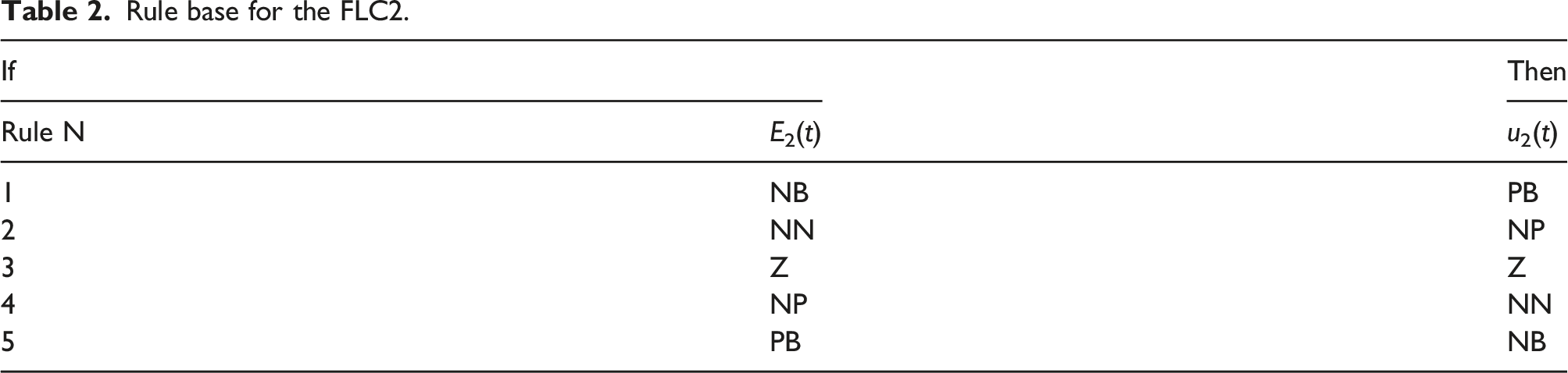
In line with Figure 4, the output u(t) of the OH-FOFLC is computed as Membership functions of the input and output variables for the FLC1. Membership functions of the input and output variables for the FLC2.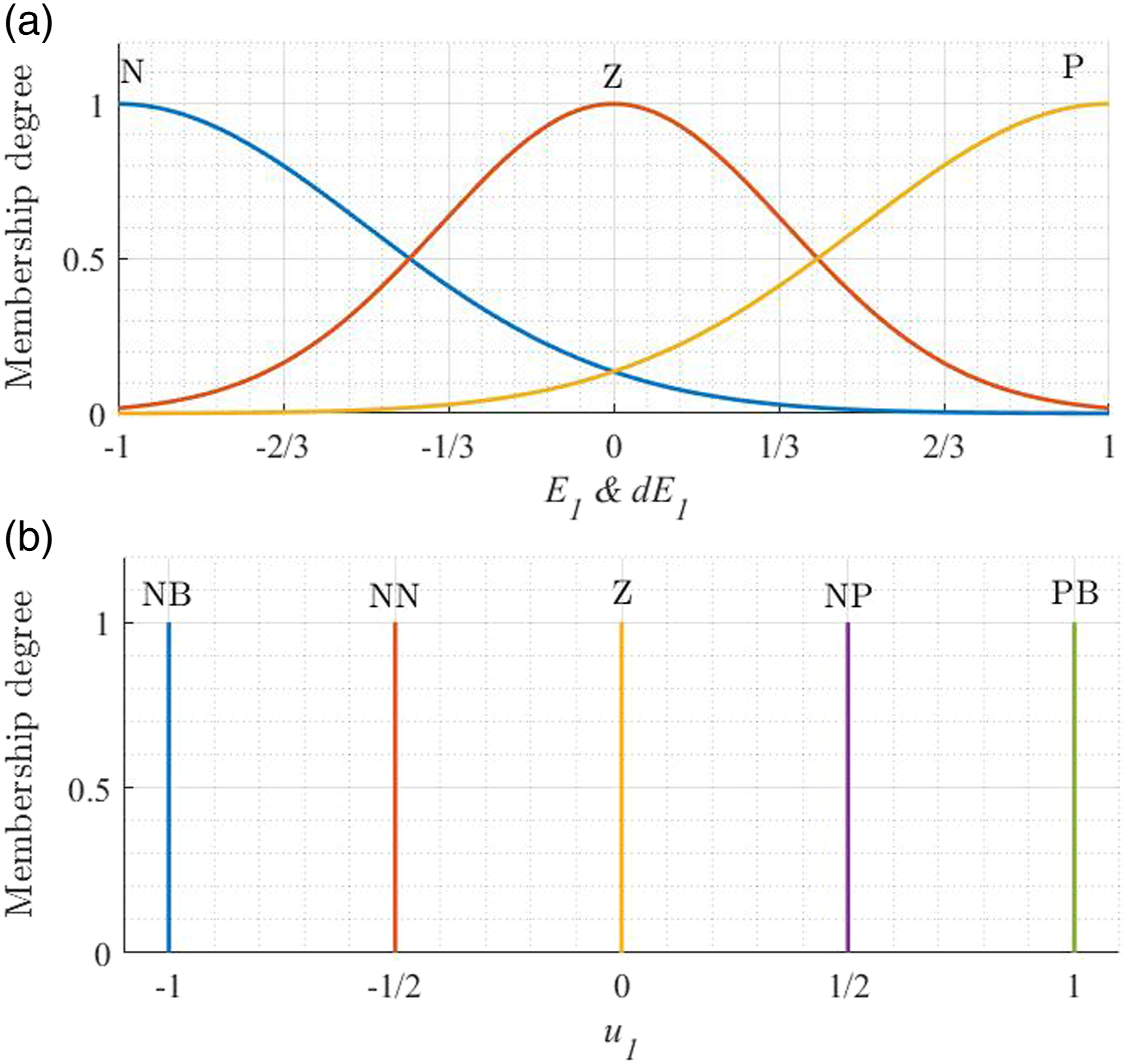

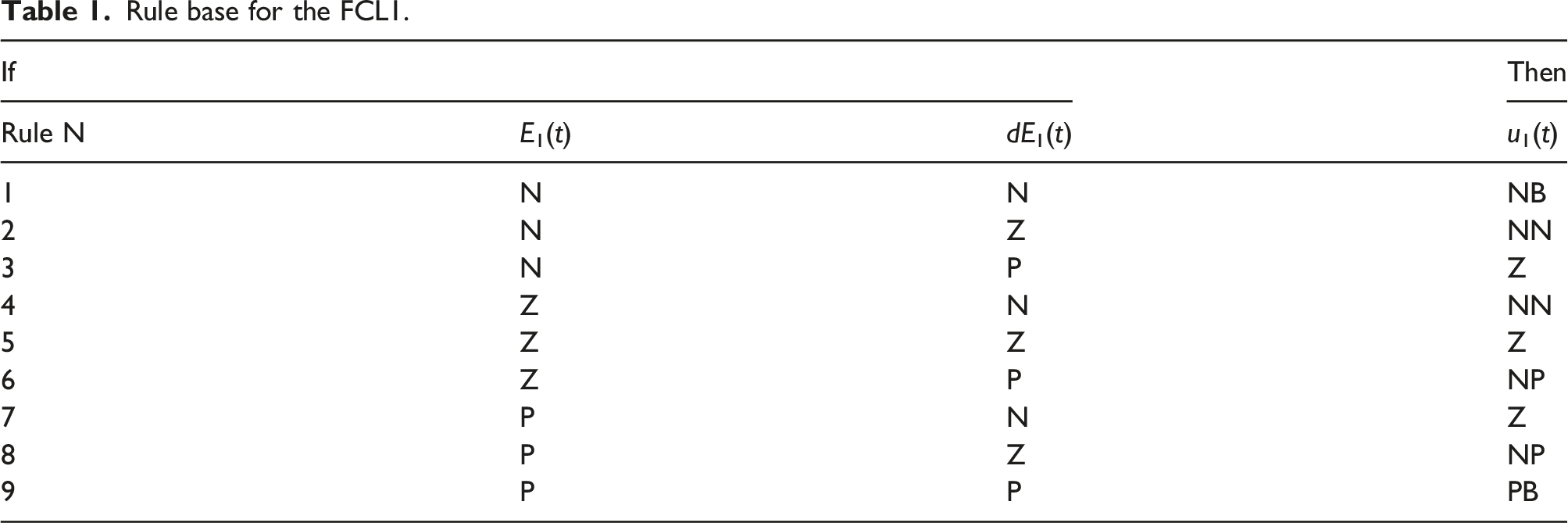
Rule base for the FCL1.
Rule base for the FLC2.
For the application of the suggested OH-FOFLC, Oustaloup’s approach was used to estimate the parameters of the control scheme.
25
Using a recursive filter, this approach provides a very good fit to the FO parameters within an operating frequency range of [ω
l
ω
h
]. The approximation of the FO parameter s
α
is expressed as follows:

Coefficients tuning using PSO algorithm
The coefficient tuning process for the suggested control scheme was considered to be an optimization problem, in which the scalar coefficients of the FLCs (k
e
1, kde1, ke2, k
p
, k
i
and k
d
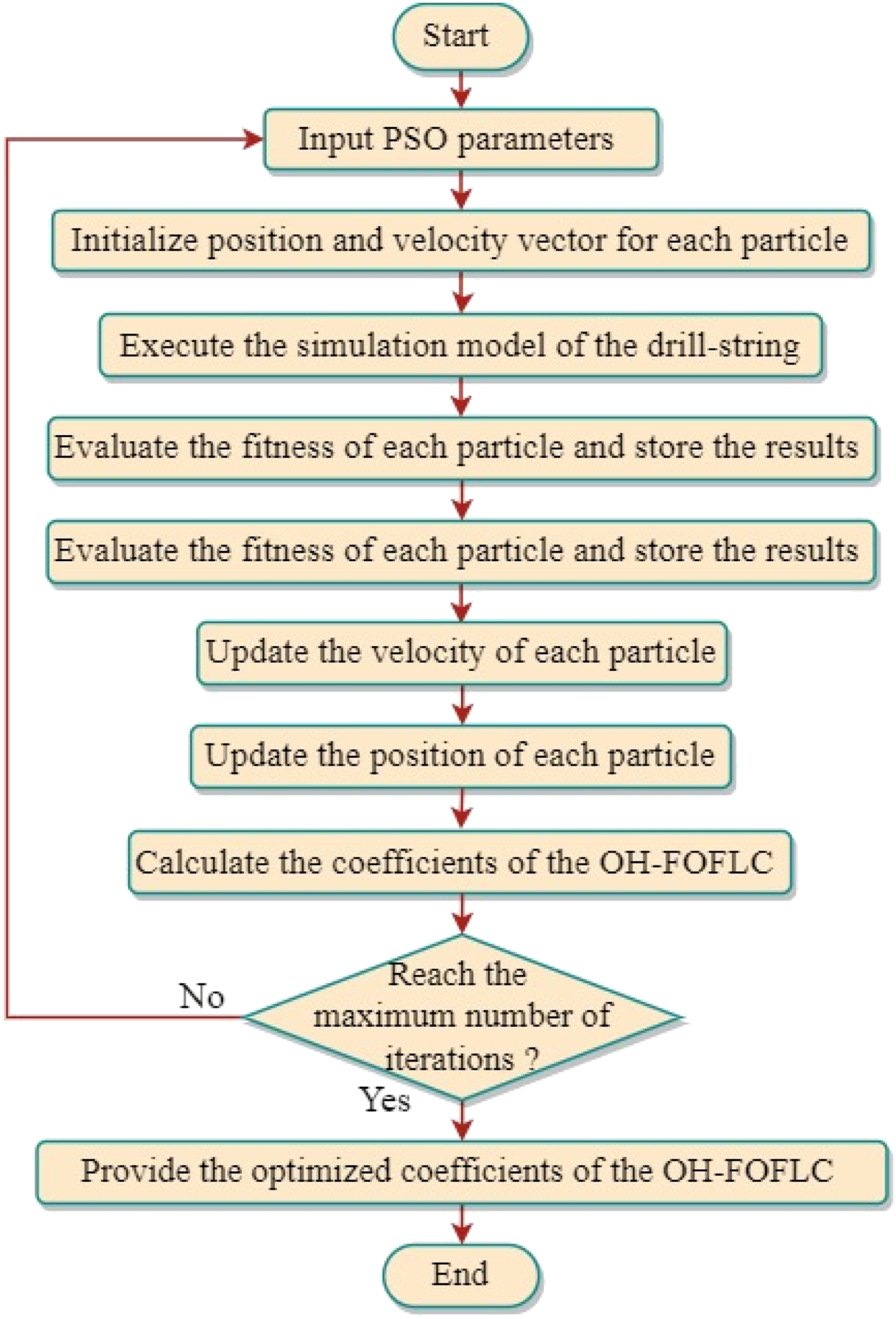
) and the FOs (μ1 μ2 and λ) were seen as decision variables. In this context, the PSO algorithm was deployed for solving the optimization problem, which is expressed as an objective function to minimize its fitness.26,27 The objective function J was based on the angular velocity errors and the control torque signals as follows: Flowchart of the particle swarm optimization process. Key parameters of the PSO algorithm.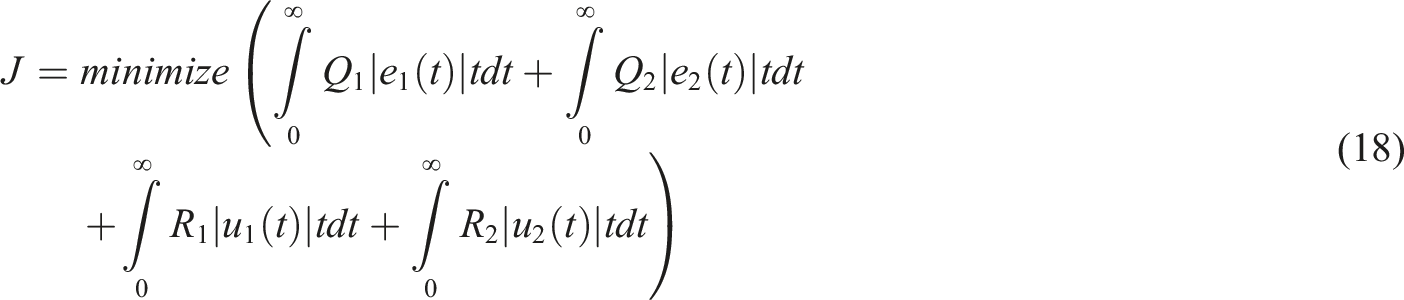

Results and discussion
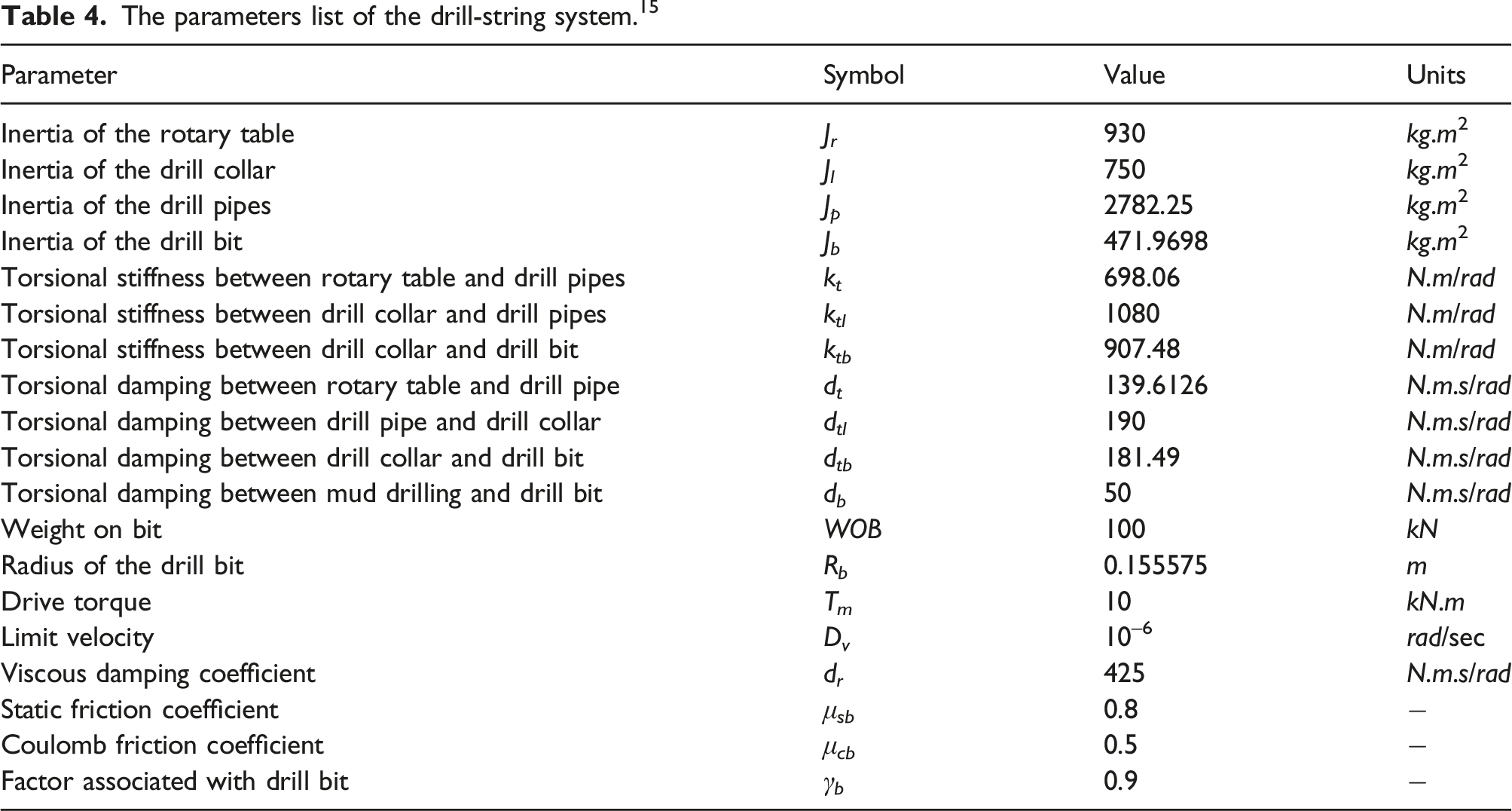
The parameters list of the drill-string system. 15
The optimal coefficients for the OH-FLC and OH-FOFLC.

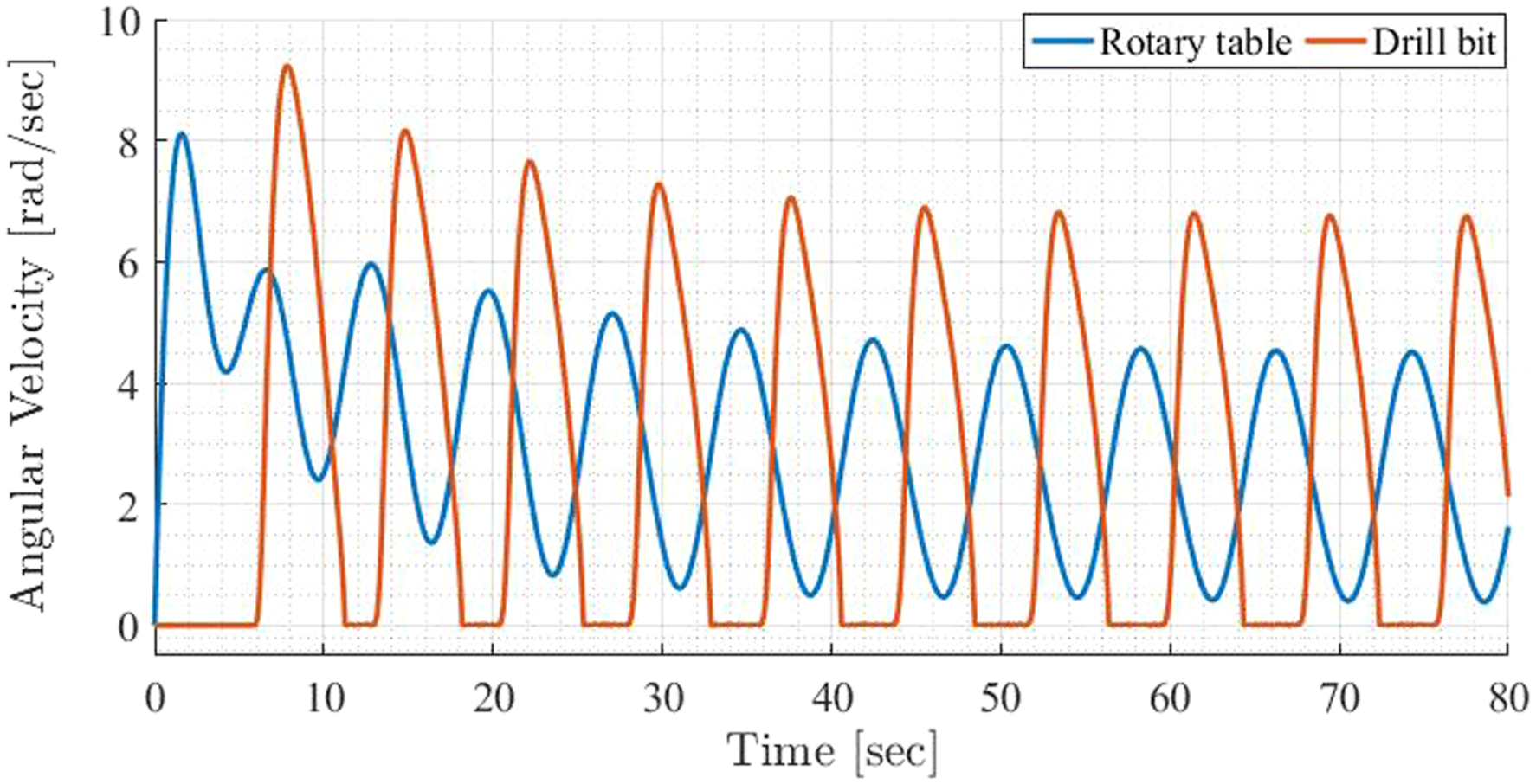
The stick-slip vibrations in the drill-string system.
Performance verification of the suggested OH-FOFLC
To study the performance of the OH-FOFLC and its ability to stabilize the stick-slip phenomenon of a drill-string, the first simulation was carried out with a fixed WOB of 100 kN and constant angular reference velocity Ω* = 12 rad/sec. Figure 8 displays the transient behavior of the angular velocities of the rotary table and the drill bit, and the torque control in the case of a sudden change from an open-loop drill-sting (with a fixed control torque of 10 kNm) to a drill-string controlled by the OH-FOFLC. It can be seen that the stick-slip vibrations are eliminated once the OH-FOFLC is put into operation at t = 40 s, and the angular velocity of the drill bit and that of the rotary table are stabilized to the desired angular velocity after a short period. Also, the control torque was increased with smooth waveform which is desirable for suppressing stick-slip vibrations. Stabilization of the drill-string using the suggested optimal hybrid fractional order fuzzy logic control for Ω* = 12 rad/sec and weight on bit = 100 kN: (a) angular velocities of the rotary table and the drill bit, (b) control torque. The OH-FOFC is switched on after 40 s.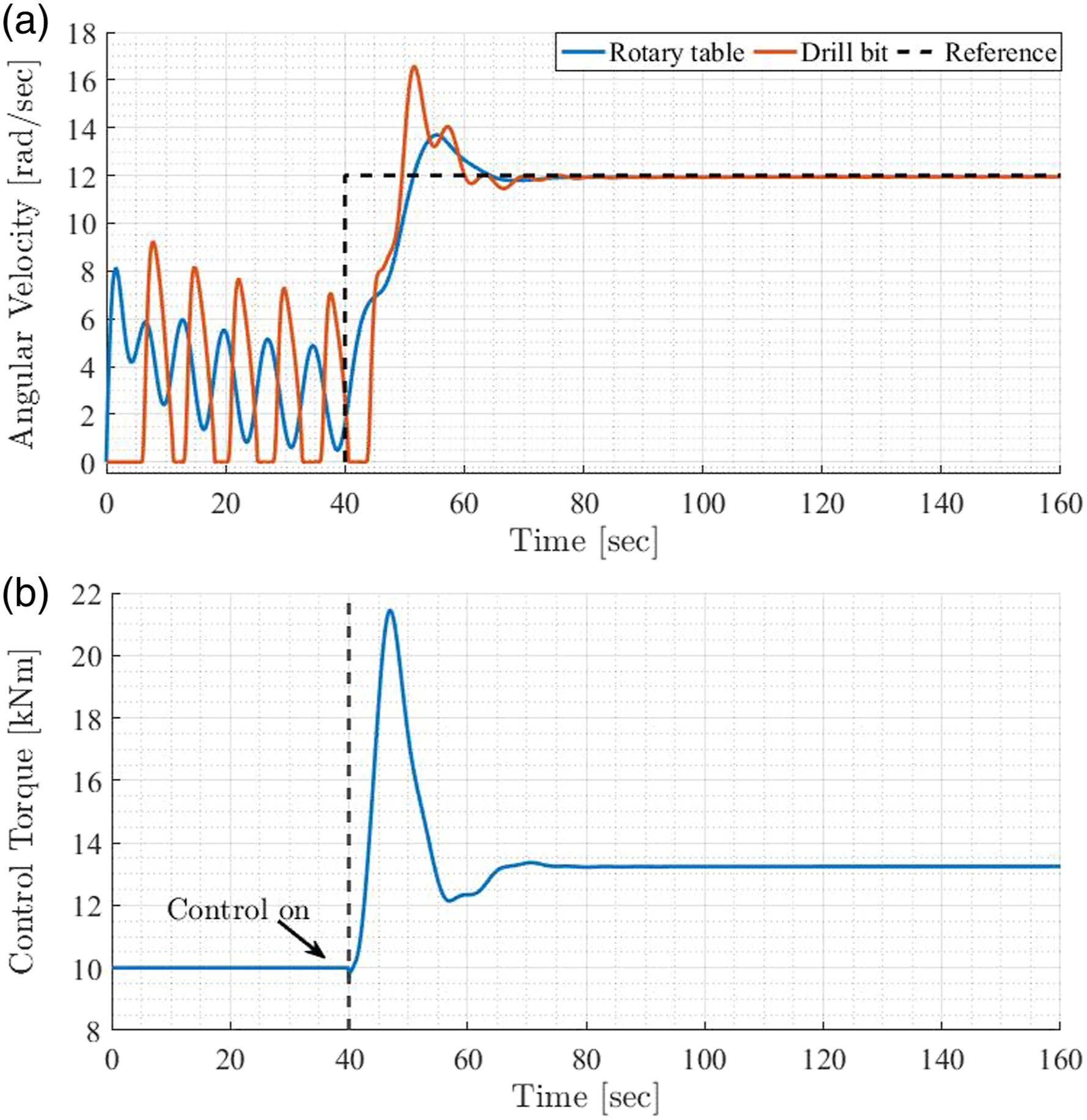
The second simulation was performed to assess the step change response of the OH-FOFLC scheme. The angular velocity reference increased from 12 to 16 rad/s in this test(see Figure 9) under a fixed WOB. It can be observed that the angular velocity of both the rotary table and the drill bit was maintained close to the new reference after a short period, with good approximation and stability, and the control torque was increased once the angular velocities had increased to guarantee adequate torque for the bit. Performance of the suggested optimal hybrid fractional order fuzzy logic control in the presence of abruptly change of Ω* from 12 to 16 rad/sec and weight on bit = 100 kN: (a) angular velocities of the rotary table and the drill bit, (b) control torque.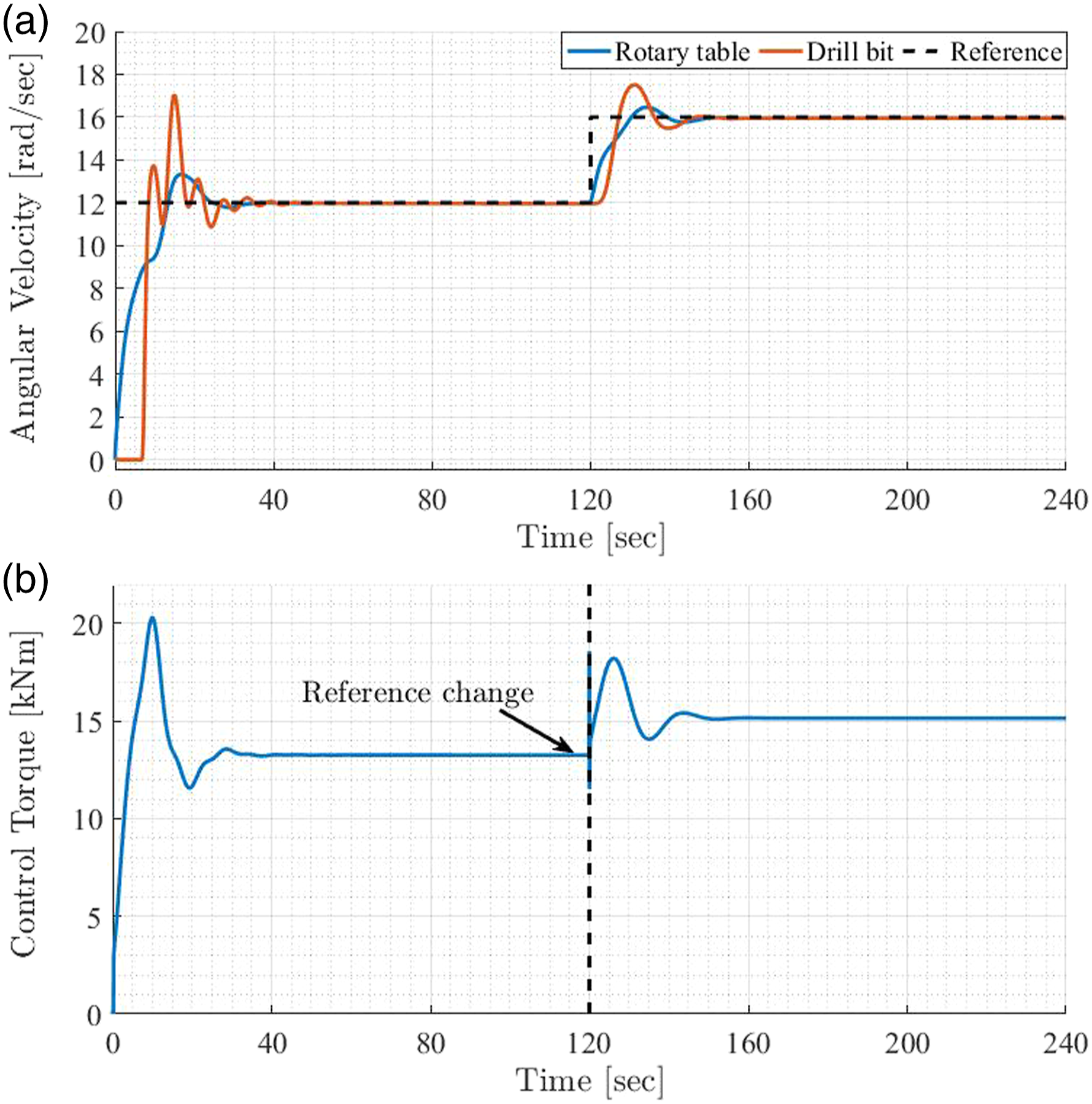
Next, to evaluate the anti-disturbance performance of the OH-FOFLC scheme, the simulation of an abrupt change in WOB under a fixed angular reference velocity was carried out. The WOB was decreased abruptly in this test from 100 to 70 kN at t = 160 s. It can be clearly seen from the simulation results in Figure 10 that the control torque decreased when the WOB decreased and the transient behavior of the OH-FOFLC is fast with small variations in the angular velocities of the rotary table and the drill bit. Performance of the suggested optimal hybrid fractional order fuzzy logic control in the presence of abruptly change of weight on bit from 100 to 70 kN and Ω* = 12 rad/sec: (a) angular velocities of the rotary table and the drill bit, (b) control torque.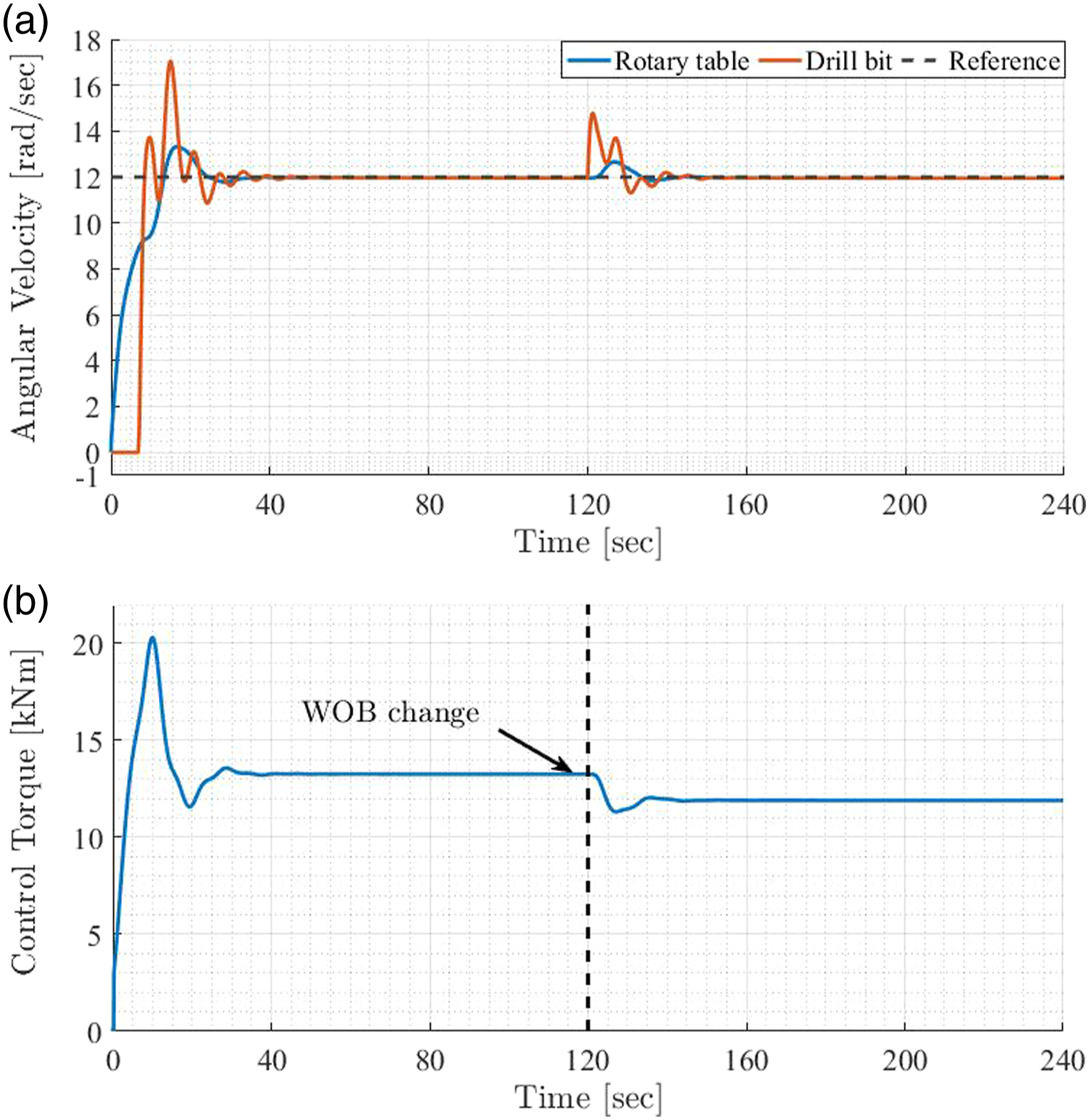
In addition, the control torque decreased because of the change in the WOB.
Furthermore, in order to verify the robustness of the OH-FOFLC against parameter uncertainties, a simulation is performed with changes in the drill-string parameters under a constant angular reference velocity and a fixed WOB. The parameter uncertainties comprised alterations of k
t
, d
tb
, μ
sb
, μ
cb
from the nominal values. The values of these parameters were increased by 50% from the nominal values. Figure 11 shows that the OH-FOFLC maintained good performance and stability regardless of these changes, which proves the robustness of the suggested control scheme. Robustness of the suggested optimal hybrid fractional order fuzzy logic control in the presence of parameter uncertainties, Ω* = 12 rad/sec and weight on bit =100 kN: (a) angular velocities of the rotary table and the drill bit, (b) control torque.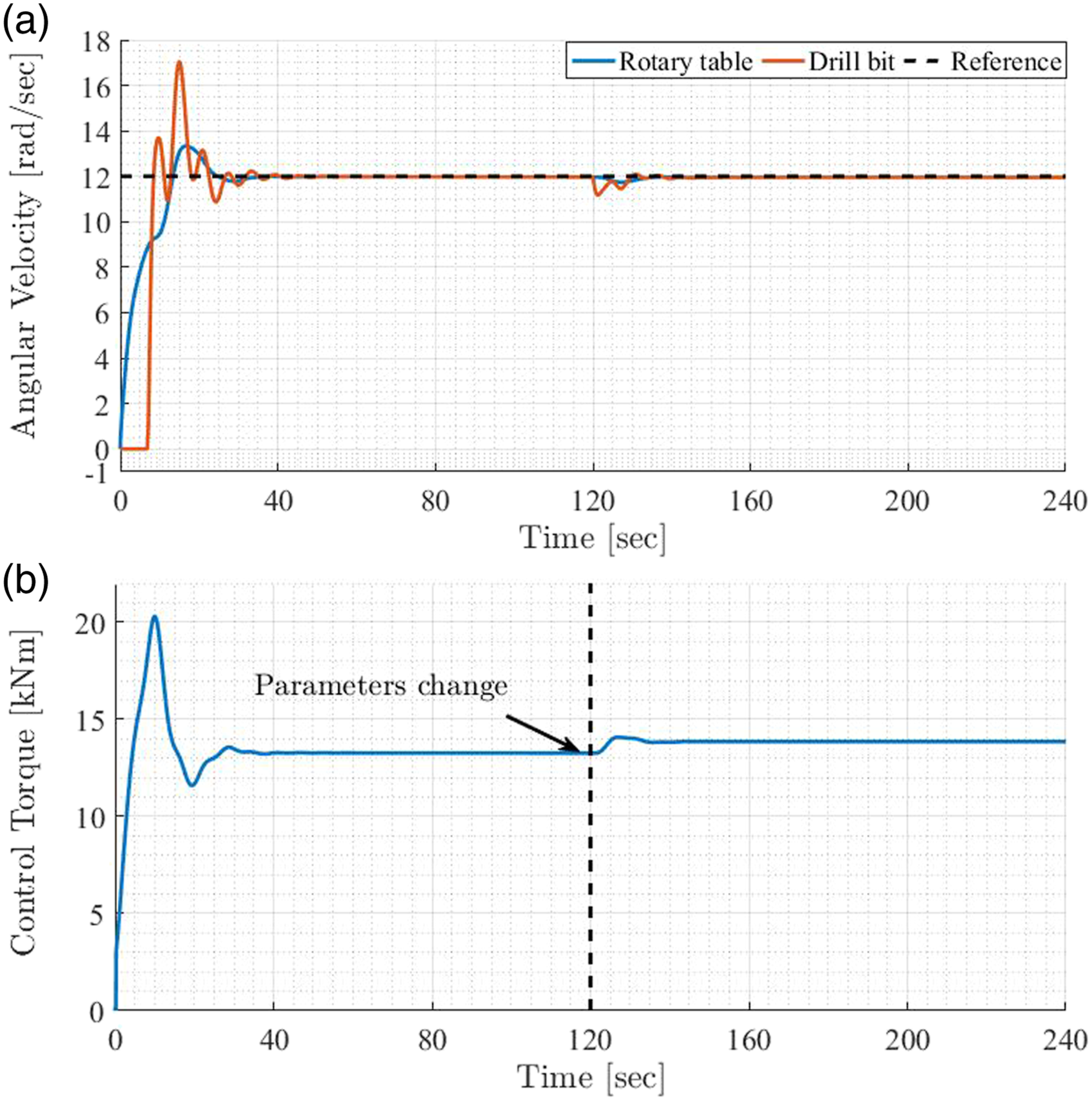
Performance comparison with different controllers
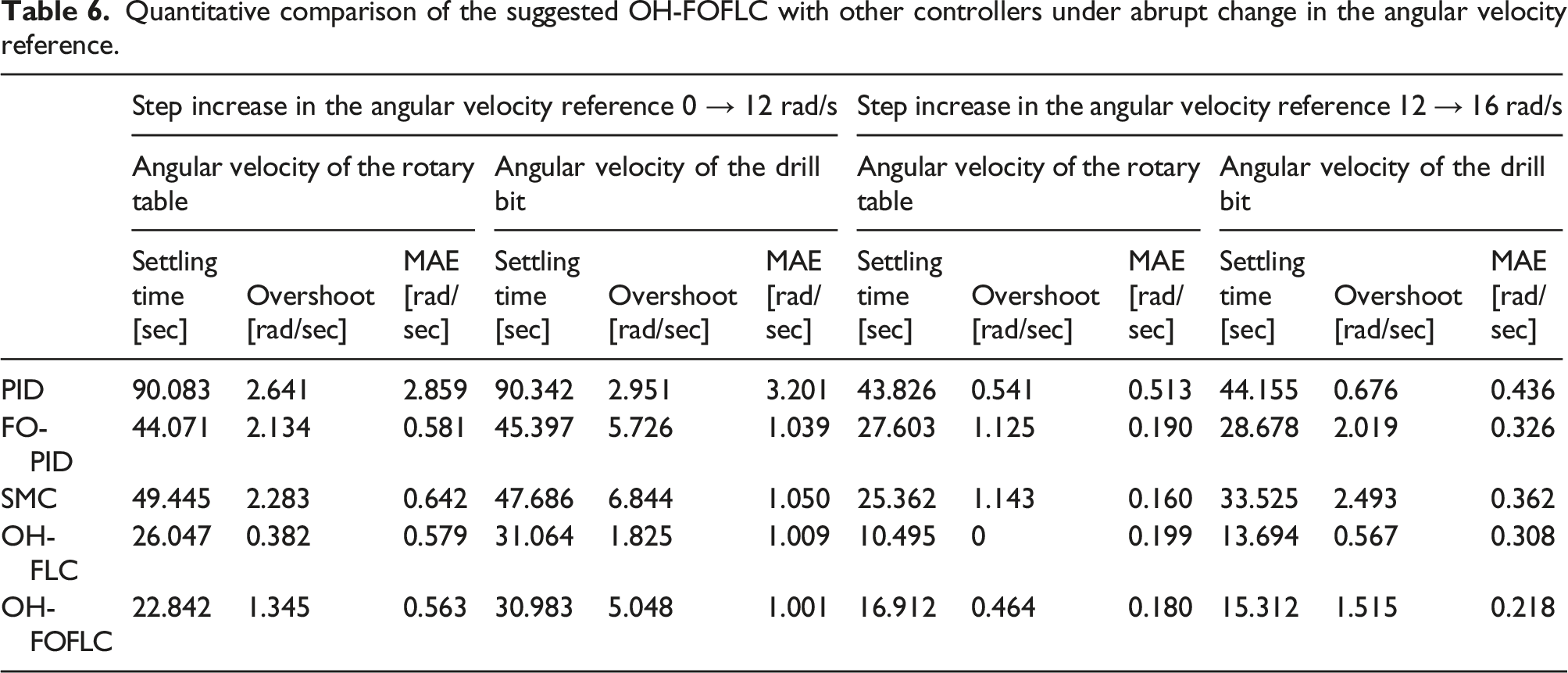
In this section, the suggested OH-FOFLC scheme is compared with some other controllers, namely, the PID controller, the FO-PID controller, the SMC controller and the OH-FLC in the drill-string system. These controllers were compared in terms of the settling time, the peak overshot/undershoot and the mean absolute errors (MAE) under various operating scenarios (as in the previous subsection) through numerical simulations. First, a comparison of the different controllers under step changes in the angular reference velocity is shown in Figure 12. The step response characteristics of the different controllers recorded in Table 6 demonstrated that the different controllers achieved good tracking performance in the steady state; it is evident that the variations of the MAE were lower with the OH-FOFLC as compared to the other controllers for the angular velocity of both the rotary table and the drill bit. On the other hand, in the transient state, the angular velocity of both the rotary table and the drill bit had a shorter settling time and a smaller overshoot for both reference velocity steps with the OH-FOFLC. Performance comparison of the different controllers in the presence of abruptly change of weight on bit from 100 to 70 kN and Ω* = 12 rad/sec: (a) angular velocities of the rotary table, (b) angular velocities of the drill bit. Quantitative comparison of the suggested OH-FOFLC with other controllers under abrupt change in the angular velocity reference.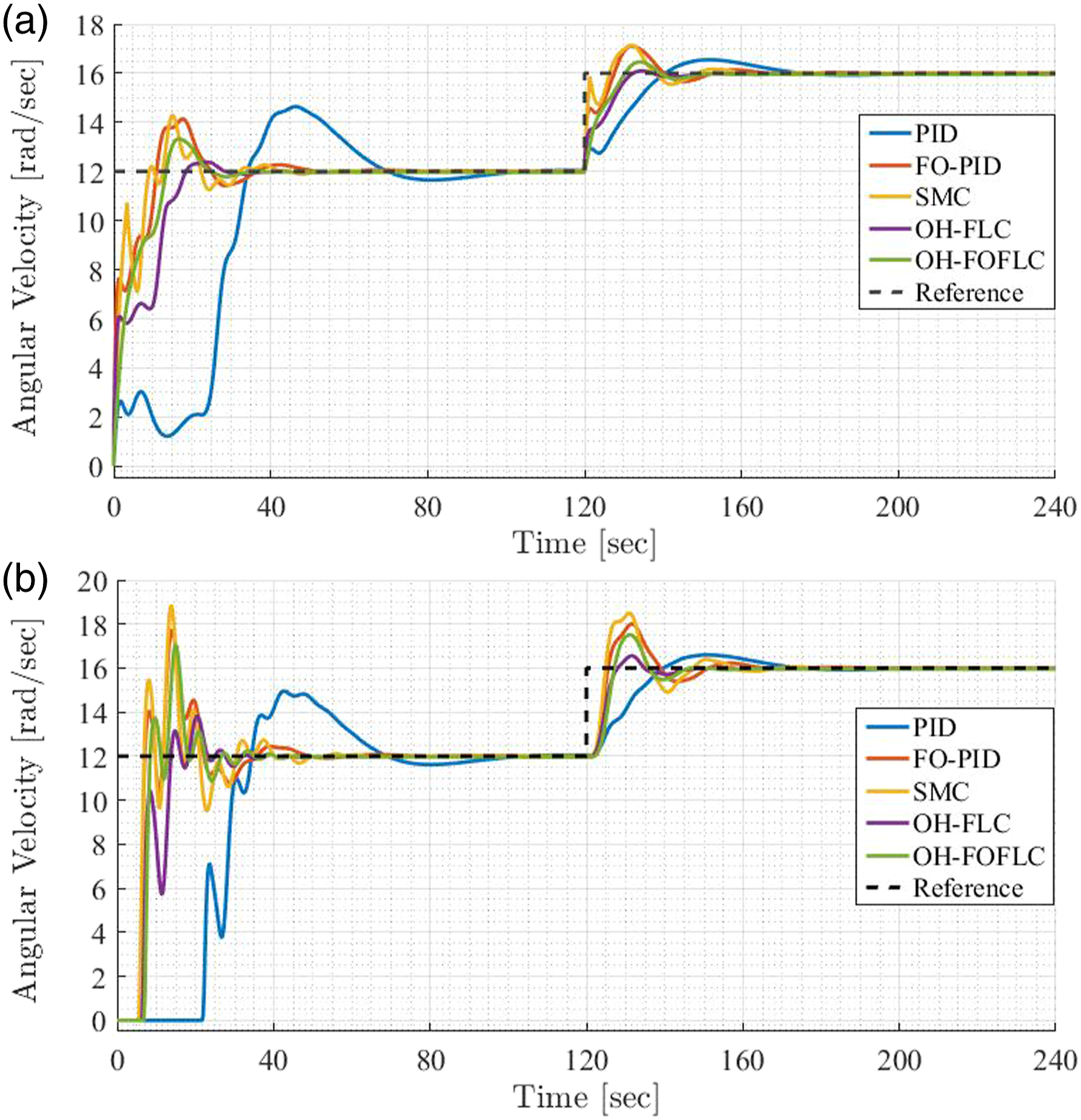
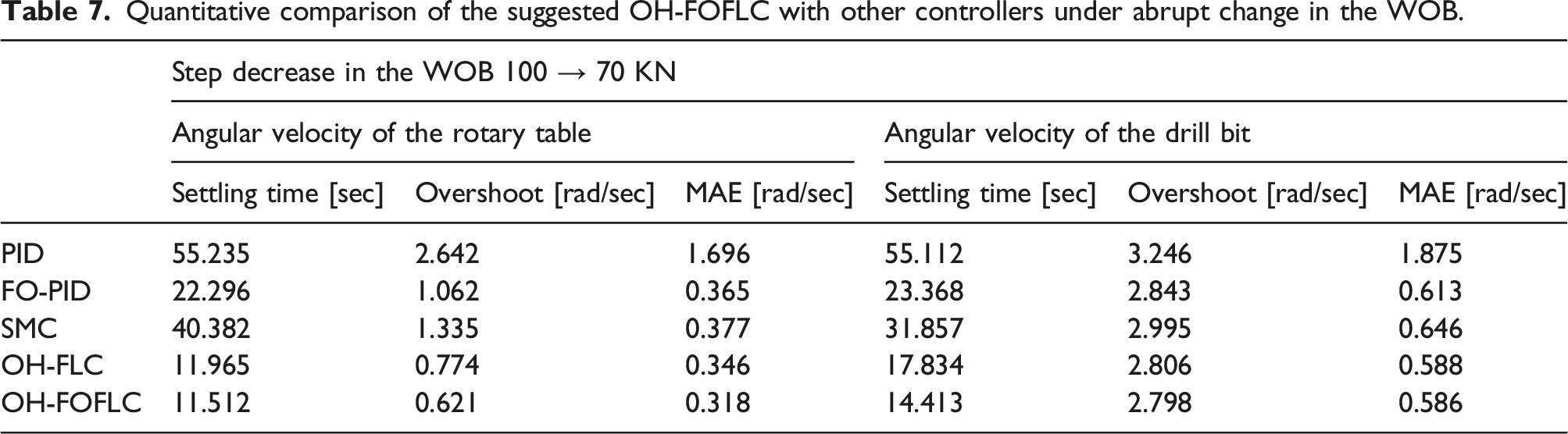
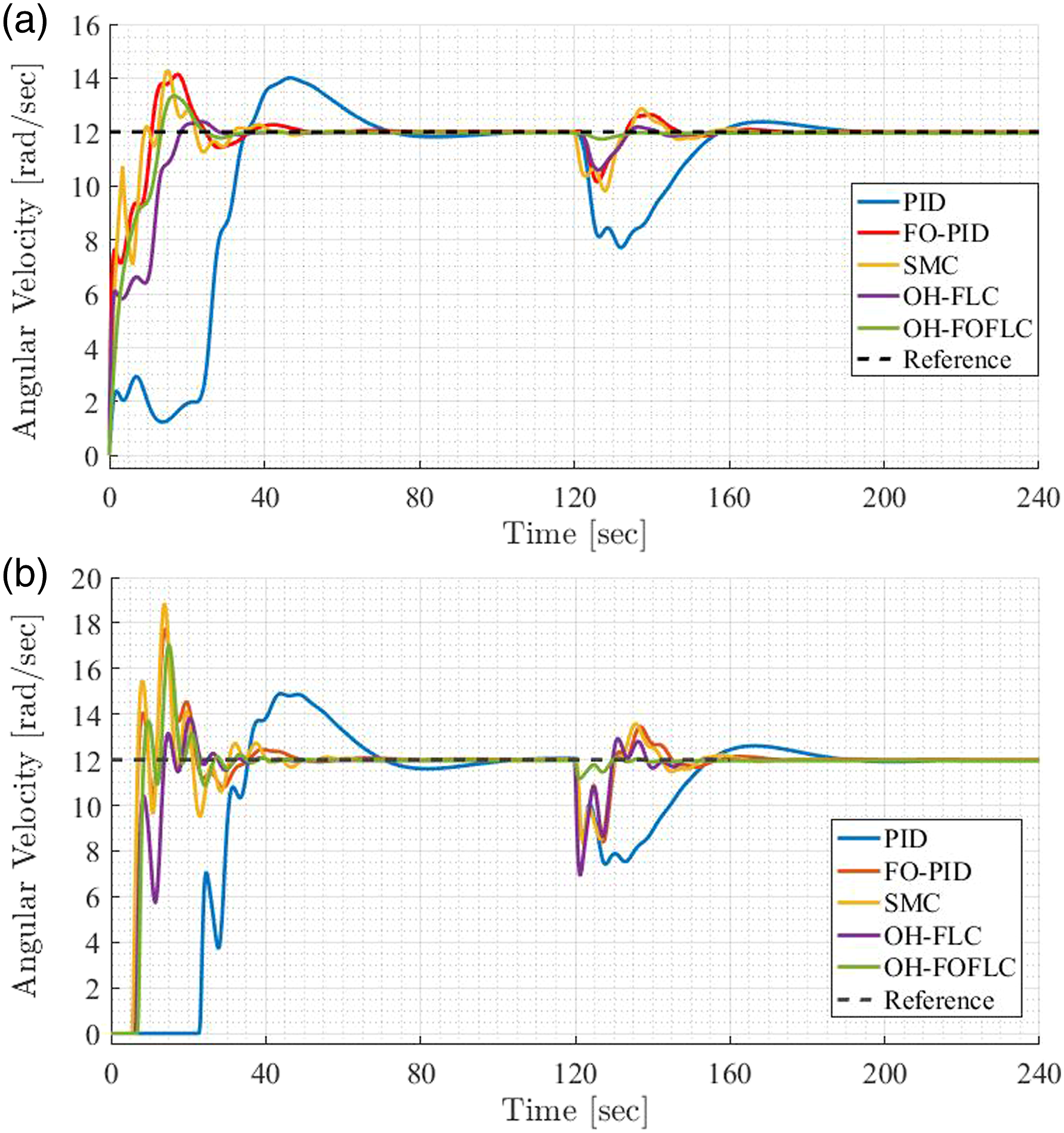
Next, the five controllers were tested and compared under an abrupt change in WOB. It can be seen in simulation results exhibited in Figure 13 and Table 7 that the angular velocity responses of the five controllers became stable again after short transient. Nevertheless, the variations in the angular velocity with the OH-FOLC were faster and smaller with minimum MAE than those of the other controllers, which demonstrates that the OH-FOLC scheme has a better anti-disturbance ability than the other controllers. Performance comparison of the different controllers in the presence of abruptly change of Ω* from 12 to 16 rad/sec and weight on bit = 100 kN: (a) angular velocities of the rotary table, (b) angular velocities of the drill bit. Quantitative comparison of the suggested OH-FOFLC with other controllers under abrupt change in the WOB. Robustness comparison of the different controllers in the presence of parameter uncertainties, Ω* = 12 rad/sec and weight on bit = 100 kN: (a) angular velocities of the rotary table, (b) angular velocities of the drill bit. Quantitative comparison of the suggested OH-FOFLC with other controllers under parameter uncertainties.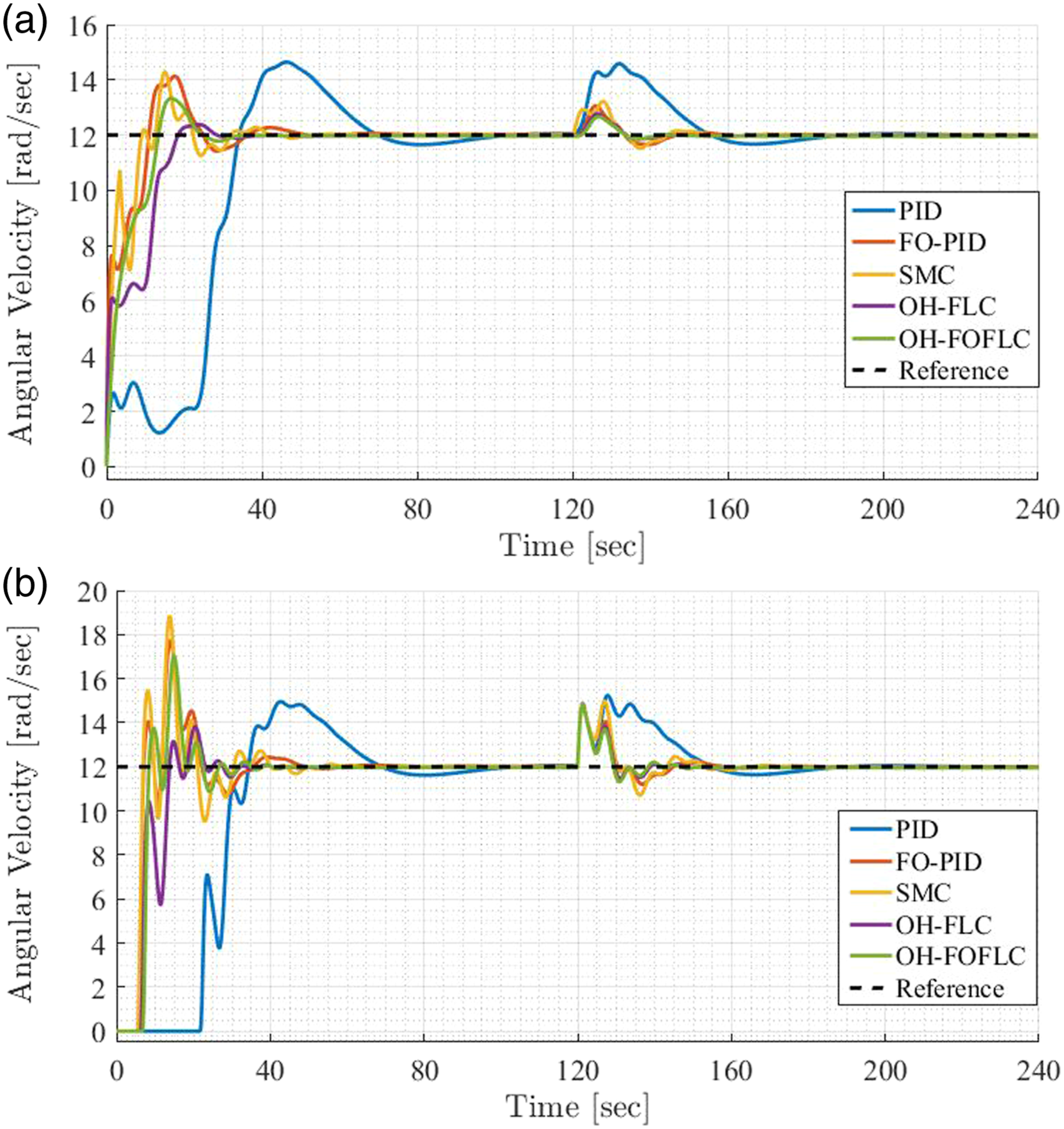
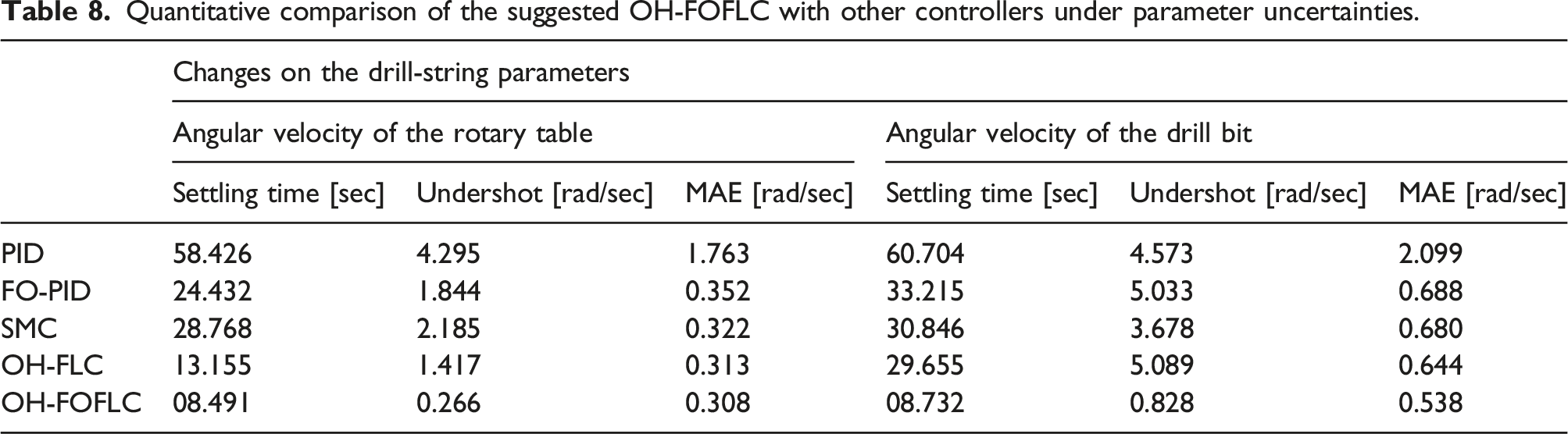
In addition, a comparison of the robustness of the different controllers to parametric uncertainty is investigated in Figure 14 and Table 8. The superior transient performance of the suggested OH-FOFLC compared with the other controllers can be clearly seen. Moreover, the OH-FOFLC had less MAE than the other controllers.
Conclusion
In order to avoid stick-slip fluctuations in an oil well drill-string and ensure good tracking performance for the angular velocity under various operating scenarios, this paper has suggested a novel structure for an OH-FOFLC scheme. Our control scheme uses the properties of fuzzy logic control and fractional order calculus to realize effective and robust velocity tracking control and fluctuation suppression. The coefficients of the suggested OH-FOFLC are also enhanced by deploying a PSO algorithm. Several simulations and comparisons were carried out. It can be concluded from the results and comparisons that the suggested control scheme is efficient for suppressing the stick-slip vibration in drill-strings, as it offered better tracking performance than the PID, FO-PID, SMC and OH-FLC controllers under various operating scenarios.
For future work, we envisage that the suggested controller can be implemented in real time for a drill-string prototype. We will also investigate the observer-based fault detection and isolation problem for the drilling systems with advanced techniques.28,29
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This publication was made possible by NPRP grant [NPRP10-0101-170081] from the Qatar National Research Fund (a member of Qatar Foundation).