
Abstract
In order to enhance the anti-interference ability of the speed to external load and achieve the rapid response control for turboshaft engine of next-generation helicopters, an incremental nonlinear dynamic inverse (INDI) control method for turboshaft engine based on Jacobi matrix is proposed. First, the control law of turboshaft engine based on state variable model (SVM) is obtained according to the mathematical derivation of INDI. Then, based on adopting Jacobi matrix and sequential quadratic programming (SQP) algorithm, the SVM is online obtained, so as to express the steady and dynamic characteristics of turboshaft engines under different flight conditions precisely. Finally, several numerical simulations are conducted to validate the control effect of INDI control method. The results demonstrate that compared with cascade PID controller, INDI control method based on single SVM can significantly decrease the overshoot and sag of power turbine speed by more than 50% under constant flight conditions. Under variable flight conditions, INDI control method based on Jacobi matrix can effectively decrease the overshoot and sag of power turbine speed by more than 30% compared with INDI control method based on single SVM, which has more significant control effect and superior robustness, and realizes the fast response control of turboshaft engines.
Keywords
Introduction
Due to unique performance advantages, helicopters are gradually playing an important role in military and civilian fields. Since the 1950s, turboshaft engines have become the main power unit of helicopters because of outstanding advantages such as light weight, large power-to-weight ratio, low vibration and easy operation.1,2 The turboshaft engine drives rotor and tail rotor through a power turbine and a transmission system composed of reducer and transmission shaft.3–5 In order to meet the high-performance requirements of the new generation of helicopters, it is particularly indispensable to develop an advanced engine control system. A successful engine control system tends to enhance the anti-interference ability of engine speed to external load and achieve rapid response control for turboshaft engines.
Currently, the cascade Proportion-Integration-Differentiation (PID) control structure combined with collective pitch feedforward is widely popular in turboshaft engine control.6,7 This scheme has simple design and strong practicality, but it has the disadvantages of limited performance, high frequency, weak anti-disturbance, and uncertainty. When helicopter maneuver flight, the time lag effect caused by rotor torque measurement delay and engine control dynamic response cannot be ignored. 8 Within a short time scale of maneuvering flight, this kind of lag must be taken into account in the design of control law. But the cascade PID lack of prediction and decoupling. Whether the load changes sharply, there will be a serious sag or overshoot of power turbine speed.9,10 Therefore, it is difficult to realize the rapid response control for turboshaft engines.
Thus, how to overcome the time lag effect, enhance the anti-interference ability of engine speed, and improve the dynamic characteristics of the system has been has been the focus of research.11–13 Since the inverse control method occurred, there has been an upsurge of research in academia.14,15 Nonlinear dynamic inverse (NDI) control method is beneficial to handle the dynamic characteristics of controlled plant so as to achieve the desired characteristics. Meanwhile, even if the operation state changes the control structure and gains remain the same. Therefore, NDI control method is widely adopted in the design of flight controllers. Such as, Meyer 16 first applied NDI to helicopter flight control. Then, Avanzini 17 explored the inverse dynamic flight control law for the UH-60 helicopter nonlinear model with rotor flapping motion. Furthermore, Hu Yanpeng 18 combines H∞ loop-shaping with NDI. The inner control law adopts NDI and the external loop adopts H∞ to eliminate the nonlinearity of the model and improve the robustness of the system.
However, in the actual process, when model precision decreases, it is difficult for NDI controller to eliminate the nonlinear components of the system accurately, thereby reduce the control quality. Aiming at overcoming poor robustness performance of NDI, many scholars have taken quantities of actions. There are mainly two available techniques: INDI 19 and adaptive nonlinear dynamic inverse (ANDI).20,21 The INDI control method uses Taylor series expansion to simplify the model and obtains the relationship between input increment and state vector. The introduction of increment replaces the original nonlinear model information, reducing the dependence on the model while improving the robustness of the system to disturbances. Based on INDI, P Simplício 22 adopts the method of state acceleration feedback signal to reduce the demand for model accuracy. To deal with the problems in INDI control method which are estimation of state vector for real-time feedback and time delay. Dang Xiaowei 23 utilizes Kalman filter to estimate the state vector to provide real-time feedback for control law based on INDI control method. High-frequency noise of the system is filtered out with a small delay. These researches have effectively solved the control problems of complex nonlinear systems, but rarely applied to the field of turboshaft engine control.
Therefore, in order to compensate for the deficiency of the research on the nonlinear control method for turboshaft engine, an incremental nonlinear dynamic inverse Control Method for turboshaft engine based on Jacobi matrix is proposed. First, the control law of turboshaft engine based on state variable model is obtained according to the mathematical derivation of INDI. Then, based on two-stage variable speed helicopter/transmission mechanism/turboshaft engine integrated simulation model, the engine SVM is available online through adopting Jacobi matrix and sequential quadratic programming algorithm, so as to express the steady and dynamic characteristics of turboshaft engines under different flight conditions precisely. Finally, several numerical simulations are conducted to validate the control effect of INDI control method compared with cascade PID controller and INDI control method based on single SVM.
Design of turboshaft engine control law based on INDI
Turboshaft engine is a complex system, and its dynamic performance varies with the flight conditions. When the dynamic characteristics change greatly, single controller is difficult to satisfy the control performance requirements. The conventional solution is to design the controllers at different speeds offline, then switch the controllers to meet the dynamic performance requirements in actual control process. However, switching controllers tends to affect the stability of the system; moreover, it is difficult to attain smooth transition between different controllers. INDI control method can handle the dynamic characteristics of the control variables in the whole process to achieve the desired characteristics, and it is beneficial to eliminate system nonlinear factors, which is compatible with nonlinearity and linearity. The control law can be proposed and designed directly according to the state equation of controlled plant.
Assuming that the nonlinear system can be expressed as a differential equation

According to the above formula, the derivative of the output with respect to time can be obtained as

In order to track the reference command of the system as fast as possible, appropriate control signals are constructed to produce the desired dynamic output. Then the control signal u(t) can be obtained by reversing the above formula.

When

When the number of columns is less than the number of rows, the pseudoinverse can be expressed as

When nonlinear system at the steady-state point (

In a very short time scale, the state increment

For the turboshaft engine with single input single output (SISO), if the output is extended to the state vector, the SVM is shown in the following formula.


According to the principle of INDI, the control low of turboshaft engine is

The reference model is used to impose the objective response to the commanded variable handed to the remainder control system Schematic of engine control principle based on INDI.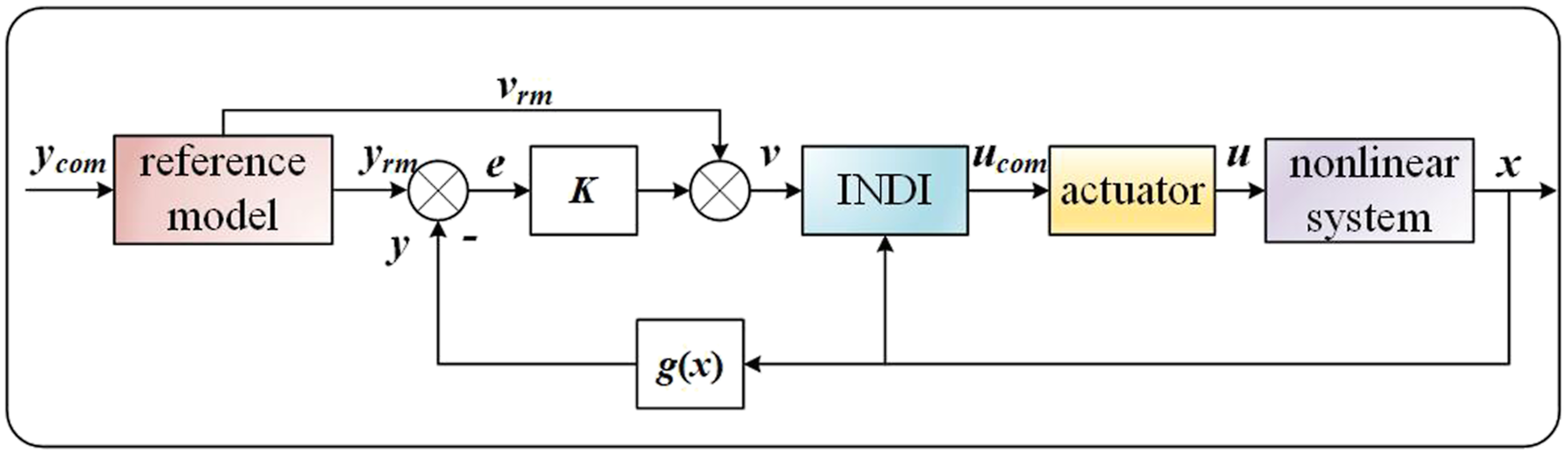
High-precision SVM of turboshaft engine
Real-time identification of state variable model
Turboshaft engine is a complex system with strong nonlinearities and couplings, which makes it hard to obtain accurate mathematical expression to express the operating characteristics. Nevertheless, INDI control method is based on accurate system analytic expressions. Consequently, it is necessary to establish SVM of turboshaft engine required for INDI real-time control method. The parameters of SVM will change with engine working state. 25 It means that in the entire dynamic process, the offline SVM obtained at a single working point cannot accurately characterize the operating state of the engine within the full envelope. Based on this, how to develop rapid and precise real-time model approach of the state variable modeling is particularly urgent.
For a SISO turboshaft engine whose state vector includes output vector, the control low of turboshaft engine based on INDI tends to obtain the appropriate dimension matrix
Assuming that the expression of nonlinear dynamic model of turboshaft engine is

Assuming that the control vector, state vector, and output vector at a steady-state moment are

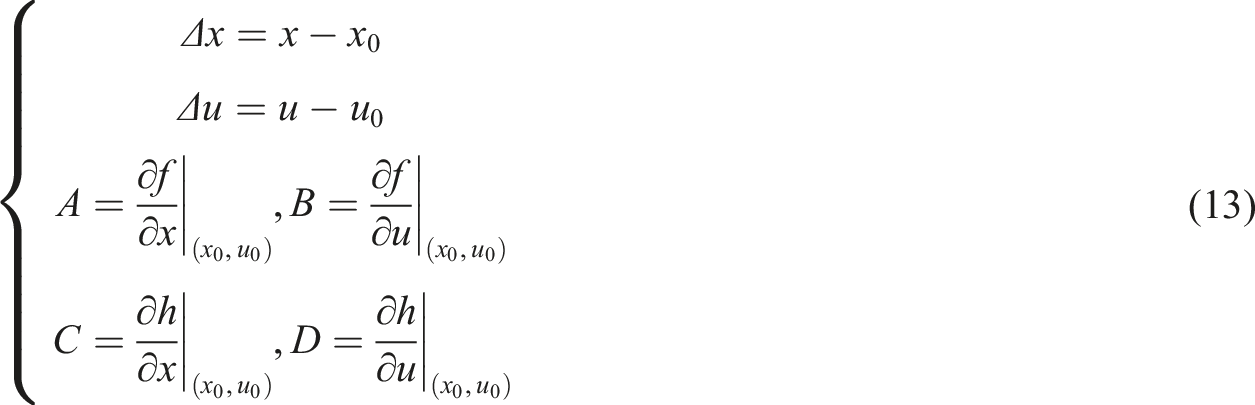
Noting that, the equation described in equation (13) is a variable parameter system. The acceleration of gas turbine speed and power turbine speed is not zero in the dynamic process. It can be expressed as

On the contrary, when the turboshaft engine is in steady state, the acceleration of the two rotors is zero, that is to say

For SISO turboshaft engine, the small disturbance model of turboshaft engine can be simplified as

Thus, based on the above method and Jacobi matrix, the state variable model of turboshaft engine for INDI real-time control is established.
Real-time modification of state variable model
INDI control method requires high model precision, failure to accurately modeling will bring inverse error26,27 into the system. During helicopter flight, as the mission keeps changing, the load of the turboshaft engine changes in a wide range, enhancing its nonlinear characteristics. As a result, the SVM obtained by using Jacobi matrix based on the single point state cannot accurately represent the engine state, while reducing the INDI controller’s control effectiveness under a large flight envelope.
In order to obtain a high-precision turboshaft engine SVM to improve the steady and dynamic control effects of INDI, it is indispensable to modify the SVM obtained online in real-time.
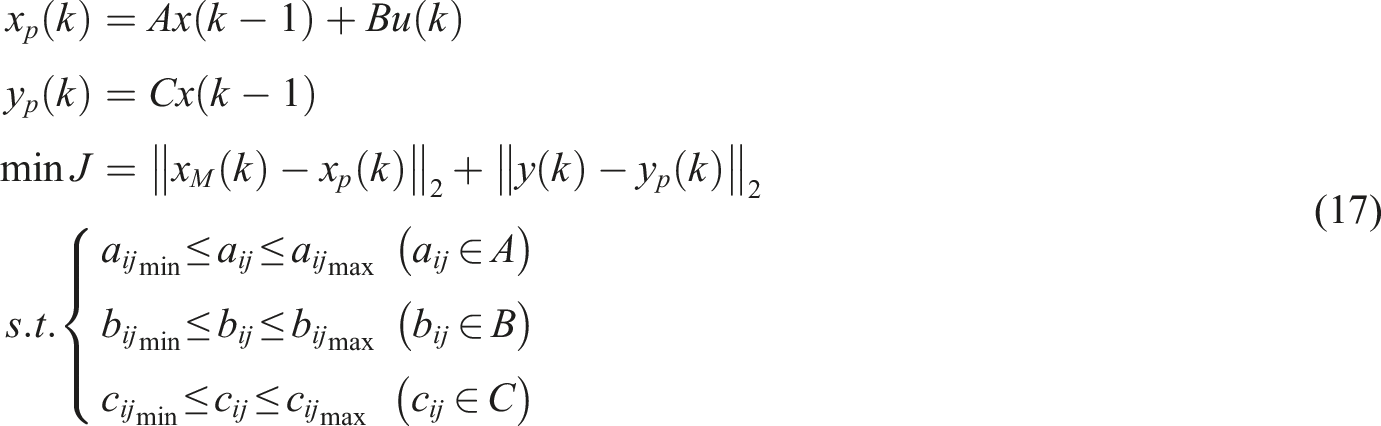
The real-time optimization process of SVM is shown in Figure 2. Using the measurable state parameters of turboshaft engine nonlinear component-level model at the previous moment to establish the SVM, the current engine state parameters are obtained by the SVM Jacobi matrix, compares them with the state parameters of turboshaft engine model at the current moment. When verifying the accuracy of the model during the engine modeling process, it is necessary to examine the measurable parameters of the engine. As a result, both output errors and state variable errors are the target. If the errors are within the set threshold range and satisfy the precision requirements, then the SVM will be applied to INDI controller to complete closed-loop control. Conversely, adopting SQP algorithm to deal with the following constrained optimization problem, the minimum error is taken as the objective function, and the matrix element neighborhood of turboshaft engine SVM obtained based on Jacobi matrix is taken as the constraint limit value. Once satisfying the precision requirements, engine SVM will be available. Optimization process of state variable model.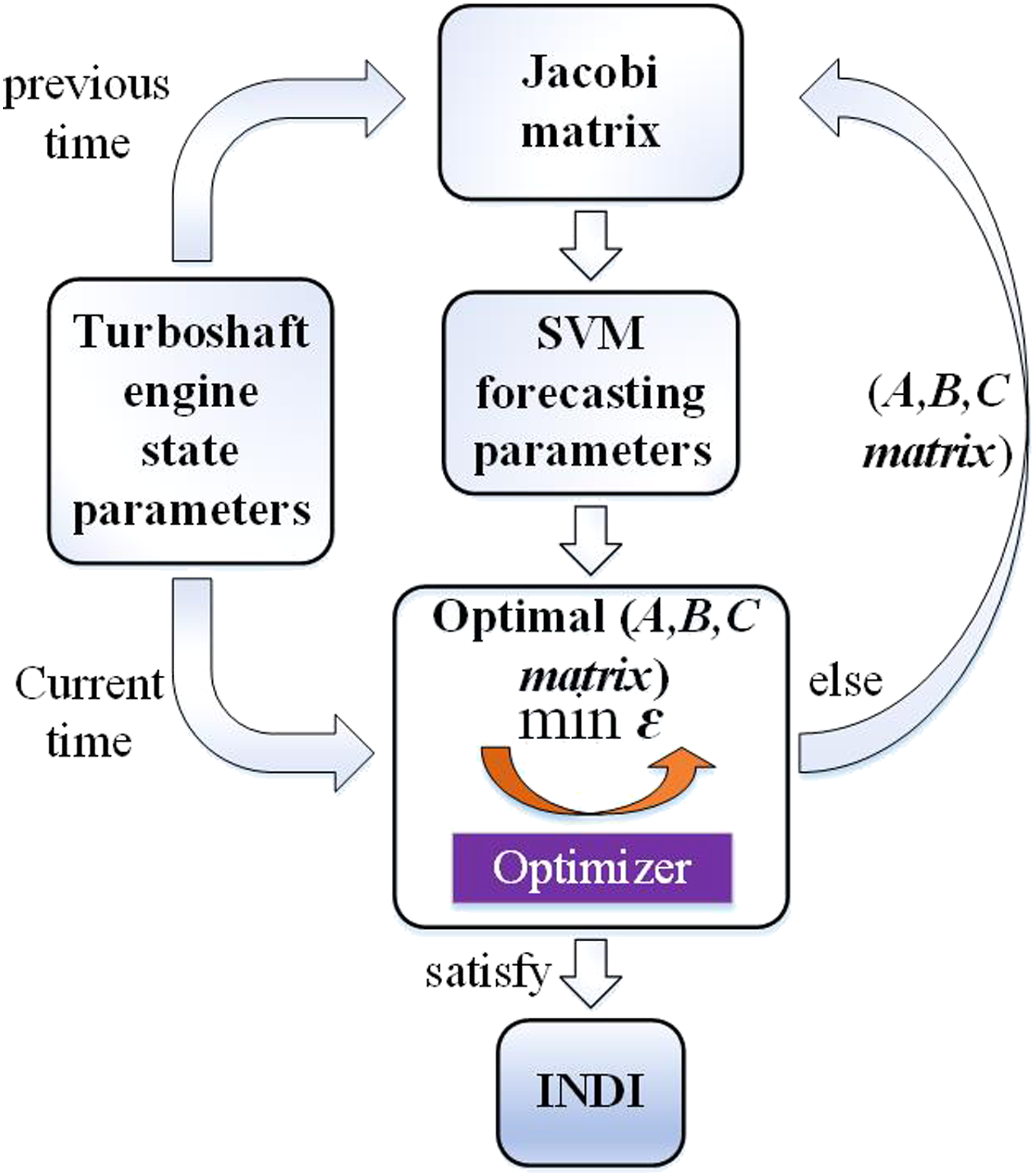
SQP optimization algorithm accomplishes the real-time modification of SVM, and the precision of the modified model satisfies the requirements of INDI control method.
The entire calculation process of INDI control method is composed of two turboshaft engine component-level models, one serves as the main model of the engine and the other as the mirror model of the engine, INDI controller, Jacobi matrix, and the modification of SVM. It includes three time-scales as follows: the longest time scale is model sampling step size, the longer time scale for Jacobi matrix to identify the turboshaft engine SVM online, and the short time scale for the modification of SVM. The flow chart of INDI controller based on Jacobi matrix is shown in Figure 3. Flow chart of INDI controller based on Jacobi matrix.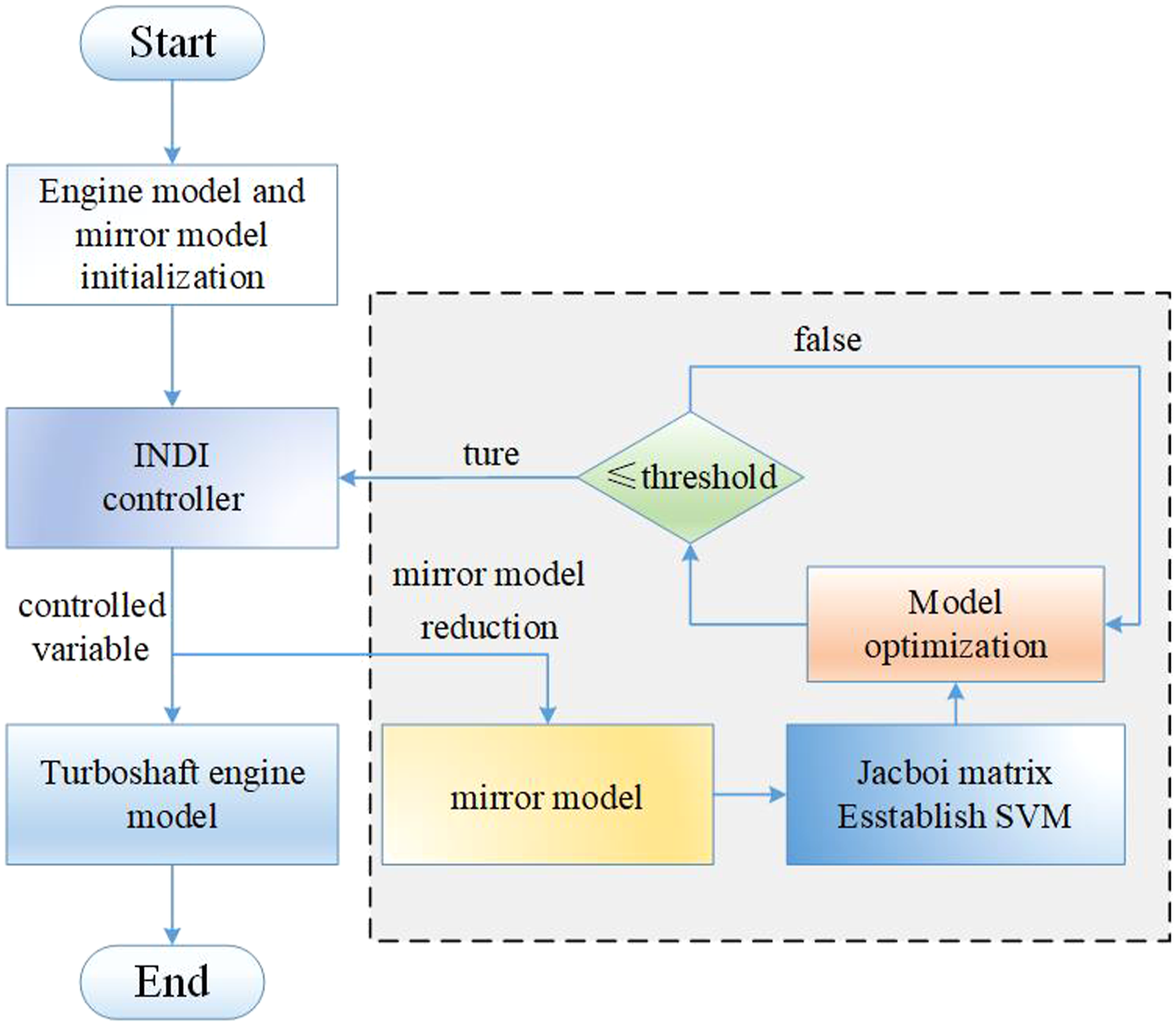
Within a single sampling step of turboshaft engine, based on the small disturbance method and the mirror model, the Jacobi matrix is adopted to establish SVM online. If the errors of SVM are within the threshold range, then adopt SVM to INDI controller to complete closed-loop control. Conversely, rolling optimization algorithm is applied to increase the precision of SVM until the relative errors are no more than the threshold. In addition, within a single sampling step, the mirror model of turboshaft engine reverts to the stable state before small disturbance, which means that in the longest time scale, the mirror model plays the role of state tracking and data backup for the main model.
Integrated simulation of INDI control method based on Jacobi matrix
First, based on MATLAB and C++, a variable speed helicopter/transmission mechanism/turboshaft engine integrated simulation model was constructed (as shown in Figure 4). The simulation verification of the power turbine speed control effect is carried out under the flying conditions of flying altitude H=1.0 km and forward speed ν
c
=118 m/s. Among them, turboshaft engine control variable is fuel flow, state vector consists of gas turbine speed, gas turbine front temperature and power turbine speed, and the output vector is power turbine speed. Structure diagram of INDI control for variable speed helicopter/engine.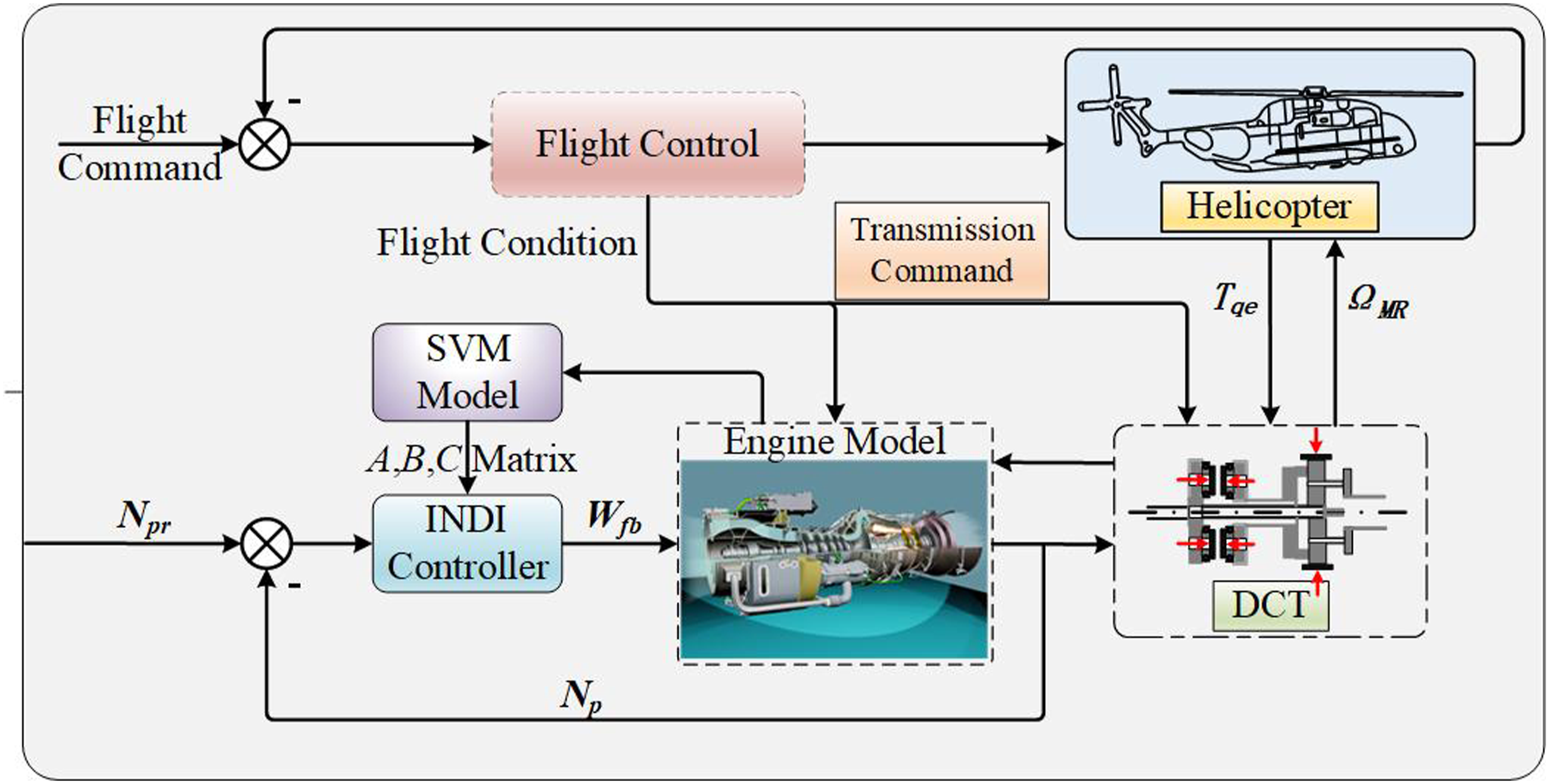
The simulation results under variable main rotor speed at constant forward speed shown in Fig. 5(a) to (h). Comparison of INDI based on Jacobi matrix for variable speed helicopter/engine with PID at constant forward speed. (a) Relative speed of gas turbine. (b) Relative speed of power turbine. (c) Fuel flow. (d) Main rotor speed. (e) Collective pitch. (f) Main rotor demanded torque. (g)Engine output torque.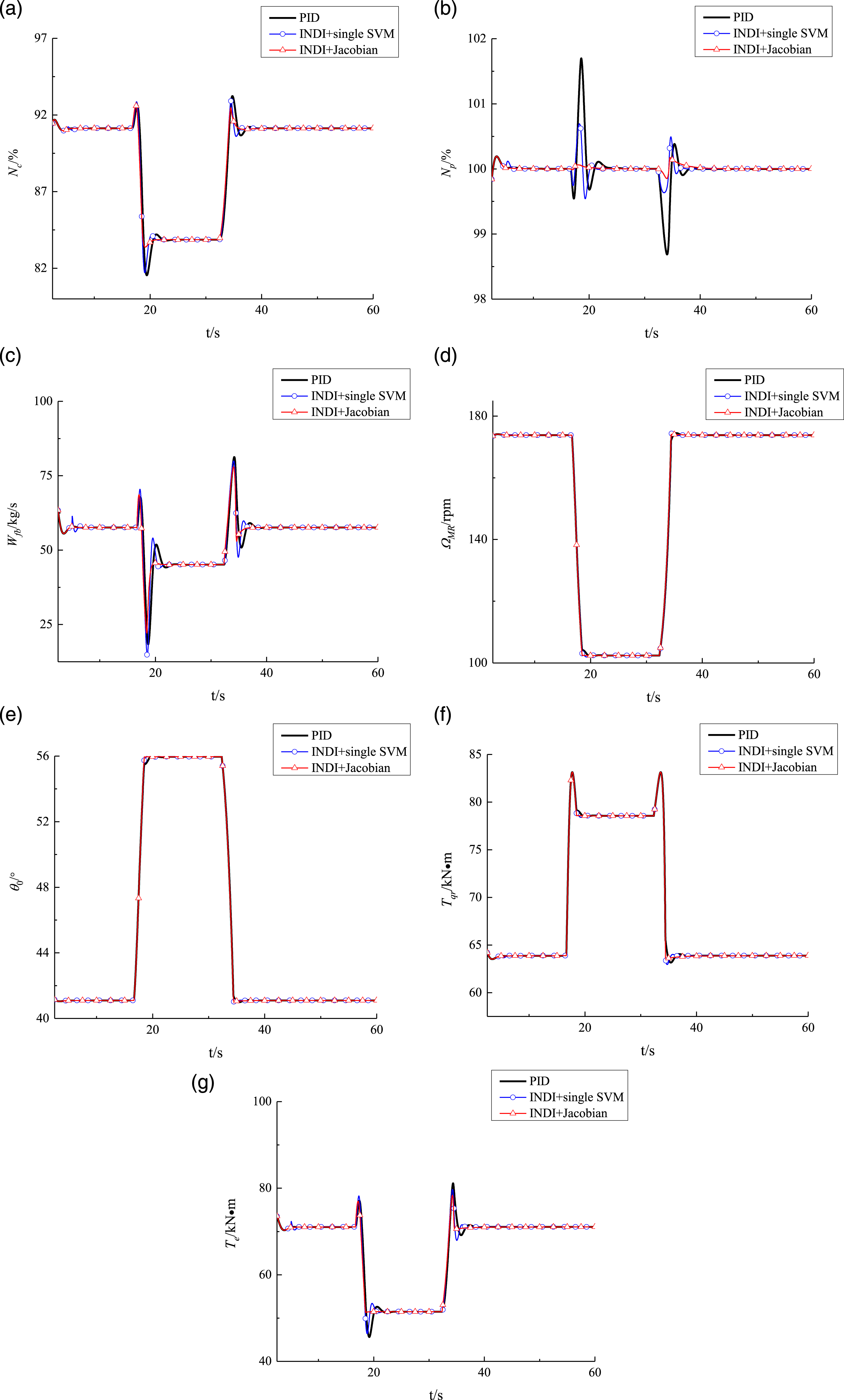
As shown in Figure 5(a) to (g), when the load changes, the PID controller, the INDI controller based on single SVM and the INDI controller based on Jacobi matrix can all change the rotor speed by approximately 42% along the designated path (as shown in Figure 5(d)), and the rotor speed change time is not more than 5 s. Compared with the PID controller, the INDI controller based on single SVM decrease the overshoot and sag of the power turbine speed during the process of changing main rotor speed by more than 60%, besides it can eliminate steady-state error. The reference model is introduced into INDI controller which can modify the reference instruction online according to the output of the system to achieve dynamic inverse control without steady-state error. During the rotor speed change process, although the helicopter flight conditions are the same, the load range of turboshaft engine is wide, and engine operating state presents greater uncertainty. Therefore, the INDI control effect based on single SVM is slightly insufficient. Conversely, the INDI control method based on Jacobi matrix identifies the SVM of turboshaft engine in real-time and adaptively selects the optimization algorithm to further modify the model precision, hence the operating characteristics of the engine in the process of changing rotor speed can be characterized more accurately. The corresponding dynamic control effect is better than the former, which can decrease the overshoot and sag of the power turbine by more than 55%. As shown in Figure 5(e), the trend of the collective pitch is opposite to the rotor speed. Along with reducing rotor speed, helicopter required power decreases, turboshaft engine output power accordingly decreases, resulting in reduced fuel flow (as shown in Figure 5(c)), the gas turbine speed is consistent with fuel flow. As shown in Figure 5(g), the engine output torque increases during the rotor speed increases. This is due to the extra torque required to accelerate the rotor during the upshift process. During the handoff from the disengaging to the engaging clutch, there is no neutral condition. Hence, both clutches act as engine brakes when they slip.
Next, based on the integrated simulation platform of changing rotor speed, under the flying conditions of flying altitude H = 1 km and forward speed as shown in Figure 6(a), verifying the robustness of INDI controller based on Jacobi matrix. The load of two-stage variable speed DCT is consistent with constant forward speed situation. Comparison of INDI based on Jacobi matrix for variable speed helicopter/engine with PID at variable forward speed. (a) Fly speed. (b) Relative speed of gas turbine. (c) Relative speed of power turbine. (d) Fuel flow. (e) Main rotor speed. (f) Collective pitch. (g) Main rotor demanded torque. (h)Engine output torque.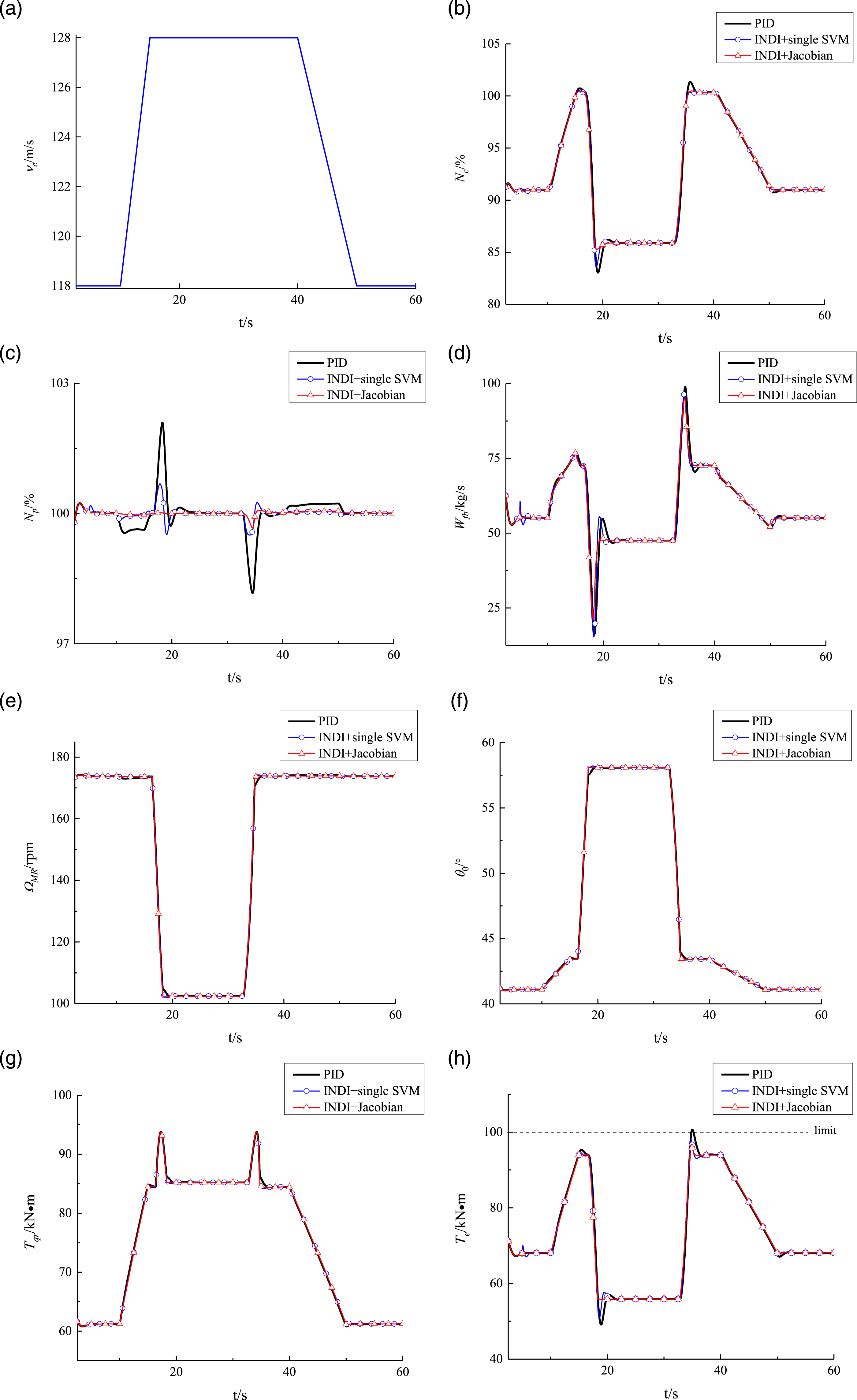
As shown in Figures 6(a) and (h), at t = 10 s, the forward speed of helicopter accelerates from 118 m/s to 128 m/s, then the rotor speed decreases from 174 rpm to 102 rpm. At t=35 s, the main rotor speed rapidly increases to 174 rpm, the forward speed of helicopter decelerates to 118 m/s after 15 s. In the phase of rotor speed reduction and forward speed acceleration, in Figure 6(c), the power turbine speed is slightly lower than the set value 100% after 10 s. Because the thrust increases during the acceleration, while the rotor speed decreases at this time. In order to keep the forward speed constant, the collective pitch has to increase (as shown in Figure 6(f)). Compared with INDI controller based on single SVM, the INDI controller based on Jacobi matrix can effectively decrease the overshoot and sag of the power turbine speed by more than 30%, which has significant control effect and superior robustness, realizing rapid response control of turboshaft engine. When the flight conditions change, the working state of turboshaft engine changes significantly. The SVM obtained initially cannot characterize the current working state of engine accurately. INDI control method based on Jacobi matrix identifies the SVM in real-time and adaptively selects the optimization algorithm to further modify the model precision, which eliminates the inverse error of the controller. Figures 6(d) and (e) represent the fuel flow and main rotor speed. As shown in Figure 6(b), based on PID controller, the relative speed of gas turbine is close to 102% from 35s to 40s, and there is a risk of over-speed. At the same time, as shown in Fig. 6(h), the peak of engine output torque exceeds the limit, which seriously threatens the static strength of turboshaft engine. Conversely, INDI control method based on Jacobi matrix can keep the relative speed of gas turbine at 100% or below, and the engine output torque is below the limit line at all times, which is beneficial to prolong the turboshaft engine life.
Conclusions
The research on incremental nonlinear dynamic inverse control method for turboshaft engine based on Jacobi matrix is carried out, which enhances the anti-interference ability of engine speed to external load and achieves rapid response control for turboshaft engine. Several conclusions can be drawn. (1) Under constant flight conditions, when the main rotor speed changes more than 40%, compared with cascade PID control method, both INDI control method based on single SVM and INDI control method based on Jacobi matrix can effectively decrease the overshoot and sag of power turbine speed by more than 50%. (2) Under variable flight conditions, compared with INDI control method based on single SVM, INDI control method based on Jacobi matrix can effectively decrease the overshoot and sag of power turbine speed by more than 30% and keep the relative speed of gas turbine at 100% or below. Meanwhile, the engine dynamic response quality during the process of variable rotor speed and maneuver flight is better. (3) Based on the acquisition of turboshaft engine SVM for INDI controller, comprehensively considering the inverse error caused by the precision of main model, SQP algorithm is adopted to optimize SVM in real-time. INDI controller based on Jacobi matrix has better response control effect without losing real-time performance, and significantly enhances the anti-interference ability of the turboshaft engine output shaft speed.
ORCID iD
Jie Song https://orcid.org/0000-0003-1285-4620
Yong Wang https://orcid.org/0000-0003-0868-5465
Haibo Zhang https://orcid.org/0000-0001-9165-9211
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Science and Technology Major Project (J2019-I-0020).