
Abstract
A micro-electromechanical system’s reliability depends strongly upon its periodic motion; however, the pull-in instability might arise when the applied voltage is high enough. No criterion is available to judge the reliability condition in a simple but effective way. This paper tackles this challenge mathematically. The sufficient conditions for the periodic motion and the pull-in instability of a micro-electromechanical system with a current-carrying conductor are established, respectively. There is an uncertain area, where the system behaves firstly periodic motion, and after a certain number of cycles, the pull-in instability occurs. This new phenomenon is called as a pseudo-pull-in stability (pseudo-periodic motion); its main factors affecting the pseudo-periodic motion are elucidated.
Keywords
Introduction
The last two decades have witnessed a skyrocketing interest in the micro/nanoelectromechanical system, sparked by its wide advanced applications in nanotechnology, micro-devices, micro-sensors, micro-actuators, and micro-power generators,1-6 and it has been caught a renewed attention to the pull-in stability from both industry and academia because the pull-in instability is an unwanted phenomenon,7-11 which causes unreliability. Much effort was made to avoid the pull-in instability. Tian et al. revealed that the pull-in instability can be eliminated in a fractal space;12,13 K.L. Wang 14 and C.H. He 5 established a variational principle for the fractal MEMS system; Zhang et al. outlined the main factors affecting the pull-in instability. 15 Additionally, equilibrium analysis 16 and nanofluid dynamics 17 were also involved for the MEMS research. Due to the development of nanotechnology, especially the emergence of graphene and nanotube, nanoelectromechanical systems have the systems ever smaller with more special applications.18-22 Now, the NEMS systems consist of single- and multilayer graphene sheets, and molecular scale electromechanical systems are the thinnest resonators, and their dynamical properties become ever more complex.
The electromechanical system operates periodically when the voltage is smaller than a threshold value, beyond which the pull-in instability occurs. 23 The pull-in voltage has led to skyrocketing interest in analytical methods,24-29 numerical methods, 30 and experimental methods, 31 and a fast insight into the system’s operating properties is needed for practical applications.
This paper considers a MEMS system as illustrated in Figure 1, where the current-carrying conductor produces a force, which can be calculated as
23
MEMS with a current-carrying wire.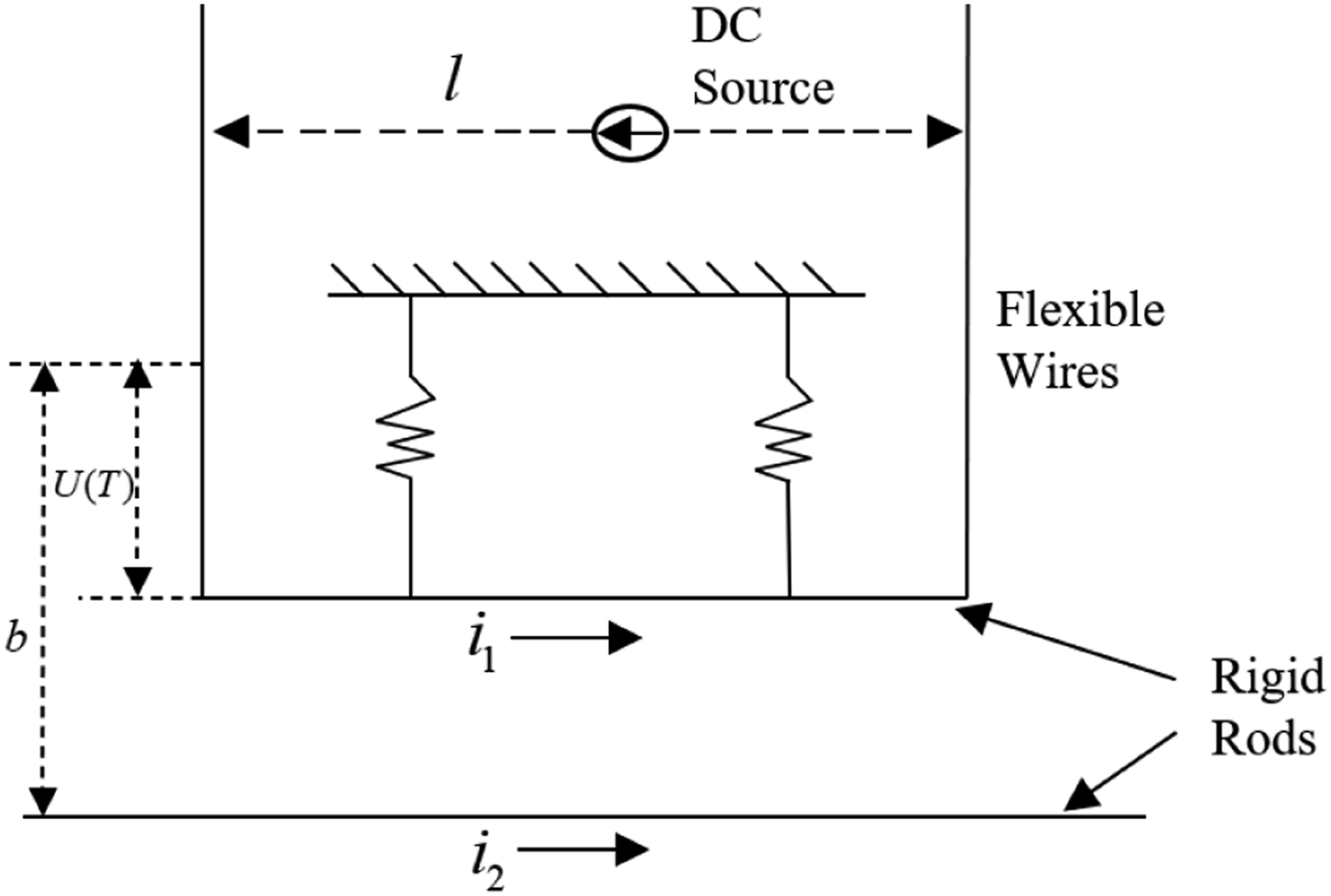

The spring system produces a nonlinear restoring force

According to Newton’s second law, the system’s governing equation can be written as

Equation (3) can be simplified as


Equation (4) is a nonlinear oscillator with a singular nonlinearity and it is similar to the well-known Helmholtz–Duffing oscillator;32,33 it becomes Duffing oscillator32,33 when
Pseudo-pull-in stability (pseudo-periodic motion)
Periodic criterion
The period or the frequency of a nonlinear oscillator can be easily obtained for various non-secular cases, and the singular term in equation (4) makes it extremely difficult when an analytical method, for example, the variational iteration method 34 or the homotopy perturbation method,35-40 is used.
The periodic criterion of equation (4) can be approximately obtained according a general sinusoidal vibration of a linear spring, that is, the direction of acceleration is opposite to that of displacement during all periodic motion. We consider a general differential equation

For the MEMS system,

In equation (6),

For Duffing equation,
Pull-in instability criterion
Equation (8) is the sufficient condition for periodic solution of equation (6). Similarly, we have the following non-periodic criterion, that is

For our MEMS system, the non-periodic criterion is the pull-in instability criterion. So, we have the following sufficient condition for pull-in instability

If equation (10) is satisfied for all

The pull-in stability criterion is

Equation (12) is the sufficient condition for pull-in instability. For example, when From pull-in stability to pseudo-pull-in stability and finally to pull-in instability: (a) phase diagram; (b) periodic motion; (c) pseudo-periodic motion; and (d) pull-in instability.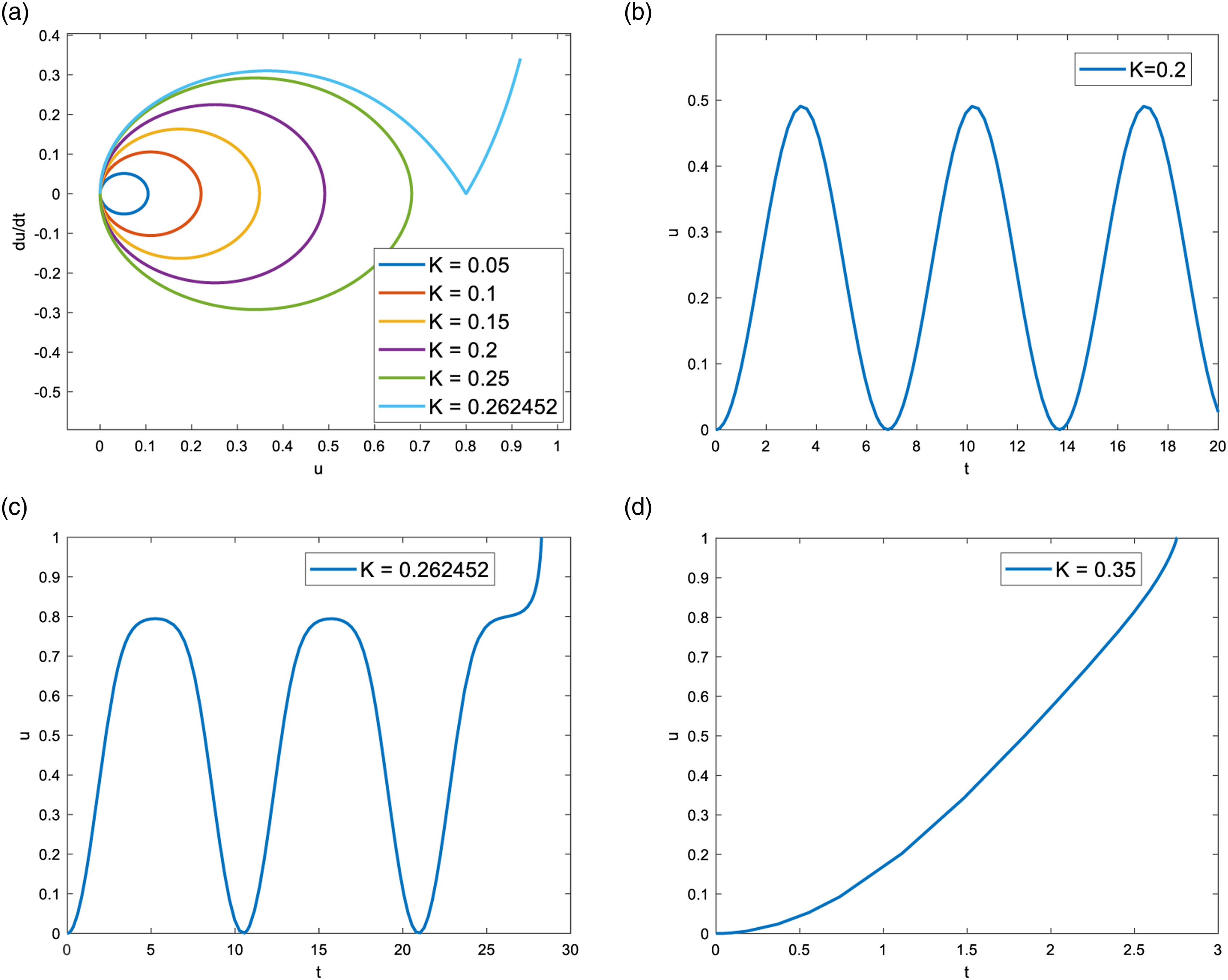
The frequency formulation
He’s frequency formulation
41
has been considered as the simplest approach to nonlinear oscillators. Here, He–Liu’s modification
42
is used

Equation (13) is valid for an approximate solution in the form

For our MEMS system, we choose the weighting function as

For the periodic solution, it requires that


For example, when

The pseudo-pull-in stability (pseudo-periodic motion)
The even terms involved inexplicitly in equation (4) will lead to a non-periodic solution, and instability arises. 51 Nonorthogonality analysis 52 is widely used for the coherence resonance and stochastic bifurcation behaviors of an oscillator. 53
When
We choose Pull-in instability after a long pseudo-periodic motion.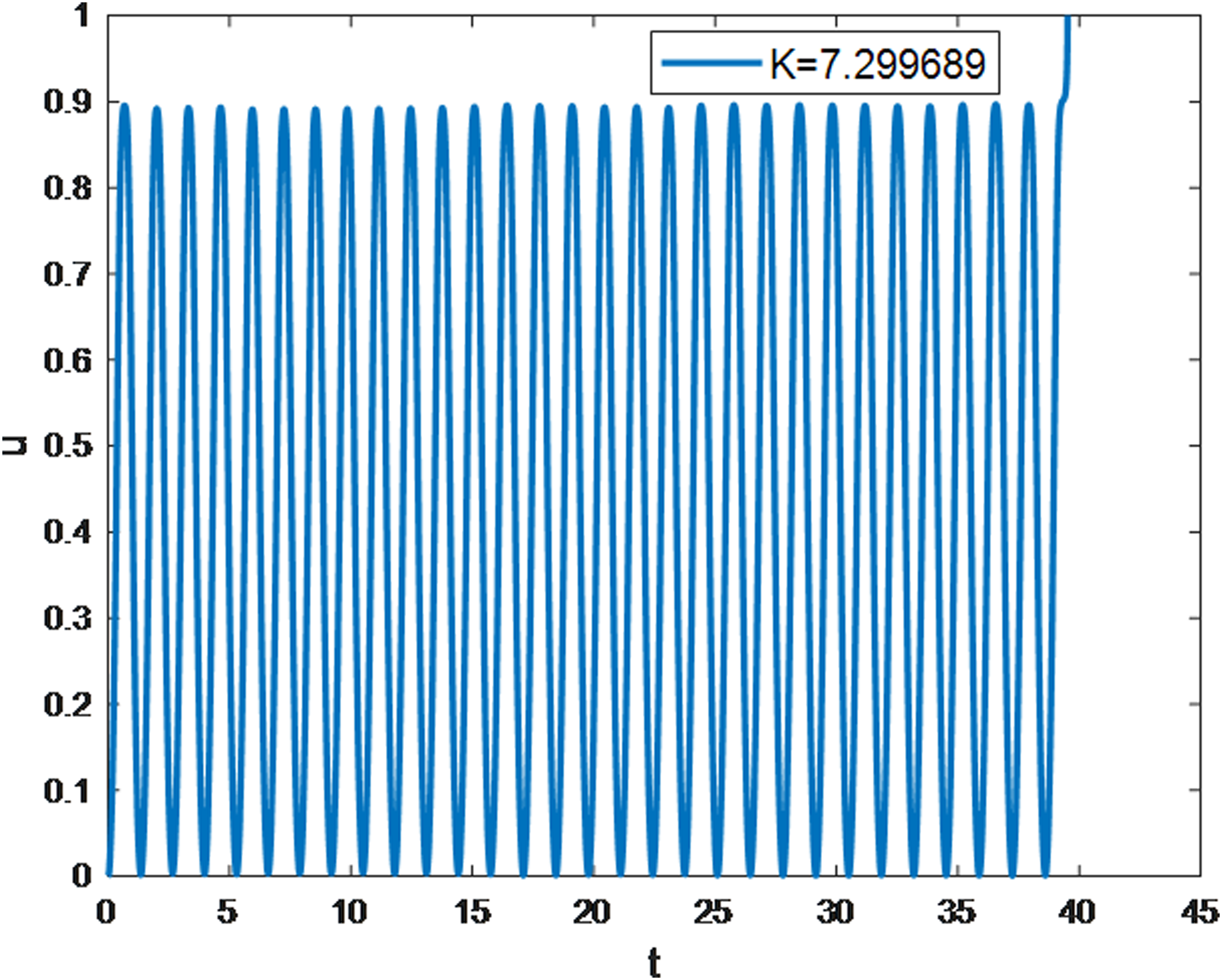
Discussion
When
This paper finds the missing piece of the puzzle when it comes to the pull-in voltage; it clearly elucidates the pseudo-pull-in stability, which was not found in previous literature. The concept is going to change everything you ever thought was real about the traditional MEMS system. Now is the time to tackle the urgent issue on the energy crisis; like other energy harvesting technologies,54,55 MEMS systems56,57 can tackle this challenge effectively.
Conclusion
This paper has opened the path for a new way to study pseudo-pull-in stability, and there leaves much space to further improve the accuracy of the pseudo-pull-in stability, and the homotopy perturbation method or the variational iteration method might provide an unprecedented effective tool for accurate analysis of the periodic properties.
To be concluded, this article reveals, for the first time ever, the pseudo-pull-in stability, and it oscillates for some amount of periodic motion, but it will become pull-in instable finally. This phenomenon is important for practical applications; as the pull-in instability is not wanted during its operation, the pseudo-pull-in stability would delude the engineers that the system would operate in a normal working condition. This paper adopts simple mathematics concepts to deal with an unsolved problem in MEMS systems with great success. The essence of mathematics is to make the complicated pull-in instability much simpler,if an even higher accuracy is needed to predict the pull-in instability, the homotopy perturbation method58,59 has to be used.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project was supported by the Natural Science Foundation of Shaanxi Provincial Department of Education in 2022 (22JK0437).