
Abstract
Due to complicated transfer paths and strong background noise interference, the fault pattern information deeply hides in common features of the vibration signal at the engine surface. In this study, the refined composite multiscale fuzzy entropy (RCMFE) used to measure the irregularity and self-similarity of time series is proposed to quantify the feature of various fault patterns. Followed by RCMFE, the features dug out are recognized by a parameter-adaptive support vector machine based on the firefly algorithm (FASVM). After putting forward the diagnosing schematics, the RCMFE-FASVM is applied to a fault diagnosis case of a diesel engine on a test rig. A comparative analysis of the four methods to extract features and the four methods to recognize fault patterns are conducted. Results indicate the proposed method has superior recognition performance and can effectively identify the working states of the diesel engine, contrasting the existing methods. Under the small samples and features task of identifying the working states of a diesel engine, the recognition rate of the proposed method with more stability can reach 98.2%, which is larger than other methods. Given the superior performance of the proposed method, the number of input features and training samples should vary from 8 to 20 and from 35 to 50.
Keywords
Introduction
Due to the superiority over dynamic performance, working stability and security, and economy, diesel engine, as one significant power plant, has been widely applied to some specific domains, for example, engineering machinery, agricultural machinery, and military machinery in particular. Meanwhile, the complicated structure, interaction of various exciting forces, and poor working conditions frequently lead to the unexpected abnormalizes and faults of diesel engines, which have a significant influence on the practical application of a diesel engine.1,2 Therefore, it is curial importance that the unexpected states were detected timely or as early as possible.
With enhanced research on the fault diagnosis of diesel engines, various methods had been developed, which include the thermal parameters analysis-based methods, 3 the vibration analysis-based methods, 4 and the acoustic analysis-based methods. 5 Among these methods, due to the abundant working information about the reciprocating and rotating motion, cyclic impacts, and gas-liquid-solid interaction can be provided, the vibration analysis-based methods have been widely used and proved to be excellent diagnosis performance. 6 Thus, the vibration analysis-based methods for diesel engine faults diagnosis are focused on in the paper.
When the faults diagnosis of a diesel engine is conducted, there are two crucial steps as follows: feature extraction and faults pattern recognition. 7 The former is that the features were effectively extracted to reflect the prominent pattern information hidden in the vibration signal of diesel engines and input to the classifiers. The latter is that the extracted and determined features are input to the fault classifiers. Given the distribution and statistic of the extracted features under different states of diesel engine, the predetermined parameters in the fault classifiers are determined. After that, the trained faults classifier could be used to recognize the unknown state of the vibration signal of diesel engine. Therefore, the extracted features have a significant influence on the recognition performance of fault classifiers. Based on this, this paper focuses on the feature extraction for the default diagnosis of diesel engines.
In recent decades, various methods to extract features have been developed for the fault diagnosis for rotational machinery, which can be divided into four methods as follows: the based signal process methods, 8 the based information entropy methods, 9 the based sparsity measuring methods,10,11 and the based deep learning methods. 12 In the above methods to extract features hidden in the complicated signal, the third method has been widely used to monitor the working trend and state change of the equipment and is hardly treated as the features used to classify multiple states of equipment; 13 the fourth methods are based on the amount of historical working data of equipment, meanwhile, the obtained feature parameters by fourth methods are based on the optimization problem and hard to be interpreted.14,15 Due to that the extracted features are difficult to be interpreted and a larger amount of working data of rotational machinery is hard to be obtained, the third and fourth methods are ignored in this paper.
For the signal processing-based methods, given that the interference of strong background noise and complicated frequency components existing in the vibration signals of diesel engines, various signal processing methods are commonly used to reduce the noise and extract the prominent frequency components, hidden in the vibration signal of diesel engines. 5 After that, the processed vibration of diesel engine was calculated to feature the fault pattern information of the vibration signal of diesel engines, including time-, frequency- and time-frequency- domain statistic parameters, including means, standard deviation, kurtosis, skewness, gray values, and waveform factor. These commonly signal processing methods include empirical mode decomposition (EMD),16,17 intrinsic time scale decomposition (ITD),18,19 wavelet packet transform (WPD), 20 variational mode decomposition (VMD),21,22 empirical wavelet transform (EWT), 23 and their improved algorithms.24,25 Although, the based signal processing methods to extract the fault features of the diesel engine vibration signals have been proved to be successfully applied to diagnose the faults of diesel engines by various optimized methods. However, there are existing two shortcomings. One is that the above signal processing methods have some limitations:25,26 mode mixture in ITD and EMD, selection of wavelet basis functions in WPD, determination of central frequencies in EWT and predetermined number of modes and determination of central frequencies in VMD, which lead to the complicated and time-consuming procedure of extracting features. The other one is that the above statistic parameters are used to assess the various characteristics of the whole vibration signal of diesel engines, by which, the internal characters of the vibration signal are ignored and the optimized selection of features is needed.
To settle those drawbacks, various entropy-based methods have been introduced and developed into the feature representation of rolling bearing and gear,27–29 including sample entropy (SE) and 30 fuzzy entropy (FE) 31 .32–35 Those entropy-based methods in a single time scale are used to be measuring the complexity and irregularity of time series by assessing the internal self-similarity of time series, by which, the fault features, that is, periodicity, cyclic impacts, and cyclostationarity, hidden in the vibration signal of rotational machinery can be deeply mined. The larger entropy value means the more complicated time series. Given the multiscale characteristic of the real-world and complicated signals, Costa et al. 36 proposed multiscale sample entropy (MSE) based on the coarse-graining process to strengthen the representation on the complexity and irregularity of time series in multiple time scales. Given the undefined entropy values and the large fluctuations of entropy values in some time scales of MSE, Wu et al. 37 proposed an improved MSE algorithm, named refined composite multiscale sample entropy (RCMSE). On the other hand, in the sample entropy algorithm, the step function is used for statistics, which ignores the fuzziness of decision-making in practical engineering. Therefore, Chen et al. 38 proposed the fuzzy entropy algorithm (FE) based on fuzzy function and applied it to EEG signal analysis. Based on the superiority of FE compared with SE, and refined composite multiscale coarse-graining methods in RCMSE, Li et al. 39 developed an improved entropy method, termed refined composite multiscale fuzzy entropy (RCMFE). The above methods have been proved to effectively resist the disturbance noise and effectively mine the fault pattern information of vibration signal of rolling bearings and gears in the simplified test bench. However, the performance on featuring the vibration signal those entropy-based methods had hardly been validated on complicated equipment, that is, diesel engines, compressors, and so on.
After the faults features were extracted, a multiclasses classifier is utilized to conduct the faults diagnosis of diesel engines. With the extracted features based on RCMFE method, a multi-class classifier is needed to recognize the working state of diesel engines. The commonly used classifiers40–42 include k-nearest neighbor (KNN), 43 extreme learning machine (ELM), 44 random forest (RF), 45 and support vector machine (SVM). 46 Compared with other classifiers, the SVM classifier’s superiority in pattern recognition under a small sample has been validated. In SVM classifier, 47 the low-dimension data are mapped into high-dimension data, which is prone to recognize the class of data under small sample and feature tasks. However, the predetermined parameters, that is, kernel function, kernel function parameter, and penalty coefficient, have a significant influence on the recognition performance of SVM. Commonly, swarm intelligent search algorithms are used to determine the above parameters of SVM classifier. 48
In summary, to deeply mine the fault pattern information of the complicated vibration signal of diesel engines, RCMFE is introduced and applied to extract the fault features. After that, the above obtain features are input to the multiclass classifier based on SVM. Considering that the key pre-defined parameters of SVM have an obvious influence on the recognition performance, the firefly algorithm, as an excellent swarm intelligent search method, 49 is applied to determine the key parameters of SVM. And then, a novel fault diagnosis method based on RCMFE and parameter-adaptive support vector machine based on firefly algorithm (FASVM) is developed in this paper. To illustrate the excellent recognition performance, the proposed method is applied to the experiment data analysis of diesel engines, compared with the based different entropy methods: MFE, MSE, and RCMSE, and other multi-classes classifiers: k-nearest neighbor (KNN), extreme learning machine (ELM), and random forest (RF).
The rest of this paper is organized as follows. First, the detailed calculations of RCMFE, FASVM, and the proposed diagnosis method based on RCMFE and FASVM are shown. Secondly, the conducted experiment and data are illustrated. Thirdly, the experiment results are shown. Finally, the conclusions are summarized.
Method
Refined composite multiscale fuzzy entropy
Fuzzy entropy
In Sample entropy algorithm, Chebyshev distance function and Heaviside function are respectively used to evaluate the similar distance and similarity of two vectors, in which Heaviside function, as a step function, cannot effectively assess the similarity of two vectors. 50 Based on this, fuzzy entropy based on a fuzzy membership function was proposed. 51 Its calculation procedures are illustrated as follows: 51
(1) Given a time series with data length

(2) Given the high-dimension shorten data series

(3) Fuzzy membership function is introduced to further calculated the fuzzy similarity distance of the neighboring vectors:

(4) Given the high-dimension time series

(5) Given the embedding dimension

(6) According to the Shannon entropy theorem, the Fuzzy entropy of the initial time series

Multiscale fuzzy entropy with coarse-graining process
Fuzzy entropy is used to measure the complexity of given time series and may fail to account for the multiple time scales pattern information hidden in the complicated real-world signals. 31 Meanwhile, the fuzzy entropy values may mean arbitrary inconsistent and indistinguishable results. To settle this problem, coarse-graining theory is introduced to measure the complexity of given time series under multiple time scales, termed multiscale entropy. Thirty six multiscale fuzzy entropy (MFE) based on coarse-graining is calculated in two steps:
(1) Given a time series

(2) Fuzzy entropy is applied to calculate the entropy of each coarse-grained time series, termed MFE.

Refined composite multiscale fuzzy entropy
There are two shortcomings existing in the above coarse-graining in the MFE. First, the continuous sliding window with the stride equaling to time scale factors is used in the coarse-graining process, which leads to the breakage of some pattern information in the initial time series.
52
When time scale factors are two, the similarity of two vectors
To alleviate the above drawbacks, refined composite multiscale fuzzy entropy (RCMFE) is developed. RCMFE is also obtained in two steps. 53
(1) Given a time series Coarse-graining procedure: (a) Coarse-graining procedure in MFE and (b) Coarse-graining procedure in RCMFE.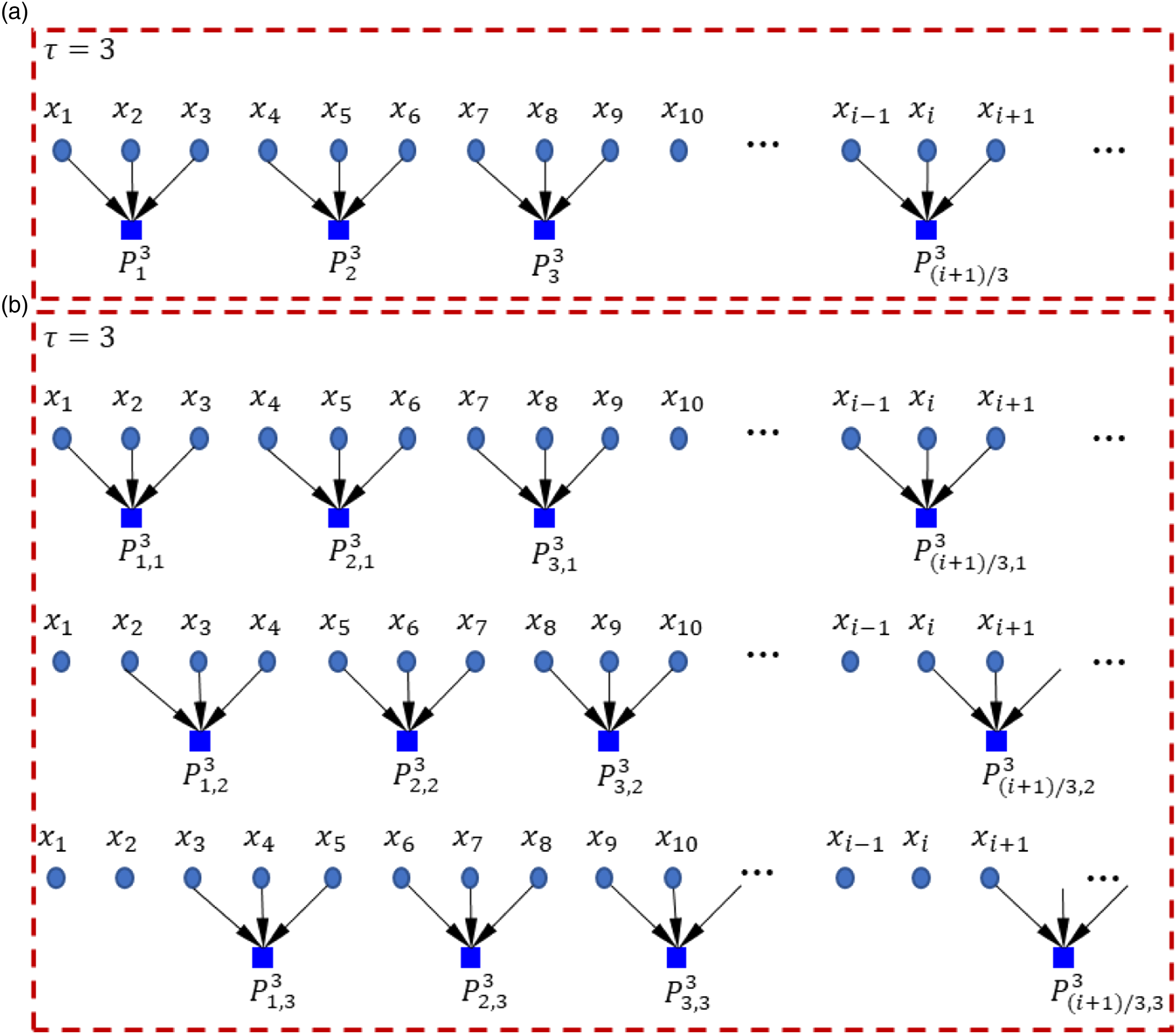

(2) When the time scale factor is determined, the fuzzy entropy of

The compared flowcharts of both MFE and RCMFE are shown in Figure 2. Totally, in RCMFE, the improved coarse-graining method and the entropy averaging method are applied to surmount the shortcomings, existed in MFE, by which the reasonable and stable entropy results are obtained. Flowcharts of calculating entropy value: (a) that of MFE and (b) that of RCMFE.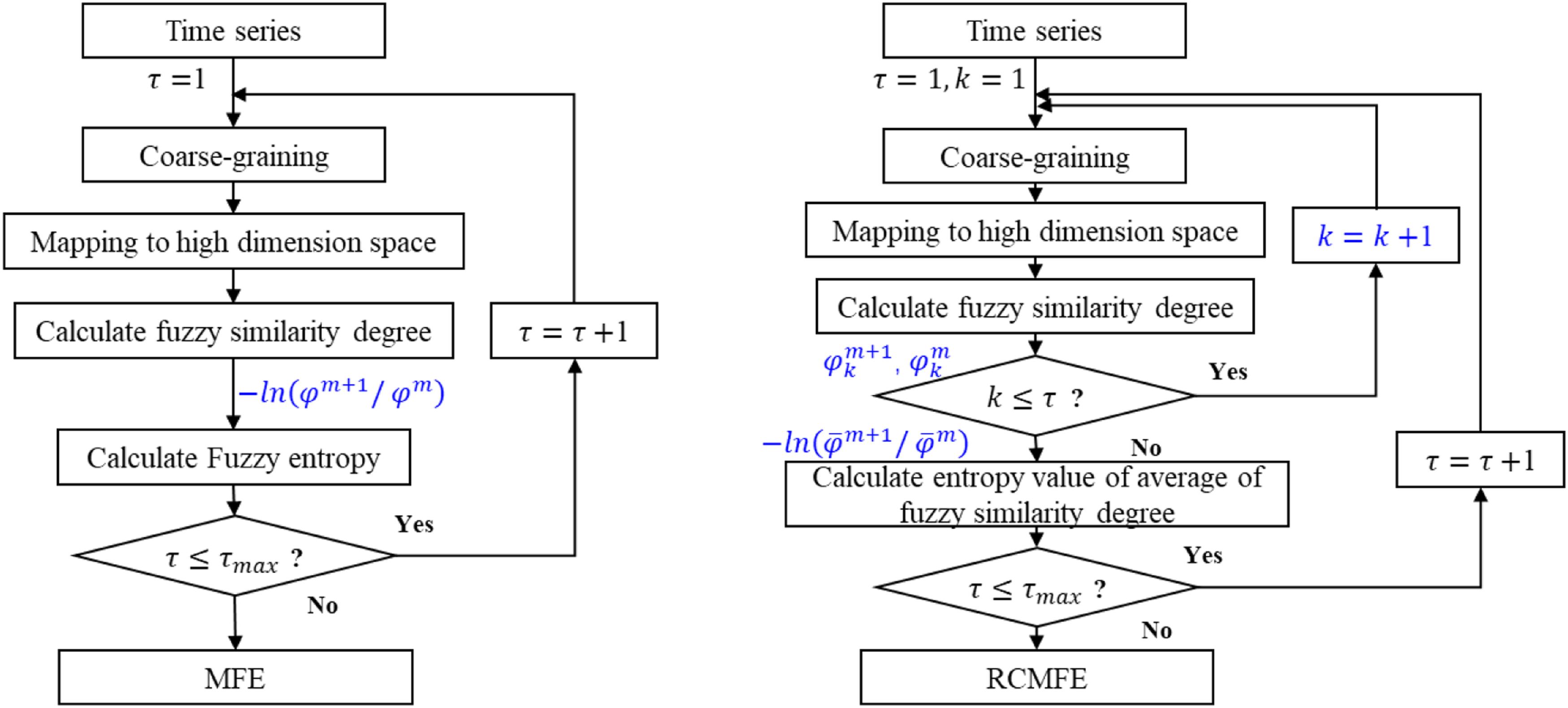
Firefly algorithm-based support vector machine classifier
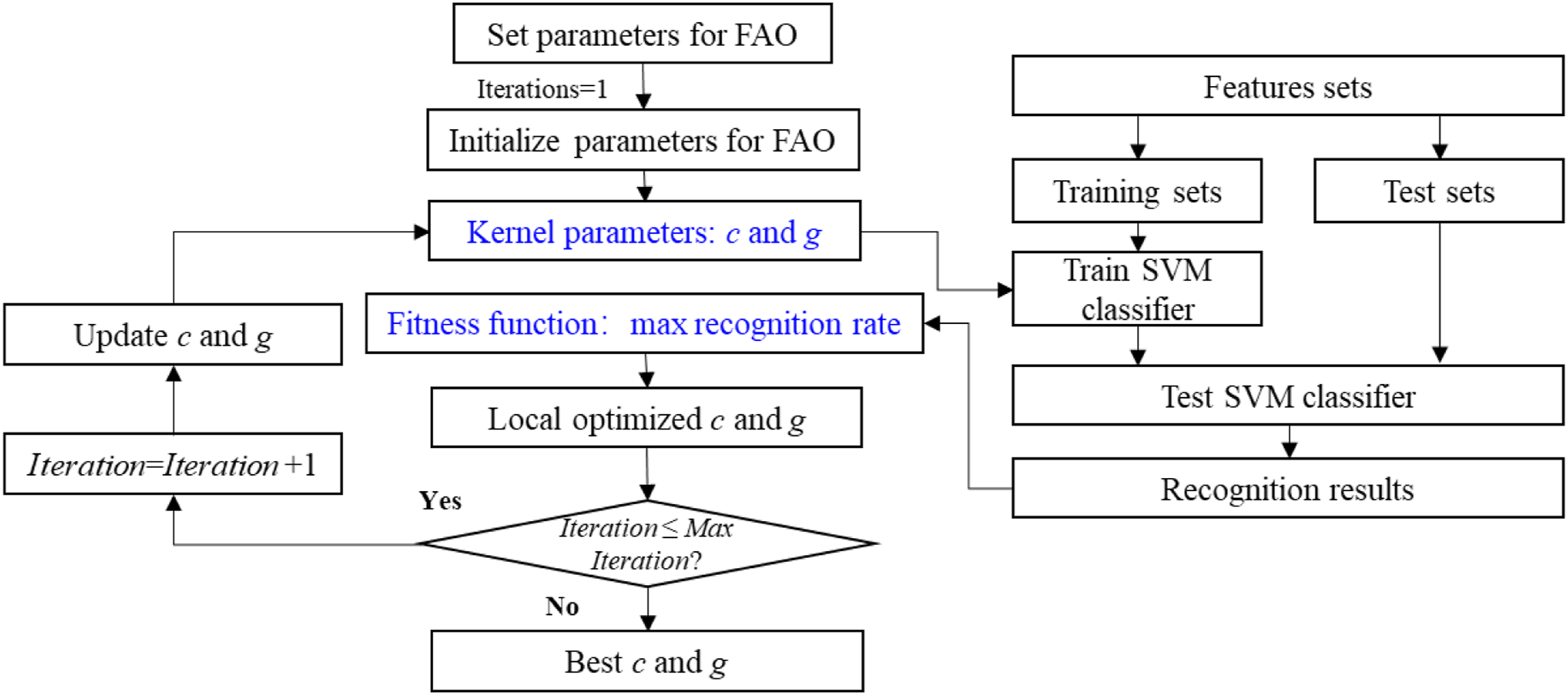
Given the superiority of SVM in the state recognition of rotation machinery, it was applied to achieve the state identification of diesel engines. Factually, in the application of SVM, various kernel functions should be predetermined, such as polynomial function, sigmoid function, and radial basis function (RBF) in particular. Here, the RBF is selected to map the data into a higher dimension space.
28
As known that the two parameters, (1) The collected samples based on extracted features are divided into respectively the training samples sets and the testing samples sets, both of which would be input into the SVM classifier. Meanwhile, (2) The parameters of the firefly algorithm are predetermined (shown in Table 1), that is, number of iterations, number of search agents, randomization parameter (3) The locations of all the fireflies, which mean (4) Given the best results under the above calculations, the locations of all the fireflies are updated. (5) According to the updated (6) Steps (4) and (5) are repeated until the number of iterations reaches the max number of iterations. Flowchart of FASVM. Parameters for firefly algorithm.

The proposed framework based on RCMFE and FASVM
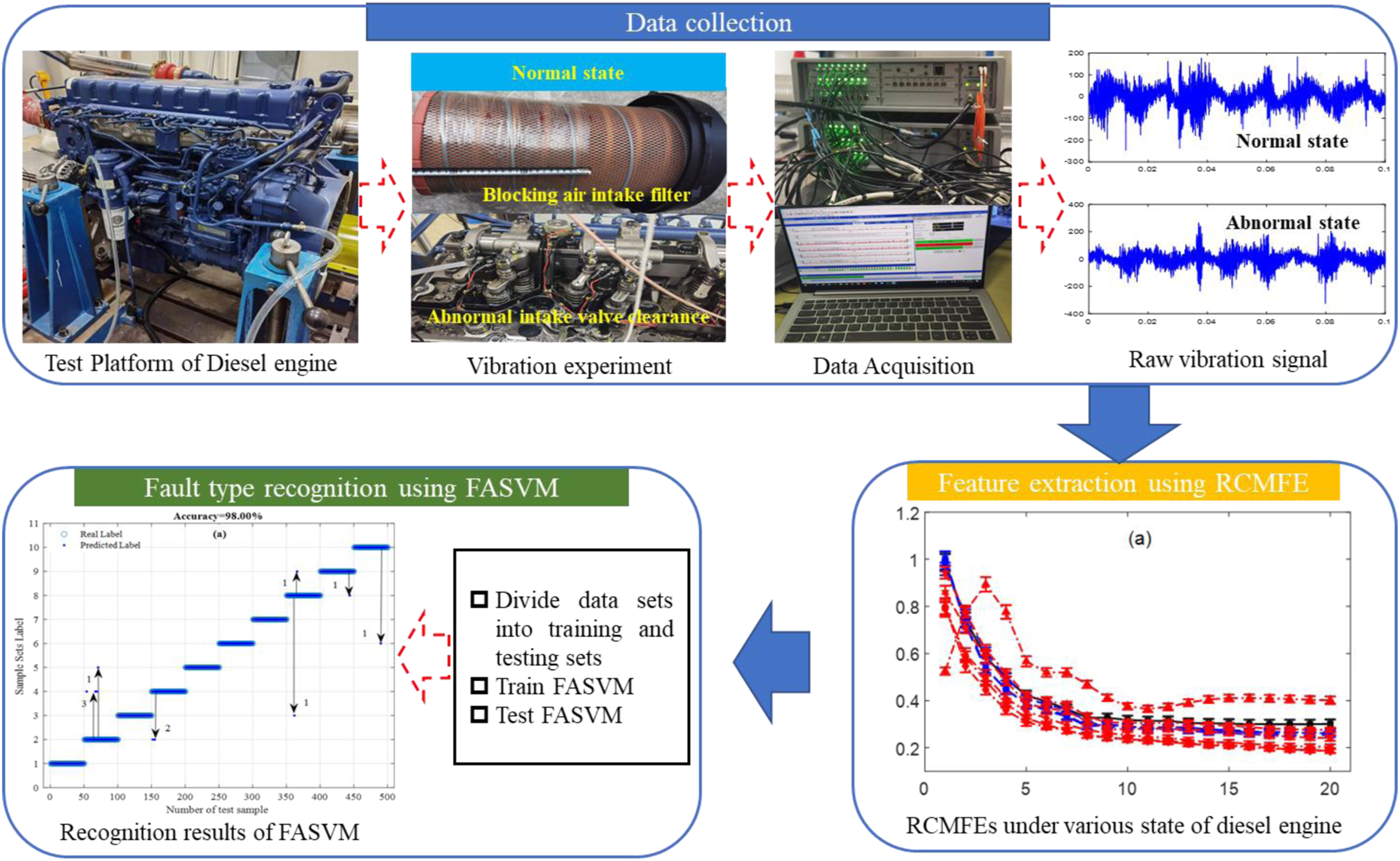
Based on the above analysis, the based RCMFE and FASVM diagnosis method for diesel engines is developed, where RCMFE and FASVM are respectively applied to feature the fault pattern information hidden in the vibration signal of a diesel engine and recognize the complicated state of a diesel engine. The whole procedure of the proposed framework based on RCMFE and FASVM is exhibited in Figure 4. The further detailed steps are summarized as follows: (1) The vibration experiment of a diesel engine with normal or abnormal states is separately conducted. Meanwhile, the vibration acceleration sensor is fixed on the body of the diesel engine and the vibration signal of the diesel engine under different states was collected with the determined speed, load, and sampling frequency. (2) The RCMFE values of all the raw vibration signals of the diesel engine under different states are calculated with the predetermined parameters and time scale factor in particular. (3) The whole sample set of RCMFEs under the vibration signal of different states was divided into the training sample sets and the testing sample sets. The training samples sets and the testing samples sets were respectively input into the based FASVM multi-faults classifiers. The former sets were used to train the classifier and determine the predetermined parameters in SVM, and the latter sets were applied to test the trained classifier using FASVM. With the above steps, the fault diagnosis of the diesel engine was conducted. Flowchart of the proposed diagnosis framework based on RCMFE and FASVM of diesel engine.
Experiment and data collection
In this subsection, the vibration test of one diesel engine was carried out on the test platform. As shown in Figure 5, the test platform mainly was composed of a diesel engine, a dynamometer, a measurement, and control system used to control the diesel and measure the heat parameters, and a data acquisition system mainly used to collect the vibration signal. Test platform.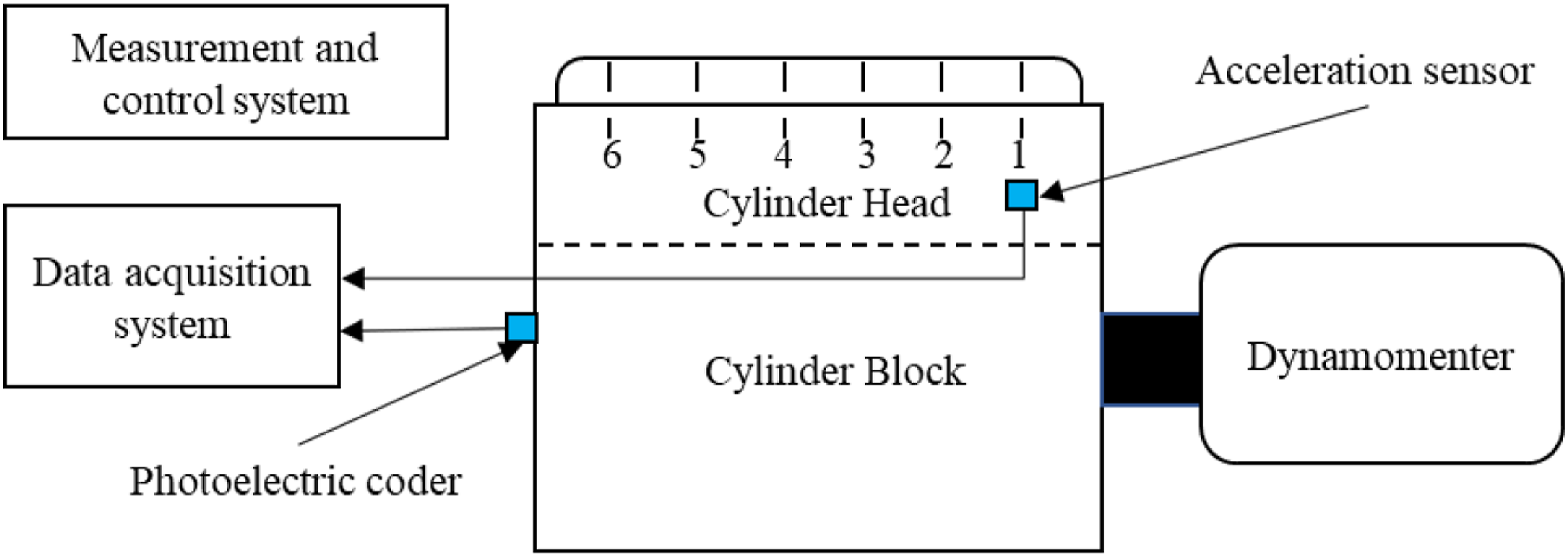
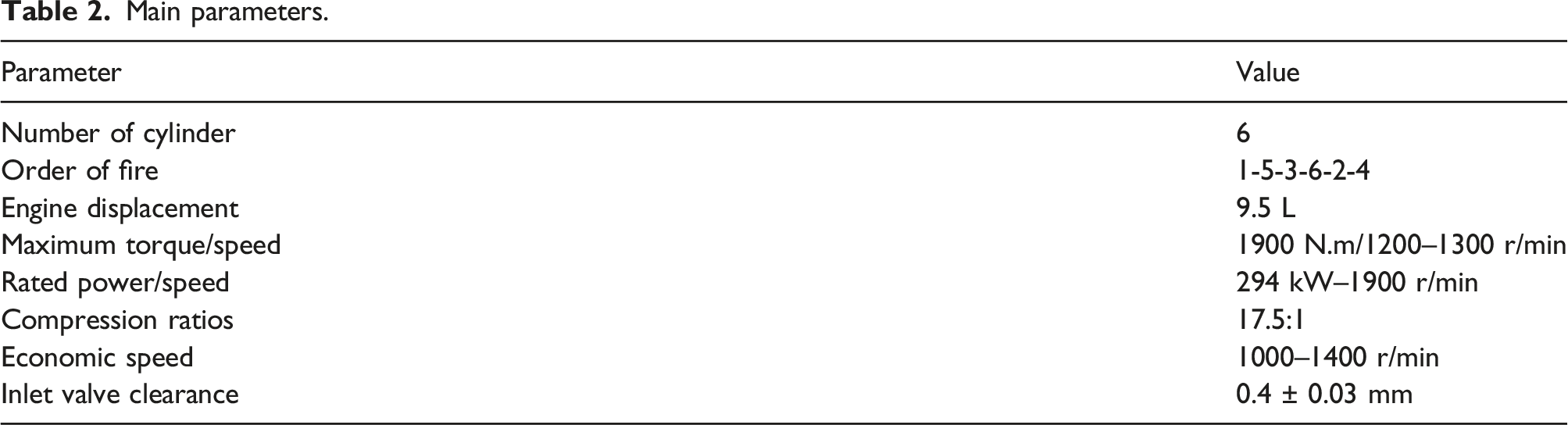
Main parameters.
Working state of the diesel engine in the experiment.
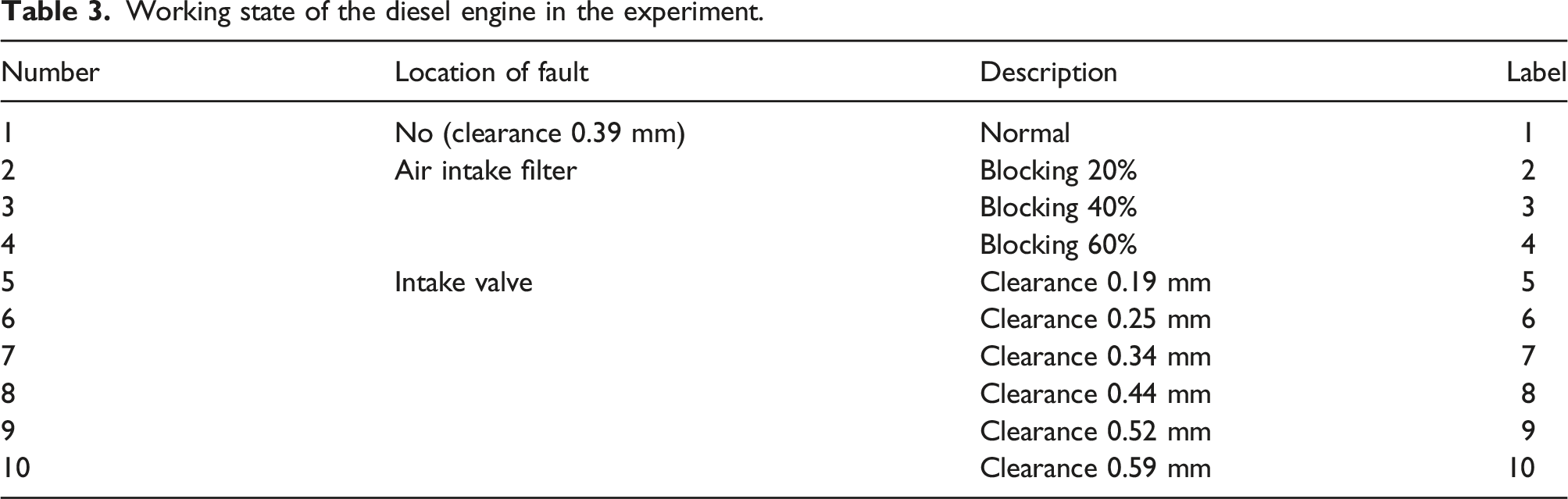
For each working state, the running condition with rotating speed at 1200 r/min and 75% load was considered in the experiment. Under the above running condition, a 10 s signal was collected in each working state. Considering the working cycle of a diesel engine, a sample with 5120 data points of each working state under 1200 r/min and 75% load was segmented and 100 samples of each working state were acquired. The time domain vibration signal of every working state is shown in Figure 6. It is difficult to recognize the states of the diesel engine from the time domain vibration signals. Time domain signal of each working state.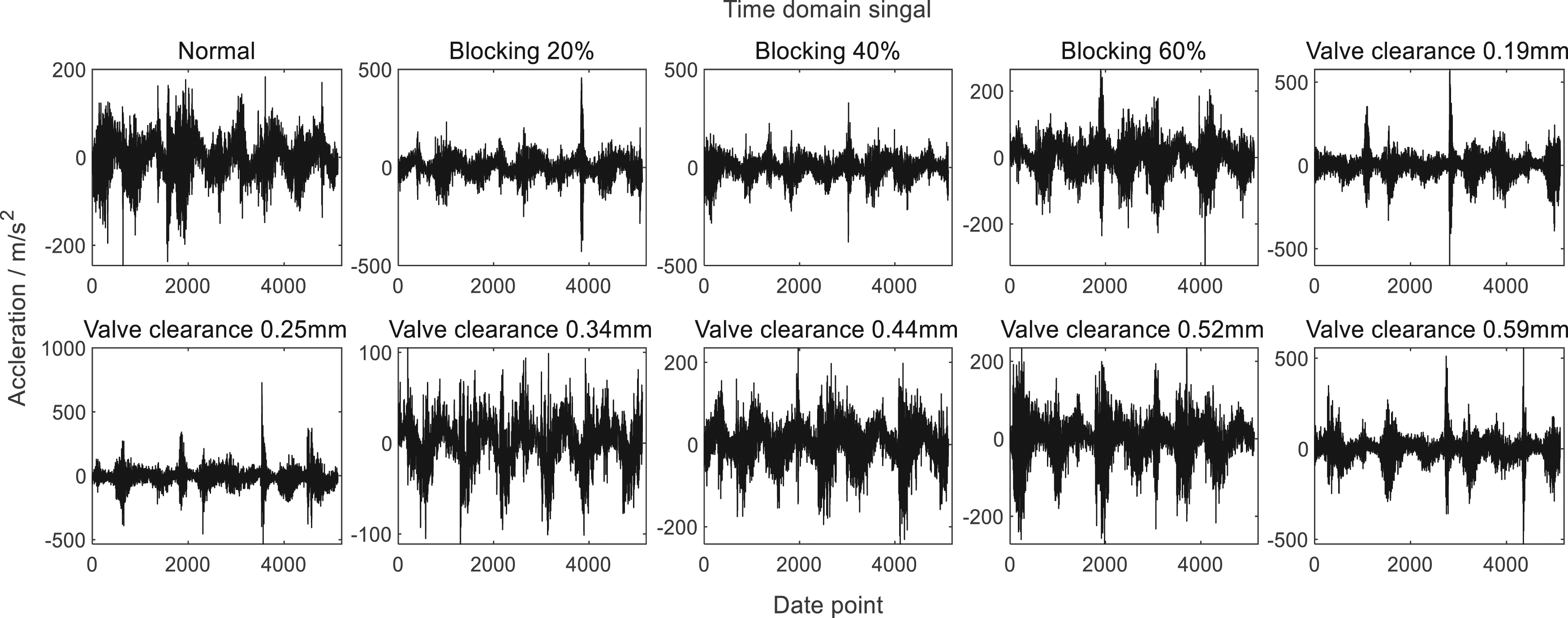
Experiment result
Features analysis of the vibration signal of the diesel engine
As the above description, 100 samples with 5120 points of each state of diesel engine were applied to test the performance of RCMFE in vibration signal analysis of diesel engine. RCMFEs, MFEs, RCMSEs, and MSEs of all the above samples were separately calculated. According to Ref. [26,29], the parameters of RCMFE and MFE are set as
In Figure 7, the mean and standard deviation of RCMFEs, MFEs, RCSEs, and MSEs are exhibited. It can be seen that RCMFEs, MFEs, MSEs, and RCMSEs of vibration signal of diesel engine decrease with the increasing of time scales, which indicates that the pattern information hidden in the vibration signal of diesel engine are represented at different time scales and the coarse-graining process is beneficial to feature the complex vibration signal of diesel engine. Second, RCMFEs of vibration signal of the diesel engine with little standard deviation fluctuate slighter than that of MFEs and RCMSEs, which have close fluctuation and fluctuate slighter than that of MSEs and this benefit for promoting the classification performance. Third, as exhibited in Figure 7, RCMFEs, MFEs, RCMSEs, and MSEs of vibration signal of each state of diesel engine differed insignificantly, due to that the above states have a similar influence on the working of diesel engine. Finally, the above feature analysis indicates the superiority of RCMFE to feature the fault pattern information of the diesel engine. Compared with MFEs, RCMSEs, and MSEs, RCMFEs are prone to be more stable, which benefits for the fault recognition of the vibration signal of the diesel engine. Mean and standard deviation of different methods of the vibration signal under each working state: (a) mean and standard deviation of RCMFE; (b) mean and standard deviation of MFE; (c) mean and standard deviation of RCMSE; and (d) mean and standard deviation of MSE.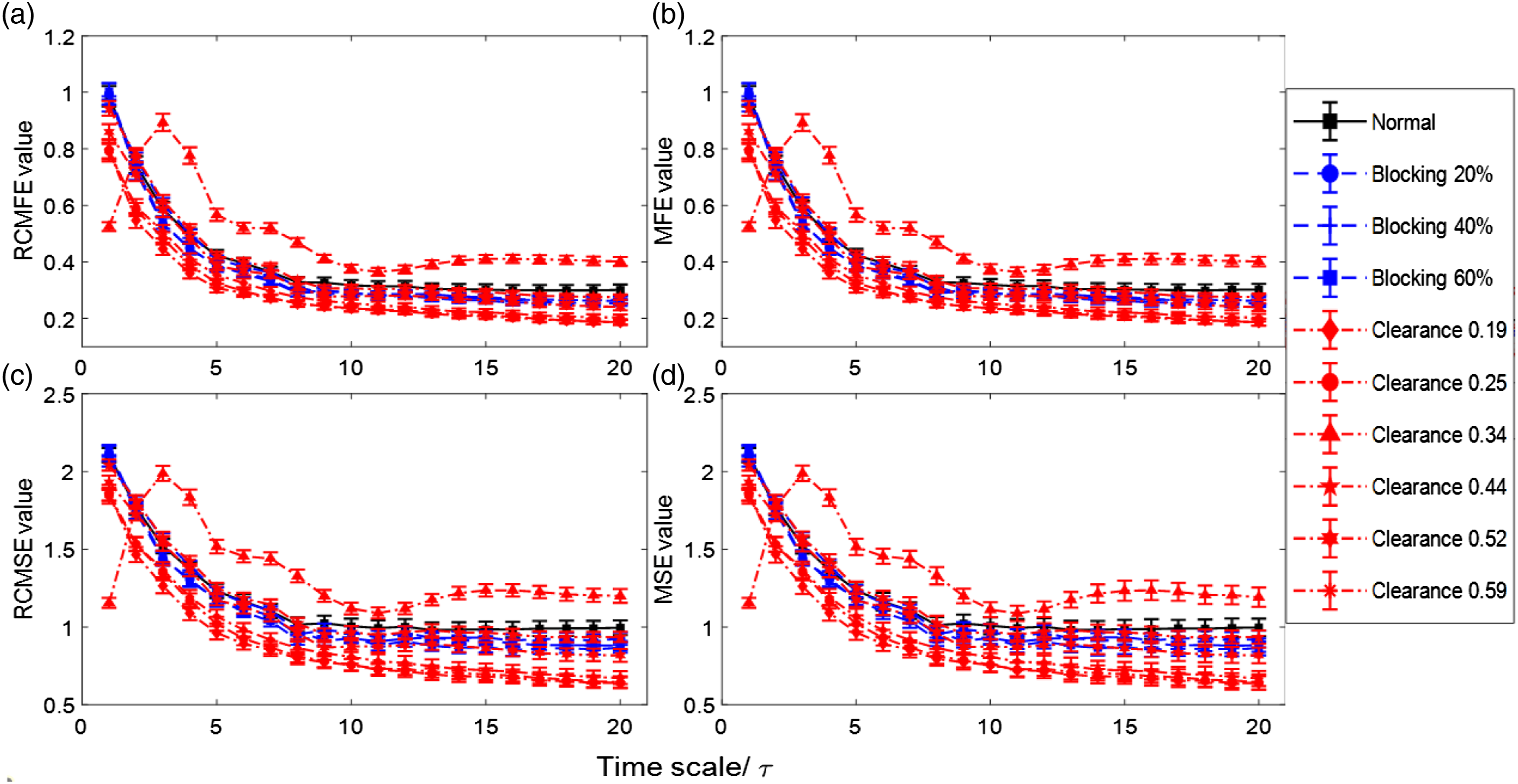
Next, to illustrate the superiority of RCMFE, RCMFEs, as well as MFEs, RCMSEs, and MSEs are visualized by t-SNE (t-Distributed Stochastic Neighbor Embedding). The results are shown in Figure 8, in which the number of the dimensionalities of all RCMFEs, MFEs, RCMSEs, and MSEs are reduced to two. The distribution of total samples has a significant influence on the recognition results, that the concentration of same-class samples and the dispersion of different-class samples in particular, which benefits the recognition of the diesel engine. As illustrated in Figure 8, compared with MSEs, RCMSEs, and MFEs, RCMFEs express the better dispersion of the different-class samples and the aggregation of the same-class samples, with the mixtures of small samples under different classes. The distribution of RCMFEs is beneficial to the further fault recognition of the diesel engine. Features distribution of four methods: (a) RCMFE; (b) MFE; (c) RCMSE; and (d) MSE.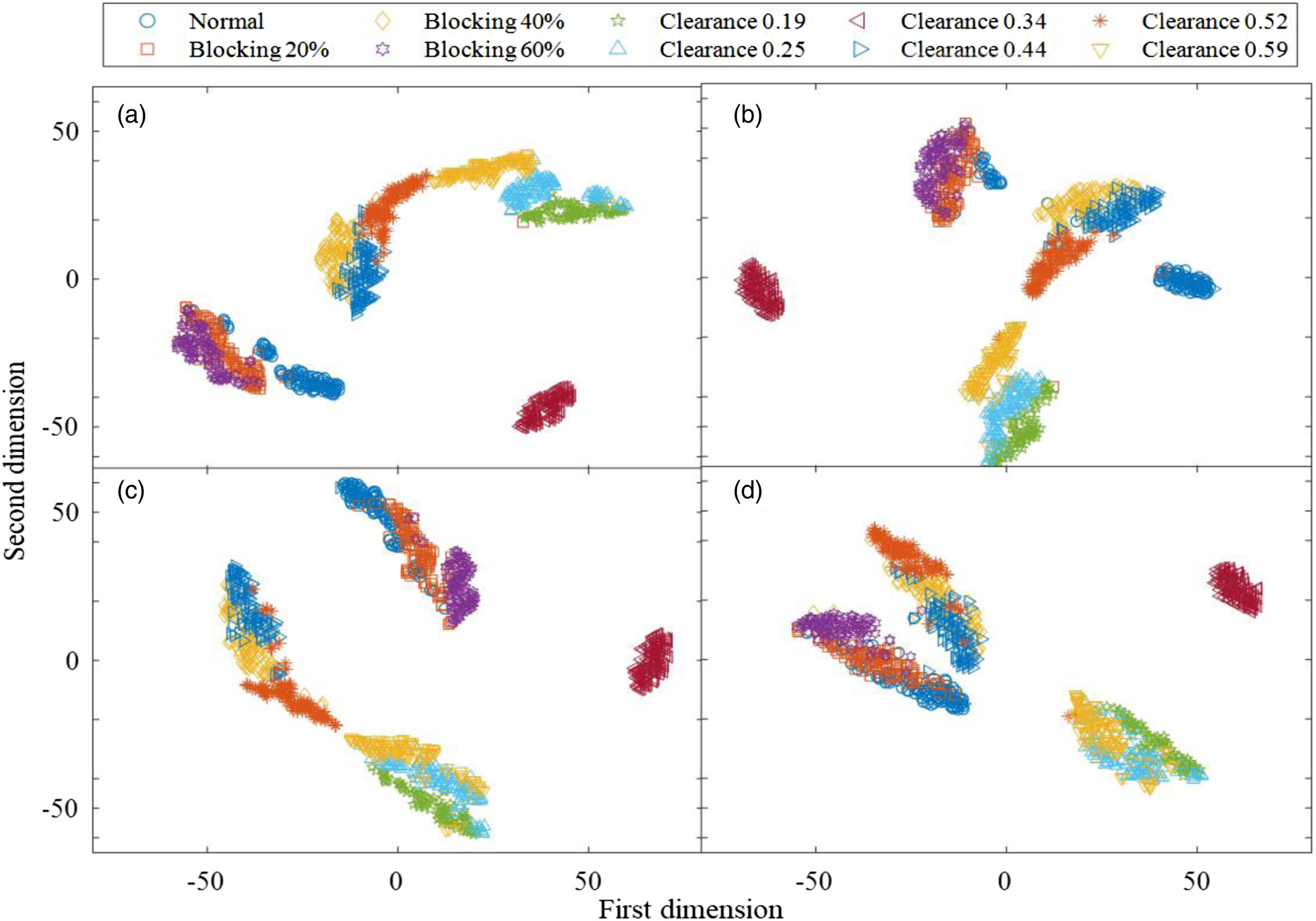
Result analysis of the proposed method
The proposed method based on RCMFE and FASVM was applied to recognize the states of the diesel engine with the above collected vibration data, in which RCMFE was calculated to mine the working states pattern information of the diesel engine and FASVM was used to recognize the working states of diesel engine. All 50 samples of each working state were respectively set into training samples sets and testing samples sets. To illustrate the performance of RCMFE, MFE, MSE, and RCMSE were compared, and their recognition rates are shown in Figure 9. Recognition result of the different methods: (a) the proposed method based on RCMFE and FASVM; (b) the method based on MFE and FASVM; (c) the method based on RCMSE and FASVM; and (d) the method based on MSE and FASVM.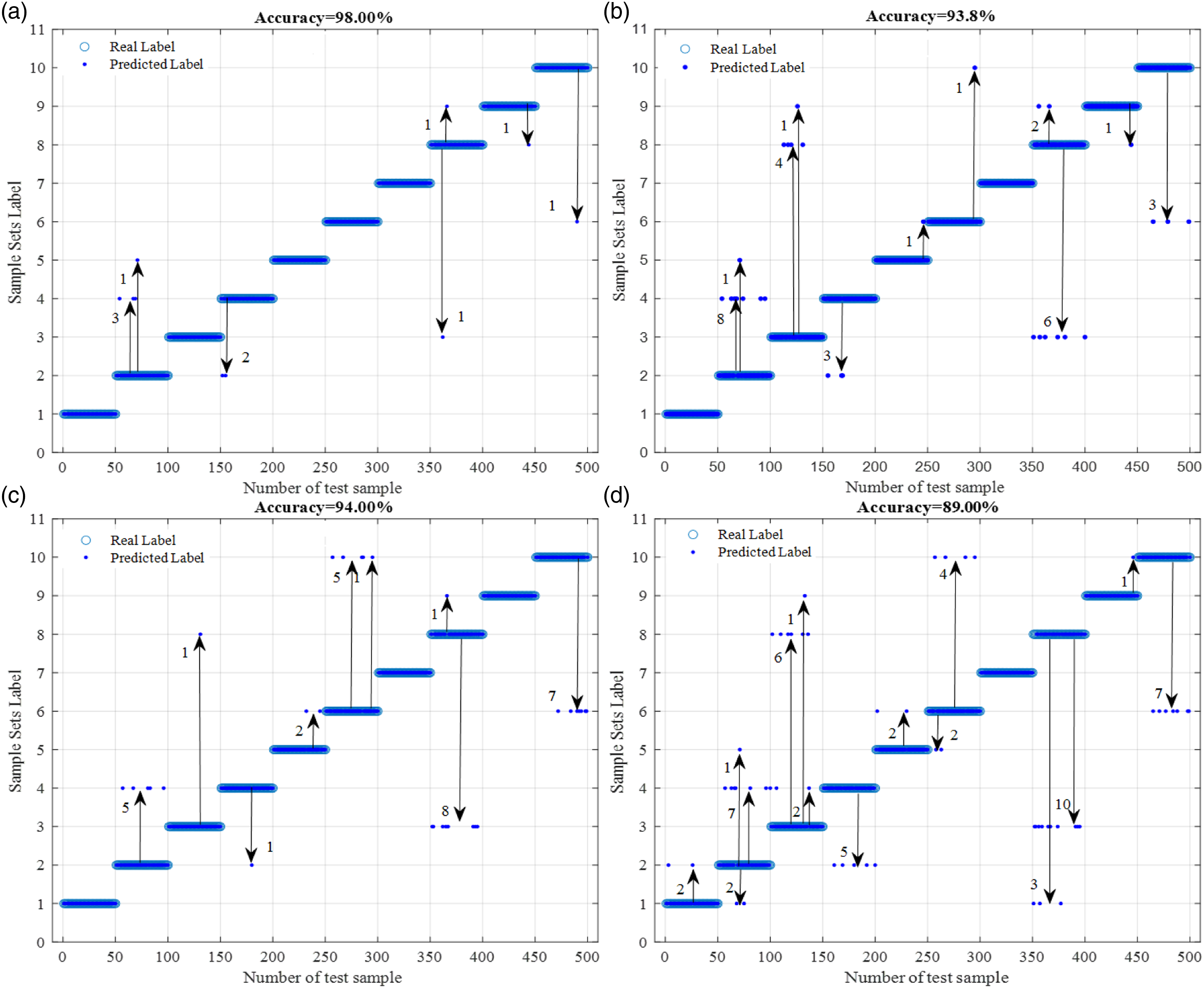
In Figure 9, the proposed method based on RCMFE and FASVM has the best performance on the fault recognition of the diesel engine, comparing the methods based on RCMSE-FASVM, MSE-FASVM, and MFE-FASVM, and its accuracy recognition rate reaches 98%.
In Figure 9(a), a little number of samples of each state are recognized as other states by the method based on RCMFE and FASVM and there is little misclassification between the different fault types or the different degrees of fault, all the samples under the normal state is correctly recognized. As shown in Figure 9(b) and (c), the methods based on MFE-FASVM and RCMSE-FASVM have a close performance on fault recognition and their recognition is 93.80 and 94.00%, respectively.
Their recognition results of total samples indicate that none of the samples under normal state are recognized as other states, but more fault samples are misclassified as other fault states. As illustrated in Figure 9(d), the method based on MSE and FASVM has the worst performance on the fault recognition of the diesel engine, and its recognition rate is 89%; by this method, most of the samples, including normal and fault states are misclassified. The above experiment analysis results indicate that the superiority of recognition performance of the proposed method based on RCMFE and FASVM has been validated. Compared with the methods based on RCMSE-FASVM, MFE-FASVM, and MSE-FASVM, the method based on RCMFE and FASVM can correctly and effectively recognize the working states of the diesel engine.
Comparison of the different methods for extracting fault features
To further illustrate the superiority of the proposed method based on RCMFE and FASVM, comparing with MFE-FASVM, RCMSE-FASVM, and MSE-FASVM, RCMFEs, MFEs, RCMSEs, and MSEs with different time scales are used to feature the fault pattern information of vibration signal of each state of diesel engines and input to the FASVM parameter-adaptive multi-classifier for multi-fault state recognition of diesel engine. The recognition results are exhibited in Figure 10, in which both the number of training samples and testing samples are 50 and the number of input feature values varies from 1 to 20. Recognition rate comparison of the methods based on RCMFE, MFE, RCMSE, MSE, and FASVM under the different number of feature values.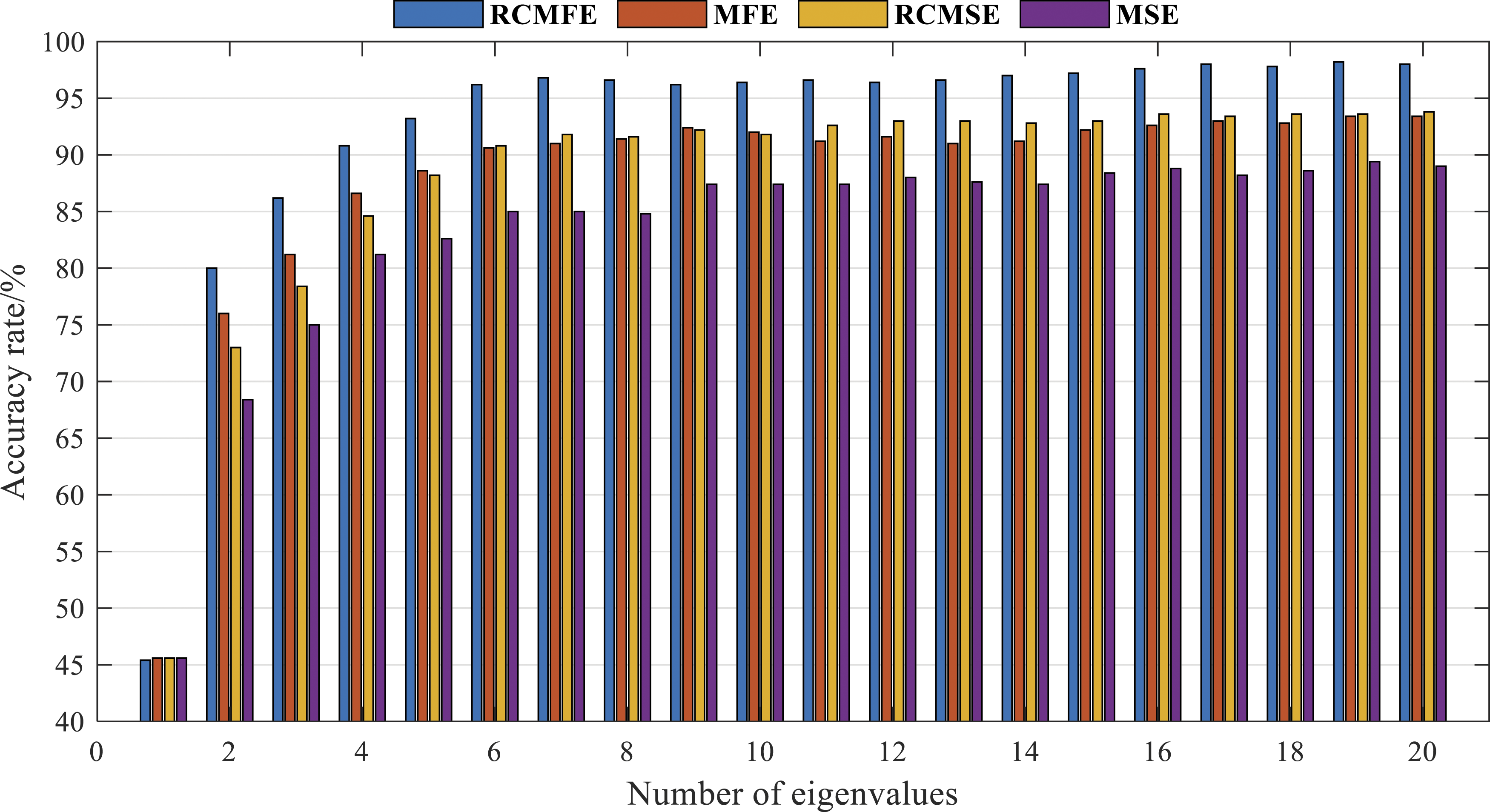
First, under the determined number of training samples, with the increase in the number of input eigenvalues, the accuracy recognition rate of all the methods based on RCMFE, MFE, RCMSE, and MSE increases (when the number of the input eigenvalues is smaller than nine), and tend to be a constant with slight fluctuation, which indicates the entropies of RCMFE, MFE, RCMSE, and MSE under different time scale have different performance on representing the fault patter information of vibration signal of diesel engine. Second, when the number of input eigenvalues is one, all the recognition rates of the recognition methods based on RCMFE, MFE, RCMSE, and MSE have the worst performance and mean about 45%; when the number of input eigenvalues is larger than one, it is obvious that the recognition rate of the recognition method based on RCMFE tends to be 98%, which are always larger than that of the recognition methods based on MFE and RCMSE. In particular, when time scale factor
To further illustrate the superiority of the proposed method based on RCMFE-FASVM, comparing with MFE-FASVM, RCMSE-FASVM, and MSE-FASVM, RCMFEs, MFEs, RCMSEs, and MSE under twenties time scale are used to feature the pattern information of vibration signal of each state of diesel engine and input to the FASVM parameter-adaptive multi-classifier for multi-fault recognition of diesel engine. The recognition results are exhibited in Figure 11, in which the number of testing samples is 50, and the number of training samples varies from 5 to 50 for each kind of diesel engine states. The recognition results are shown in Figure 11. Recognition rate comparison of the methods based on RCMFE, MFE, RCMSE, MSE, and FASVM under the different number of training samples.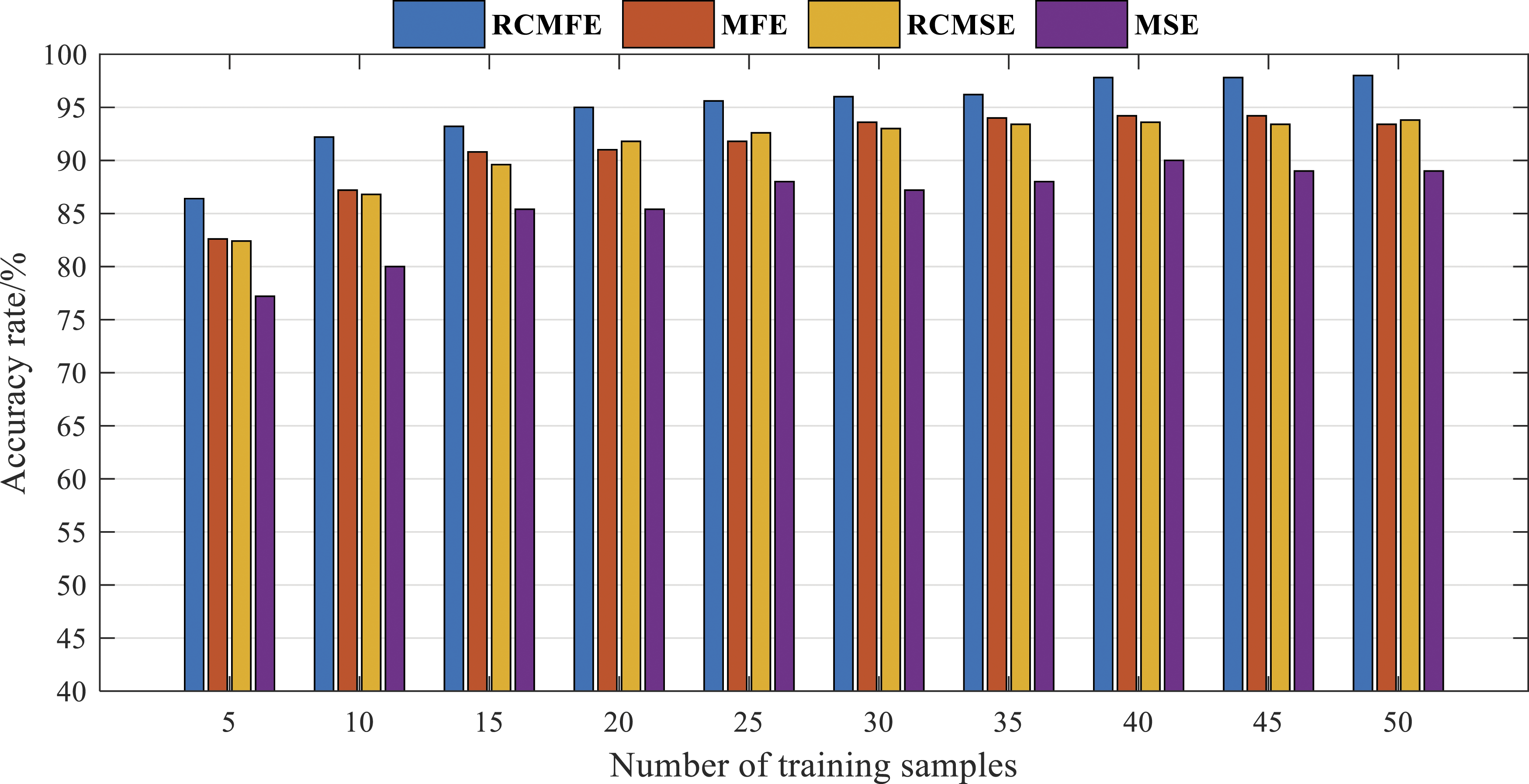
First, with the increase in the number of training samples, all the recognition rates of the methods based on RCMFE, MFE, RCMSE, and MSE tend to be constant. Second, when the number of training samples is determined, the proposed recognition method based on RCMFE and FASVM has the best recognition performance, and its recognition rate is larger than that of the recognition methods based on MFE-FASVM and RCMSE-FASVM, which are larger than that of the recognition methods based on MSE-FASVM. Third, with the increase in the number of training samples, the recognition rate of the method based on RCMFE is always larger than that of the methods based on MFE and RCMSE and tends to be about 98%. And, when the number of training samples varies, the recognition rates of the methods based on MFE and RCMSE fluctuate significantly, which indicates both the methods, as one promoted method of MSE, have different performance on representing the fault pattern information of vibration signal of diesel engine. The recognition method based MSE has the worst performance of fault recognition of vibration signal of diesel engine. Finally, the above analysis validates that the proposed method based on RCMFE and FASVM has the best recognition performance, compared with other methods based on MFE-FASVM, RCMSE-FASVM, and MSE-FASVM. When the number of training samples is suitable, the recognition rate of the proposed method based on RCMFE-FASVM tends to be 98%.
Next, to generally illustrate the superiority of the method based on RCMFE and FASVM, the comparing analysis is further conducted. The recognition results are illustrated in Figure 12, in which the number of training samples under each state varies from 5 to 50, and the number of the input features changes from 2 to 20. First, with the change in the number of input features and training samples, the recognition rate of all the methods, that is, RCMFE-FASVM, MFE-FASVM, RCMSE-FASVM, and MSE-FASVM increases. In particular, the best recognition rate of the RCMFE-FASVM-based method reaches 98.2%, which is larger than that of the MFE-FASVM method and RCMSE-FASVM-based method, tending to be about 94%. The MSE-FASVM-based method expresses the worst recognition result, which tends to be 90%. Second, with the increase in the number of input features and training samples, the recognition rate of the RCMFE and FASVM-based method fluctuates slightly and increases gradually. By contrast, the methods based on RCMSE-FASVM, MFE-FASVM, and MSE-FASVM fluctuate significantly and increase discontinuously. Finally, the above analysis indicates that due to the superiority of RCMFE, the RCMFE-FASVM-based method has been to be effective, and the number of input features and training samples has a smaller influence on the RCMFE-FASVM-based method, compared with the methods based on MFE-FASVM and RCMSE-FASVM and MSE-FASVM. To effectively identify the states of the diesel engine, the number of input features and training samples should be determined between [10, 20] and [35 50]. When the number of input features and training samples are suitable, its recognition rate tends to be about 98%. Recognition rates under different number of input features and training samples: (a) RCMFE-FASVM; (b) MFE-FASVM; (c) RCMSE-FASVM; and (d) MSE-FASVM.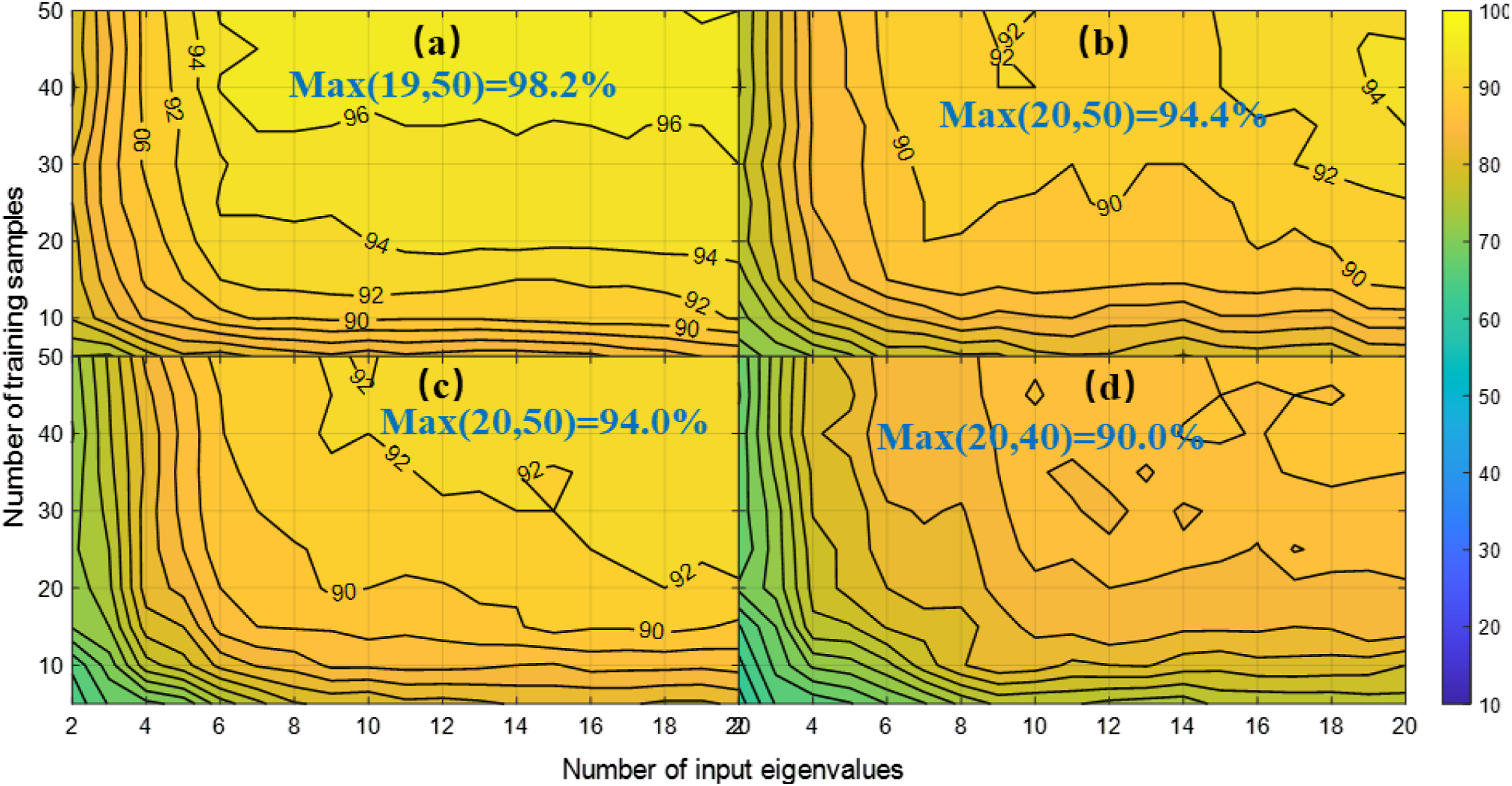
Comparison of the different classification methods
For illustrating the superiority of the multi-classifier FASVM in the proposed method, the above RCMFEs are also input to other classifiers, that is, Extreme Learning Machine (ELM), k-Nearest Neighbors (KNN), and Random Forest (RF). The results are shown in Figure 13 and Figure 14, where the influence of the number of input eigenvalues and training samples on the fault identification performance of the above four classifiers are expressed. Comparing results of RCMFE and four classifiers under different numbers of eigenvalues. Comparing results of RCMFE and four classifiers under different numbers of training samples.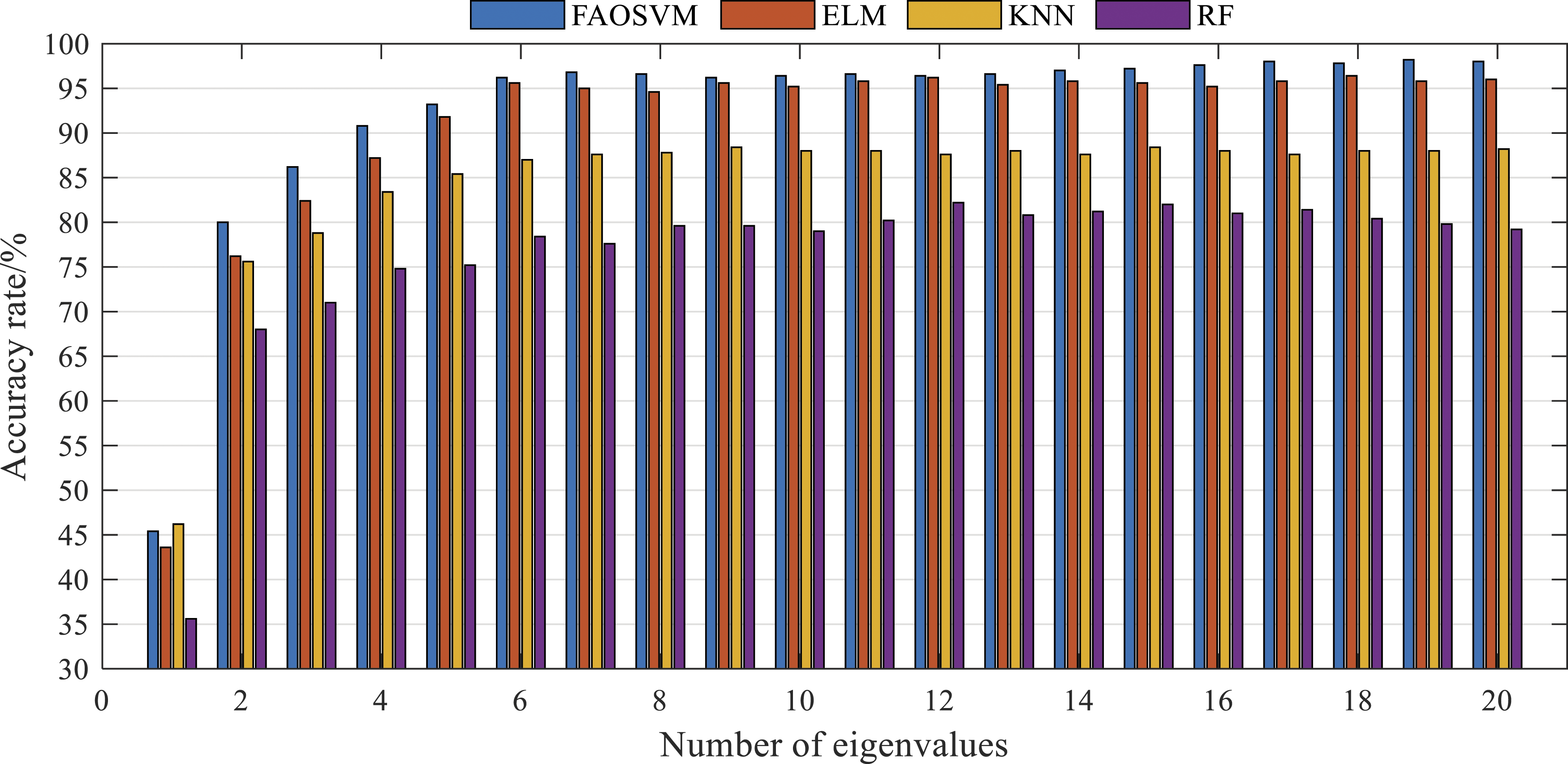
As shown in Figure 13, RCMFEs are taken as the input features, both the number of training samples and test samples are fifty for four multi-classifiers, and the number of input features varies from 1 to 20. First, with the increase of the number of input eigenvalues, the recognition rates of four classifiers, FASVM, ELM, KNN, and RF, increase, and fluctuate slightly when the number of input features varies from 9 to 16, and tend to be a constant. This indicates that the recognition performance of four classifiers can be promoted with the increase of the number of input features and not all the input features can be suitable for representing the fault pattern information of diesel engine. Second, when the number of input features is larger than two, the recognition rates of the proposed method based on FASVM are always larger than that of the methods based on ELM, KNN, and RF, whose recognition rates show ELM > KNN > RF. Finally, the best recognition performance of the proposed method based on FASVM has been validated by the above analysis. When the number of the input eigenvalues varies, the recognition rates of the proposed method based on FASVM always retain a better performance, and with the increase of the number of the input features, that tends to be 98.00%, which is larger than that of other methods, that is,. ELM, KNN, and RF.
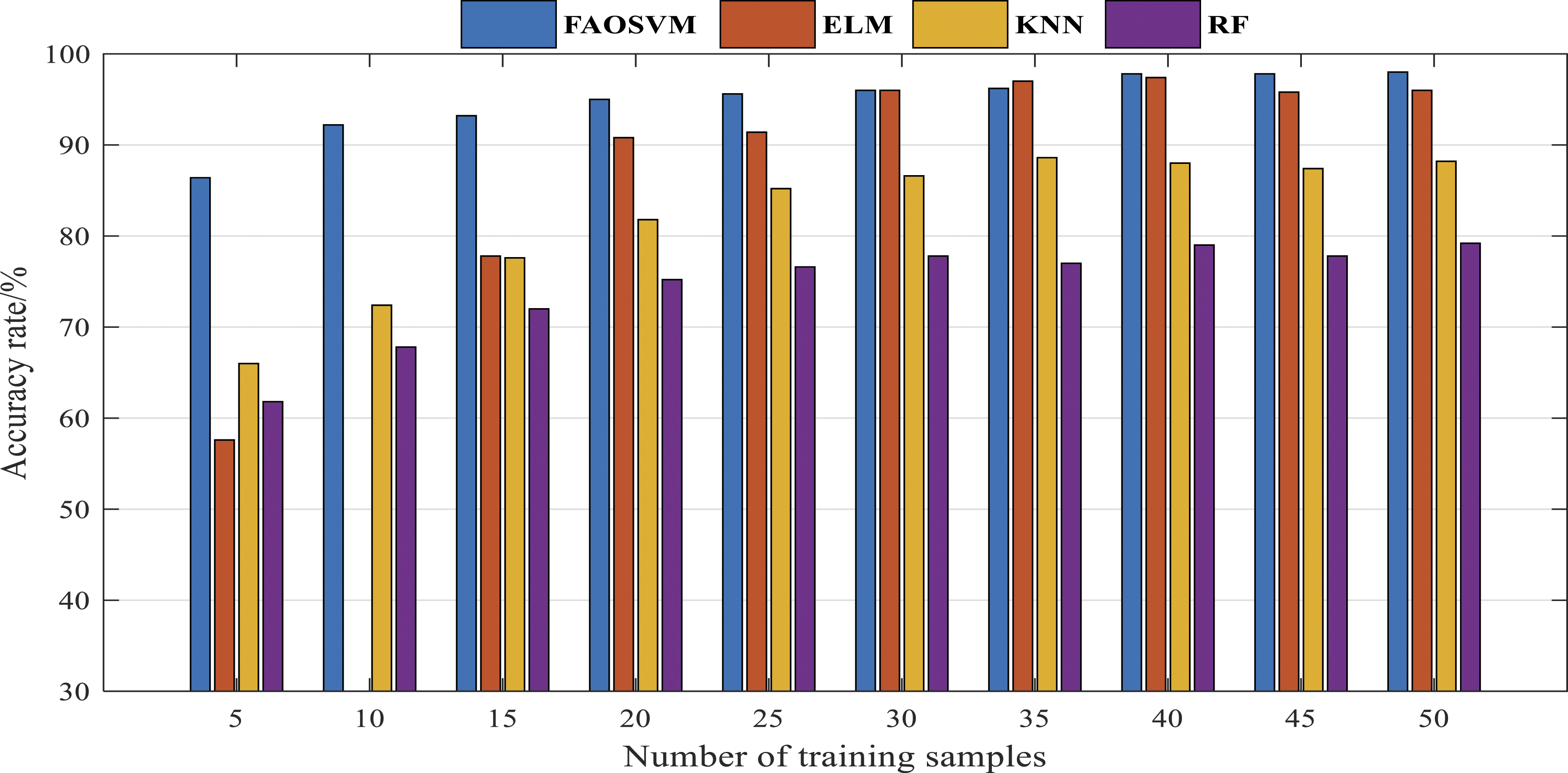
As shown in Figure 14, RCMFEs are also taken as the input features, the number of test samples and input features are separately 50 and 20 for the above four multi-classifiers, and the number of training samples varies from 5 to 50 for each kind of diesel engine states.
First, with the increase in the number of training samples, the recognition rates of the proposed method based on FASVM increase, tend to be constant, and the recognition rates of the methods based on ELM, KNN, and RF increase and decrease when the number of training samples is larger than 35, which expresses the more stability of the proposed method based on FASVM, compared with other three methods. Second, when the number of training samples increases, the recognition rates of the proposed fault recognition method based on FASVM, almost are larger than that of those methods, based on ELM, KNN, and RF, which express greater diversity under the smaller number of training samples. Finally, the above analysis also validates the superiority of the proposed fault recognition method based on RCMFE and FASVM. When the number of training samples varies, it has little influence on the recognition rate of the method based on RCMFE and FASVM, compared with that of those methods based on RCMFE-ELM, RCMFE-KNN, and RCMFE-RF. When the number of training samples is larger than a suitable number, the recognition rates of the method based on FASVM, tend to be constant at 98.00%, which is much larger than that of those recognition methods based on ELM, KNN, and RF.
Next, to generally illustrate the superiority of the method based on RCMFE and FASVM, the comparing analysis is further conducted. The recognition results are illustrated in Figure 15, in which the number of training samples under each state varies from 5 to 50, and the number of the input features changes from 2 to 20. RCMFE and different classifiers: (a) RCMFE-FASVM; (b) RCMFE-ELM; (c)RCMFE-KNN; and (d) RCMFE-RF.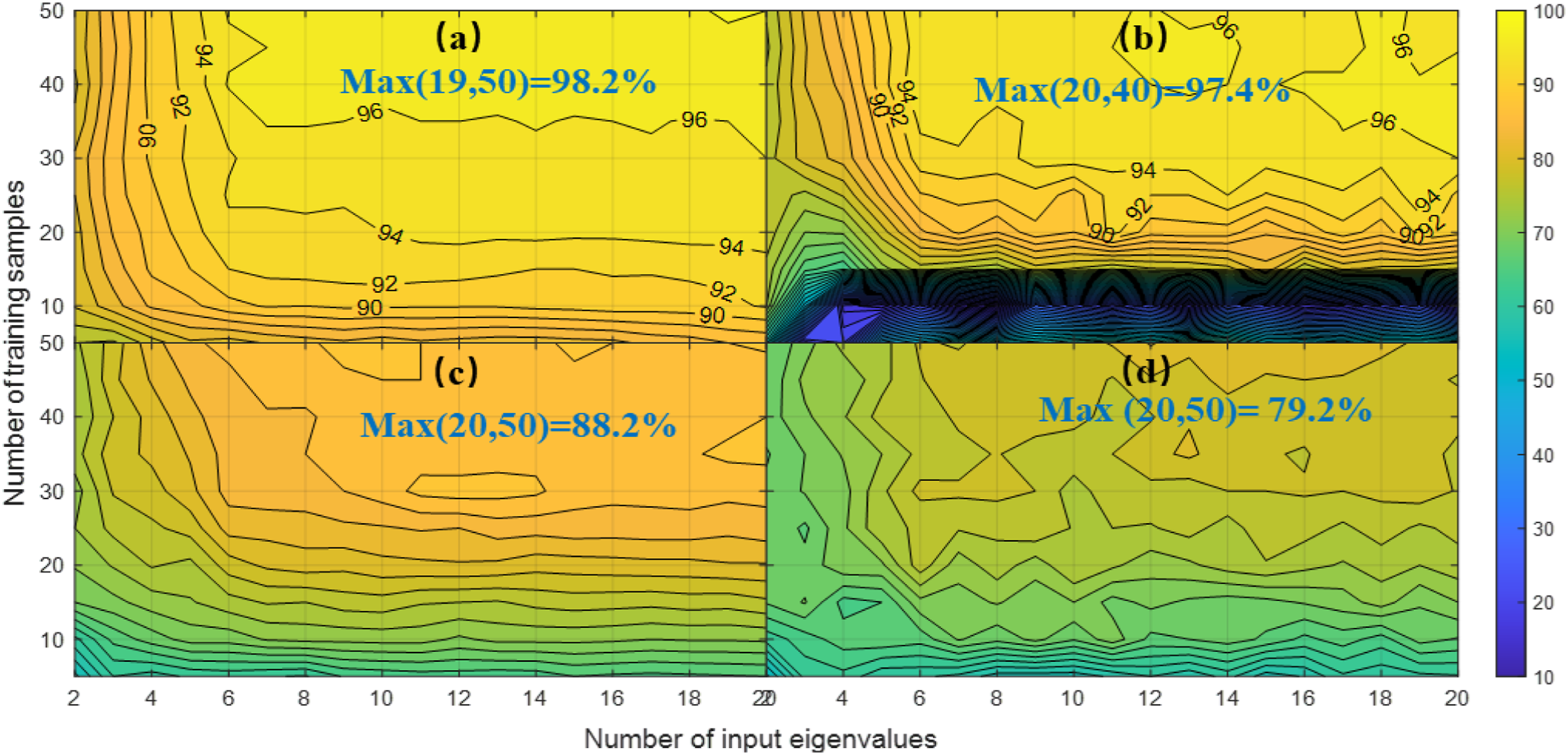
First, with the change in the number of input features and training samples, the recognition rates of all the methods, that is, RCMFE-FASVM, RCMFE-ELM, RCMFE-RF, and RCMFE-KNN increase. In particular, the best recognition rates of those methods indicate that RCMFE-FASVM (98.2%)> RCMFE-ELM (97.4%)> RCMFE-KNN (88.2%)> RCMFE-RF (79.2%). Second, with the increase in the number of input features and training samples, compared with the recognition rate of the RCMFE and FASVM-based method, the methods based on RCMFE-ELM, RCMFE-KNN, and RCMFE-RF fluctuate significantly and increase discontinuously, which means that the RCMFE-FASVM-based method expressed the strong robustness and stability. Finally, the above analysis indicates that due to the SVM classifier’s superiority in the recognition task of small features and samples, the RCMFE-FASVM-based method has been to be effective in the experimental analysis of diesel engine, and are less influenced by the number of input features and training samples have smaller influence, compared with the methods based on RCMFE-ELM, RCMFE-KNN, and RCMFE-RF.
Conclusion
In this paper, the fault features extracted from vibration signals of power machinery are quantified by RCMFE, and the fault patterns are recognized by FASVM. The proposed algorithm is applied to a fault test of a diesel engine. The main conclusions are summarized as follows: (1) The RCMFE in multiple time scales can effectively reflect and mine the fault pattern information of vibration signal of diesel engine. Compared with commonly used MFE, RCMSE, and MSE, the proposed RCMFE shows the lowest fluctuation in a specific fault pattern and the greatest distinctions between multiple fault patterns. (2) The proposed method based on RCMFE-FASVM, has better recognition performance and more stability than the used existing methods, that is, MFE-FASVM, MSE-FASVM, and RCMSE-FASVM. When the number of input features and training samples are suitable, the recognition rate of the proposed method can reach 98.2% which is larger than that of the method based on MFE-FASVM, RCMSE-FASVM, and MSE-FASVM whose recognition rates are 93.8, 94, and 89%. (3) The comparison experiment data analysis also indicates that compared with the used existing method, that is, RCMFE-ELM, RCMFE-KNN, and RCMFE-RF, the proposed method based on RCMFE-FASVM expressed the best recognition performance with more stability. When the number of input features and training samples are suitable, the recognition rate of the proposed method can reach 98.2% which is larger than that of the method based on RCMFE-ELM, RCMFE-KNN, and RCMFE-RF whose recognition rates are 97.4, 88.2, and 79.2%. (4) To effectively recognize the fault states of the diesel engine, the number of input features and training samples should vary from 8 to 20 and from 35 to 50.
The entropy methods have not been commonly applied to extract the fault features of diesel engines and other specific equipment. Further research could be conducted, that is, further improved methods combined the working cycle of diesel engine, the multi-frequency components, and multiple isomorphic- or heterogeneous-information fusion.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was funded by the Open Project of State Key Laboratory of Engine Reliability in China (SKLER:202009).