
Abstract
In this study, the design of adaptive backstepping sliding mode control (ABSMC) has been developed for vibration suppression of earth-quaked building supported by magneto-rheological (MR) damper. The control and adaptive laws developed based on ABSMC methodology has been established according to stability analysis based on Lyupunov theorem. A Single degree of freedom (SDOF) building system has been considered and the earthquake acceleration data used in performance analysis of the proposed controller is based on El Centro Imperial Valley Earthquake. The ABSMC has been compared to classical sliding mode control in terms of vibration suppression in the controlled system subjected to earthquake. The performance of proposed controller has been assessed via computer simulation, which showed its effectiveness to stabilize the building against earthquake vibration and the boundness of estimated stiffness and viscosity coefficients.
Keywords
Introduction
Earthquakes are responsible for the destruction and severe damage to buildings and structures because of their peak accelerations. 1 They are one of the most destructive natural hazards that cause great loss of life (10,000 people die each year due to earthquakes). In Algeria, for example, the EL-Asnam earthquake of 10 October 1980 with a magnitude of 7.2 destroyed at least 25,000 housing units and made 300,000 people homeless, while the main shock had killed about 2500 peoples. 2 Over the past few decades, safety of structural systems against earthquake motions is one of the most important challenges in the life cycle of a building. Therefore, the control of structural vibration mitigation has attracted several researchers from theoretical and experimental side. 3
A passive control system consists of devices attached to a structure without requiring an external power source to operate with limited control performance. This technology is dedicated to reinforce or modify the stiffness and damping of building structure. On the other hand, the active control system requires large external power source. They show better performance than passive systems, but on the price of reliability and cost. Semi-active control systems are class of active control systems with small external energy requirements which can in real-time tracked the motion of structure to develop the control forces guarantying the structure stability. Recently, many control algorithms and semi-active devices have been investigated for earthquake hazard mitigation especially magneto-rheological (MR) dampers due to their numerous advantages. The MR dampers are smart devices with synthetic fluids changing their viscosity from liquid to semi-solid state in milliseconds if an electric or magnetic field is applied, low-power requirements, mechanical simplicity, low cost, high dynamic range, and very fast excellent control effect responses. 2
The control strategies applied to control MR dampers for structural vibration mitigation are ranged in two classes. The first one is the classical category which requires a mathematical model based on Lyapunov stability. 3 The second one is the intelligent category which does not require a mathematical model of the system. 4 Another category called a hybrid control is the combination of the tow precedents categories. 5
Many researchers have presented different control strategies to address the vibration control problem in structures suffering from earthquakes. The following researches interviews the recent control strategies designed to mitigate the impact of vibration on earth-quaked systems.
Zizouni et al. proposed a robust Linear Quadratic Regulator (LQR) for semi-active control of three-story structure supported by MR damper. The control design is devoted to both suppressing the seismic vibration and minimizing the input energy of the MR damper. 2 In Ref. 1, Çetin et al. designed an adaptive controller for vibration suppression of structural system against earthquake excitation and wind loading based on a semi-active MR damper. The unmeasurable internal state variables are estimated using nonlinear observer. Royel et al. developed a nonlinear control design based on second-order sliding mode control to inhibit the external earthquakes or dynamic loadings for smart structures, which is integrated with MR fluid damper. 6 In Ref. 7, Zizouni et al. neural network controller to mitigate the vibrations of 3-story scaled structure. The control methodology is based on linear quadratic (LQ) control for actuating the MR damper. A clipped optimal algorithm is combined with the proposed controller to adapt the control voltage fed to the MR damper. In Ref. 8, Guclu has combined robust sliding mode control (SMC) and proportional integral derivative controller for active-seismic control of multi-degree-of-freedom structural system against earthquakes to suppress the building vibrations. Khalatbarisoltani et al. proposed reinforcement learning-based controller for active structural control systems subjected to seismic uncertainties. The control methodology is based on online tuning the gain‐scheduling PD fuzzy controller. A state predictor is combined with proposed controller to solve the time delay problem. 9 Chen and Lai have combined a transfer system with a modern control strategy for shaking tables in order to mimicking the responses of high-rise buildings subjected to earthquakes. Three nonlinear controllers and three linear controllers are designed and synthesized to verify the feasibility and applicability of the proposed strategy. 10 In Ref. 11, Afkham and Ehteram have deigned sliding mode control for nonlinear-modeled buildings in the presence of earthquakes. The proposed controller could significantly reduce the floor displacements of building under earthquakes. Schlacher et al. presented a class of a hybrid control systems for earth-quaked high-raised buildings based on passive base isolation supported by active damper. The control law has been designed to solve the disturbance decoupling problem by approximation. The stability of controlled system has proven based on Liypunov theory and dissipative systems to yield robust control against seismic vibration. 12 Chang and Sung presented a neuro-control algorithm based on structural modal energy for a 3-story nonlinear building supplied with active mass damper to suppress the earthquake vibration. The control algorithm showed more effectiveness in reducing the structural response and modal energy as compared to non-controlled response and a multilayer perceptron. 13 In Ref. 14, Shan et al. proposed model reference adaptive control to reduce the effect of earthquake to excited structures. The adaptive control law is developed based on backstepping theory and the stability of controlled system was analyzed considering a little prior knowledge of structural model and parametric effects due to actuator saturation and the switching delay. In Ref. 15, Alli and Yakut have designed fuzzy sliding-mode control (FSMC) for seismic isolation of 8-story shear building excited by earthquake. The FSMC could remove the chattering effect without losing the robustness against parametric uncertainties, modeling inaccuracies and varying dynamic loads. In Ref. 16, A. Rayegani and G. Nouri have investigated the performance of MR damper to prevent seismic pounding in isolated buildings with different gap distances. For each gap distance, the fuzzy logic control of MR damper has been optimized to prevent pounding and to improve the behavior of structure as compared to isolated pounded building. In Ref. 17, Li et al. presented an adaptive model reference sliding model control design to suppress the vibrations of a multi-degree-of freedom nonlinear structure supported with active-mass damper subjected to earthquake excitation. A modified unscented Kalman filter is developed to adaptively identify the unknown states and parameters necessary for control forces. Yao et al. have applied a semi-active control based on MR damper to a vehicle suspension system. Firstly, MR damper has been designed and tested in flow mode and a Bouc-Wen model was adopted to characterize the performance of designed damper. The coefficients of the damper have been optimized numerically and experimentally. The semi-active control strategy together with MR damper has been applied to vibration control of suspension vehicle. 18 In Ref. 19, Saidi A et al. proposed an adaptive sliding mode control for vibration mitigation of scaled three-story building structure supported by MR damper fixed at ground floor. A comparison study has been conducted between controlled and uncontrolled structures subjected to the same excitation of earthquake. In Ref. 20, Yuksel H. and Nurkan Y. have presented adaptive backstepping control design for vibration suppression of uncertain nine-story building structure. The building is supported by tuned mass damper established on the top floor. The stability of controlled building model is guaranteed and the effectiveness of controller has been verified. In Ref. 21, Fali L et al. presented sliding mode control design based on adaptive gain law for controlling the vibration of three-story scaled structure subjected to earthquake excitation. The structure is equipped with semi-active device (MR damper) which is fed by required force control to suppress unwanted vibrations of shaking structure. A Clipped optimal algorithm is applied for commanding the current driver.
The Variable Structure Control with Sliding Mode Control (SMC) was developed by Emelyanov and his team assistances in the early 1950’s. The SMC methodology is an effective tools which it aims to design a controller for a nonlinear, complex, high order and time varying systems in the presence of certain or uncertain parameters variations and external disturbances.22,23 The main advantage of the SMC that it is low sensitive for system parameters variations and disturbances which restricted the necessity of exact modeling. 20 The SMC replaces the dynamics of a system by application of a discontinuous control signal that forces the system to slide along a stable manifold known as sliding surface.24,25
The SMC introduces control law which can be distributed into two main parts (equivalent part and switching part). The equivalent part deals with dynamic of the system and sliding surface such as to conduct the trajectory of the states toward the sliding surface. The switching part of control signal is responsible for driving states trajectory to equilibrium point by maintaining the dynamics of the system onto the sliding surface.26,27 In the control action of the SMC, there is undesired phenomena known as chattering, which is caused by the high frequency oscillation of the sliding variable around the sliding surface, and it is one problem in using sliding mode technique. 27
The backstepping control procedure depends on the concept of simplifying the complex nonlinear system by decomposing it into lower orders subsystems.28,29 This is based on the fact that in each equation of the system mathematical model and subsystem, one of the coordinates acts as a virtual, and this coordinate has to appear in an affine way in each equation. 30 It is a nonlinear control method based on the Lyapunov theorem with advantage of design flexibility because of the recursive use of Lyapunov functions. 31 The combination of sliding mode control and backstepping control can simplify the design of backstepping controller, also enhanced the robustness of the controller and the overall system to the undesired external disturbances. 32 In addition, it has been shown that the chattering effect in using SMC is considerably reduced by fusing both SMC and backstepping control.
In the practical applications, the problem with the presence of uncertainty, external disturbances or unwanted vibration is that their bounds cannot be determined precisely. The adaptive control technique is used to adapt the parameters of controller such as to cope with these uncertainties, disturbances or vibration such as to keep the controlled systems within stability margins.33–36
One critical problem with building systems subjected to earthquakes is that their parameters such as spring and viscosity coefficients encounter evitable variations under earthquake vibration. Therefore, one solution to fix this problem is to propose an adaptive control. In order to have the robustness power of sliding mode control and the effectiveness of backstepping control theory, the Adaptive Backstepping Sliding Mode Control (ABSMC) has been proposed for vibration suppression of building supported by MR damper. This is a new control design, which has not been addressed previously. The present work proposed three nonlinear controllers, represented by SMC, BSMC, and ABSMC, to control and guarantee the stability of Earth-quaked building with the assistance of MR damper. The contributions of this study can be highlighted as follows: 1. To solve the problem of vibration control in building, supported by MR damper and subjected to earthquake, by developing new algorithms based on SMC, BSMC, and ABSMC. 2. To prove the asymptotic stability of controlled building in the presence seismic vibration for the three proposed controllers (SMC, BSMC, and ABSMC) such that all errors finally converges to their corresponding zero equilibrium conditions. 3. To show the boundness of estimated viscosity and stiffness coefficients of adaptively-controlled building system. 4. To show the superiority of ABSMC performance as compared to SMC in terms of vibration suppression.
Dynamic model
In this study, the used building structure model is equipped with an MR damper located between the ground and a brace as shown in Figure 1. It has been shown that the control force in this floor is more effective than the control force of MR damper located in the upper floors.
37
This structure is seismically subjected to acceleration Schematic representation of Earth-quaked building supported by MR damper. Note: MR: magneto-rheological.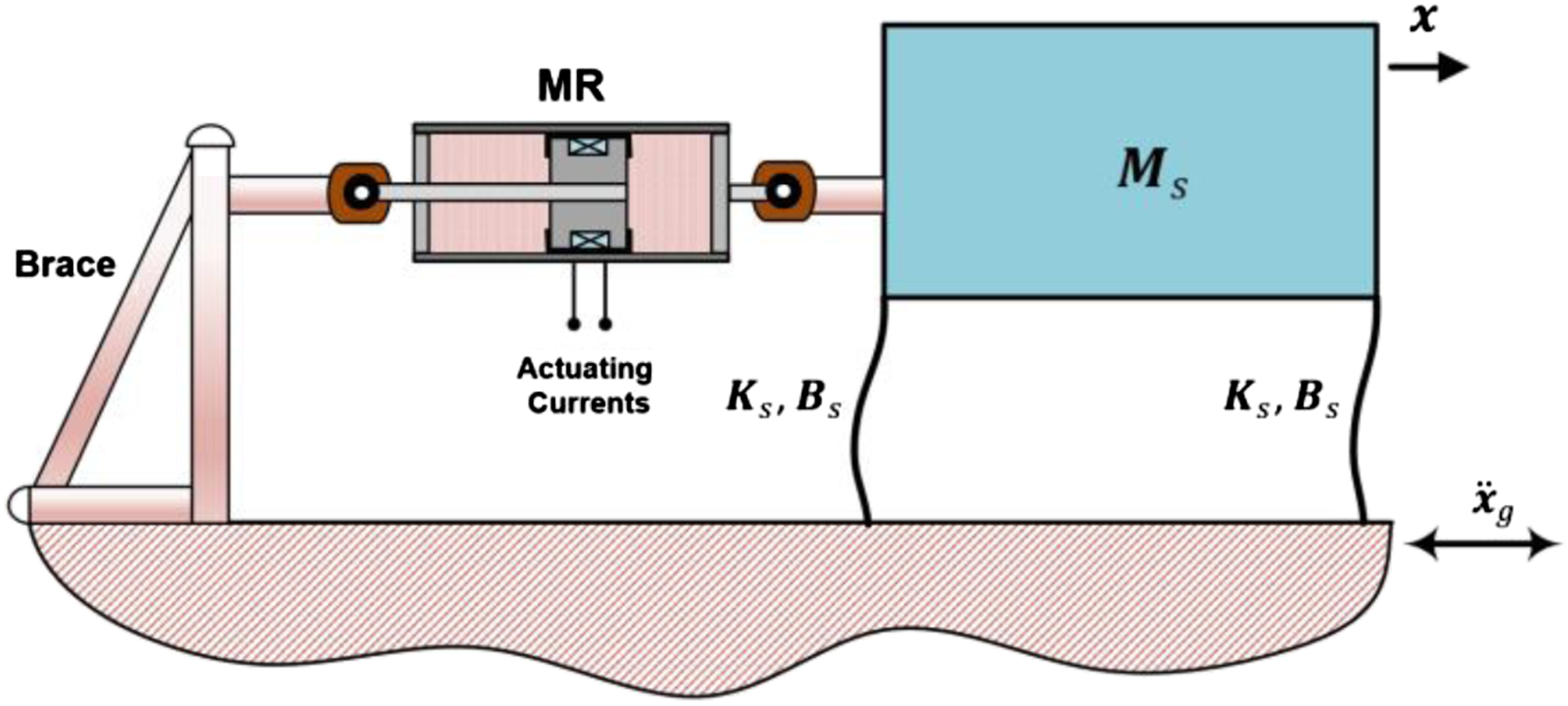
The general equation of dynamic motion for the structural system shown in Figure 1 can be described by

In order to represent equation (1) into state variable form, the state variable

The schematic representation of the MR damper is described in Figure 2. The MR damper consists of conventional damper, whose viscosity is electrically controlled via actuating coil. This coil is excited by an external voltage which is part of controlled signal for this system. The MR damper nonlinear behavior was firstly developed and extended by Bingham model.
38
Then, other researchers has proposed other models of MR damper based on differential equation, which are verified and validated based on experimental setup.39–41 Schematic representation of MR damper.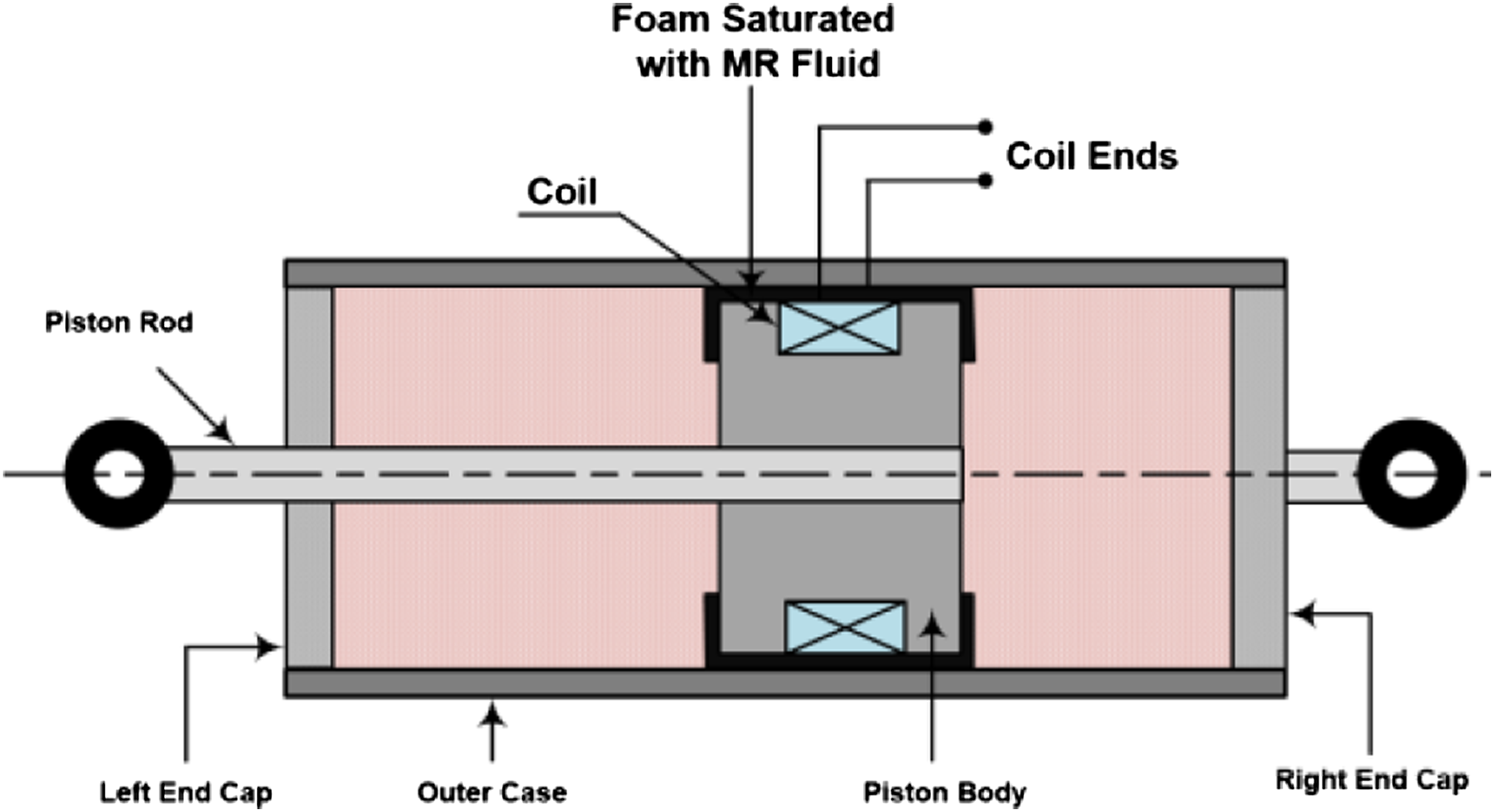
The dynamic properties of this MR device are augmented by Bouc-Wen model, which is shown in Figure 3. Based on Figure 3, the dynamic equations which characterize MR device can be described by42,43 Modified Bouc-Wen model of MR damper.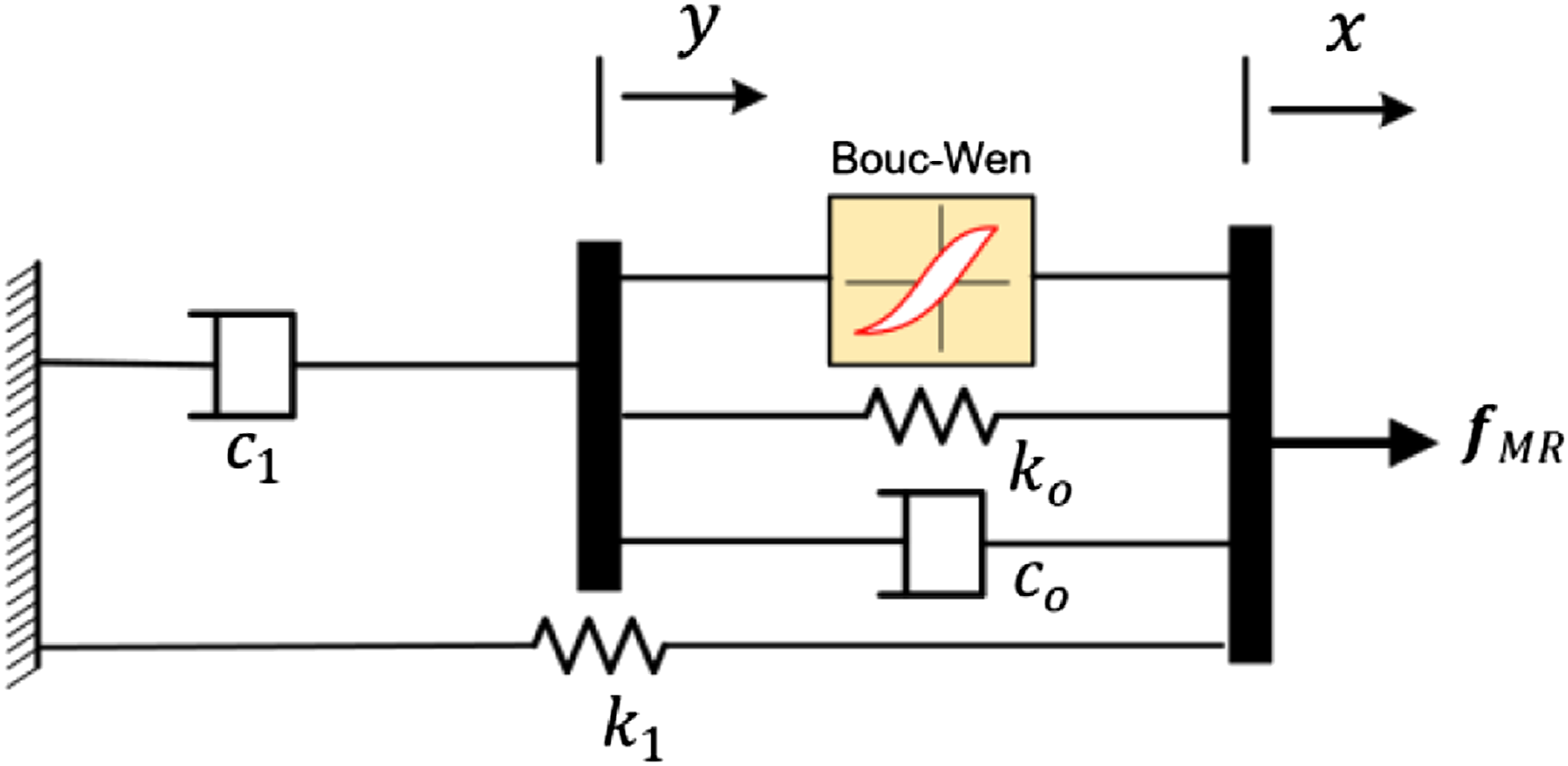





It is worthy to mention that MR devices can change the stiffness of their fluid up to 100 Hz and can operate over a wide range of the ambient temperature, usually from −40°C to +150°C. They have a large yield shear stress routinely between 50–100 kPa for applied magnetic fields of 150–250 kA/m. MR fluids react to external stimulus in a few milliseconds and can be readily controlled by standby batteries with a voltage in range of 12–24 V.
Adaptive backstepping sliding mode control
In this section, the control and adaptive laws are developed based on adaptive backstepping SMC methodology. Firstly, sliding mode control design has to be conducted and then the adaptive backstepping SMC will be established accordingly. In the control design, the actual force
Sliding mode control
Let

In our case,

The sliding surface

Taking the first time derivative of equation (10) to have

Using equations (9) and (11) becomes





Figure 4 shows the schematic diagram of sliding mode controlled building subjected to Seismic Vibration. The figure illustrates the connection of controller with MR damper to be generated the desired force for mitigating the earth vibration. Schematic diagram of sliding mode controlled building subjected to seismic vibration.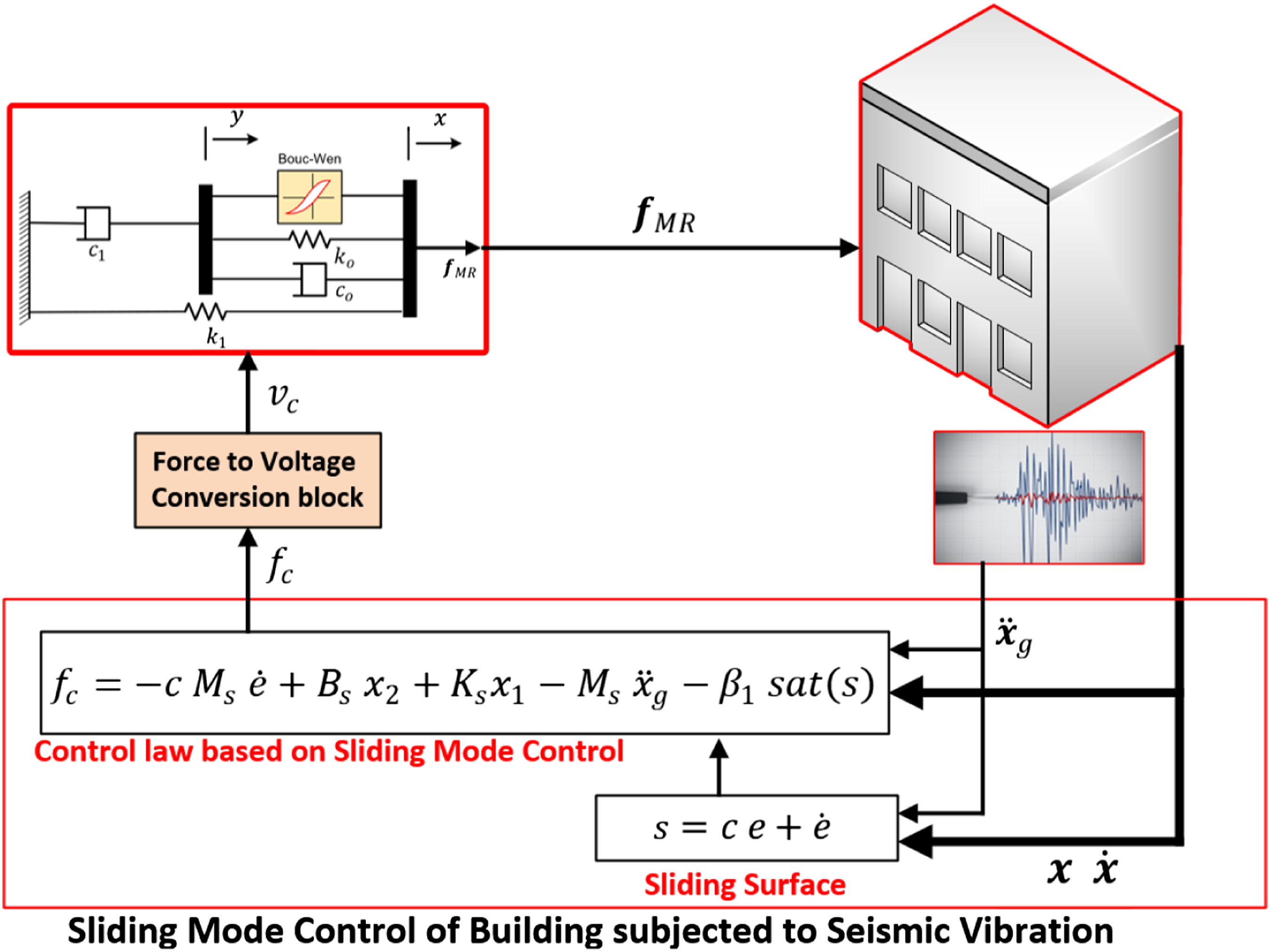
In practical realization of MR-based controlled building structures, the MR coils requires current actuating signal to generate force. Therefore, a driver is required to convert the desired voltage (control signal) into desired current and hence to desired force. Other optimal algorithm is required to control the voltage-to-current converter (driver) via Heavy step function.19,21,33
Stability analysis
The candidate Lyapunov Function (L.F.) can be defined as

The time derivative of L.F. gives

Based on equations (17) and (19) becomes


The

Backstepping sliding mode control
In order to derive the ABSMC control law, the BSMC has to be derived as a first step to design the ABSMC controller. In what follows, the algorithm of BSMC is explained in steps:
The tracking error and its derivative is given respectively as Let Taking the time derivative of L.F. and using equation (23) to have If the variable This indicates that






The deviation of the virtual control Then, using equations (28) and (23) to have After that the dynamics of Based on equation (24), the time derivative of The second L.F. candidate and its time derivative are respectively given by Using equation (30) and (27), one can have In order to have Then If










Adaptive backstepping sliding mode control
In this study, it is assumed that an uncertainty in parameters of vibrated system will arise due to an earthquake. In particular, two uncertainties will be addressed for this application; one uncertainty which concerned to the viscous damping coefficient



Assuming low variation in coefficients

The control law

Using the control law in equation (37), one can get

Using equations (34) and (38) can be rewritten as

In order to guarantee negative definiteness of


Since
The control force developed due to either classical or adaptive backstepping control design cannot directly actuate the MR damper; since this device requires a voltage signal to be operated. Figure 5 shows the controlled earth-quaked structure based on adaptive backstepping control algorithm. Suppression of seismic vibration based on adaptive backstepping control algorithm for earth-quaked structure supported by MR damper.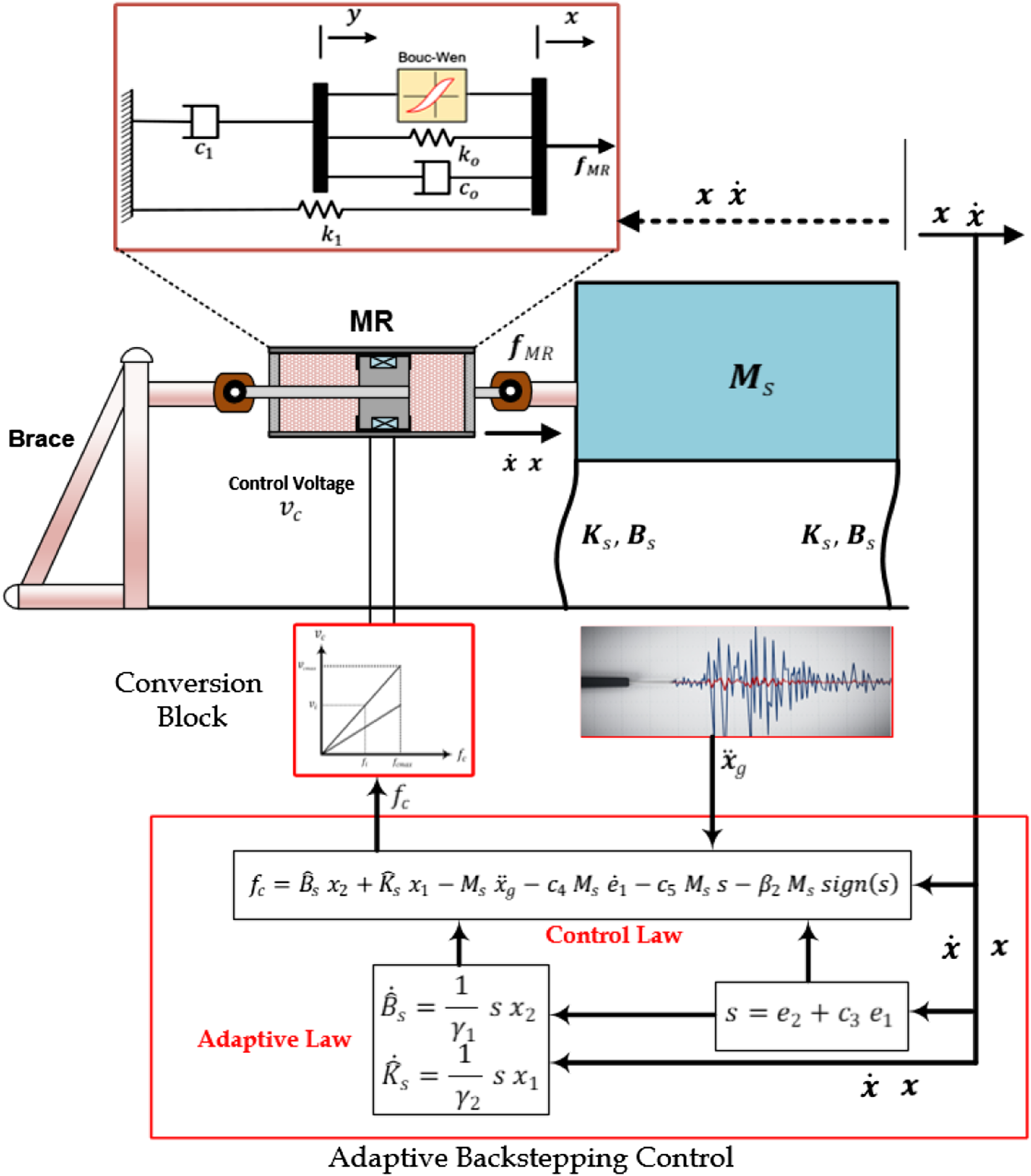
Computer simulation
In this section, the effectiveness of backstepping sliding mode control and adaptive backstepping sliding mode controllers are assessed and compared to each other. The design Parameters for SMC are set to c = 10, k = 1, while the design parameters for ABSMC have the settings:
The data used in this study are related to earthquake happened in May 1940 at Imperial Valley (Brawley).
45
Total damage has been estimated at about $6 million. The magnitude was 7.1. The behavior of earthquake has been recorded and displayed in Figure 6. El Centro 1940 Imperial Valley earthquake.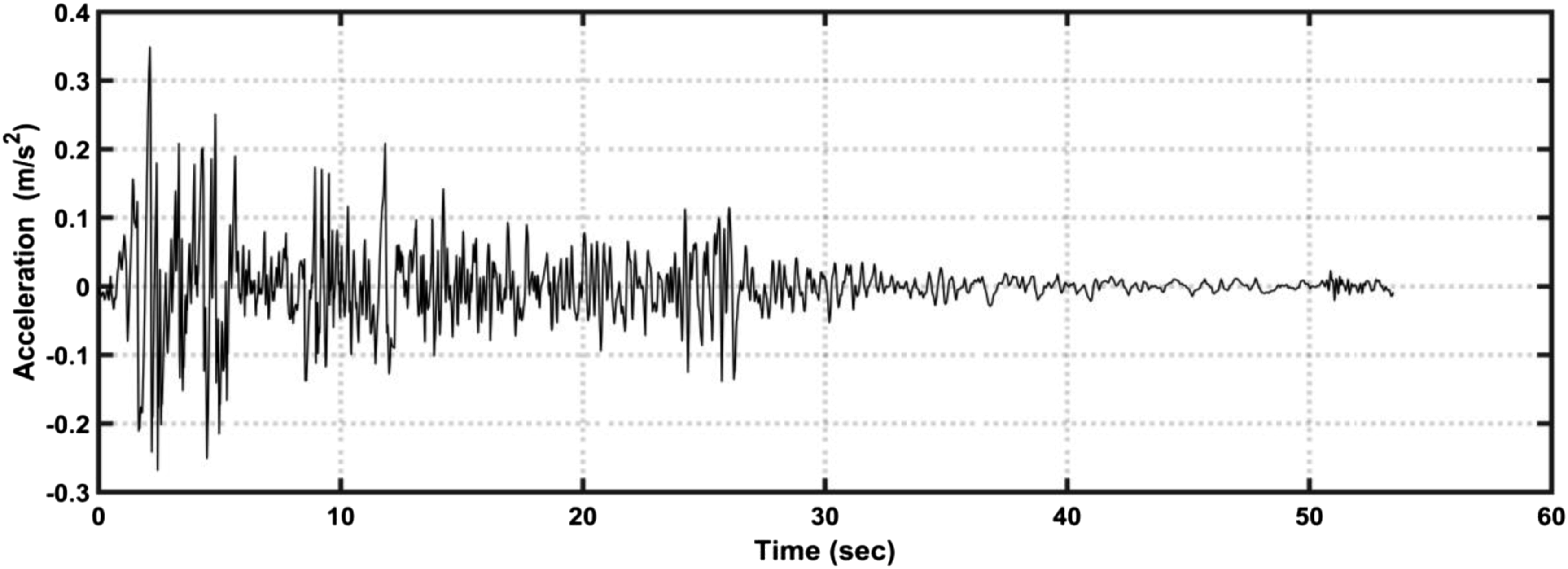
The dynamic responses of displacement of building system under earthquake based on sliding mode control and ABSMC is shown in Figure 7. As compared to uncontrolled system, it is evident from the figure that the SMC and ABSMC could reduce the effect of earthquake vibration with the presence of MR damper. However, the figure shows that the ABSMC could give less magnitude of vibration for controlled and earth-quaked building than that based on SMC. Displacement responses of the earth-quaked building Based on SMC and ABSMC. Note: ABSMC: adaptive backstepping sliding mode control; SMC: sliding mode control.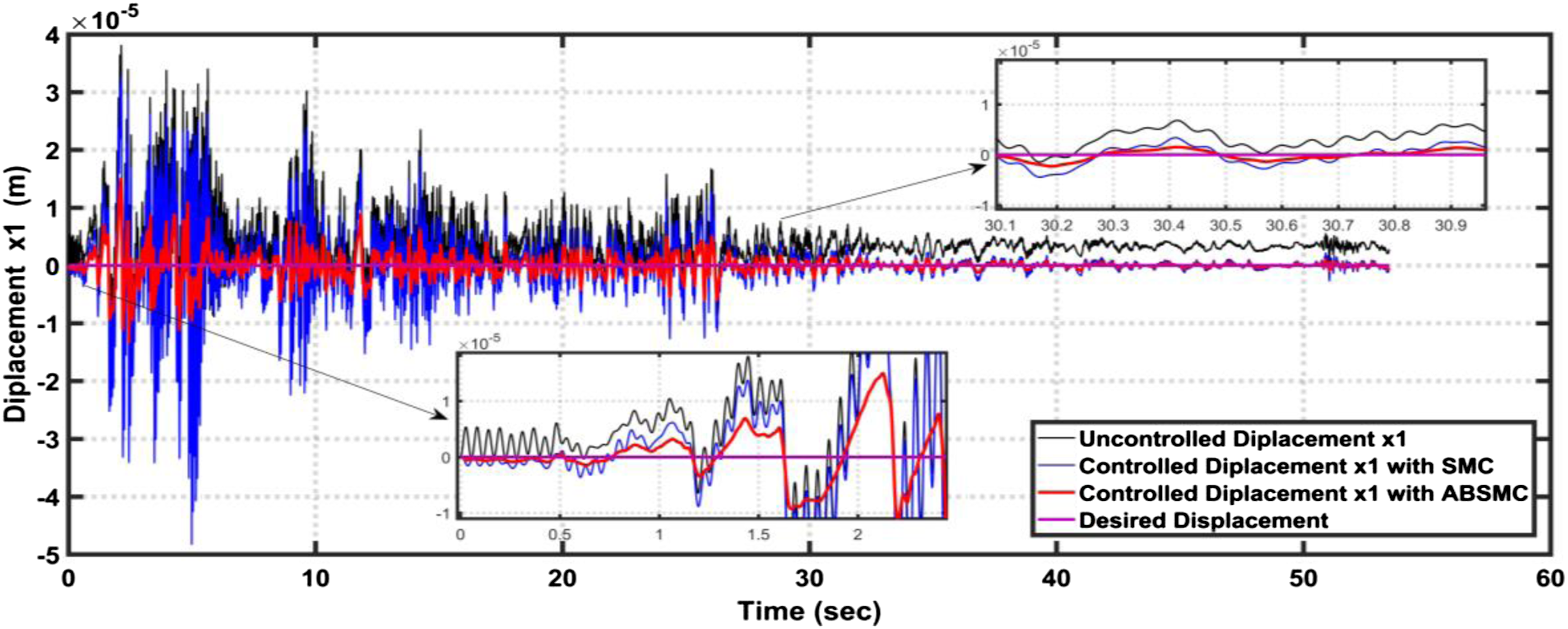
The performance comparison between SMC and ABSMC are evaluated in terms of Root Mean Square (RMS) of displacement. It has been shown that the RMS value of displacement for uncontrolled system under earthquake is equal to
The acceleration generated due to adaptive backstepping sliding mode control and the conventional sliding mode control is shown in Figure 8. It is clear that the acceleration generated by ABSMC is less than that generated by the SMC. This indicates that vibration suppression due to ABSMC is better than SMC. Acceleration responses of the earth-quaked building based on SMC and ABSMC. Note: ABSMC: adaptive backstepping sliding mode control; SMC: sliding mode control.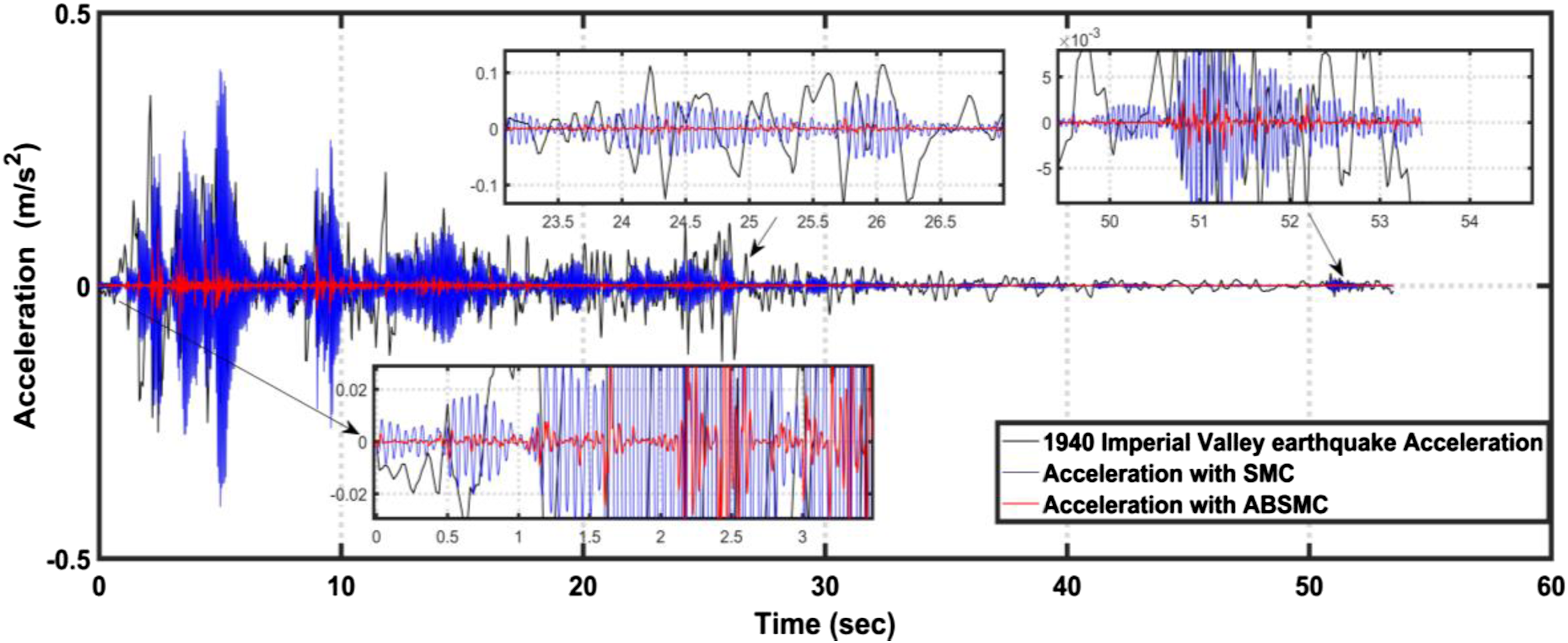
Figure 9 shows the generated control signal based on SMC and ABSMC. It is clear from the figure that the control effort produced by SMC is less than that based on ABSMC and this is price has to be paid by the ABSMC for better vibration suppression. Control signal generated from SMC and ABSMC. Note: ABSMC: adaptive backstepping sliding mode control; SMC: sliding mode control.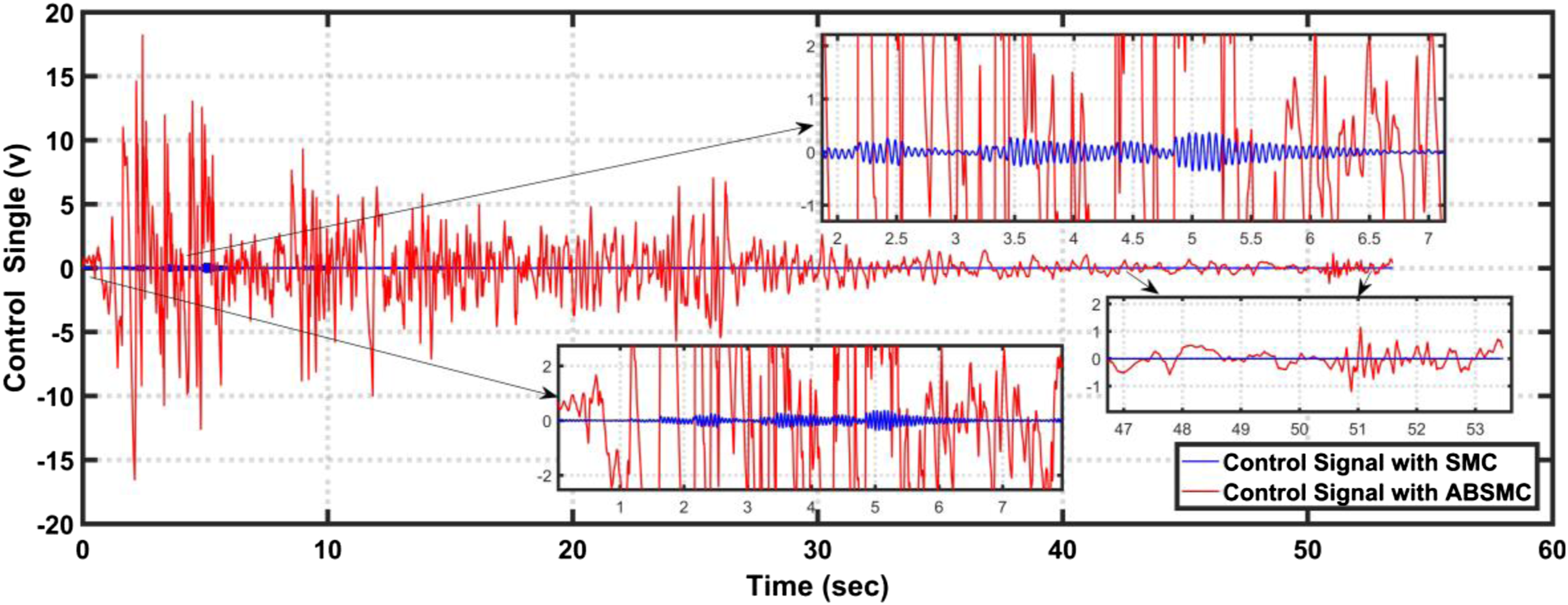
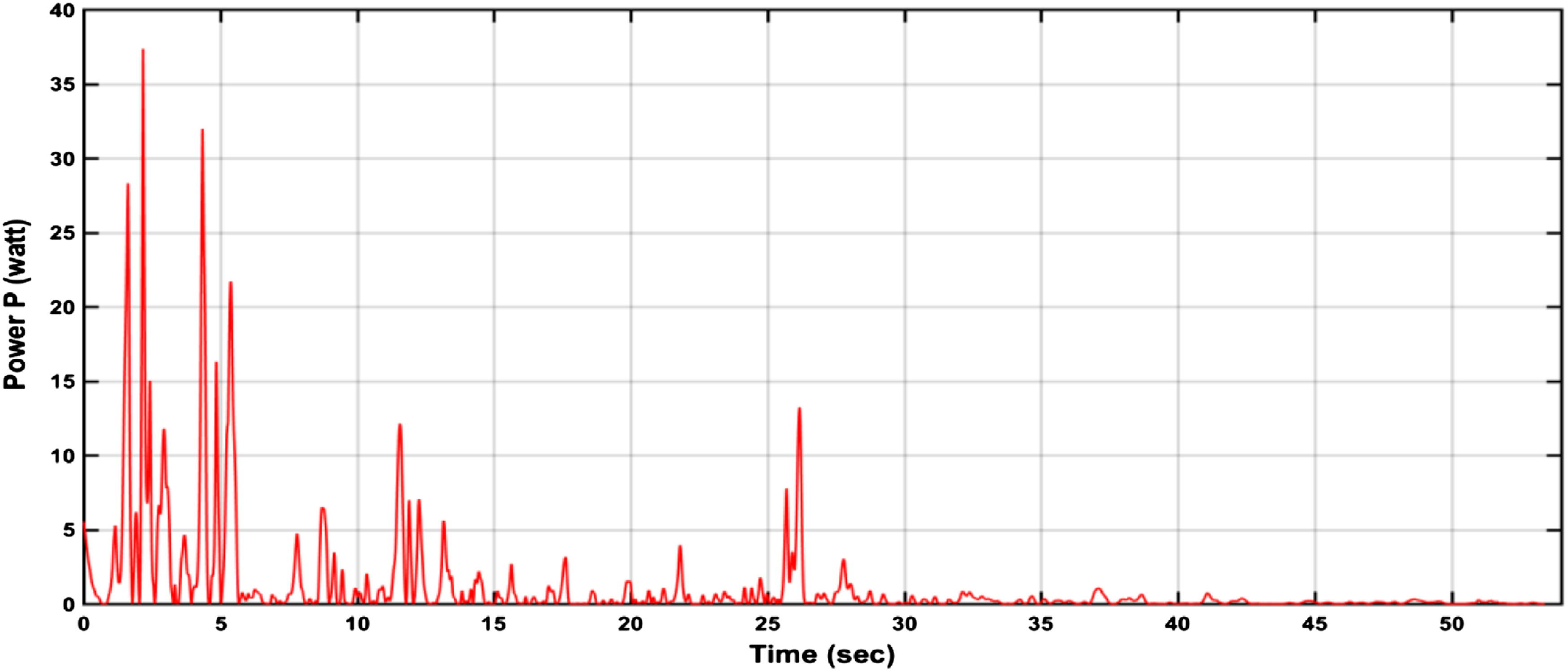
In this study, the value of resistance and inductance are taken as The current passing through the coil of MR Damper. The power dissipated through the coil of MR Damper.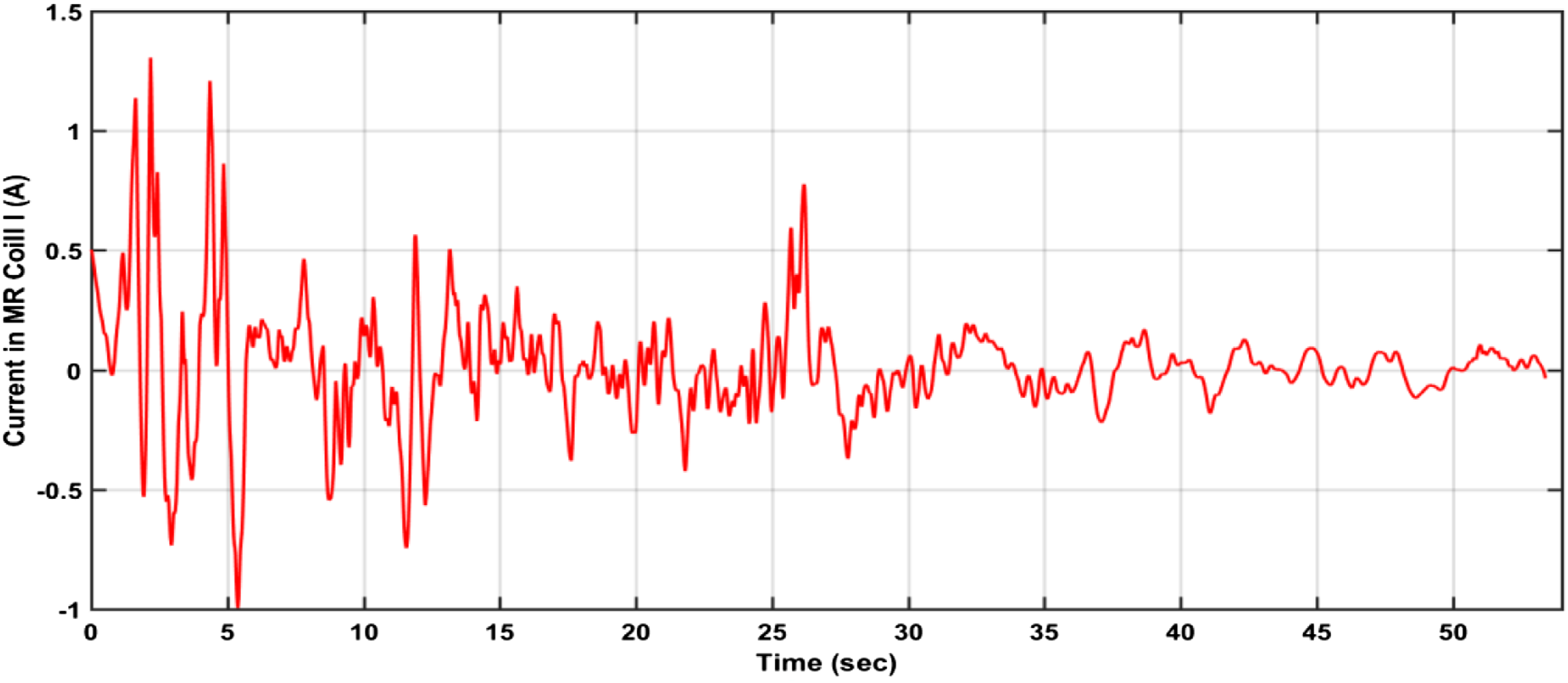
Under seismic vibration due to earthquake, the mass of structure remains unchanged, but the structure’s stiffness and damping will encounter a change or variation. This change in stiffness and damping characteristics of the building requires an adaptive control design to account and compensate these uncertainties. The cooperation of developed adaptive law and control law of ABSMC will cope with such variation in parameters. In this study, the maximum allowable change in building stiffness and damping is assumed to take 5% of their nominal values. The estimated values of stiffness and viscosity coefficients are depicted in Figures 12 and 13, respectively. Estimated value of stiffness coefficient by adaptive law. Estimated value of viscosity coefficient by adaptive law.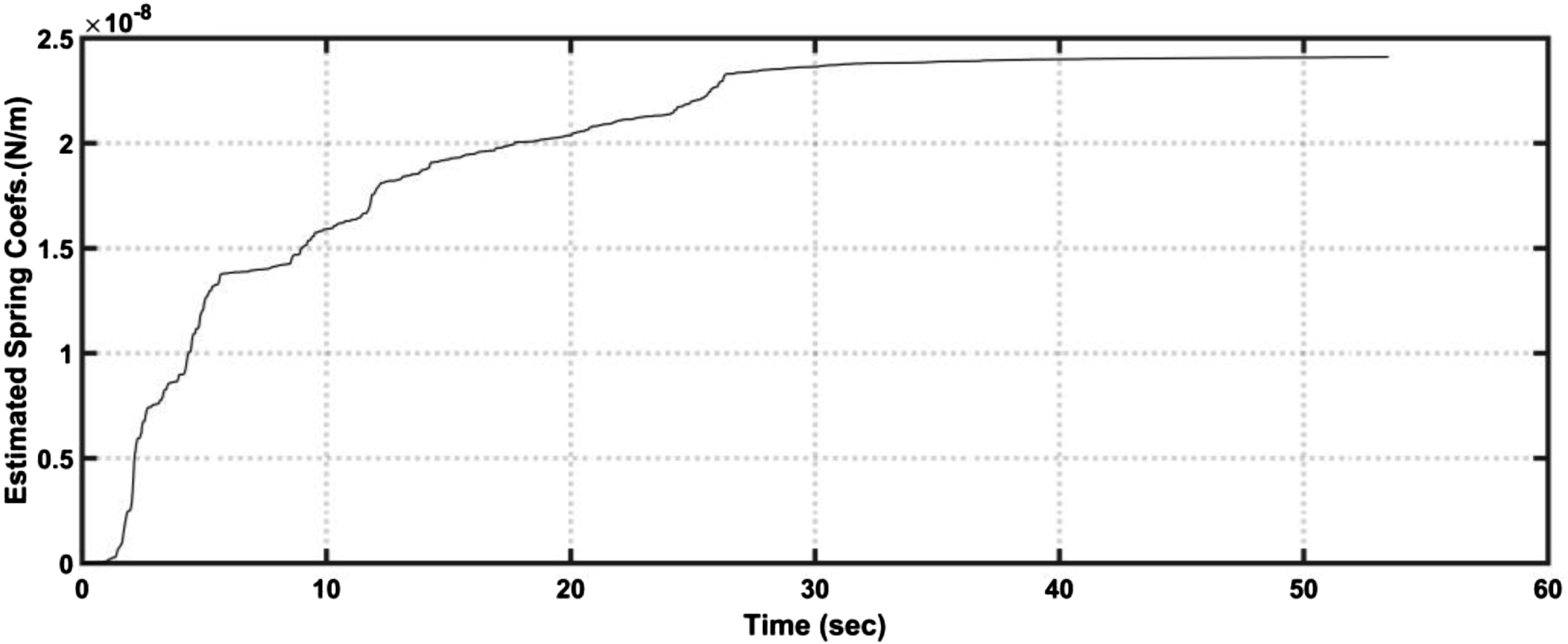
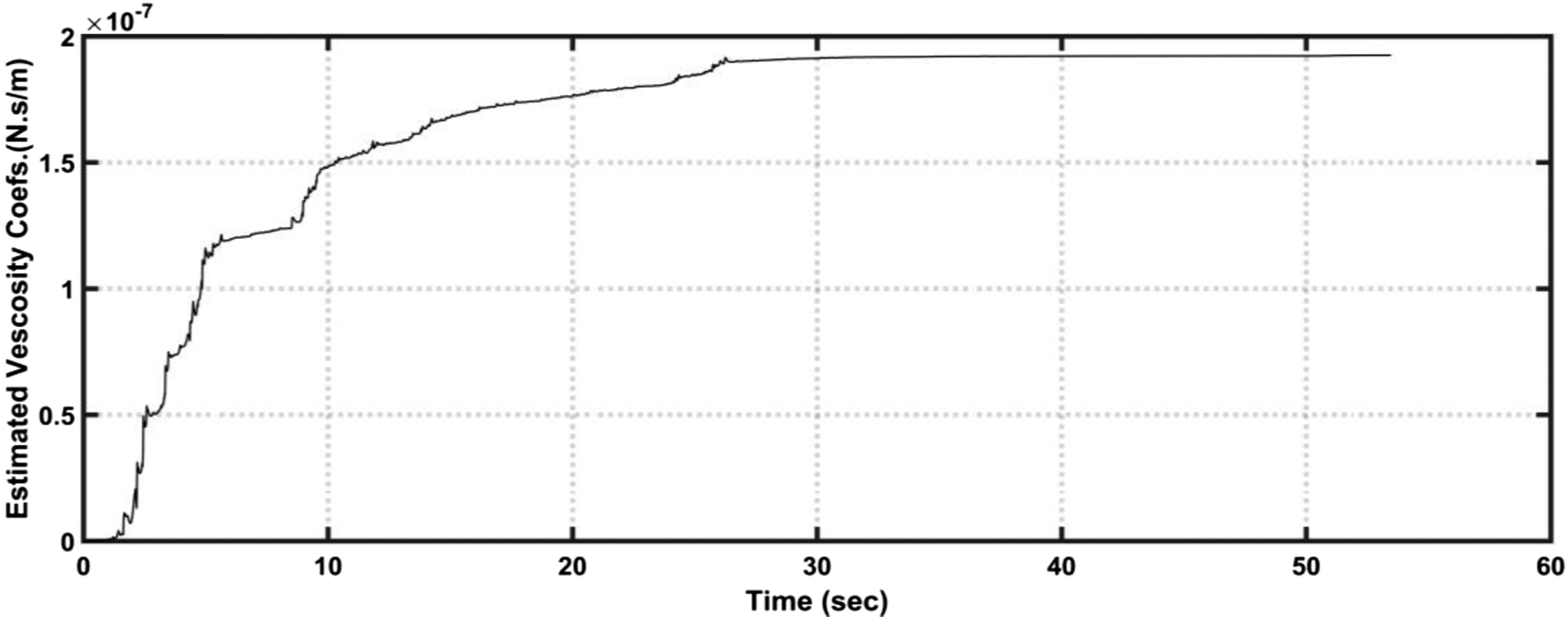
It is clear from the figures that the adaptive law could give bounded estimated uncertain parameters which lead to stability of controlled system. However, if these estimated parameters go unbounded in magnitude, this may lead to instability problems of adaptive controlled building system.
Conclusion
In this paper, design of ABSMC has been presented to mitigate the vibration of building subjected to earthquake. The design of control algorithm has been developed according to Lypunove-based stability analysis such to guarantee the asymptotically stability. The efficacy of proposed ABSMC has been confirmed based on numerical simulation. Based on simulated results, an improvement of 62.32% in vibration suppression has been obtained with SMC as compared to uncontrolled building, while the ABSMC could give 87.76% and 67.5% improvement in vibration suppression as compared to uncontrolled and SMC-based building, respectively. However, the power absorbed by MR circuit in case of SMC is 73.3% less than that based on ABSMC; this is the price to be paid by latter controller for suppression improvement. In addition, the proposed adaptive controller could give bounded estimated values for stiffness and viscosity coefficients. The present work can be extended to include building of multiple stories. Other control strategies can be pursued to conduct a comparison study in performance with proposed controller.47–49
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.