
Abstract
An adaptive backstepping fuzzy sliding mode control is proposed to approximate the unknown system dynamics for a cantilever beam in this paper. The adaptive backstepping fuzzy sliding mode control is developed by combining the backstepping method with adaptive fuzzy strategy, where backstepping design approach is used to drive the trajectory tracking errors to converge to zero rapidly with global asymptotic stability and fuzzy logic system is designed to approximate the unknown nonlinear function in the adaptive backstepping fuzzy sliding mode control. The proposed backstepping controllers can ensure proper tracking of the reference trajectory, and impose a desired dynamic behavior, giving robustness and insensitivity to parameter variations. Numerical simulation for cantilever beam is investigated to verify the effectiveness of the proposed adaptive backstepping fuzzy sliding mode control scheme and demonstrate the satisfactory vibration suppression performance.
Keywords
Introduction
Recently, vibration control using piezoceramic material has been widely studied and applied in flexible structures. The advantages of piezoceramic material include low-power consumption, rapid response, compactness, and easy implementation. Usually flexible structures are lightly damped owing to small material damping and lack of air damping in space, making vibration inevitable. Therefore, active vibration control for space flexible structures is an important concern, a challenging problem for both academic and industrial researchers for many years. During the past few years, advanced control approaches have been proposed to control the vibration of flexible structures. Active vibration controllers of the smart beams with piezoelectric sensors and actuators have been proposed in Ge et al.1 and Fallah and Ebrahimnejad.2 Ge et al. 1 used an adaptive boundary control technique to suppress the vibration of an Euler–Bernoulli beam system. Fallah et al. 2 proposed a finite volume formulation for the free vibration analysis and active vibration control of the smart beams with piezoelectric sensors and actuators. Adaptive pole placement controller 3 and adaptive controllers4–6 have been developed for the vibration control of flexible structures using piezoceramic sensor and actuator. Zhang et al. 3 developed a finite element model of a piezoelectric actuator and cantilever in a thermal environment to suppress vibration effectively.
As we know, sliding mode control (SMC) has many attractive features such as robustness to parameter variations and insensitivity to disturbance. The basic idea of the SMC is to drive and maintain the system trajectory on a sliding surface designed a priori in the state space.
It is reasonable to combine the adaptive control with sliding mode control in practical application. Some adaptive sliding mode controllers using smart materials7–11 have been investigated for vibration control of flexible structures. Wang et al.7 presented an experimental study of an adaptive robust sliding-mode control scheme based on the Lyapunov’s direct method for active vibration control of a flexible beam using PZT sensor and actuator. Oveisi et al. 10 proposed an adaptive sliding mode vibration controller for a nonlinear smart beam and implemented a comparison with self-tuning Ziegler–Nichols proportional–integral–derivative controller. Azadi et al. 11 presented a hybrid adaptive sliding mode controller for both the rotational maneuver and the vibration control of smart flexible appendages of a satellite moving in a circular orbit.
In the last few years, fuzzy control has been extensively applied in a wide variety of industrial systems and consumer products because of its model-free approach. Fuzzy control has achieved great practical successes in industrial processes and many other fields. Lee et al. 12 presented active vibration control of a cantilever beam structural system by combining the adaptive input estimation method with the fuzzy robust controller. Nasser et al. 13 used a nonlinear fuzzy controller for active vibration damping of composite structures. Adaptive fuzzy sliding mode based active vibration controller for flexible structures were discussed in Li et al.,14 Nguyen et al.,15 and Qiu et al.16,17 Li et al. 14 presented an adaptive fuzzy sliding mode based active vibration control where fuzzy logic-based controller was applied to active vibration control of a smart flexible beam with mass uncertainty through experimental studies. Qiu et al. 18 designed the design and implementation of a fuzzy sliding mode control algorithm and a composite controller to dampen the vibration of a flexible manipulator with a flexible link and a harmonic drive gear. Adaptive neuro fuzzy system and fuzzy least square support vector machine based on adaptive variable chaos immune algorithm have been discussed in Watany and Eltantawie19 and Qian and Zhu20 for flexible structures. Adaptive sliding mode control with new double-loop recurrent neural network for dynamic systems was investigated in Fei and Lu. 21
Backstepping control is an important tool for nonlinear system owing to the recursive and systematic controller design procedure for strict-feedback systems. However, robust adaptive fuzzy control using backstepping design for flexible structure has not been investigated, the ABFSMC approach has not been applied to cantilever beam yet. In this paper, an adaptive backstepping fuzzy sliding mode control (ABFSMC) approach is designed to realize the vibration tracking for cantilever beam. The dynamic equations of cantilever beam are transformed into analogically cascade system that can be implemented using backstepping control. The advantages of the proposed controller compared to the existing ones can be summarized as follows:
Backstepping control, adaptive control, fuzzy control, and sliding mode control are combined and applied to cantilever beam. The fuzzy control method combined with the adaptive control for cantilever beam not only avoids dependence on the system model, but also makes the algorithm obtain the self-learning ability and adjust the fuzzy parameters. Hence, the ABFSMC approach not only removes some of the fundamental limitations of the traditional approach but also provides improved tracking accuracy. The proposed sliding mode control adds additional compensator for achieving and improving the system stability, hence obtaining desired system behavior and performance. Thus, the entire closed-loop system meets the expectations indicators of dynamic and static performance and achieves accurate vibration tracking performance. Backstepping design for a class of systems satisfying the strict feedback form can relax the matching condition appeared in the design of sliding mode control. In addition, backstepping design can avoid the cancellation of useful nonlinearities. The ideal of backstepping is to design a controller recursively by considering some of the state variables as “virtual controls” and designing intermediate control laws to improve the robustness of the cantilever beam. Therefore the proposed ABFSMC approach attenuates the model uncertainties and external disturbances.
The paper is organized as follows. In the upcoming section, the dynamic equation of piezoceramic cantilever beam is established. Next, an adaptive backstepping fuzzy sliding mode controller method is derived to guarantee the stability of the closed-loop system and good tracking performance. Later, simulation examples are presented to illustrate the excellent performance of the proposed controller. Conclusions are given in the last section.
Model of piezoceramic cantilever beam
As shown in Figure 1, the length, width, and thickness of the cantilever beam is
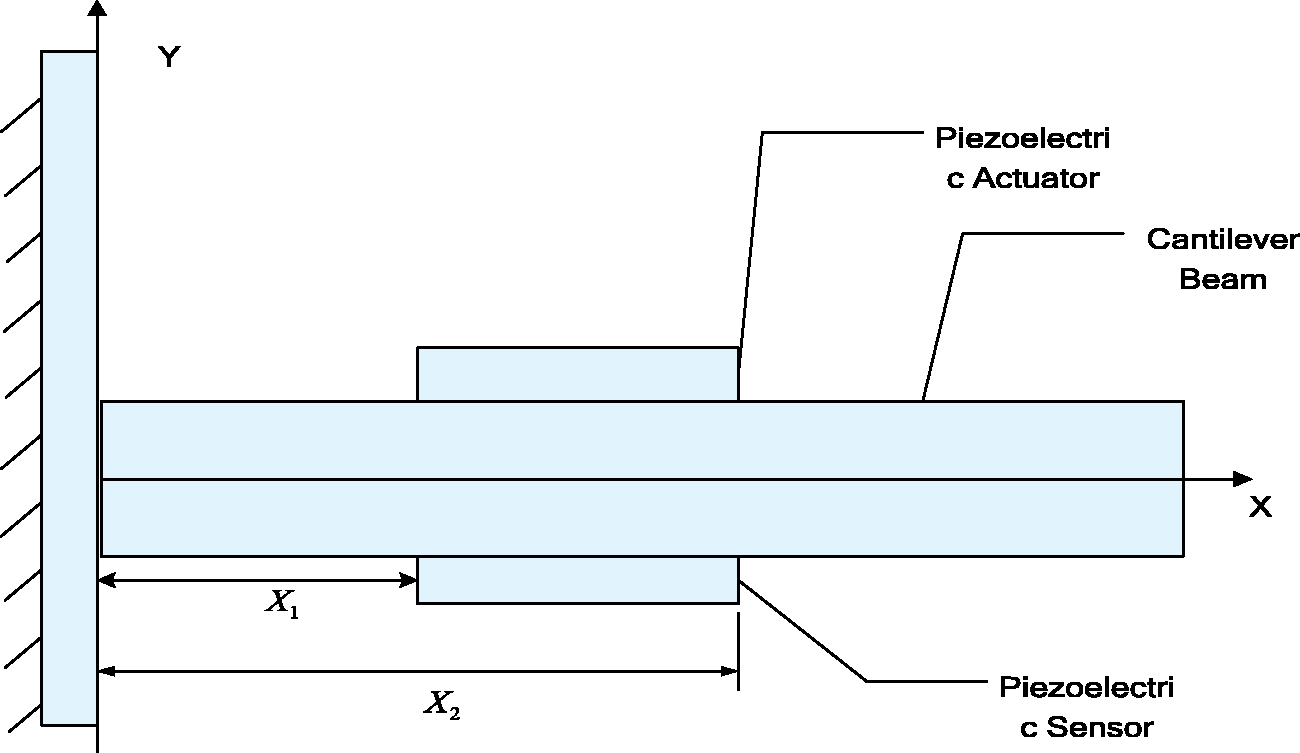
Model of piezoceramic cantilever beam.
We assume that the piezoceramic patches are pasted well on the cantilever beam and the stickup layer of piezoceramic patches piezoceramic has no effect on the dynamic characteristics of the cantilever beam. According to the direct piezoceramic effect, the output charge of piezoceramic sensor, which is caused by the beam deflection, is

Under the action of the input voltage, the piezoceramic actuator torque for the cantilever beam is

The dynamics of cantilever beam vibration is as follows

When the cantilever beam does flexural vibration in the xy plane, by means of the preceding N modals of the cantilever beam, the deflection of the beam


The output voltage of piezoceramic sensors can be expressed as

Using equations (3) and (4), modal equation of motion of piezoceramic smart cantilever beam under the action of a piezoceramic actuator can be expressed as

Design of adaptive backstepping fuzzy sliding mode controller
In this section, the ABFSMC approach is designed for the vibration control of cantilever beam in the presence of the unknown system parameters of cantilever beam. The control target is to achieve real-time compensation for the model uncertainties and external disturbance. The ABFSMC shown in Figure 2 is proposed.
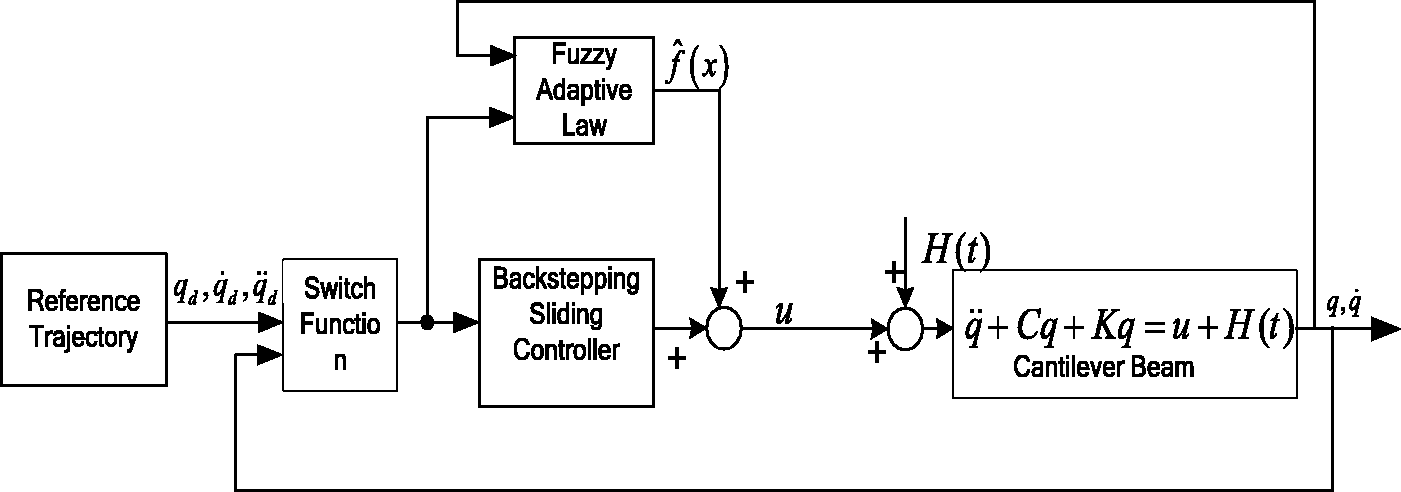
Block diagram of an adaptive backstepping fuzzy sliding mode vibration control.
The vector form of piezoceramic cantilever beam dynamics model can be written as

Defining

Considering the model uncertainties and external disturbance, equation (9) can be expressed as

Then, the reference model is defined as

Defining virtual control force

Then defining virtual error as

The first Lyapunov function candidate is chosen as
The time derivative of the

When
Define the second Lyapunov function as


The time derivative of
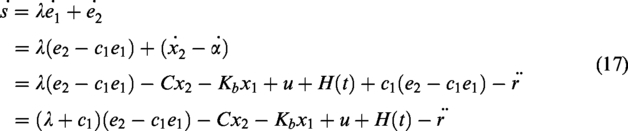
The time derivative of
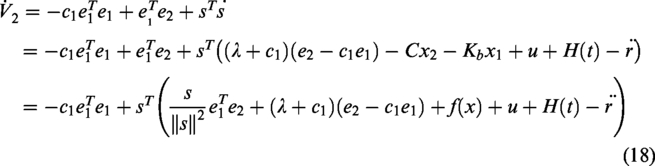
In the design of the sliding mode controller, we use exponential reaching law as

By equations (18) and (19), we design a sliding mode control law as

Substituting equations (20) into (
18
) yields

The ABFSMC system still requires detailed information of cantilever beam explicitly in terms of nonlinear compensation, which makes it difficult to be implemented in practical situations. Hence, in allusion to the vibration control of cantilever beam with unknown model uncertainties and external disturbances, an adaptive fuzzy control algorithm is synthesized in this section, which utilizes the advantages of fuzzy control to approximate and compensate for the unknown uncertainties.
Observing the expression
The fuzzy system is constituted by
So the output of the fuzzy system is

Defining the fuzzy function as

We define the optimal approximation constant

Differentiating equation (25) yields
Since

Then equation (26) becomes

Since

Then equation (28) becomes
Substituting the parameter adaptation law (24) into equation (30), we obtain

Consequently,
Simulation study
According to the dynamic characteristics, the main vibration is determined by the structure’s first several modes. To illustrate the simulation of this flexible structure vibration suppression, here we only choose the first mode system. In this section, we will evaluate the proposed ABFSMC scheme, which will require no knowledge of the dynamics, not even their structure on the cantilever beam model. The control objective is to make the cantilever beam system track the desired reference trajectory and estimate the unknown function
where
Figure 3 shows the membership function of the control system.
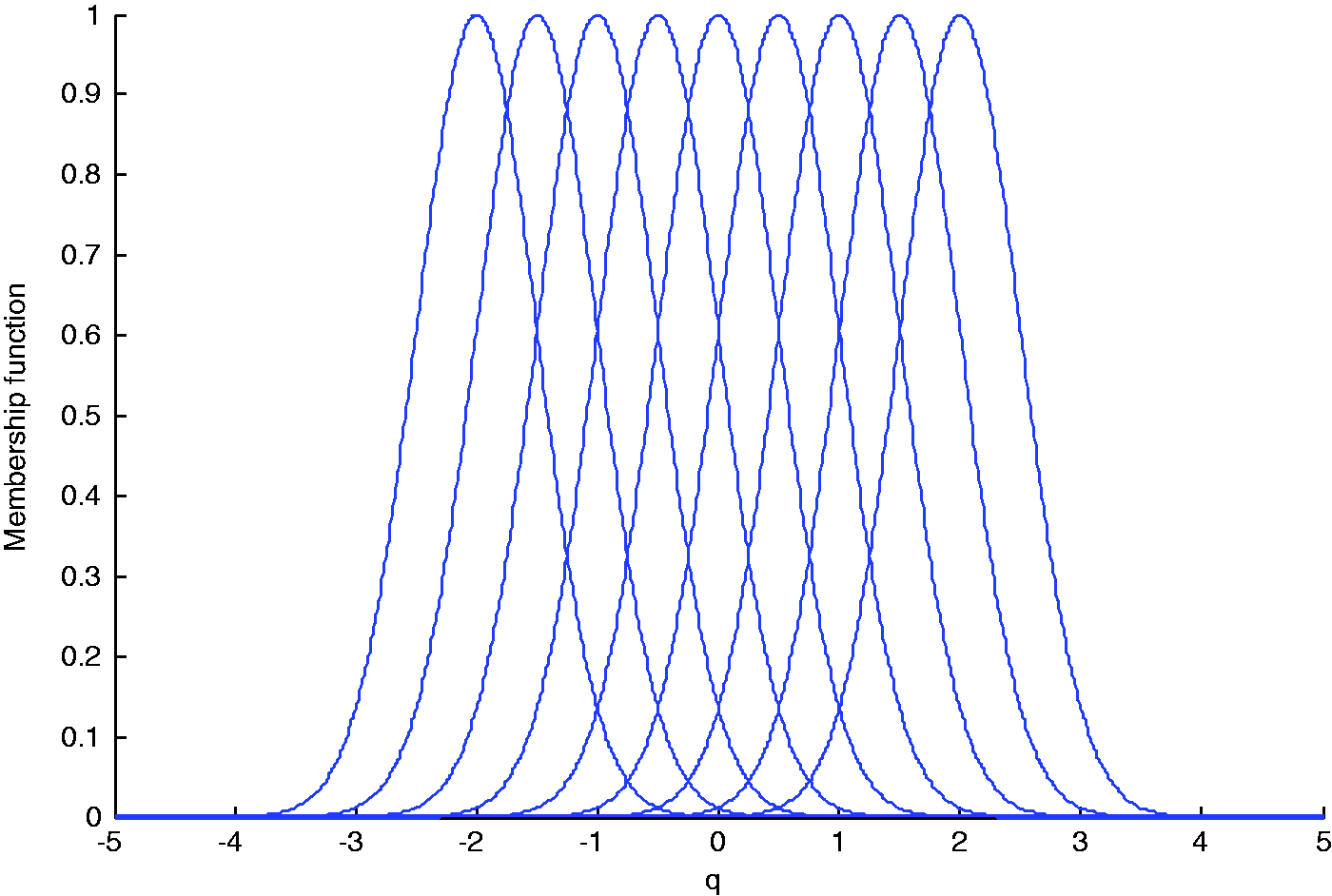
The membership function of fuzzy system.
Simulation study with steady and transient disturbances
White noise chosen as
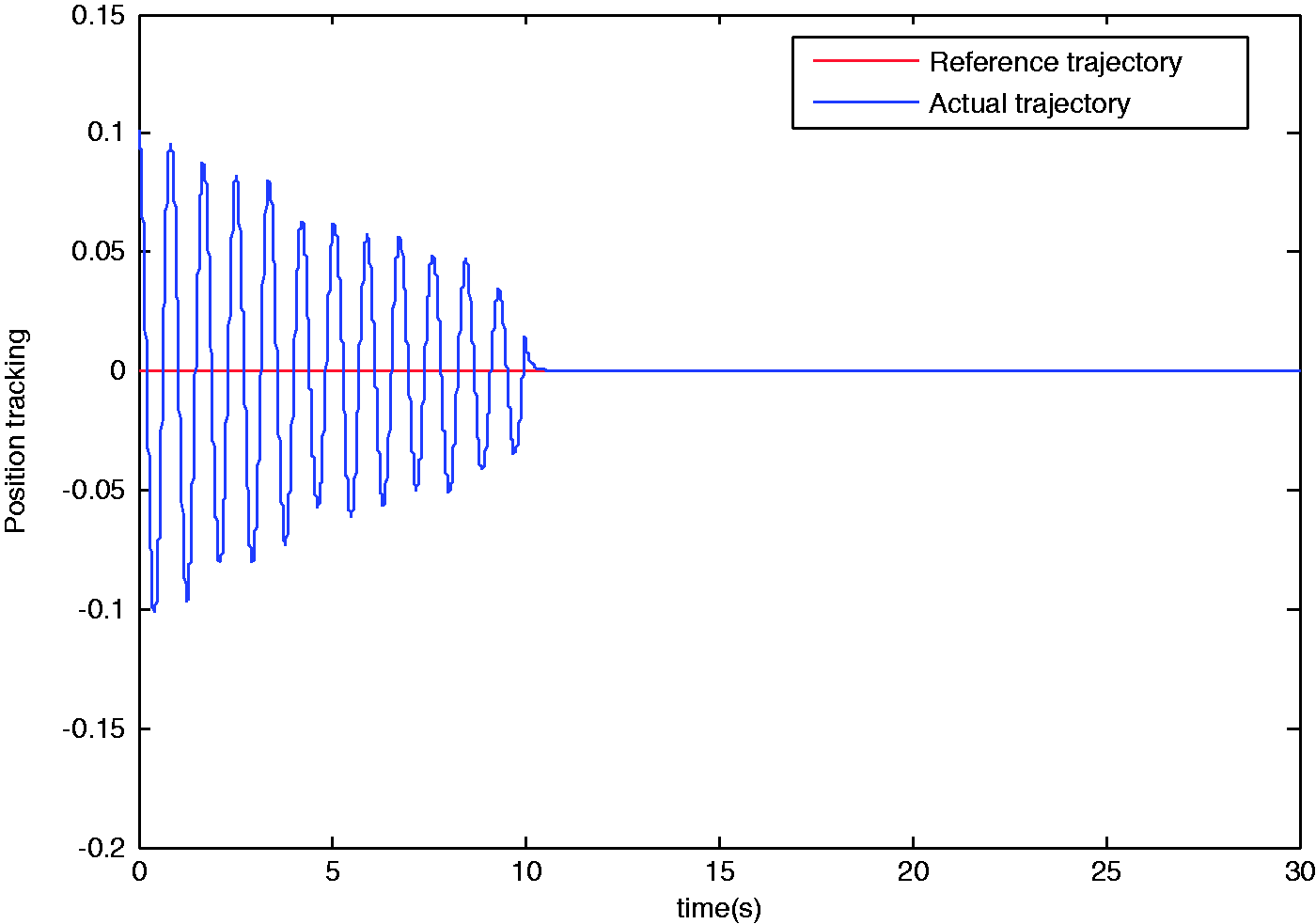
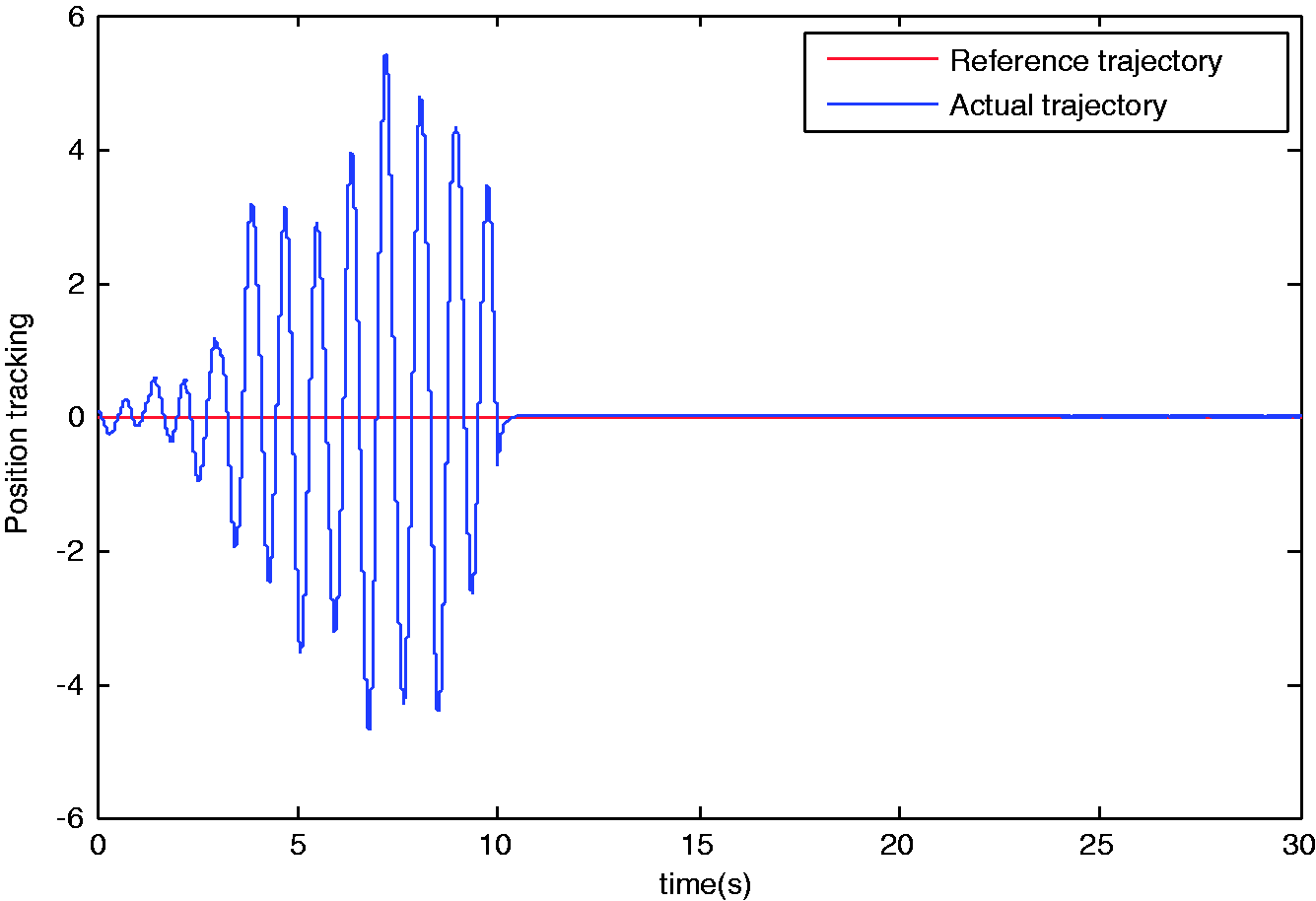
Vibration tracking under steady disturbance.
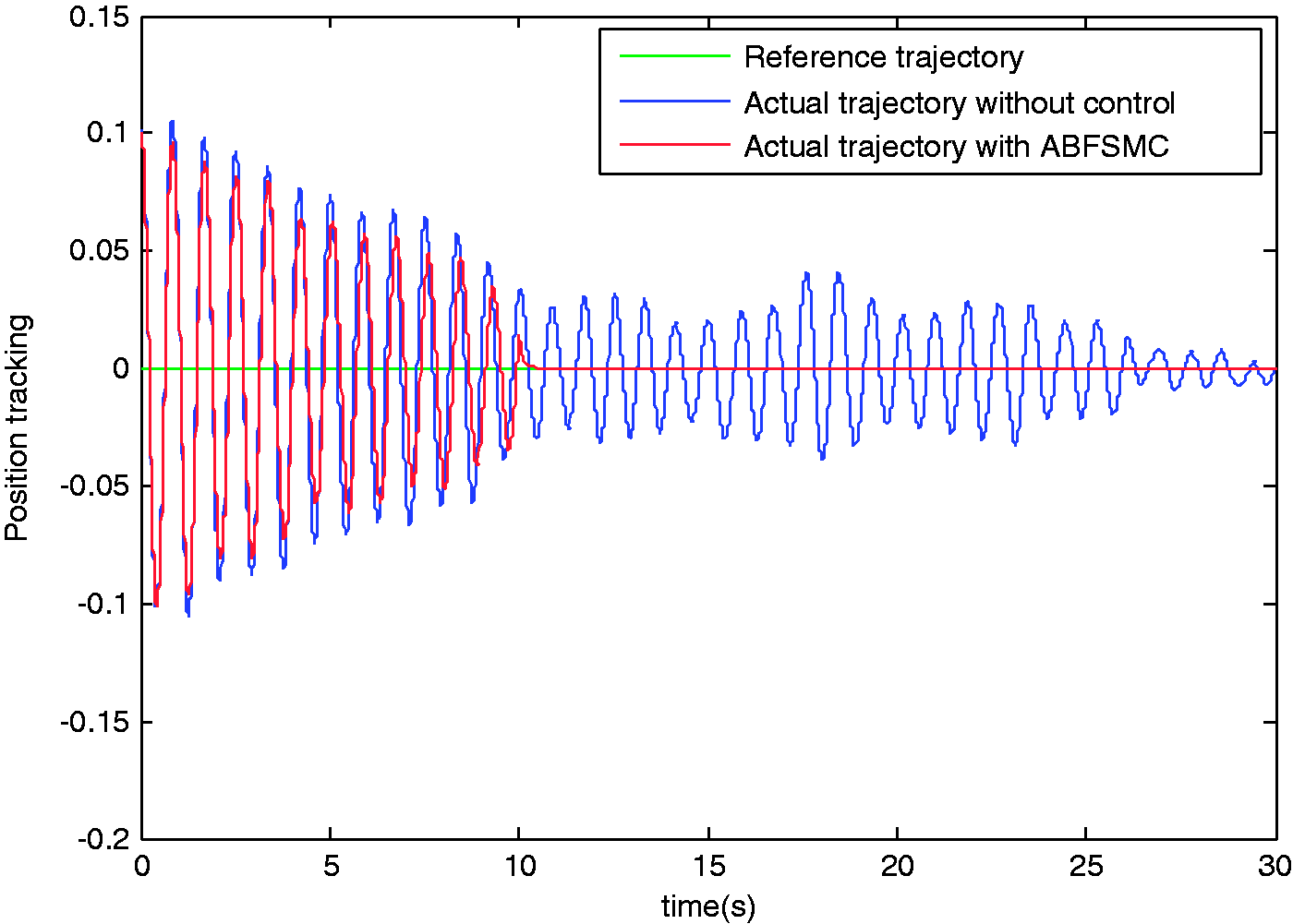
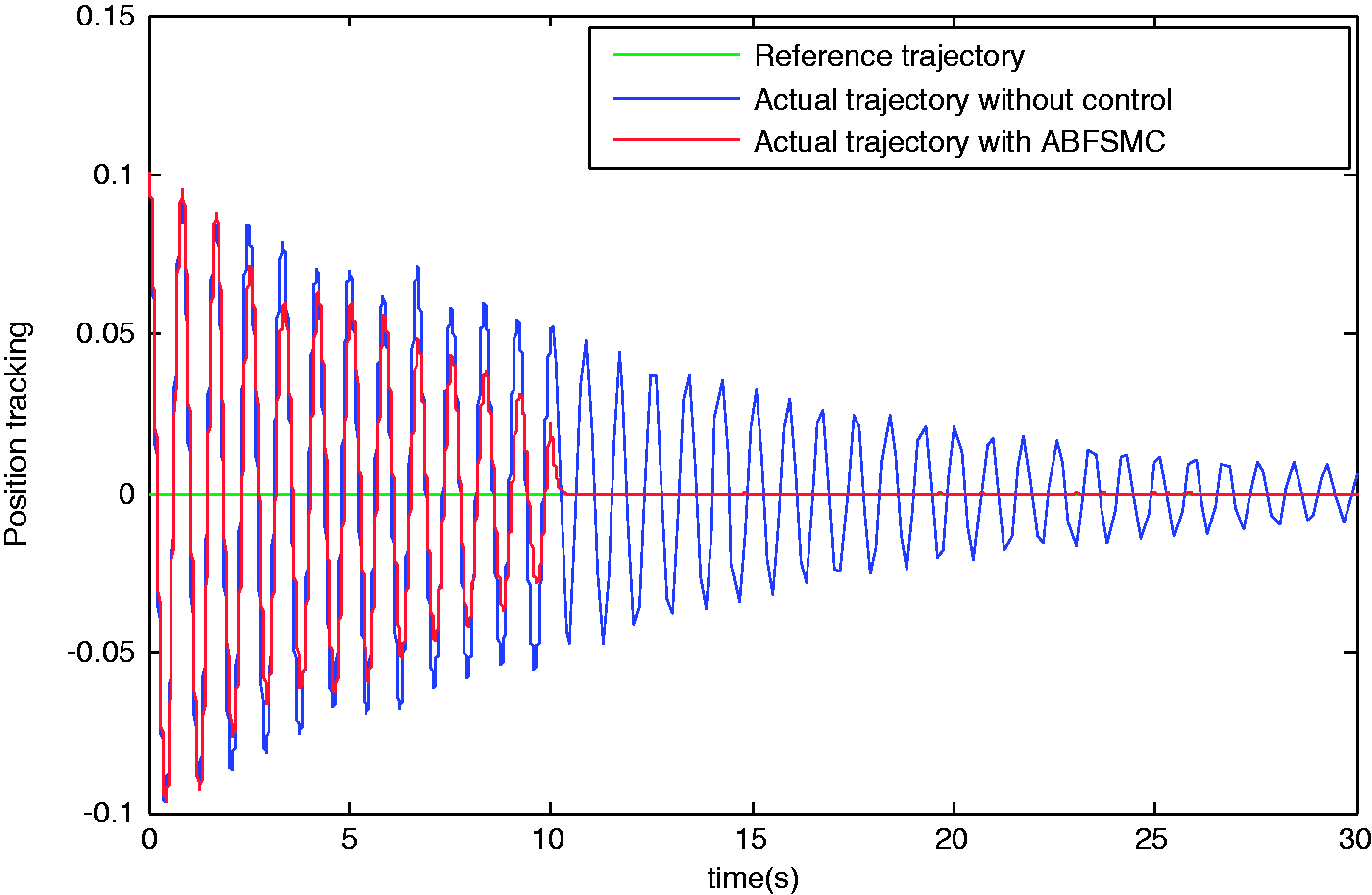
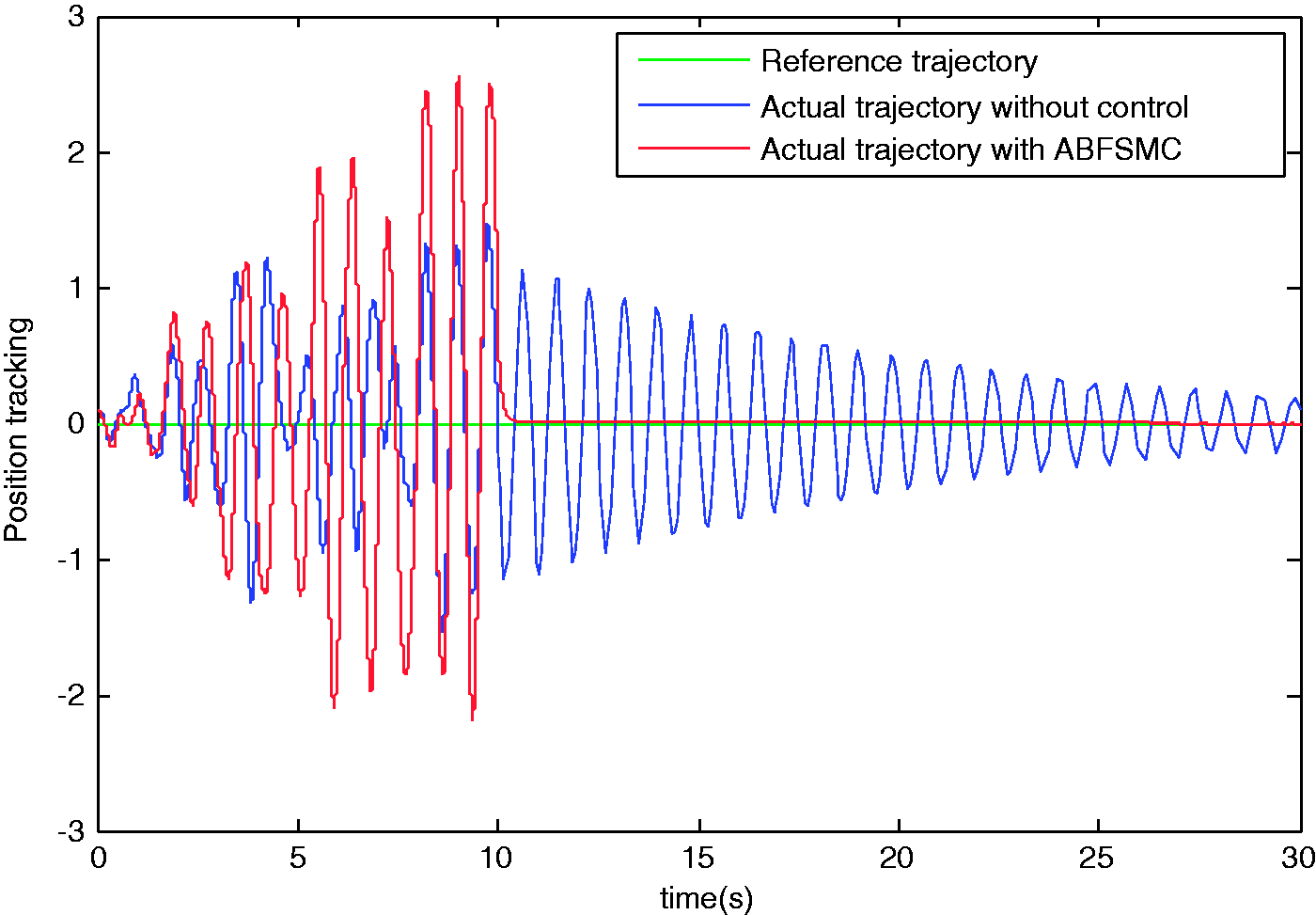
A comparison of the vibration control performance between ABFSMC and without control under steady disturbance.
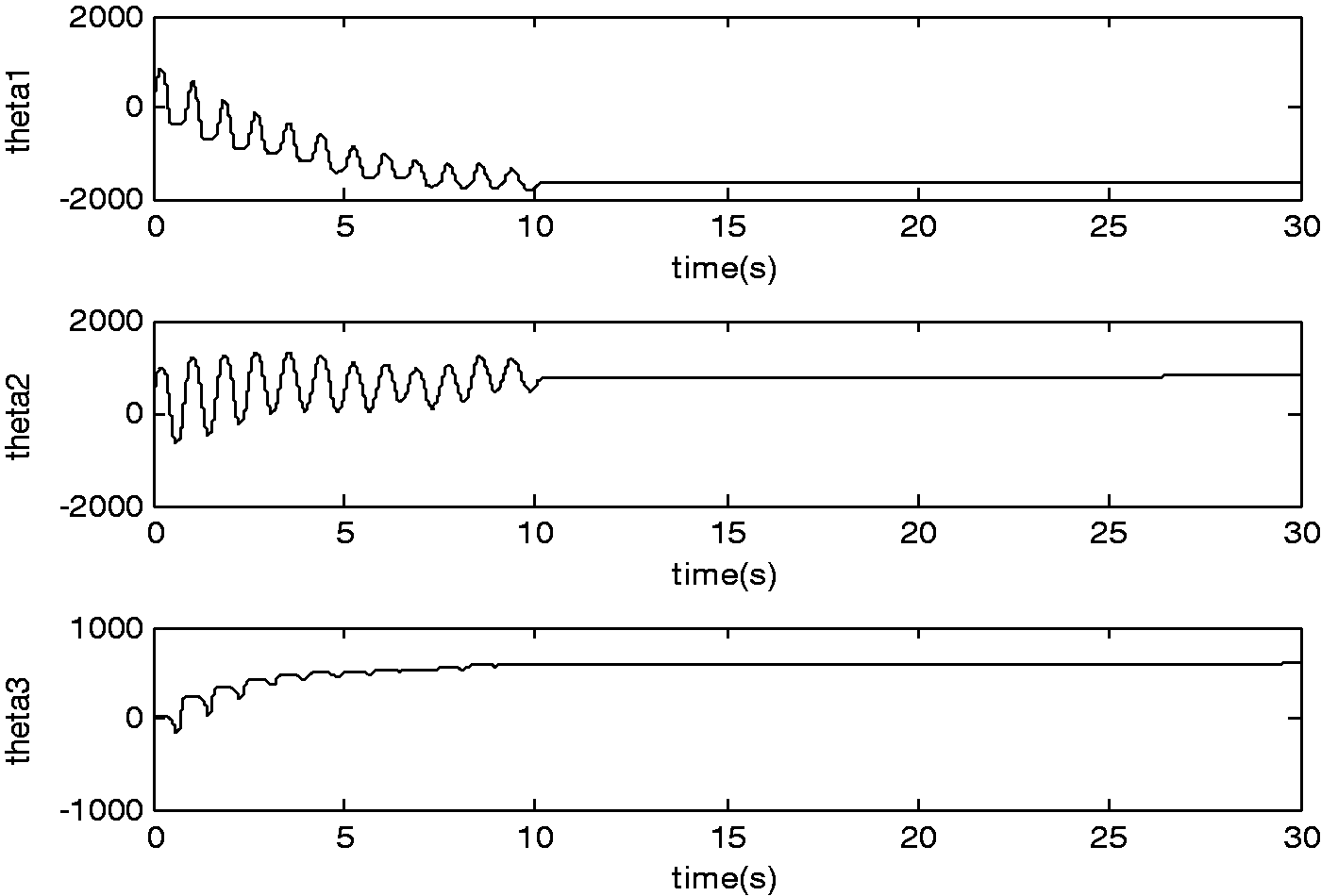
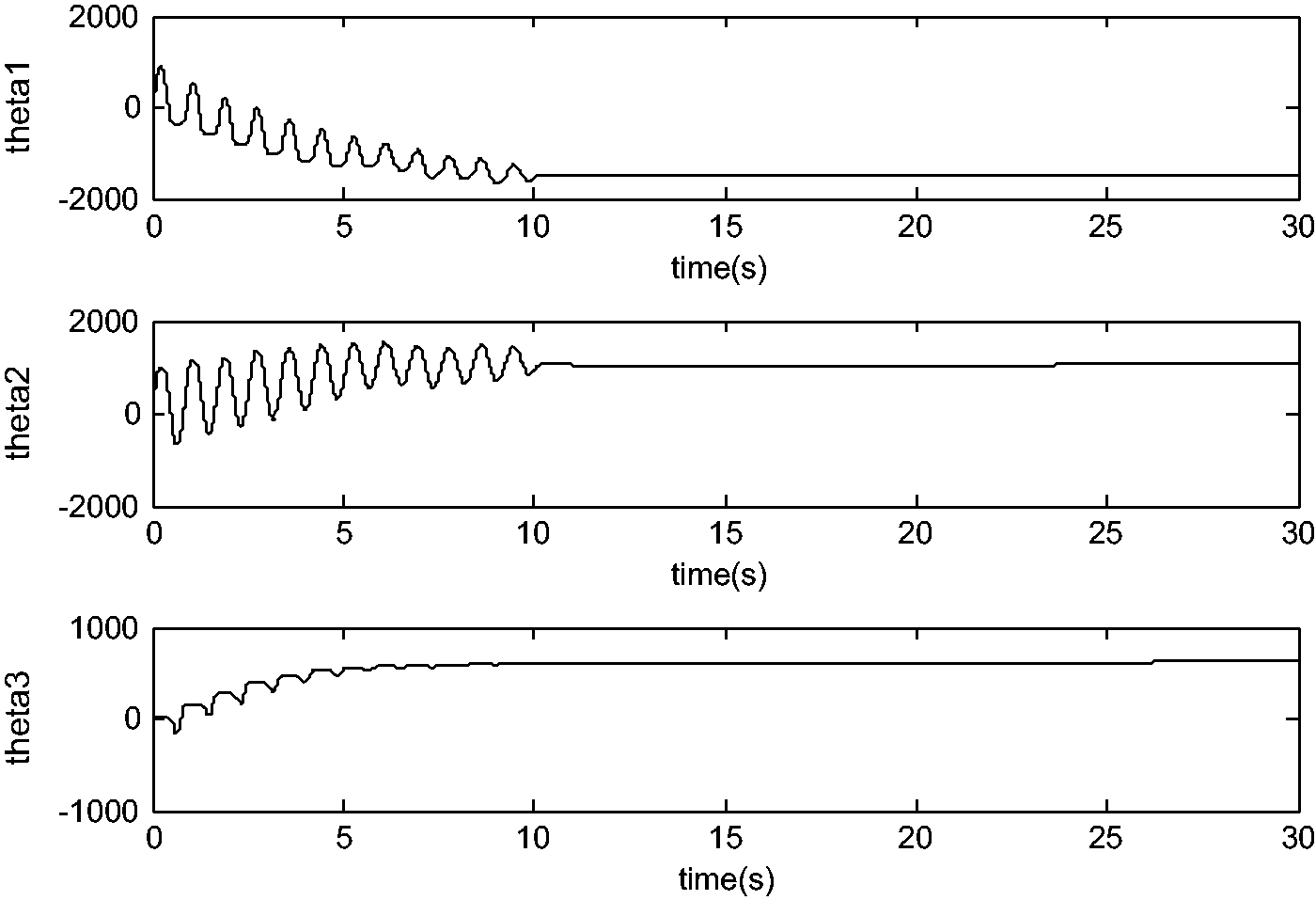
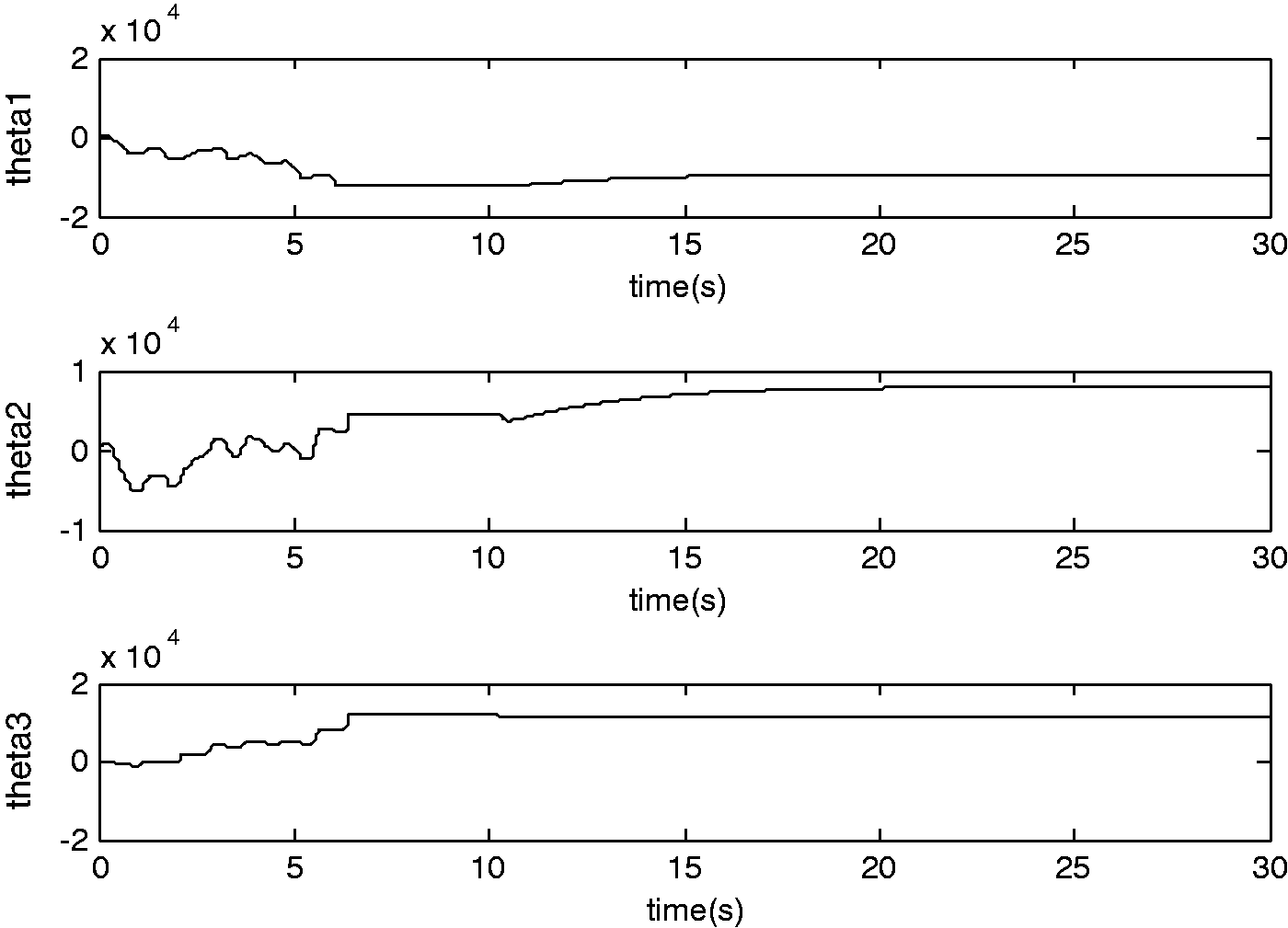
The adaptive fuzzy parameter under steady disturbance.
Then white noise chosen as
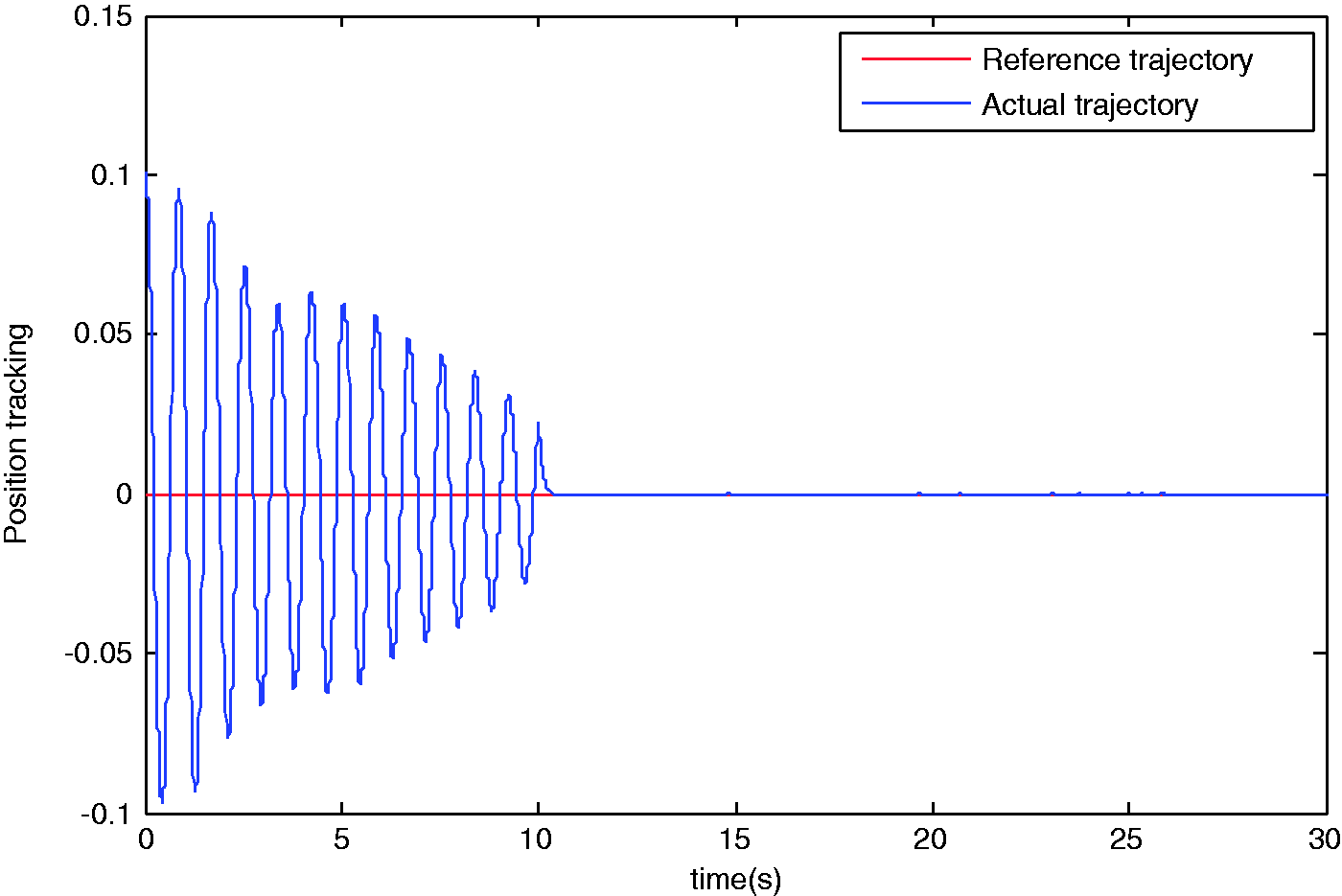
Vibration tracking under transient disturbance.
A comparison of the vibration control performance between the ABFSMC and without control under transient disturbance.
The adaptive fuzzy parameter under transient disturbance.
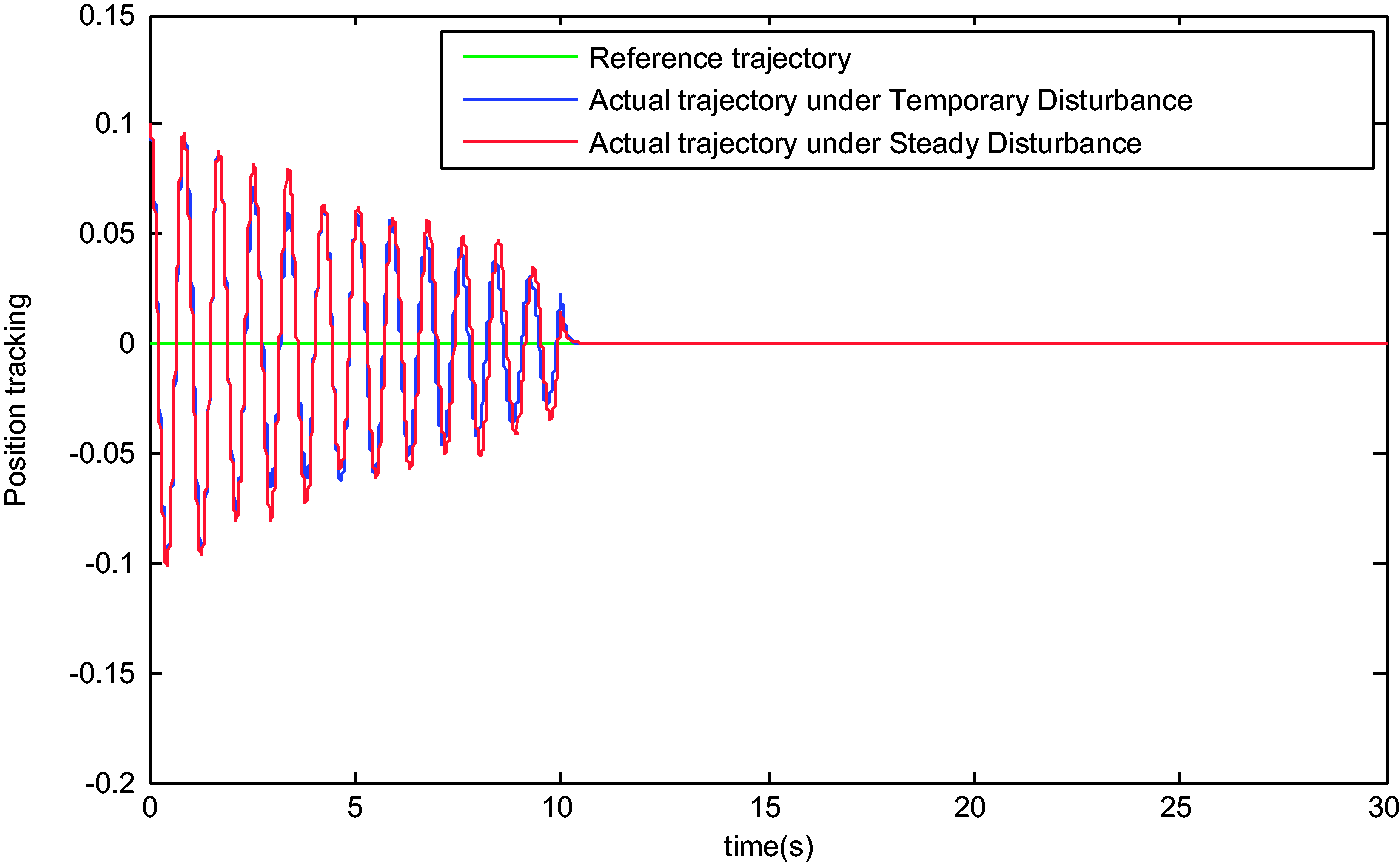
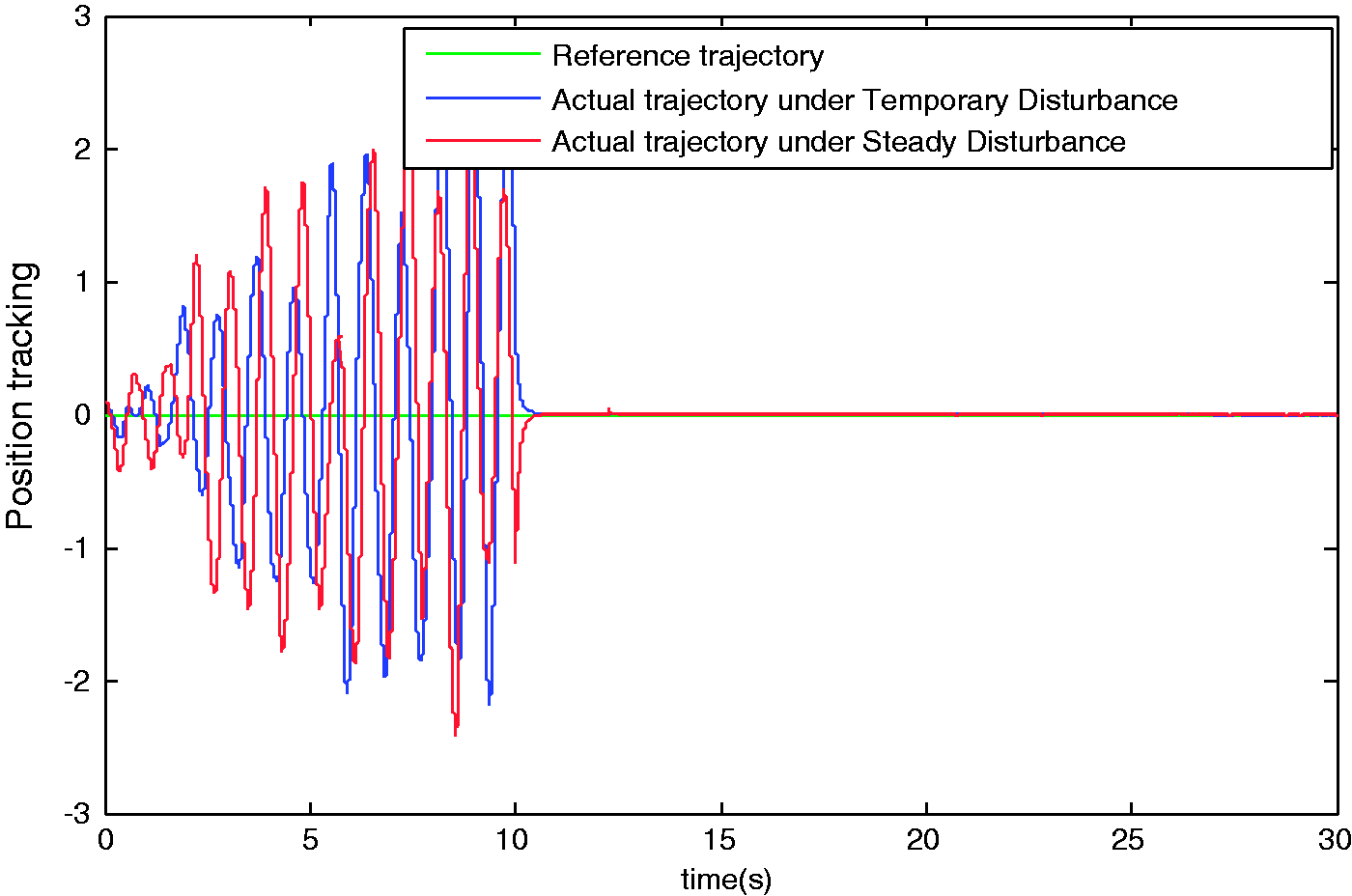
A comparison of the vibration control performance between ABFSMC under steady disturbance and ABFSMC under transient disturbance.
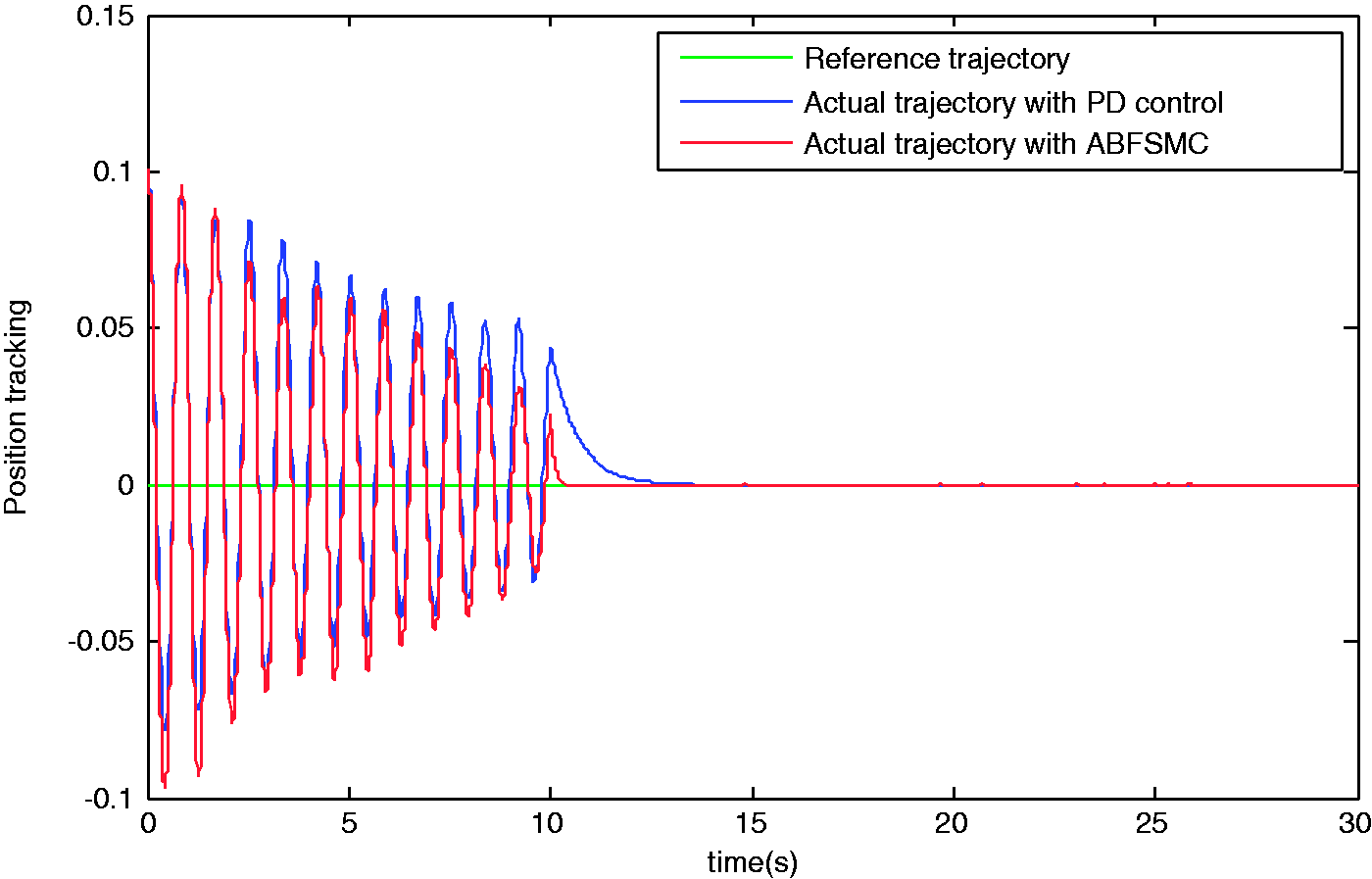
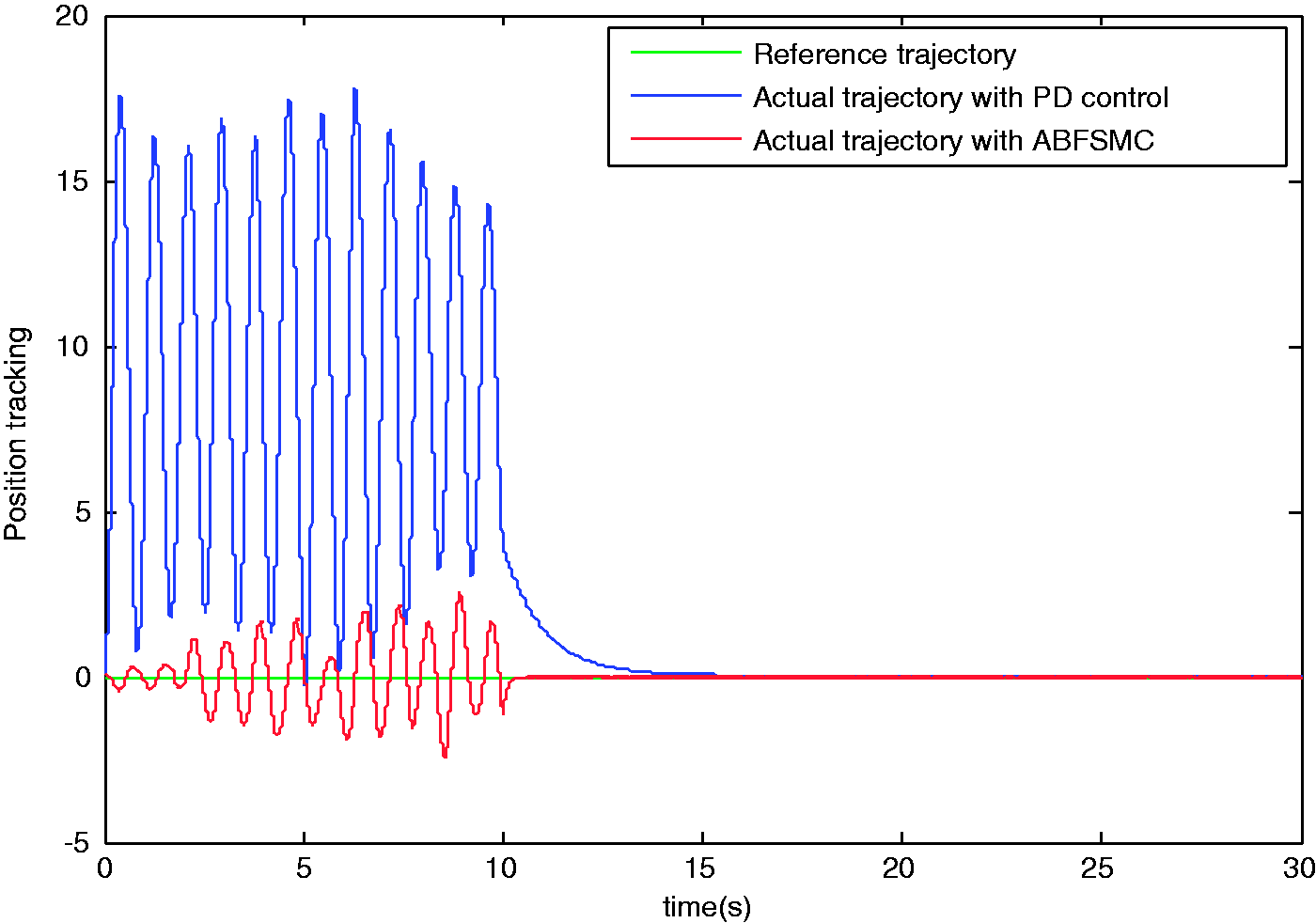
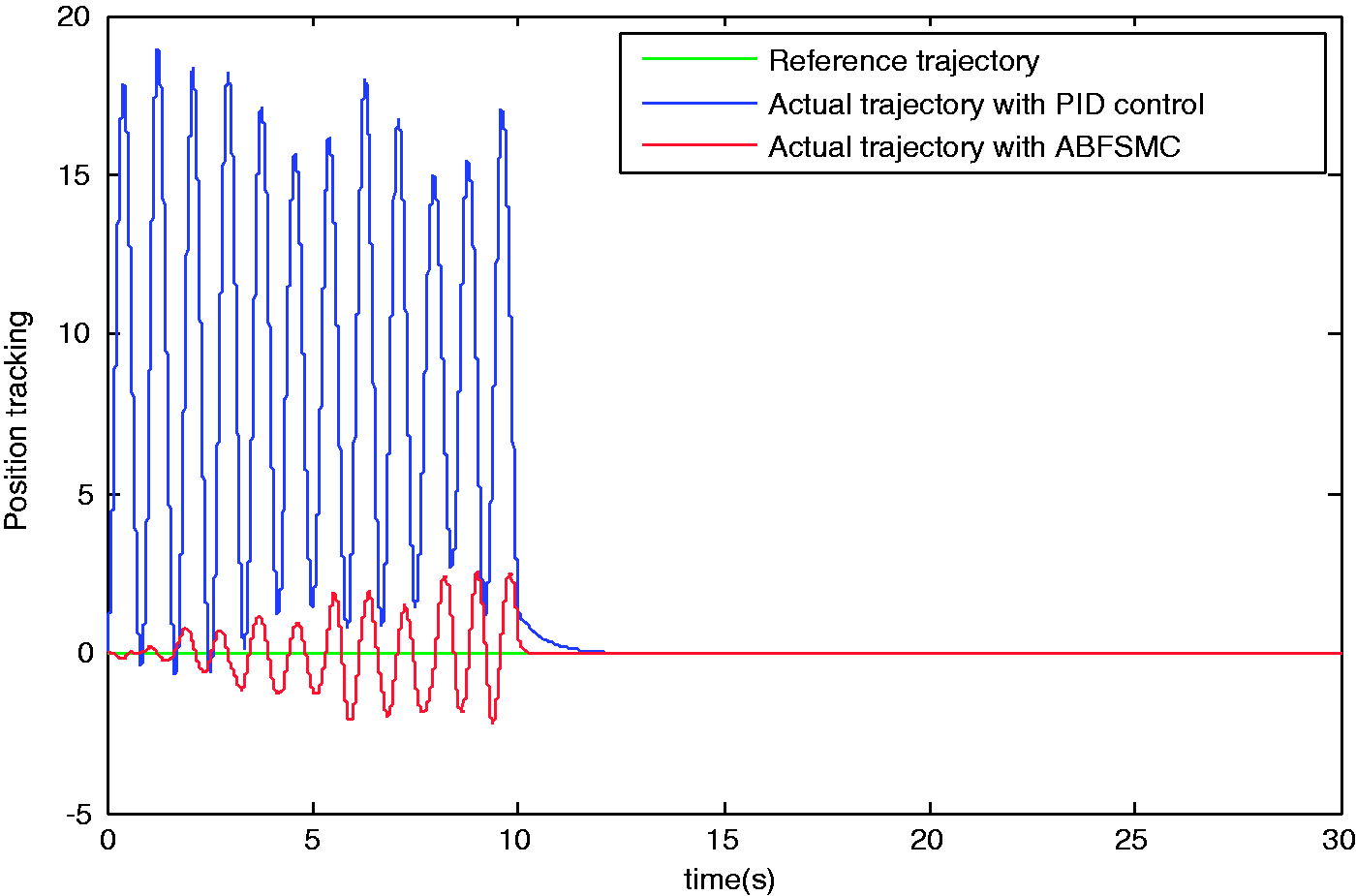
In order to demonstrate the advantages of the proposed controller, a comparable investigation is accomplished between the proposed ABFSMC and conventional proportional–derivative (PD) control applied to the uncertain cantilever beam, where the vibration tracking corresponding to ABFSMC decrease obviously in contrast with the conventional PD control. Besides, from Figures 11 and 12, it can be also seen that the vibration tracking of ABFSMC converge to zero in about 1 s and the trajectory is much smoother, improving the dynamic behavior of the cantilever beam and verifying that the designed control law can ensure the stability of the vibration control system.
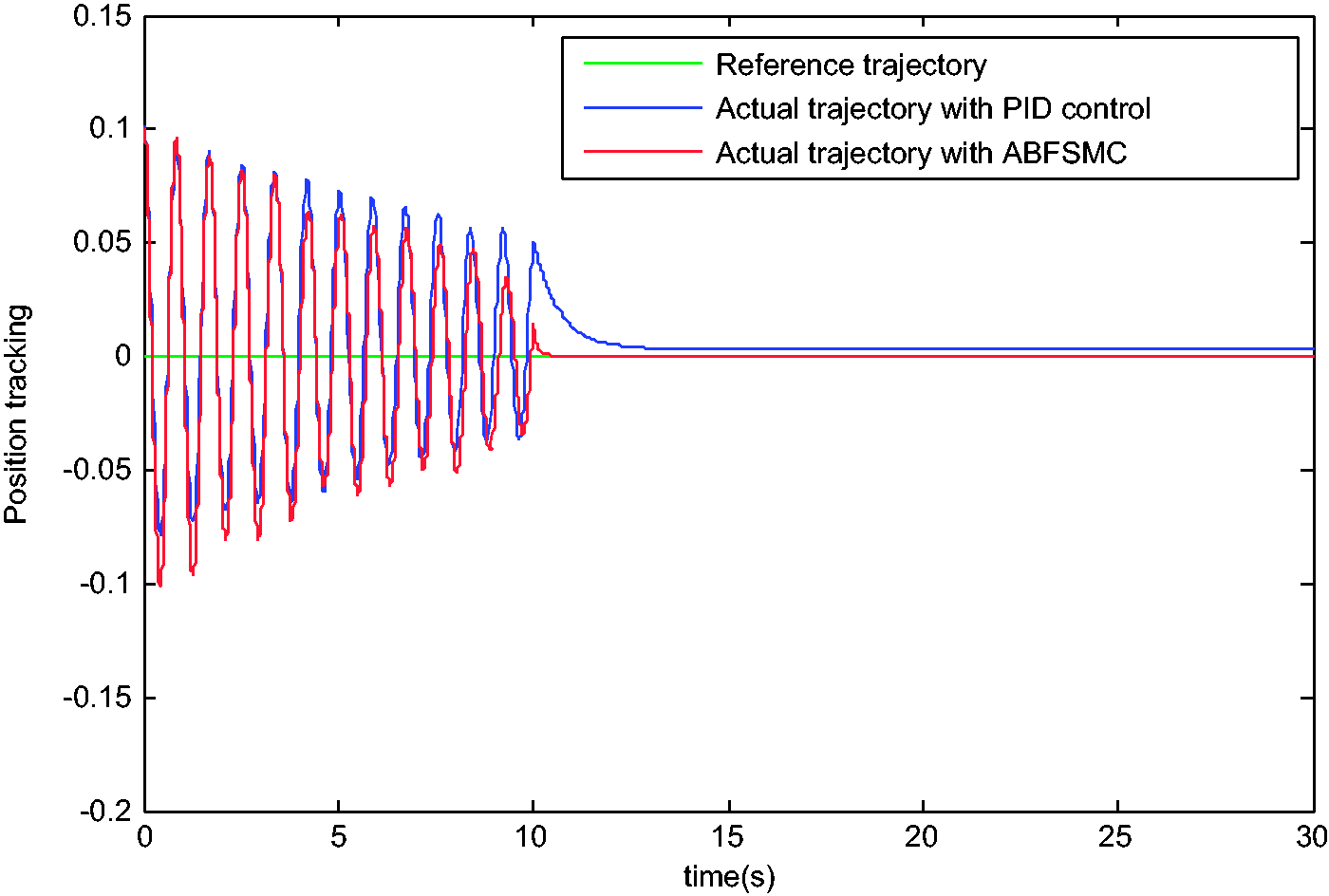
Vibration tracking comparisons of PD control with ABFSMC under steady disturbance.
Vibration tracking comparisons of PD control with ABFSMC under transient disturbance.
Simulation study with large steady and transient disturbances
In order to testify the vibration control performance and robustness of the vibration control system in the presence of large disturbance white noise disturbance
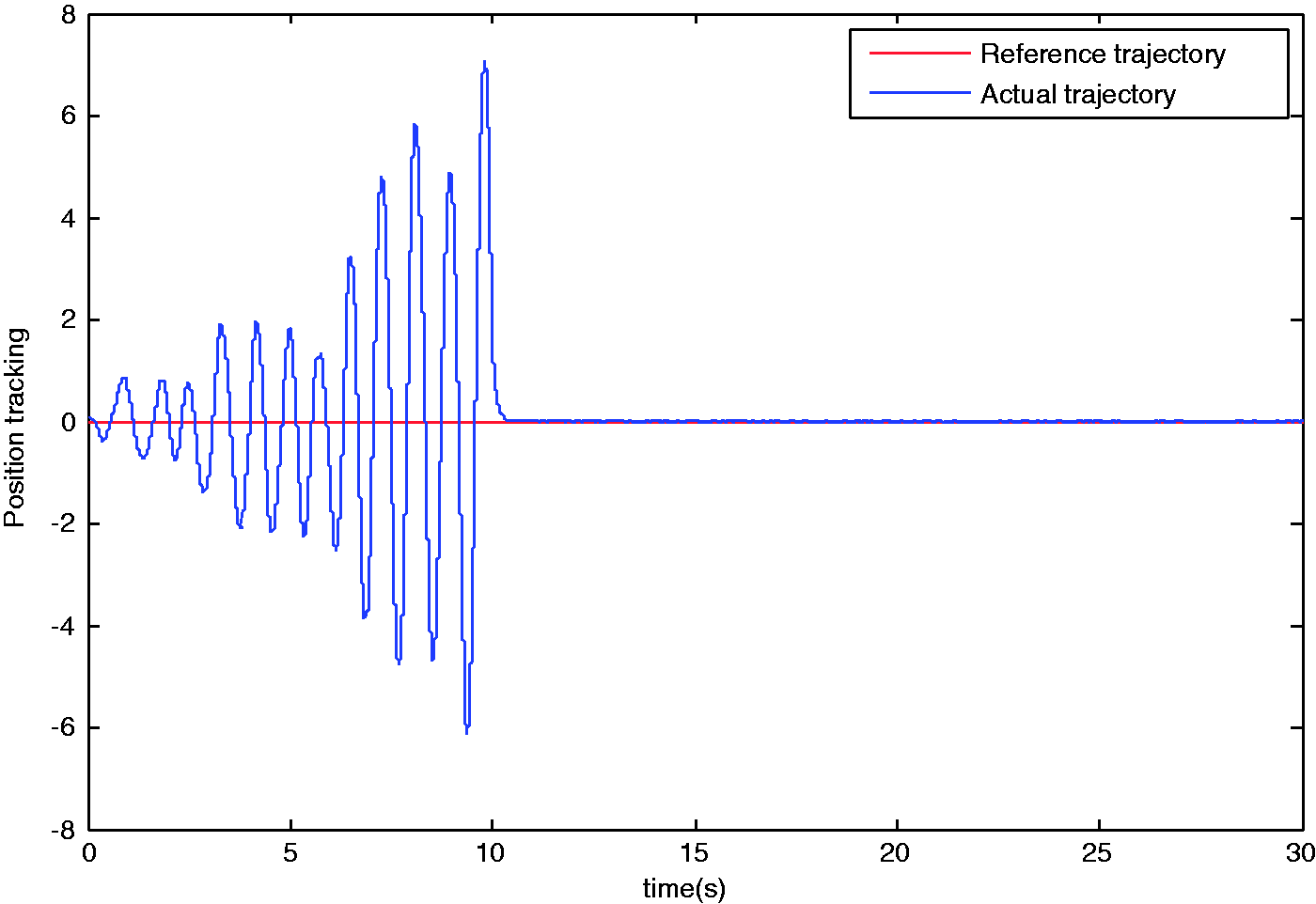
Vibration tracking under steady disturbance.
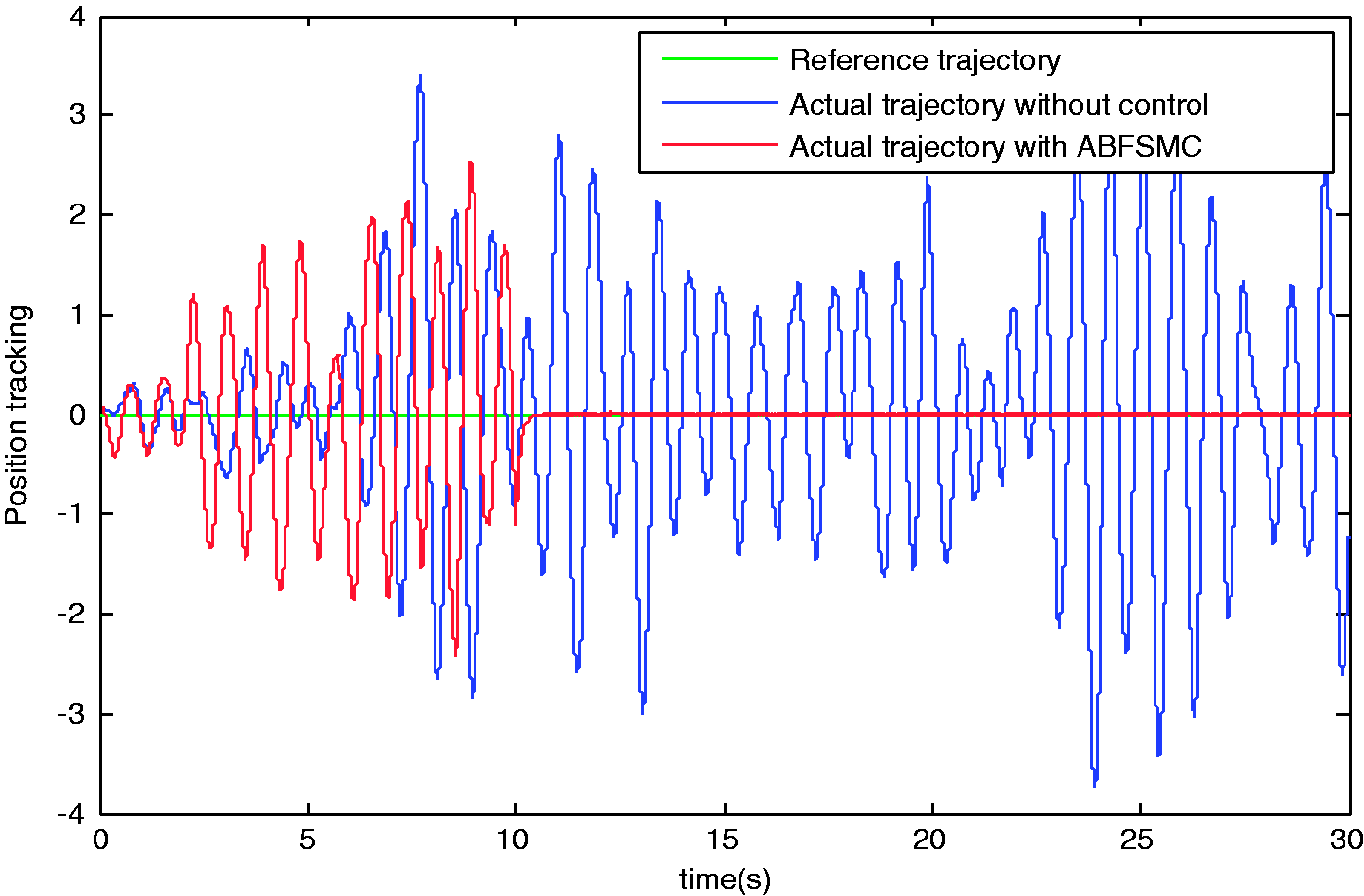
A comparison of the vibration control performance between ABFSMC and without control under steady disturbance.
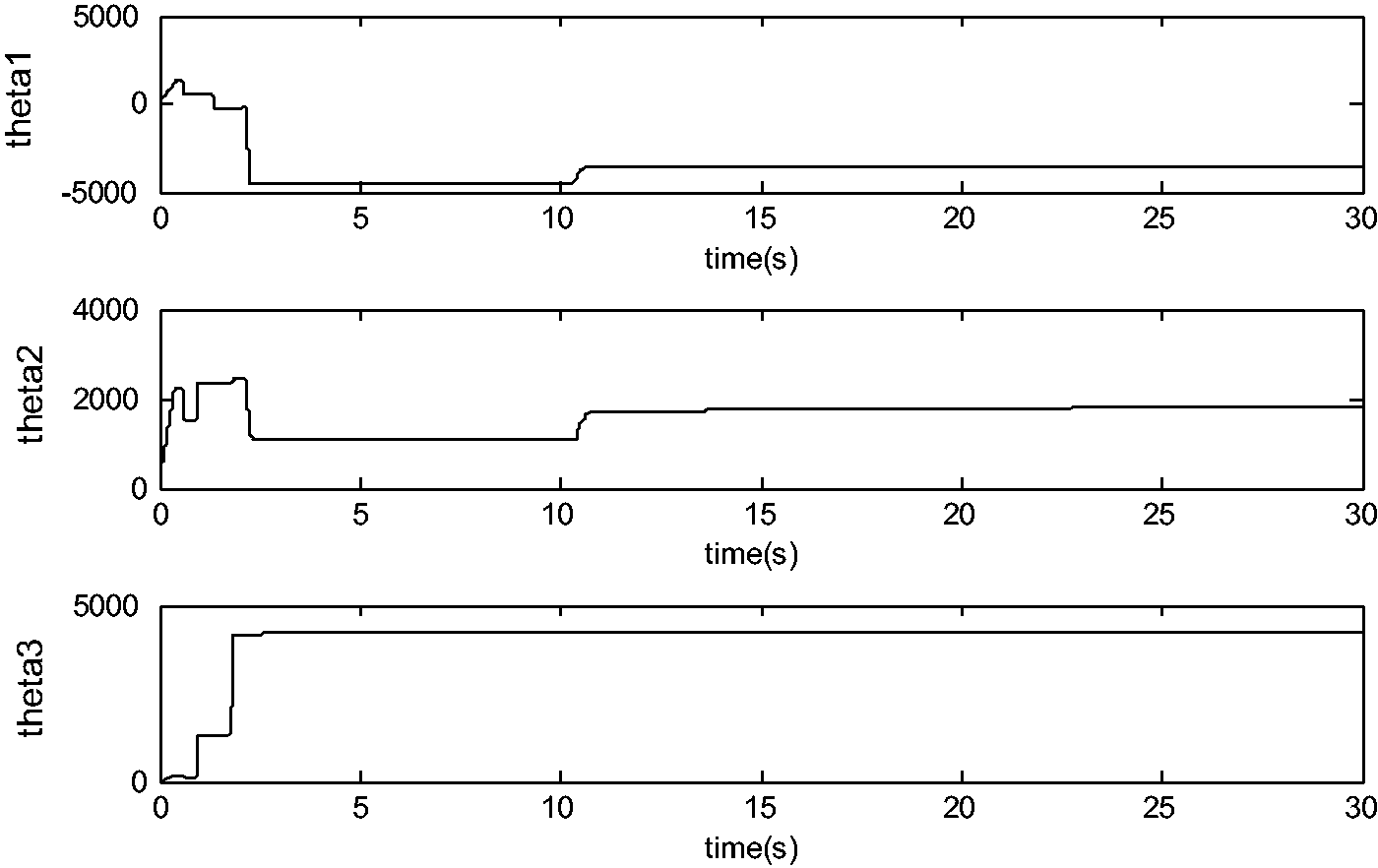
The adaptive fuzzy parameter under steady disturbance.
Similarly as in the previous section, white noise disturbance
Vibration tracking under transient disturbance.
A comparison of the vibration control performance between ABFSMC and without control under transient disturbance.
The adaptive fuzzy parameter under transient disturbance.
A comparison of the vibration control performance between ABFSMC under steady disturbance and ABFSMC under transient disturbance.
In comparison to PD control, from Figures 20 and 21, it can be also seen that the vibration tracking of ABFSMC converge to zero in about 1 s and the trajectory is much smoother, which improves the dynamic behavior of the cantilever beam and verifies that the designed control law can ensure the stability of the system.
Vibration tracking comparisons of PD control with ABFSMC under steady disturbance.
Vibration tracking comparisons of PD control with ABFSMC under transient disturbance.
Conclusion
An adaptive backstepping sliding mode controller using a fuzzy system to approximate the unknown system dynamics for a cantilever beam is presented. In the presence of unknown model uncertainties and external disturbances, sliding mode controller is employed to compensate such system nonlinearities and improve the tracking performance. The fuzzy algorithm is designed to guarantee bounded tracking errors. A backstepping controller is designed recursively by considering some of the state variables as “virtual controls” and designing intermediate control law to improve the robustness of the cantilever beam. Numerical simulation for cantilever beam is investigated to verify the effectiveness of the proposed ABFSMC scheme and demonstrate the satisfactory tracking performance and robustness. It is clearly shown that the function of the cantilever beam can be effectively approximated using the ABFSMC and the tracking error of the proof mass can be greatly improved.
Generally, controller spillover phenomenon occurs because the unmodeled dynamics, a robust control strategy based on H-infinity mixed sensitivity can suppress spillover instability. In the case of the unmeasured state, a state observer can be designed to get the feedback signals. In the next step, vibration control results will be presented in the frequency domain to check the stiffness and damping effect of the proposed controller. Other future works will be the experimental investigation and performance evaluation of the proposed controller in real-time system.
Footnotes
Acknowledgement
The authors thank the anonymous reviewers for their informative comments that have improved the quality of this paper.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work was partially supported by National Science Foundation of China [Grant No. 61374100]; Natural Science Foundation of Jiangsu Province [Grant No. BK20171198].