
Abstract
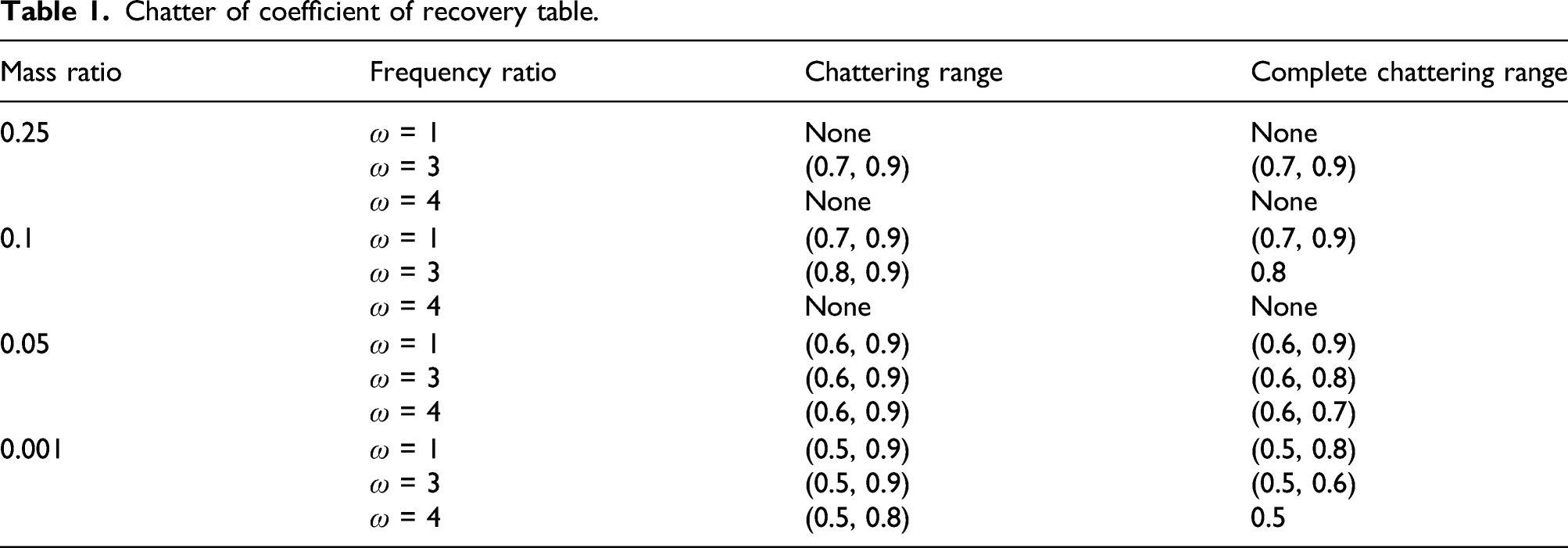
Based on the impact damper, a dynamic model of a non-fixed constrained collision system was established. The coefficient of restitution is used as the main control parameter to analyze the system’s periodic movement and its bifurcation region. The chattering movement characteristics of the system were revealed. The interval of restitution coefficient for the chattering of collision system under various mass ratio and frequency ratio was obtained. The results show that the chattering phenomenon occurs in the collision system when the coefficient of restitution is greater than 0.5; as the mass ratio decreases, the interval of restitution coefficient for chattering continues to expand; as the frequency increases, the interval of restitution coefficient for chattering narrows.
Introduction
Impact damper uses the collision between the free mass and the main system during the vibration process to control the main system’s responses.1–4 Usually, the current research findings on impact damper employ symmetry collision twice per period as the typical motion model.5,6 Based on the numerical stimulation, the author discovered that there were observable chattering phenomenon in the motion trajectory under the condition of better damping performance, that is, chattering might probably be a new, effective approach for the impact damper to achieve good damping performance. 7 The term chattering refers to a condition when there are multiple or even endless times of collisions between the free mass and the main system in a short period of time. There is no available guidance on chattering studies in impact damper, at present.
In regard to studies on chattering, Budd and Dux 8 conducted a systematical research on the chattering and viscosity motions of the single-freedom shock primary system under periodical excitation and deduced the existence of the system’s periodical chattering behavior as well as the relationship between the periodical chattering behavior and the chaotic motion. In Toulemonde and Gontier’s study 9 on dynamic behavior of the impact primary system of the harmonious excitation, the researchers identified viscosity motion and thereby conducted a study on the periodical viscosity motion for both single freedom and multiple freedom. Wagg and Bishop 10 researched the periodical movement, the chaotic chattering motion, and the viscosity motion in a harmonious-excitation two-freedom impact vibration system. Demeio and Lenci 11 studied an approximate calculation method of the chattering duration time in an inverted pendulum collision, and their study revealed that the chattering duration time was primarily associated with the amplitude instead of the excitation frequency or the damping ratio. Using experimental and numerical approach, Alzate and Bernardo 12 conducted a research on the chattering behavior of the impact model based on the gear transmission system. By introducing the local discontinuity mapping algorithm, Nordmark and Piiroinen 13 studied the stability and bifurcation of chattering behavior in collision system. Quintana and Ciurana 14 summarized the research progress, methodology, and classification of chattering in both industry and academic research. Besides, Hős and Champneys 15 studied the impact model based on the pressure relief valve, discussing the model’s bifurcation, chattering behavior, and the path from bifurcation to chattering. Feng et al. 16 studied the system’s complete chattering and non-complete chattering phenomena and in the meantime analyzed the chattering bifurcation in the system. Ding et al. 17 carried out an analysis on the sticking motion in a vibro-impact system with multiple constraints. By introducing a discontinuous pull-back mapping method, Wang et al. 18 studied the complete chattering of two-degree-of-freedom vibration system and obtained the chattering completion point and the chattering time. Zhu et al. 19 applied the numerical simulation method to their study on the chattering motion of two-degree-of-freedom with soft impacts.
At present, most of the research on the dynamics of collision vibration system was based on the multi-degree-of-freedom system with fixed constraints, and there was no research on the chattering of the nonlinear system without fixed constraints and the change law with the coefficient of restitution. Since the constraint in impact damper is a free mass, a non-fixed constraint model is needed. Therefore, the study of the chattering in impact damper in this paper differed significantly with the existing ones. In this paper, the dynamic model of the collision vibration system with non-fixed constraint was established. The periodic motion and bifurcation region of the system were analyzed with the coefficient of restitution as the main control parameter, and the chattering characteristics of the system were revealed. The restitution coefficient range of chattering of impact damper under different mass ratio and frequency ratio was obtained.
System dynamic model and differential equation of motion
Figure 1 shows a dynamic model of an impact damper. Combining the same mechanical properties of parts, it uses mechanical symbols: M1 as the mass of the chamber and external support, M2 as free mass, K as system stiffness, C as system damper, F as system excitation force, X as the displacement of M1, Y as the displacement of M2. M2 is inside M1. When F acts on M1, M1 and M2 will have relative collision, indicating the confirmation of displacement difference between them. As K and C act on M1 and exert controlling force on the movement of M1, energy exchange occurs one another among C/K/M1/M2. Energy consumption of plastic transformation occurs between M1 and M2, and C also consumes part of energy. Non-fixed constrained collision vibration system.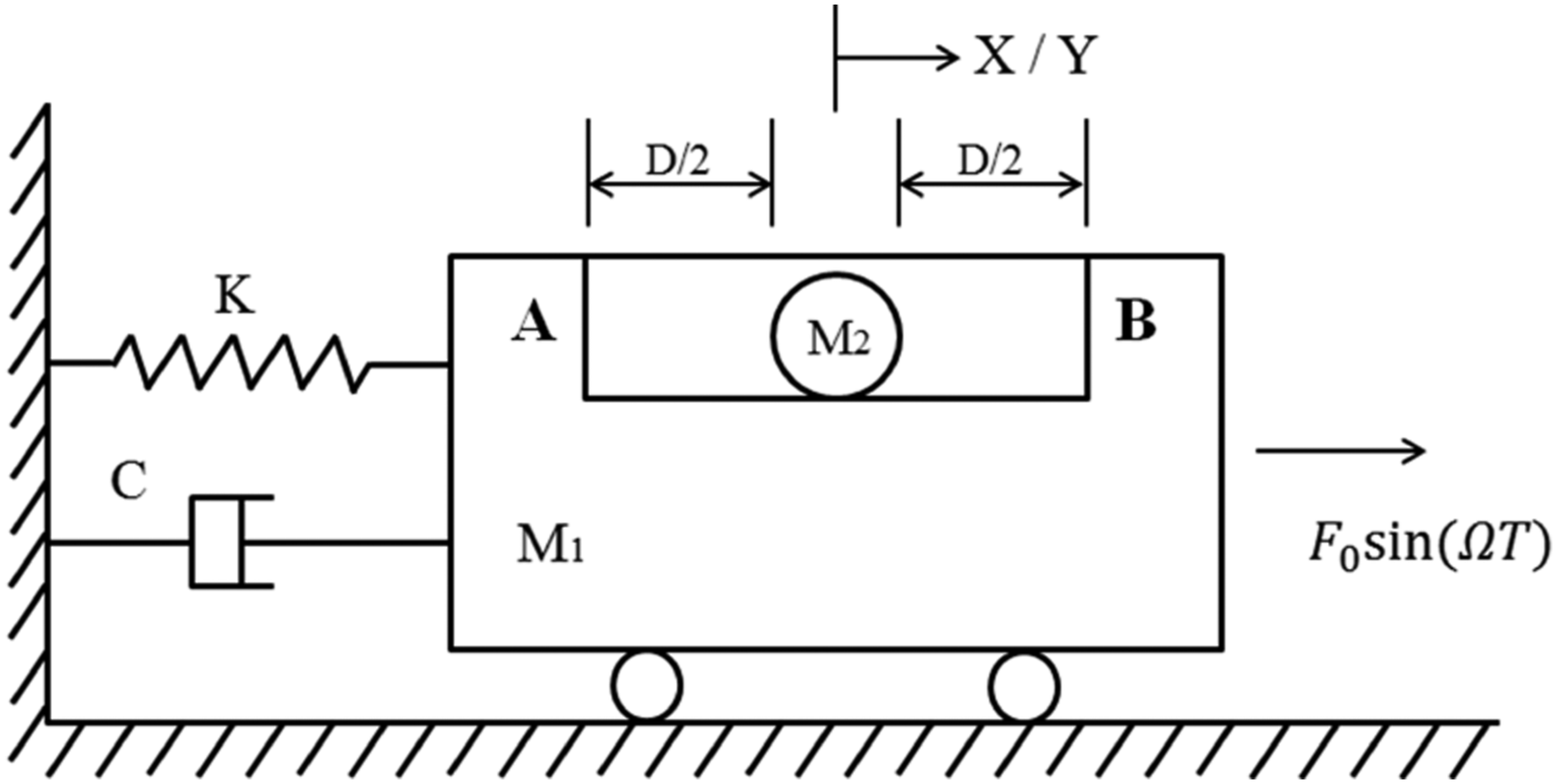
For the convenience of calculation, several basic hypotheses are proposed: 1.Free mass (the impactor) only moves horizontally along the chamber, with friction coefficient f = 0; 2.The friction coefficient between M1 and the ground f = 0; 3.At this moment, the free mass is regarded as mass point; 4.The collision process is determined by the restitution coefficient, r, and the collision is instantaneous.
When there is no collision, the movement differential equation of vibrator M1 is







Based on equations (5) and (6), the analytical expression of the speed after collision can be obtained







Before the collision, the movement status of the vibrator and the small ball is shown in the equations. When the collision occurs, the movement will change, and thus, it is acceptable to define the time before and after the collision. For example,
Analysis on the system bifurcation movement
A collision vibration system is usually a multi-parameter system. When one or several parameters change to a certain critical value, the number and stability of the periodic solution will change, resulting in the so-called bifurcation phenomenon. This phenomenon can only be calculated and observed through computer. By numerous bifurcations, the system may enter a chaos state. As the control parameter during collision, the coefficient of restitution helps simplify many problems. To determine the collision process by the coefficient of restitution means the changes of speed and energy will generate a jump, which has an enormous influence on both bifurcation and chattering.
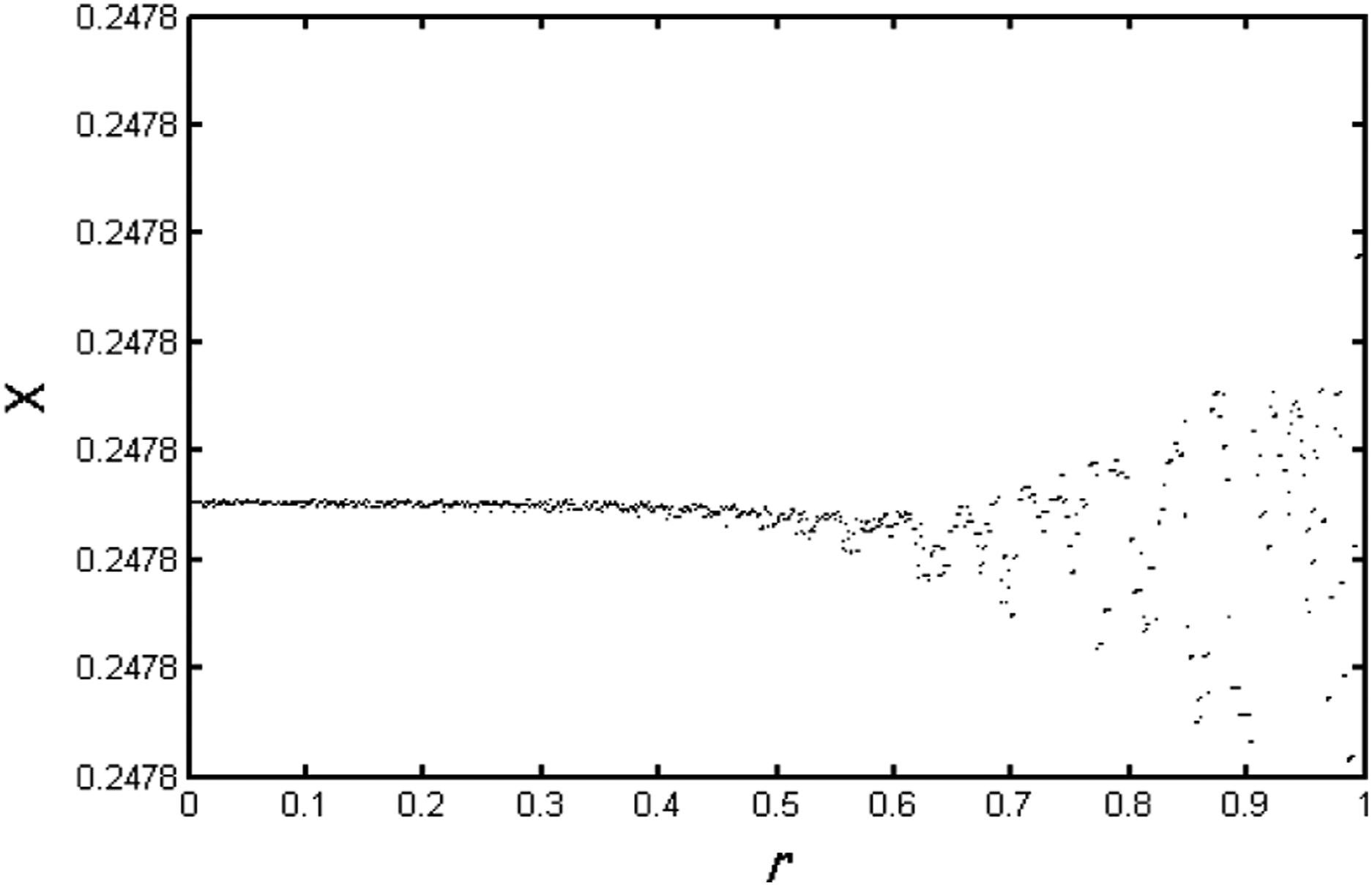
The bifurcation and chaos actions in the collision vibration system use r as the bifurcation parameter. The results based on numerical integration are the bifurcation diagram of the system response, Poincare mapping figure, phase plane portrait, and time-domain waveform figure.
Figures 2 and 3 are the global bifurcation diagrams with different mass ratio. It can be seen from the figures that, after r = 0.5, the system generally has a large area of bifurcation and the area enlarges constantly. Bifurcation diagram of Bifurcation diagram of 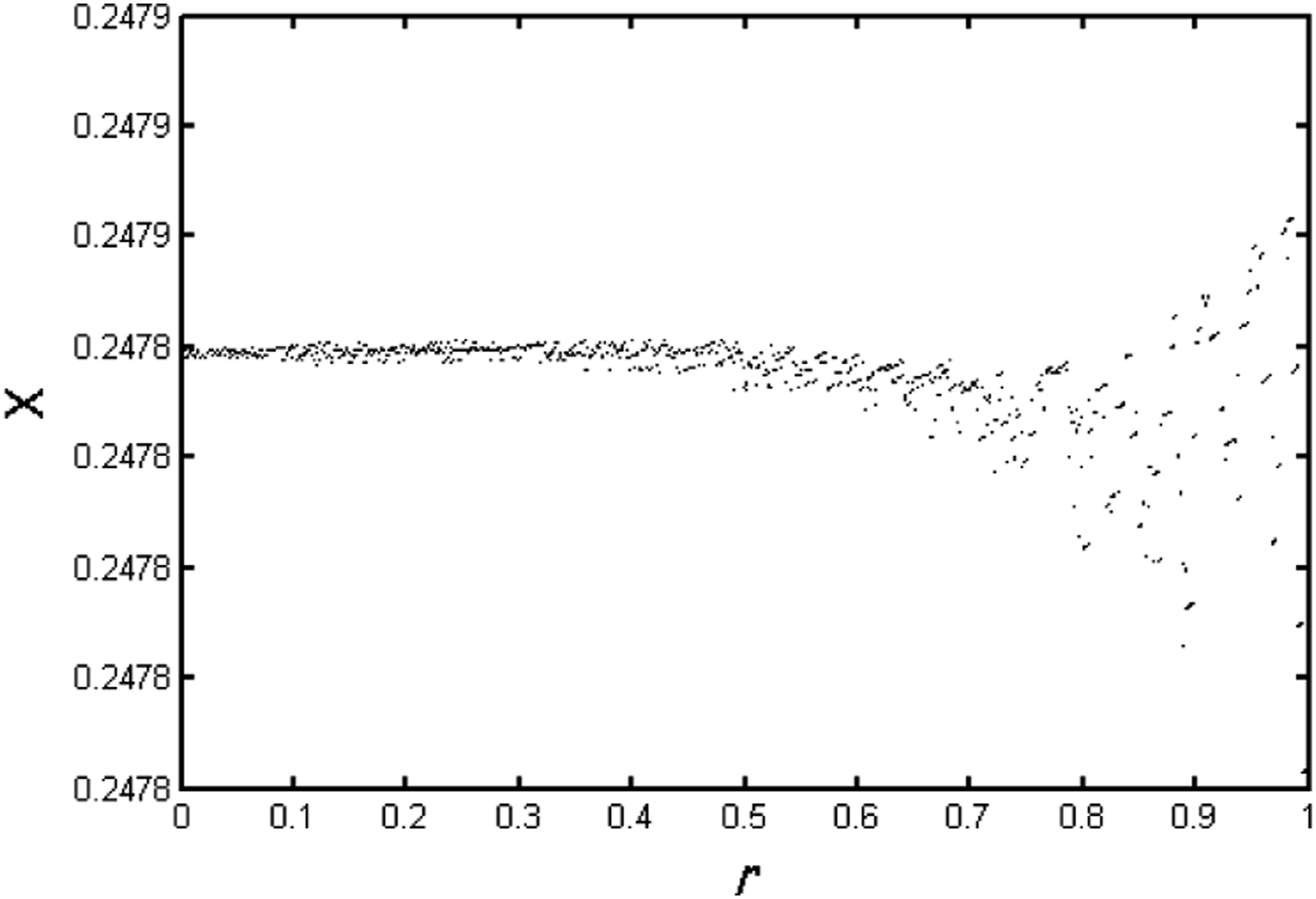
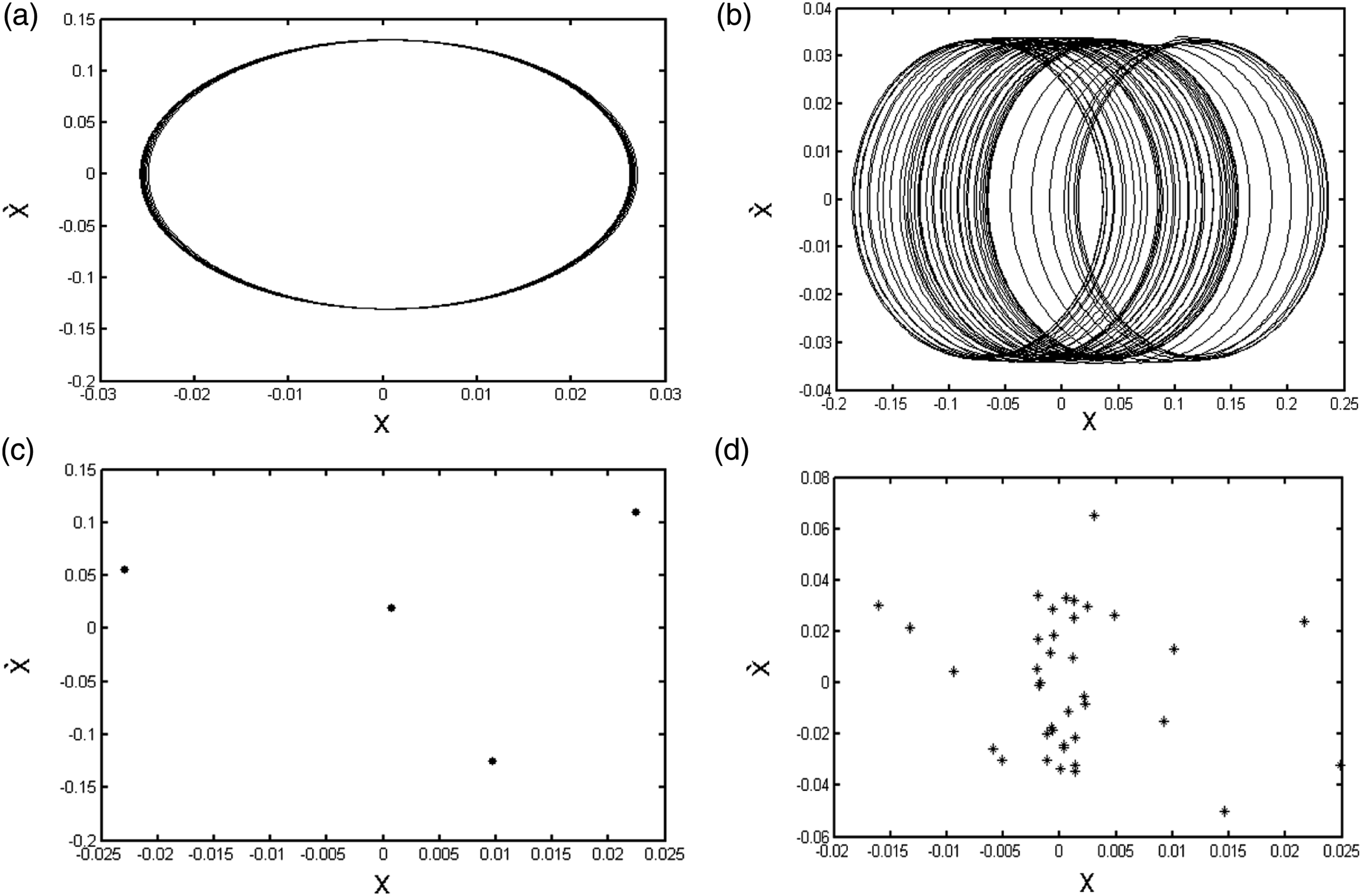
In order to better observe the bifurcation condition, phase plane portraits and Poincare mapping diagrams are shown in Figures 4 and 5. To select a specific point before and after the bifurcation, when r = 0.2 and r = 0.8, it can be seen respectively that the system bifurcation has a significant difference before and after r = 0.5, while the system is under periodic or quasi periodic movement. The system enters a chaos movement after r = 0.5. The chattering phenomenon happens mostly in areas where bifurcation is intensive. Below is a study on the chattering behavior in the bifurcation interval. Bifurcation of r as bifurcation parameter ( R as the bifurcation parameters diagram (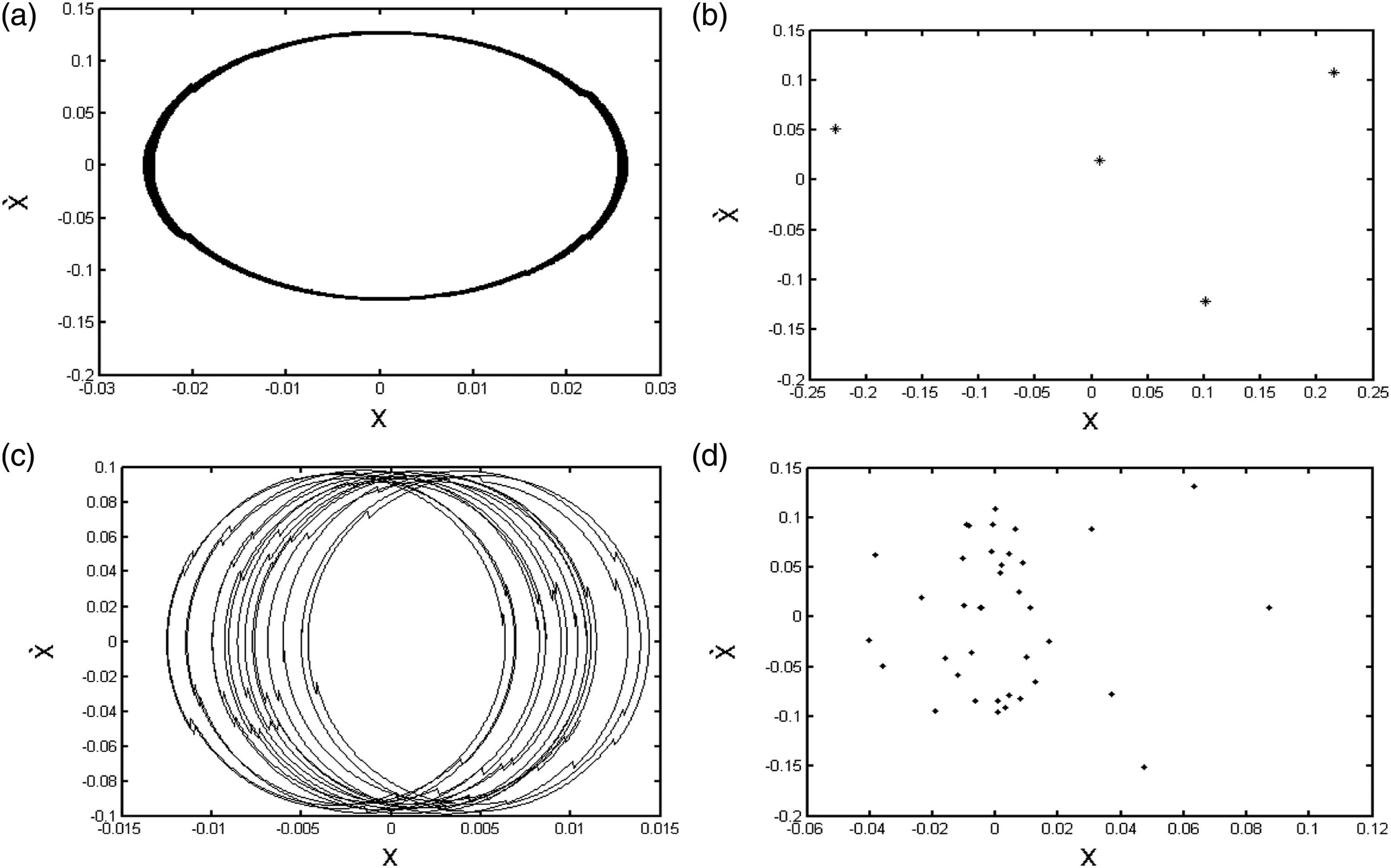
Analysis of the system chattering movement
In the previous section, a thorough analysis of the bifurcation phenomenon of a bilateral dynamic constraint system was conducted, and this section will study the influence of the coefficient of restitution on chattering. The chattering phenomenon is a branch of non-smooth dynamic system study, as well as a common phenomenon of non-smooth system. In order for the chattering in a collision vibration system, the impactor must remain a series of low-speed collision motions. If the speed of this series of collision motions eventually approaches zero and remains relatively still compared to the constraint, the chattering turns into viscosity. As the system relative collision happens over 5 times (including 5), it is considered as chattering. When there is viscosity after chattering, it is called complete chattering and otherwise is non-complete chattering. To set up the parameter,
Figures 6–8 are the time-domain waveforms with different coefficient of restitution when the mass ratio is 0.25. Different r of time-domain waveform figure ( Different r of time-domain waveform figure ( Different r of time-domain waveform figure (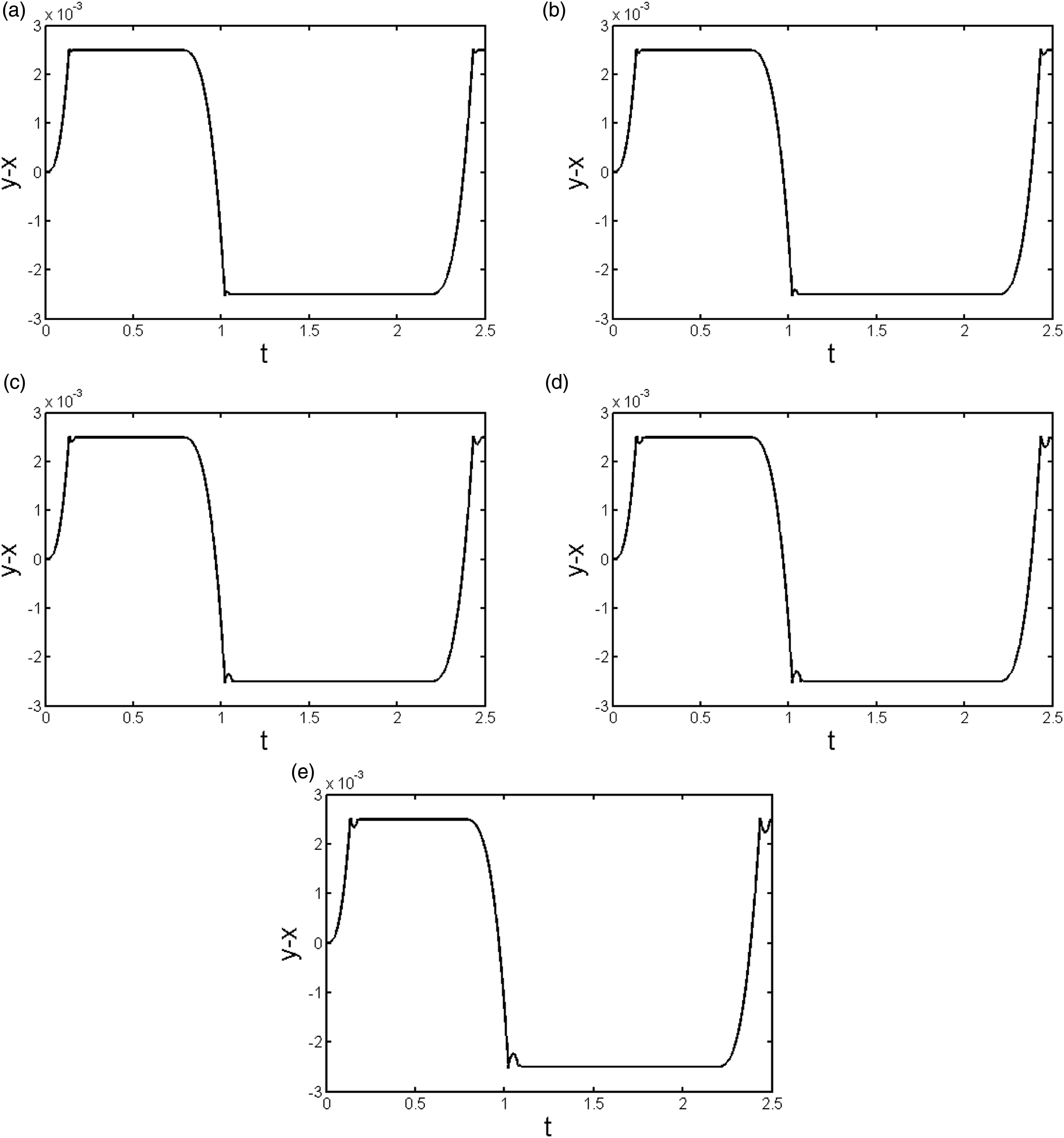
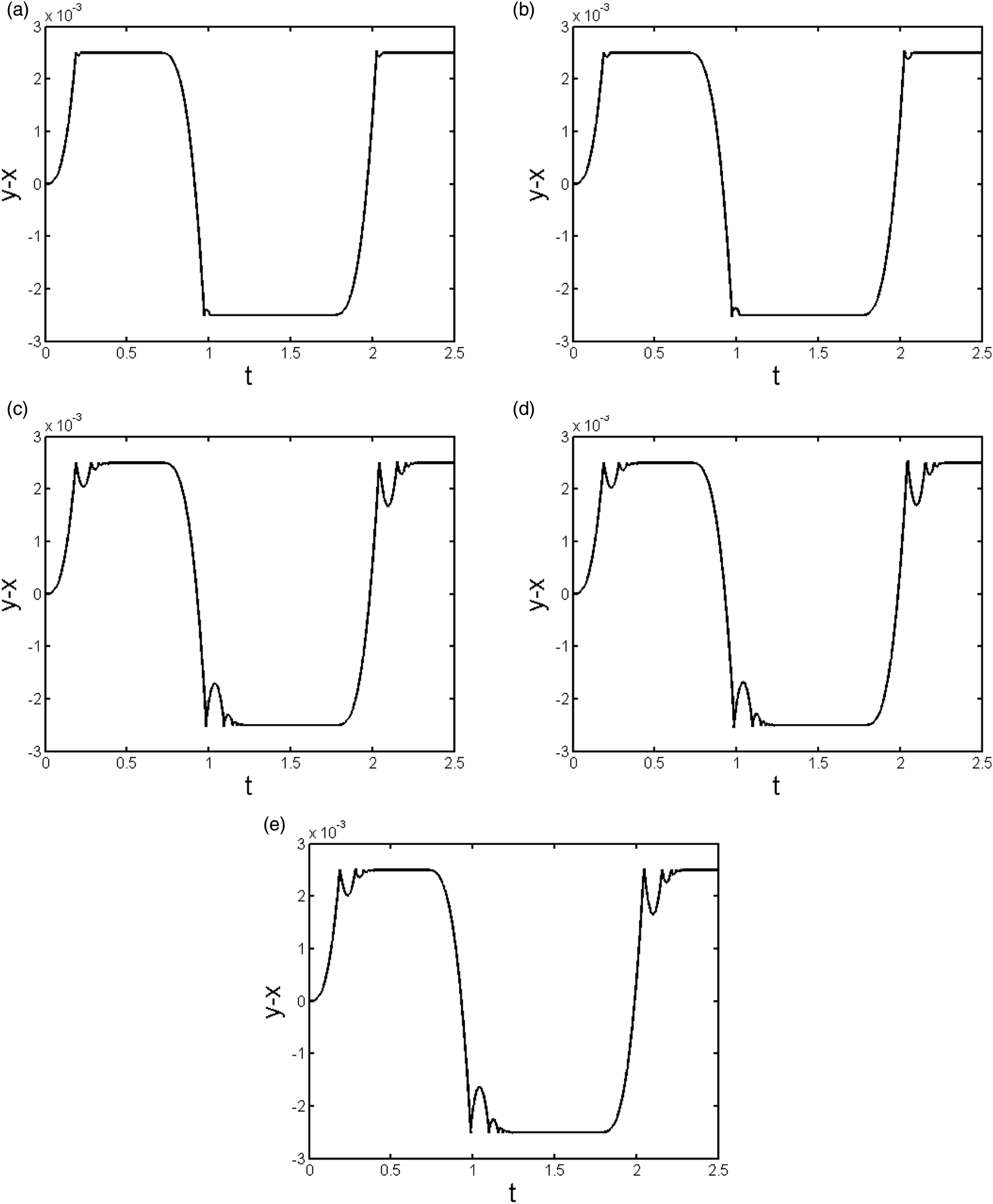
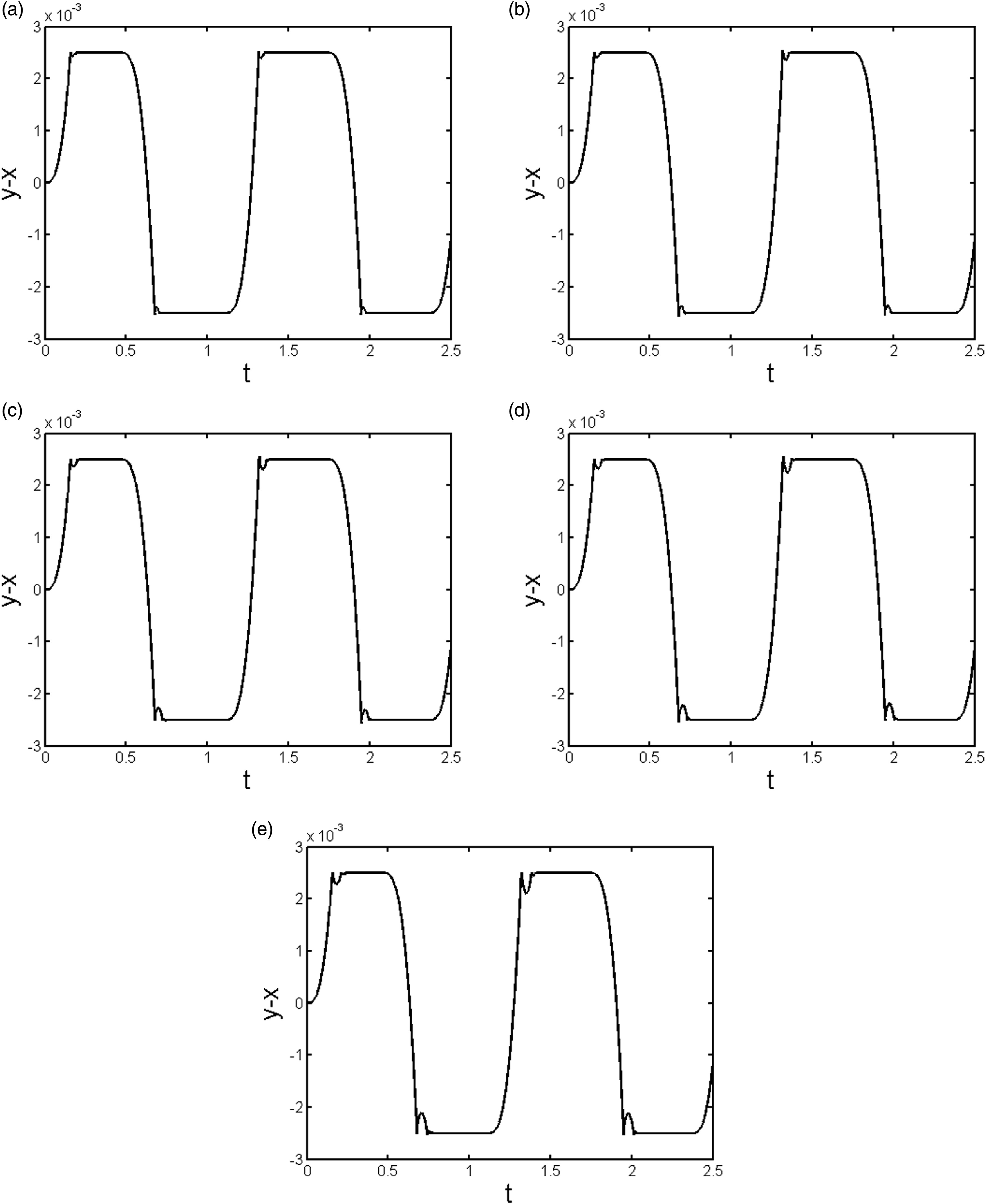
Figure 6 is the time-domain waveform with different coefficient of restitution when
Figure 6 is the time-domain waveforms with different coefficient of restitution when
Figure 8 is the time-domain waveform with different coefficient of restitution when
Figures 9–11 are the time-domain waveforms f with different coefficient of restitution when the mass ratio is 0.1. Different r of time-domain waveform figure ( Different r of time-domain waveform figure ( Different r of time-domain waveform figure (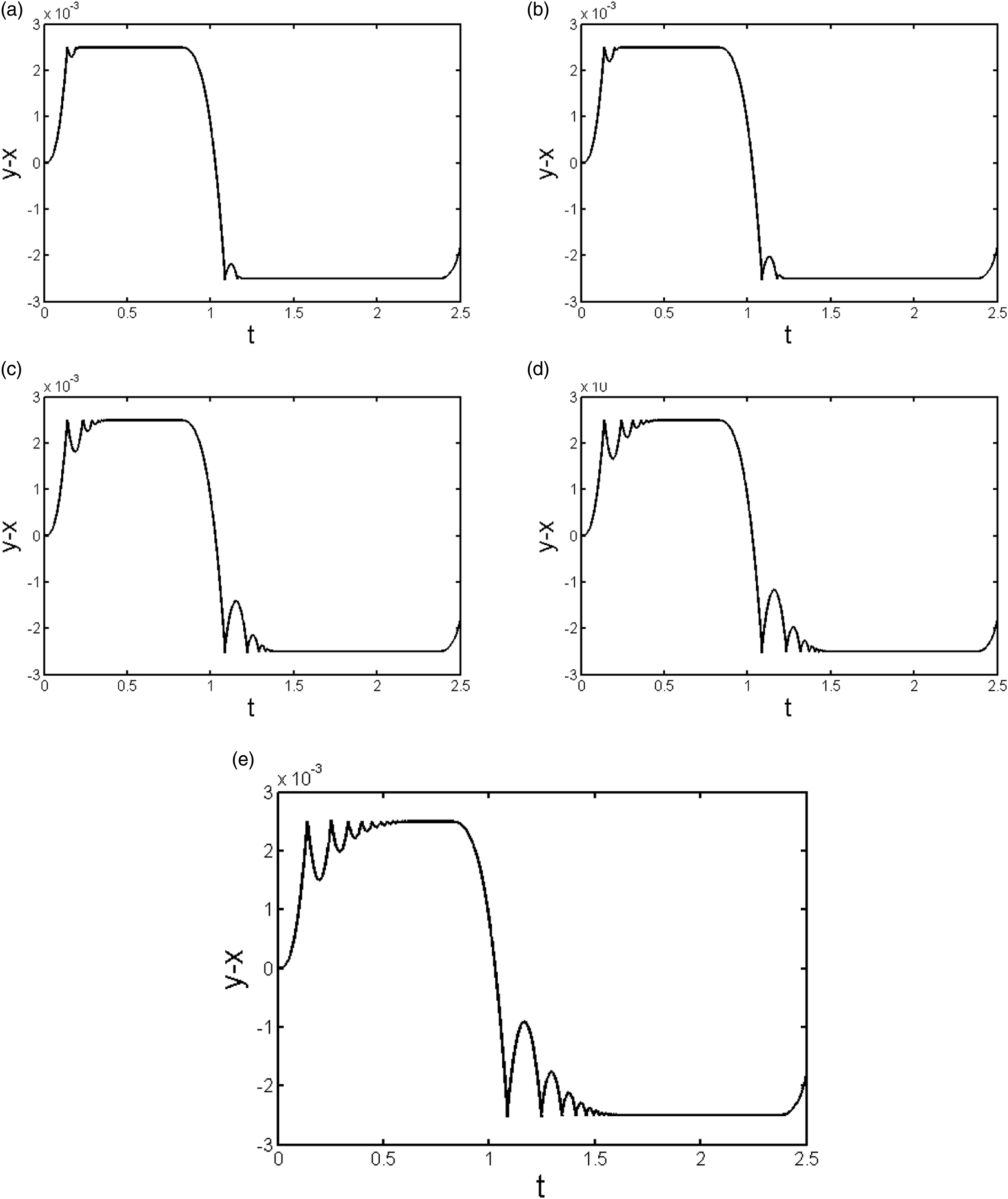
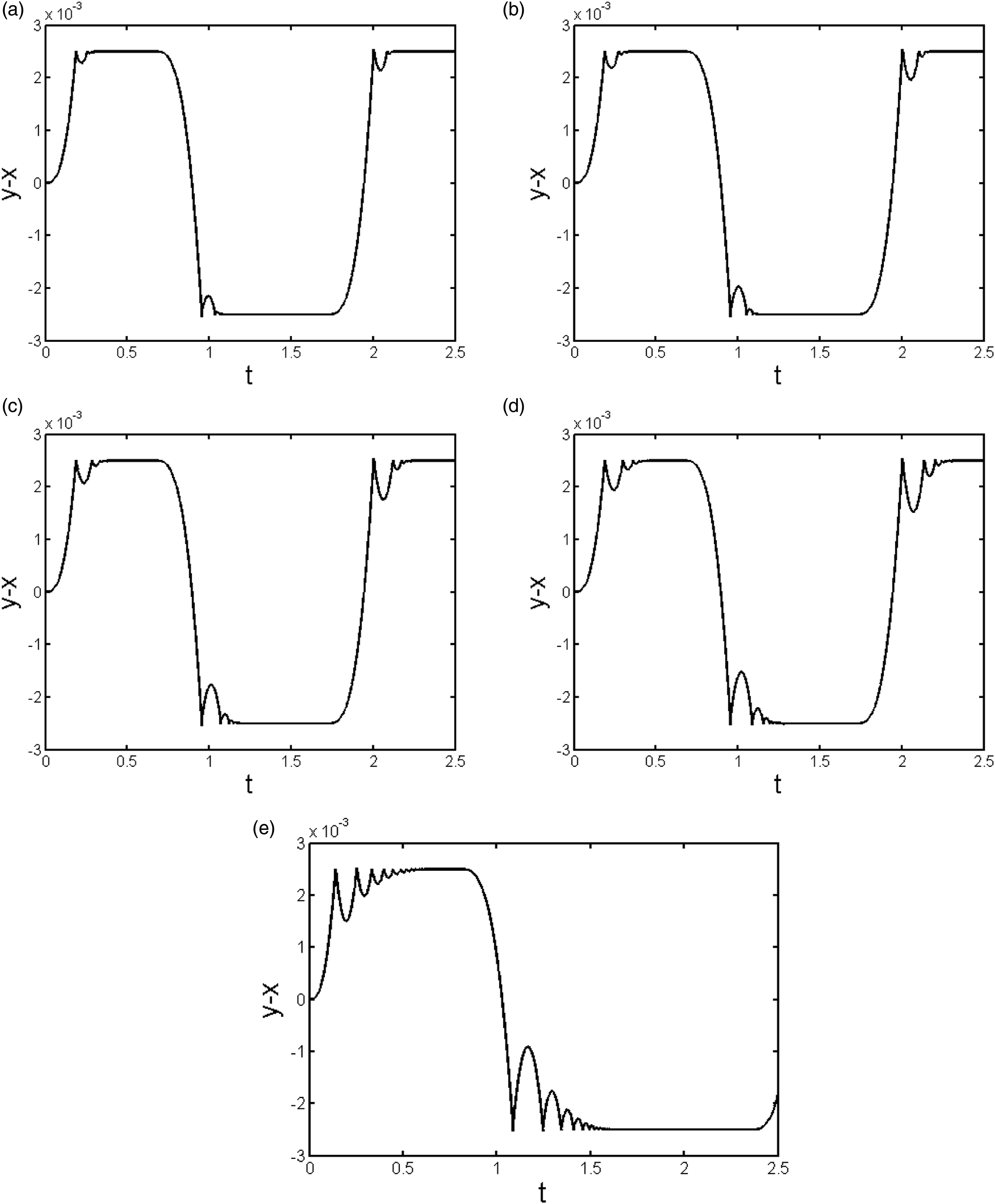
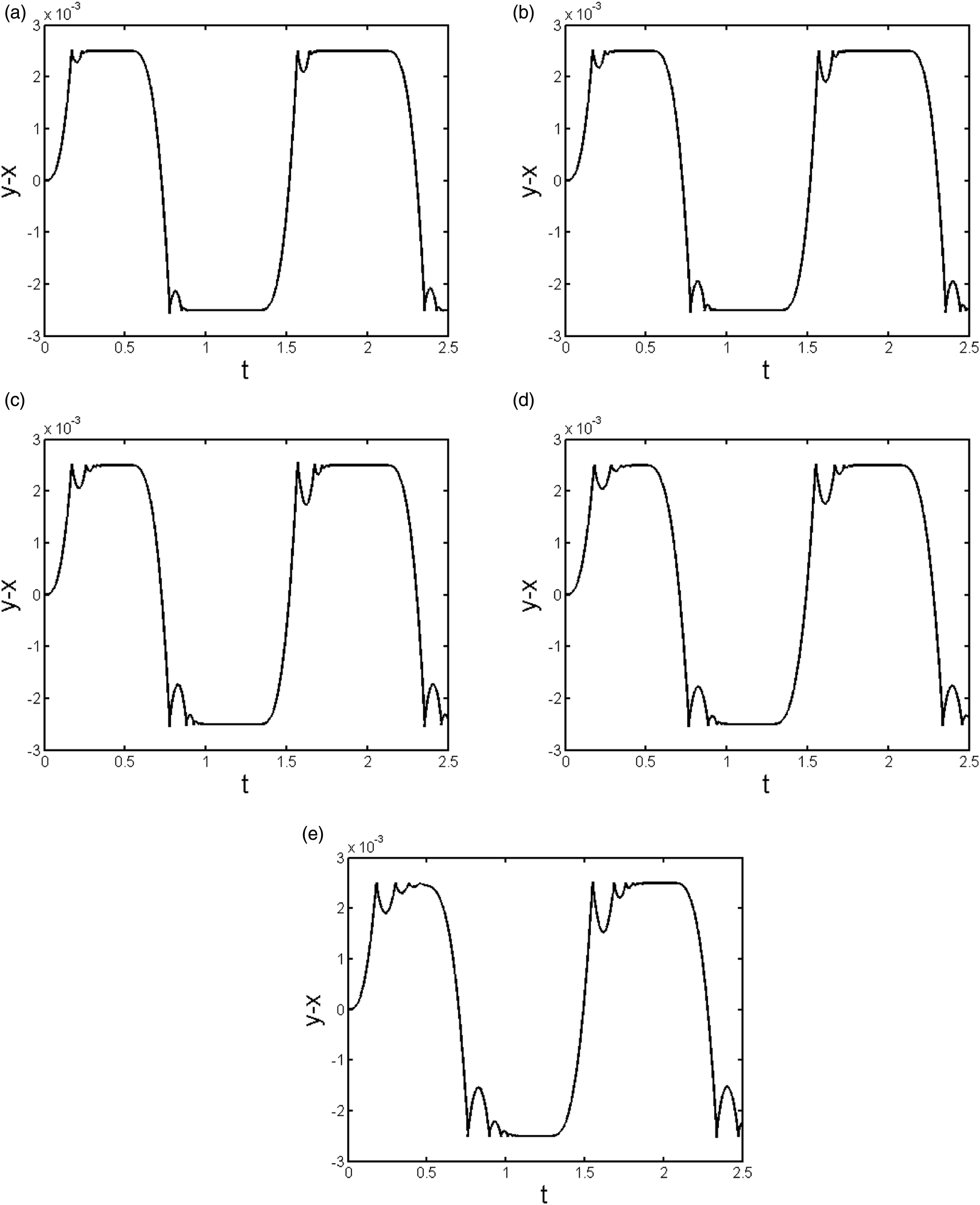
Figure 9 is the time-domain waveforms with different coefficient of restitution when
Figure 10 is the time-domain waveforms with different coefficient of restitution when
Figure 11 is the time-domain waveforms with different coefficient of restitution when
Figures 12–14 are the time-domain waveform figures of different coefficient of restitution when the mass ratio is 0.05. Different r of time-domain waveform figure ( Different r of time-domain waveform figure ( Different r of time-domain waveform figure (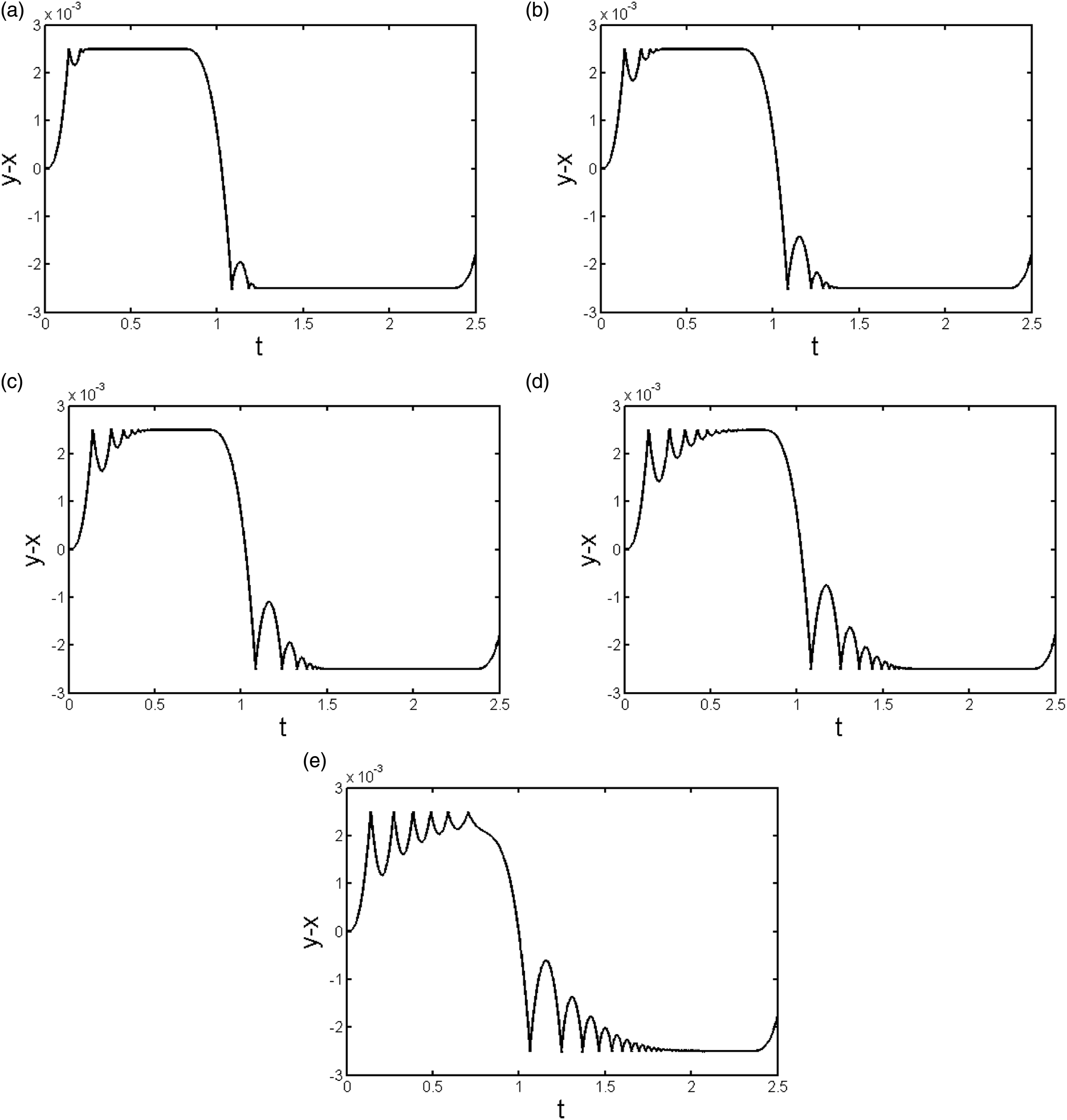
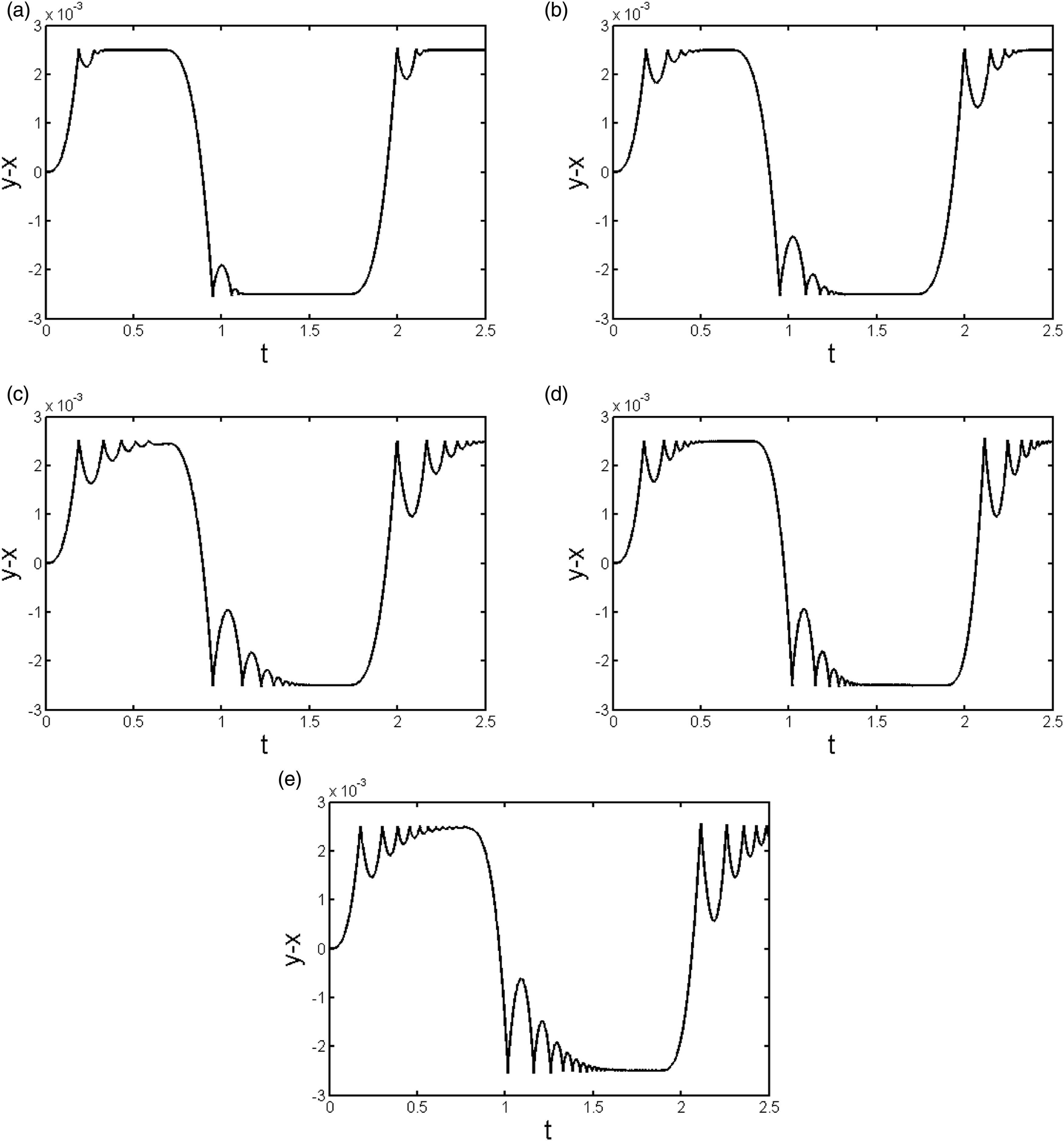
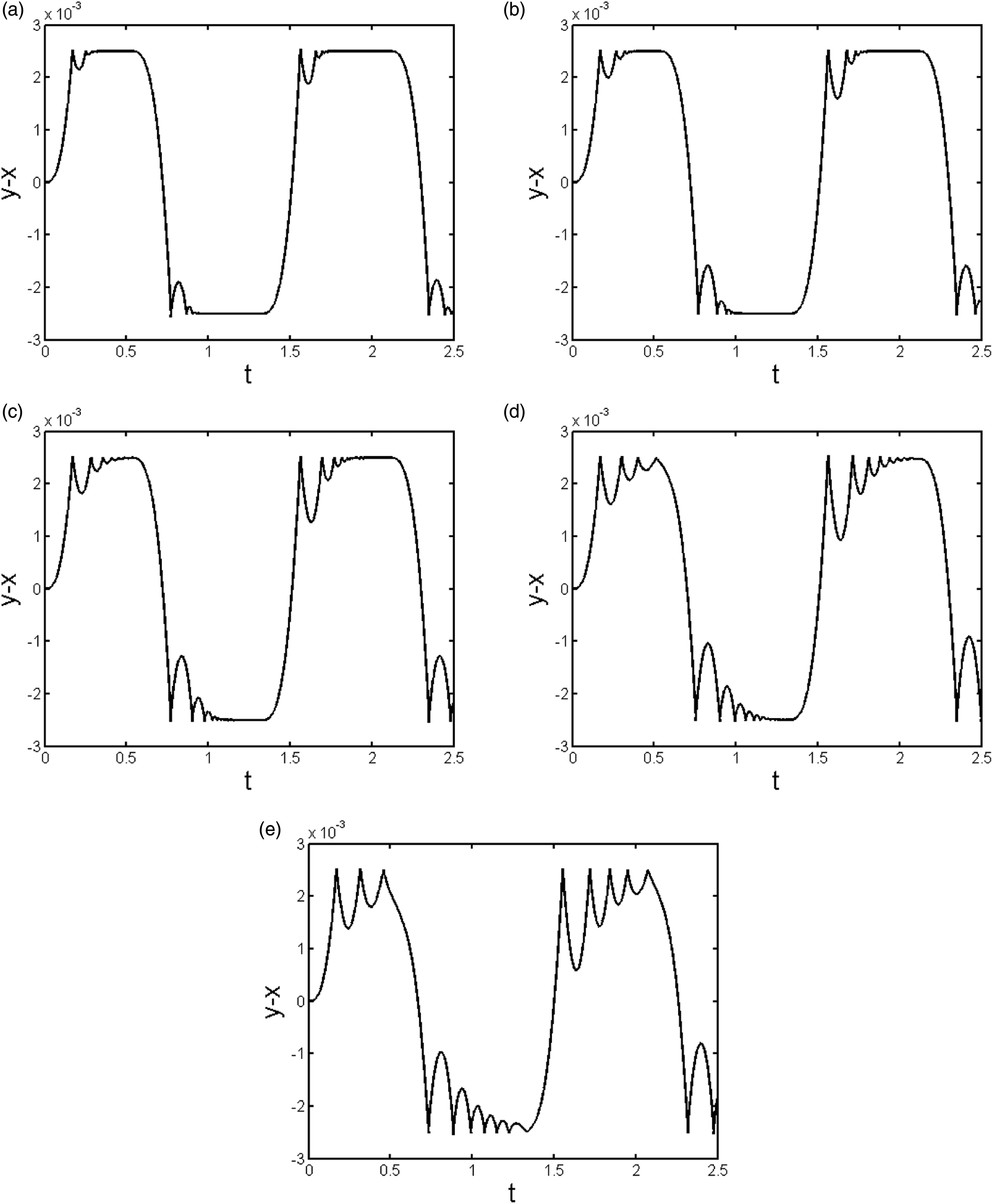
Figure 12 is the time-domain waveform with different coefficient of restitution when
Figure 13 is the time-domain waveform with different coefficient of restitution when
Figure 14 is the time-domain waveform with different coefficient of restitution when
Figures 15–17 are the time-domain waveforms with different coefficient of restitution when the mass ratio is 0.001. Different r of time-domain waveform figure ( Different r of time-domain waveform figure ( Different r of time-domain waveform figure (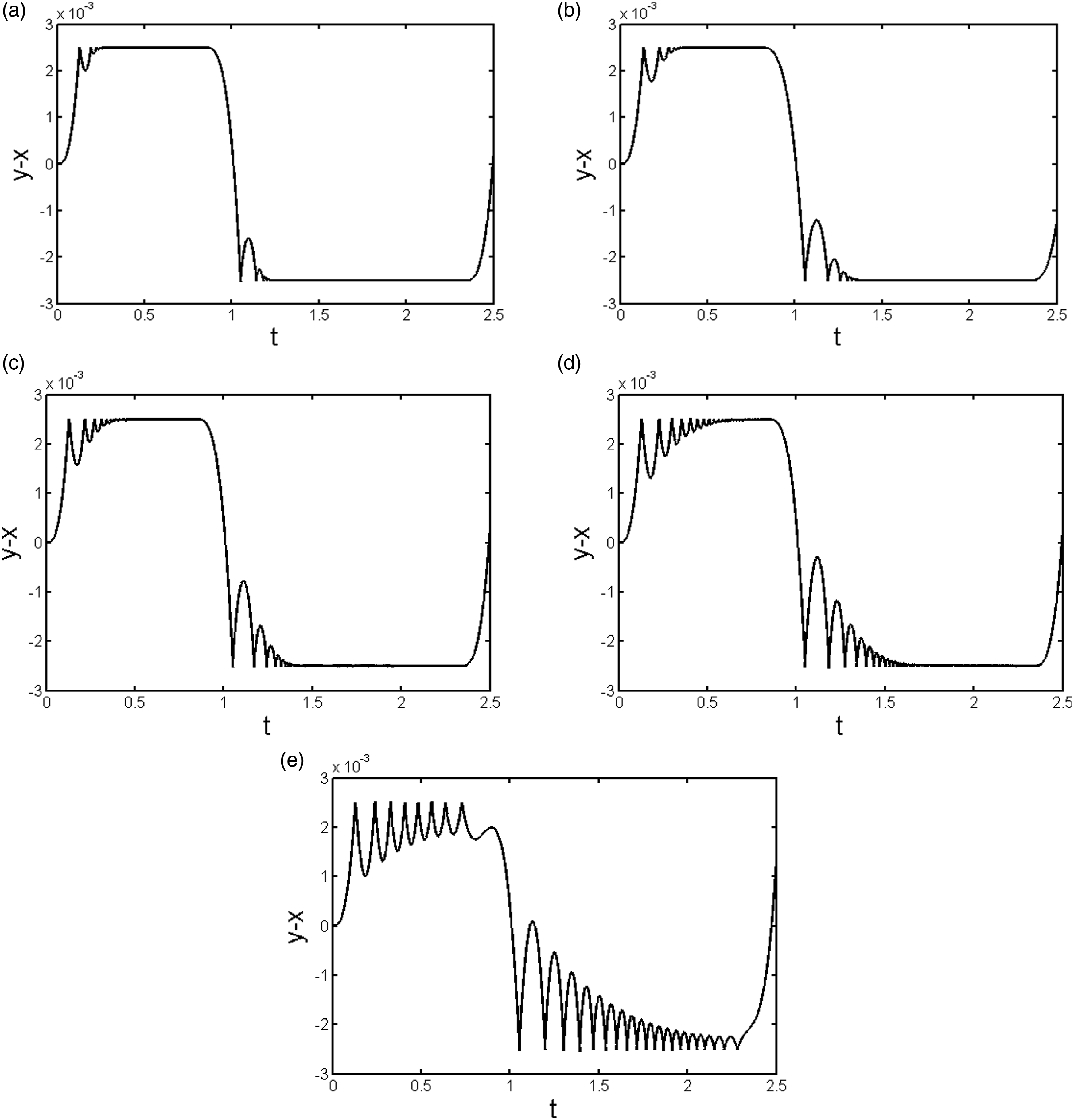
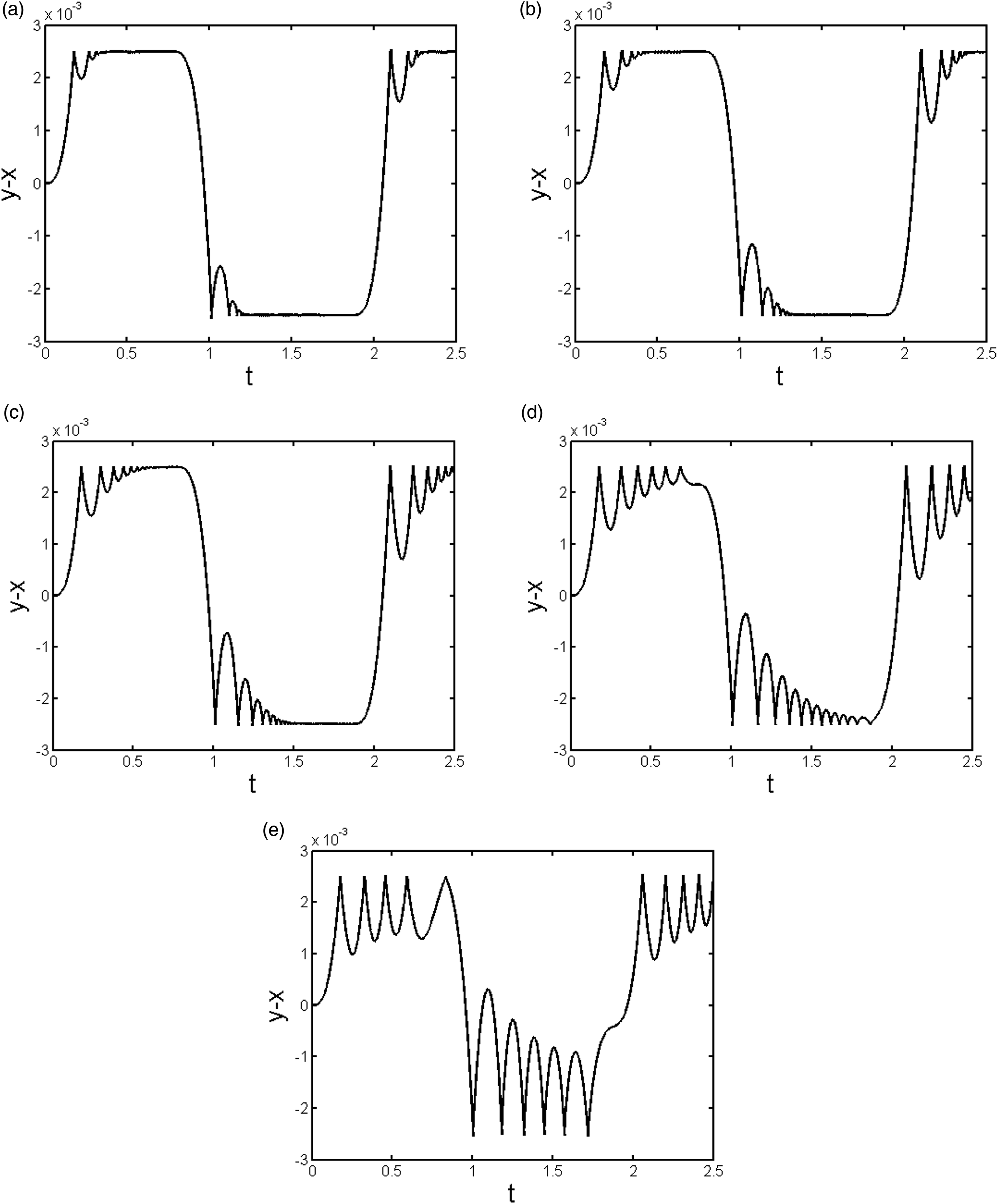
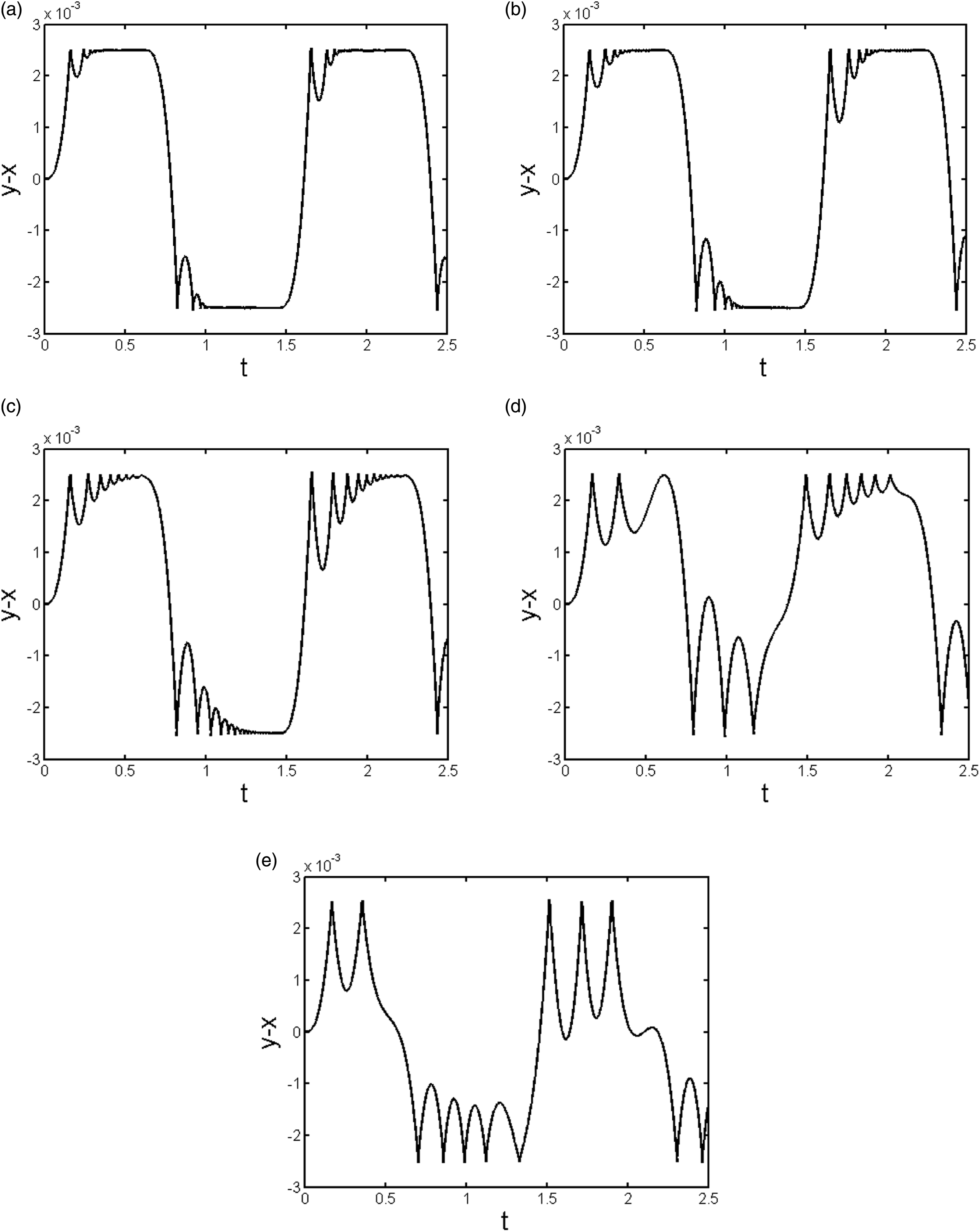
Figure 15 indicates the time-domain waveform figure of different coefficient of restitution when
Figure 16 indicates the time-domain waveform figure of different coefficient of restitution when
Figure 17 indicates the time-domain waveform figure of different coefficient of restitution when
Chatter of coefficient of recovery table.
Conclusion
In this paper, a global bifurcation map is obtained by continuously changing the parameter value of the restitution coefficient by establishing a mechanical model of a non-fixed constrained collision vibration system, and from this, a phase diagram, a Poincare map, and a time-domain diagram under each restitution coefficient are obtained. The interval of restitution coefficient for the chattering of impact damper under different mass ratio and frequency ratio is obtained. (1) Based on the bifurcation diagrams of the coefficient of restitution, when coefficient of restitution is greater than 0.5, there is obvious bifurcation phenomenon occurring in the system, and the bifurcation area constantly expands. (2) By analyzing the system time-domain waveform figure under different coefficient of restitution, it shows that the coefficient of restitution for chattering is between 0.5 and 0.9, and as the mass ratio decreases, the interval of restitution coefficient for chattering continuously expands; as the frequency ratio increases, the interval of restitution coefficient for chattering narrows. (3) The material with large coefficient of restitution is easy to chatter under the condition of small mass ratio.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article. This work was supported by the National Natural Science Foundation of China (grant no. 51475308) and the National Key R&D Plan of China (grant no. 2016YFD0700900).