
Abstract
The combination of dynamic vibration absorber and partial state feedback with time-delay is called delayed resonator. In order to suppress the seat vibration caused by uneven road surface and improve ride comfort, the delayed resonator is applied to the seat suspension to realize active control of the seat suspension system. The dynamic model of the half-vehicle suspension system is established, and the time-delay differential equation of the system under external excitation is solved by the precise integration method. The root mean square of the time-domain vibration response of seat displacement, seat acceleration and vehicle acceleration are selected as the objective function. Then, the optimal time-delay control parameters are obtained by particle swarm optimization algorithm. The frequency sweeping method is used to obtain the critical time-delay value and time-delay stable interval of the system. Finally, an active seat suspension model with delayed resonator is established for numerical simulation. The results show that the delayed resonator can greatly suppress the seat vibration response regardless of the road simple harmonic excitation or random excitation. Compared with dynamic vibration absorber, it has a better vibration absorption effect and a wider vibration reduction frequency band.
Introduction
Recently, research on the suppression of vehicle vibration has been widely carried out. For some commercial and heavy vehicles, the continuous vibration caused by uneven road surfaces seriously affects the physical and mental health of drivers and passengers and endangers driving safety. 1 At present, the reduction of vehicle vibration is mainly achieved by adjusting tires, vehicle suspension, and seat suspension. By modeling the vehicle frame and engine suspension, Tan et al. 2 proposed a new model of the whole vehicle, which can better reflect the dynamic characteristics of the vehicle system and effectively reduce the vibration transmitted from the engine to the vehicle frame. Relevant studies have shown that the ride comfort of vehicle can be improved by reducing the vertical stiffness of the tire or reducing the tire pressure. However, the reduction in tire pressure increases the rolling resistance of the tire and causes great heat release, which reduces the lifespan of the tire. Vehicle suspension is the main damping system, but the cost for control and adjustment of it is high. The seat suspension is in direct contact with the driver or passenger and the change of it hardly affects other performances of the vehicle. Therefore, the improvement of the seat suspension system is of great significance for improving passenger comfort and vehicle ride comfort.
Passive seat suspension cannot meet the real-time adjustment of stiffness and damping, so that the vibration reduction performance is greatly limited. Therefore, various controllable active and semi-active seat suspensions have been developed.3-6 The magnetorheological damper is widely used in the seat suspension system, which has many advantages such as low energy consumption, low manufacturing cost, and good controllability. 7 Gan et al. 8 proposed an active seat with double electric cylinders to reduce the low-frequency vibration transmitted to the driver. However, in all control systems, there are inevitably time-delay problems in some signal acquisition and transportation, information processing of arithmetic units, and execution of actuators. The existence of it makes the dynamic response of the system more complicated and even leads to bifurcation and chaos in the system, which eventually affects the safety. 9
Dynamic vibration absorber (DVA) is a kind of equipment that uses a resonance system to absorb the vibration energy of objects. It has been widely used in various industries such as transportation, industrial machinery, and aerospace.
10
The core of the DVA is the attachment of a mass-spring-damper resonance system to the vibrating object, and its structure diagram is shown in Figure 1 (a). The DVA with time-delay feedback control force is called delayed resonator (DR), as shown in (a) Dynamic vibration absorber (DVA) and (b) delayed resonator (DR).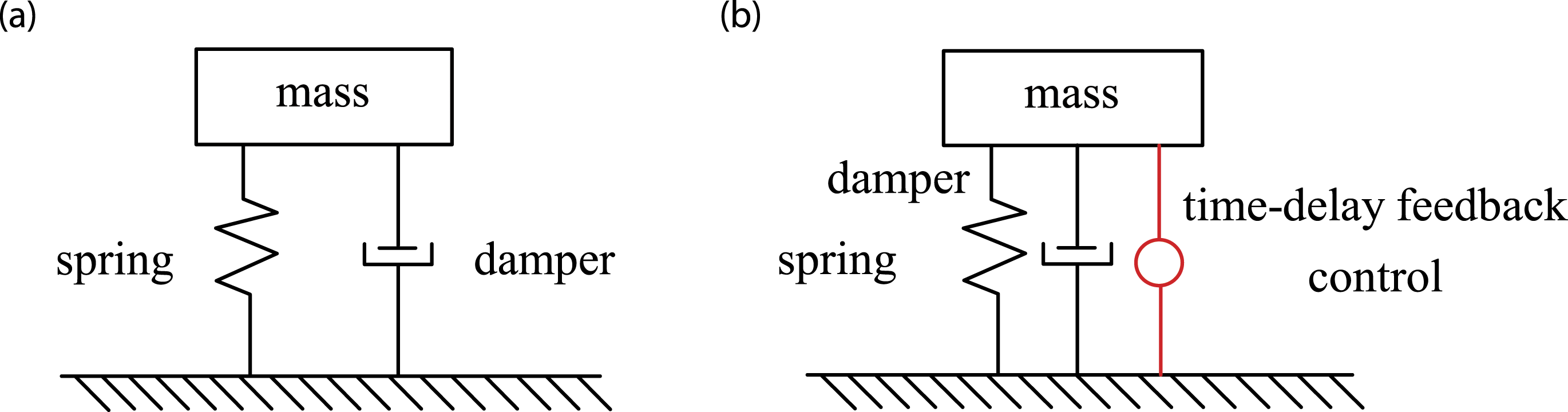
Figure 1(b). It can choose different feedback objects and different feedback types to achieve damping control; however, the performance of it should be further studied. Olgac and Holm-Hansen 11 first proposed the concept of DR, which can completely absorb the vibration of the main system under single-frequency excitation. Then, the Olgac team conducted theoretical research on DR based on displacement feedback, 12 velocity feedback, 13 and acceleration feedback 14 and analyzed the impact of different feedback types on system vibration. Zhao et al. 15 studied the dynamic behavior of a two-degree-of-freedom (DOF) structure with DR using the direct method, focusing on the vibration and stability of the main vibration system of the structure. Zhao and Xu 16 studied the vibration damping performance of the nonlinear DR on the main system using the multi-scale method. The results show that the vibration response of the main system was reduced by 86% compared with the time-delay-free system when the time-delay feedback parameters were adjusted to the optimal value. Li et al. 17 studied the application of time-delay feedback control and LQR control in reducing the vertical vibration of the vehicle, and the results show that the time-delay feedback control has a better vibration reduction effect. Zhang et al. 18 proposed a novel event-triggered fault tolerant auto-steering control strategy for autonomous land vehicles for path tracking under in-vehicle network time-delay. The controller not only guaranteed the path tracking performance but also saved communication resources. Wang and Hu 19 used the method of stability switching to analyze the stability of time-delay systems and solved the time-delay stability interval by judging whether the polynomial equations have positive real roots and the number of real roots. Koumene Taffo et al. 20 chose the nonlinear quarter-vehicle model as the research object and analyzed the parameter resonance problem under time-delay displacement feedback and velocity feedback. At present, great progress has been made in the study of the theory of time-delay vibration reduction, but research on the seat suspension system is still few. In addition, the vehicle is a complex multi-DOF dynamics model, and it is one-sided to study the suspension vibration reduction effect of time-delay control on the quarter-vehicle model. In other words, the half-vehicle model can better reflect the real vibration characteristics of the vehicle.
To solve the above problems, this study applies DR to the seat suspension system of a light truck. Taking a half-vehicle model as the research object, an active seat suspension control method based on DR is proposed. The time-delay control parameters with the smallest time-domain vibration response of the seat under road harmonic excitation and random excitation are obtained by particle swarm optimization. The stability interval of the time-delay system is obtained by the frequency sweeping method and verified numerically. Finally, models of passive seat suspension, seat suspension with DVA, and active seat suspension with DR are established. The performance of DR on seat vibration reduction in the time-domain and frequency-domain is compared and analyzed using the above model.
Mechanical model
To analyze the influence of time-delay feedback control on seat vibration, a DR is assembled on the seat suspension. The vehicle model is simplified to a 6-DOF suspension system dynamic model, which mainly includes the vertical movement and pitch movement of the vehicle body, the vertical movement of the seat, the vertical movement of the DR, and the vertical movement of the front and rear wheels.
In Figure 2, Six-DOF half-vehicle suspension model with delay resonator (DR).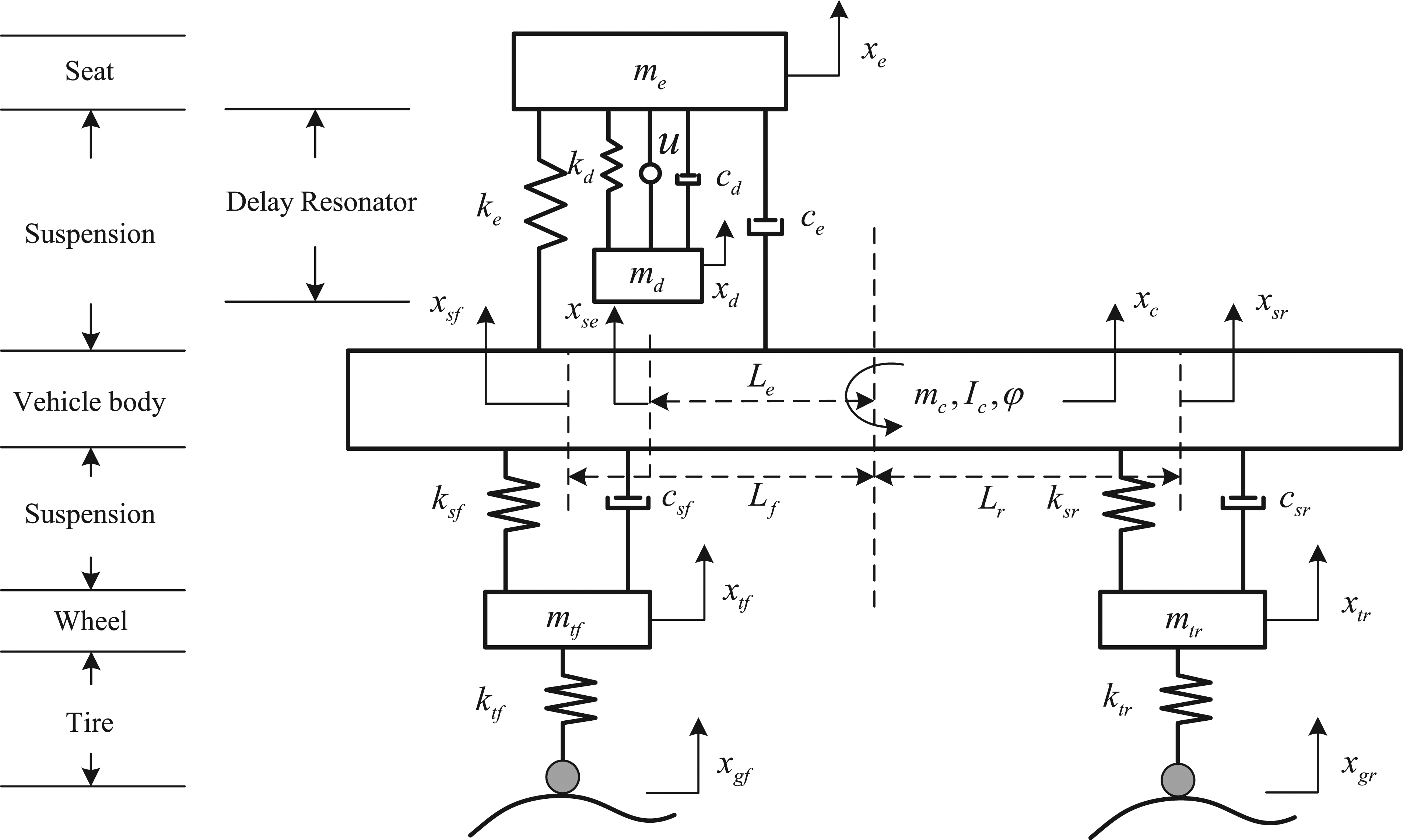
front and rear axle tires, respectively;
Separate each degree of freedom system, and according to Newton’s second law, establish vibration differential equations with time-delay feedback control.
Vertical motion equation of DR

Equation of seat vertical motion

Vertical motion equation of vehicle body

Body pitching motion equation

Vertical motion equation of front and rear axle tires

The system includes a DR based on seat displacement feedback. The time-delay feedback control force is expressed as

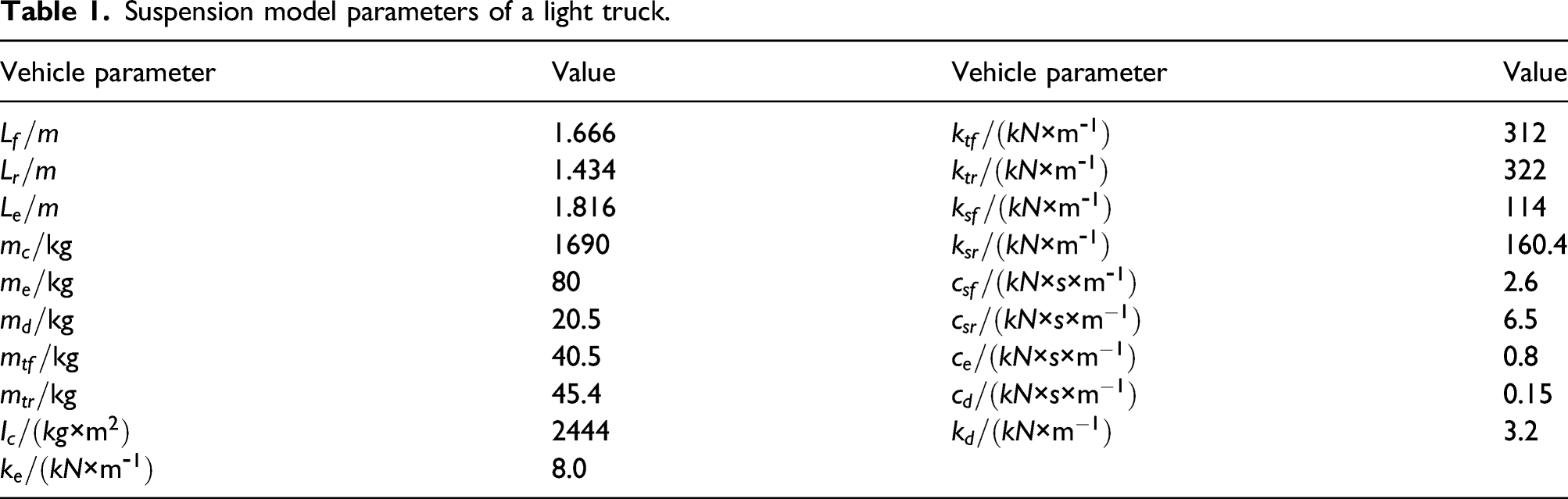
Suspension model parameters of a light truck.
The pitch angle of the vehicle changes within a small range, which can be approximated as
Solution of optimal feedback control parameters
Method of solving the time-delay equation
The state variables
Define the state space equations of the suspension system as follows
According to the precise integration method21,22 of delay differential equations, the numerical solution of the vibration system of the 6-DOF half-vehicle model is solved. Establish a quantitative relationship between time-delay control parameters, road excitation, and time-domain vibration response of the system.
The time-delay control term in equation (8) is regarded as the excitation term and its solution can be written as
It is assumed that the selected step size is
The numerical discretization of equation (9) can be expressed as
Then, equation (10) is solved to obtain the vibration response of the system at each time node as follows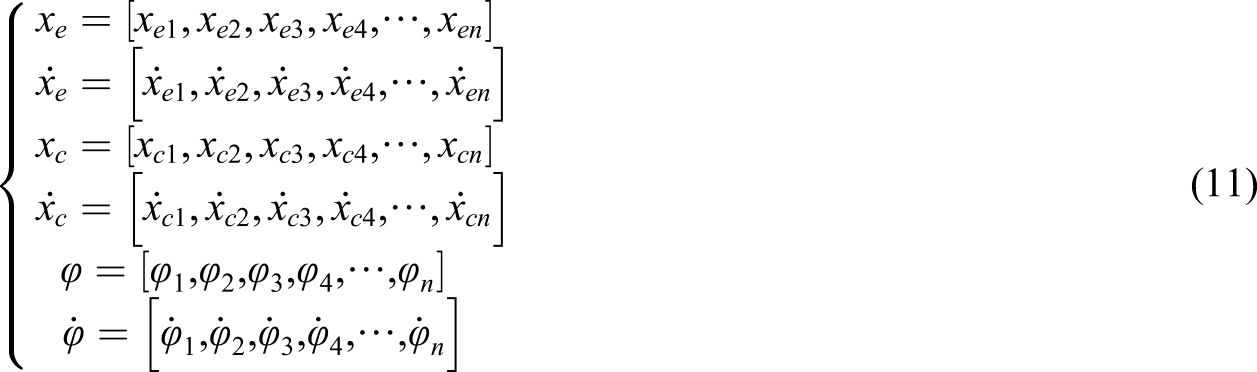
Finally, substituting equation (11) into equations (2-4) so that the seat acceleration, body acceleration, and pitching acceleration of the system at each time node are as follows 
Through this method, different road surface excitation can be directly introduced into the solution and optimization of time-delay control parameters. The time-delay control parameters with the minimum time-domain vibration response of the system under the action of DR can be obtained.
Objective function
The root mean square (RMS) value of seat displacement, RMS value of seat acceleration, and RMS value of vehicle body acceleration are selected as multi-objective optimization functions to reduce the impact of vibration generated by the vehicle on passenger comfort and vehicle ride comfort

Time-delay control parameters optimization algorithm
Particle swarm optimization (PSO) is an intelligent algorithm based on information interaction between individuals and groups.23-25 It mainly uses individual extremum and group extremum to achieve gradual optimization. The algorithm can approach the optimal solution very quickly and can effectively optimize the control parameters with a certain time-delay, so that the objective function tends to be minimized. The algorithm steps are as follows: Two two-dimensional search spaces representing time-delay and feedback gain coefficients are set; 2. According to equation (11), the numerical solutions of the vibration displacement response and velocity response of the seat and vehicle body under the action of each pair of control parameters are solved. Then, the vibration acceleration response of seat and vehicle body is calculated through equation (12). Finally, the numerical solution of the objective function under each pair of control parameters is obtained by equation (13) and stored in an array 3. In each array, the time-delay feedback parameters corresponding to the minimum objective function are selected as the individual optimal value 4. After obtaining a set of optimal values, it is necessary to update the particle velocity and position. The update rules are defined as 5. The global optimum is continuously updated to find the control parameters corresponding to the global optimum at the end of the calculation, in other words, the optimal time-delay control parameters.



In the algorithm, 40 particles are randomly selected for 100 iterations of optimization, and the change of fitness values under simple harmonic excitation and random excitation is obtained, respectively. From Figure 3 (a) and (b), it can be seen that the fitness values both decrease with the increase of the number of iterations until stability. This indicates that the vibration response of the seat is continuously reduced to a minimum. After optimization, the optimal control parameters for simple harmonic excitation and random excitation are (a) Variation of fitness value under simple harmonic excitation and (b) variation of fitness value under random excitation.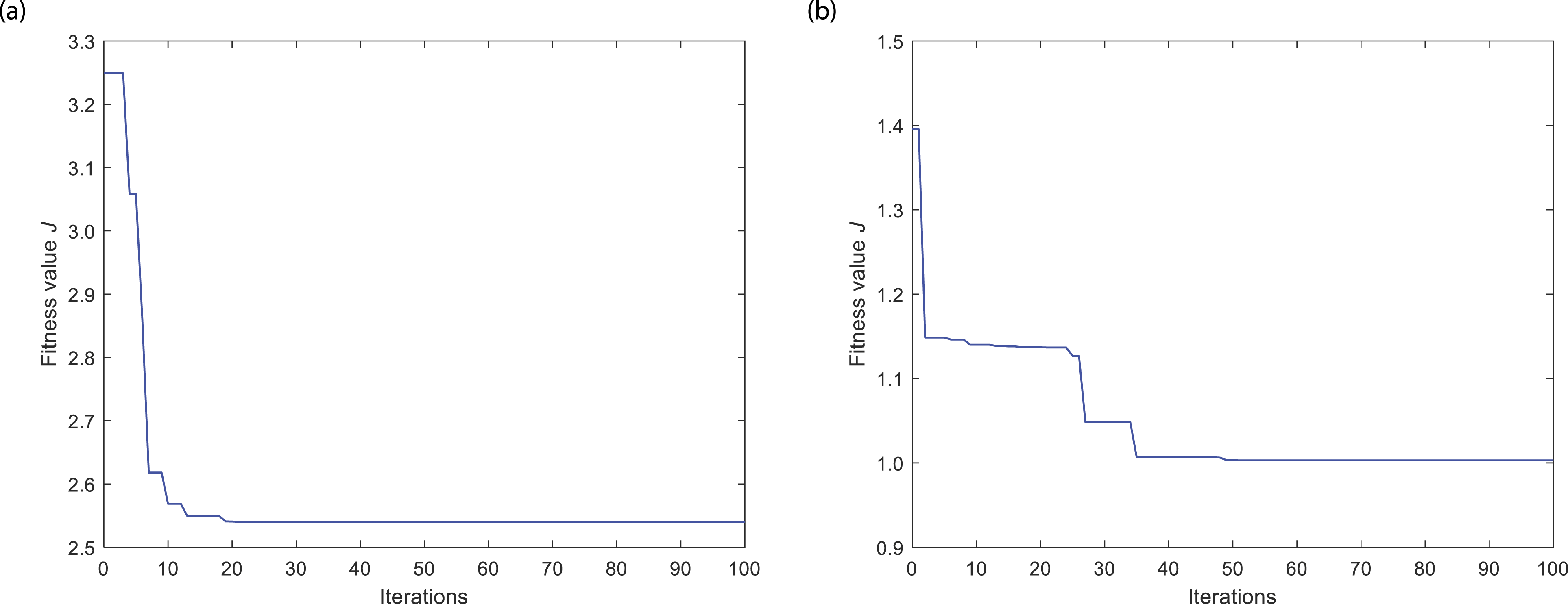
Stability analysis
When the time-delay feedback control is introduced into the system, the system can remain stable only when appropriate feedback parameters are selected. Therefore, the frequency sweeping method is chosen for the stability analysis, which can simplify the system analysis and effectively detect the imaginary root of the system. 26
The Laplace transform is applied to equations (1–5) to solve the system characteristic equation
Equation (18) can be further expressed as

For 
Since both
Scan
If there is a point
Substitute
Finally, the time-delay value is calculated
If two imaginary roots belong to the same quasi-polynomial, then the larger one moves to the right in the complex plane until it crosses the imaginary axis. The smaller one moves to the left until it crosses the imaginary axis.
According to the above theory, the feedback control parameter (a) Norm of 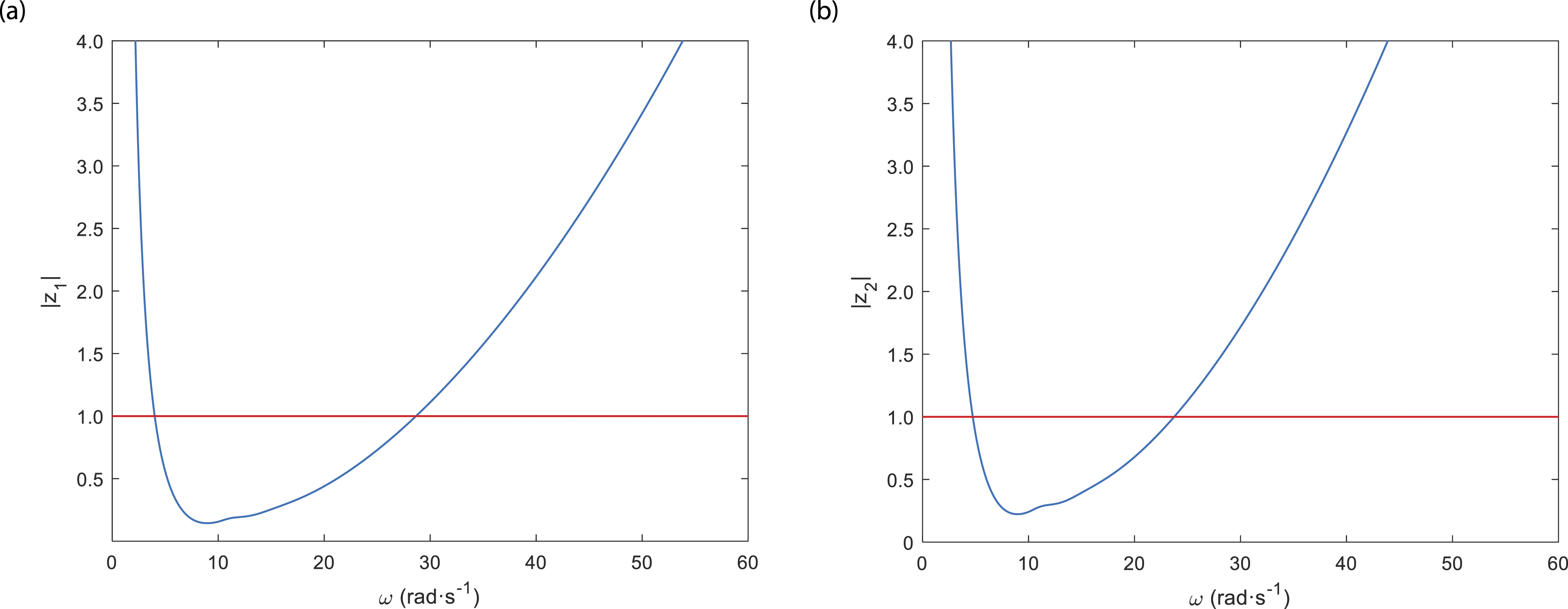
The imaginary root
When
Similarly, the optimal feedback control parameter
To verify the above conclusions, time-delay Numerical simulation results.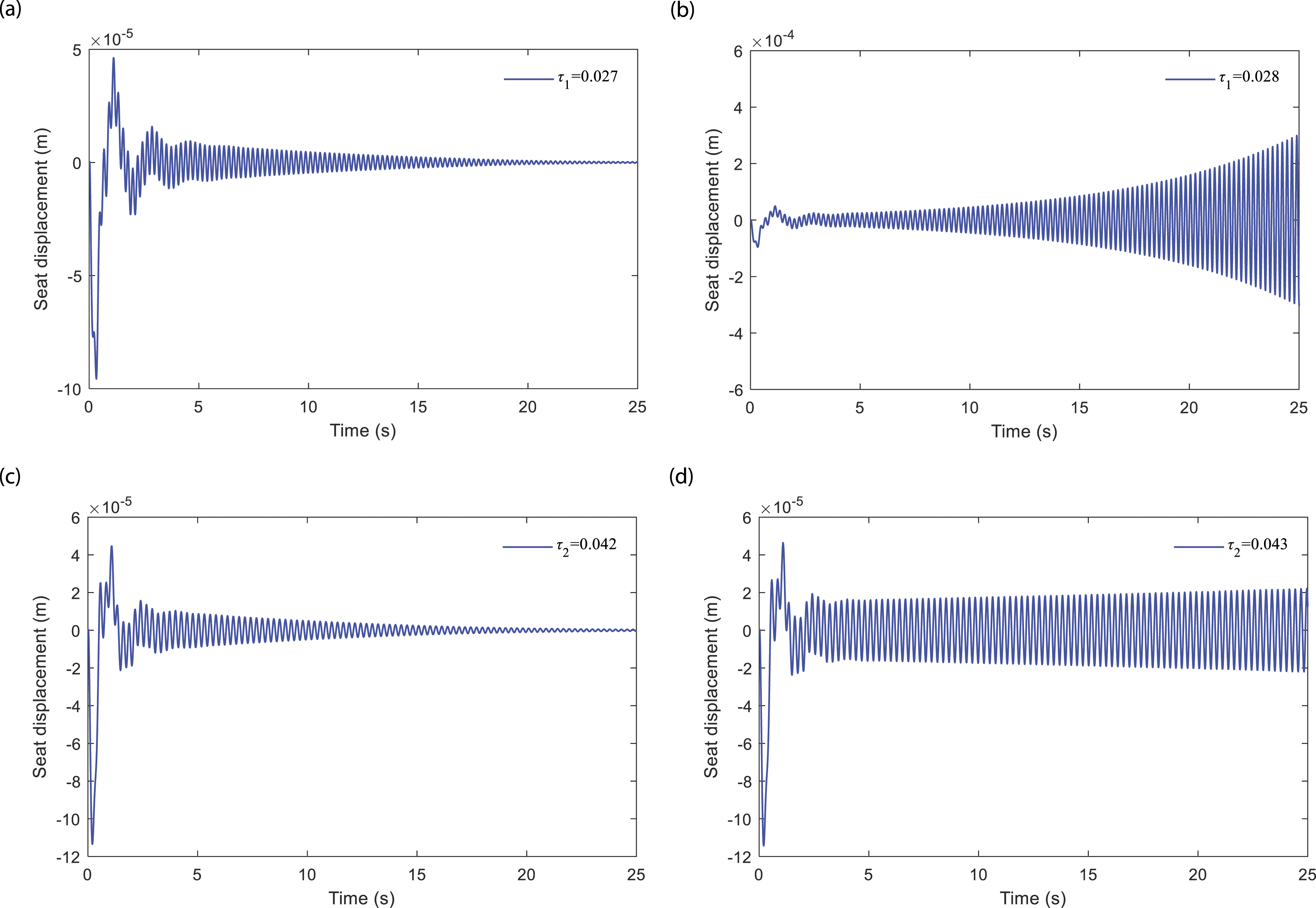
Simulation and result analysis
To verify the damping effect of DR in the seat suspension system, the amplitude–frequency characteristics and time-domain responses of the seat under different excitations are analyzed by comparing the passive seat suspension and the seat suspension with DVA.
Frequency-domain analysis
Bring the optimal time-delay feedback control parameters (a) Seat amplitude–frequency characteristic curve and (b) seat amplitude–frequency characteristic curve under different passenger weights.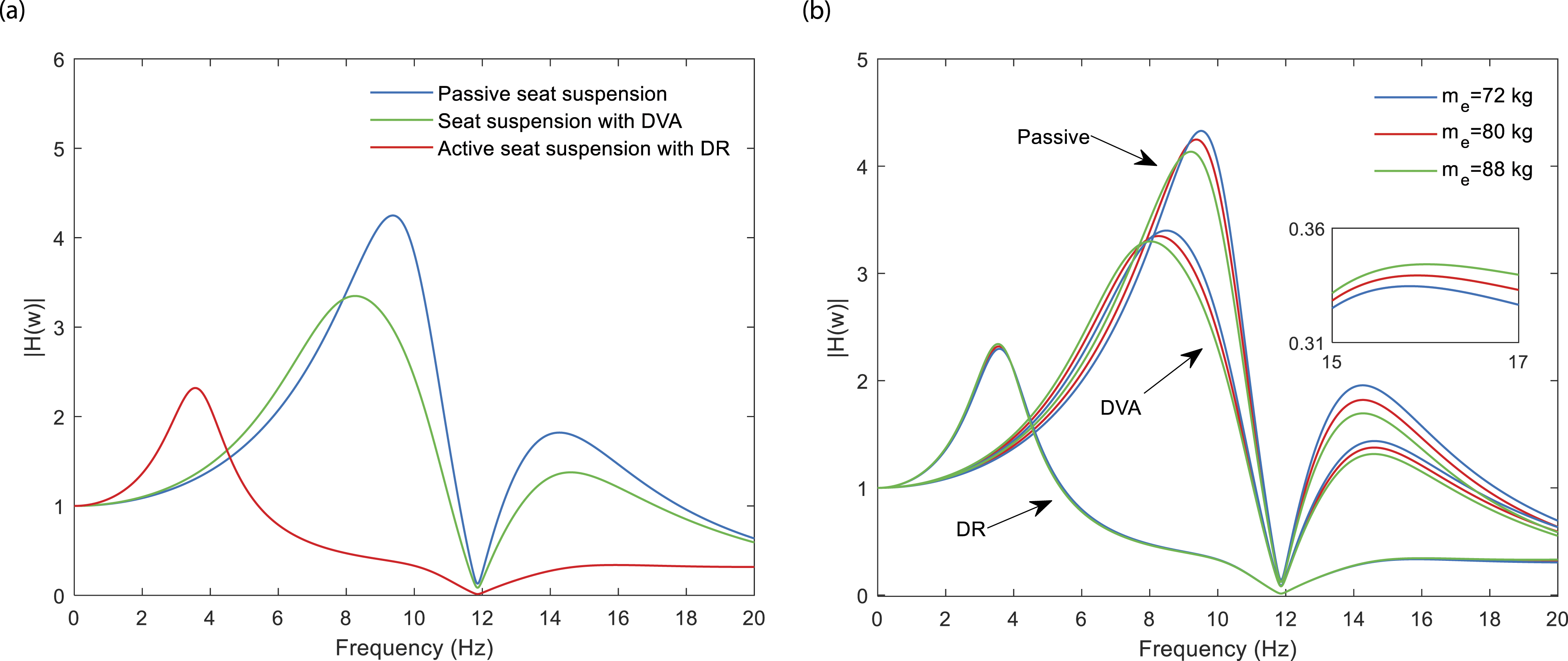
It can be seen from the figure that the natural frequency of passive seat suspension is around 9 Hz. Both the seat suspension with DVA and the active seat suspension with DR can effectively reduce the seat vibration displacement in this frequency range, and the control effect with DR is better. On the other hand, compared with passive seat suspension, the
DVA has achieved a good damping effect on seat vibration response within 8∼20 Hz, while the DR has achieved a better damping effect than DVA within 4.5∼20 Hz. The results show that DR can reduce the vibration characteristics of the seat suspension more effectively and has a wider damping frequency band.
RMS value of seat amplitude–frequency characteristic after changing parameters.

RMS: root mean square; DVA: dynamic vibration absorber; DR: delayed resonator.
Time-domain analysis under simple harmonic excitation
The optimized time-delay feedback parameters Simulation comparison under simple harmonic excitation.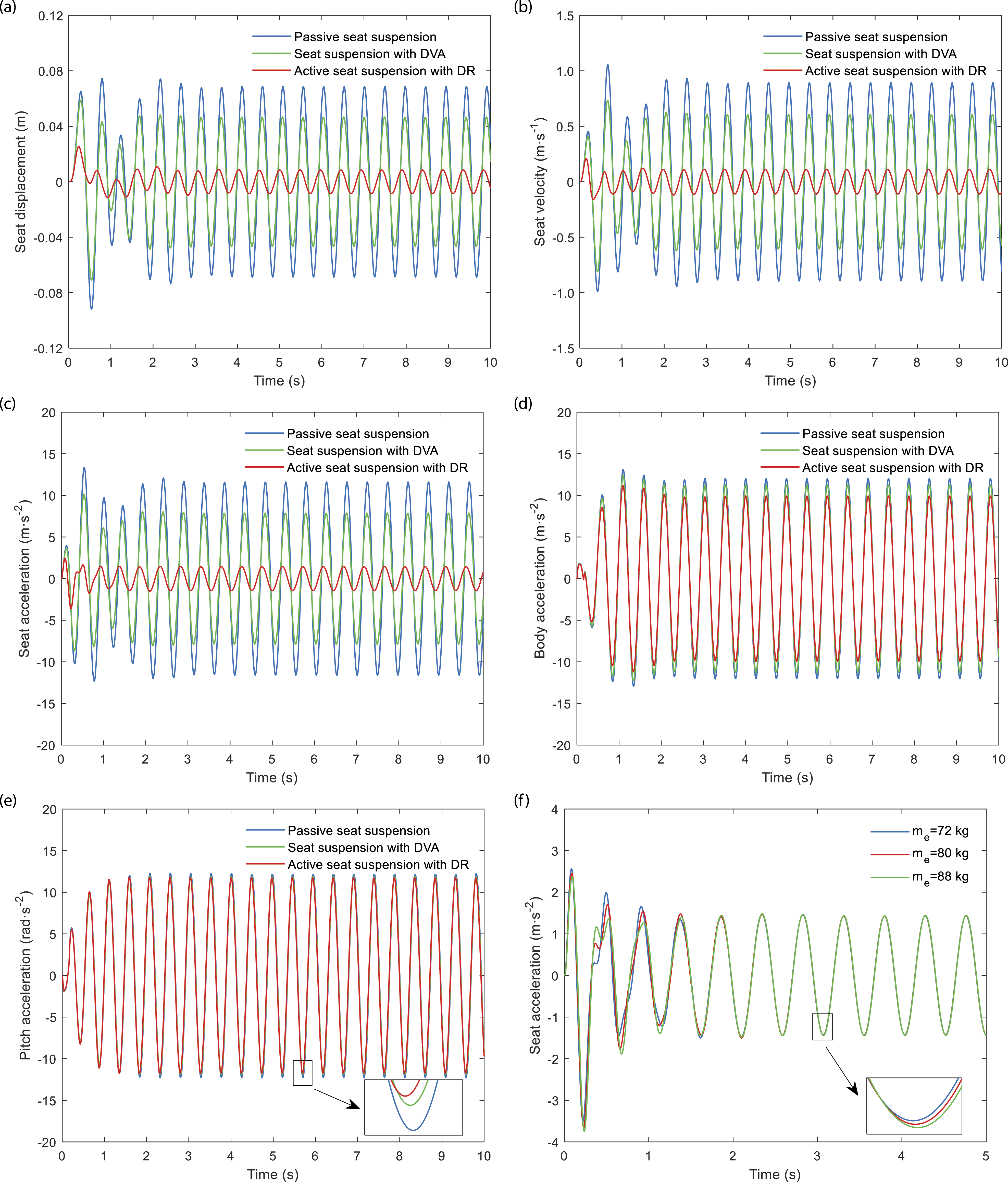
RMS value of performance index under DVA control.
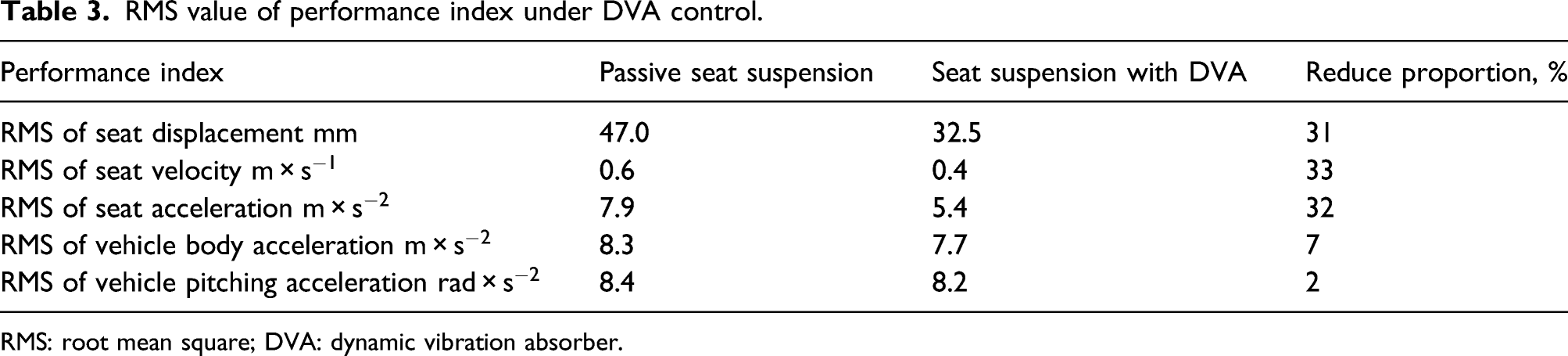
RMS: root mean square; DVA: dynamic vibration absorber.
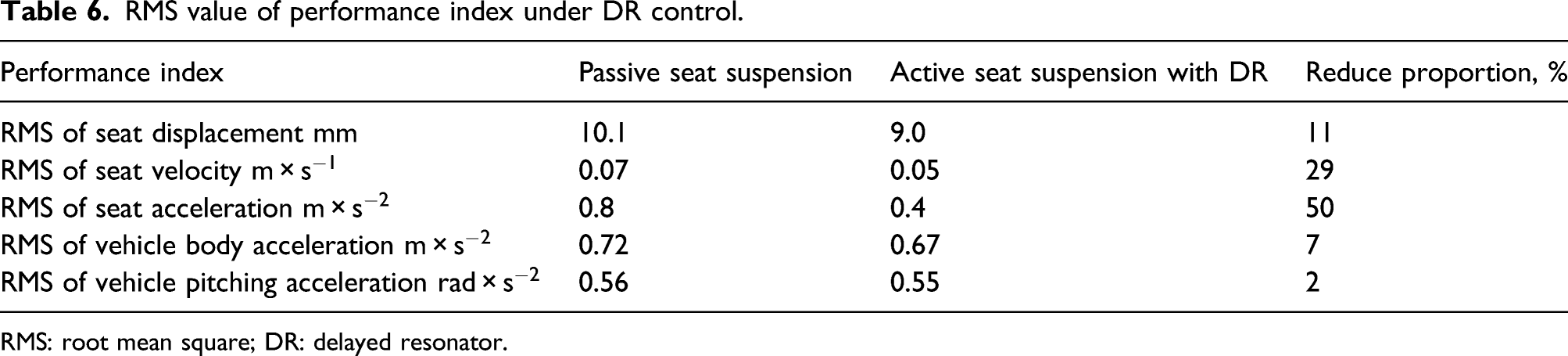
RMS value of performance index under DR control.
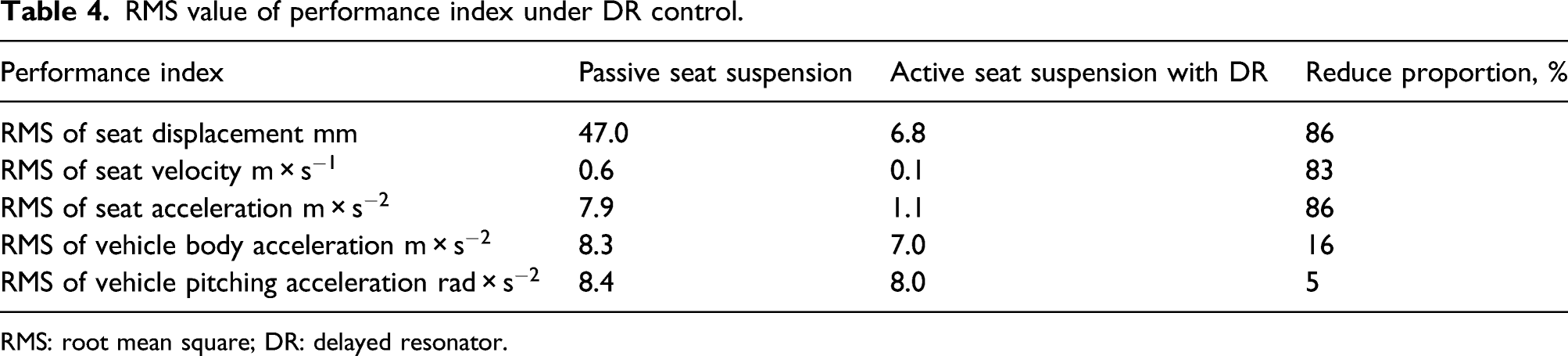
RMS: root mean square; DR: delayed resonator.
Through the above analysis, it can be seen that the DR can greatly suppress the vibration response of the seat and has little effect on other performances of the vehicle suspension. It can ensure that the vibration damping performance of the seat is improved without affecting the vibration of the vehicle body. At the same time, the DR absorbs the external vibration of the seat suspension system more effectively than DVA and has better damping control effect.
Time-domain analysis under random excitation
In this section, the simple harmonic excitation of the front wheel vibration input is changed into random excitation to explore the vibration reduction control effect of DR on the seat suspension under random excitation.
As the input of tire vibration, road roughness is usually described by road power spectral density.27,28 The expression of road power spectral density (PSD) is
The road surface PSD in spatial frequency is converted to road surface PSD in temporal frequency and substituted into equation (23) and set 
Taking B-class road roughness as an example, the vibration damping effect of DR on the seat is studied. Take (a) B-class random road roughness and (b) comparison of PSD curve of road surface displacement.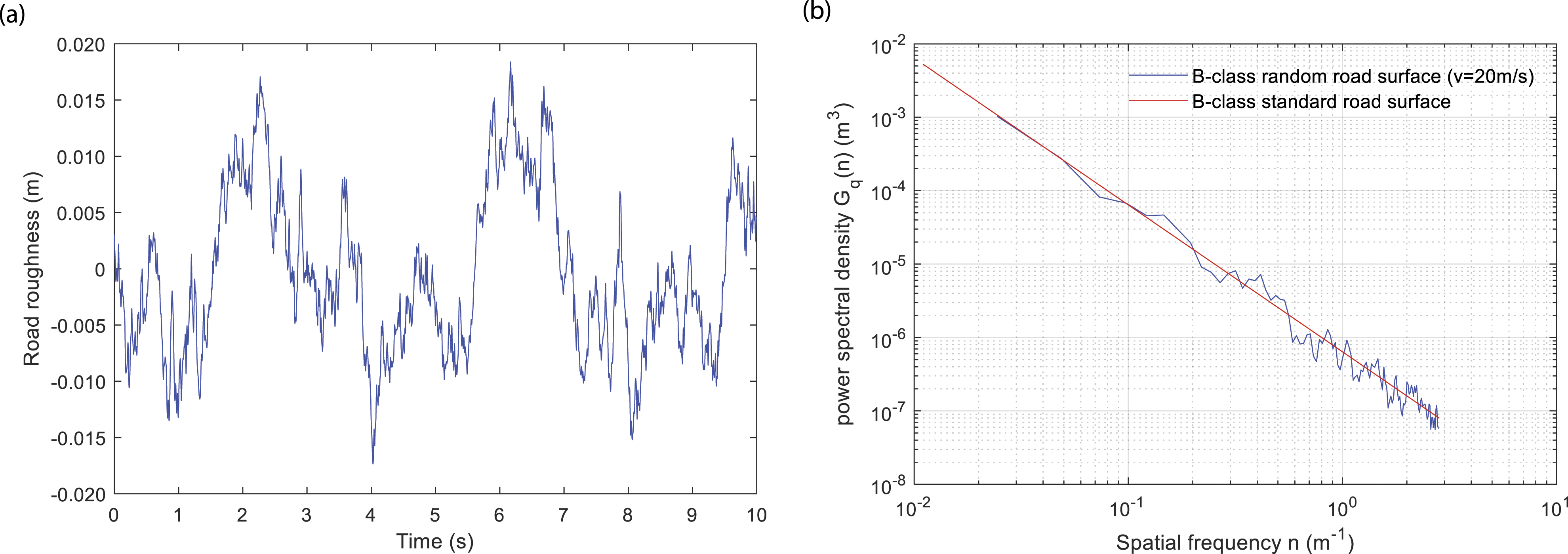
Figure 8(b) shows that the PSD of the generated random road surface is consistent with that specified for the standard grade road surface, indicating that the generated signal is reasonable and can be used as an input excitation for ride comfort analysis and research. Similarly, optimized time-delay control parameters Simulation comparison under random excitation.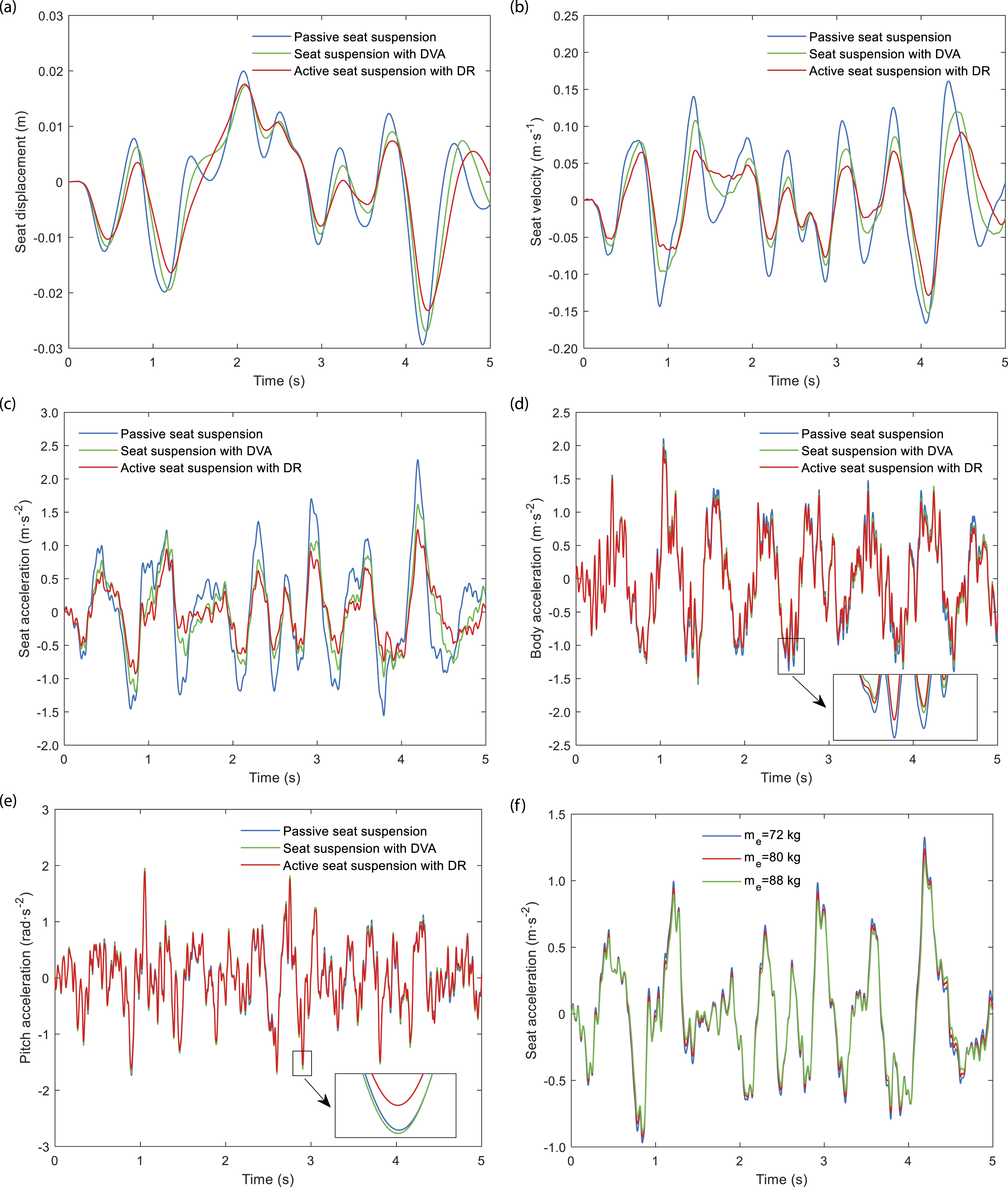
It can be seen from the time-domain diagram of seat and body vibration response that the DR reduces the vibration velocity and acceleration of the seat significantly. At the same time, the seat displacement, body acceleration, and pitch acceleration also decreased in different degrees.
RMS value of performance index under DVA control.
RMS: root mean square; DVA: dynamic vibration absorber.
RMS value of performance index under DR control.
RMS: root mean square; DR: delayed resonator.
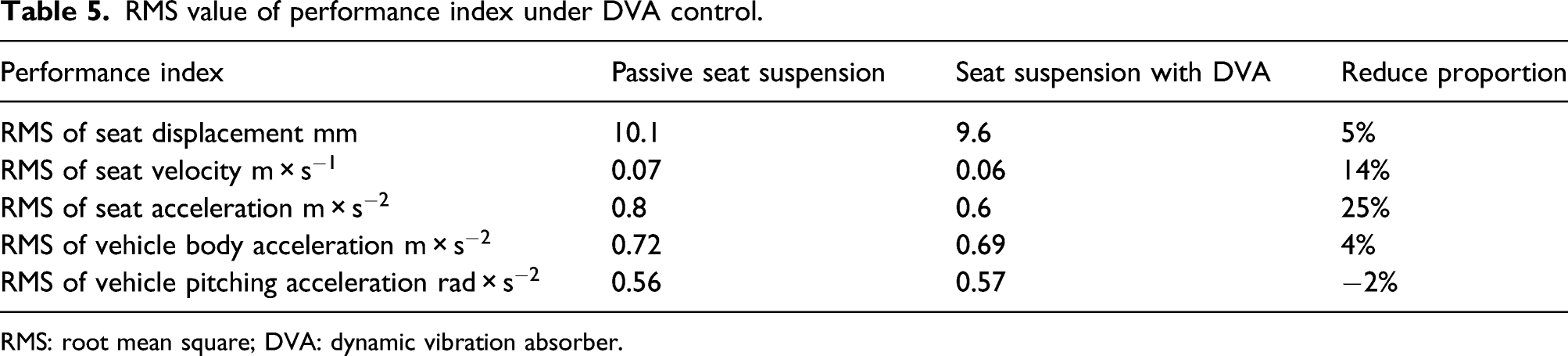
From the above analysis, it can be seen that under the random excitation of the road surface, the DR also achieves a better vibration reduction control effect than the DVA, which is particularly obvious in the control of seat vibration velocity and seat vibration acceleration. The use of DR to improve the seat suspension system not only has a small impact on the driving performance of the vehicle but also improves the body vibration to a certain extent.
Conclusion
In this study, the DR is applied to the seat vibration control of a half-vehicle model. The stability of the time-delay system is studied by combining theory with numerical methods, and the time-delay control parameters are optimized. Finally, the simulation analysis of the model under different excitation is carried out. The main conclusions are as follows: (1) the precise integration method is used to solve the time-delay differential equation, and the RMS of seat vibration response in the time-domain is taken as the main optimization objective, so that the time-delay control parameters with maximum damping effect can be directly obtained. Moreover, the corresponding optimal vibration reduction effect can be obtained through different time-delay control parameters obtained by different external excitations. (2) Compared with DVA, the DR has a wider damping frequency band and better damping performance under the premise of the stable time-delay system. In addition, if the selection of time-delay control parameters is unreasonable, then the vibration control effect of the DR becomes worse, which is to be avoided. (3) Through simulation analysis, the DR can achieve a better vibration reduction control effect than the DVA for both simple harmonic excitation and random excitation. It can significantly improve the vibration reduction performance of the seat suspension system, and the vibration response of the vehicle body is effectively attenuated, thus improving passenger comfort and vehicle ride comfort. Meanwhile, the DR has good robustness under the condition of 10% increase or decrease of passenger weight, which provides a new research direction for the design of vehicle seat suspension system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (Grant No. 51275280).
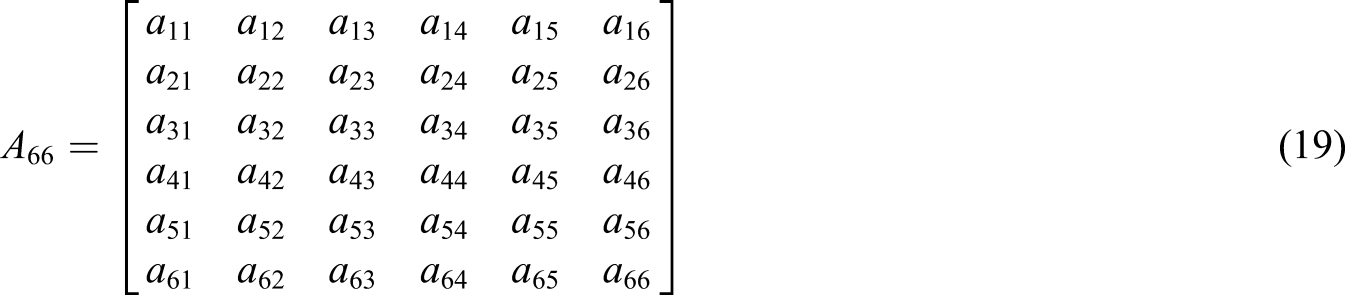
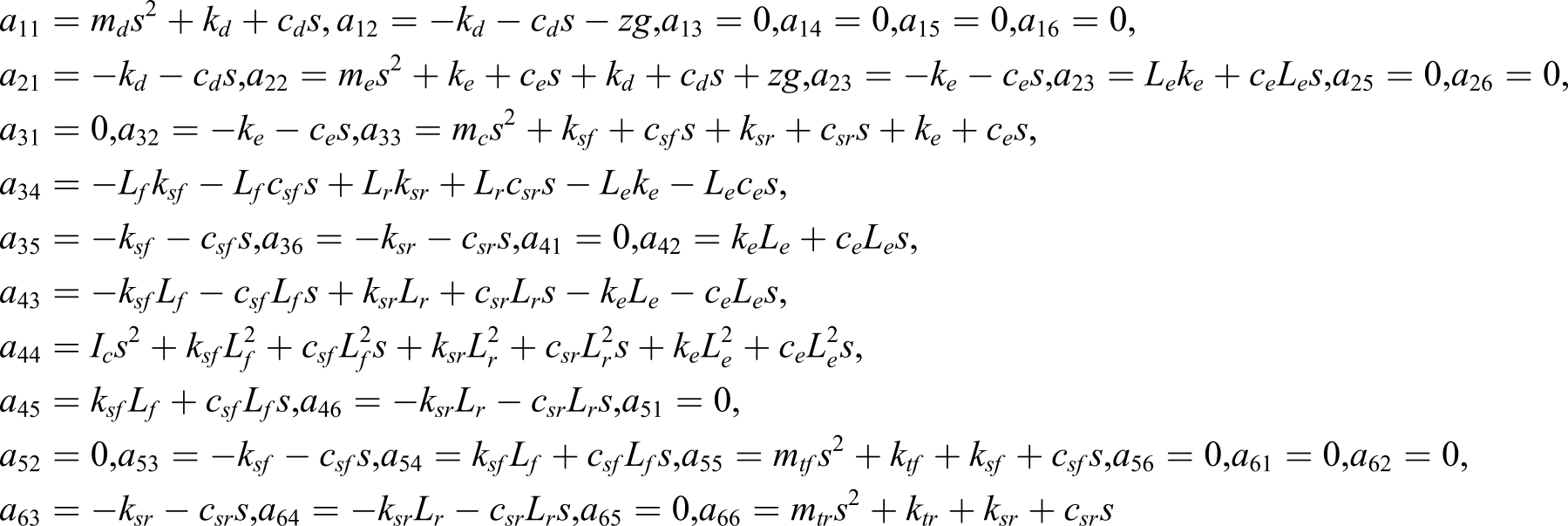
Appendix
Equation of state each control matrix