
Abstract
Control algorithms are the most critical aspects in the successful control of civil structures subjected to earthquake and wind forces. In recent years, adaptive intelligent control algorithms are emerging as an acceptable substitute method to conventional model-based control algorithms. These algorithms mainly work on the principles of artificial intelligence (AI) and soft computing (SC) methods that make them highly efficient in controlling highly nonlinear, time-varying, and time-delayed complex civil structures. The current research probes to control algorithms, that this article set forth an inclusive state-of-the-art review of adaptive intelligent control (AIC) algorithms for vibration control of smart civil structures. First, a general introduction to adaptive intelligent control is presented along with its advantages over conventional control algorithms. Second, their classification concerning artificial intelligence and soft computing methods is provided that mainly consists of artificial neural network-based controller, brain emotional learning-based intelligent controller, replicator dynamics-based controller, multi-agent system-based controller, support vector machine-based controller, fuzzy logic control, adaptive neuro-fuzzy inference system-based controller, adaptive filters-base controller, and meta-heuristic algorithms-based hybrid controllers. Third, a brief review of these algorithms with their developments on the theory and applications is provided. Fourth, we demonstrate a summarized overview of the cited literature with a brief trend analysis is presented. Finally, this study presents an overview of these innovative AIC methods that can demonstrate future directions. The contribution of this article is the anticipation of detailed and in-depth discussion into the perspective of AI and SC-based AIC method advances that enabled practical applications in attenuating vibration response of smart civil structures. Moreover, the review demonstrates the computing advantages of AIC over conventional controllers that are important in creating the next generation of smart civil structures.
Keywords
Introduction
Previously civil structures were designed by conventional codes along with Passive Vibration Control (PVC) system, that is unable to adjust structural characteristics (i.e., mass, stiffness, or damping) dynamically under the environmental loads (i.e., earthquakes and strong winds).1–7 However, with the developing trend of high-rise buildings and long-span bridges, the need for smart structures ascends that can adapt towards their changing environment and keep up their serviceability progressively. Through the escalation of Active Vibration Control (AVC) and Semi-active Vibration Control (SVC) systems since 1980, 8,9 the concept of smart structures is acknowledged 10 as an intelligent machine that can change and adapt to its environment dynamically working on a few components: sensors, actuators, signal processors, and power sources.11,12
Prior academic research indicates that the VCS for smart structures has two main groups: First group deals with the development of physical control devices actualizing existing control strategies. However, the second group deals with developing new or improving existing control algorithms for existing control devices. 20 This study addresses the second part considering that effective use of these control systems requires an exact and suitable control algorithm for computing actuators control forces.21,22 To the best of the author’s knowledge, the prime foundation of VCS is the control algorithm. 23 Additionally, these control algorithms help in the advancement of control schemes that are cost-effective, predictable, adaptive, and robust, prompting increasingly reliable, safer, lighter, and more vigorous structures.24–26 For the development of control algorithms and simulating structural behavior, the numerical model of the system is developed.14,27 For their work, some control algorithms utilize numerical models of the system referred to as Model-Based Control (MBC)/parametric control schemes, and some do not name as non-model-based/non-parametric control schemes.21,28
Model-Based Control schemes should initially acquire a precise mathematical model for an existing system and design the controller afterward. The performance of these schemes is strongly dependent on wellknown structural parameters, which is also known as parametric control. 14 These MBC schemes have established linear and nonlinear control algorithms. The Linear MBC Algorithms includes Proportional-Integral-Derivative (PID), optimal (i.e., LQR and LQG) and robust (i.e., H2 and H∞) controllers.28,29These linear fixed controllers lack adaptivity towards parametric uncertainties, unmodeled dynamics uncertainties and external disturbances make them completely ineffective in controlling nonlinear civil structures.30,31 To overcome adaptivity issues, nonlinear adaptive control is recommended for controlling civil structures.16,32-34 These controllers have shown high adaptivity under highly uncertain and unknown conditions by automatically adjusting their parameters in real-time.14,35 These classic adaptive MBC algorithms incorporate Backstepping Control, Sliding Mode Control (SMC), LQR-based adaptive control, Model Reference Adaptive Control , model predictive adaptive control, adaptive pole placement, time delay control, etc.21,28 Some of these controllers have demonstrated the required performance in the control of nonlinear systems. Regardless, their effectiveness has decreased significantly in the control of nonlinear systems with uncertainties, and, in most of the scenarios, they were the key root cause for instability of the closed-loop system.36,37 Likewise, these controllers have fixed adjusting parameters, making them unalterable, innately less safe, and less robust controllers with uncertain stability and convergence brought about by unmodeled dynamics.38,39 As civil structures are highly complicated multi-degree-of-freedom systems, it is dreadfully challenging to find a precise numerical model representing their actual behavior.40,41 Additionally, these linear and nonlinear MBC schemes often require high computational exertion toward identifying and modeling systems instead of designing controllers.27,42 Accordingly, to mitigate the mentioned shortcomings and make control schemes less reliant on the numerical system’s model, the researchers integrate adaptive control with intelligent systems (control). 43
The above-discussed integration is performed in two ways. The first one by combining a model-based adaptive control with intelligent (i.e., purely data-driven) systems is incorporated in direct or indirect learning schemes:44,45 directly by learning the uncertain part by acting as controller block and indirectly by tuning the parameters of the MBC controller referred as a dual or modular design for adaptive control.45,46 Second one by incorporating intelligent systems to obtain the knowledge of the system dynamics using the input–output data set through direct interaction with the system without using a parametric plant model during the controller design process,38,44,47 represented as non-model based/non-parametric control.21,28,48 These intelligent systems generally belong to Artificial Intelligence (AI) and Soft Computing (SC) techniques, such as Artificial Neural Networks (ANNs), Fuzzy Logic (FL), Support Vector Machine (SVM), Adaptive Neuro-Fuzzy Inference System (ANFIS) etc.38,44 This combination of adaptive with intelligent systems, one may view “Adaptive Intelligent Control (AIC),”49-52 in some literatures also named as “intelligent adaptive control” 49 or intelligent and adaptive control. 43 These control methods have been more considered in recent years because of their special capabilities like handling nonlinear complex systems, high adaptivity, and robustness to errors and uncertainties with extra effectiveness in controlling civil structures than MBC control methods. 21
Recently, several studies have been published in the perspective of structural vibration control, typically concentrating on particular characteristics of the common topic. Soto and Adeli 29 discussed the overall advancement in control algorithms from classic towards adaptive/intelligent control for smart civil structures and machines with a brief overview on adaptive/intelligent control strategy. Amezquita-Sanchez et al. 12 focused on the common vibration control strategies applied to civil structures. Venanzi 28 offered a study on adaptive control of civil structures starting by classifying them into model-based and non-model–based methods and constrained systems, with a brief introduction of non-model–based AIC strategy. According to our best knowledge previously, several surveys are available on vibration control strategies utilized for civil structures. However, unfortunately, they mainly focused on traditional (MBC) techniques, and none of them provided comprehensive details on recent AIC methods, such as ANNs, ANFIS, and RD . So far, these intelligent methods have undergone noteworthy advancements and escalated use in structural vibration control during the last few years.
Acronyms.
Adaptive intelligent control
Adaptive Intelligent Control (AIC) can be characterized as a control strategy where the control parameters are attuned automatically through the feedback in the direction of the measured response to accomplish close to ideal performance as indicated by some specific criteria. This feedback guarantees that the system knows about the present situation and takes the necessary precautions to eliminate any imbalances that may emerge.
43
These control schemes are a true amalgamation of adaptive and intelligent control systems, as depicted in Figure 1. Adaptive intelligent control.
Adaptive Intelligent Control is recognized in the generic framework through two hierarchical steps.
Selecting a hierarchically organized system (related to the system’s environment) and formulating the hierarchical evaluation functions (identifying its control states) and
Learning an arrangement of the utmost suitable hierarchical values of control parameters (evaluation function is assigned with the minimum values). In other words, step 1 sets up “intelligent self controllable (thinking) algorithms” mimicking human intelligence for different actions (concepts) and step 2 considers these “intelligent self-controllable (thinking) algorithms” in learning the utmost suitable state of the system.
53
These “intelligently self-controllable (thinking) algorithms” are generally dependent on specific principles from AI and other SC techniques, specifically ANNs, Fuzzy logic, GA, etc. The goal of AI is to develop machines that can think and learn by mimicking human cognitive functions. The subsequent “intelligent controller” is just a heuristically developed nonlinear, possibly adaptive system that is consequently manageable to control complex dynamic systems.48,49,54 The notion of intelligent control was first anticipated by Fu (1971)
55
followed by Gupta and Saridis in 1977. An intelligent controller can be understood as an adaptive or self-organizing system that learns by interacting with the environment using nominal prior information,
14
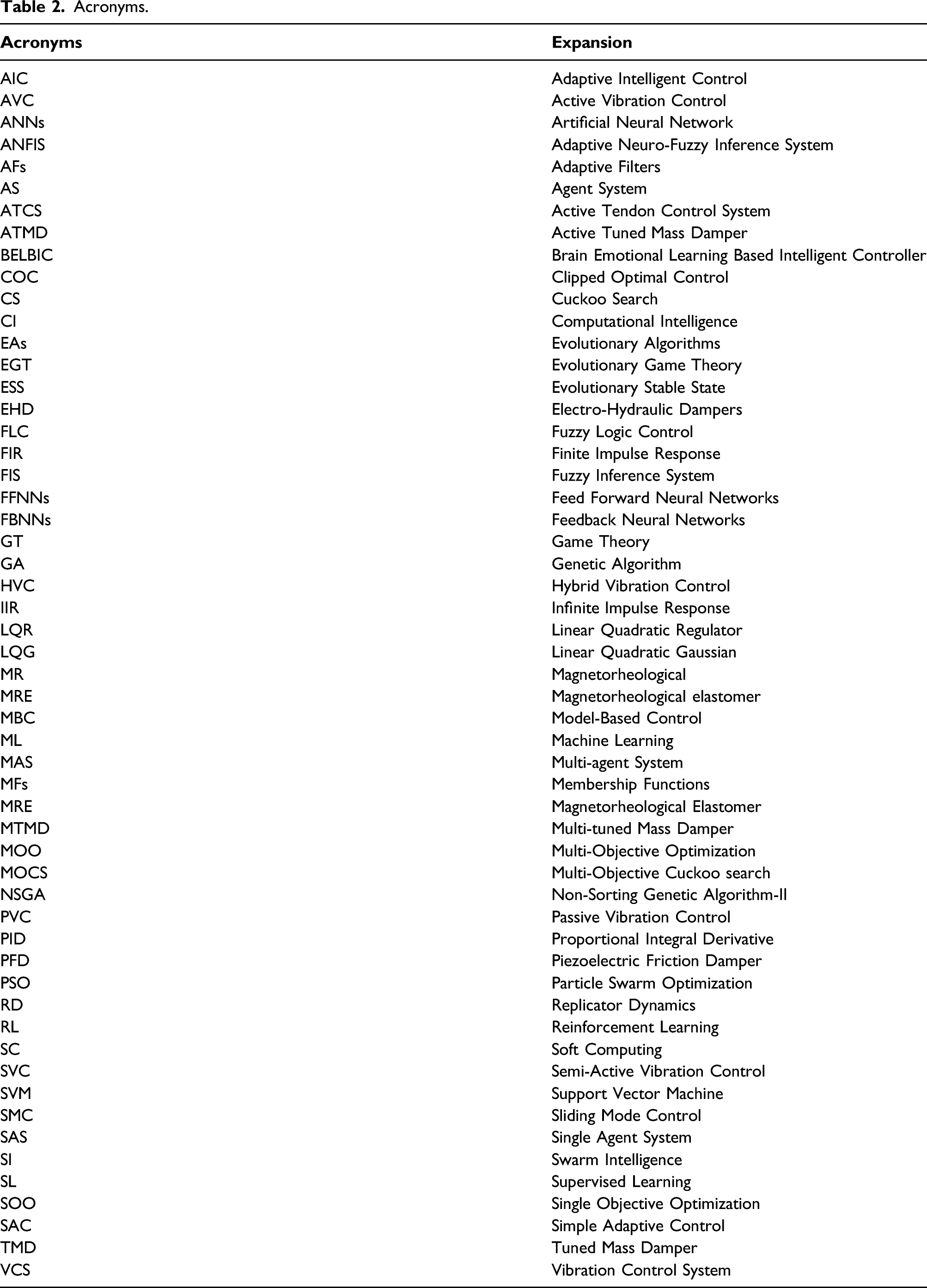
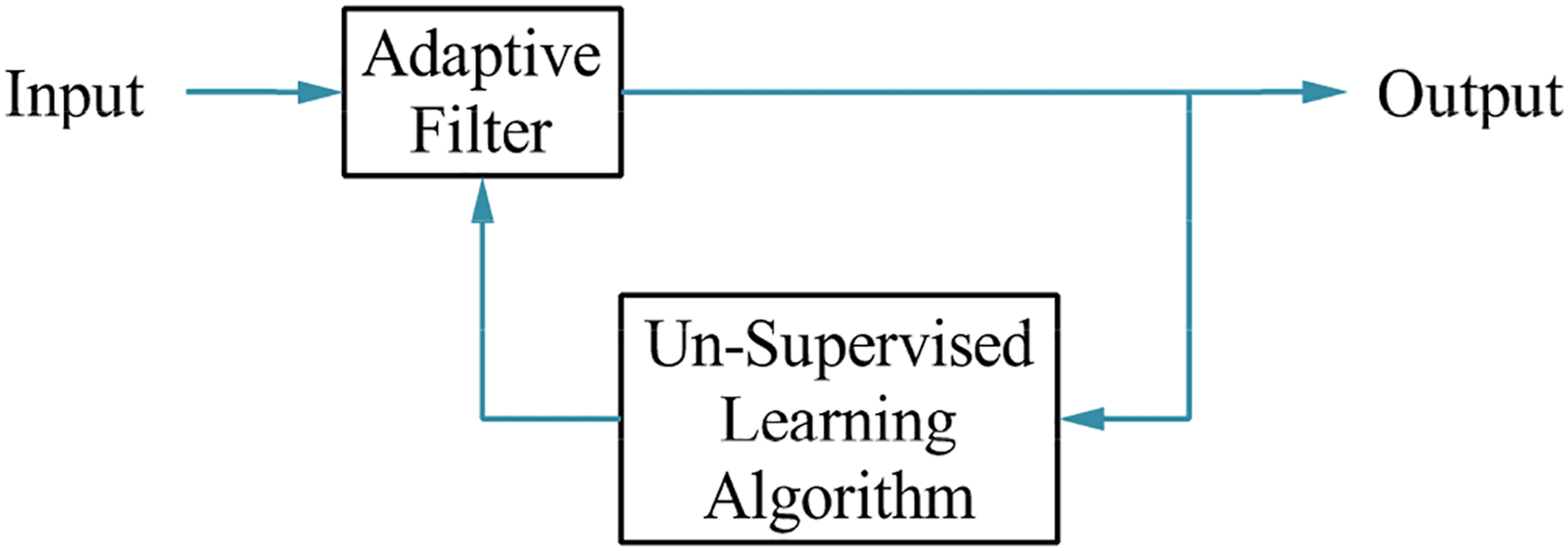
and can accomplish control objectives and can optimize the performance over complex, noisy, nonlinear situations on account of their inherent nonlinearity, adaptivity, and robustness.21,50 The expression “adaptive” indicates those controllers having real-time adaptable/adjustable parameters of plant model/controller. The sensors are employing to collect plant observations (i.e., changes among the system’s output y and its reference output yr), from counteracting for parameter changes, other disturbances, and unknown factors of the plant25,56 (see Figure 2). Combination of adaptive and intelligent control schemes is accepted in the literature as AIC.50-52 These control strategies have some significant advantages over other fixed linear or nonlinear MBC systems reported in the literature which are presented below.
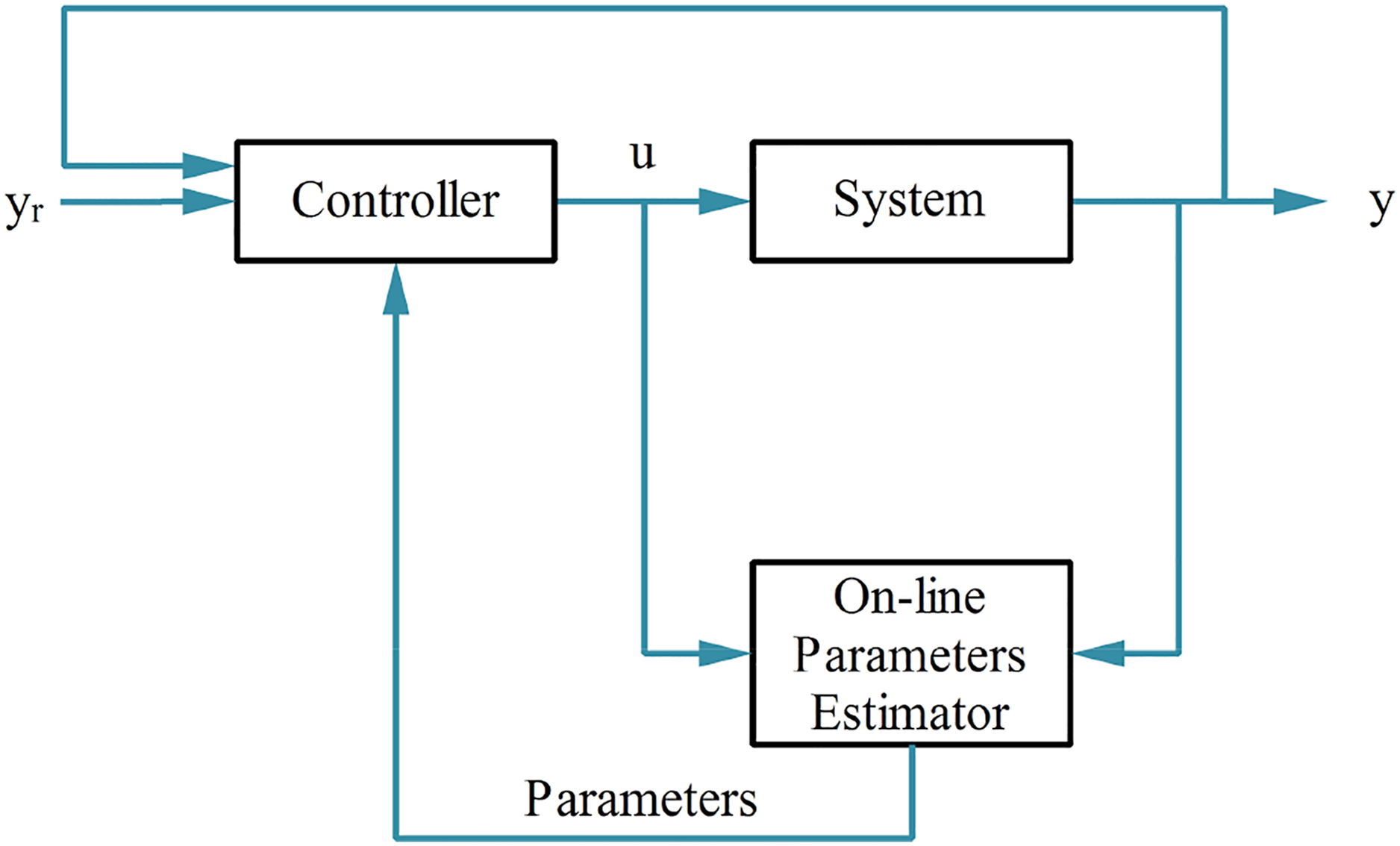
Typical feedback adaptive control System.
Advantages of AIC methods
Adaptive Intelligent Control methods can be trained to imitate a human psyche without thorough numerical equations utilized in conventional controllers.
2
These methods can adequately manage unmodeled dynamics and nonlinearities by including reasoning and inference systems to learn from incomplete, ambiguous, and subjective data based on experience and knowledge.
57
These methods sustain high capabilities of adaptability, robustness, modeling unmodeled dynamics, fault tolerance, solving complex systems, generalized capability, automaticity, training capabilities, learning and prediction under higher levels of system’s uncertainties, unpredicted or unaware conditions, and can effectively deal with large scale data.21,43,50,58-60 These techniques can easily handle the non-linear, highly hysteretic behavior of control devices, where the MBC algorithms fail.
2
These methods adequately able to minimize high amplitudes and accelerations of structures cause by external excitations that in the long run increase structure’s load-carrying capacity, decrease fatigue, and reduction in energy consumption.12,50,61
Classification of AIC methods
The AIC methods can be classified into Machine Learning (ML), Evolutionary Game theory (EGT), Reasoning system, and Adaptive Filters (AFs) based control, methods as displayed in Figure 3. The control algorithms of each classification are briefly discussed below, and detailed explanations and applications for the vibration control of smart civil structures are given in the next section. The ML is a sub-branch of AI that permits the computers to learn from the data itself to get trained based on experience and make predictions.62,63 It can be classified into three types that are supervised, unsupervised, and reinforced learning. Supervised Learning (SL): The data is labeled with the right qualities/names (provided by the explicit teacher), empowering the algorithm to learns by minimalizing the error between its required and actual output. Artificial Neural Networks (ANNs) controllers and Support Vector Machines (SVMs) controllers utilize SL.
64
Unsupervised Learning: Unlike SL, it does not contain any explicit teacher. The task of the algorithm is to look for patterns or meanings in unlabeled data.
63
Reinforcement Learning (RL): Learning is performed with a critic without providing any information about the data (signal) class or explicit objectives. These RL algorithms are compelled to learn ideal objectives through trial and error.63,65 Multi-Agent System (MAS) based controllers and Brain Emotional Learning-Based Intelligent Controller (BELBIC) employ RL. Classification of adaptive intelligent control methods.
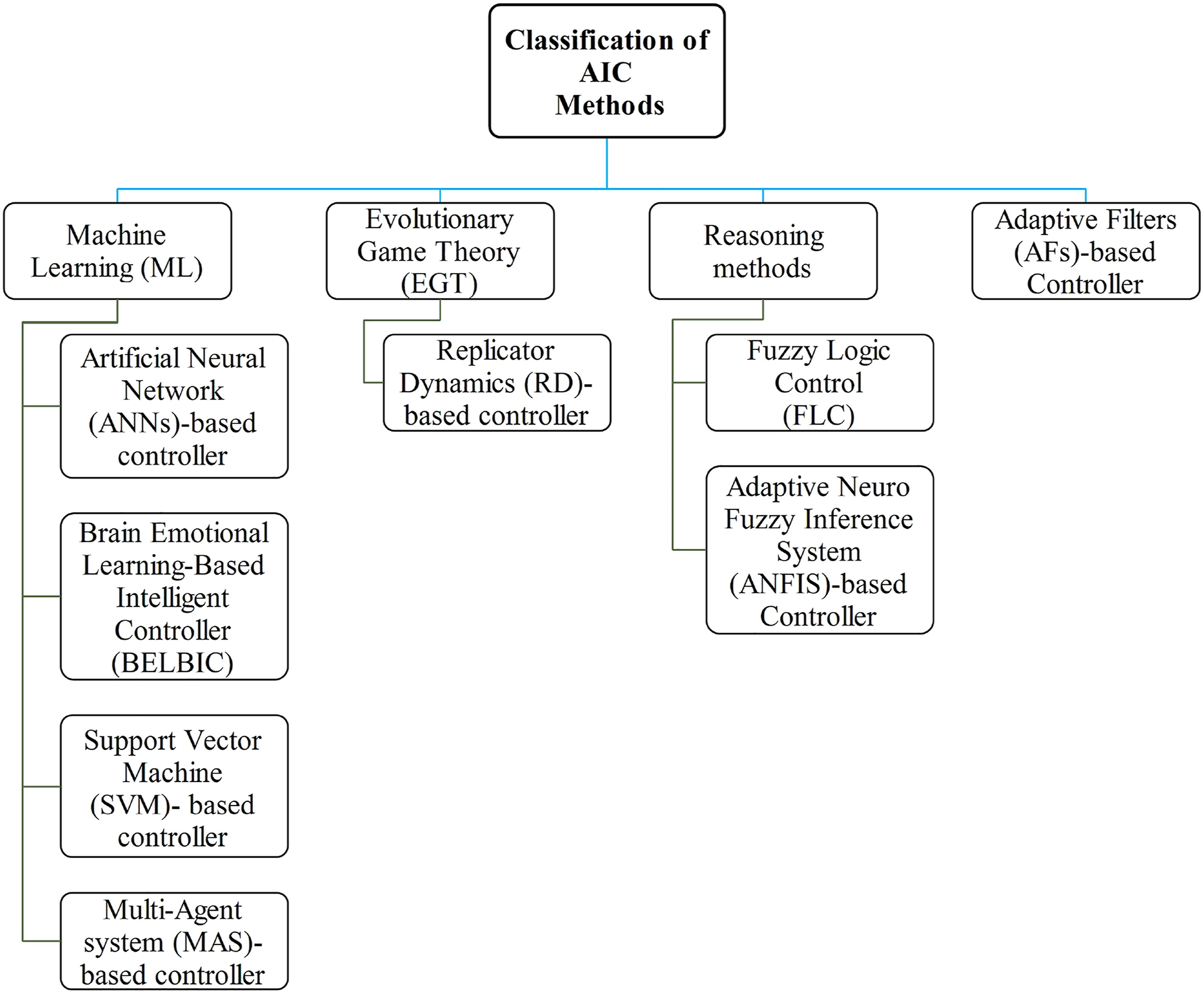
Furthermore, other AIC methods that incorporate Soft Computing (SC) or Computational Intelligence (CI) methods are, in fact, a subset of AI. 66 The SC/CI is described by the computer’s capacity to learn an explicit task from a provided sample data or observations from the experiments. 63 These methods include EGT which is an application of Game Theory (GT) in biological evolution, and Replicator Dynamics (RD) controllers belong to EGT. Other reasoning methods are purely based on AI and SC methods that emulate human decision-making. These methods include Fuzzy Logic Control (FLC) and Adaptive Neuro-Fuzzy Inference System (ANFIS). The following AIC method is AFs which belong to a digital signal processing system and majorly exploits AI and SC methods. Moreover, meta-heuristic algorithms belong to AI and are used for optimizing the AIC parameters. These methods include; Evolutionary Algorithms (EA) (e.g., Genetic Algorithms (GA)) and Swarm Intelligence (SI) algorithms (e.g., Particle swarm optimization (PSO) and Cuckoo Search (CS) algorithms).
Methods of AIC for smart civil structures
ANN-based controller
An Artificial Neural Network is a computational data-driven methodology of ML that endeavors to simulate the learning and memory abilities of the human central neurological system collectively with its neurons, axons, dendrites, and synapses. 62 The ANNs mimic the human brain in two distinctive ways: first, acquiring the information through the learning procedure, and the second one by storing the information in the interneuron’s connection strengths (synaptic weights). 67 The ANNs were first introduced by McCelloch 68 in the mid-’40s of the last century. 69 The initial research studies in utilizing ANNs in control of structures were carried out simultaneously by Ghaboussi and Joghataie (1995) 70 and Chen et al. (1995). 71 Since then, ANNs have been integrated with VCS for highly nonlinear modern structures. 72 Thus, the ANNs have been represented as a kind of dreamlike substitute to the conventional structural vibration control methods because of their high parallel scattered computational features of training, learning, adaptability, flexibility, noise immunity, nonlinear mapping capabilities, generalization ability, and robustness.1,21,25 Likewise, ANN has demonstrated extraordinary capacity in capturing the unknown or complex nonlinear relationships between independent and dependent variables and has shown higher adaptability towards the changes in the input to output data sets in solving nonlinear complex control problems.24,69
This paradigm of ANNs was begun with a model of perceptron, which is an algorithm of supervised learning in ML. The perceptron is the simplest primary model of ANNs as presented in Figure 4, having several nodes denote input, which is connected via synapses to various nodes. These synapses have weights accompanying them, and the summer function generates the value of each output node derived by multiplying each input node by the weight of the relevant synapse and adding bias if present, then these values are plugged into a threshold unit (activation function; such as sigmoid or relu) to generate inclusive output.
68
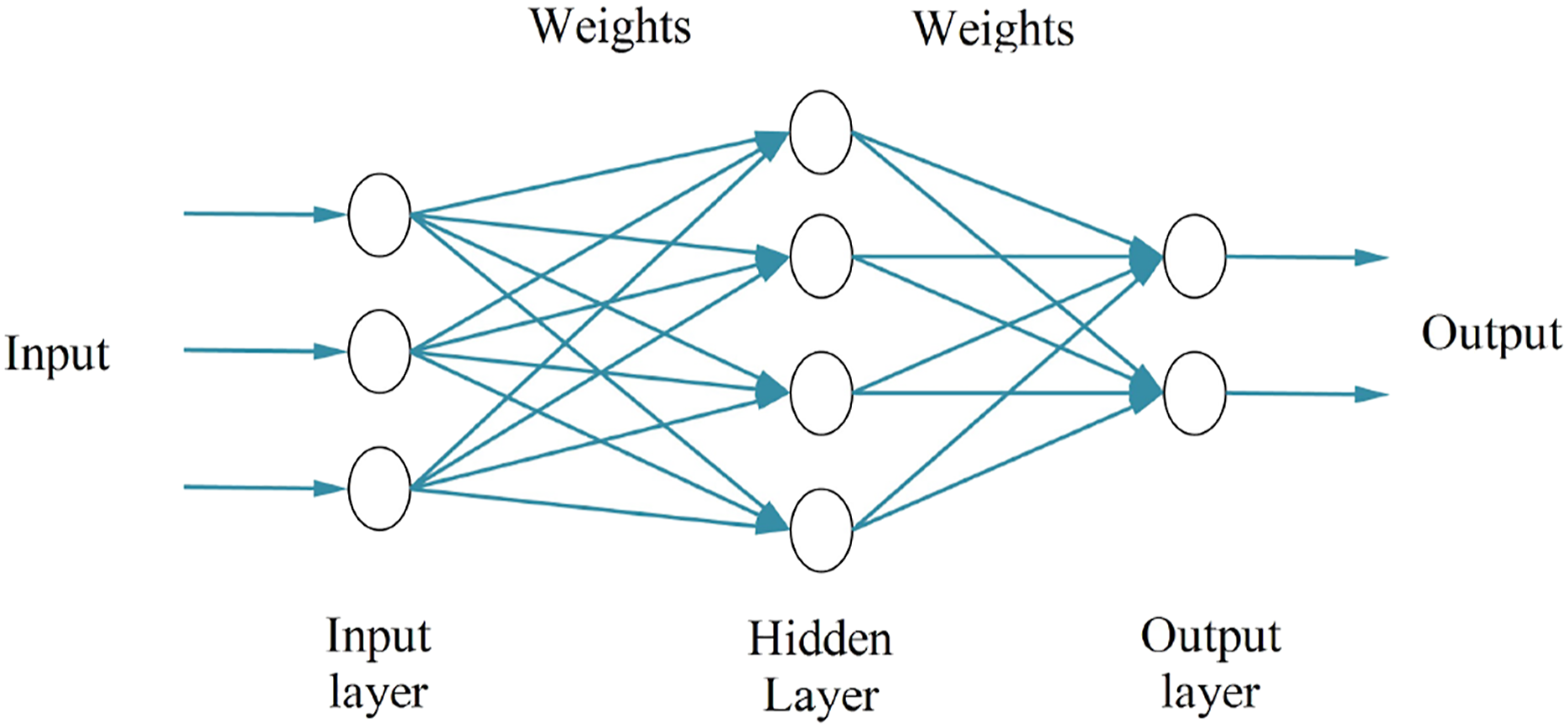
It was perceived decades ago that this setup is unsuccessful in learning even simple functions. So extra hidden layers were introduced. In this setup, the input layer feeds into one or more hidden layers before being fed to the output layer, empowering more complex behavior substantially. In particular, ANNs with one or more hidden layers are termed Multilayer Perceptron (MLP), as displayed in Figure 5. Multilayer Perceptron is the most popular ANNs method. Generally, conventional ANNs consist of three layers: input layer, hidden layer, and output layer.20,73 Mathematical model of a single perceptron. Multilayer perceptron.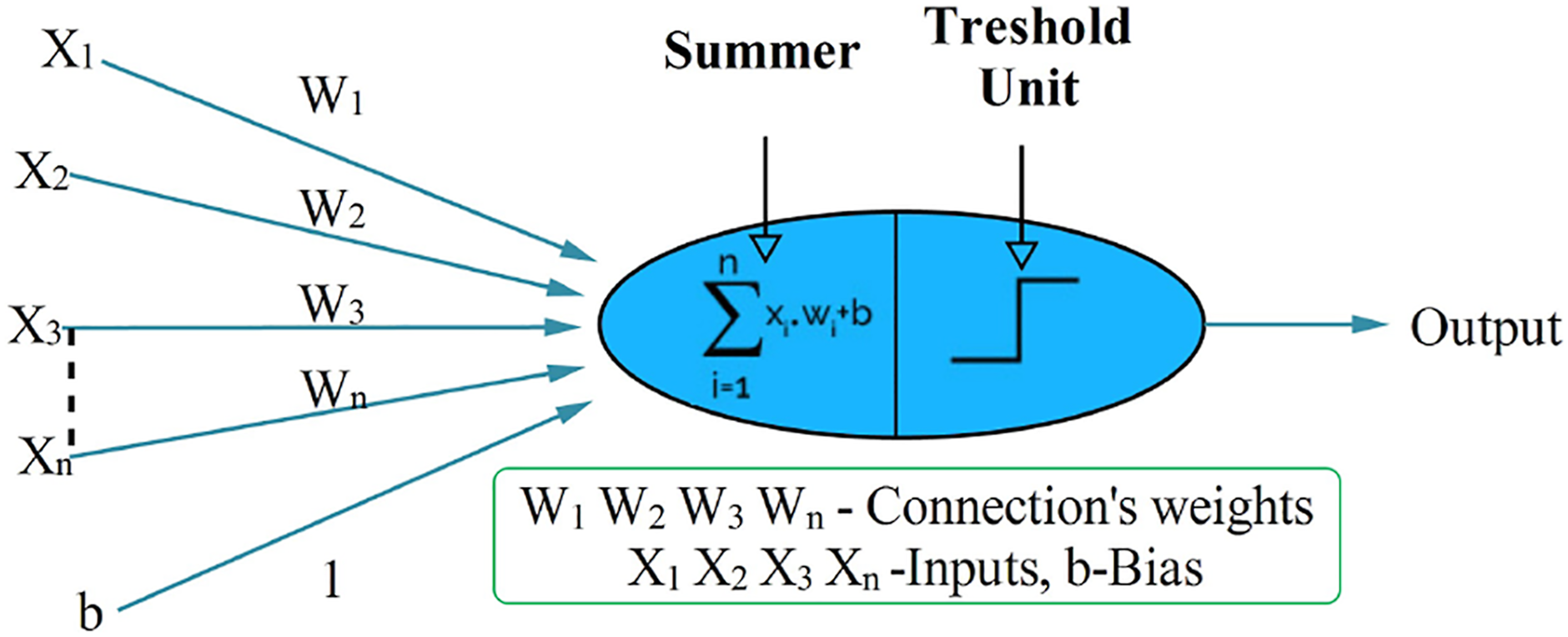
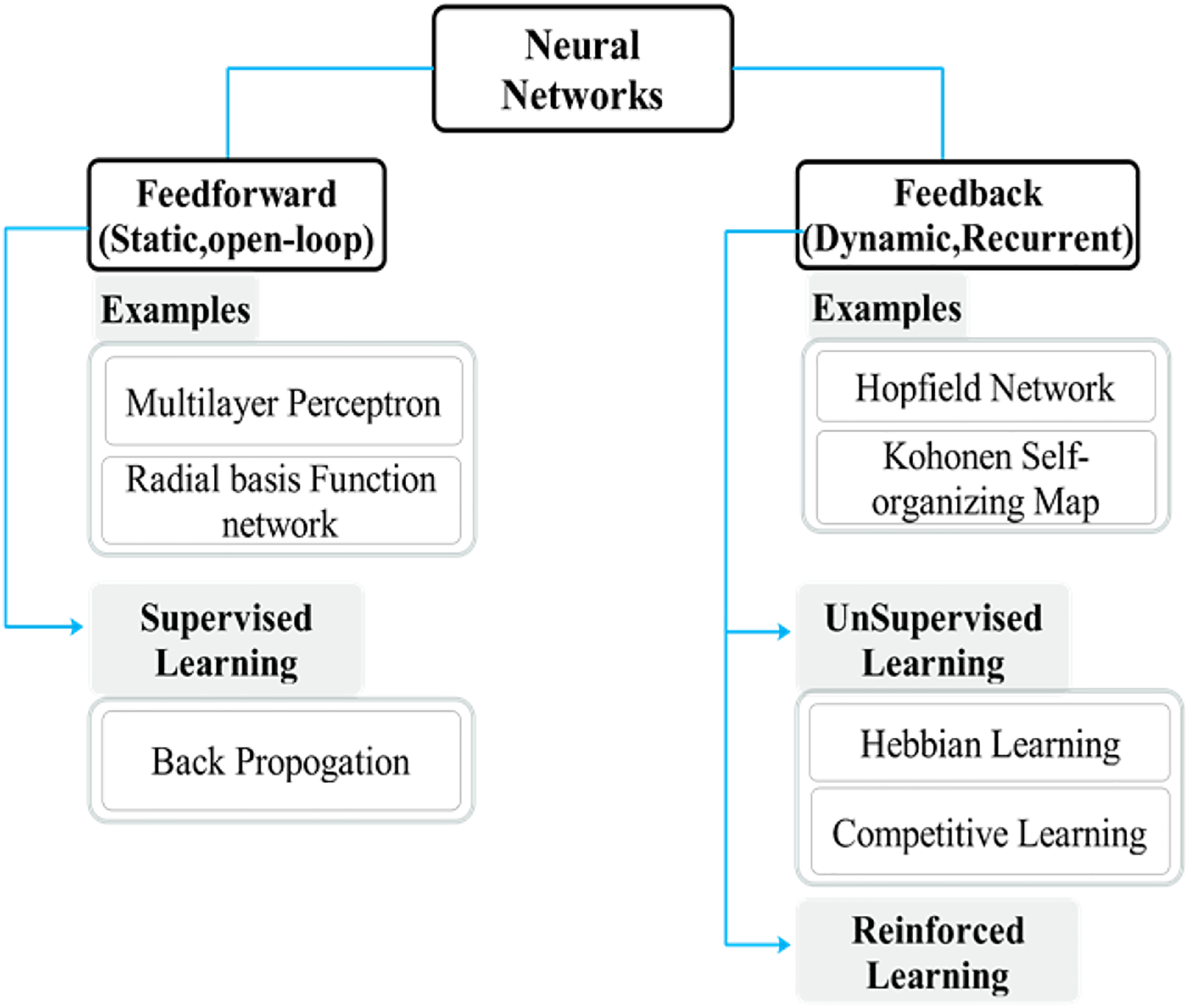
The ANNs are additionally categorized regarding to their network topology, for example, Feed Forward Neural Networks (FFNNs) and Feed-Back Neural Networks (FBNNs)/Recurrent Neural Networks (RNNs) or related to their learning algorithms. For instance, supervised learning, unsupervised learning, and reinforced learning are displayed in Figure 6, detail presented in the following sections with their utilization in ANNs (neuro) controller architectures.
57
Classification of ANNs
57
.
FFNNs and basic controller architectures
In FFNNs, Information flows forward that starts from the input node. All information flows to the output node through the hidden node, while the input layer does not participate in the processing of information. 69 Examples of FFNNs are MLP, radial basis function network, and Learning Vector Quantization Networks. 43 These networks utilized supervised learning methods that incorporate gradient-based methods, such as back-propagation, and are termed static networks because their mapping between the inputs and outputs is a static function. The three basic FFNNs modeling architectures for controller include; forward modeling, inverse plant modeling and, operator modeling. Their details can be found in the work of Housner et al. 14 and Brown et al. 74
FBNNs and basic controller architectures
The FBNN are dynamic mappings between inputs and outputs because the network’s output is fed back to the input layer or the intermediate layer. In this way, inputs are transferred in both forward and backward directions by forming a loop in the network architecture. The network’s output reflects the current and previous entries 69 ; these networks include the hope field network and Kohonen self-organizing maps. 43 In FBNNs unsupervised learning methods; include Hebbian learning and competitive learning. An example of the FBNN controller architecture is a specialized inverse plant modeling in which ANN is integrated into a closed-loop; its details can be found in the work of Housner et al. 14 and Brown et al. 74
ANNs based controllers
The ANNs based controllers can easily identify the structural system properties while avoiding the instability for the structures having higher uncertainties. The ANNs based controller’s parameters are attuned online based on certain error criteria. Most of these adaptive ANNs controllers are indirect adaptive schemes because, at first, it builds an ANNs model of the unknown plant, which is then further utilized to predict the behavior and control the response. Some of the famous ANNs based controllers included; Model reference neural controller, direct learning, and indirect learning Controller.14,20 Model reference neuro-controller: In these controllers, the feedback is carried out by the conglomerate controller/plant emulator ANNs through the back-propagation algorithm. Two errors (model and reference) are generated as displayed in Figure 7 and described in equations (1) and (2) Model reference neuro-controller.


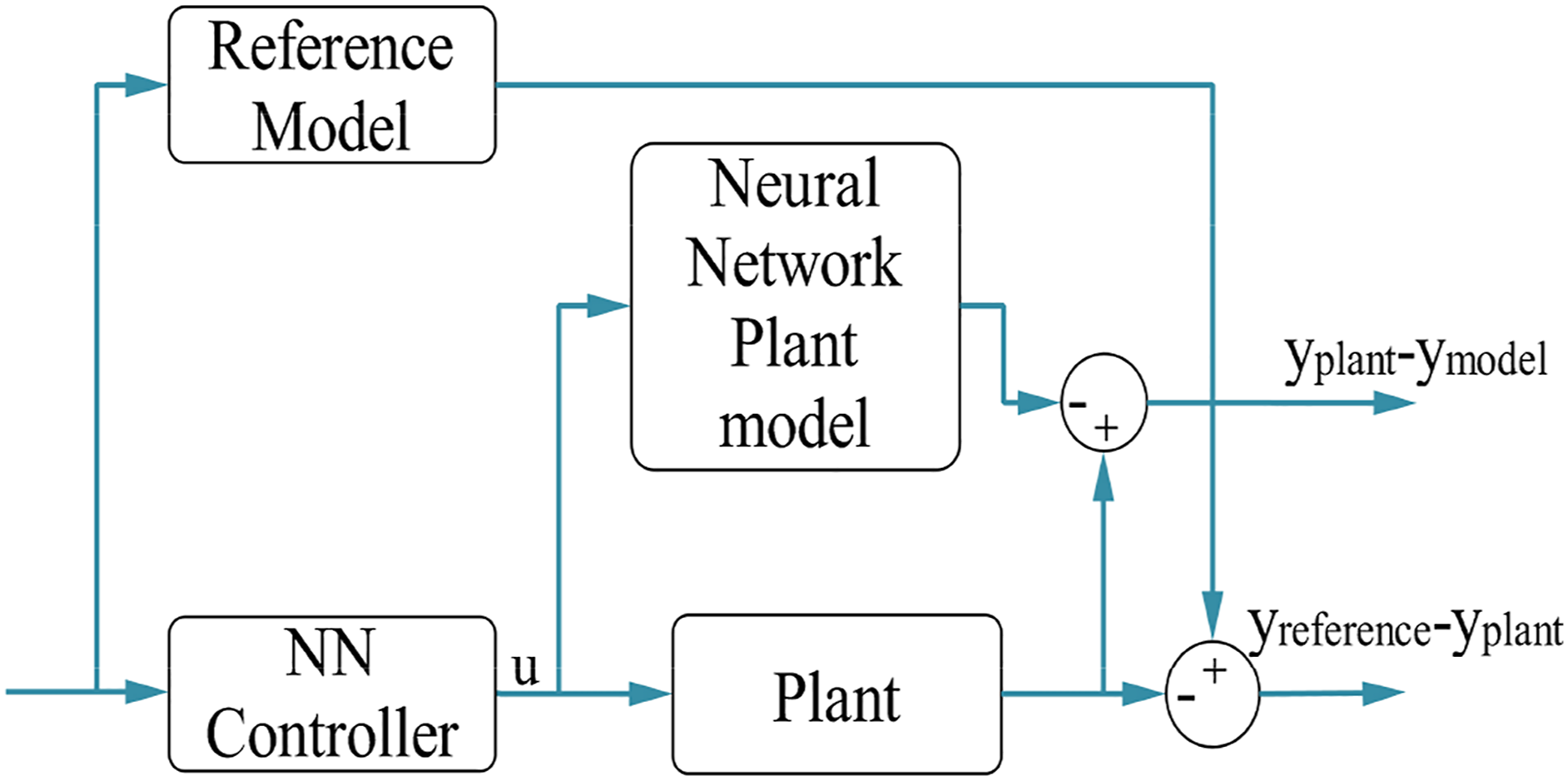
As the convergence approaches, both errors converge to zero, and the approximation of reference error becomes accurate. Thus, the extended ANN has two functions: adaptively estimate the next state of the plant in a given state, and compute the control signal required by the plant to minimize the reference error 64 (see Figure 7).
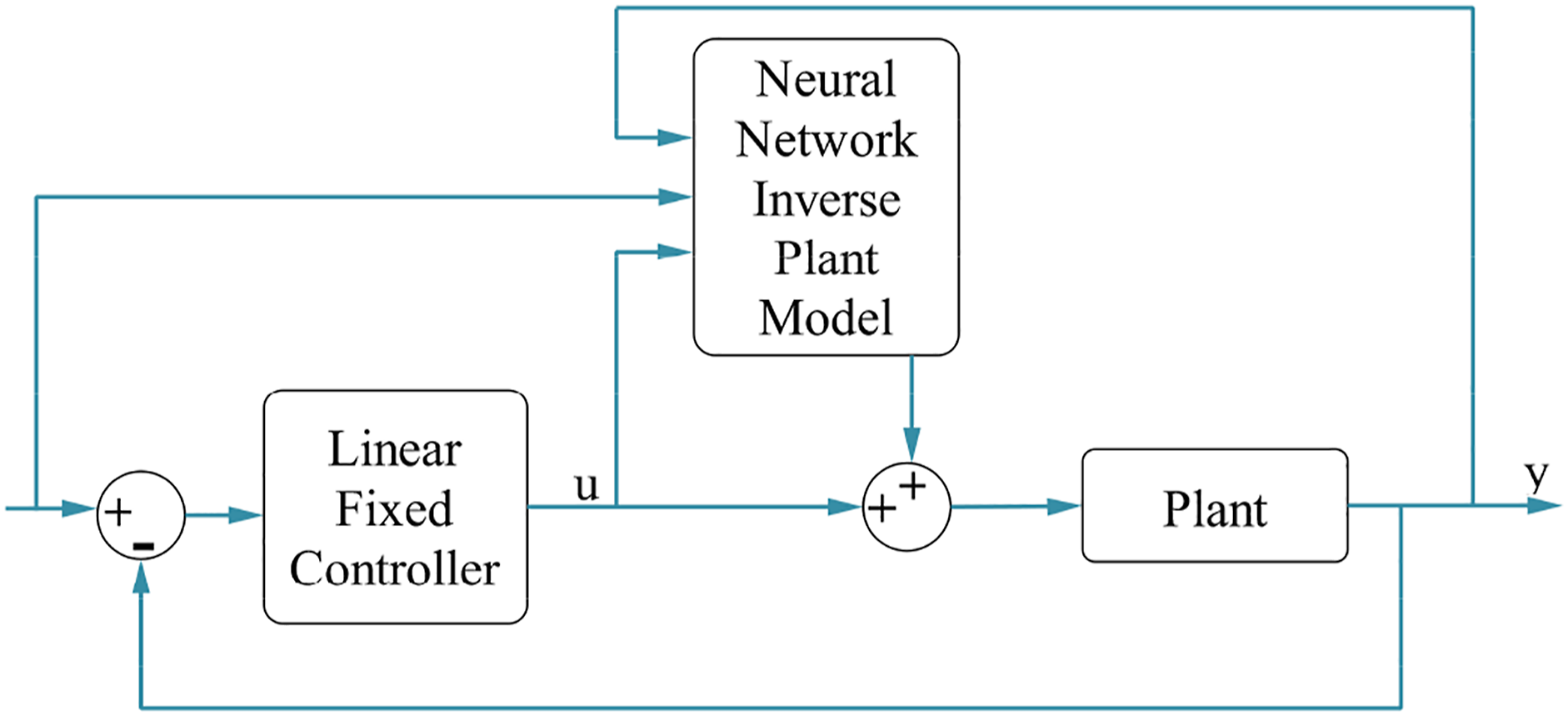
Direct learning neuro-controller: These controllers are generally based on a combination of an MBC with a data-driven learning algorithm (neural networks). This scheme is commonly termed the modular design of adaptive controllers. 44 A fixed linear MBC is used to train the neural network, as shown in Figure 8 In essence, the neural network is to learn the inverse model of the plant, using the plant output, the set point, and the linear controller signal as the input and the control signal as the output. With the change of the system’s operating point, the nonlinear model of the required control surface is established online by neural network. Finally, these control signals generated by the neural network are added to the controller’s control signals that enhanced its performance. 14
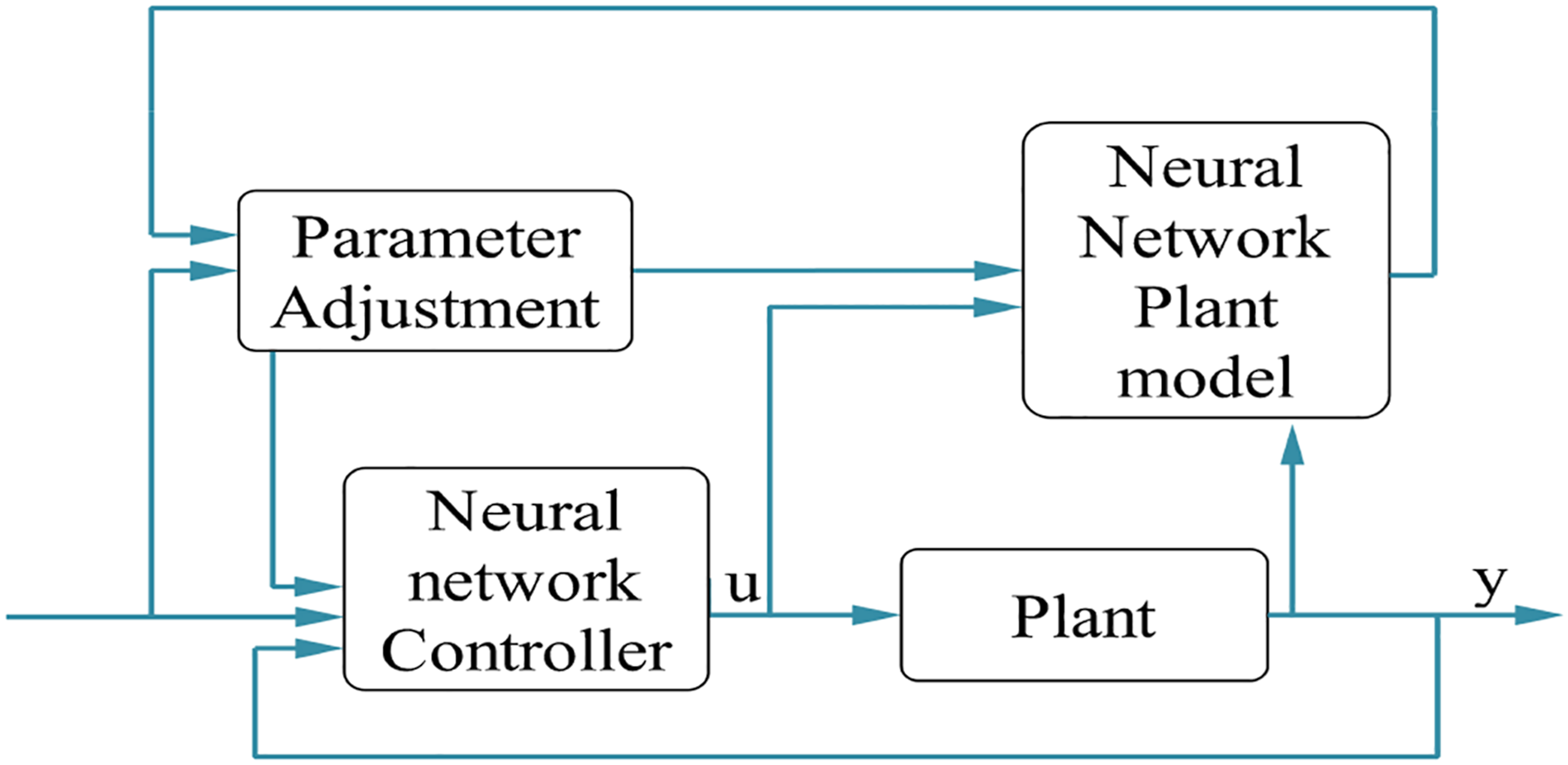
Model predictive neuro-controller: These controllers are also named indirect learning control schemes. In these controllers, the neural network-based plant model is used to predict the future behavior of a given plant, and the error is used to fine-tune the neural network controller’s parameters as presented in Figure 914,75
Direct learning neuro-controller.
Model predictive neuro-controller.
ANNs Applications
Blachowski and Pnevmatiko 20 presented a study utilizing ANNs controller for attenuating the seismic vibration, and their proposed controller was tested on two types of building structures: single storey and other is 12-storey building structure. ANNs based controller effectively reduced the structure’s response as compared to the convention LQR controller. Lara et al. 27 presented FBNNs named Nonlinear Auto-Regressive models with eXogenous Inputs (NARX)-NNs and FLC based control of 2-storey building structures equipped with MR damper; both of these controllers have produced significant results in achieving the control objective. However, the NARX-NNs-based controller performed better than the FLC controller. Rababah et al. 24 proposed a back-propagating ANNs based AVC algorithm for a seismically excited highway bridge structure equipped with hydraulic actuators. The controller performance is compared with the conventional LQR and H2 MBC algorithms, but their proposed ANNs controller efficiently reduced the seismic responses with higher robustness and adequate stability than these MBC controllers.
HE et al. 76 proposed a back-propagating ANNs based controller for a seismically excited highway bridge structure utilizing MR damper. Further, they utilized GA to optimize the proposed controller’s parameters and reduce the controller’s energy consumption. They compared the performance of the proposed controller with the Lyapunov and unoptimized BP-ANNs based controllers and concluded the higher performance of GA-back-propagating ANNs controller in terms of reducing peak responses with higher stability and consuming minimum energy. Rathi et al. 77 proposed an ANNs based control Algorithm for the seismically excited 2-storey building structure equipped with Active Tendon Control System(ATCS). In their proposed scheme, the stability of the error dynamics model is assured by the Lyapunov stability analysis. They concluded that the anticipated controller has more robust stability and performance characteristics. Chang and Sung 13 proposed an ANNs based controller for attenuating the seismic vibrations of a 3-storey building structure provided with an Active tuned Mass damper(ATMD) system. Their Proposed ANNs controller exploited structural model energy as an objective function for tuning the network and was named as modal-energy-based neuro-controller, the proposed controller had shown higher efficiency in achieving the control objectives, especially in reducing the model energy and structural responses compared to MLP-based controller.
Chen 1 proposed an FFNNs based controller utilizing GA for optimizing its parameters (e.g., to search for initial weight and bias) and modified the Newton method for enhancing its training performance. This controller was validated on single-storey shear building structure equipped with ATMD for system identification and vibration suppression. The experimental results had shown higher efficiency of the proposed controller in tracking control and vibration suppression. Next, Bigdeli et al. 72 presented ANNs based controllers utilizing Wavelets. Their proposed controller is applied to an ATMD equipped 3-storey building subjected to earthquake loads. The proposed controller had shown high performance in reducing the structural response and model energy due to higher and efficient ANNs training and calculation process. Finally, Gu et al. 78 developed Radial Basis Function Neural Network-Based Fuzzy Logic Control (RBF-NFLC) for the model of seismically excited 3-storey base-isolated shear frame building utilizing magnetorheological elastomer isolator. Furthermore, they utilized GA for MOO named as Non-Dominated Sorting Genetic Algorithm II (NSGA II) with dynamic crowding distance (DCD) concept for finding the best parameters (e.g., Fuzzy rules and MFs) with higher fitness values. Their comparative analysis showed the high performance of the proposed RBF-NFLC algorithm in reducing the overall structural response compared to traditional Bang–Bang control algorithms and other passive and fixed structure scenarios from SMC responses.
Brain emotional learning-based intelligent controller
Brain Emotional Learning Based Intelligent Controller (BELBIC) developed by Lucas et al.
45
is a cognitively based variant of reinforcement learning with a critic (evaluative control). The BELBIC implements the computational network model developed in
79
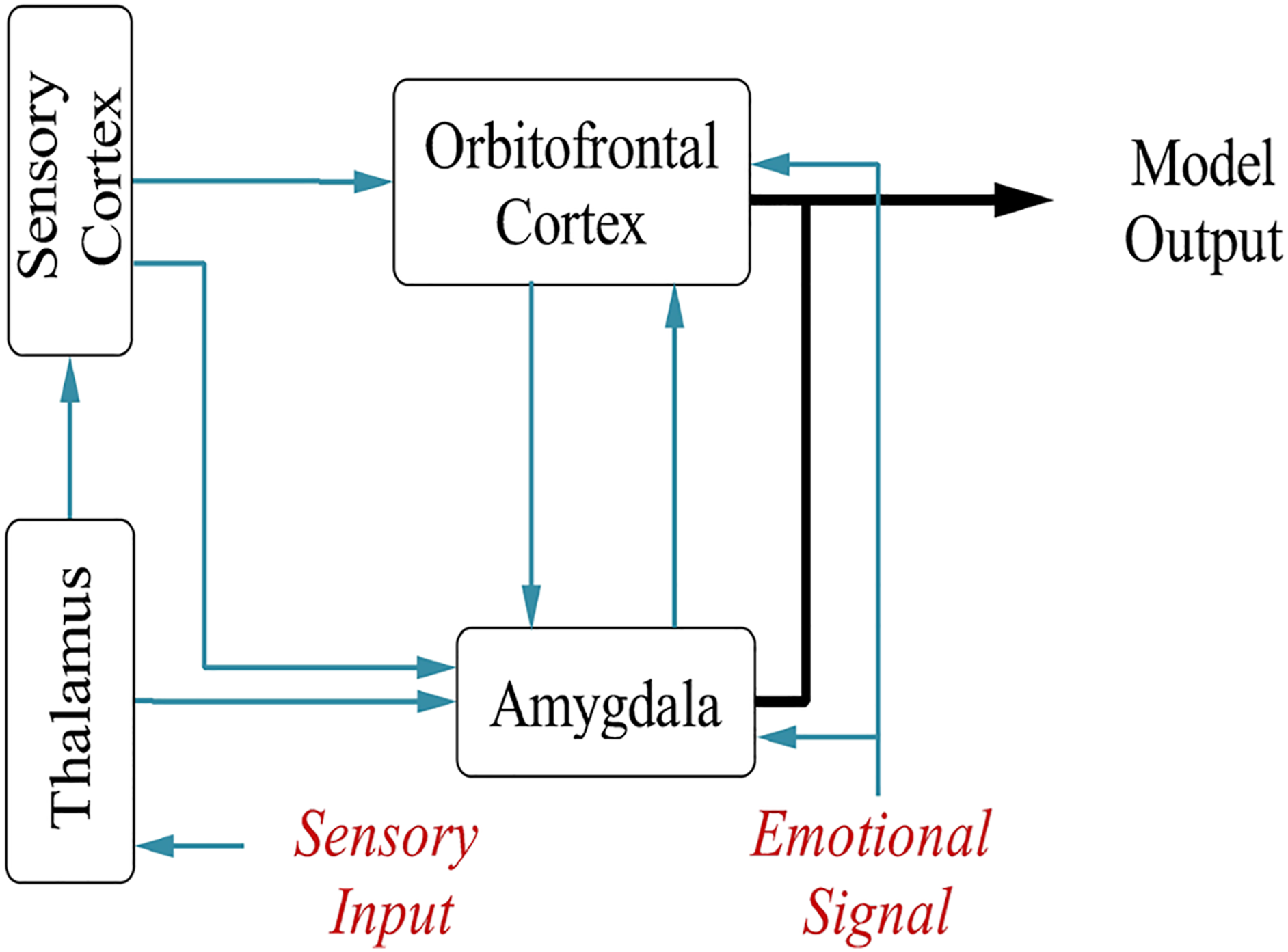
which mimics the parts of the mammalian brain and identifies to produce emotions, that is, the amygdala orbitofrontal cortex, thalamus, and sensory input cortex, as presented in Figure 10. The BELBIC is divided into two parts: the amygdala and the orbitofrontal cortex. The amygdala receives inputs from the thalamus and sensory cortex, while the orbitofrontal cortex receives inputs from the cortex and amygdala. The BELBIC scheme also receives Emotional Signals (ES) as inputs in its amygdala and orbitofrontal cortex regions and integrates the output from these two parts to express the overall output of the scheme.
80
Schematic structure of brain emotional learning based intelligent controller.
45
Brain Emotional Learning Based Intelligent Controller model application within a distinctive feedback control block diagram can be seen in Figure 11. The model implicitly uses critic, learning algorithms, and action selection mechanisms used in the functional implementation of emotion-based or usually reinforce learning-based controllers all at once.
45
Feedback control block diagram of brain emotional learning controller.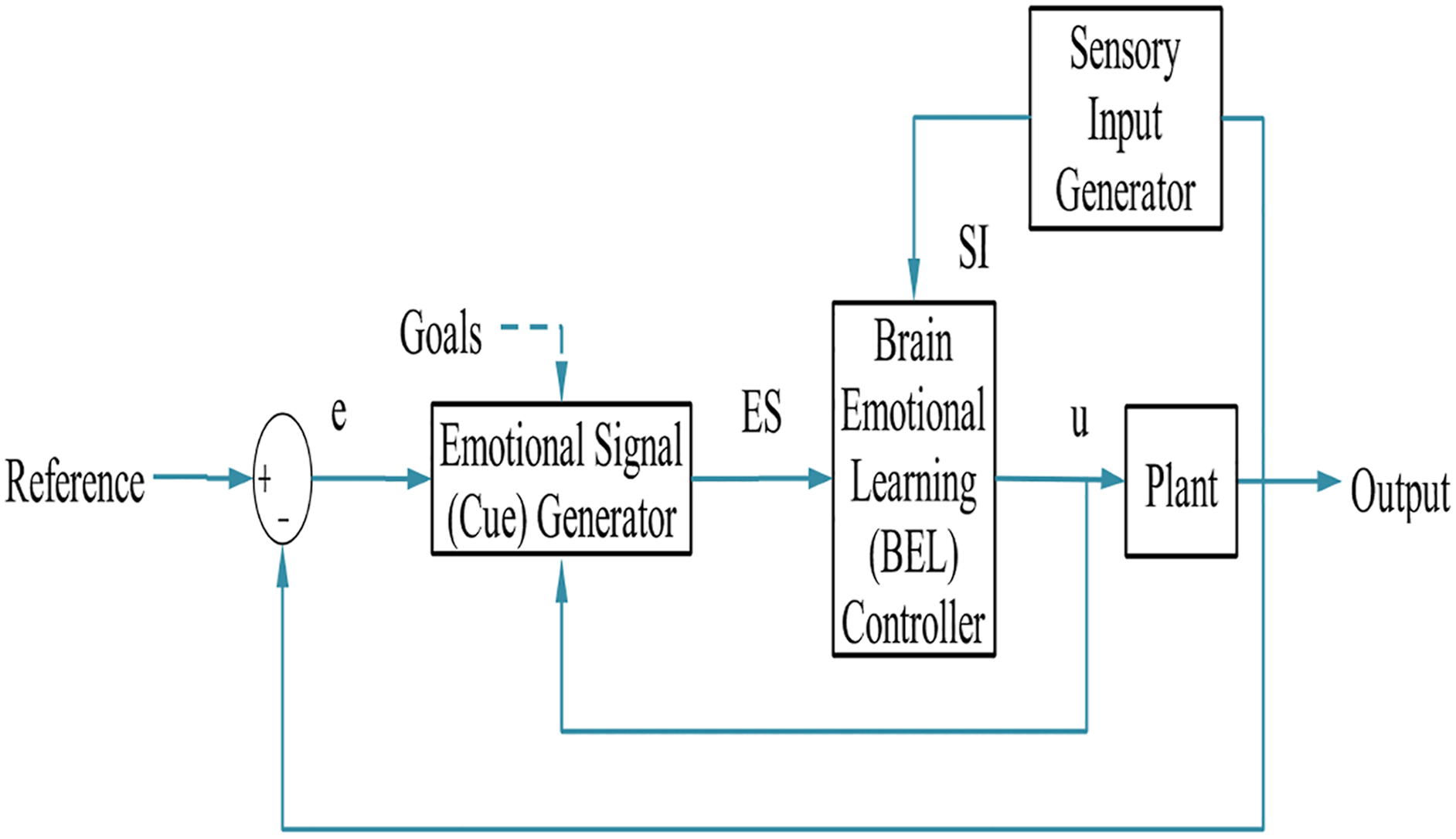
These controllers use critic to continuously evaluate the outcomes of specified control actions based on overall objectives or performance indicators in any given state, and generate analog reinforcement ES (cues) to guide learning in the controller block. This cognitive form of reinforcement signal has been expressed as an emotional cue/signal, for it is the function of emotions like stress, concern, fear, satisfaction, and happinessto assess the environmental conditions for objectives and utilities and to deliver cues regulating action selection mechanisms. 45 This controller has two significant inputs: Sensory Input (SI) and Emotional Signal (ES), and the flexibility in defining SI and ES makes BELBIC an effective controller over other MBC schemes. 81 Moreover, it is significantly an incredible scheme for the real-time control of civil structures because of the low computational complexity, appropriate learning, abrupt training capabilities, 80 robustness towards parametric changes, and handling uncertainties. 45
BELBIC Applications
Braz César et al. 82 developed a BELBIC combined with PSO algorithms for the seismic vibration control of single storey building subjected to seismic loading and the actuating mechanism is incorporated through MR damper. Their proposed PSO optimized controller has shown higher performance in achieving control objectives. Braz César et al. 83 presented a BELBIC combined with PSO algorithms for the seismic vibration control of a 3-storey building structure equipped with MR damper. The simulation results presented the high efficiency of proposed schemes in regards to reducing the overall structural response.
SVM-based controller
The SVM is an ML frame that uses the linear function hypothesis space in the high-dimensional feature space and is trained by the learning algorithm of optimization theory, which applies the learning bias obtained from the statistical learning theory. 84 single storey Machine was presented by Boser, Guyon, and Vapnik 85 at the Computational Learning Theory (COLT) conference in 1992. A few years later, Cortes and Vapnik 86 introduced the soft margin classifier and further extended it to the regression case. 87
The SVM not only solves the classification and pattern recognition problems but can also solve the regression fit problem
88
by generating input–output mapping functions from a set of labeled training data. These functions can be regression functions or classification functions. For example, the input data class can be mapping functions, linear functions, and nonlinear kernel functions. For classification, usually, the input data is converted into high-dimensional feature space. In this way, the input data become more divisible than the same input space. The maximum-margin hyperplane is then applied to find the separating hyperplane, and the given data is optimally classified into two categories (i.e., positive and negative) as presented in Figure 1289,90 Graphical illustration of support vector machine.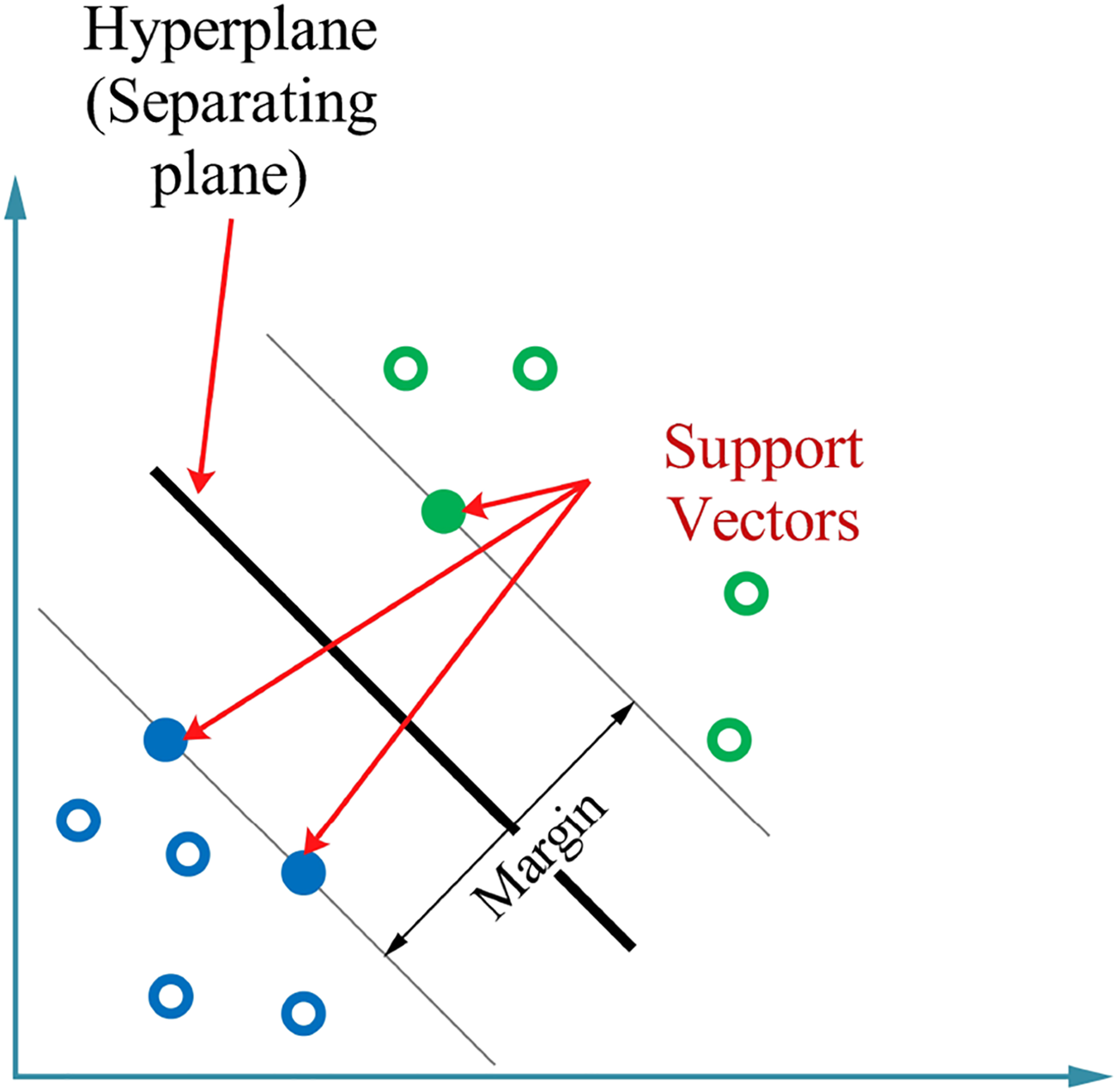
The optimal separating hyperplane is determined through solving an optimization problem, defined as
Support Vector Machine has the advantage of high precision because of its decent convergence and generalization abilities, and it can generate precise predictions for various complex tasks. 84 In addition, it has the excellent ability to be used as a universal approximator of any multivariate function for achieving any ideal level of precision. Therefore, SVM is of particular interest in modeling nonlinear systems, plants/processes that are unknown or partially known with highly nonlinear behavior. 92 All these advantages make SVM paramount for being applied for the vibration control of nonlinear complex civil structures.
SVM applications
Li et al. 93 proposed an SVM-based semi-active control of three-storey shear-type frame structure under seismic waves. Their proposed SVM model is constructed and trained to mimic the functioning of the LQR controller and mentioned as a structure SVM system model. Similarly, this SVM model includes both the observers (sensors) and controllers of the control system. The comparative results validated the sound performance of the SVM-based controller in reducing structural responses.
MAS-based controller
Holland
94
was the first to present a concept about the agent as an artificial organism, evolving in the inhabitants of its breed, tending to learn and adapt to its environment to survive in it, and defeat the competitors.
95
Thus, the agent is considered as a computer system (hardware/software). It is positioned within an environment that observes with the help of sensors and can freely act upon any changes in the environment adaptively or intelligently to achieve its designed goals (see Figure 13).96-99 Architecture of an agent.
99
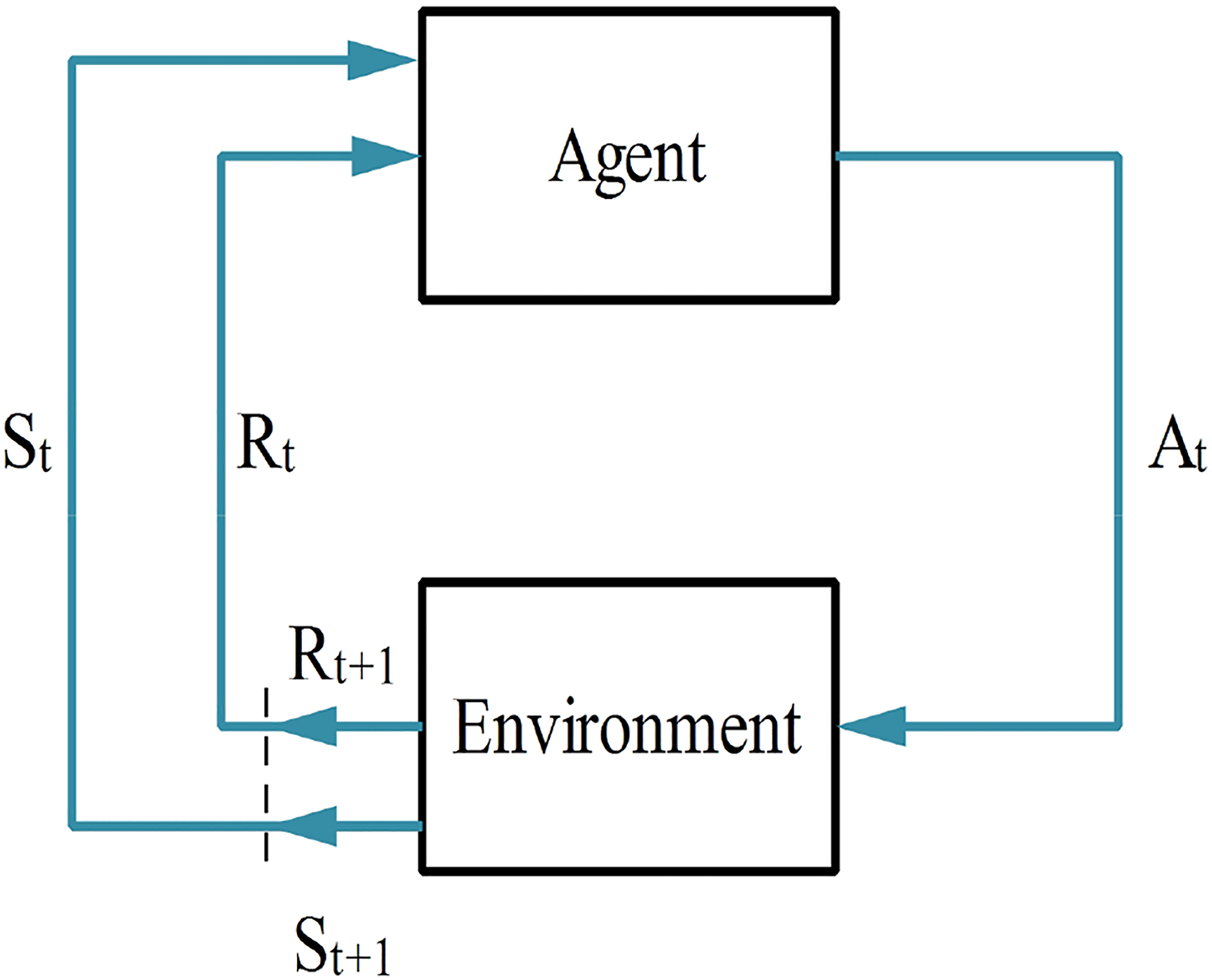
An agent observes state S t of the environment at time t, chooses to take action A t , after that, the environment changeover to state S t + 1 and the agent receives reward R t + 1. Those actions that produce a positive effect will have a higher possibility of being executed again. To this effect, the agent receives a reward signal that shows the quality of the actions taken. Multi-Agent Systems chiefly learn through trial and error to find a strategy, characterized as a mapping from states to actions, that maximizes its long-term expected reward. 99 It means that, in the case of supervised learning, the environment or an agent providing feedback acts as a “teacher or critic” and acts as a “passive or observer” in the case of unsupervised learning. 98
Base on learning, the MAS is further distinguished into two primary classifications: centralized (isolated) and decentralized (interactive) learning. The centralized learning process is consolidated by a single-agent independent of other agents to achieve the overall system’s objectives. Conversely, the decentralized learning process includes multiple independent agents in the same learning process to accomplish their local objectives. 98 These decentralized MAS learning systems approach work on dividing the problem into multiple sub-problems and then solving these problems by assigning each sub-part to each agent; this idea is also known as divide-and-conquer. 100 Multi-Agent Systems can be characterized as a system in which self-sufficient interrelating artificial intelligent agents cohabiting in an environment, constantly cooperating toward seeking specific independently held conceivably conflicting objectives. No agent has the surety to be fully informed about the other agents’ objectives nor has it the surety to be fully informed about the overall state of the environment.99,101 While focusing on the agent’s collaboration, it perceives insight from other social structures in the animal kingdom that contain an assortment of individuals with their characters. It additionally draws strongly on Game Theory (GT).99,102
The collaboration of multiple self-directed agents offers to ascend to extremely dynamic and non-deterministic conditions, causing the complexity in applications; therefore, it is aptly necessary for the system’s success that the agents can learn their optimal behavior to adapt to new situations or circumstances. Therefore, learning is essential, and it turned into the most significant challenge to increase qualitative perceptions into the subsequent system dynamics. To overcome this challenge and formally study the multi-agent learning dynamics in strategic interactions, Evolutionary Game Theory (EGT) has been successfully employed. 101 Borgers and Sarin 103 were the first to mathematically associate agents learning with EGT, portrayed by how agents lack complete information, and both these fields are involved with dynamic environments with an extreme level of uncertainty. 101 The concepts of evolution in EGT prove appropriate to define the learning process in MAS instead of being realized in biological evolution meaning. 104 This learning process of the agents is controlled by RD that helps them perform dynamically in the face of competition or real-world conditions. 105 These potentials bring in the concept of an agent appropriate for developing a unique framework for control systems for solving computationally complex structural vibration control problems under resource constraints. Some of these examples are presented in the coming section.
MAS Applications
Multi-Agent Systems control systems have shown great success in recent years. Soto and Adeli 96 presented innovative Multiagent Replicator Controllers (MARC) for sustainable vibration control of smart structures grounded on three ideas: Agent System (AS), RD, and energy minimization. They presented two techniques: Centralized Single-Agent Replicator Controller, in which single-agent is interpreted as a centralized replicator controller(CRC) to make the control decision in real-time for the entire structure, and the second one is the decentralized MARC, in which the whole structure is divided into a set of substructures, and forces on the interfaces between the substructures are treated as external disturbances on each substructure. That enabled every substructure with their controller modeled as an agent; thus, complete structure control is governed by MARC. They applied these control schemes to 3-storey steel frame building, and 20-storey steel benchmark structure subjected to seismic excitations and produced efficient results compared to conventional control algorithms. Subsequently, Soto and Adeli 106 presented decentralized MARC optimized with a modified neural dynamics optimization model to control 20-storey steel building. This optimization helped find the Pareto optimal values for the MARC algorithm parameters, eventually helping achieve maximum structural performance with minimum energy consumption. Also, their proposed hybrid scheme bested the traditional LQR control algorithm.
RD-based controller
John von Neumann and Oskar Morgenstern 107 studied human behavior and strategic decisions using mathematical theory and brought forth Game Theory, 39 which was continued by Nash 108 by presenting the concept of Nash Equilibrium (NE). The NE is considered the focal idea of GT. The concept of the NE was further refined by Maynard Smith. 109 He presented the main idea of an Evolutionary Stable Strategy (ESS). 110 By this introduction, the utilization of GT in biological evolution is initiated and termed as EGT, which was achieved by reinterpreting the concept of payoff (utilities) in economics interpretation into the expressions of fitness, that is, evolutionary terminologies of reproductive success of the engaged individuals. 111 In EGT environment, the essentials of conventional GT are valid; however, no individual expressly makes decisions. Since the whole group of players is engaged in a game setting and properties that change their behaviors are examined. Each player in EGT selects a strategy from a particular set of strategies to win the game. As a result of this analysis, the individual (player) that has the highest capability of surviving is identified and named as ESS. 112 To study ESS, the idea of “Replicator Dynamics (RD)” was proposed by Taylor and Jonker. The RD depicts how the population shares associated with different strategies evolves considering their collective influence on their fitness. 113 This substantial attribute permits the RD to acquire the principle of selection by providing a linkage between the biological concept of ESS 109 with the economics concept of NE. 108
The RD is a simple model of evolution and prestige-biased learning in EGT. 114 This model presumes replicators (types) in large numbers. Every replicator has a payoff (fitness) value allocated to its interaction with other replicators and its fitness in that population. Then the comparison of the payoff of each replicator is performed for an expected payoff (fitness) value. This comparison helps determine the better or worse performance of each replicator compared to the expected payoff value. The fundamental concept in the RD model is that those replicators having higher performance value related to the population’s average fitness value will receive a higher share in that population whereas, those replicators having lower value (performance) related to the average fitness value will receive a lower share in that population. 115 In simple words, those individuals with high performance will have more offspring, and therefore their occurrence in that population increases.
The following formula represents the Replicator Equation
The applications of RD for the vibration control of smart civil structures have been recently increased; some of them are presented in the following section.
RD Applications
Soto and Adeli 96 presented a unique combination of the RD method with Agent System (AS) that created two new control methods: A Single-Agent Centralized Replicator Controller and a decentralized Multi Agent Replicator Controller (MARC) to control a 3-storey steel frame building and 20-storey steel buildings subjected to seismic excitations. Their proposed controllers effectively minimized the energy consumption and provided decent robustness and adaptively, which is confirmed by comparing with other conventional centralized and decentralized LQR control algorithms. Furthermore, Soto and Adeli 106 further investigated these control schemes in finding the Pareto optimal values of these RD-based controller's parameters. This Multi-Objective Optimization (MOO) was carried out by a modified neural dynamics model of Adeli and Park. 116 That is applied to a 20-storey building structure subjected to seismic excitations. Their results have shown great performance in reducing responses compared with the conventional centralized and decentralized LQR control algorithms.
Another study incorporating RD controller and modified neural dynamic model utilized as MOO to obtain pareto optimal RD controller parameters were presented by Soto and Adeli 117 and applied an 8-storey irregular steel frame building. This hybrid control algorithm produced satisfactory results in reducing the structural response compared with LQR and other traditional control methods. The application of RD controller is not limited to building structures but also presented for the control of base-isolated highway bridge structure by Soto and Adeli 15 in their recent study. The structure is equipped with both a base isolation passive system and a semi-active MR Damping system. This developed scheme is compared with LQG and Lyapunov controller and concluded the higher performance of RD controller.
Fuzzy logic control
Fuzzy Computing is a kind of SC technique grounded on the description of “degrees of truth” instead of the usual Boolean logic of computers, in broader terms also acknowledged as “Fuzzy Logic” (FL).
50
The fuzzy theory was introduced by Zadeh
118
in his seminal article and extended by presenting the concepts of fuzzy algorithms,
119
fuzzy decision-making,
120
and fuzzy ordering,
121
respectively. The analysis of complex systems and decision processes, which formulated the basis for fuzzy control, was proposed by Zadeh
122
by introducing the concept of linguistic variables to use fuzzy IF−THEN rules to detail human knowledge and reasoning capabilities. Mamdani and Assilian
123
established the essential system of FLC, and the pioneer FLC for a full-scale industrial process was proposed by Holmblad and Stergaard.
124
Brown et al.
125
utilized right off the FLC in structural engineering in 1983. Faravelli and Yao
126
introduced the guiding principle for applying FLC for AVC in civil structures. Further, Aldawod et al.
127
developed an FLC for AVC systems in the wind-excited tall structure. Since then, the FLC schemes are adapted for the VCS, and it is the most popular as compared to other traditional fixed model-based techniques because of their robustness towards states of uncertainty, nonlinearity, and complexity because of its intrinsic capabilities of treating linguistic variables (like low or high) and making uncertain reasoning to formulate the relationship between system variables.21,28 Besides, it can also develop adaptability for control problems by adjusting its rules or membership functions and extra ability to utilize learning techniques without a precise mathematical model. Decisively, all these characteristics make FLC capable of coping with the structural nonlinearities, uncertainties caused by large displacements, or material nonlinearity and damage. In short, it can easily handle the hysteresis behavior of the structure under external loads.21,129–131 General presentation of feedback-FLC for nonlinear civil structures can be seen in Figure 14. Typical feedback-fuzzy logic control for civil structure.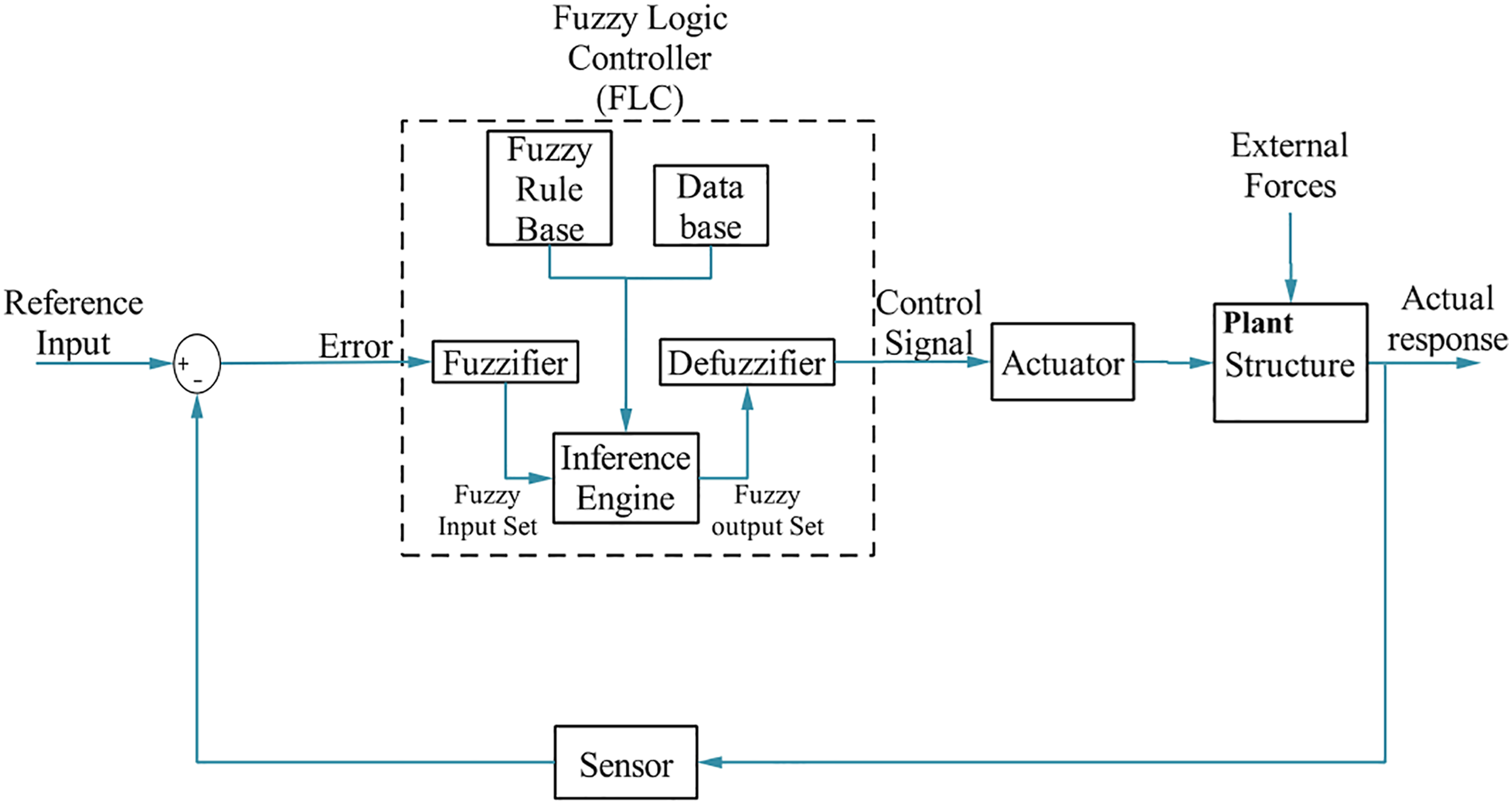
General architecture of an FLC as described in Figure 14 involves several steps as follows22,128,132 Fuzzifier (the controller input variables, measured from the structure, are fuzzified into linguistic terms); this is the first step of this system in which the mathematical/crisp information is converted into fuzzy sets. The degree of membership is allocated to each fuzzy input value between 0 and 1, and relationships are established, which are utilized for fuzzy operators and or arguments aggregate rules. Each fuzzy set can utilize various Membership Functions (MFs), for example, triangular, trapezoidal, and Gaussian. Rule base (containing fuzzy); is the second part consisting of the fundamental parameters of the system, which are related to the magnitude, and size of the fuzzy system. Fuzzy rules are made based on “if-then” paraphrases, and each rule consists of antecedent and consequent propositions. The decision Matrix comprises these fuzzy rules. Inference system or engine (generate fuzzy output for each rule); the third part defines the communication parameters related to the topology of the fuzzy system, which incorporate the introduction, result, and weight of the fuzzy rules. After the values are fuzzified, the inference engine decides the output by applying fuzzy operations to map fuzzy inputs to outputs. The inference engine can make decisions either utilizing Mamdani or Takagi-Sugeno-Kang (TSK) engines. Defuzzifier (providing the crisp control signal); finally, the fourth part transforms the output values generated in fuzzy logic language into the crisp/mathematical value.
FLC applications
Zabihi-Samani et al. 131 applied an FLC control algorithm combined with three other algorithms naming; discrete wavelet transform, modified Bouc-Wen model, and geometrical nonlinearity algorithm. They named this hybrid scheme a cuckoo-search wavelet-based fuzzy logic controller (AC-SWBFLC). Moreover, they incorporated CS to optimize the placement and the number of MR dampers and sensors and find optimal control forces. Finally, they applied their proposed controller on 3-storey, 4-storey, and 8-storey building numerical models incorporating MR damper under seismic excitations and concluded their control strategy performed efficiently compared to the passive-off, passive-on, conventional LQR, and FLC controllers. Zamani et al. 133 proposed two control strategies named multi-objective modified clipped optimal (MOMCO) which is a combination of COC with LQR and multi-objective CS algorithms, and adaptive fractional order fuzzy PID (AFOFPID) controller, which is a combination of multi-objective CS and LQR algorithm. They tested their efficiency on base-isolated building equipped with a magnetorheological damper, concluded that the AFOFID controller performs better in reducing the deformation of isolation system and superstructure accelerations under seismic excitations. Azizi et al. 130 investigated the efficiency of FLC when combined with Multiverse optimization (MVO) for the control of 20-storey building under seismic loadings, concluding its higher efficiency than the MBC LQG controller. Furthermore, they compared this FLC-MVO controller with other optimization algorithms: dragonfly algorithm, imperialist competitive algorithm, GA, grey wolf optimizer, and PSO. They have concluded that the MVO is more effective in reducing the building responses than other Meta-heuristic Algorithms.
Mehrkian et al. 2 proposed a conceptual Multi-Objective Fuzzy-Genetic Control for vibration control of base-isolated 8-storey irregular building subjected to seismic excitations. This controller combines FLC optimized with Multiobjective GA method of Non-dominated Sorting Genetic Algorithm-II (NSGA-II). They compared the results with previously applied controllers, including COC, FLC, and GA optimized FLC controllers. Their proposed controller surpassed the previously proposed controller by effectively reducing base displacements and transmissions of vibration to the superstructure. Bathaei et al. 128 presented type-1 and type-2 FLC for vibration control of an 11-DOF building model semi-active TMD with MR damper. Their results demonstrated the higher performance of these controllers where the FLC type-2 controller presented better results than the type-1 controller. Faraji 134 proposed an FLC for vibration mitigation of single-storey building utilizing MR damper and concluded FLC performs better results. Djedoui et al. 135 presented an FLC for the vibration attenuation of 6-storey base-isolated building structure equipped with Semi-Active Tuned Mass Damper (SATM) and concluded the reduction in structural response towards seismic excitations. Zhao et al. 136 presented a self-tuning FLC for seismic protection and control of a 5-storey base-isolated building equipped with piezo-electric friction damper. They concluded that their proposed strategy improves the superstructure’s response and efficiently lessens the isolation system’s deformations. Bathaei et al. 137 presented type-1 and type-2 FLC for vibration control of steel bridge structure equipped with MR damper and determined that type-2 FLC more proficiently reduced the maximum displacement, base shear, and moment of the bridge comparison to the type-1 FLC. Zahrai et al. 132 presented two control schemes, passive MTMD, and active MTMD systems incorporated in cable-stayed bridge subjected to seismic excitations. In the AVC system, they included FLC for generating the optimal control forces of ATMD. They also incorporated GA for optimizing the parameters of ATMD. The results presented in their study significantly achieved control objectives by utilizing active MTMD systems as compared to the passive MTMD system.
Baghaei et al. 129 incorporated FLC for designing a chattering-free sliding mode controller, which was employed to lower the seismic responses of an 8-storey building equipped with an ATCS. Their results validated the performance of the FLC+SMC method compared to the conventional SMC to remove chattering with high accuracy, even as lessening the dynamic responses. Kim and Kang 138 utilized FLC capabilities to generate control forces of MR damper developed for enriching the control performance of a semi-active outrigger damping system in building structures under seismic excitations. Furthermore, they incorporated the multi-objective GA NSGA-II for optimization of the parameters of the FLC controller. Their presented results of GA optimized FLC enhanced efficiency of outrigger damping Simple Adaptive Controller(SAC) system in reducing displacement and acceleration responses of the tall buildings. Pham et al. 139 presented FLC in combination with the GA in reducing the response of ATMD equipped building subjected to earthquake excitation, where GA is designed to optimize the parameters of ATMD. Their study concluded that the FLC-GA combined control strategy outperformed the conventional control strategies and enhanced the structural response toward external loads. Hosseini et al. 39 incorporated FIS for online tuning the parameters of SAC implied for seismically excited 20-storey steel building equipped with MR damper. Their study showed higher performance of the FIS-tuned SAC method with high performance in achieving the control objective over the Simple SAC methods.
Ramezanila et al. 140 presented a comparative study of type-1 and 2 FLC schemes for seismic vibration attenuation of 11-storey building equipped with SATM system. They also incorporated GA to optimized fuzzy output MFs. For comparison, they utilized two other velocity-based and displacement-based on-off ground-hook controllers. Their proposed FLC-GA controllers outperformed these traditional controllers, where the FLC type-2 had shown excellent performance compared to the type-1 controller. Xu et al. 141 proposed an FLC optimized with NSGA-II, as a multi-objective genetic algorithm (MOGA), exploited to perform the HVC on the wind and seismically excited 33-storey based isolated building equipped with Triple Friction Pendulum Bearing (TFPB) and MR damper. For comparative analysis, they utilized the human-designed FLC scheme proposed in the study of Ref. 142. According to their proposed conclusions, their proposed control scheme can effectively attenuate both the seismic and wind-induced responses and achieve the optimal level of standards of vibration comfort.
Adaptive neuro-fuzzy inference system-based controller
Fuzzy logic can simply transform the qualitative characteristics of human decision-making into a system of accurate quantitative analysis. On the contrary, these systems lack a learning process that can behave as a guiding system during the transformation of human decision-making into the rule-based Fuzzy Inference System (FIS). This deficiency causes high computational time for adjusting its membership functions (MFs). Contrasting ANNs has a higher ability in the learning process and can automatically adjust the MFs and reduce error rates in determining the fuzzy rules. 143 This combination of NNs learning and FIS adaption capabilities overcome their deficiencies with collective benefits. 21
One of these hybrid frameworks, the most famous, is ANFIS which was proposed by Jang (1993).
143
Adaptive Neuro-Fuzzy Inference System implements TSK-FIS whose MFs parameters are automatically tuned by NNs.25,144 In the ANFIS framework, the FFNNs utilizing back-propagation supervised learning is usually applied for generating FIS parameters.
145
Where FIS brings in logical reasoning through imprecise statements. These statements are formulated based on expert’s knowledge interpreted as fuzzy rules sets. These rule sets are a collection of “if-then” statements and MFs that relate the input and the output data.25,144 The network structure of ANFIS is composed of two parts, the premise part and the consequence part.
143
The steepest descent method is used to adjust the premise parameters, and the least square estimation is used to adjust the consequent parameters.
146
The basic structure of ANFIS consists of five layers, as seen in Figure 15. Basic adaptive neuro-fuzzy inference system structure.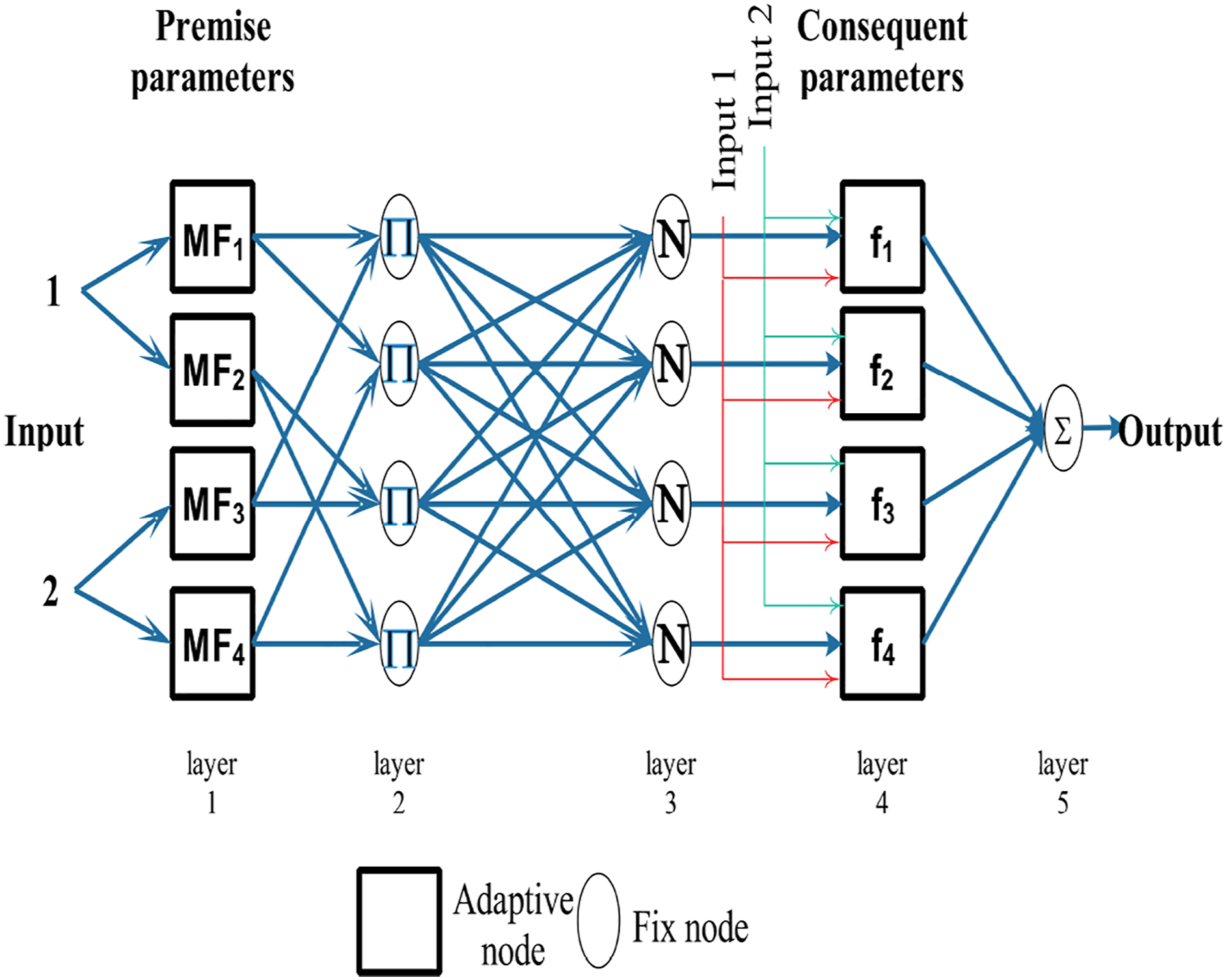
In this Figure 15, An ANFIS structure with two inputs and one output is given, consisting of four MFs and four rules. The layer structure of ANFIS is described below. Layer 1 (fuzzification layer): This layer utilizes MFs to find fuzzy clusters from input values. The parameters that determine these MF forms are called premise parameters. The output of this layer is its membership value. In simple words, this layer simply computes the accurate value for the parameter of the MFs. Layer 2 (rule layer): This rule layer determines the values of firing strengths for the rules by utilizing the values of membership calculated in the previous layer. The nodes in this layer execute fuzzy AND operations. The output of every node is produced by multiplying all inbound signals with that node. Layer 3 (normalization layer): This layer calculates the normalization values for the firing strength of each rule. Layer 4 (defuzzification layer): This layer calculates the weighted values of rules inside each node. These are so-called consequent parameters. The total numbers for each rule of consequent parameters are more than the total number of inputs. In other words, this layer gives the result rules of the FIS. Layer 5 (summation layer): This layer expresses that the actual output of ANFIS is obtained through the summation of the overall output obtained for each rule from the previous layer.
ANFIS applications
Bozorgvar and Zahrai 21 presented an ANFIS-GA controller in an SVC system equipped with MR damper and applied it to the 3-storey building under seismic excitation. The GA is utilized to optimize both the premise and consequent parameters of fuzzy functions in ANFIS. Their study concludes that the ANFIS-GA performed better than neural network predictive control (NNPC), LQG, and COC controllers. Soares et al. 25 developed two semi-active control schemes: an ANFIS controller and SAC. They have tested these adaptive control schemes on a cable-stayed bridge equipped with MR damper subjected to seismic excitations. Their study concluded with the satisfactory performance of the proposed schemes in attenuating the seismic responses. Bozorgvar and Zahrai58,10 presented two controllers, where the first controller is based on ANFIS optimized with GA and the second one is based on Fuzzy cooperative co-evolution (Fuzzy CoCo) optimized with GA. These controllers were implemented on a 9-storey building equipped with MR damper under earthquake loading. The effectiveness of these ANFIS-GA and CoCo-GA controllers were compared to other controllers named wavelet NNs, FLC-GA, LQG, and COC algorithms. The proposed controllers performed better results in reducing the overall structural response. Al-Fahdawi et al. 147 presented a comparative study of two adaptive control methods for mitigating the seismic responses of two coupled (3- and 5-storey shear-type) buildings with MR dampers. These two adaptive controllers are ANFIS and the SAC, and they performed the numerical analysis considering two cases of damaged (change in design parameters) and undamaged (no change in design parameters) structures. Their findings illustrated that both these adaptive controllers efficiently reduced the seismic responses of coupled buildings. Al-Fahdawi and Barroso 148 have recently presented a study for the seismic vibration attenuation of two three-dimensional coupled buildings (6-storey and 8-storey) connected by the frame elements equipped with MR dampers. Their study has proposed two control algorithms ANFIS and SAC for the generation of control forces for MR dampers. The behavior of structural control systems is studied for both symmetrical and asymmetrical coupled buildings under 11 pairs of main earthquakes. A comparison is made between ANFIS and SAC controllers, and the results show that both proposed controllers can effectively alleviate the seismic response of the structure and enhanced their performance under seismic activities.
AFs based controller
Adaptive Filters (AFs) are digital signal processing systems characterized as a device that maps its input signal to another output signal allowing the extraction of the required information included in the input signal. 149 This extraction is conceivable through learning from the sequence of signal samples using an online learning algorithm that updates a defined transfer function corresponding to the error signal to get the desired output.29,150 AFs play a significant role in helping dynamic systems adapt in the presence of system uncertainties and nonlinearities that cannot be known in advance. 151 AFs can be incorporated with the control algorithm for modeling, estimation, detection, error and noise reduction, and System Identification (SI). Furthermore, AFs can assist in developing a numerical model of physical systems or help in dealing with ill-defined numerical models by analyzing the actual data.29,149
The AFs operation majorly depends on the recursive (adaptive/learning) algorithm.
152
AFs generally consists of two different parts: a filter, which is designed for performing the desired processing function for estimating the uncertain parameters and noise statistics during the filtering process, and an adaptive algorithm for tuning the filter gain based on variations in parameters or noise statistics.
153
That is presented in Figure 16. Typical structure of adaptive filter.
153
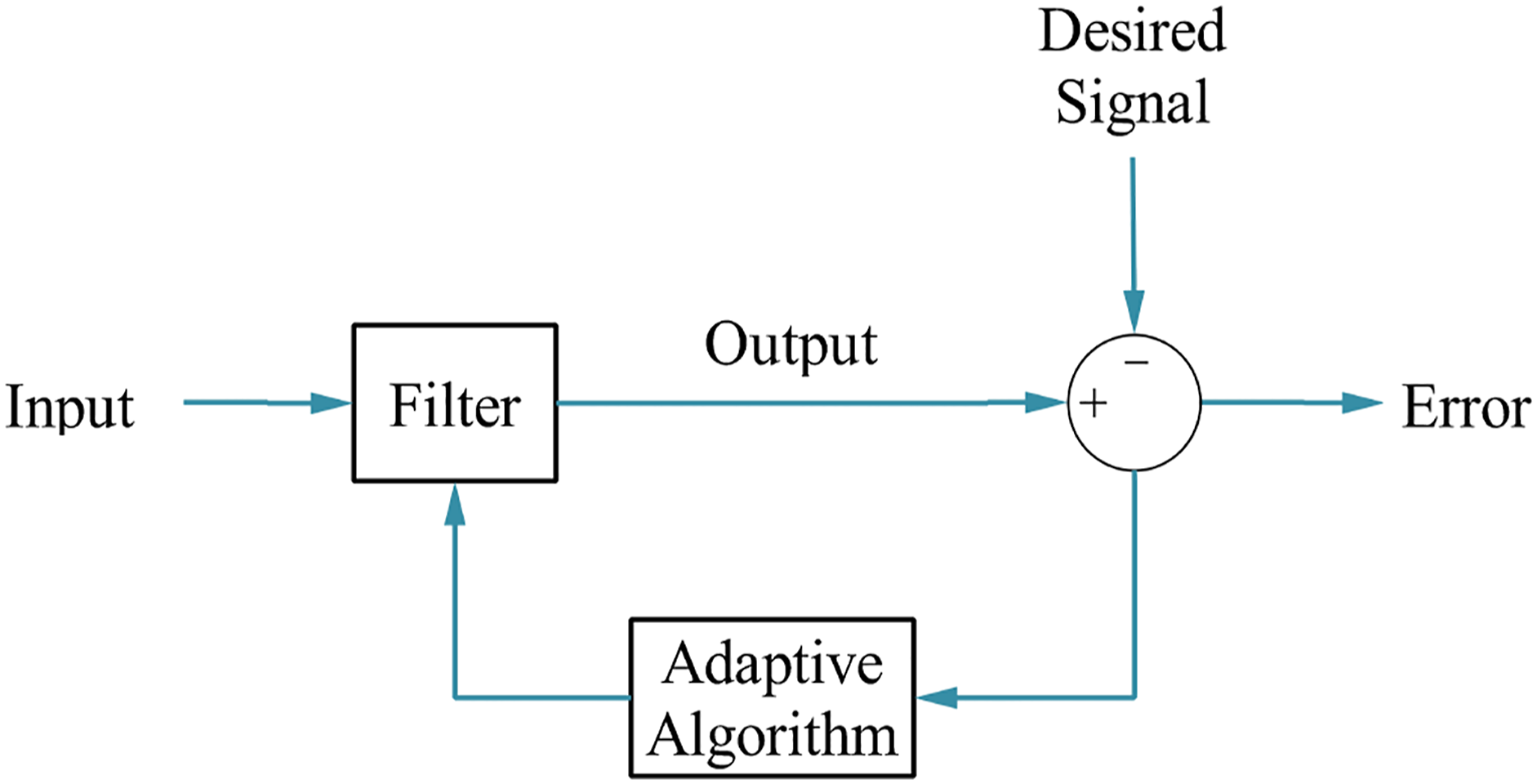
The AFs have two inputs: one is the primary input, and the other one is the reference/desired signal. The filter analyzes them for calculating error, and then this error is minimized iteratively based on some objective function.
150
The algorithm begins from initially prescribed conditions, representing absolute ignorance regarding the environment; then, it proceeds with a step-by-step manner to adjust the filter’s free parameters. In this way, the filter becomes more familiar with its environment after each step. The parameter adjustment process follows some error-correction learning and minimizes error signals in statistical terminology.151,154 An adaptive filter is a nonlinear filter because its characteristics mainly depend on the input signal and do not satisfy the homogeneity and additivity conditions. Alternatively, if we freeze the filter’s parameters at any given time instant, in this sense, most of AFs behave linearly.149,155 The reason for that, AFs can be classified in terms of linear and nonlinear AFs. An AF is characterized as linear as long as parameters are held fixed, and the input–output map follows the principle of superposition. Otherwise, it is characterized as nonlinear.
156
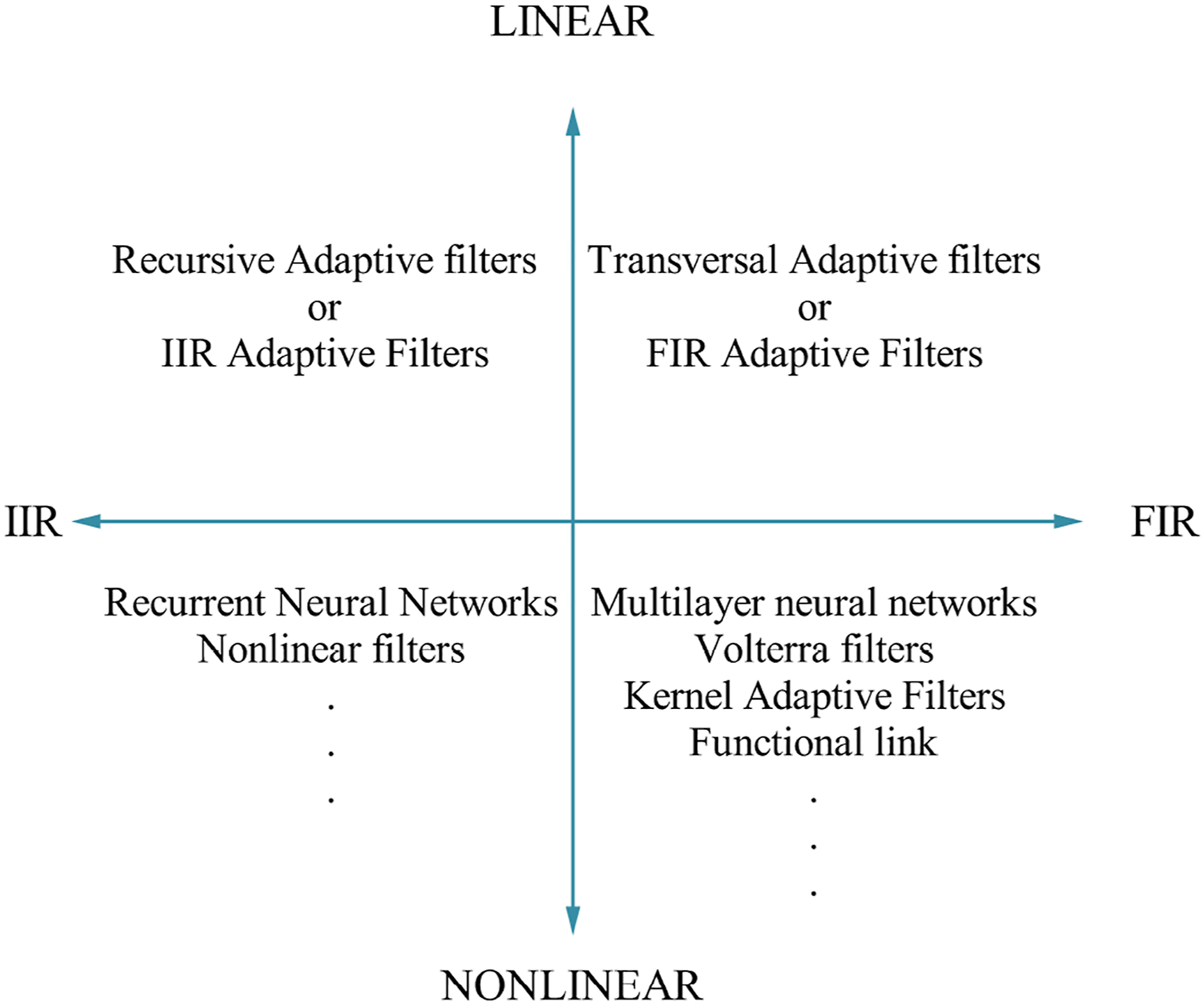
Moreover, the impulse response of AFs determines its memory. On these bases of filter’s memory, AFs can be further classified as linear or nonlinear-Finite Impulse Response (FIR) filters, or nonlinear-Infinite Impulse Response (IIR) filters as depicted in Figure 17. A linear FIR-AFs or transversal-AFs have finite memory, including a tapped-delay-line filter (i.e,. a discrete-time filter with finite-duration impulse response) operating as guided by the Least Mean Square (LMS) algorithm. The LMS algorithm is “stochastic,” providing an approximation to wiener filtering formulated according to the steepest descent method. Whereas the linear IIR-AFs have infinite memory that fades out with time, an example includes an adaptive scheme utilizing the Recursive Least Squares (RLS) algorithm, a special case of Kalman filtering theory. RLS algorithm is “exact,” affording a recursive solution to the linear filtering problem formulated according to the method of least squares.149,152,154 These filters utilization nonlinear computational elements, enabling them to utilize the complete information content of the input data. Examples of nonlinear AFs include Volterra filters, kernel, and ANNs based AFs.151,154 Classification of adaptive filters.
152
Furthermore, AFs algorithms incorporates different learning methods as supervised and unsupervised learning algorithms and others named online, block, and batch algorithms.
152
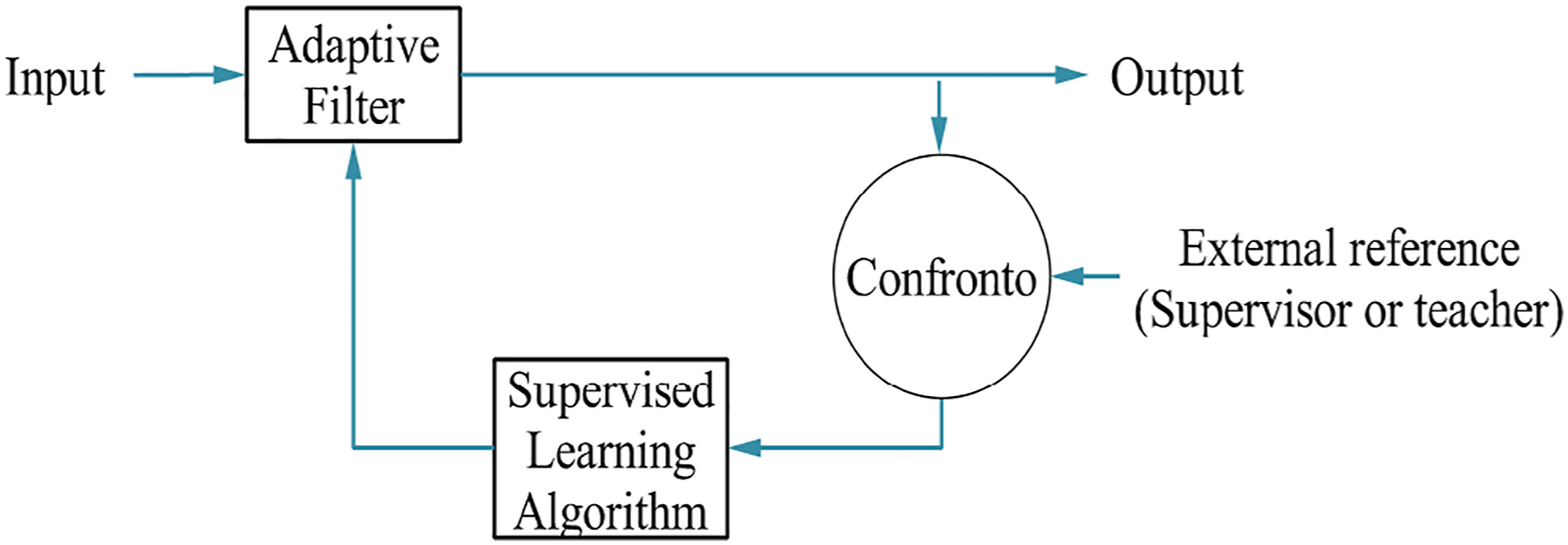
Supervised learning AFs algorithms: In this type, the filter learns according to the external reference signal that performs the task of an explicit supervisor or teacher, as shown in Figure 18. Moreover, computation of the parametric variation is a function of the input and reference signals (or of the error). Unsupervised learning AFs algorithms: In this learning type, no external reference is utilized, and learning is organized as a kind of self-driven, generally termed as unsupervised or blind learning as presented in Figure 19. Furthermore, in this type, the calculations of parametric variation are a function of input–output data without depending on the reference signal. Supervised learning adaptive filter. Unsupervised learning adaptive filter.
AFs applications
Kim and Adeli 157 combined adaptive Filtered-x Least Mean Square (FxLMS) control algorithm with LQR and LQG for vibration control of building structures utilizing ATMDs. The result showed that their proposed hybrid control algorithm outperformed the individually applied LQR/LQG and FxLMS algorithm because of its low vulnerability to modeling errors, and higher stability, and higher effectiveness.
Meta-heuristic algorithms-based hybrid AIC controllers
The structural control problem comprises of various objectives that need to be optimized; thus, different optimization methods from meta-heuristic algorithms are incorporated, helping with tuning controller parameters.139,158 The expression “optimization” concerns examining the problems requiring minimization or maximization of a function resulting in finding the best solution from all feasible solutions. Moreover, it is generally employed to those problems that need to attain a certain level of optimality concerning single or multiple objectives. The reasonable solution for attaining the optimal value of a single objective function that assembles all different objectives into one objective that why is named single objective optimization (SO). The optimization applied for more than one objective is named the multi-objective optimization (MOO) problem. These problems have a set of Pareto optimal solutions and include numerous conflicting objectives. 159 In structural control frameworks, these optimization problems are typically expressed in minimization.130,160 In general, meta-heuristics are generally easy to implement and successfully bypass areas of local minima. Specifically, they are intended to handle complex and nonlinear problems wherein deterministic and heuristic optimization methods fail to produce the required results. 130
In the current study, the meta-heuristic optimization methods frequently opted by the adaptive intelligent control methods are discussed and include Evolutionary Algorithms (EAs) and Swarm Intelligence (SI) algorithms. Evolutionary Algorithms: These algorithms are a family of non-gradient population-based, parallel search optimization algorithms, established on the philosophies of natural selection and population genetics and generally utilize four main steps, including reproduction, mutation, recombination, and selection for their working. In a broader perspective, any iterative, population-based method that applied selection and random variation to generate new solutions can be considered EAs. Moreover, the utilization of a population-based structure permits EAs to solve SOO problems and MOO problems by generating several elements of the Pareto optimal set in a single run.161,162 The most popular GA belongs to this category. Swarm Intelligence Algorithms: These algorithms are a class of nature inspired population-based meta-heuristic algorithms. The notion of SI perceives inspiration from the collaboration and synchronized behavior of participants in a society (e.g., insects, such as ants, termites, bees, wasps, and other animals) that carry out several inherent social activities to complete complex tasks.163,164 SI methods, including Particle Swarm Optimization (PSO) and Cuckoo Search (CS) algorithms, are discussed.
Genetic algorithms
Genetic Algorithms (GA) are a renowned metaheuristic population-based Evolutionary Algorithms (EA) developed by John Holland94,165 that simulates Darwin’s theory of evolution 166 based on the “survival of the fittest” principle. 167 Fundamentally, “the genetic algorithm is a highly parallel mathematical algorithm that transforms a solution set, each with an associated fitness value, into a new population using operations patterned after the Darwinian principle of reproduction and survival of the fittest and after naturally occurring genetic operations.” 168
In GAs, the potential solution to a particular problem is encoded on a finite-length string of alphabets (genes) of specific cardinality described as chromosomes. For the development of good solutions and carrying out natural selection, a clear distinction between good and bad solutions is needed in the form of a measure. This measure/fitness can be an objective function (a mathematical model) or a subjective function (based on human choice). This fitness measure also directs the algorithm to determine the relative fitness of potential solutions that will eventually evolve to good (optimal) solutions. After defining the measure (objective function), the standard GA optimization process begins by initializing an arbitrary design population (encoded in a chromosomal manner) across the search space. Next, the basic GA operations of selection, crossover, and mutation are performed on this population to produce a new population. The measure (objective function) value of each string is a potential survival indicator, called fitness or the standard used to select individuals (chromosomes). The higher the fitness value, the higher the chance of mating and reproduction of that string. After several generations, the original parental population is replaced by the population of the offspring produced by selection, crossover, and mutation, and the solution ultimately evolves to good (optimal) solutions. 169 The pseudo-code best describing GA is presented in Algorithm 1.
GA applications
Bozorgvar and Zahrai
21
presented a study in which GA optimized both the premise and consequent parameters of fuzzy functions (MFs and result functions) simultaneously in ANFIS controller. Their study concludes that the ANFIS-GA performed better than other controllers, particularly individual ANFIS controllers. Bozorgvar and Zahrai
58
utilized GA to optimize the parameters of ANFIS and Fuzzy cooperative co-evolution (Fuzzy CoCo) controller. These controllers were implemented on a 9-storey building equipped with MR damper under earthquake loading. The effectiveness of these GA optimized controllers was found better than other controllers. Mehrkian et al.
2
utilized MOGA method of NSGA-II for tuning the parameters of FLC, which was applied for vibration control of base-isolated 8-storey irregular building subjected to seismic excitations. Their GA optimized controller surpassed the previously proposed controller by effectively reducing base displacements and transmissions of vibration to the superstructure. Kim and Kang
138
incorporated the Multi-Objective GA (NSGA-II) to optimize the FLC controller’s parameters. This optimization enabled FLC to effectively generate optimal control forces of MR damper developed for enriching the control performance of a semi-active outrigger damping system in building structures under seismic excitations. Chen
1
utilized GA to optimize the parameters of FFNNs based controller, such as searching for initial weight and bias. This controller was validated on single-storey shear building structure equipped with AMD for system identification and vibration suppression. The experimental results had shown higher efficiency of the proposed controller in tracking control and vibration suppression.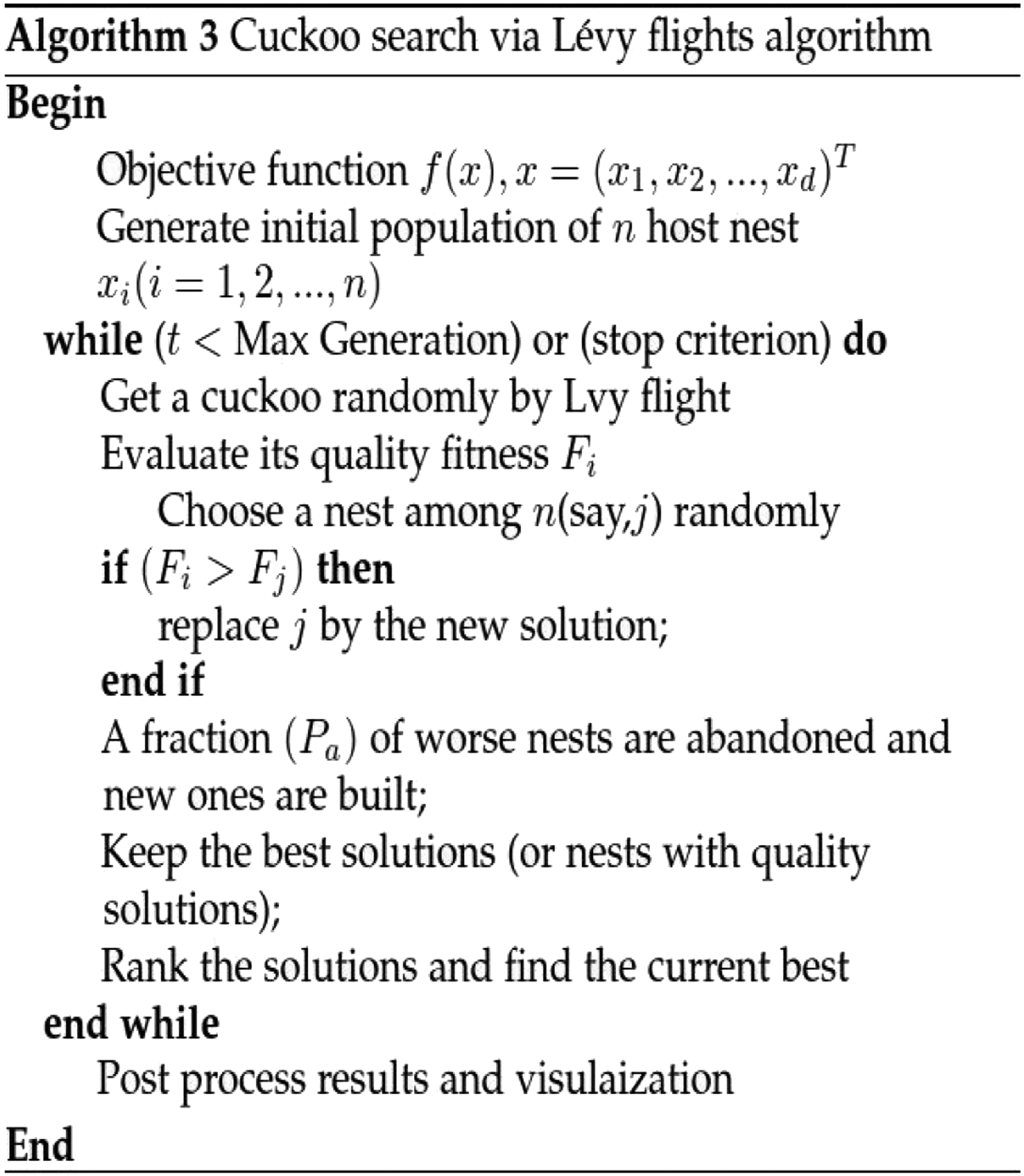
Gu et al. 78 utilized NSGA-II with Dynamic Crowding Distance (DCD) concept for optimizing fuzzy control rules along with most fitting parameters for the MFs, in RBF-NFLC for seismically excited 3-storey base-isolated shear frame building. NSGA-II enhanced the performance of the proposed controller over other conventional control schemes. Ramezanila et al. 140 incorporated GA for optimizing the parameters of type-1 and 2 FLC schemes for seismic vibration attenuation of 11-storey building equipped with SATM system. Their GA optimized controller schemes have shown higher results than other velocity-based and displacement-based on-off ground-hook controllers. Xu, Guo et al. 141 utilized NSGA-II, as a MOGA, for the purposed FLC scheme in finding the optimal fuzzy MFs for both wind and seismic response control. They utilized this hybrid scheme to perform the HVC on the wind and seismically excited 33-storey based isolated building equipped with Triple Friction Pendulum Bearing (TFPB) and MR damper. Resultantly, this optimization enhanced and enabled the FLC to effectively reducing both the seismic and wind-induced responses of the structure.
Particle swarm optimization
Particle Swarm Optimization (PSO) is a SI-based algorithm developed by Kennedy and Eberhart. 170 The PSO mimic the swarming behavior of bird’s flock/school of fish.
The PSO theory is generally based on the movement of organisms, for example, in a bird flock or a school of fish. When they travel to a specific destination, every individual (particle) delivers significant consideration to a specific direction to fly. Afterward, the whole flock of individuals communicates with one another to find the individual with the best direction and speed (velocity). Then, they begin to research all possible flying directions relating to their new location. This selection process keeps going until the flock reaches its destination.159,171 Then, each particle recalls its previously bettervisited solution and chooses the most suitable global solution in each generation.
171
The pseudo-code best depicting the process of PSO can be seen in Algorithm 2. Trend analysis of entire compiled literature.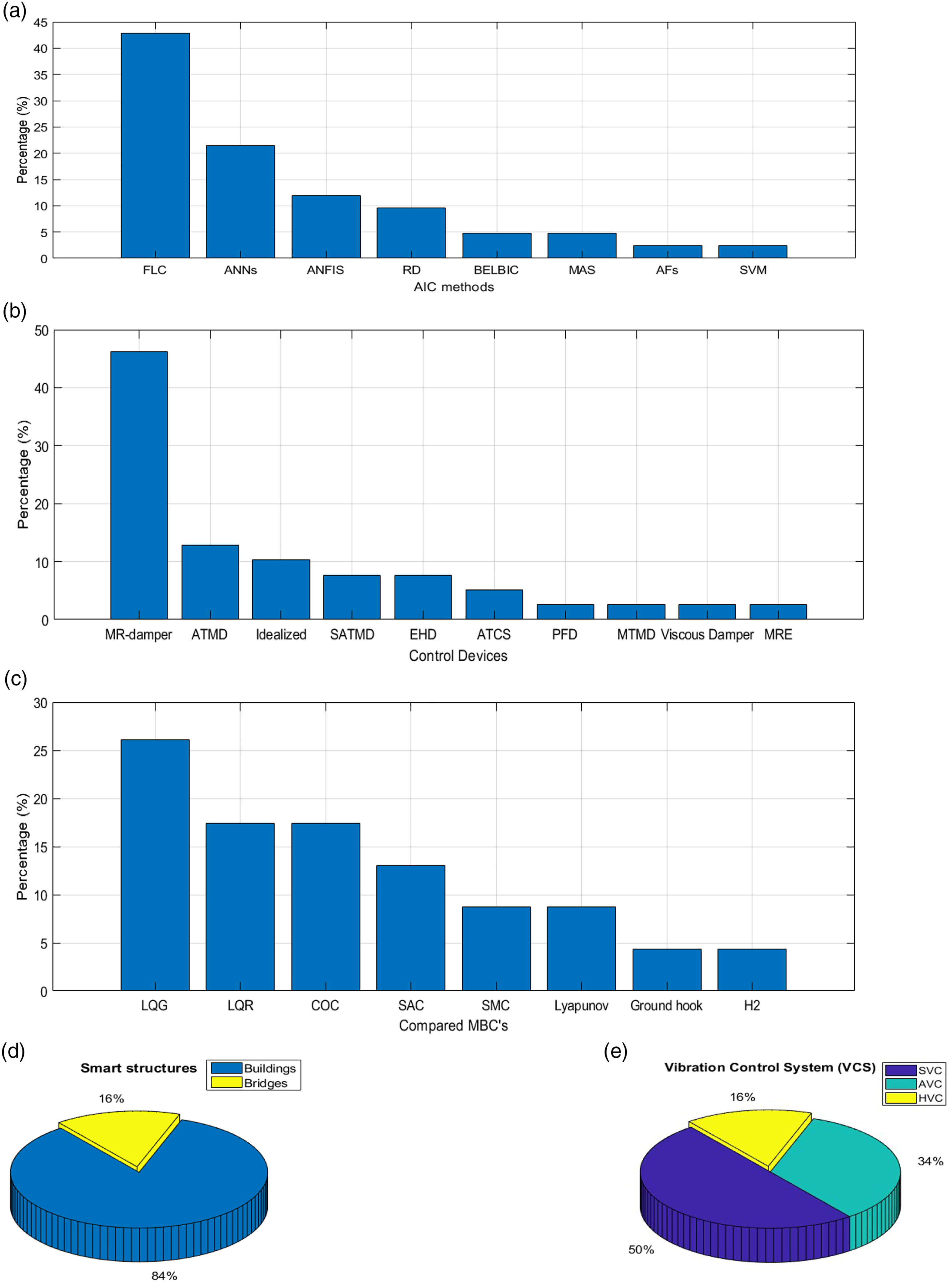
PSO applications
Braz César et al. 83 incorporated PSO for tuning the parameters of a BELBIC utilized for the seismic vibration control of 3-storey building structure equipped with MR damper. The simulation results present the high efficiency of proposed schemes in reducing the overall structural response. Notably, the PSO tuning enhanced the controller’s efficiency by almost 20%, far better than the traditional empirically tune controller. Braz César et al. 82 developed PSO optimized BELBIC for the single-storey building structure subjected to seismic loading, and the actuating mechanism is supported by MR damper. In addition, their proposed PSO optimized controller has shown higher performance in achieving control objectives.
CS algorithm
Cuckoo search was introduced by Yang and Deb in 2009.
172
It is another SI-based algorithm based on the brood parasitism of some cuckoo species. Also, CS is enriched through engaging Lévy flights.
173
The CS algorithm follows three basic principles for its implementation as presented as follows: Each cuckoo lays one egg at a time and leaves it in an arbitrarily selected nest of its host bird, The eggs and nests are coded as solutions, and the best solution (best nests with high-quality eggs) will pass on to the next generations, The number of available host nests is fixed, and when the cuckoo laid their eggs in those host nests, these eggs have a probability of being discovered by the host bird. Therefore, each host bird can either eliminate that egg or abandon his nest to build a new nest.
Furthermore, the Lévy flights help generate new solutions to explore the search space more efficiently than simple random walks. The Lévy flight carries out infinite mean and variance. Hence, it can explore the search space more effectively than a standard Gaussian process. Likewise, CS offers widespread moves to a global search; in this manner, new moves can cover progressively wide-ranging regions.174-176 The pseudo-code best exemplified CS algorithm is presented in Algorithm 3. Trend analysis of individual adaptive intelligent control compiled literature.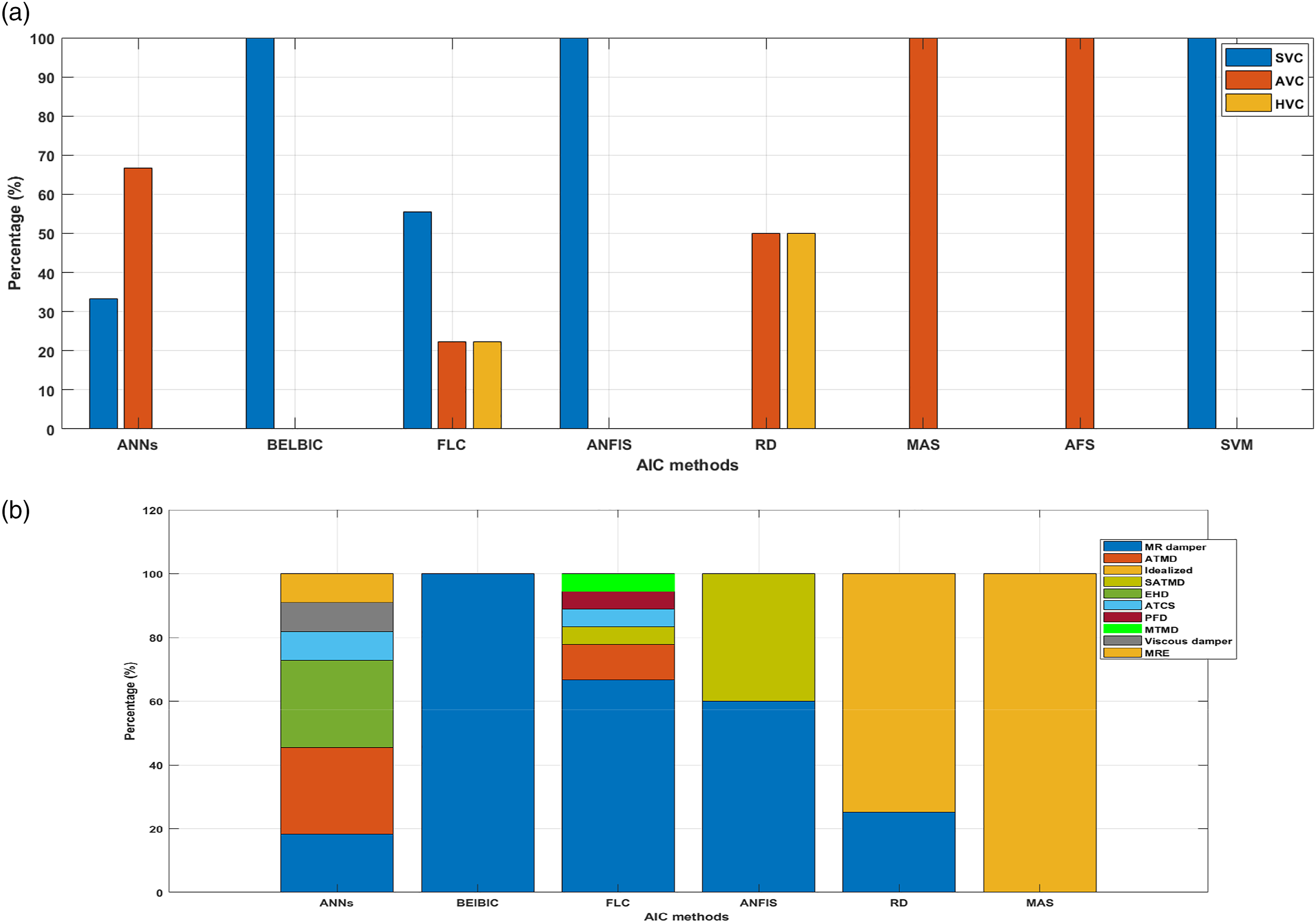
CS applications
For FLC based controllers, Zabihi-Samani et al. 131 introduced a cuckoo search wavelet-based fuzzy logic controller (ACSWBFLC) in which CS is incorporated to optimize the placement and the number of MR dampers and sensors and calculated the optimal control forces for each time interval. Also, a multiobjective CS algorithm was incorporated by Zamani et al. 133 with their two proposed control strategies named multi-objective modified clipped optimal (MOMCO) and AFOFPID controller. Their algorithm is mainly used for tuning the input–output MFs, inference rules, scaling factors, the order of the integral and derivative operator in a FOFPID controller, and finding the optimal weighting matrices of the MOMCO controller. In addition, they have concluded that the adaptive fractional order fuzzy PID controller performs better in reducing the deformation of isolation system and superstructure accelerations under seismic excitations.
Summary and trend analysis of reviewed articles
Summary of cited literature
Summary of articles employing AIC for smart building and bridge structures.
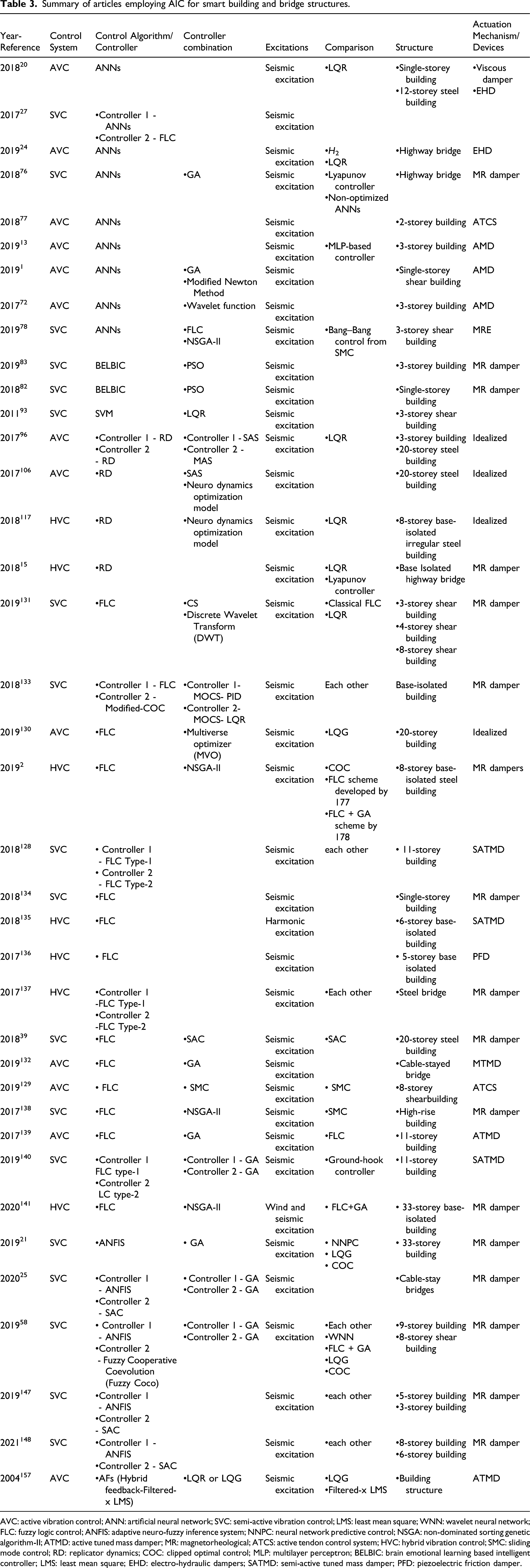
AVC: active vibration control; ANN: artificial neural network; SVC: semi-active vibration control; LMS: least mean square; WNN: wavelet neural network; FLC: fuzzy logic control; ANFIS: adaptive neuro-fuzzy inference system; NNPC: neural network predictive control; NSGA: non-dominated sorting genetic algorithm-II; ATMD: active tuned mass damper; MR: magnetorheological; ATCS: active tendon control system; HVC: hybrid vibration control; SMC: sliding mode control; RD: replicator dynamics; COC: clipped optimal control; MLP: multilayer perceptron; BELBIC: brain emotional learning based intelligent controller; LMS: least mean square; EHD: electro-hydraulic dampers; SATMD: semi-active tuned mass damper; PFD: piezoelectric friction damper.
Trend analysis
Overall analysis
The graphical information of the complete works included in the current study is presented in Figure 20 where Figure 20(a) presents the overall application percentage of each AIC method incorporated. This study shows that FLC and ANNs based AIC methods have quite a higher number of cited studies. On the other hand, the MR damper and ATMD are the most preferred by the research community, as depicted in Figure 20(b) additionally, most of the studies included in this study found to be applied on the smart building structures, and their applications on bridge structures are comparatively less as presented in Figure 20(d), and most of these studies adopted SVC systems as compared to AVC and HVC systems as depicted in Figure 20(e). For the comparison of these AIC methods, most of the included studies mainly exploited MBC algorithms. Among these algorithms, the LQG, LQR, and COC methods are mainly utilized, as presented in Figure 20(c), and among those studies that incorporated meta-heuristic algorithms for optimizing the AIC parameters, GA is mostly utilized algorithm. 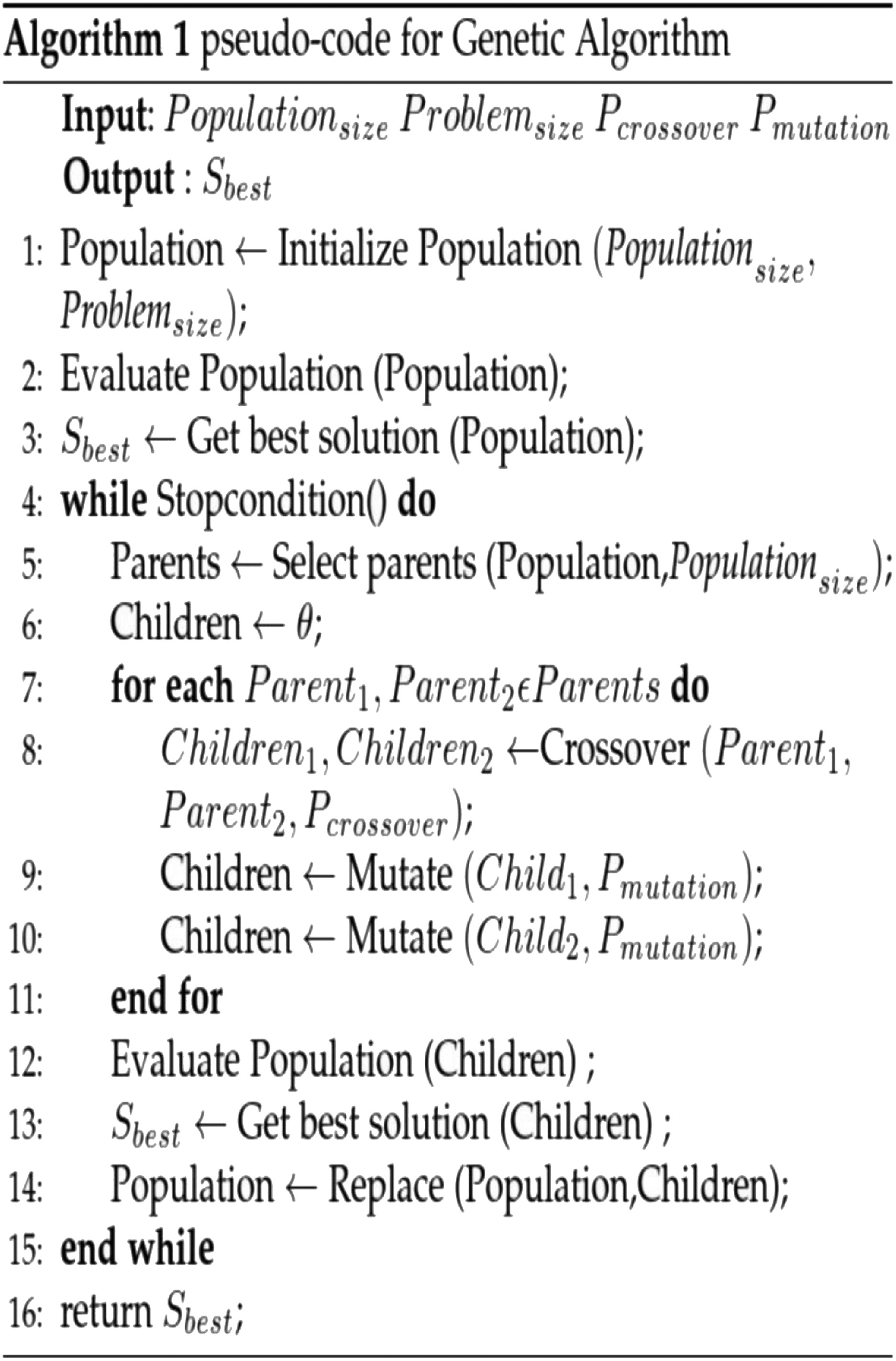
Analysis of individual AIC algorithms
The individual analysis of cited AIC methods is presented in Figure 21. The individual AIC methods incorporated in the different vibration control systems can be seen in Figure 21(a), in which the ANNs based controllers are primarily utilized in AVC system, BELBIC in SVC, FLC in SVC, ANFIS in SVC, RD both in SVC and HVC, MAS in AVC, AFs in AVC, and finally the SVM is incorporated in SVC control systems. Moreover, each AIC methods cited in this study is also presented concerning their incorporated control devices in Figure 21(b), in which the ANNs based controllers were largely utilized for calculating the control forces of hydraulic and ATMD control devices, BELBIC and FLC for MR dampers, ANFIS both for MR and SATMDs, and finally, the RD and MAS controllers usually calculated active control forces through the idealized control device. This term idealized represents unspecified or assumed to be ideal (i.e., the dynamics of the actuators are neglected) control devices.179,180 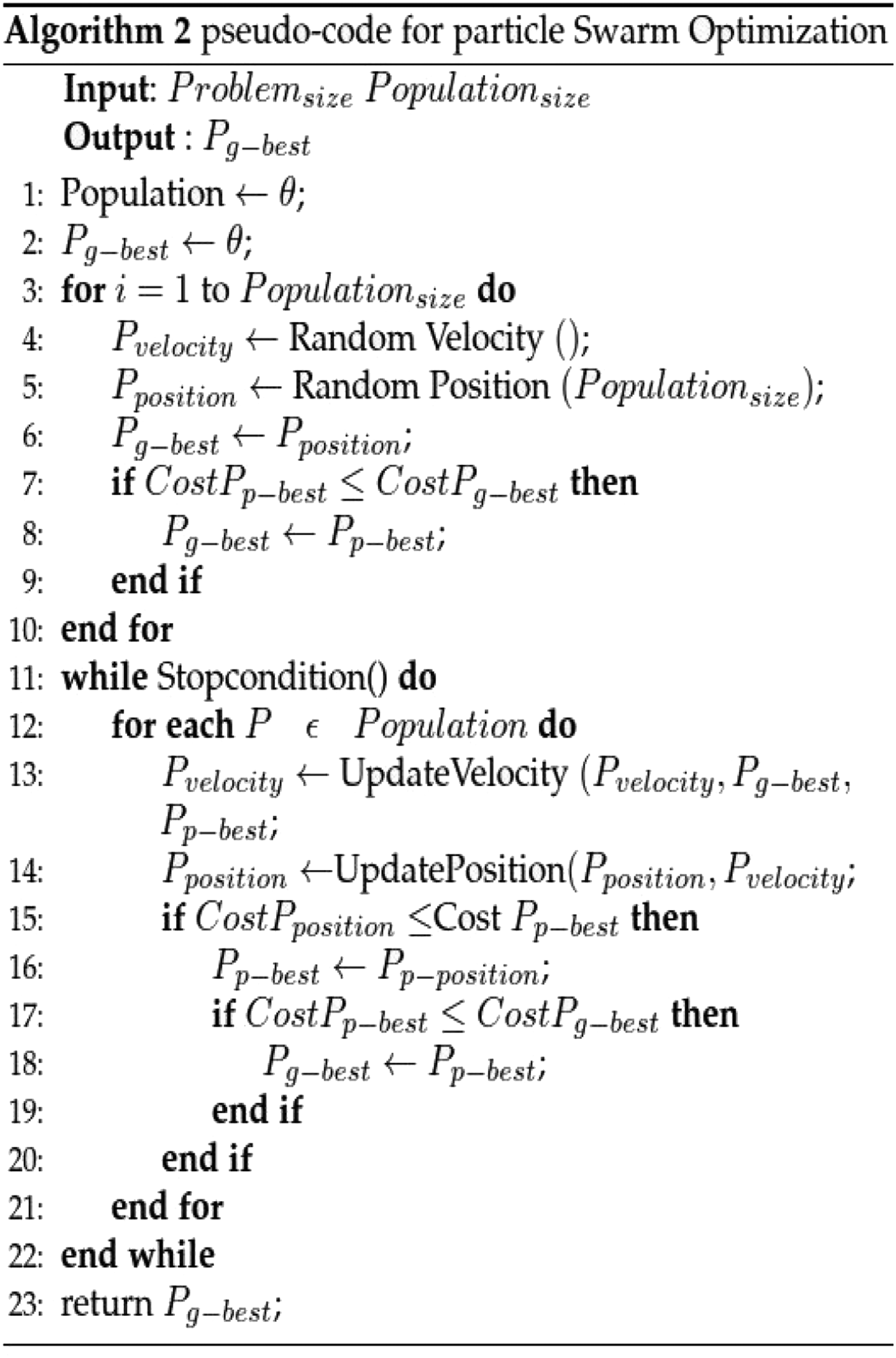
Conclusion
The work presented in this article is the first of its kind that emphasized control algorithms than control devices. Furthermore, an intense emphasis on the highlighted significance of AIC algorithms over conventional fixed linear or nonlinear MBC algorithms is contributed. Also, a brief introduction to the AI and CI methods and their relation with these emerging control algorithms is provided. The research in this field is still growing with emerging strategies applied on different old and new control devices. The priority is given to the current developments in AIC Algorithms, which show its significant improvements and increasing trend in the vibration control of smart civil structures under both the earthquake and wind excitations. These developments mainly encompass ANNs, BELBIC, SVM, MAS, RD, Fuzzy Logic, ANFIS, AFs based AIC control algorithms. Some of them were applied individually, and some were offered as hybrid control algorithms, with other control algorithms or with meta-heuristic optimization algorithms. These hybrid meta-heuristic algorithms majorly incorporated GA, PSO, and CS algorithms.
A appreciable number of studies have been found on AIC algorithms and cited with their basic theory and applications in controlling smart civil structures. These AIC algorithms are an emerging alternative to the traditional MBC algorithms and in this study justified through brief trend analysis of cited literature. That illustrates the effectiveness of AIC over the frequently utilized LQG, LQR, and COC controllers. Among these AIC controllers, FLC and ANNs were the most preferred among the research community, with quite a compelling number of applications on ANFIS and RD controllers being found, whereas AFs and SVM had contributed the minimum knowledge. Furthermore, most of the studies developed for AIC vibration control strategies were found on building structures, while the bridge structures have comparatively less. Moreover, these studies showed an extraordinary application of these techniques for generating control forces of MR damping devices, frequently included in semiactive vibration control systems. Likewise, most of the studies were established for the seismic vibration attenuation of smart structures. Lastly, this article aimed to provide a remarkable compilation of significant research in AIC algorithms designed for smart civil structures. Also, this article will impart indepth knowledge among the researchers to initiating research in the area of AIC of smart civil structures.
Future directions
Despite the amount of work representing AIC, this field still requires a period to be fully mature in producing highly intelligent, adaptive, and sustainable control systems for smart civil structures. Therefore, to assist in developing next-generation smart civil structures, this study presents the following directions. Artificial Neural Networks based controller can be updated utilizing different types of ANNs controller architectures
181
or network topologies182,183,184 like Radial bases ANNs, Hope-field Network, Learning quantization networks, and Kohonen self-organizing maps. Furthermore, the possibility of applying different deep learning ANNs185,186 algorithms like Convolutional neural networks, long-short term memory networks, stacked autoencoders, deep Boltzmann machine, and deep belief networks may be included for enhancing AIC methods performance. The emerging intelligent techniques, like deep learning,187,188 deep reinforcement learning,
189
along with data mining techniques, may be incorporated into the control for complex structures. For example, deep neural net-works186,190 can be applied to process massive amounts of unsupervised data in complex scenarios, neural networks can help reduce the data dimensionality, and the optimization of ANNs training may be employed to enhance the learning and adaptation performance of AIC controllers. A large portion of the investigations was validated by simulations or for small-scale structural systems, and the experimental examinations did to date have been seriously limited in size and scope. Further experimental verification must be considered; more laboratory tests need to be performed utilizing larger multi-degree-of-freedom structural models with several adaptive intelligent control algorithms. These tests should be trailed by full-scale testing either in the lab or in the field. The structural control is regularly acknowledged by a centralized control framework with a higher likelihood of being malfunctioned during extreme events, eventually bringing the absolute collapse of the control system. Although the decentralized framework is a decent answer for this issue, the applicability of adaptive intelligent control must be investigated to develop smart decentralized, secure control frameworks. The optimal placement of the control devices is not considered in most of the studies reviewed. Therefore, an inclusive investigation of adaptive intelligent vibration control with optimized location of sensors and actuators inside the structure might be incorporated for existing and new studies to ensure better energy dissipation with highly adaptive and effective control. The utilization of agents and a decentralized approach enhances the robustness of the entire VCS. So, the development of different MAS based AIC
191
essentially be included for the vibration control of civil structures. The utilization of MAS is developing progressively, the present MAS techniques learn from operator interactions, and efforts must be given towards diverse learning99,192,193 of MAS that do not require any interaction or feedback from the user. Time delay in the control schemes is not considered in a large portion of the cited studies, which is critical in the stability of the closedloop system. Furthermore, actuator saturation has never been discussed, which is increasingly significant during practical implementations. Therefore, these aspects must be considered in scheming AIC methods. From the literature review, it is clear that it is unquestionably required to combine different AIC techniques in framing hybrid controllers to overcome their inherent inadequacies. Likewise, most of the individually utilized AIC techniques cannot have all the necessary qualities for control and optimization. Therefore, these AIC methods can be a counterpart of developing an improved, highly intelligent, and adaptive optimized control system. In most cases, hybrid techniques, for example, ANNs-GA, FLC-GA, RD-MAS, or ANN-FLC, have provided better results. So, for the sustainable AIC algorithms design having improved execution with minimized energy utilization that can be acknowledged by other SOO and MOO algorithms like simulated annealing (SA),
194
Differential Evolution,
195
tabu search,
196
Ant Colony Optimization ,
197
fire fly algorithm,
198
Gravitational Search Algorithm
199
, Gray Wolf Optimization,
200
and other evolutionary algorithms.162,201 It is difficult to conclude which of these methods is appropriate for a specific problem. Still, requiring future studies that may fill in as a manual for selection of AIC for various applications, for example, studies comparing AIC algorithms for test problems and afterward suggesting a most appropriate method for that particular problem, additionally to give test functions for the evaluation of the characteristics of different optimization algorithms. The applications of nonlinear AFs202,203 mainly based on multilayer neural networks and recurrent neural networks154,203 can be further studied for developing new AIC schemes for vibration control of smart structures. The support vector machine application can be further studied, and their possible combinations can also be formulated with other intelligent204-206 or with model-based linear and nonlinear controllers for vibration control of civil structures.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research,
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This study has been supported by the Guangzhou University.