
Abstract
In this article, the stochastic Hirota–Maccari system forced in the Itô sense by multiplicative noise is considered. We just use the He’s semi-inverse method, sine–cosine method, and Riccati–Bernoulli sub-ODE method to get new stochastic solutions which are hyperbolic, trigonometric, and rational. The major benefit of these three approaches is that they can be used to solve similar models. Furthermore, we plot 3D surfaces of analytical solutions obtained in this article by using MATLAB to illustrate the effect of multiplicative noise on the exact solution of the Hirota–Maccari method.
Keywords
Introduction
Nonlinear partial differential equations (NLPDEs) are used extensively in the modeling of physiology, fluid mechanics, physiology, chemistry, physical phenomena, etc. The analytical solutions of nonlinear differential equations which describe mathematical models are not easy to obtain. For NLPDEs, there are many appropriate numerical and analytical methods in the literature, developed by authors such as the exp(−ϕ(ς))-expansion method,
1
the Jacobi elliptic function method,
2
the variational iteration method,3,4 the
Deterministic models of differential equations were widely used before the 1950s to explain the system’s dynamics in applications. Nevertheless, it is clear that the events that exist in the world today are generally not deterministic in nature. Therefore, random influences have been important when modeling various physical phenomena occurring in environmental sciences, meteorology, biology, engineering, oceanography, physics, and so on. Equations that include noise or fluctuations are called stochastic differential equations.
Obtaining exact solutions for a stochastic NLPDEs is one of the most essential parts of nonlinear science. For obtaining exact stochastic solutions, there are many papers such as Refs. 29–34, and the references therein.
In this article, the following stochastic Hirota–Maccari system (HMs) with multiplicative noise is considered in the Itô sense


The HMs (1–2), which was recently obtained by Maccari, 35 has been shown to be integrable in the sense of Lax. Moreover, it was suggested in Ref. 35 that this system would pass the Painleve test. The authors described the modulation stability of the HMs, which implies that this system is stable under small perturbation.
In the deterministic case, that is, without noise (σ = 0), many authors have studied a number of approaches to get the exact solutions of the H–M system (1–2) such as Hirota bilinear method,
36
Painleve test,
37
Painleve approach,
38
Weierstrass elliptic function expansion method,
39
complex hyperbolic function method,
40
the sech–csch method, sec–tan ansatz method, the rational sinh–cosh ansatz method and the tanh–coth method,
41
the improved
The main objective of this article is to get the exact solutions of stochastic Hirota–Maccari system (1–2) forced by multiplicative noise in the Itô sense by using three different methods as the He’s semi-inverse method, sine–cosine method, and Riccati–Bernoulli sub-ODE method. In addition, we investigate the influence of multiplicative noise on the exact solution of stochastic HMs (1–2) by introducing some graphical representations using the MATLAB package. This article is, to the best of our knowledge, the first to obtain the exact solution for stochastic HMs (1–2) forced by multiplicative noise in the Itô sense.
The rest of this article is described as follows. In the next section which is Traveling wave eq. for stochastic HMs, the traveling wave equation for the stochastic HMs is obtained (1–2). While in The exact solutions of stochastic HMs section, the exact stochastic solutions of the stochastic HMs (1–2) are obtained by using three different methods as He’s semi-inverse method, the sine–cosine method, and Riccati–Bernoulli sub-ODE method. In The impact of noise on the solutions of HMs section, the influence of multiplicative noise on the exact solution of HMs (1–2) is studied. Finally, the conclusions of this article are given.
Traveling wave eq. for stochastic HMs
To obtain the traveling wave equation of the HMs (1–2), let us use the next wave transformation




Integrating equation (6) once with respect to ς to obtain


Substituting equation (8) into (5), we have the following traveling wave equation


We note that when Θ2 is negative, then equation (9) adopts a periodic solution (see for instance Refs. 44,45).
The exact solutions of stochastic HMs
In this section, we implement three different methods as He’s semi-inverse method, sin–cosine method, and Riccati–Bernoulli sub-ODE method, respectively, to obtain the solutions of equation (9). After then, we have the stochastic exact solution of the HMs (1–2).
He’s semi-inverse method
The first method we are using to seek the exact solution of the HMs (1–2) is He’s semi-inverse method. The following variational formulation can be constructed from equation (9) by using He’s semi-inverse method mentioned in Refs. 46–48 as

We suppose the solitary wave solution of equation (9) according to Ref. 49 takes the form

Differentiating J with respect to K and putting

We get by solving equation (13)

Hence, the solution of equation (9) is

Now, the exact solution of the HMs (1–2) is


Analogously, we can take the solution in the following form

Sine–Cosine method
In this subsection, we use the sine–cosine method to get the solitary wave solutions of equation (9) and consequently the exact solution of the HMs (1–2). According to Refs. 14–16, let the solution u of equation (9) take the form


Substituting equation (16) into (9), we have

Rewriting the above equation

Balancing the term of Y in equation (18), we get

Substituting equation (19) into (18)

Equating each coefficient of Y−1 and Y−3 to zero, we obtain


By solving these equations, we get

Using equation (10), we have

There are two cases depend on Θ2:
First case: If Θ2 > 0, then the solitary wave solution takes the form

In this case, the exact solution of the stochastic HMs (1–2) takes the form




Second case: If Θ2 < 0, then the solitary wave solution takes the form

In this case, the exact solution of the stochastic HMs (1–2) is




If we put σ = 0 in equations (25)–(32), we obtain the same solutions (see, equations (106), (108), (111), and (113)) stated in Ref. 41.
Riccati–Bernoulli sub-ODE method
Here, we take the following Riccati–Bernoulli equation (9)

Differentiating equation (33) once with respect to ς, we obtain


Substituting (34) into (9), we have

Putting each coefficient of u
i
(i = 0, 1, 2, 3) equal zero yields system of algebraic equations. We obtain by solving these equations



First case: If


In this case, the exact solution of the stochastic HMs (1–2) is




Second case: If

In this case, the exact solution of the stochastic HMs (1–2) is


Third case: If

In this case, the exact solution of the stochastic HMs (1–2) is


If we put σ = 0 in equations (38)–(45), we obtain the same solutions (see, equations (93), (95), (100), and (102)) stated in Ref. 41.
We can apply different methods such as the Hirota bilinear method, the Painleve test, the Painleve approach, Weierstrass elliptic function expansion method, the complex hyperbolic function method, the extended trial equation method, the extended tanh method, the improved
The impact of noise on the solutions of HMs
In this section, we show the effect of multiplicative noise on the exact solution of the HMs (1–2). In the following section, we provide some graphical representations to illustrate the behavior of these solutions. We use the MATLAB package to simulate the solution (42) for various σ (noise strength) and for fixed parameters a1 = 0.9, a2 = 0, a3 = 1.4, b1 = −1.7, b2 = 0 and b3 = 3.06 as follows:
In Figure 1, we see that the solution of the HMs (1–2) fluctuates and has a pattern if the noise intensity σ = 0: The solution in equation (42) with σ = 0.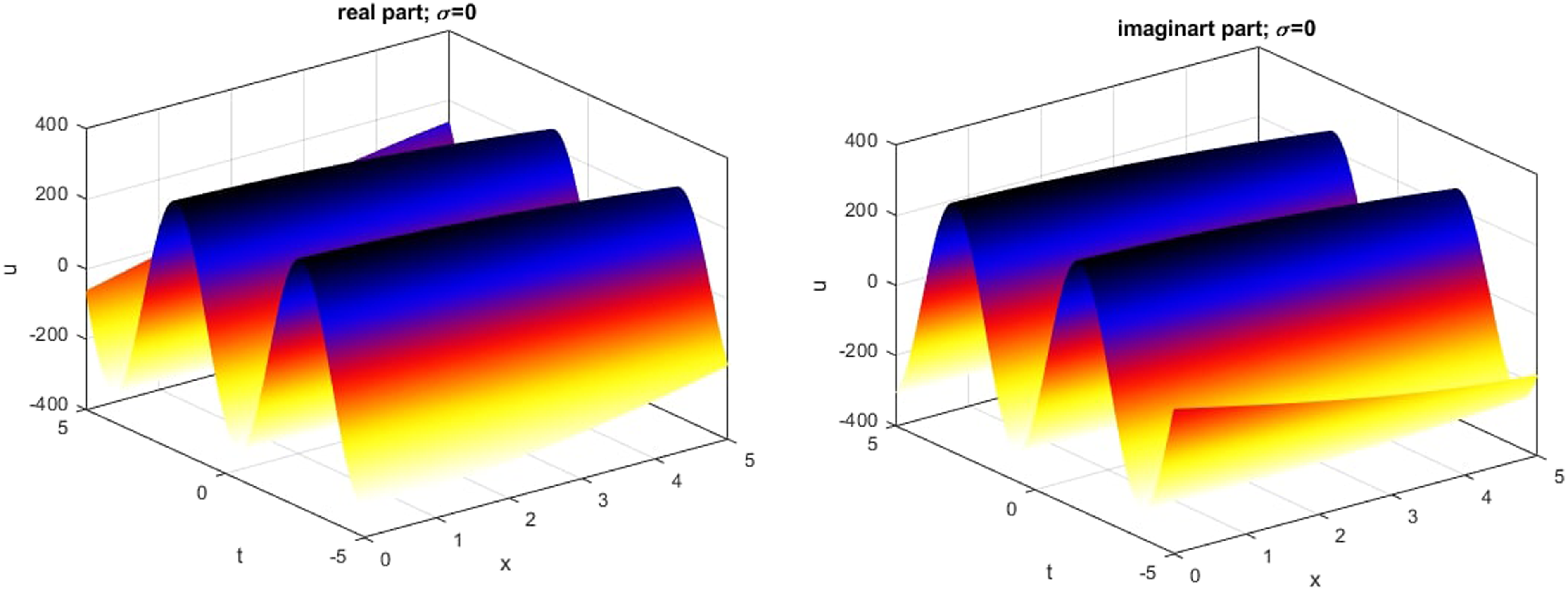
In Figures 2–4, we see that the pattern begins to destroy if the noise intensity σ increases. The solution in equation (42) with σ = 1. The solution in equation (42) with σ = 3. The solution in equation (42) with σ = 5.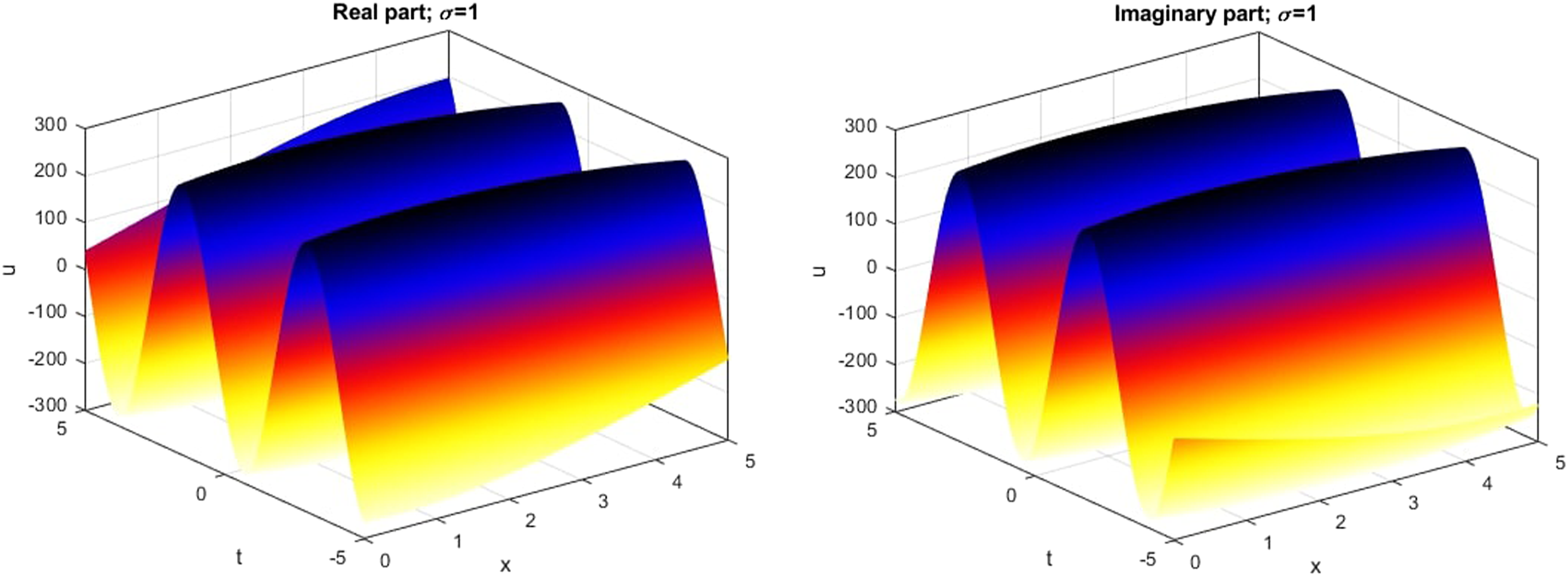
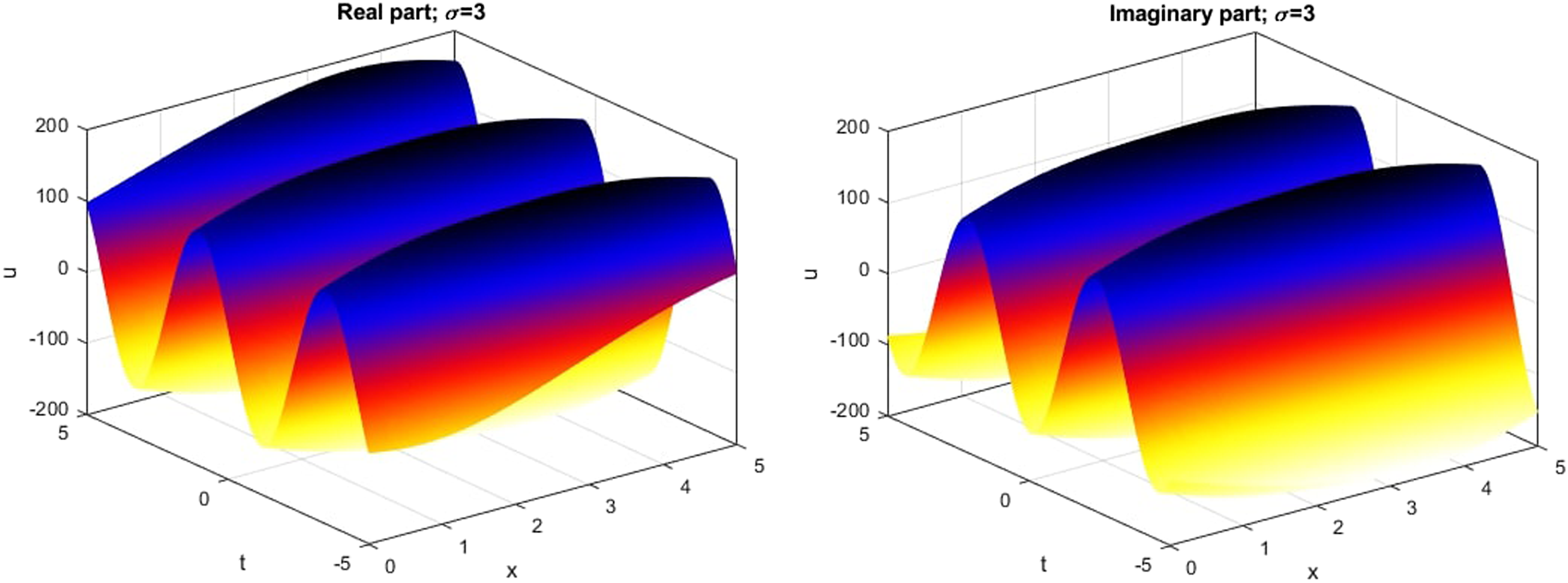
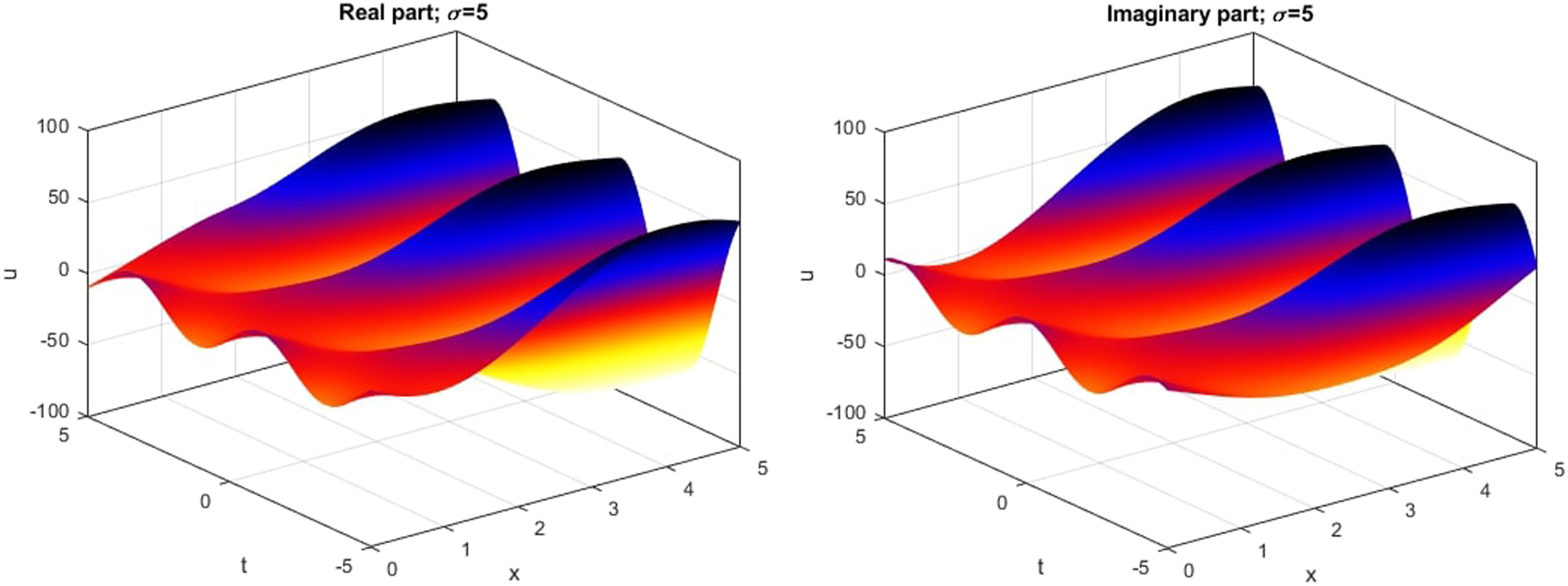
We see that when σ = 0, then the solution u takes the value between −400 and 400 as depicted in Figure 1. Moreover, we see that the values of the solution u begin to decrease and go to zero when the noise increases as seen in Figures 1–4. Also, we note that the blue and yellow color in the pattern indicates the maximum and minimum amplitude of the solution of the given system (1–2).
Figure 5 illustrates the 2D graph corresponding to the solution (42) for σ = 0, 1, 3, 5. The picture profile of solution in equation (42).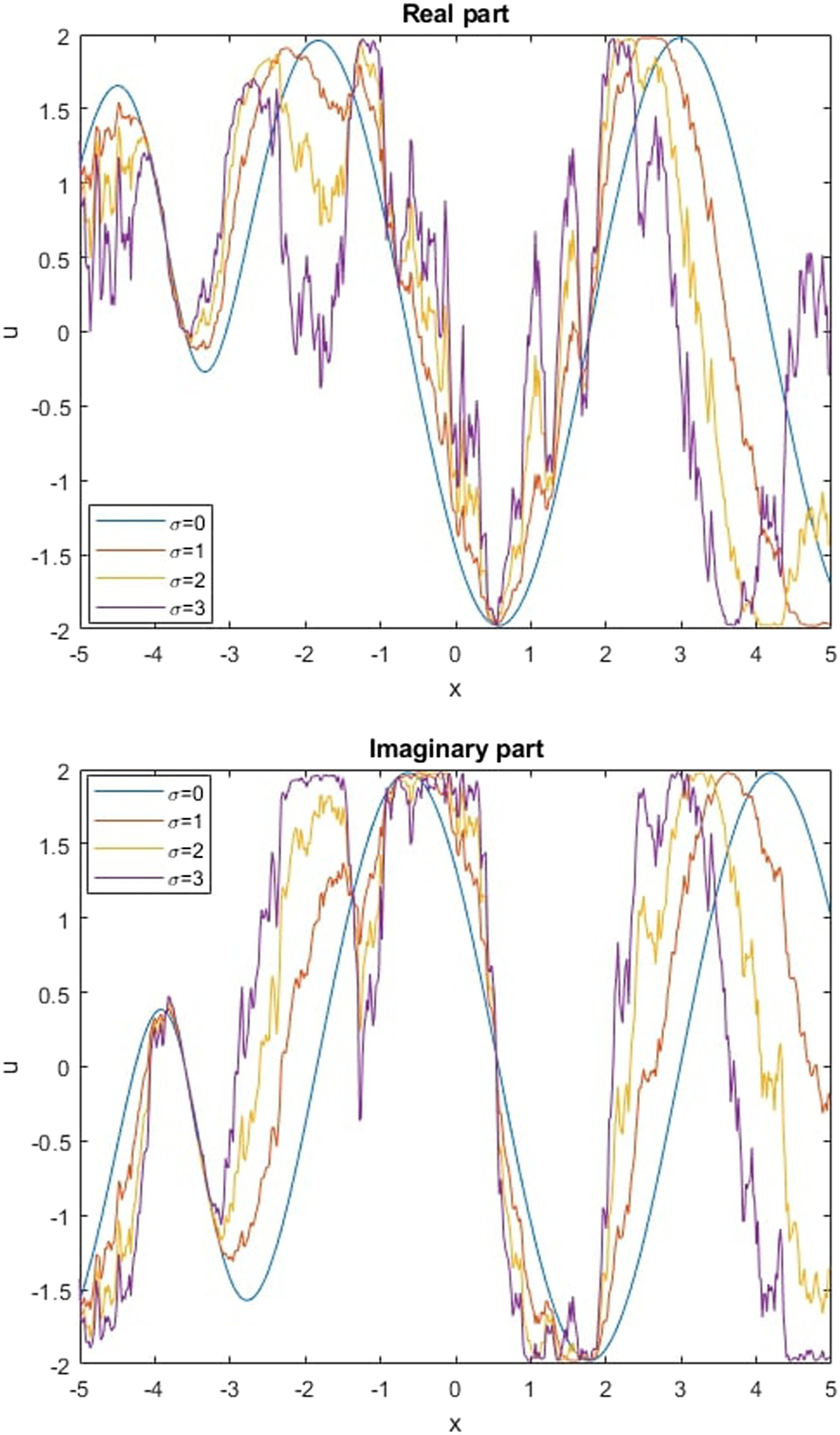
Conclusions
In this article, we obtained various solutions of stochastic exact solution for the stochastic Hirota–Maccari system (1–2) forced in the Itô sense by multiplicative noise. We used three different methods as He’s semi-inverse method, sin–cosine method, and Riccati–Bernoulli sub-ODE method to obtain exact solutions of the stochastic Hirota–Maccari system (1–2). By applying these methods, we extended and improved some results such as the results stated in Ref. 41. Finally, we studied the impact of multiplicative noise on the exact solutions of the Hirota–Maccari system (1–2) by using MATLAB package and we noted that the multiplicative noise in the Itô sense effects on the solutions of the Hirota–Maccari system and it makes the solutions stable around zero.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research has been funded by Scientific Research Deanship at University of Ha’il – Saudi Arabia through project number RG-191207.