
Abstract
The success of the unscented Kalman filter can be jeopardized if the required initial parameters are not identified carefully. These parameters include the initial guesses and the levels of uncertainty in the target parameters and the process and measurement noise parameters. While a set of appropriate initial target parameters give the unscented Kalman filter a head start, the uncertainty levels and noise parameters set the rate of convergence in the process. Therefore, due to the coupling effect of these parameters, an inclusive approach is desired to maintain the chance of convergence for expensive experimental tests. In this paper, a framework is proposed that, via a virtual emulation prior to the experiment, determines a set of initial conditions to ensure a successful application of the online parameter identification. A Bayesian optimization method is proposed, which considers the level of confidence in the initial guesses for the target parameters to suggest the appropriate noise covariance matrices. The methodology is validated on a five-story shear frame tested on a shake table. The results indicate that, indeed, a trade-off can be made between the robustness of the online updating and the final parameter accuracy.
Keywords
Introduction
Model updating techniques are widely used in structural health monitoring applications such as damage detection, 1 force identification, 2 response prediction, 3 and structural control of the existing structures. 4 Dynamic model updating calibrates numerical models to improve the simulation accuracy of the structural responses under certain loads. The calibration is achieved through the system identification of the structure under study. Although linear system identification methods have been studied and successfully applied to various structures, 5 due to the nonlinearities in real-world structures, the range of applicability is limited for these methods. Kalman filter is a member of the Bayes filter family, which is frequently used for state estimation of linear models and Gaussian distributed parameters. However, for nonlinear systems, to avoid obtaining non-Gaussian distributions for the transformed parameters of the state vector, either a linearization technique or a non-parametric method should be adopted.
Various nonlinear system identification techniques have been suggested in the literature, such as the least square estimation,
6
The UKF, on the other hand, does not require the linearization of the underlying functions and, instead, propagates the probability distribution functions (PDF) of the parameters in an efficient way. UKF directly transforms a set of weighted sigma points through the nonlinear function and approximates the Gaussian distribution of the state and measurement vectors. Comparative studies have concluded the better robustness of UKF compared to EKF.10,23 UKF is more robust when noisy measurements are present and is accurate up to the second-order Taylor series expansion, which, in case of Gaussian variables, handles up to the third order for any nonlinearity.24,25
UKF has been implemented in various system identification problems in civil engineering. The computational efficiency of UKF has made it favorable for online updating methods such as real-time hybrid simulation (RTHS).26–29 Various numerical studies have been conducted on different aspects of the UKF algorithm. Shao et al. 30 implemented UKF for RTHS of a 3 degree of freedom (DOF) structure. The importance of initial covariance matrices of state and noise vectors, as well as the initial guesses for the structural parameters that are the focus of the system identification (called the target parameters hereafter), was stated. Parametric study of the mentioned variables was conducted for the specific case, and the initial target parameters for the RTHS experiment were obtained from a prior quasi-static experimental testing.
Variants of the UKF method have been suggested to overcome different possible scenarios. Constrained unscented Kalman filter is proposed for enforcing boundaries on the state variables for higher robustness of the algorithm. 31 Adaptive UKF is proposed for online identification of sudden changes in stiffness of structures under seismic loads. 32 Xie and Feng 15 studied the applications of the iterated unscented Kalman filter (IUKF) to highly nonlinear systems subjected to different signal noise levels and concluded that the IUKF is more accurate in highly nonlinear systems and more robust to measurement noise levels. Al-Hussein and Haldar 33 suggested a substructure concept which estimates the stiffness and Rayleigh damping coefficients for a small part of the structure and generates the excitation using an iterative least-squares method. Responses of the key nodes of the structure are required for this implementation, and the stiffness and damping coefficients are used as the initial state vector for the UKF procedure. The authors later suggested a weighted global iteration (WGI) UKF, which, instead of implementing the UKF to the complete set of responses once, applies the UKF to a fraction of the responses several times and reduces the uncertainty of the state parameters. 34 Although the excitation data is no longer required in this approach, the system responses such as velocity and displacement cannot be obtained easily in practical applications. Chatzi and Smyth 35 compared the UKF algorithm with the particle filter (PF) method by testing a 3DOF structure with only the first DOF being nonlinear, and it was shown that UKF is the most computationally efficient. Although a discussion was made about the influence of the initial condition intervals for the PF method, no explanation was provided regarding the selection of the initial target parameters in the UKF method.
Chatzi et al. 36 proposed a modified Bouc–Wen (BW) model to capture an oddly shaped hysteresis behavior obtained in an experiment using UKF. Despite not being far from each other, a number of choices for the initial estimation of the BW parameters were guessed, and it was stated that the effects of these initial guesses are negligible. Another experimental implementation of the online model updating using UKF can be found in Song and Dyke, 16 where a quasi-static cyclic test is performed for offline identification of the BW parameters. The set of identified parameters is later used in the shake table tests as the initial target parameters. In another study, UKF and adaptive constrained UKF methods are compared experimentally; 37 however, the choice of the initial target parameters is not described. The unknown input UKF was also studied on a large-scale concrete shear wall structure. 38 Although the importance of the initial target parameters was discussed for the numerical tests, the initial parameters for the experimental test were chosen based on previous studies.
The importance of the initial guesses for the target parameters is emphasized in most applications of the UKF; yet, to the authors’ knowledge, no nondestructive and practical solutions have been proposed. Moreover, the coupling effect of the initial state covariance matrix and process and measurement noise covariance matrices are not studied comprehensively. This gap exists in spite of the fact that starting the algorithm with arbitrarily chosen parameters may result in the numerical divergence of the process. In this paper, we aim to provide guidelines regarding an optimal and robust system identification with UKF. The joint effect of the initial target parameters and algorithm noise covariance matrices should be investigated in order to be able to diminish the possibility of the algorithm divergence. We demonstrate the impact of the noise parameters on the outcome of the parameter identification on a toy example. Subsequently, we propose a Bayesian optimization method to identify the optimal set of the noise parameters given different sets of initial target parameters. In order to apply this framework to an online parameter identification of a five-story shear frame, a comprehensive numerical analysis of the model is performed. Different sets of initial guesses for the target parameters with different levels of confidence are considered, and their effect on the result of the parameter identification is analyzed. To model the nonlinear behavior of the structure, we use the phenomenological BW model, which has been shown to be a suitable model in this area.12,39,40 Finally, the application of the proposed framework is validated with an experimental parameter identification of a five-story steel frame.
The remainder of this article is organized as follows: “Uncented Kalman filter in system identification” section briefly describes the UKF formulation and the steps required for a successful implementation; “Optimization of UKF initial conditions” section explains the proposed method for the identification of optimum initial conditions for the UKF algorithm; “Premilinary steps for the implementation of the UKF in shake table tasting” section shows the implementation of the proposed steps to a five-story experimental model; “Parameter identification of the experimental model with UKF” section discusses the results of the UKF implementation on the experimental model with and without taking the preliminary steps; and the final section states the concluding remarks.
Unscented Kalman filter in system identification
Kalman filter is commonly used for state estimation of systems given noisy observations. To identify the hysteretic behavior of a structural system based on a parametric model, the set of target parameters is appended to the state vector. Considering the system state parameters in vector




In the rest of the article, the covariance matrices for the process and measurement noise vectors are shown by








Next, the measurement update step can be executed using the Kalman gain factor. This factor determines the ratio by which the process calculations and sensor measurements are weighted and applied to the calculation of the next step state vector




Prior to implementing the UKF process, the initial state vector
Optimization of UKF initial conditions
During the UKF implementation, the process and measurement noise significantly affect the performance of the parameter identification.
26
These noise values determine the rate of convergence in the state parameters. Diagonal elements of matrix



At the same time, matrix

Aside from the noise parameters discussed above, the performance of UKF is affected by the initial guesses about the target parameters,
The influence of the initial parameters on the UKF performance
In this section, the influence of the
Different initial guesses for the illustrative example.

The results of the parameter identification are evaluated by calculating the root mean square (RMS) error of the distance from the identified parameters to the true values of the target parameters. Figure 1 shows the RMS values for different noise and initial parameters. It can be observed that, in all three cases, we only obtain accurate results for certain combinations of noise parameters. If
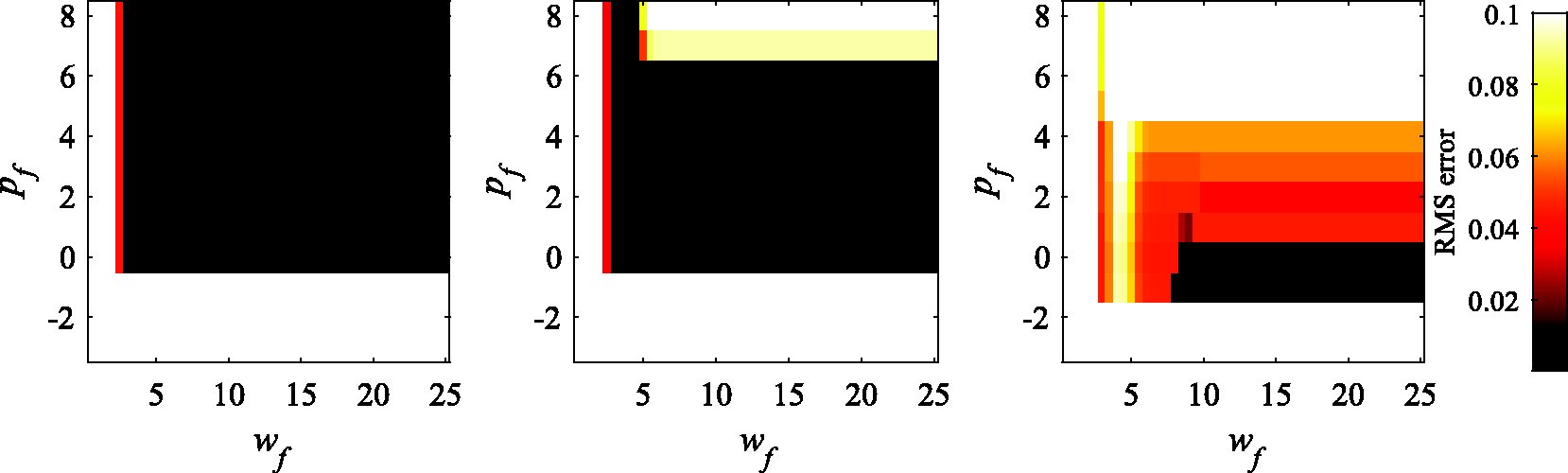
Results of the UKF implementation on the illustrative example with different initial conditions. (a) Case 1, (b) Case 2, and (c) Case 3.
The proposed optimal initialization process for UKF
Based on the observations from the illustrative example in the previous section, it can be inferred that the need for an inclusive approach determine the initial conditions of the UKF algorithm is crucial. Therefore, in this manuscript, a framework that is designed to ensure a successful UKF parameter identification is proposed.
Parameter identification is usually performed with phenomenological models where parameters do not convey physical meanings. Therefore, the proposed method begins with creating a simple constitutive model, such as a bilinear model, to get a good sense regarding the initial guesses about the target parameters. This model is created with the knowledge about the basic properties of the experimental specimen including geometric dimensions, yield stress, mass, etc. Then, a phenomenological model is fitted to the numerical constitutive model in an offline process. The identified parameters for this model are stored to be used as the initial guesses for the final experimental testing. Next, the virtual emulation of the experiment is performed by considering the fitted phenomenological model as the actual experimental specimen and intentionally distancing the guesses about the initial target parameters from the identified parameters. These inaccurate guesses are planned to account for the uncertainty of the guessed initial target parameters in the actual experiment. By emulating the experiment, the noise combinations that perform well for inaccurate initial target parameters can be identified. The sets of combinations can be divided into different zones. Based on the confidence in the proximity of the fitted model to the experimental specimen, the operator can select either a set of noise parameters from an “Accurate” zone or a “Robust” zone. Parameters in the Accurate zone are intended to deliver the best UKF performance, provided that the initial guesses are chosen close to the actual parameters. On the contrary, the Robust zone provides noise parameters that prevent the divergence of the algorithm for incautiously guessed initial target parameters. Since every condition in the experimental test is considered in the simulation, the authors hypothesize that the noise combinations found for the emulated model will adequately fit the experiment.
The identification of the suitable noise parameters requires tedious virtual implementations of the UKF process on the initially fitted phenomenological model. Therefore, to reduce the computational costs, a Bayesian optimization algorithm is utilized to find the mentioned zones. Details of the Bayesian optimization are described in the next section.
Bayesian optimization of UKF algorithm parameter
It has been customary to obtain a reasonable set of noise parameters
We formulate Bayesian optimization to find the global minimum of the objective function over a compact set 
This procedure starts with choosing a few instances randomly and fitting Gaussian processes to the observations. Then, an exploration–exploitation trade-off should be considered for the choice of the next sampling point. The exploration contributes to areas with high uncertainty, and the exploitation takes advantage of the points that are more likely to be closer to the extremum. The trade-off can be managed in the form of an improvement-based acquisition function. The Bayesian approach suggests using the following acquisition function which automatically balances the trade-off

For the sake of simplicity and better visualization of the results, the measurement noise parameters are considered constant in this article and are determined based on the measured noise from the sensors. However, one can include
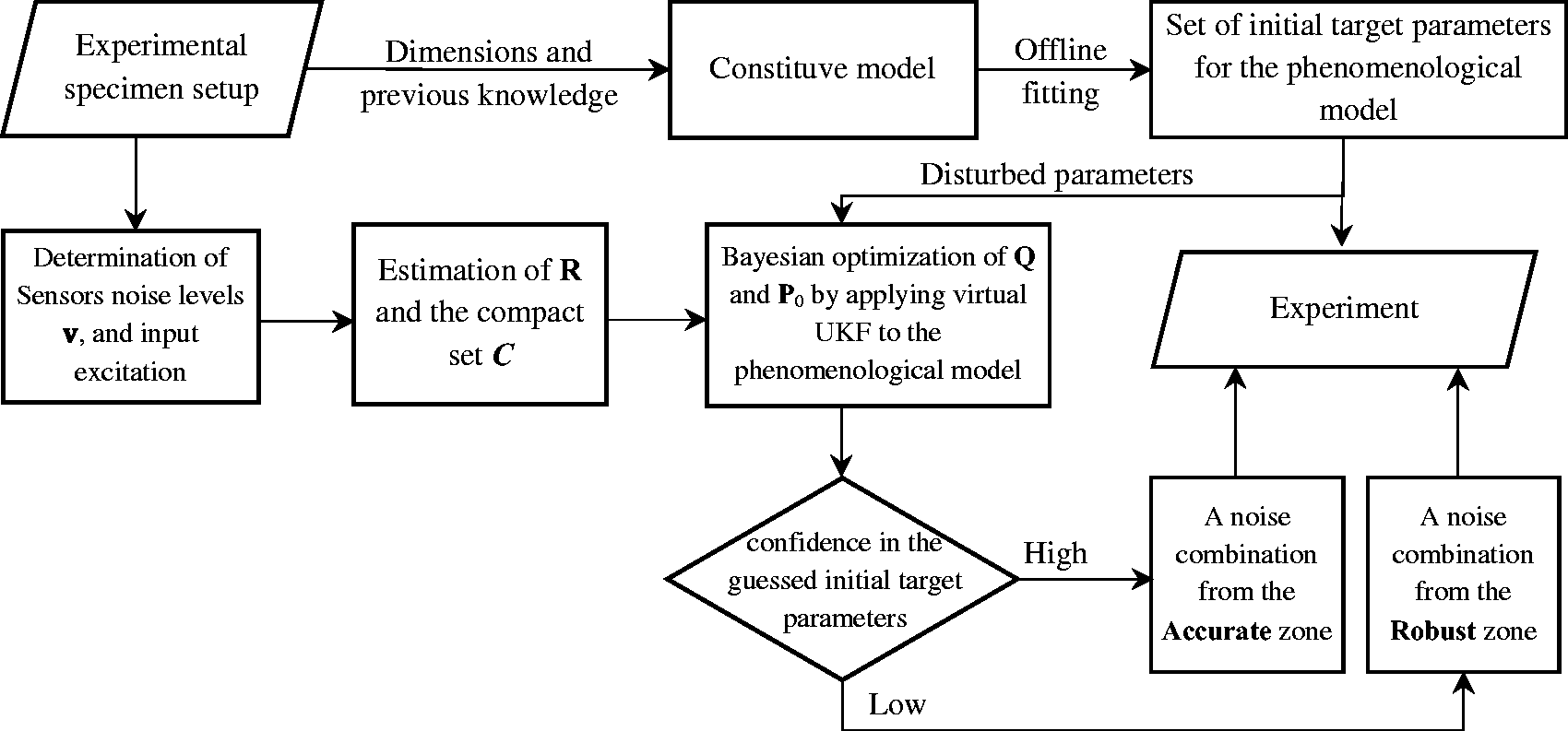
Flowchart of the proposed approach.
Preliminary steps for the implementation of the UKF in shake table testing
The proposed approach is implemented in the experimental parameter identification of a five-story shear frame. The preliminary steps prior to the experimental testing are described in this section, and the experimental procedure is discussed in “Parameter identification of the experimental model with UKF” section. In the following subsections, the state-space formulation for parameter identification of an MDOF BW model is derived, and the required steps before the final experiment follow next.
Equation of motion for a nonlinear MDOF system
As stated in the “Introduction” section, in this study, the nonlinear behavior of steel material is modeled by a classical BW model, and degradation and pinching effects are neglected. The equation of motion for an MDOF nonlinear system can be considered as follows


Considering the equation of motion for a q-story shear building with identical lumped masses m located at floors, the mass matrix can be considered as 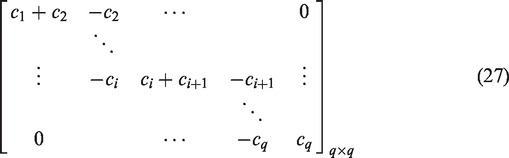
Assuming identical components, the damping matrix can be formed using only two parameters 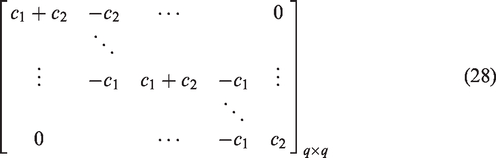
Therefore, the equations of motion can be decoupled as follows




Equation set (29) can be used for the finite element model updating of a nonlinear shear building.
State space formulation of the MDOF system
In order to formulate the dynamic response problem of an MDOF structure into nonlinear parameter identification formulation, the state-space form of the MDOF equation of motion is constructed. The floor accelerations are considered as measurements, while the ground acceleration signal is utilized as the input control to the system. The state vector consists of the system-state variables followed by the BW parameters
The nonlinear state-space equation can be written as
In the case of seismic loading, the input 
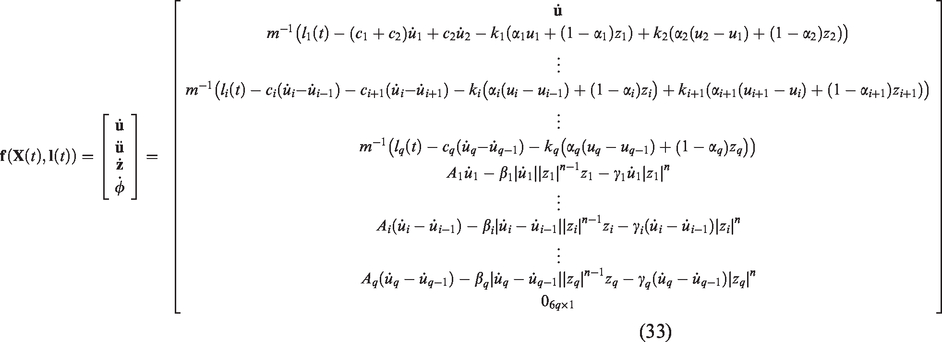
At the same time, the acceleration measurement vector can be calculated as follows:
In case the same components are used for all stories of the shear model, the vectors of BW parameters in vector
Experimental model
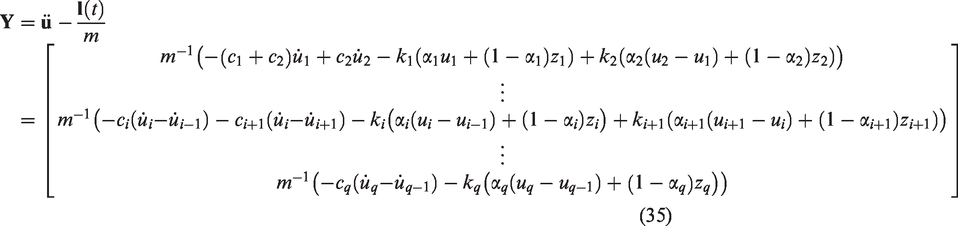
The experimental model represents a five-story shear building with steel columns. This specimen is manufactured with identical floor masses and column components. The details of the floor sections and columns are shown in Figure 3. The contributing mass of each story is 23.2 kg, and the total linear stiffness of the components in each floor is approximated as 1.82e5 kN/m.
The five-story building model.
At this stage, the measurement noise levels are determined in idling situations. The standard deviations of the five acceleration sensors were measured in units of
Identification of the
parameters
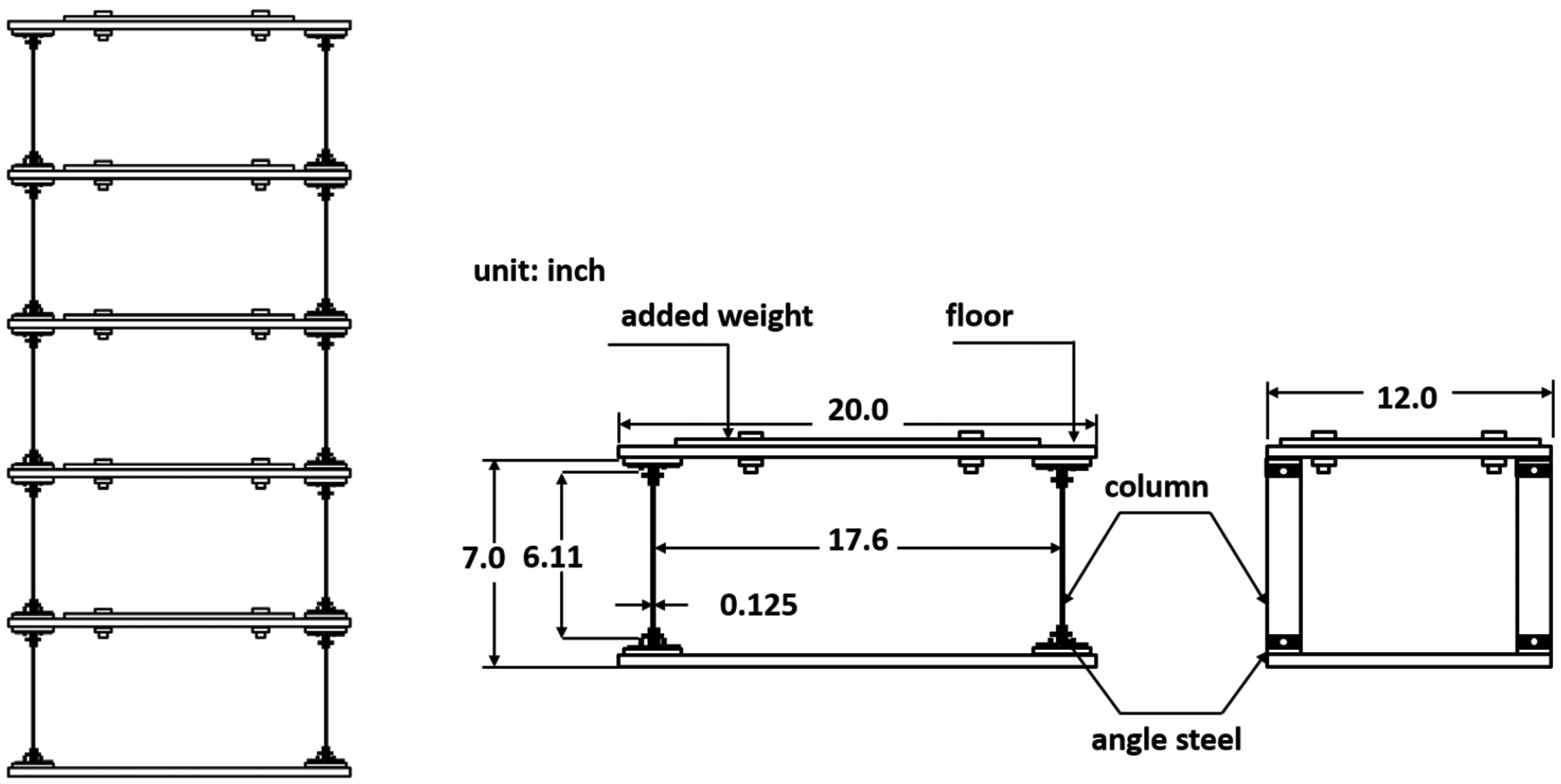
A preliminary numerical analysis is required to obtain reasonable guesses for the
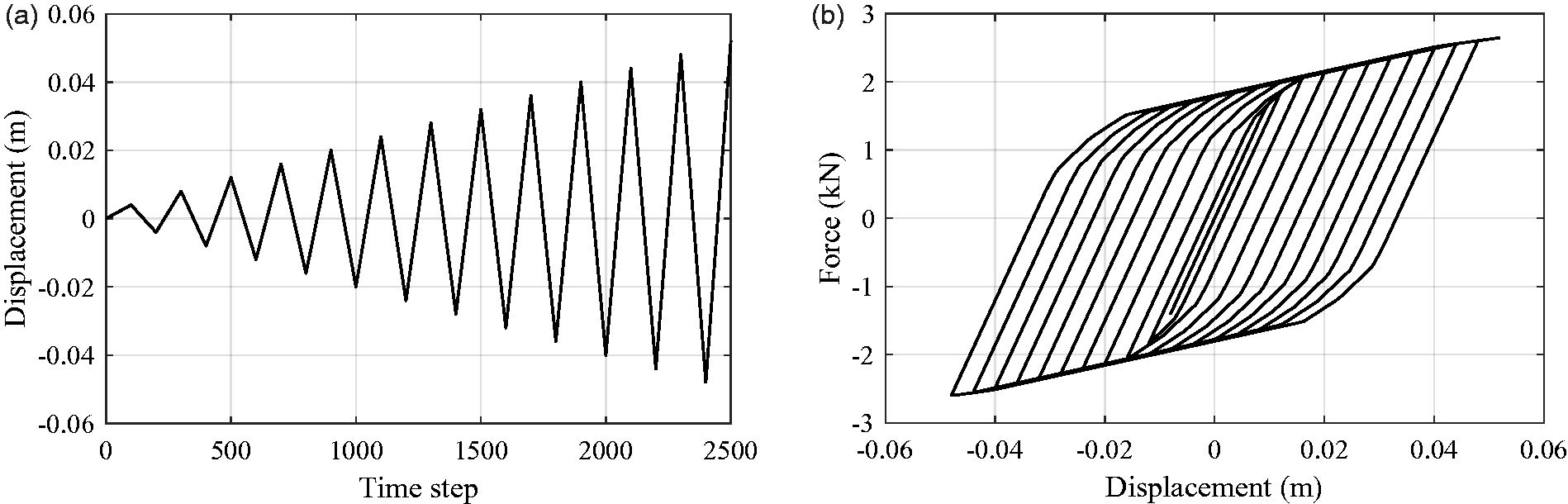
The behavior of the constitutive bilinear model: (a) displacement input and (b) hysteretic cycles.
Based on the numerical response of the 1-DOF system, a set of BW parameters are fitted to the bilinear model, as shown in Figure 5(a). In order to simulate the uncertainty of initial state parameters in the experimental test, inaccurate
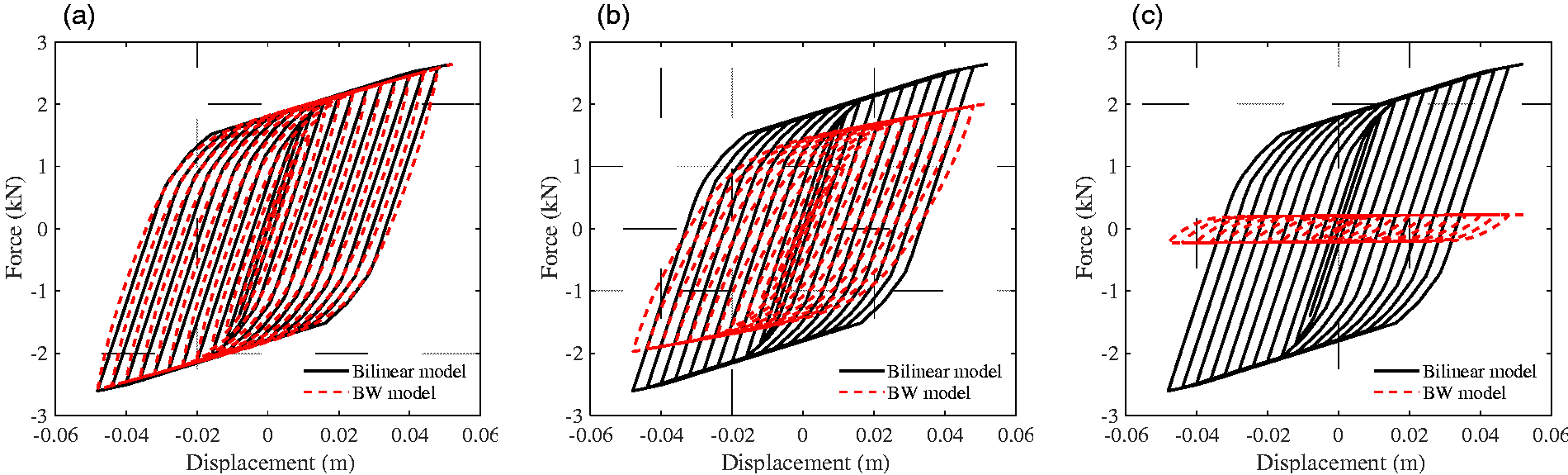
The comparison between cyclic behaviors of the considered BW models with the bilinear model. (a) Case 1, (b) Case 2, and (c) Case 3.
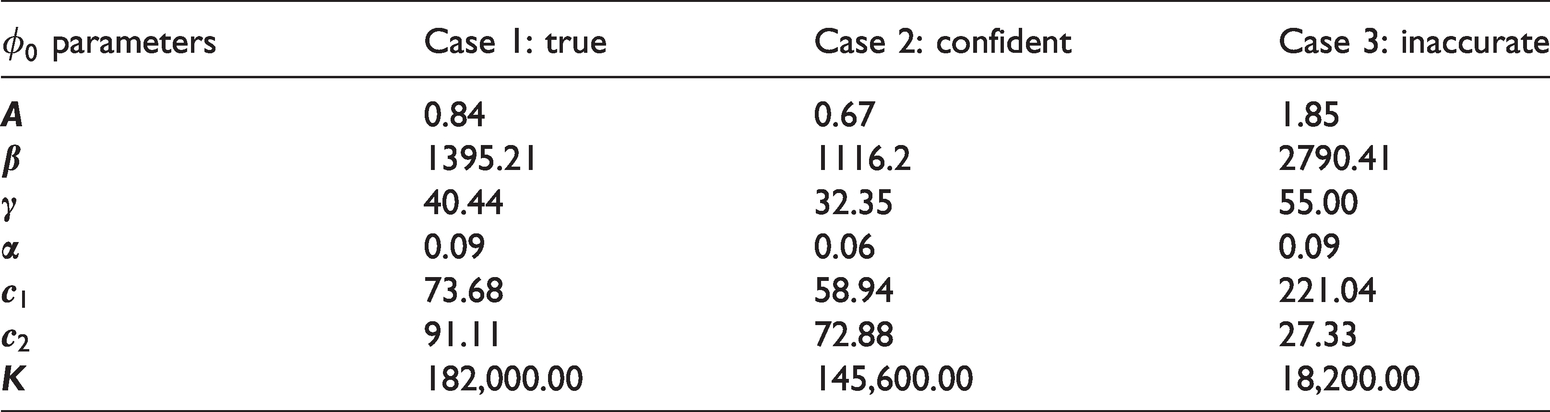
The values of the initial guesses for the target parameters of each case.
The parameter n in a BW model is an exponential constant, and a minor variance may result in the divergence of the algorithm. This issue worsens in the presence of signal noise, and it is beneficial to consider
Optimization of the UKF noise parameters
To identify a set of optimal noise parameters for the experimental test, different combinations are tested on emulated test setups, and different zones are identified with Bayesian optimization. First, a time history analysis with the specified ground motion is performed on the fitted BW model (Case 1 in Table 2), and acceleration responses are recorded. Then, different rounds of UKF are performed using different
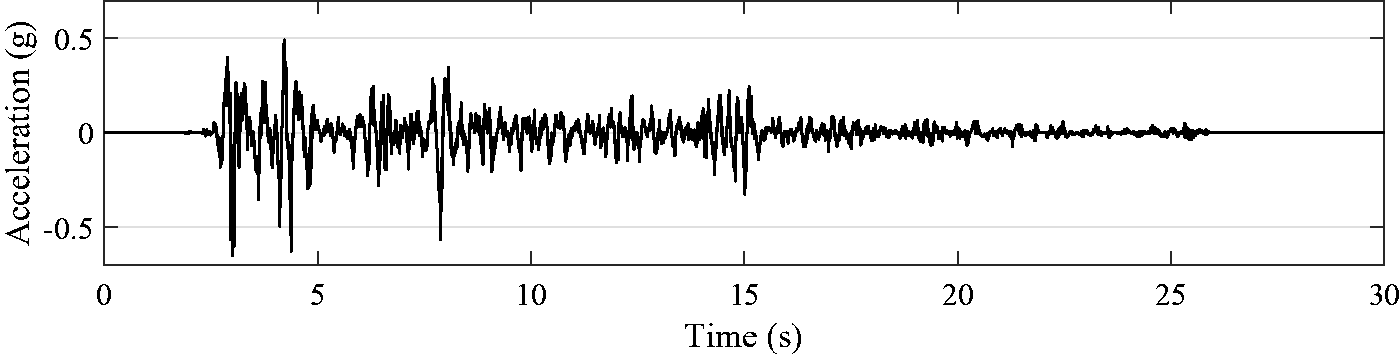
The time series of the El-Centro earthquake excitation.
The measured signals in the virtual emulation are contaminated with white Gaussian noise at the same level as the measured noise from actual sensors in vector
The outcome of each optimization process is presented in a 2D domain showing all the combinations of the noise parameters considered. In each figure, the yellow-colored spots show the initial 30 points. The other spots marked as green indicate the points suggested by Bayesian optimization for evaluation, and the surface shows the mean value for the fitted Gaussian process model. For these surfaces, areas with lower RMS errors are illustrated with darker colors. Spots marked with a red symbol denote the divergence of the process in that noise combination. The optimization solver is trained to avoid the red spots in order to focus on areas where the algorithm converges with better performance.
The optimization path is shown in terms of RMS value in Figure 7 and also in Figure 8 as a 2D map. Figure 7 shows the suggestions of the Bayesian optimization through the convergence to the baseline minimum, which is the global optimum in the chosen domain. Comparing the minimum identification errors (the red-dashed lines in Figure 7) among the three cases, it can be inferred that the minimum error found significantly increases with a worse choice of the initial target parameters.
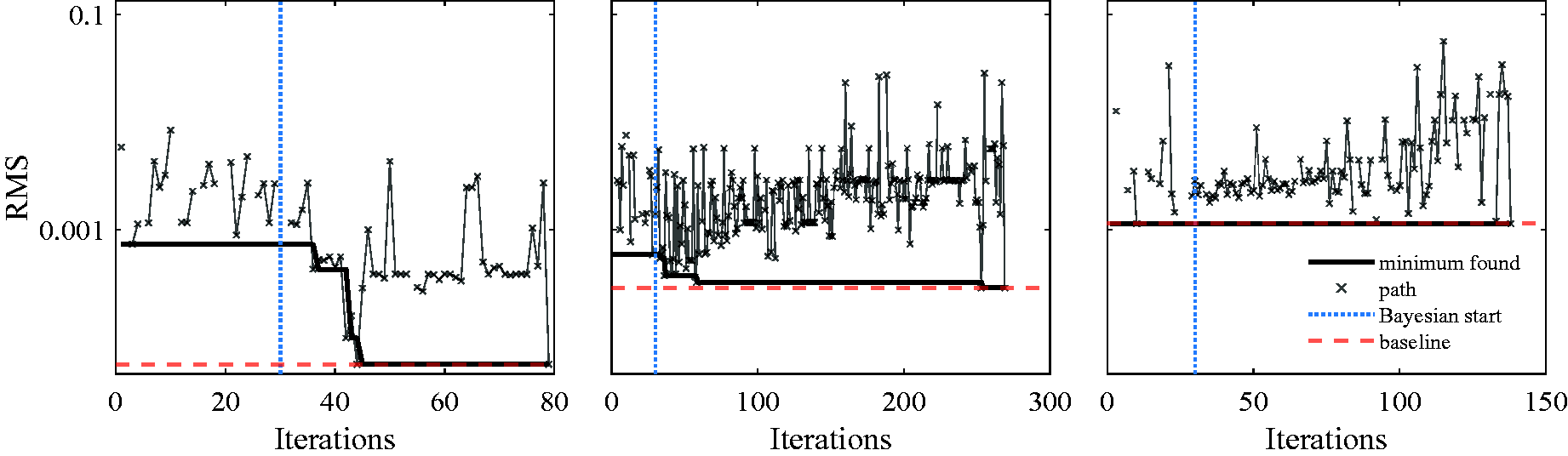
Illustration of individual sample points, and the path suggested by Bayesian optimization. (a) Case 1, (b) Case 2, and (c) Case 3.
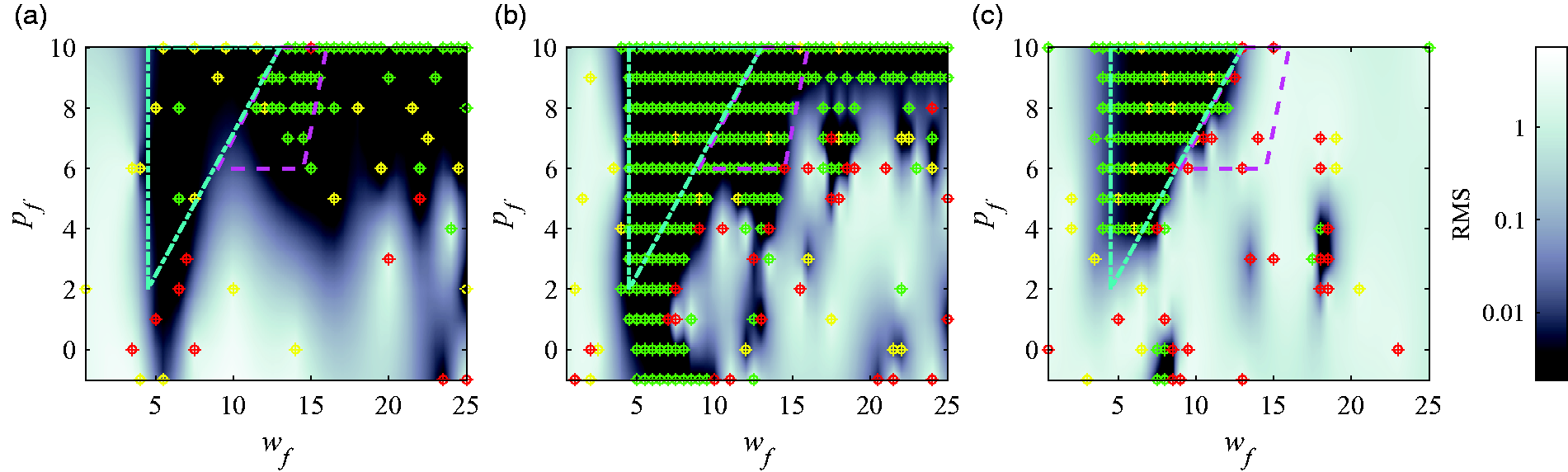
The domain considered for
Figure 8 shows that a Robust zone can be described by a triangular shape for all three cases. Although the performance is better for Cases 1 and 2, in this zone, the process converges regardless of the initial target parameters. This zone is enclosed with cyan dash-dotted lines in Figure 8. Moreover, a smaller trapezoid area can be marked for the first and second cases where the error is significantly lower than other areas and can be considered as the Accurate zone. It should be pointed out that choosing a noise combination in this area will result in the divergence of the process for Case 3 where the initial target parameters are chosen carelessly. The Accurate zone is enclosed with magenta-colored dashed lines in Figure 8.
Parameter identification of the experimental model with UKF
The experimental model is mounted on a 6-DOF shake table in the Intelligent Infrastructure System Lab (IISL; https://engineering.purdue.edu/IISL/) at Purdue University for the dynamic testing. In this setup, the El-Centro ground motion is imposed laterally to the building’s axis. Accelerometers and optical sensors are used to measure the absolute responses of the frame, as indicated in Figure 9. The data acquisition system recorded the structural acceleration responses with a sampling frequency of 2048 Hz. Also, the displacement responses are measured using a 6D krypton optical tracking system, capturing the position of LED sensors on model’s base and floors. The krypton system recorded the responses with a sampling frequency of 60 Hz.
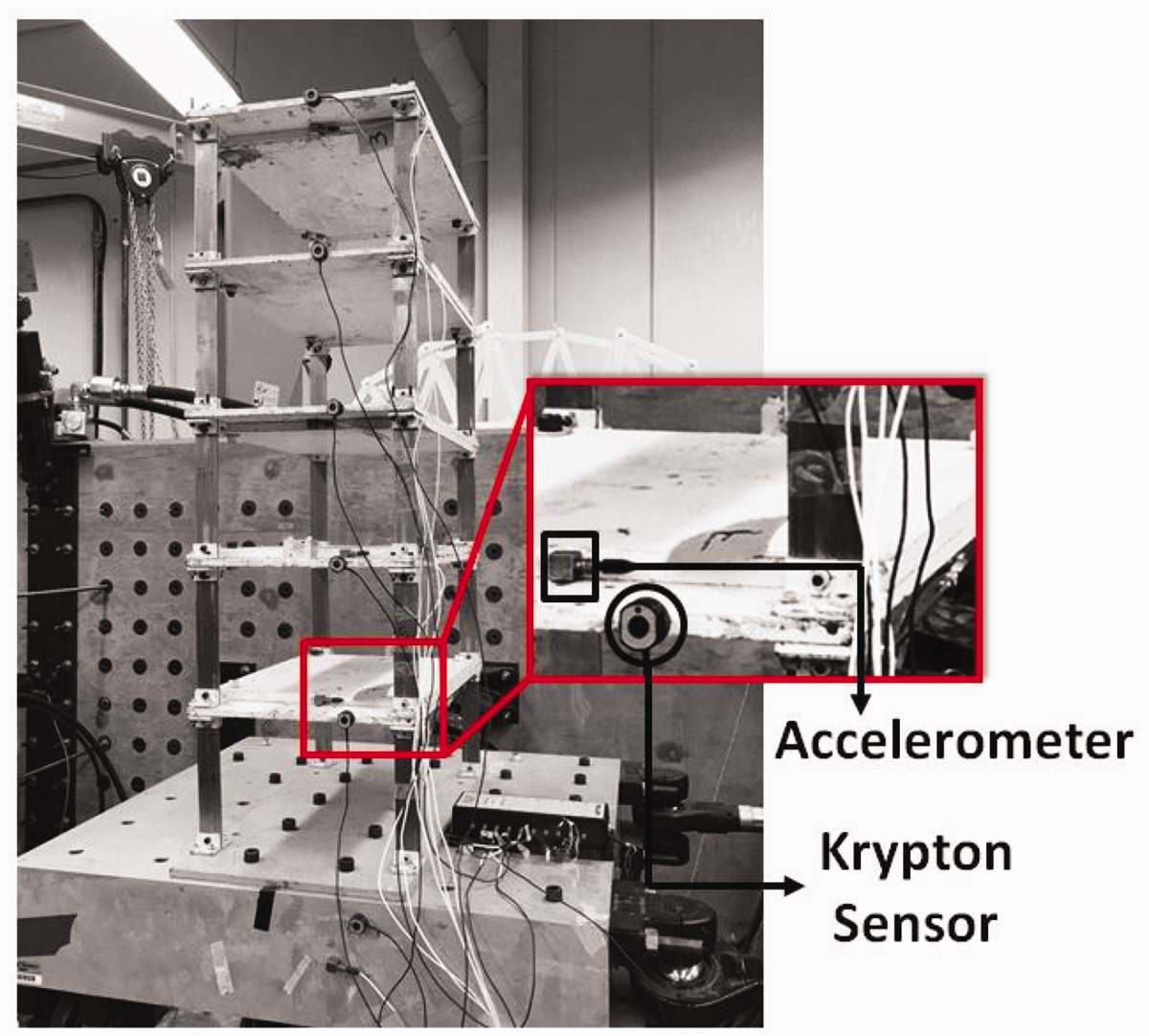
Shake table test configuration.
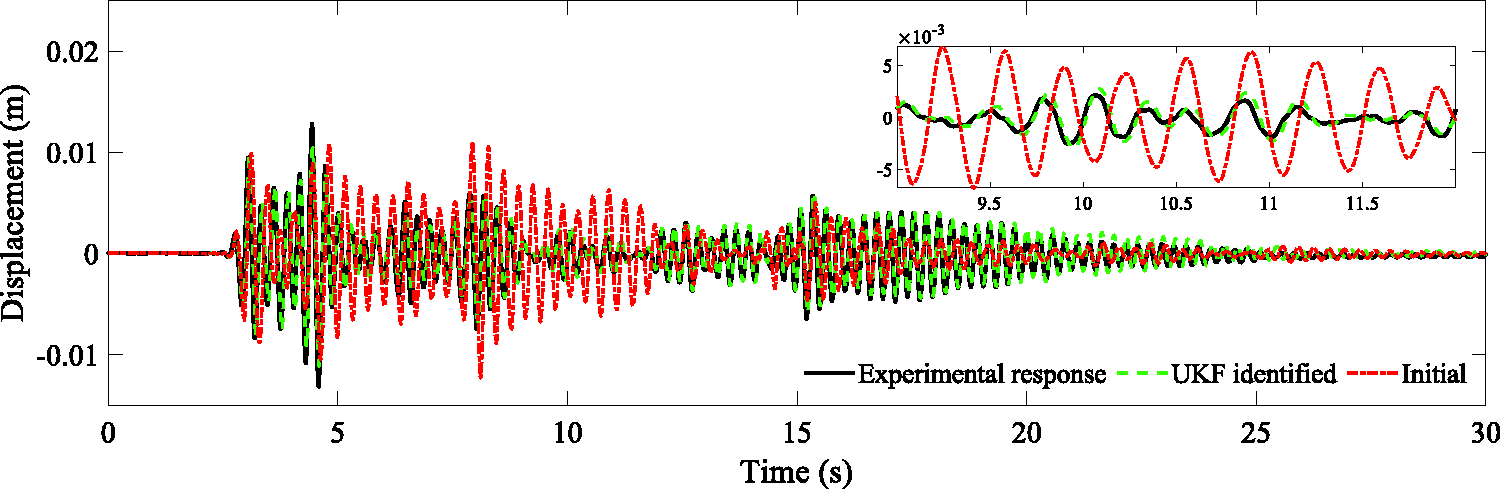
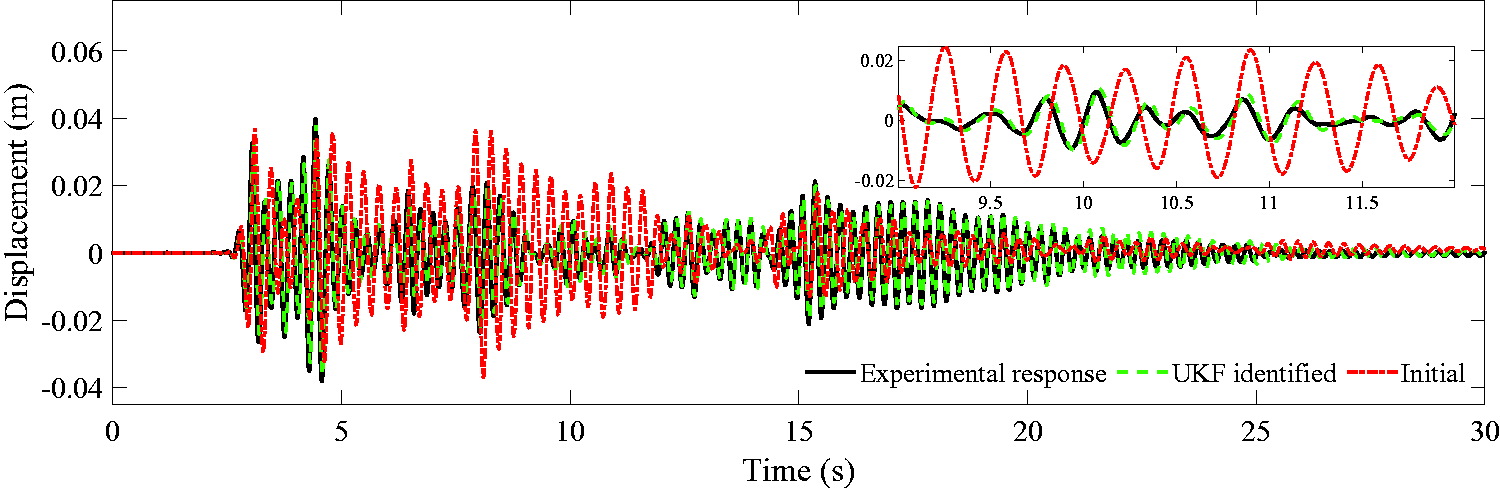
To test the UKF performance with optimized algorithm parameters determined from the numerical study, we only need to use the target parameters of Case 1 in Table 2 as
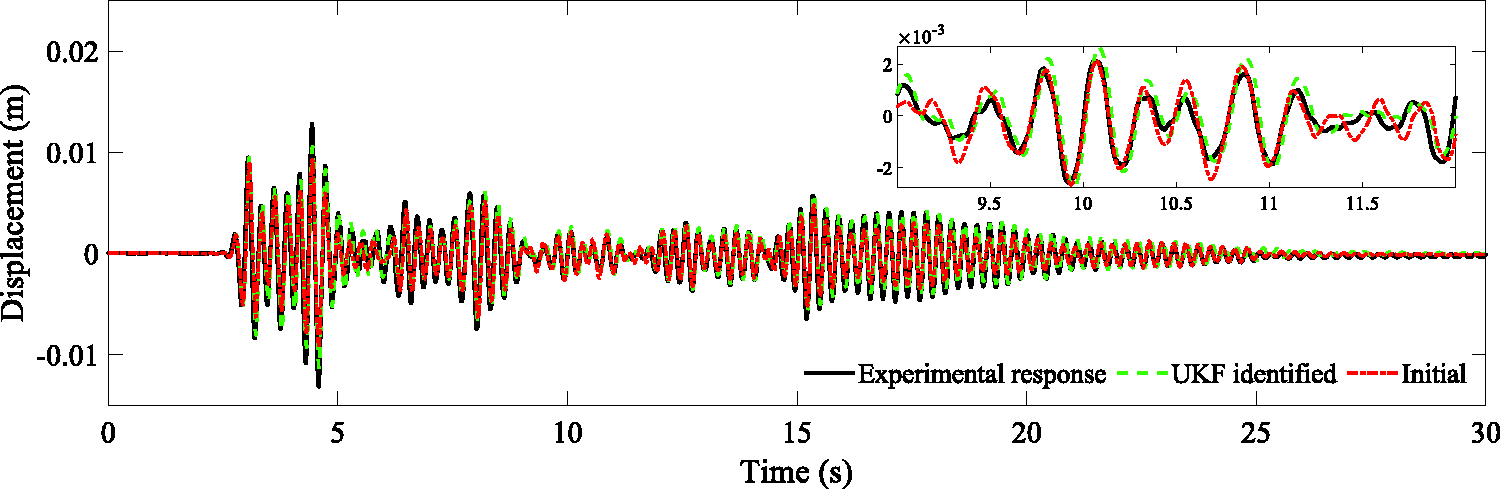
Displacement response of the first story of the model for Case 1 of the initial BW parameters.
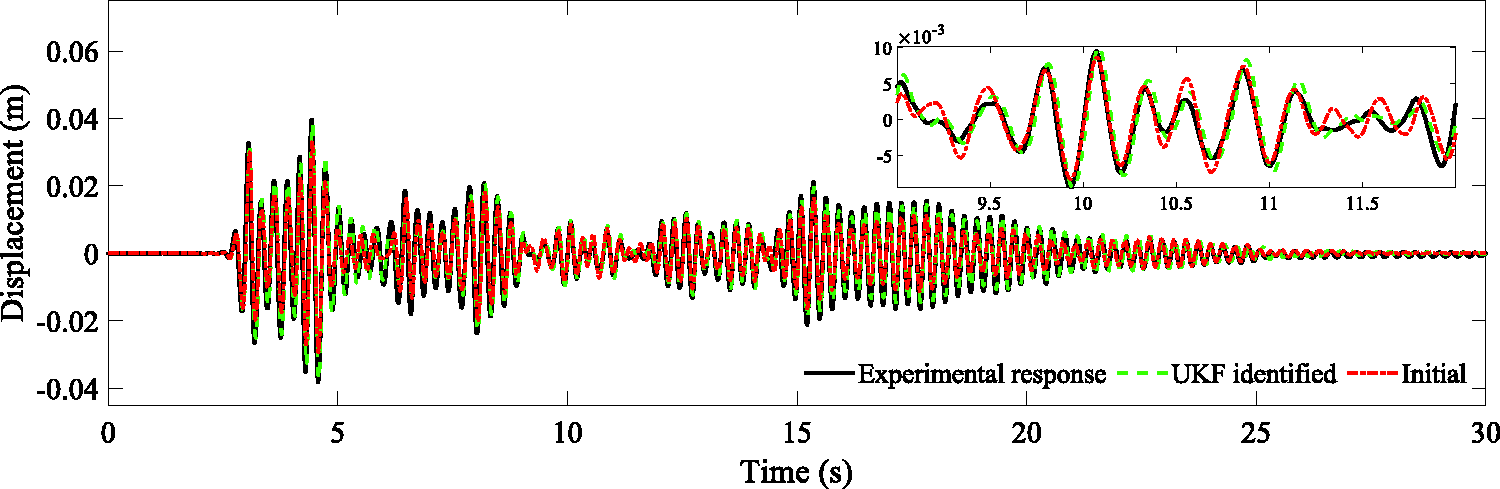
Displacement response of the fifth story of the model for Case 1 of the initial BW parameters.
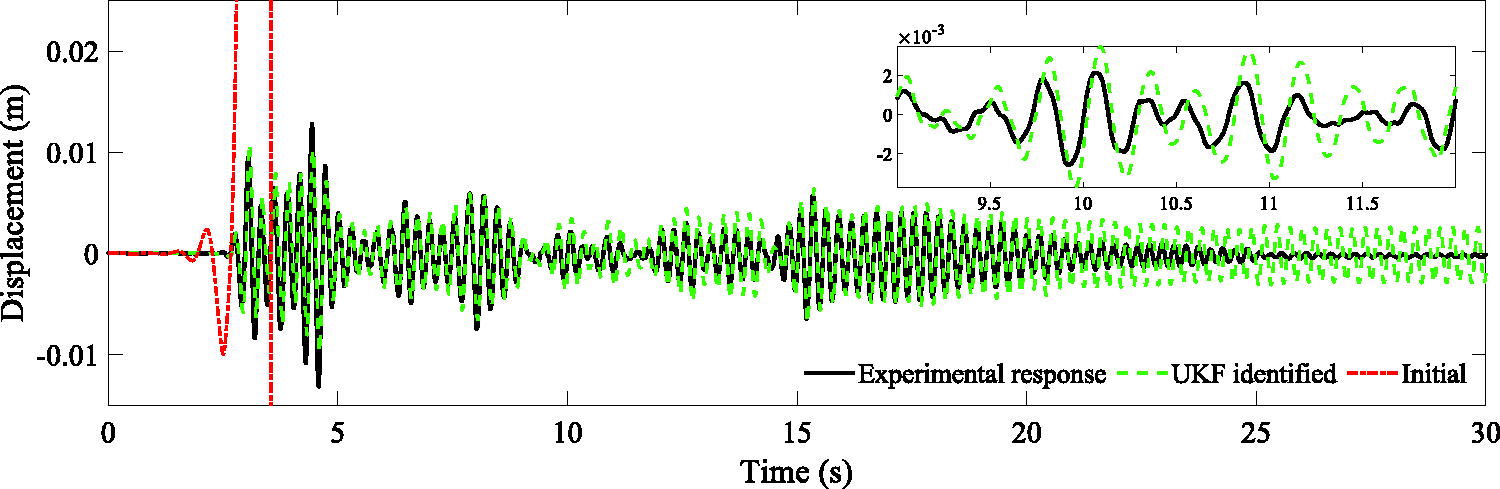
Displacement response of the first story of the model for Case 2 of the initial BW parameters.
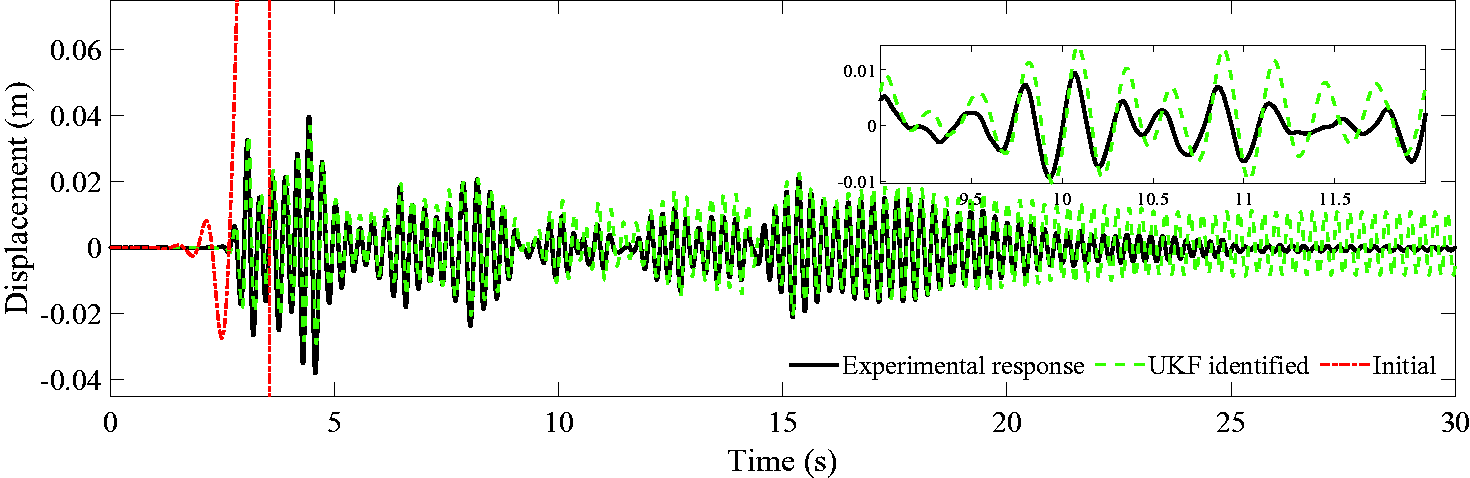
Displacement response of the fifth story of the model for Case 2 of the initial BW parameters.
Displacement response of the first story of the model for Case 3 of the initial BW parameters.
Displacement response of the fifth story of the model for Case 3 of the initial BW parameters.
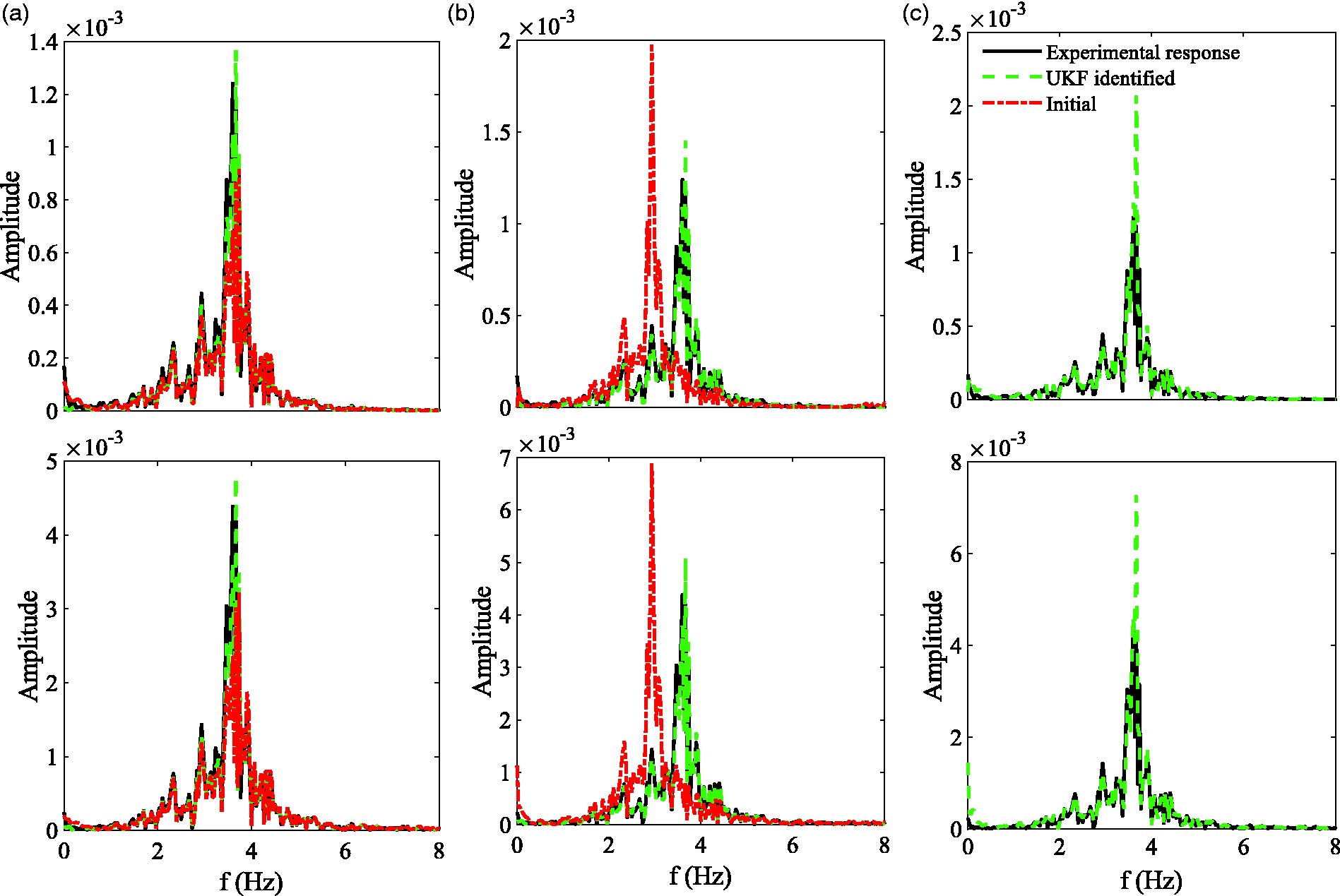
The amplitude frequency spectrums of the response displacement. The top row shows the responses of the first story, and the bottom row shows the fifth story responses. (a) Case 1, (b) Case 2, and (c) Case 3.
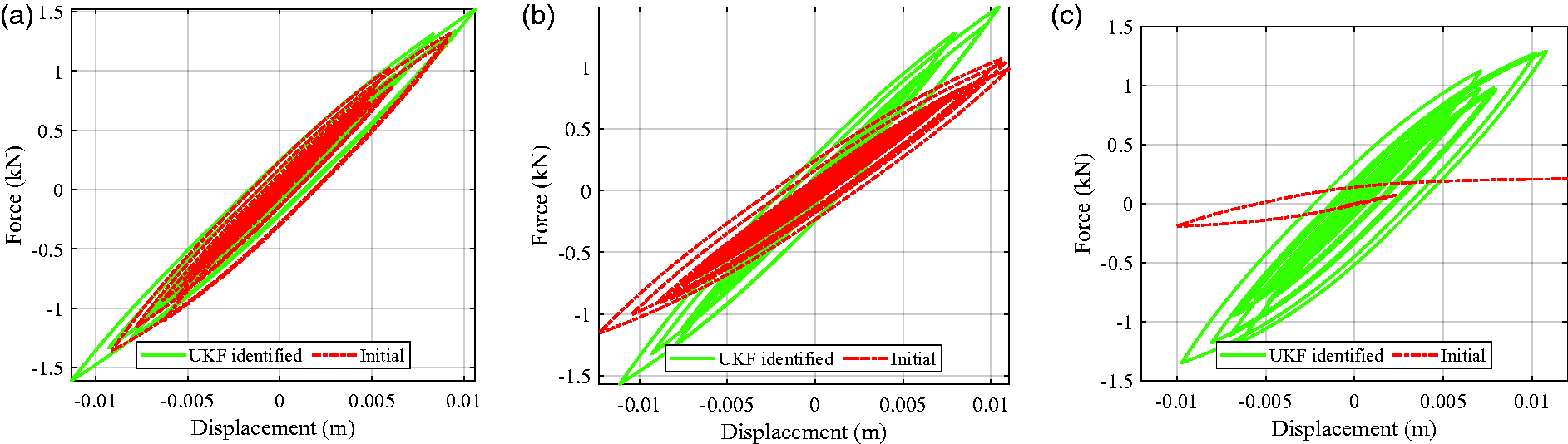
The hysteresis behavior of the first story component under seismic loading. (a) Case 1, (b) Case 2, and (c) Case 3.
The quantitative improvements obtained from UKF identified parameters over the initial
Rate of improvement in parameter identification with UKF in different cases.

To find out the performance of the UKF algorithm on the experimental testing given other noise combinations, the results of a grid search for all the combinations of the
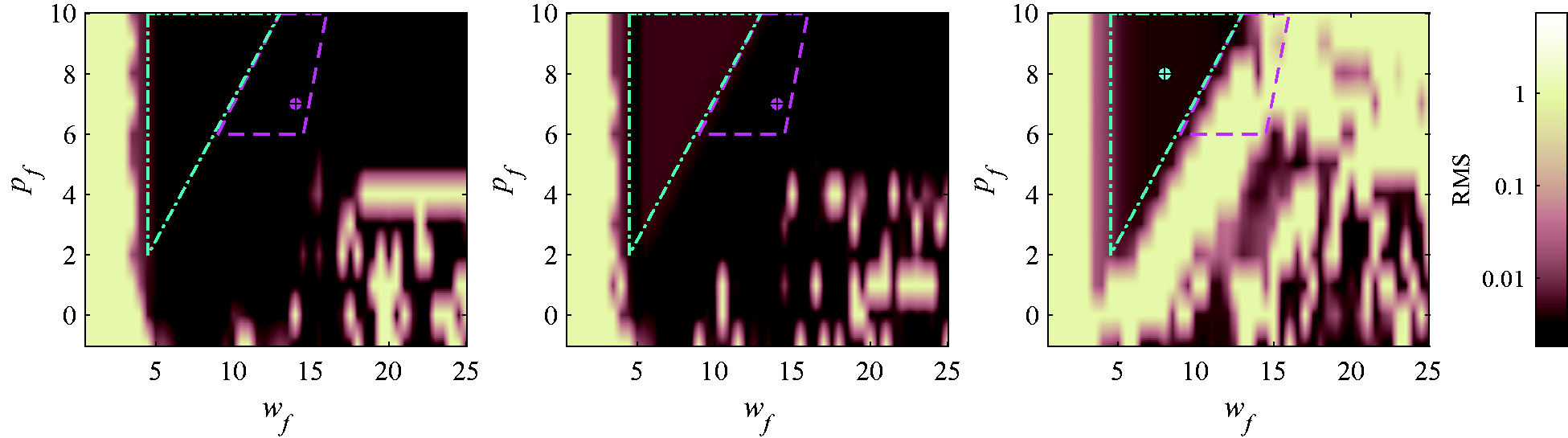
Performance of the UKF algorithm on the experimental test setup given different initial target parameters. The borders of the robust and accurate zones, as well as the chosen combinations for the experimental testing are shown on top of the experimental results. (a) Case 1, (b) Case 2, and (c) Case 3.
Finally, it can be argued that the Bayesian optimization of the UKF parameters can help preventing the divergence of the process in the expensive experimental tests. Also, if good chances of convergence with a high performance are required, one should obtain a decent estimation of the initial target parameters.
Conclusion
Parameter identification using the UKF algorithm is a tricky task and needs careful attention to the details. Several parameters contribute to the outcome of the algorithm, and in case of experimental testing, a preliminary study should be performed in order to obtain a reasonable set of parameters to start the process with. In this paper, a Bayesian optimization approach for finding the initial parameters of UKF algorithm is proposed and studied. Utilizing the optimized results, a combination of the noise parameters is chosen, and the parameter identification process is implemented on a five-story model, experimentally. Specific findings and contributions are summarized as follows: The hypothesis is proved that the process noise covariance matrix as well as the initial state covariance matrix induces large variations in the outcome of the UKF algorithm, and poor judgment may result in the divergence of the process. Given different initial BW model parameters, it is validated that the Bayesian optimization can automatically select the best noise combination required to run the UKF. The findings yield the same optimal identification performance as compared to the combinations determined from a grid search approach. The optimization approach demonstrates that a trade-off exists between the robustness of the UKF algorithm and the final identification accuracy. Therefore, a suitable choice of the initial state parameters can avoid the divergence of the UKF process, but furthermore, if a high accuracy outcome is desired, choosing a splendid combination for the noise parameters is undeniable. Meanwhile, the minimum identification error, which is the theoretical best identification performance that can be achieved, is affected by the initial guesses for the target parameters of the BW model. If the initial guesses are closer to the true parameters, the possible minimum error is smaller. Therefore, the selection of initial BW parameters is more important and should be carefully managed.
Footnotes
Acknowledgements
The experiment is conducted in the Intelligent Infrastructure System Laboratory (IISL) at Purdue University. The authors are also grateful to Prof Shirley Dyke, the PhD advisor of the correspondence author and the director of the IISL, for the access to the research infrastructure.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research project is funded by the National Science Foundation (NSF) under award ECCS-1839833 and the University of Utah start-up research grant. The development of the research infrastructure is funded by NSF under award CNS-MRI-0821713.