
Abstract
In this study, an active mass damper that could track desired displacement was considered as a controller to suppress vibrations of a plate. Multi-input multi-output modal-space negative acceleration feedback control algorithm and decentralized multi-input multi-output negative acceleration feedback control algorithm were proposed and their stability conditions were checked theoretically. Stability conditions for both controllers are static, and they can effectively increase the damping of target mode without causing instability in low-frequency region. It was proved theoretically that both the multi-input multi-output modal-space negative acceleration feedback control and the decentralized multi-input multi-output negative acceleration feedback control can suppress vibrations of a continuous system such as a plate.
Keywords
Introduction
Reduction of vibrations in structures is a main engineering objective for humans, machinery, sensitive instruments, automobiles, airplanes and buildings because excessive vibrations may harm human body and cause structural failure. In some cases, structural modification may be impossible. For such cases, an auxiliary system that can absorb vibrations of the main structure is preferred. A dynamic absorber (DA) or a tuned mass damper (TMD) that can be easily attached to the structure of interest has been developed to suppress vibration of the primary structure. DA or TMD is a passive system that suppresses vibration of the primary structure by tuning its natural frequency to dominant frequency component. Dominant frequency can be either excitation frequency or natural frequency of the primary structure. 1 DA has been used to absorb vibration caused by harmonic disturbance with fixed frequency. If damping of the DA is zero, then vibration can be suppressed theoretically. However, a small amount of damping is more effective when disturbance has varying excitation frequency. Hence, we will use the term of TMD instead of DA in this case. Passive TMDs have been effectively used to suppress vibrations of structures. However, TMD has limited performance because of its fixed structural parameters, a narrow suppression frequency range, ineffective reduction of non-stationary vibration, and a sensitivity problem because of detuning. To improve the performance of TMD, a new light-weight passive control device called Tuned Mass Damper Inerter (TMDI) has been proposed to achieve mass amplification effect.2,3 Cao and Li 4 have proposed Tuned Tandem Mass Damper-Inerters by integrating tuned tandem mass dampers with two inerters, resulting in high effectiveness and wide frequency spacing.
To suppress vibrations and improve the performance of system of interest, active methods have been sought. Semi-active mass damper (SMD) and active mass damper (AMD) have been proposed in order to overcome limitations of passive TMD. Both SMD and AMD are equipped with sensors, actuators, and a microprocessor that can operate according to a control algorithm. SMD differs from AMD in that the damping coefficient of the damper is changed by control command, while AMD produces a force according to command signal. One benefit of using SMD or AMD is that it can cope with changes in the dominant frequency such as changes in natural frequency of the structure or excitation frequency of external disturbances by sensing vibrations. However, AMD may destabilize a main structure if it is ill-designed. Hence, reliability of the control system should be guaranteed before implementation.
Control algorithm is very important when applying AMD technology to real structures because instability may occur. Many control algorithms have been proposed and validated both theoretically and experimentally. Kobori et al.5,6 have proposed a simple control algorithm based on optimal control theory. Li et al. 7 have applied multiple AMDs to torsional vibration of building structure. Li et al.8,9 have also used multiple AMD to attenuate vibrations of structures due to ground excitation. They demonstrated that multiple ATMD could significantly reduce vibration of structures. Chung et al. 10 have developed active tendon system driven by hydraulic servo system with optimal control law. Chang and Yang 11 have proposed a feedback control using displacement, velocity, and acceleration measurements. Ankireddi and Yang 12 have also investigated feedback control for AMD. Cao et al. 13 have obtained linear quadratic regulator (LQR) and a nonlinear feedback control algorithm. Cao and Li 14 have developed a robust control algorithm. Samali and Al-Dawod 15 have applied a Fuzzy Logic controller to AMD. Ricciardelli et al. 16 have considered AMD based on linear quadratic regulator theory. Cao and Lin 17 have proposed new control strategies. Wang and Lin 18 have developed variable structure control and fuzzy sliding-mode control.
Research on control algorithms for AMD mentioned above assumed that displacement, velocity, and acceleration were measurable. However, a popular sensor for vibration measurement in real world is an accelerometer. One may think that velocity and displacement can be obtained by integrating accelerometer signal in time. However, this is not possible because of drift and bias in the accelerometer signal. Observer can be constructed for velocity and displacement using measured acceleration. This would require additional computation. Hence, a feedback control algorithm that can use acceleration signal directly is preferred to avoid computational complexities for real-world application.
Recently, negative acceleration feedback (NAF) control has been proposed by Yang et al. 19 to control moving mass based on servo mechanism. The advantage of a servo control system is that movement of the mass can be accurately controlled by the AC servo motor. Yang et al. 19 have proposed an NAF control that uses an accelerometer signal and produces desired displacement of the moving mass. The proposed NAF control is different from other control algorithms that produce control force. The NAF control theory that directly uses an accelerometer signal as a sensor input is different from other control theories that require displacement or velocity. Yang et al. 19 have demonstrated the effectiveness of NAF control experimentally by using a building-like structure. Talib et al. 20 have designed multi-input multi-output (MIMO) modal-space NAF control and verified the control law experimentally by using a building-like structure. They used linear servo motors to move masses.
Although AMD with NAF control has been successfully applied to building-like structure, whether AMD can be applied to a continuous structure such as plate remains unclear. Active vibration control of a plate-like structure has been studied by many researchers. However, most of these studies were focused on vibration control by means of piezoelectric wafers. Lazarus et al.
21
have carried out theoretical modelling and MIMO LQG control for a rectangular plate by using an assumed mode method. Li et al.
22
have investigated the use of a piezoelectric wafer attached to a rectangular plate using
In this study, active vibration control of a rectangular plate equipped with multiple AMDs was investigated theoretically. In order to increase damping of natural modes, MIMO modal-space NAF control and decentralized MIMO NAF control were proposed for vibration suppression of a plate, and their stability conditions were investigated mathematically. It was proven that stability conditions of the MIMO modal-space NAF control and the decentralized MIMO NAF control are static, meaning that the stability of control algorithms will not depend on frequency. Control and observer spillover problems that might occur when applying MIMO modal-space NAF control were also investigated. The proposed MIMO modal-space NAF control and the decentralized MIMO NAF control were tested numerically. Numerical results showed that the proposed control methods can be successfully applied to a plate structure if the gain matrix is sufficiently small.
Dynamic modelling of rectangular plate with AMDs
We will briefly summarize the work of Kwak and Han
24
on free vibration analysis of a rectangular plate. Let us consider a rectangular plate with side lengths
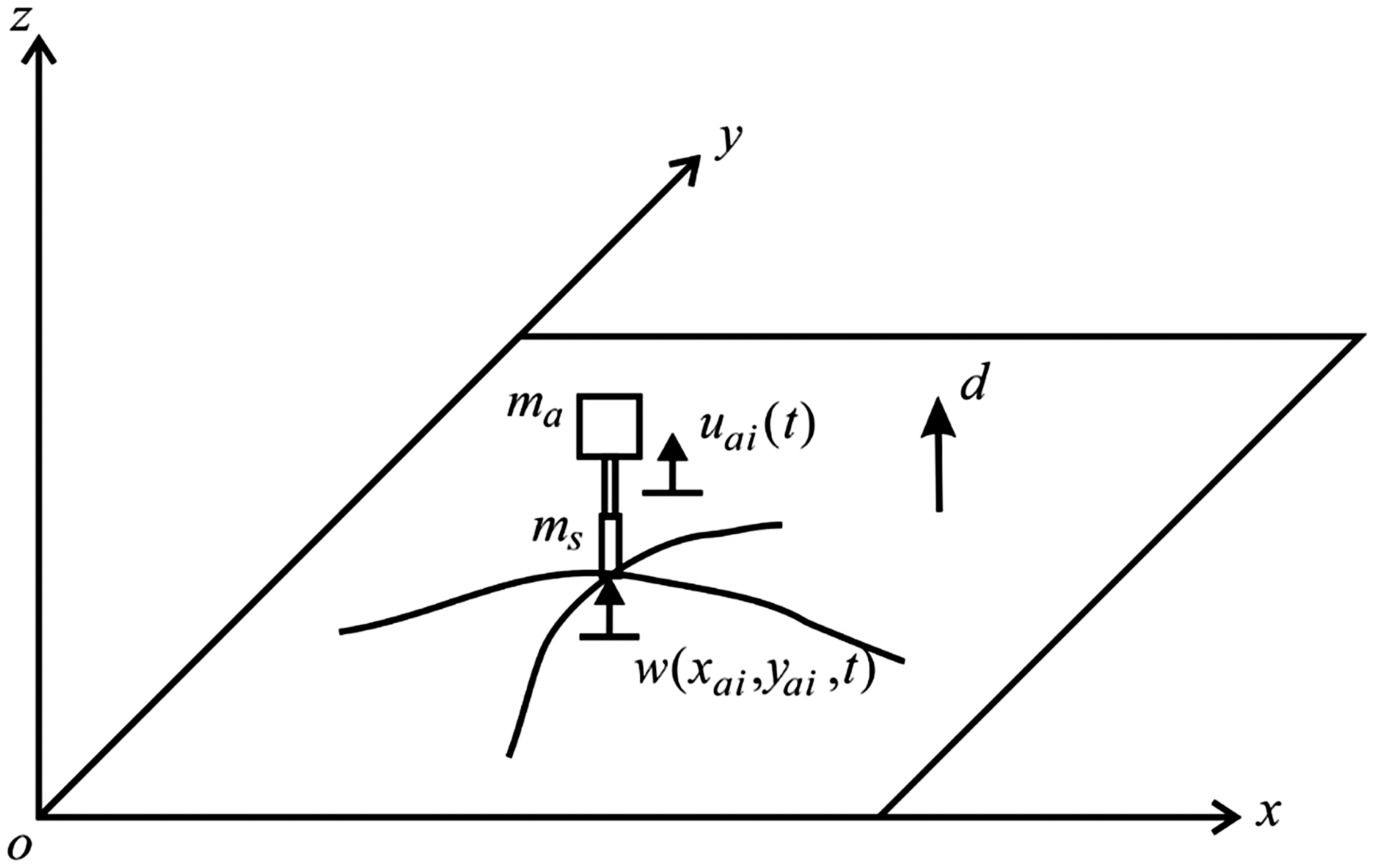
Rectangular plate with AMD.
The assumed mode method is used to express the deflection of the plate as


Kinetic and potential energies of the rectangular plate can then be expressed as follows
25












Therefore, instead of integrating
For an all simply-supported plate, the eigenfunction of a simply-supported beam
25
can be used.

Detailed expressions of matrices given in equation (5) have been described by Kwak and Yang. 26
Kinetic energy of moving and supporting masses of the AMD located at


Hence, the kinetic energy of all AMDs can be expressed as


Using kinetic and potential energies given by equations (3) and (10), equations of motion for this system including disturbance can be written as



Free vibration problem results in the following eigenvalue problem.

By solving the eigenvalue problem, we can obtain the eigenvector matrix



In deriving equation (17), modal damping was assumed.
Displacement at the mounting point can be written as

Hence, vector equation for displacement measurement can be expressed as


MIMO modal-space NAF control
There are always more natural modes than available sensors. It is not desirable to control all modes with only a few AMDs. Let us consider a case in which the same number of AMDs as the number of natural modes to be controlled is used. Hence, we may write



The MIMO modal-space NAF control for equation (22) can then be designed as



Let us neglect residual modes for the control design, then equation (28) can be derived from equation (21).

Of course,

Combining equations (25) and (29), we can obtain the following

Hence, the stability condition can be obtained as

The stability condition, equation (31), is static, meaning that the stability does not depend on frequency. Equation (31) also implies that the stability is guaranteed if the gain matrix is small enough.
By using equations (25), (27), and (28), the MIMO modal-space NAF controller using the acceleration measurement can be written as

However, control and observer spill over problems can occur because we take only parts of

Hence, higher uncontrolled modes are disturbed because of spill over problems. It should be noted here that positive position feedback (PPF) 27 control does not cause this kind of spill over problem.
In addition, modal displacements to be controlled can be calculated based on measured relative displacements of the plate at positions of AMDs. Hence, we may write




Equations (36) and (37) represent fully coupled equations of motion with MIMO modal-space NAF control that include both controlled and the uncontrolled natural modes. Combined equations can be written in matrix form as

Hence, the stability condition becomes

The stability condition given by equation (39) when considering control and observer spill overs are still static. However, it tells us that the gain should be small enough to satisfy this condition.
Decentralized MIMO NAF control
The control law given by equation (32) represents a fully coupled MIMO modal-space NAF controller. This implies that modal accelerations are computed from accelerations at each point, and the modal control is then converted into the real command using matrix computations. For simplicity, one can design each AMD to cope with each natural mode in a decentralized way. Hence, we may write

Equation (40) implies that the desired displacement of the AMD is calculated by the acceleration measured at that point, and each AMD is assigned to tackle a certain mode. Combining equations (17) and (40), we can obtain

Hence, the stability condition can be obtained as

The stability condition, equation (42), is also static. Equation (42) implies that the stability is guaranteed if the gain matrix is small enough. In addition, control or observer spill over problems would not occur in this case.
Using equation (40), the decentralized MIMO NAF controller using the acceleration measurement can be written as

Unlike the fully coupled MIMO modal-space NAF controller given by equation (32), the decentralized MIMO NAF controller does not require matrix computation. Thus, it is simple to use.
Numerical results
As a numerical example, a rectangular aluminum plate having
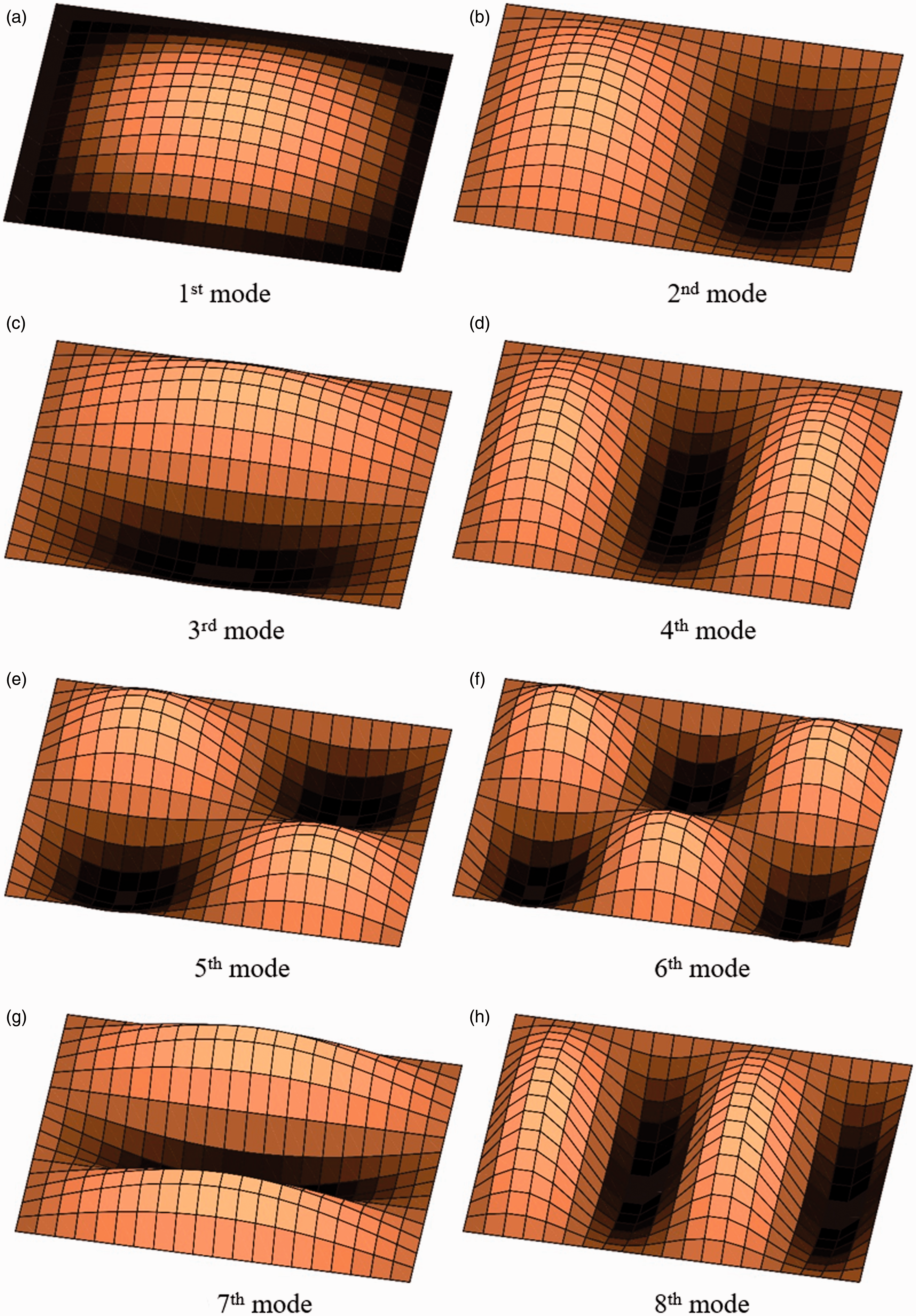
Natural modes of a plate without AMDs: (a) first mode, (b) second mode, (c) third mode, (d) fourth mode, (e) fifth mode, (f) sixth mode, (g) seventh mode and (h) eighth mode.
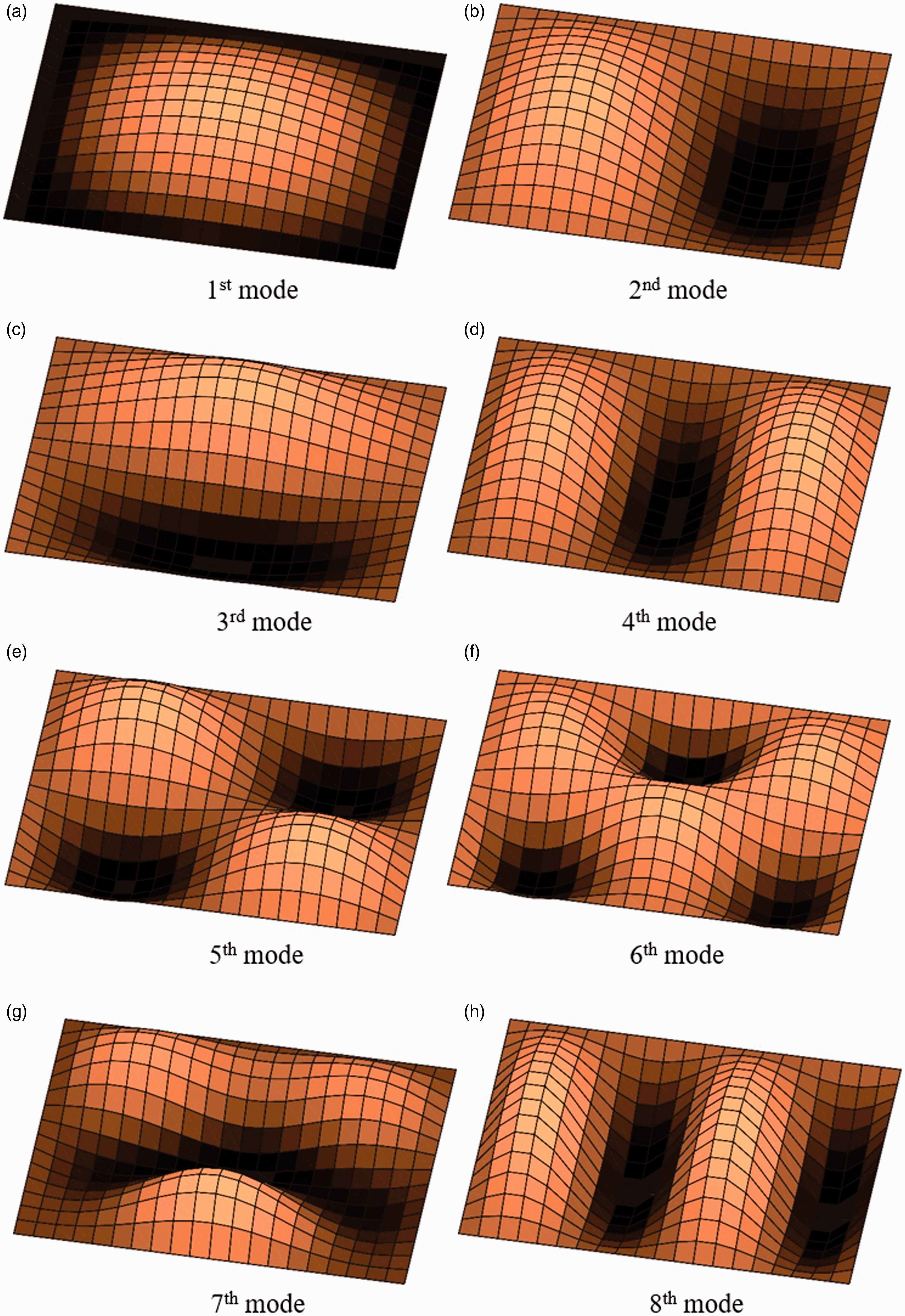
Natural modes of a plate with AMDs: (a) first mode, (b) second mode, (c) third mode, (d) fourth mode, (e) fifth mode, (f) sixth mode, (g) seventh mode and (h) eighth mode.
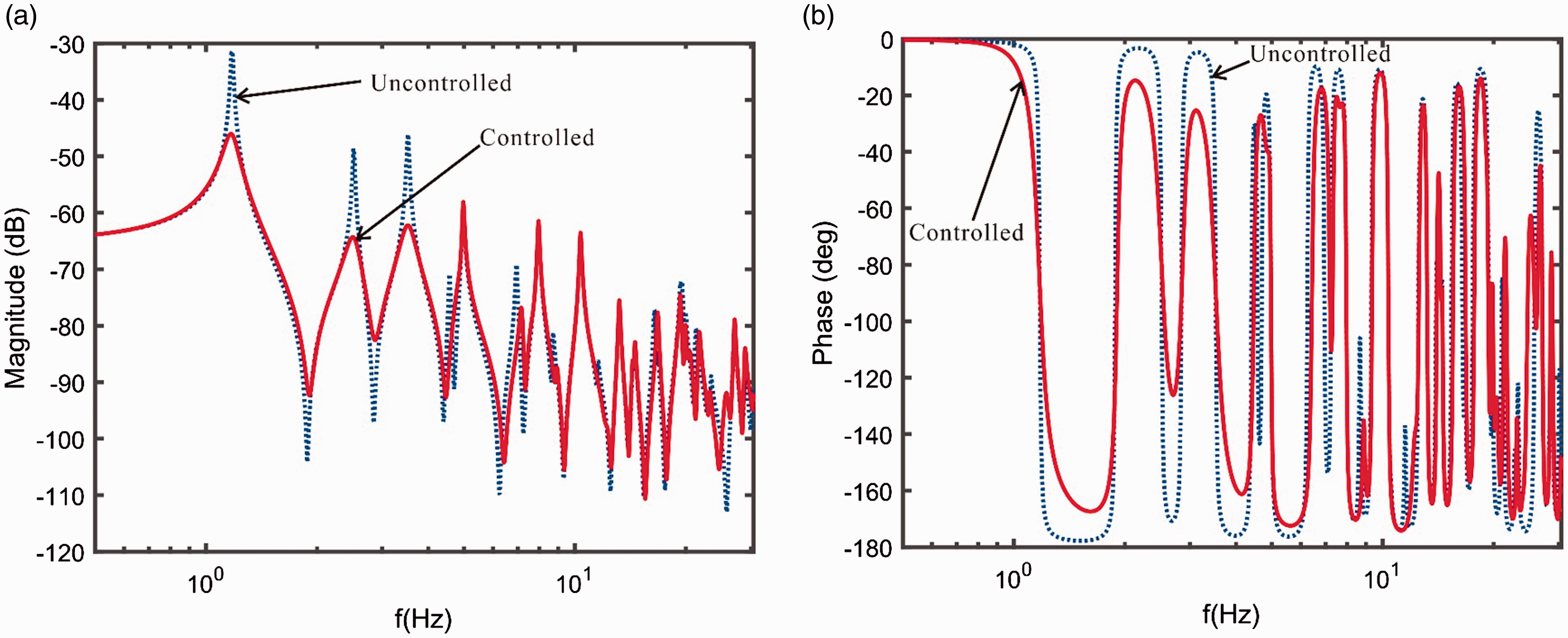
Frequency response function by MIMO modal-space NAF controller: (a) magnitude and (b) phase.
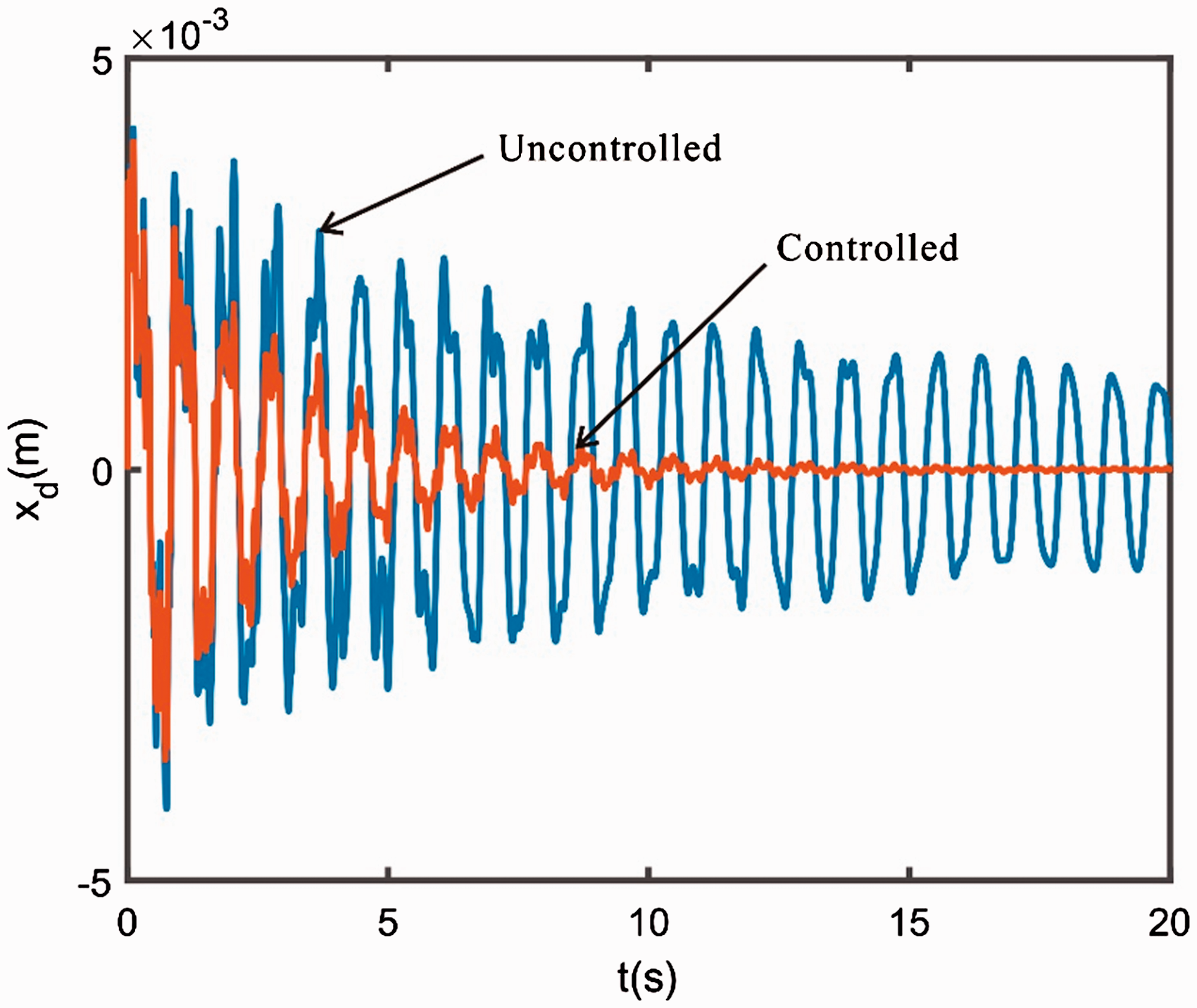
Impulse response by MIMO modal-space NAF controller.
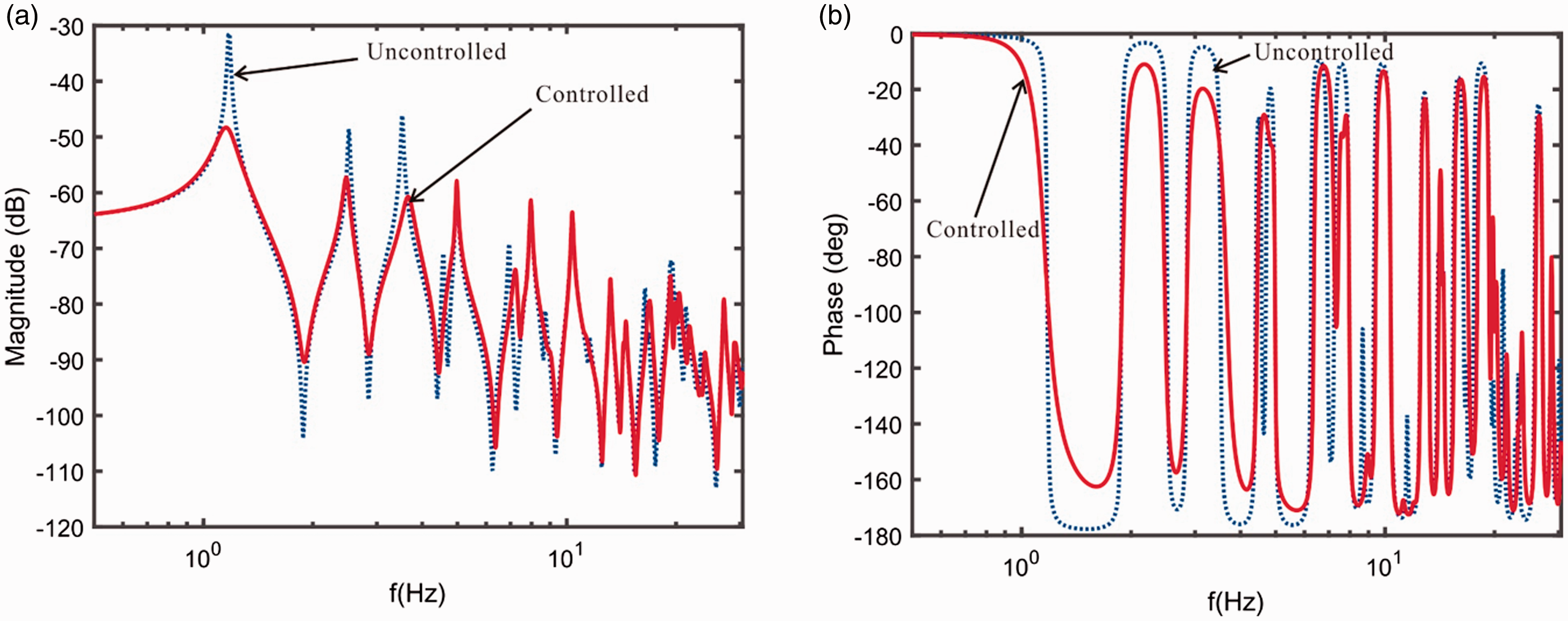
Frequency response function by decentralized MIMO NAF controller: (a) magnitude and (b) phase.
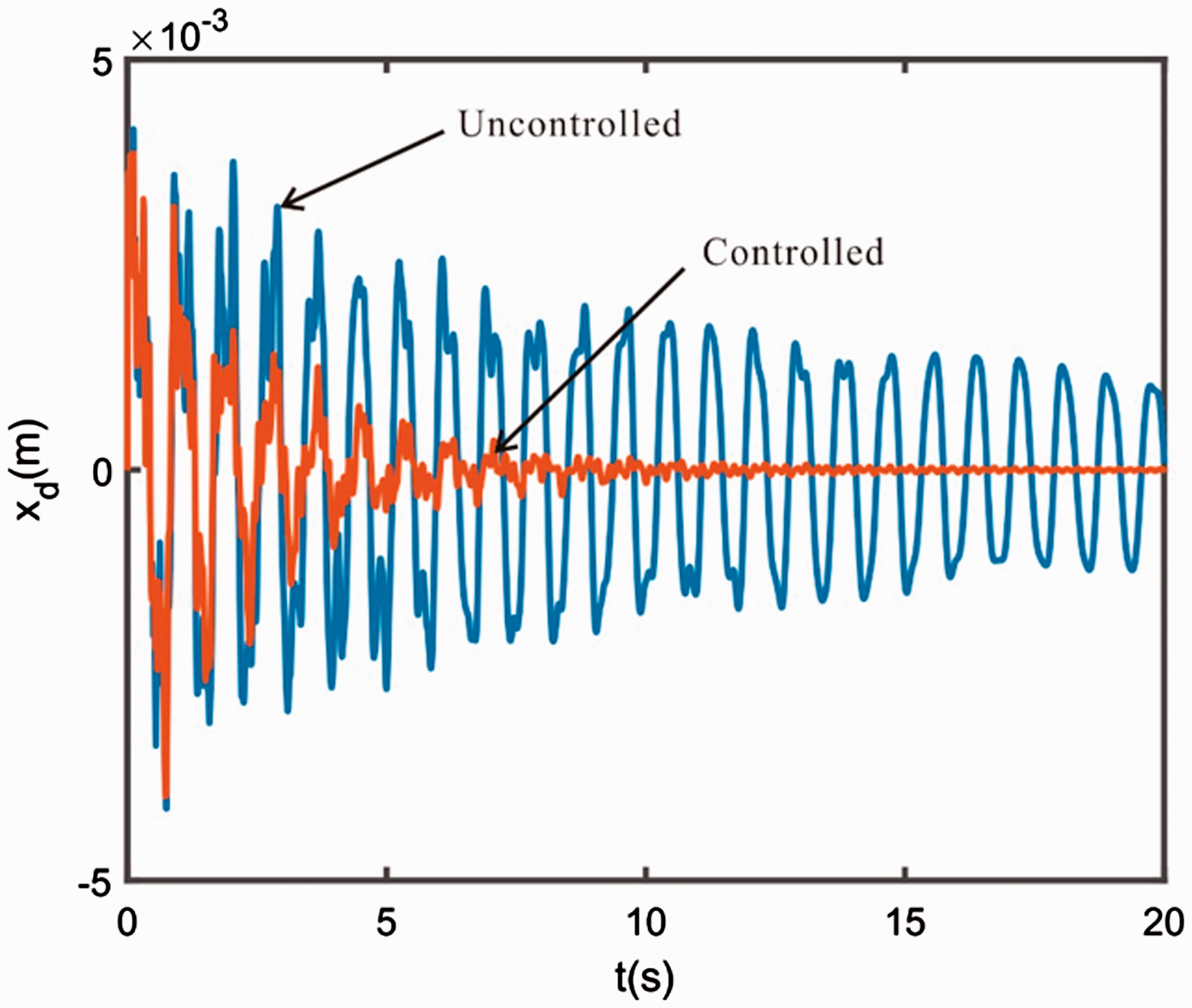
Impulse response by decentralized MIMO NAF controller.
Conclusions
In this study, vibrations of a rectangular plate are suppressed by using AMDs and NAF control. It was assumed that the AMD could track the desired displacement. The NAF controller uses accelerometer signal directly. Thus, it does not require an additional algorithm to compute velocity or displacement from the acceleration signal.
Two types of NAF controllers were proposed. One was the MIMO modal-space NAF controller and another was the decentralized MIMO NAF controller. The MIMO modal-space NAF controller was designed in modal space. The control command was then converted into a real command. It is a fully coupled controller. It can be used to selectively control damping of a target natural mode. On the other hand, the decentralized MIMO NAF controller was designed without matrix computation. However, the AMD operated by a decentralized MIMO NAF controller was responsible for suppressing only the assigned natural mode.
The MIMO modal-space NAF controller inherently had control and observer spill-over problems. Because modal coordinates were estimated from sensor measurements, control that suppressed a certain mode might have undesirable effects on higher modes. In this study, control and observer spill over problems that could occur when using MIMO modal-space NAF control were investigated theoretically. The stability was also checked. It was found that control and observer spill-over problems could be overcome as long as the gain matrix was kept small.
The decentralized MIMO NAF controller has a practical advantage over the MIMO modal-space NAF controller because it does not require matrix computation. In this study, the stability of the decentralized MIMO NAF controller was checked and found to be effective as long as the gain matrix was small, as in the case of the MIMO modal-space NAF control. Numerical results showed that both NAF controllers were effective in suppressing vibrations.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the research program of Dongguk University-Seoul, Korea.