
Abstract
Aviation axial piston pump is an important energy conversion component in aircraft hydraulic system, and the study on the nonlinearity of key operating mechanism is very necessary for improving the reliable operation of the pump. Addressing the aviation axial piston pump, this article analyzes nonlinear dynamic characteristics of the center spring return mechanism by using theoretical analysis and numerical simulation. Firstly, mathematical models of oil-film forces of slipper/swash plate pair and cylinder/port plate pair are derived. Then, based on the nonlinear dynamic theory, some specific theoretical analysis methods such as Lyapunov index spectrum, bifurcation diagram, time series, phase plane portrait, Poincaré map, and power spectrum are used to carry out the numerical simulation of nonlinear dynamic behaviors. The result indicates that characteristics of the center spring can reveal the reason for the nonlinear vibration of the center spring return mechanism. Meanwhile, the behavior of the oil thickness of slipper/swash plate pair is in the periodic and steady motion, and the variation of the oil thickness of cylinder/port plate pair is in chaotic vibration, which establishes the theoretical foundation of the aviation axial piston pump for the traceability and suppression of vibration. The obtained results are of important guidance significance for optimal design and dynamic control of the center spring return mechanism of aviation axial piston pump.
Introduction
In order to improve the power density of aviation axial piston pump, it is a great challenge to make the pump at a high speed and high-pressure working condition, when considering the local elastic-plastic stress deformation and thermal deformation of the rotating component.1,2 The aviation piston pump is in nature a complex nonlinear, time-variant, and multi-variable system, which contains the correlation among hydraulic system, mechanical system, and the electric control system.3,4 The anomalies and failures of the center spring return mechanism (CSRM) are often caused by nonlinear vibration, noise, leakage, impact and so on,5,6 which seriously affect the motion stability and control precision of aviation axial piston pump. A specific and accurate mathematical model of CSRM can be beneficial to predict nonlinear dynamic characteristics and calculate practical operation issues of aviation axial piston pump. Therefore, it is significant to study nonlinear dynamic behaviors of CSRM of aviation axial piston pump.
In recent years, nonlinear dynamic behaviors of rotating machinery components of hydraulic system have been investigated by many scholars, 7 mainly including servo hydraulic cylinder and control valve. Jerrelind and Stensson 8 summarized previous works on nonlinear dynamics of engineering products. Wang et al. 9 investigated nonlinear characteristics of hydraulic cylinder. The result shows the creeping motion in hydraulic cylinder is caused by characteristics of soft spring and the self-excited vibration is given to the nonlinear friction force. Zhu et al.10,11 analyzed the nonlinear dynamics behavior of the electrohydraulic servo system. This research indicates that the variation of excitation force, spring force nonlinear term, and damping can result in complicated nonlinear dynamic behaviors. In addition, Hayashi 12 investigated the instability and chaotic phenomenon occurring in a pilot-type poppet valve circuit. Licskó 13 established a nonlinear dynamic mathematical model of the single stage relief valve embedded within a simple hydraulic circuit. Meanwhile, chaos suppression and nonlinear controller are widely analyzed in nonlinear system. Lin et al. 14 used a sliding mode control to make the chaos suppression in coronary artery chaotic system. Yau and Yan 15 proposed a proportional-integral switching surface to assign the performance of the systems in the sliding mode motion easily, and the result shows the obtained controller can achieve high precision and long-range positioning performance and robustness by the proposed control approach.
In this study, by establishing mathematical models of oil-film forces of slipper/swash plate pair and cylinder/port plate pair, the dynamic model of CSRM should be built, which is the precondition of investigating the nonlinear dynamic characteristics of CSRM. Koc and Hooke 16 discussed the stress sustained by slipper pair in axial piston pump. The result shows that the compression force of the slipper is supported by the static pressure, and the residual compression force is balanced by the dynamic pressure. Hashemi et al. 17 measured the friction force between slipper and swash plate from a newly developed axial piston pump. Xu et al. 18 derived a numerical mode of oil-film forces in piston/cylinder pair which was taking influences of roughness, elastic deformation of piston, and pressure–viscosity effect into consideration. Zhang et al. 19 investigated a new dynamic seven-stage model for the thickness prediction of the film of cylinder/port plate pair in axial piston pump.
So far, these present literatures about the nonlinear dynamic characteristics of hydraulic components and system mainly focus on hydraulic servo cylinder, servo valve and servo system; however, the nonlinear dynamic analysis of CSRM of aviation axial piston pump is also significant but the relevant studies are very poor. Moreover, mathematical models of the extrusion force and thermal wedge force of slipper/swash plate pair and the extrusion force of cylinder/port plate pair are rarely analyzed either. In this work, a mathematical model of CSRM of aviation axial piston pump was derived, and equations of oil-film forces of slipper/swash plate pair and cylinder/port plate pair were built. Then, the nonlinear dynamic characteristics of CSRM would be analyzed by using special identification techniques such as bifurcation, Lyapunov index spectrum, time series, phase plane portrait, Poincaré map, and power spectrum.
The rest of this article was organized as follows. In the upcoming section, the nonlinear dynamic model of CSRM of aviation axial piston pump would be derived. Numerical simulations and results were analyzed by using MATLAB software in “The nonlinear dynamic analysis of CSRM” section. Finally, some concluding remarks were presented in the final section.
The CSRM model and mathematical formulation
The diagram of schematic structure and all forces of CSRM system of aviation axial piston pump are shown in Figure 1. The center spring pushes the cylinder block to the port plate, meanwhile, under the action of center spring force, the push-rod can push the spherical hinge to the back-strake plate through the washer, then the back-strake plate can drive the slipper pair returning.
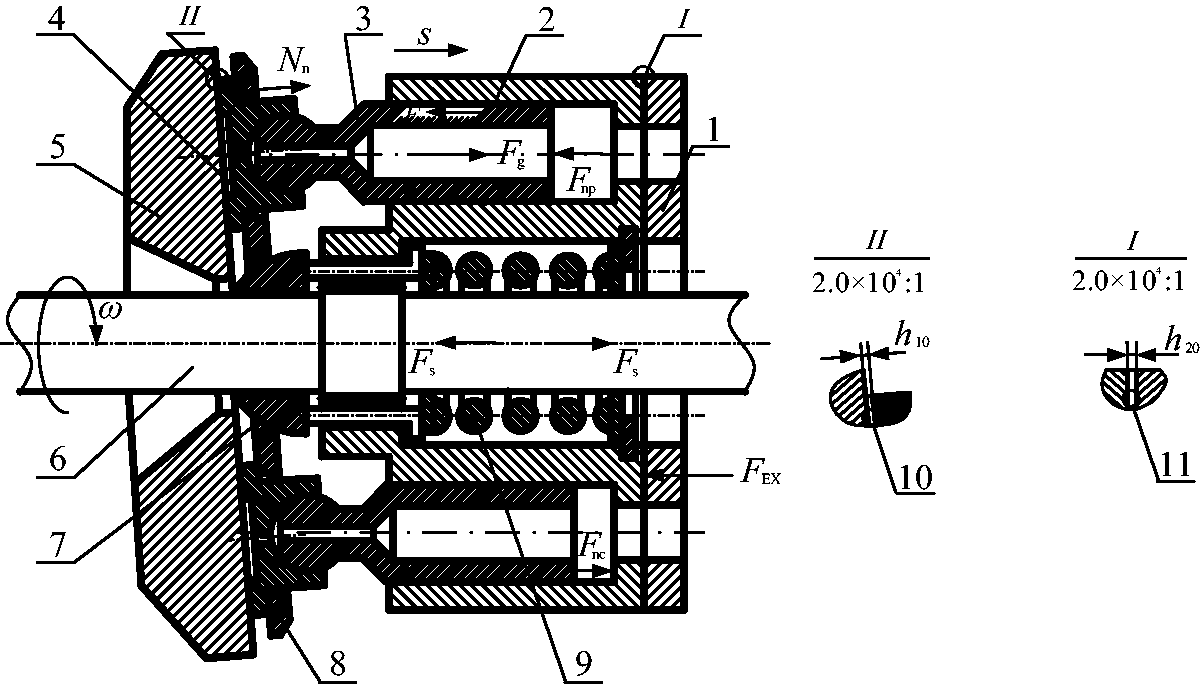
The structure and all forces of the aviation axial piston pump. (1) Port plate, (2) cylinder block, (3) piston, (4) slipper, (5) swash-plate, (6) drive shaft, (7) spherical hinge, (8) back-strake plate, (9) center spring, (10) initial oil-film thickness of slipper/swash plate pair, (11) initial oil-film thickness of cylinder/ port plate pair.
In this work, the CSRM can be equivalently simplified to spring damping system with two mass blocks. The equivalent mass block on the left side of the center spring mainly includes piston, slipper, spherical hinge, push rod, and back strake plate. The equivalent mass block is influenced by the coupling action of multiple forces, mainly including the axial hydraulic pressure, the piston inertia force, the nonlinear spring force, the friction between the piston and cylinder, and the oil-film force of slipper/swash plate pair. The mass block on the right side of the center spring is cylinder. The cylinder is also under the coupling action of multiple forces, including the axial hydraulic pressure, the nonlinear spring force, the friction force and the oil-film force of cylinder/port plate pair. In this study, we can analyze the nonlinear dynamic characteristics of CSRM by researching variations of oil thickness of slipper/swash plate pair and cylinder/port plate pair. The equivalent mass model of CSRM is illustrated in Figure 2.
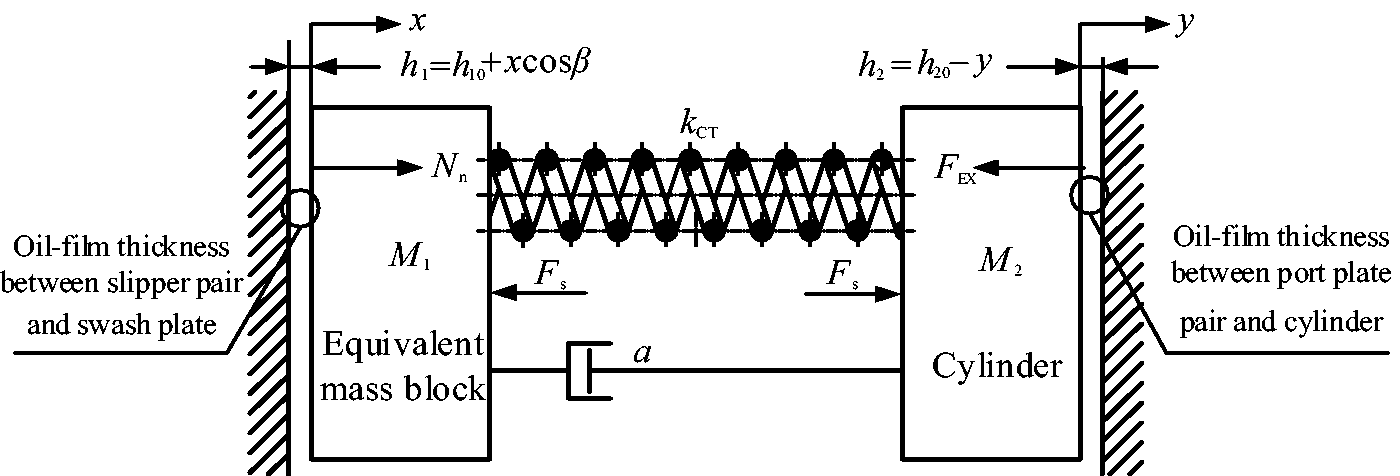
Equivalent mass model of CSRM.
The notations in following equations are given in the Appendix. The differential equation of CSRM can be obtained by Newton’s second law


The piston inertia force

The effect of the nonlinear center spring on the CSRM can be represented by Duffing equation.
21
The center spring force

The diagram of schematic structure and all forces of piston are shown in Figure 3. The friction between the piston and cylinder

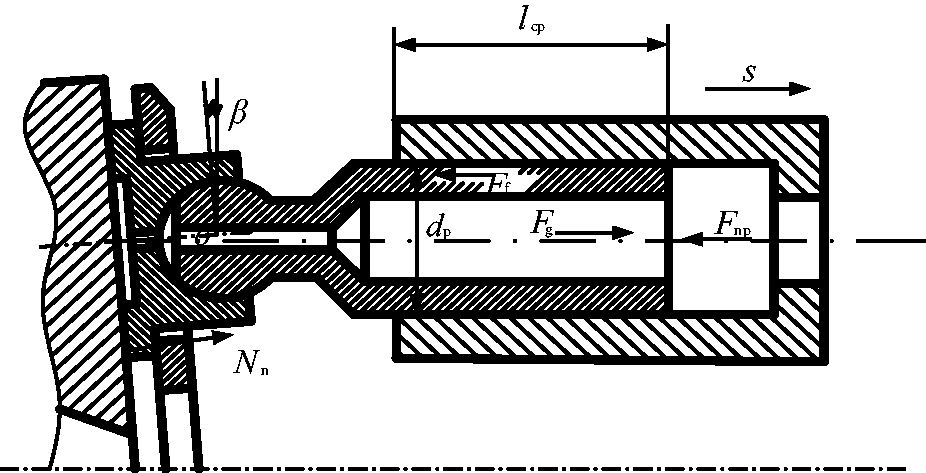
The schematic structure and all forces of piston.
The slipper pair not only makes reciprocating rectilinear movement along the cylinder, but also makes a circular motion on the swash plate at a high speed. These oil-film forces of slipper/swash plate pair should be analyzed in detail, which includes the extrusion force of oil film caused by the oil squeeze, and the thermal wedge force caused by the oil thermal expansion. In this study, there are five pistons in the absorption area, and four pistons in the pressure area. The oil-film force of slipper/swash plate pair

The structure schematic diagram of slipper is shown in Figure 4. When the piston enters the oil pressure zone, there is a certain initial oil thickness of slipper/swash plate pair. Based on Reynolds equation

The structure schematic diagram of slipper.
These constants can be obtained from boundary conditions

If the lateral of slipper is under the atmospheric pressure, that is

In equation (9), the former represents the hydrostatic bearing force under the load stabilization, and the latter represents the extrusion bearing force caused by the oil squeeze in case of load variation.
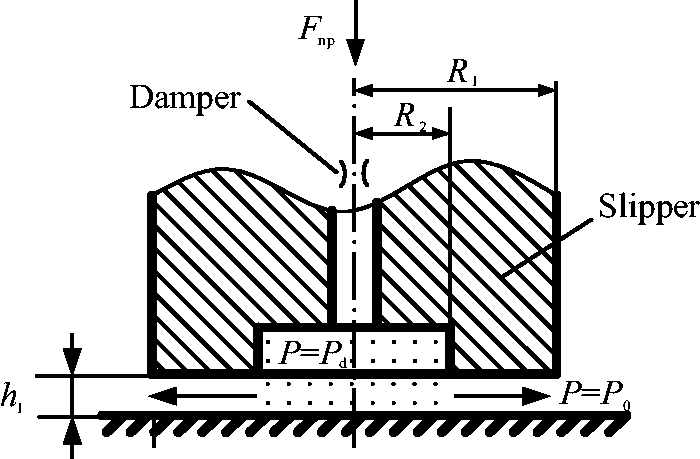
In this work, the slipper pair is parallel to the swash plate, and the loss of leakage and friction power will be converted into energy, then the thermal wedge force will be formed by the oil thermal expansion. The structure of the bottom of slipper is shown in Figure 5.
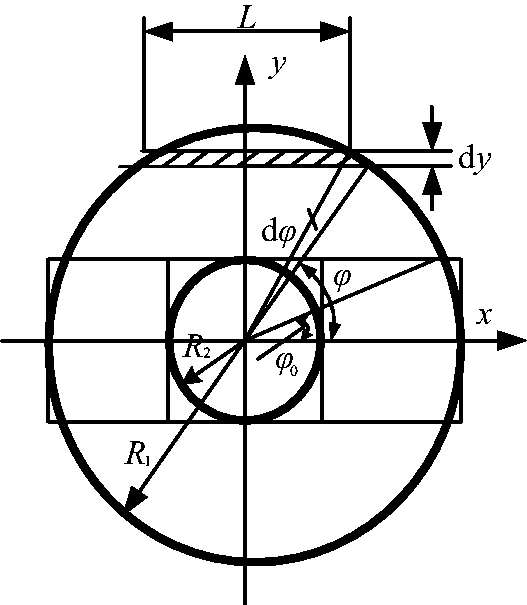
The structure of the bottom of slipper.
For simplicity, the bottom of slipper can be divided into two parts, one part represents sector areas from

Integrating in two areas separately yields


Then, the thermal wedge force

The axial compression force acts on the stage at the bottom of the slipper, which can push the cylinder to the port plate. The equation of axial compression force

In this study, the cylinder block is parallel to the port plate, when the piston enters the oil pressure zone, there is a certain initial oil thickness of cylinder/port plate pair. The structure of port plate is shown in Figure 6.
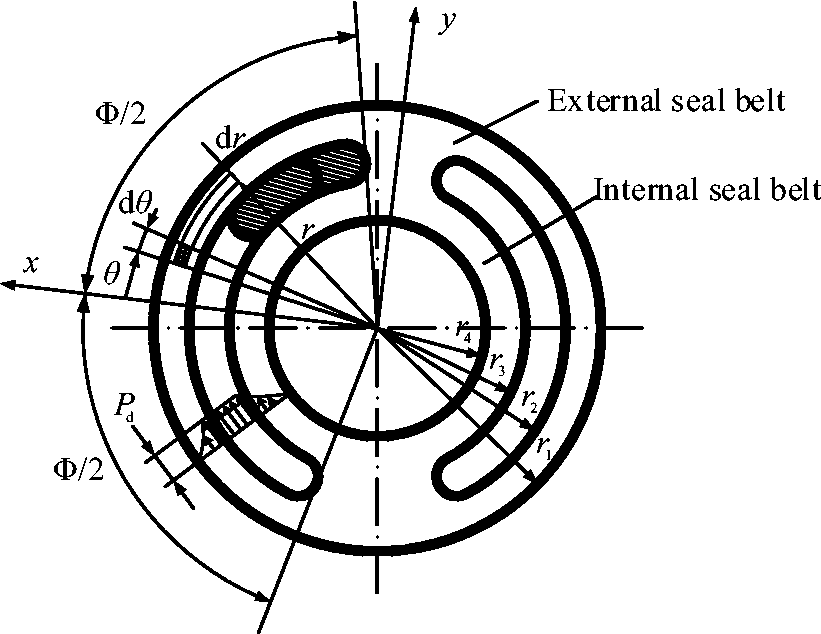
The structure of port plate.
Based on Reynolds equation

The expression of constants can be obtained from boundary conditions
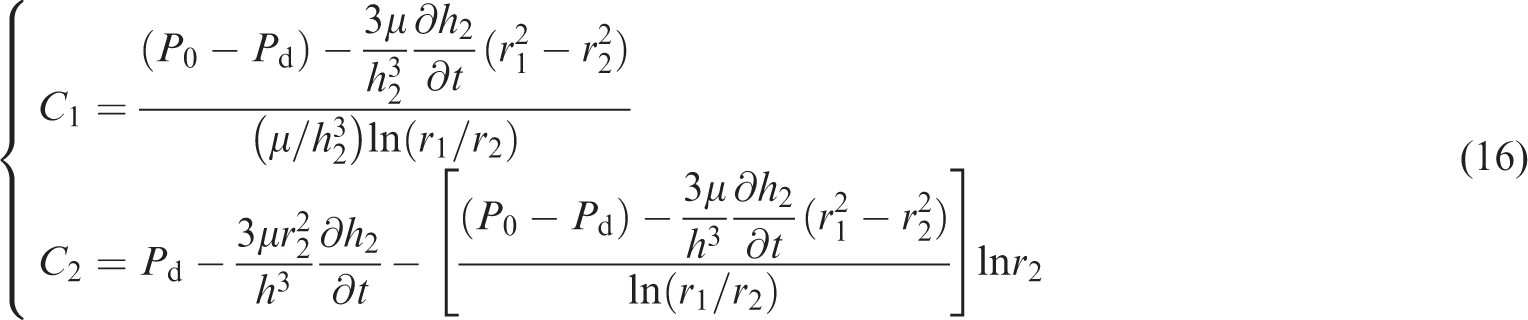
Substituting equation (16) into equation (15), the pressure distribution on the external seal belt of port plate can be calculated as

Then, the expression of extrusion force on the external seal belt of port plate can be obtained as

Similarly, the equation of pressure distribution on the internal seal belt of port plate can be obtained as

The expression of constants can be obtained from boundary conditions
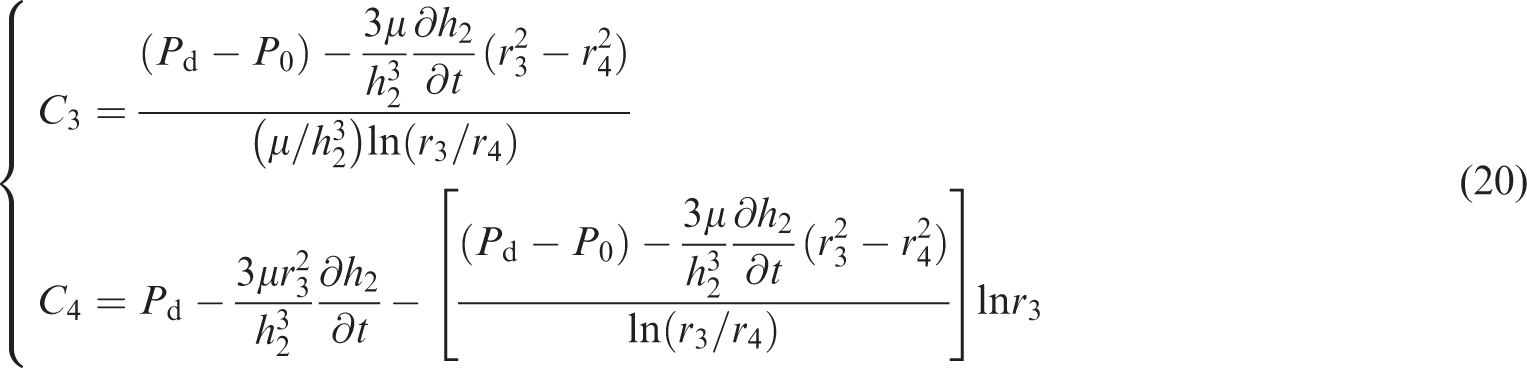
Substituting equation (20) into equation (19), the pressure distribution on the internal seal belt of port plate can be calculated as

Then, the expression of extrusion force on the internal seal belt of port plate can be obtained as

With the hydraulic bearing force in the pressure area of port plate, the expression of the extrusion force can be calculated as

If the lateral of port plate is under the atmospheric pressure, that is

The nonlinear dynamic analysis of CSRM
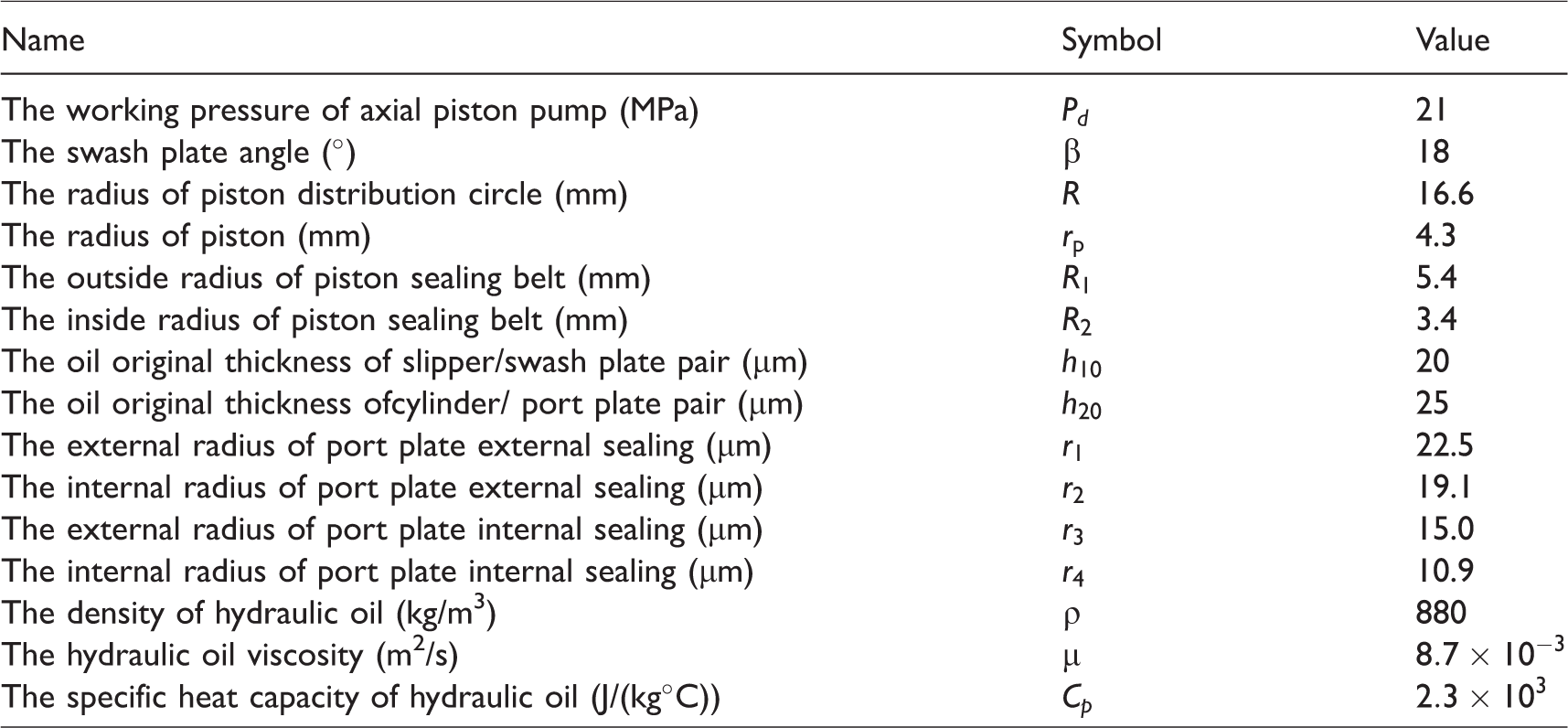
In this section, the dynamic characteristics of CSRM can be researched by nonlinear analysis methods, and the numerical analysis of the differential equation of CSRM system can be solved by a variable step continuous solver based on the Runge–Kutta provided by MATLAB software. Moreover, in order to ensure that datum being analyzed can be in the steady state, the first about one million time series datum should be neglected, and the rest of series datum can be retained to carry out the numerical analysis. The major parameters of CSRM of aviation axial piston pump which were used in the numerical study are shown in Table 1.
The major parameters of CSRM of aviation axial piston pump.
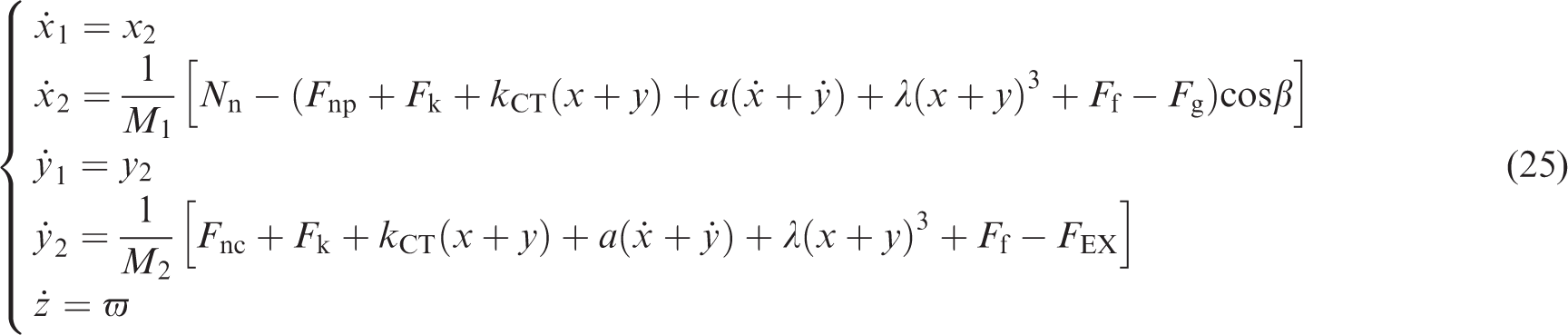
Based on equation (1), the autonomous equation can be constructed, and the state equation of CSRM of aviation axial piston pump can be obtained as
Nonlinear dynamic simulation
In this part, some specific nonlinear methods such as bifurcation diagram, the time series, power spectrum, phase plane portrait, and Poincaré map are used to analyze the nonlinear dynamics of CRSM of aviation axial piston pump. By analyzing the oil thickness variation of slipper/swash plate pair and cylinder/port plate pair, the nonlinear behavior of this system can be investigated in this work. The Lyapunov index provides an effective method to analyze the chaotic motion of CRSM. The Lyapunov index decides the average speed of exponential expansion or contraction in the direction of the beginning deviation
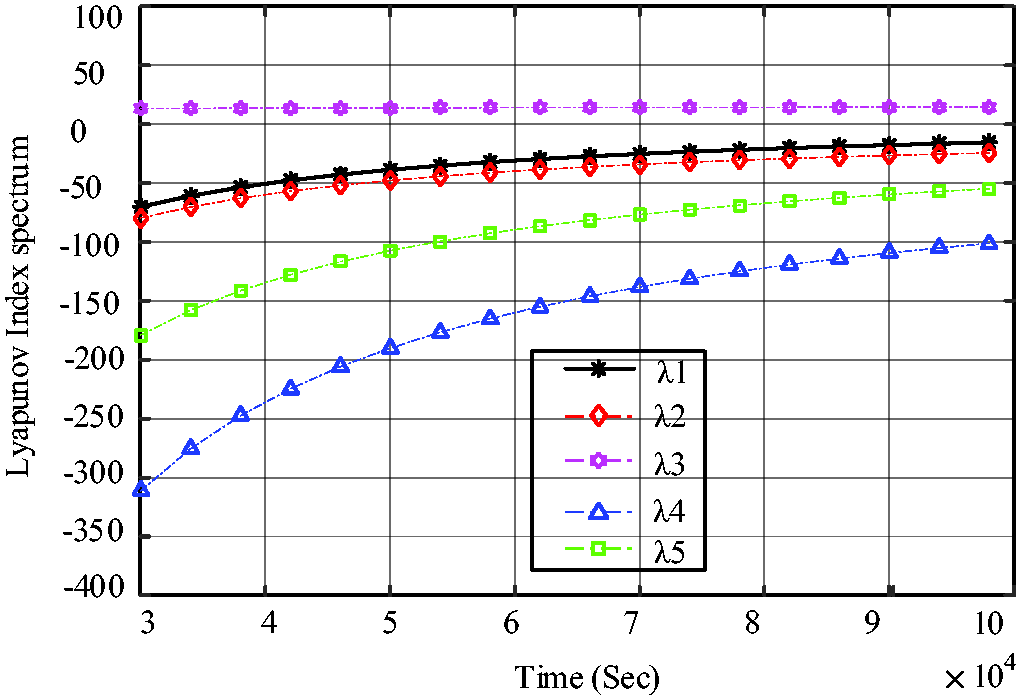
The Lyapunov index of the center spring return mechanism.
In this work, one of Lyapunov indexes is positive, which indicates the dynamic behavior of CRSM is divergence and instability in this direction and the system is sensitive to initial condition. Meanwhile, other Lyapunov indexes are negative, which represents dynamic behaviors of CRSM are convergent and stability in other directions. By analyzing the Lyapunov exponential spectrum, it can be found that dynamic characteristics of CSRM system is in chaotic phenomena at the given speed.
Generally, the bifurcation diagram 24 is used to research the nonlinear dynamics of the system under some controlling parameters. Since the chaotic responses of nonlinear system may be happened in an unstable area of frequency. For the CRSM of aviation axial piston pump, the rotational speed is a significant factor, which can be chosen as the control parameter to research the chaotic response of the system in bifurcation diagram. The bifurcation diagram versus angular velocity is shown in Figure 8.
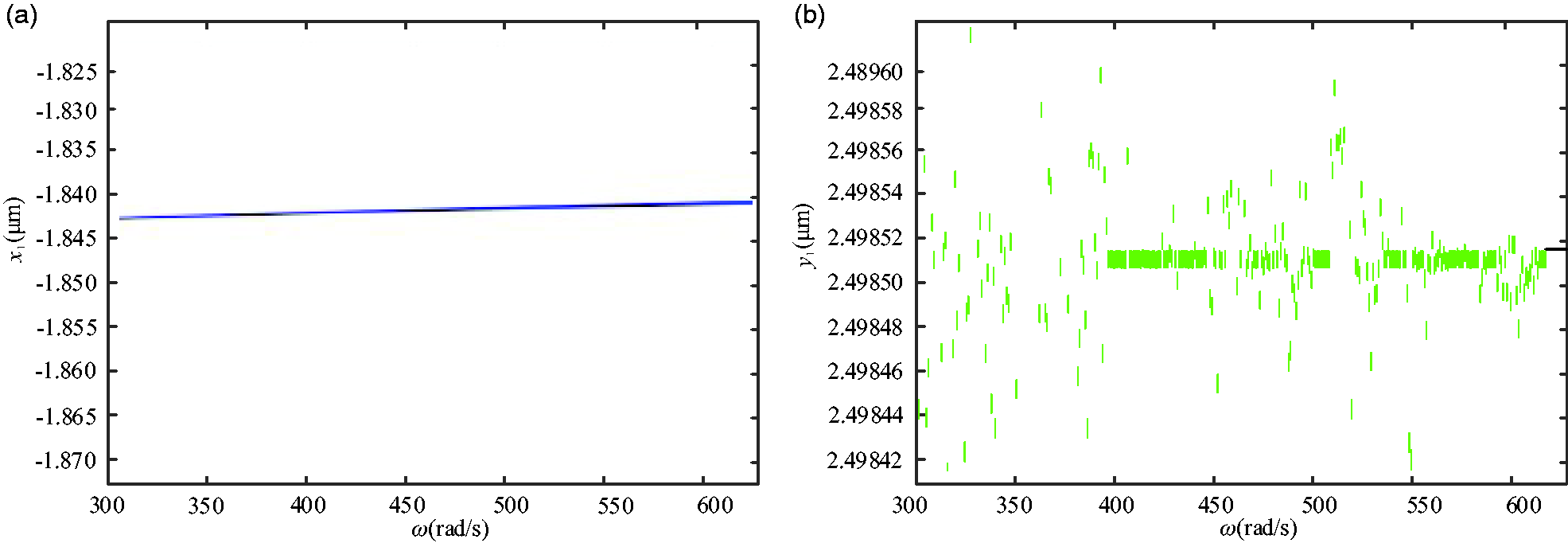
Bifurcation diagram: (a) the oil thickness of slipper/swash plate pair and (b) the oil thickness of cylinder and port plate.
In this simulation, the speed rate is
In this study, the time series, power spectrum, phase plane portrait, and Poincaré map will be used together to analyze nonlinear dynamic behaviors of CSRM of aviation axial piston pump comprehensively. The dynamic behaviors of the oil thickness of slipper/swash plate pair are shown in Figure 9. The dynamic behaviors of the oil thickness of cylinder/port plate pair are shown in Figure 10.
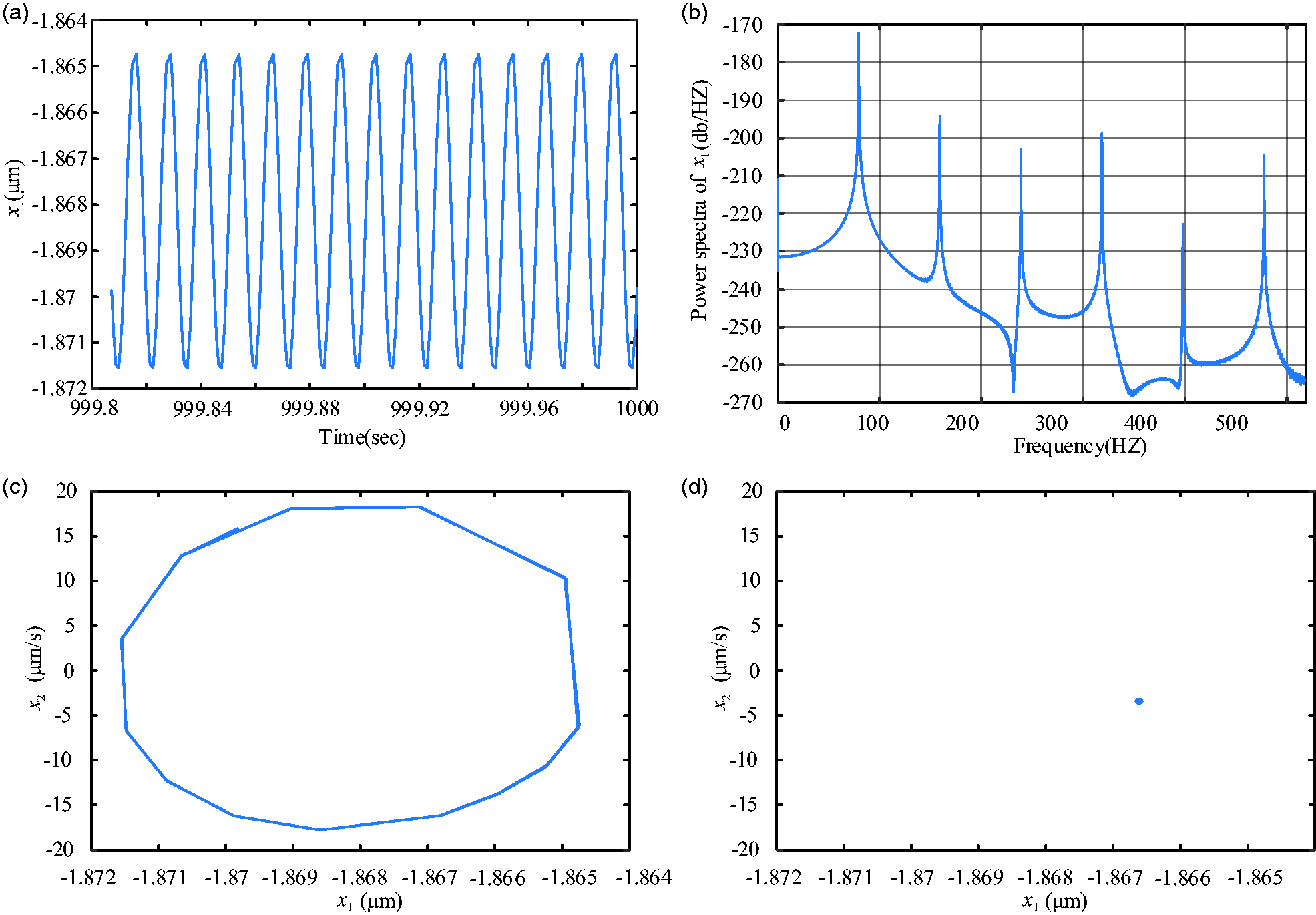
Dynamic behaviors of the oil thickness of slipper/swash plate pair: (a) the time series, (b) power spectrum, (c) phase plane portrait, and (d) Poincaré map.
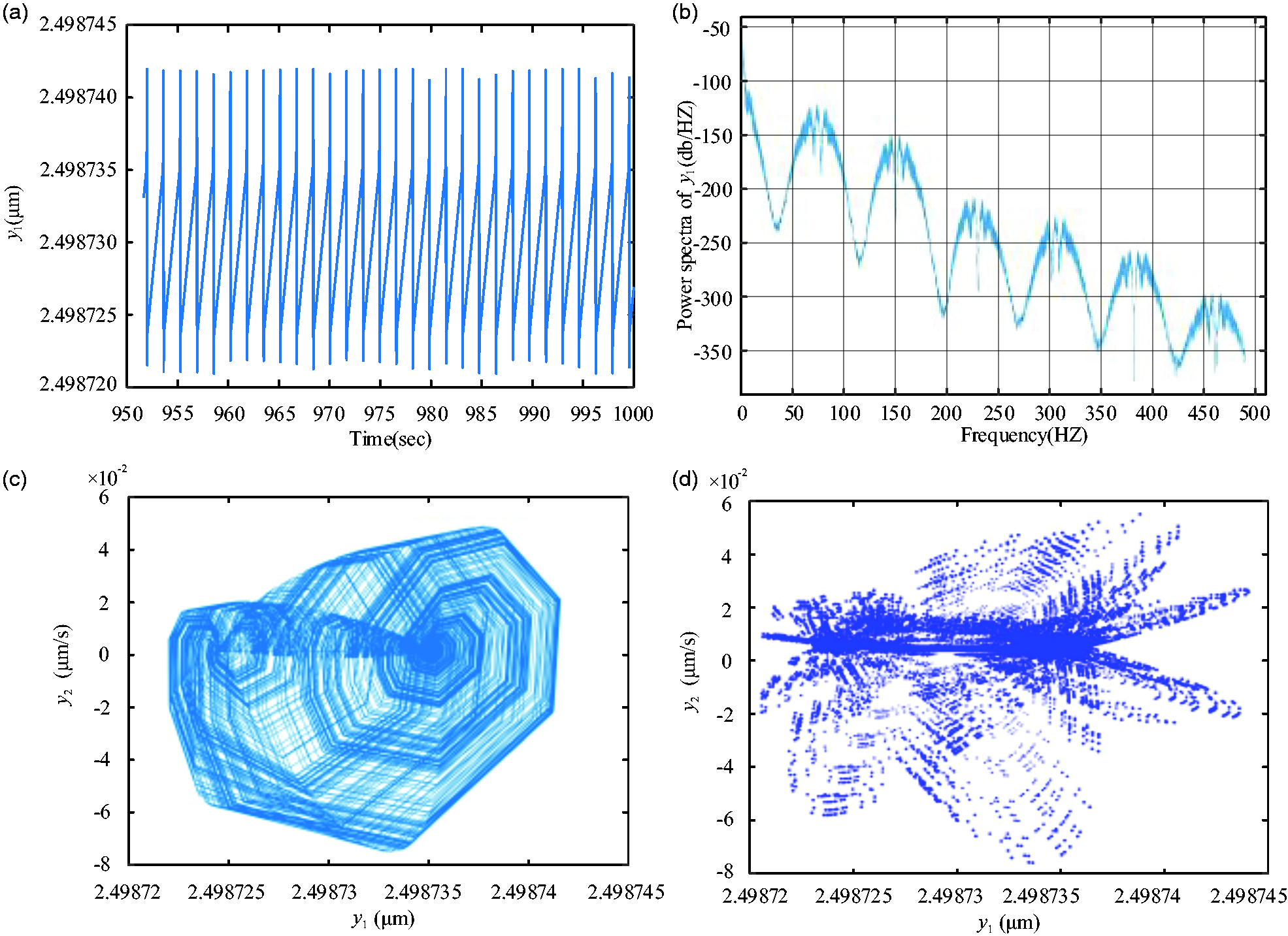
Dynamic behaviors of the oil thickness of cylinder/port plate pair: (a) the time series, (b) power spectrum, (c) phase plane portrait, and (d) Poincaré map.
Nonlinear dynamic analysis
Figure 9 shows the numerical results of dynamic behaviors of oil thickness between slipper/swash plate pair based on time series, power spectrum, phase plane portrait, and Poincaré map, respectively. The time series curve changes periodically during the whole simulation process. The phase plane portrait diagram consists of one curve, which can repeat in a certain region. Meanwhile, peaks appear at the fundamental and doubling frequencies on the power spectrum, and the Poincaré map has one single point. For a periodic motion, there are a few of isolated points in the Poincaré map, For a chaotic behavior, the return points on the Poincaré map will form the geometrical fractal structure.25–27 In conclusion, the behavior of the oil thickness of slipper/swash plate pair is in the periodic and steady motion.
In Figure 10, dynamic behaviors of oil thickness of cylinder/port plate pair can be researched too. There is no obvious regularity in the time series diagram. The phase plane portrait diagram consists of multiple irregular closed curves, and these curves are filled in the whole region. The power spectrum diagram seems continuous or broadband spectrum. At last, the strange attractor in the Poincaré map has the fractal structure. In conclusion, the result indicates the variation of oil thickness of cylinder/port plate pair is in chaotic motion, which establishes the theoretical foundation of the aviation axial piston pump for the traceability and suppression of vibration.
Summary and conclusions
Nonlinear dynamic characteristics of CSRM of aviation axial piston pump are discussed in this work. Mathematical equations of oil-film forces of slipper/swash plate pair and cylinder/port plate pair are derived, including the extrusion force based on Reynolds equation and the thermal wedge force. Through the theoretical analysis and simulation experiment, some conclusions about nonlinear dynamic behaviors of CRSM of aviation axial piston pump can be obtained.
The effect of nonlinear center spring force on the CSRM can be described by Duffing equation. Based on specific nonlinear theories about Lyapunov index spectrum, bifurcation diagram, time series, phase plane portrait, Poincaré map, and power spectrum, nonlinear dynamic characteristics of CSRM can be analyzed. In this work, the variation of oil thickness of slipper/swash plate pair is in the periodic and steady motion. Meanwhile, the motion of oil thickness of cylinder/port plate pair is in chaotic vibration, which leads to the mechanical nonlinear vibration of CSRM. This article can help to predict the nonlinear dynamics of the aviation axial piston pump, and to provide the theoretical basis for the structure design of axial piston pump in the future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: this work was supported in part by the National Key Basic Research Program of China under Grant 2014CB046403 and in part by the National Natural Science Foundation of China under Grant 51475019.