
Abstract
Technology that measures bridge responses when a vehicle is crossing over it for structural health monitoring has been under development for approximately a decade. Most of the proposed methods are based on identification of the dynamic characteristics of a bridge such as the natural frequency, the mode shapes, and the damping. Specifically, many time–frequency domain approaches have been used to extract complex spectrum signatures from the complicated vibrations of a bridge due to the interactions of a vehicle with the bridge, which usually involves nonlinear, nonstationary, stochastic, and impact vibrations. In this paper, a method known as complete ensemble empirical mode decomposition with adaptive noise is applied for the first time to analyze the acceleration response of a bridge to a moving vehicle, and the purpose is to extract the spectrum signature of the vehicle–bridge response for structural health monitoring. The time–frequency Hilbert-Huang transform (HHT) spectrum of the decomposed mode from complete ensemble empirical mode decomposition with adaptive noise is presented. The results are well-correlated with finite element analysis. The advantages of the complete ensemble empirical mode decomposition with adaptive noise method are demonstrated in comparing the data from conventional methods, including power spectra, spectrograms, scalograms, and empirical mode decomposition.
Keywords
Introduction
The use of vehicle–bridge interaction data for structural health monitoring (SHM) has received considerable interest in the last decade.1–6 Compared with traditional bridge health monitoring, a vehicle–bridge interaction data-based approach allows target bridges to be monitored or assessed under operating conditions. In principle, the vehicle–bridge interaction and response have complicated nonlinear features, nonstationary features, and stochastic features. As such, varied spectrum analysis methods have been used to extract the vehicle–bridge response signature. Time–frequency characteristics for vehicle–bridge responses are widely analyzed using various methods including the time–frequency spectrum, the wavelet transform, and the Hilbert–Huang transform.
Time–frequency analysis can effectively reveal the constituent frequency components of nonstationary signals and their time-varying features, as well as transient events such as impulses.7–9 To date, various time–frequency analysis methods have been proposed. However, the inherent drawbacks of these time–frequency analysis methods limit their effectiveness for analyzing complex vibration signals. For instance, linear transforms, such as the short time Fourier transform and the wavelet transform, are subject to the Heisenberg uncertainty principle, i.e. the best time localization and highest frequency resolution cannot be achieved simultaneously. 10 One can only be enhanced at the expense of the other, hence the time–frequency resolution of linear transforms is limited. In addition, the basis in either the Fourier or the wavelet transform is fixed. Therefore, these transforms lack adaptability for simultaneously matching the complicated components inherent in complex vibration signals, such as the fundamental frequency and its harmonics, combined harmonics, chaos, system induced impulses, and other transient vibrations. As a typical type of bilinear time–frequency representation, the Wigner–Ville distribution has the best time–frequency resolution, but it has inevitable cross-term interference for multiple component signals. Such cross-term interference complicates the interpretation of the signal features in the time–frequency domain and makes this method unsuitable for analyzing complex vibration signals. Various modified bilinear time–frequency distributions including the Cohen and the affine class distributions may suppress the negative effects of cross-terms, but they will compromise time–frequency resolution and auto-term integrity.11,12 In comparison with the Cohen and the affine class distributions of fixed kernel functions, the adaptive optimal kernel method can suppress the cross-terms more effectively with better time–frequency resolution. 13 Wigner–Ville and Choi–Williams distributions introduce many distortions due to interference terms and negative components. They also require an extended computational time. Spectrogram better preserves the energy distribution (compared to the wavelet transform), but it has issues with time–frequency resolution and gives rather rough estimates. Wavelet transforms and scalograms provide good results, but they add artifact to frequencies close to zero or close to the edges. Additionally, they distort the energy distribution: high frequencies have less power than the lower ones.7,13
The well-known Hilbert–Huang transform has fine time–frequency resolution and is free of cross-term interference, but it essentially relies on the empirical mode decomposition (EMD) using spline interpolation. 8 It is susceptible to singularities in signals, and it may produce pseudo intrinsic mode functions (IMF), thus masking or interfering with the time–frequency structure of the true signal components. Oscillations of different amplitudes are found in a mode or similar oscillations are encountered in different modes. To avoid this problem, Wu and Huang 14 proposed ensemble EMD (EEMD), which is a method based on the EMD algorithm. The proposed method follows the study of the statistical characteristics of white noise, involves noise-assisted analysis, and adds white noise of a uniform frequency distribution to EMD to avoid mode mixing. However, EEMD brings new problems, as the added white noise is not fully eliminated, and different modes may be produced by the interaction between the signal and the noise.15,16 To resolve these issues, complementary EEMD (CEEMD) was introduced by Yeh et al. 17 After adding positive and negative white noise to the signal, the signal is subsequently decomposed by EEMD. The final IMFs can be obtained by averaging the IMFs produced in the EEMD decomposition for signals with added positive and negative white noise. 18 Nevertheless, this method has a high computational cost and does not resolve the additional modes. To remedy the issues of previous CEEMD methods, complete EEMD with adaptive noise (CEEMDAN) was proposed by Torres et al. 19 This method in principle eliminates the problem of mixing modes of dramatically different periods into a single component, which may occur in previous EMD, EEMD, and CEEMD methods.
Unlike its predecessors, EMD, EEMD, and CEEMD, CEEMDAN resolves the mode mixing problem and provides better spectral separation for the modes. This method reduces computational load and overcomes additional modes. This method has been applied in various communities, and all applications have verified the advantages of this method.19–27 The new CEEMDAN algorithm has the advantage of achieving a complete decomposition with no reconstruction error.
EMD and EEMD methods have been widely applied for bridge health monitoring.28–40 In this paper, CEEMDAN is applied for the first time to analyze the acceleration response of a bridge to a moving vehicle. To demonstrate the effectiveness of the CEEMDAN-based method, we use CEEMDAN to decompose a transient spectrum into serial components. We can use these components to quantify the system properties and improve the performance of spectral discrimination for vehicle–bridge responses, which will demonstrate that this is an effective feature extraction scheme for SHM. The overall performance of CEEMDAN is also compared to state-of-the-art methods including spectrograms, scalograms, and EMD.
Techniques from the field of SHM have emerged as important tools to inspect and maintain bridge system structures. The natural mode monitoring-based approach has been widely investigated and used for SHM. However, vibrations of real bridges under passing vehicle excitation exhibit time-varying, nonlinear, and stochastic features. Conventional spectrum analysis methods such as spectrograms and scalograms have low resolution for this type of complex problem due to cross-term interference, and thus cannot effectively reveal the nonstationary constituent frequency components and their time-varying features such as transient mode mixing. The EMD-based Hilbert–Huang transform has fine time–frequency resolution and is free of cross-term interference. As the most advanced EMD method, CEEMDAN substantially improves EMD. In the present paper, the results show that there is more than 10% difference between the estimated specific transient frequencies from EMD and CEEMDAN. This research offers some insights for bridge agencies that can make use of the Hilbert spectrum of CEEMDAN as a more reliable index than conventional spectra or natural modes for system deterioration estimation and informed-decision making regarding maintenance and repair of bridge systems.
Bridge description
The Chulitna River Bridge is a steel girder composite bridge (Figure 1). It was built in 1970 on a 22° skew. The bridge is 790 ft long with five spans of 100, 185, 220, 185, and 100 ft. The superstructure was 34 ft wide by 6¾ in. thick cast-in-place concrete deck supported by two exterior continuous longitudinal variable depth girders and three interior stringers. The girder stringers are spaced at 7 ft on the center. The interior stringers are supported by a cross frame that is carried by the exterior girders. The cross frame was detailed to transfer dead loads and traffic loads to the exterior girders. Interior stringers were W21×44, and the exterior girders had a variable depth web that varied from 84 in. deep in the first and fifth spans to 108 in. deep in the third spans. Figure 2 shows the pier and span locations. At Piers 2 and 4, the exterior girder web has a haunch depth of 148 in. At Pier 3, the exterior girder web has a haunch depth of 168 in. In 1993, the bridge deck was widened from a 34 ft cast-in-place concrete deck to a 42 ft 2 in. concrete deck made of precast concrete deck panels. The increased load was accounted for by strengthening the variable depth exterior girders and converting the W21x44 interior stringers to an interior truss girder; the W21x44 became the upper chord of the truss.

Chulitna River Bridge.

Two trucks side by side.
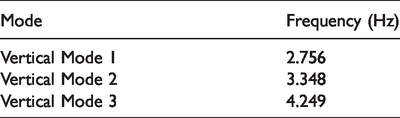
A finite element model of the bridge was developed using the commercial software SAP2000. The bridge trusses were modeled using frame elements, and the deck, stringers, and girders were simulated using shell elements. Detailed modeling and analysis results are included in Xiao et al. 41 The natural frequencies of the first three vertical bending modes are listed in Table 1.
Finite element model results.
Testing of the bridge under passing vehicle
A dynamic load test was conducted on the bridge using two trucks. The trucks were loaded with sand and then the gross weights were measured, which were 82,100 and 80,250 lb. The two trucks were side by side (Figure 2) heading north (to Fairbanks) at 45 mile/h. Figure 3 shows the test trucks. A fiber optic bridge health monitoring system recorded the bridge’s dynamic response.

Load test trucks.
A fiber optic SHM system was installed on this bridge to monitor the bridge’s real-time behavior. 42 The system consisted of five parts: an optical sensing interrogator, a channel multiplexer, optical sensors, a local computer, and a remote computer. The optical sensing interrogator and the local computer are in the control panel at Princess Hotel, which is 1.5 mile away from the bridge site (Figure 4).

Local computer and interrogator.
The fiber optic accelerometer is as accurate and stable as conventional accelerometers. The advantages of fiber optic technology include long-term stability, nonconductive properties, and convenience. The light signal transmits a very long distance with very low signal transmission loss. The fiber optic sensor is made up of glass and a protective cover, and it is free from corrosion, giving it long-term stability. Fiber optic sensors have the advantage that they are nonconductive, which keeps them free from electromagnetic and radio frequency interference. Fiber optic sensors are practical to use in city areas that have serious signal interference. Additionally, fiber optic sensors and cables are very small and light, making it possible to permanently incorporate them into structures. On the other hand, several sensors can be put into one array, which means that one cable works for approximately 10 sensors. Compared with a traditional foil strain gage, which is one sensor that requires two cables, a fiber optic system simplifies cable layout, which shortens installation time and reduces installation cost.
In this study, os7100 (Micron Optics, Inc., Atlanta, GA, U.S.) fiber optic accelerometers were employed. The fiber optic accelerometer is based on fiber Bragg grating technology, and it is compatible with other fiber Bragg grating-based strain and temperature sensors, enabling a comprehensive fiber optic-based sensing network. The sampling frequency of the accelerometers was 250 Hz, and the sensitivity was approximately 16 pm/g. 43 The sensors were mounted on the bottom of the bridge deck to measure vibrations in the vertical direction. Figure 5 shows the fiber optic accelerometers’ location. Those sensors are installed in the middle of each span and located at the bottom of the deck. The sensor’s details are included in Figure 6.

Plan view road deck hidden.
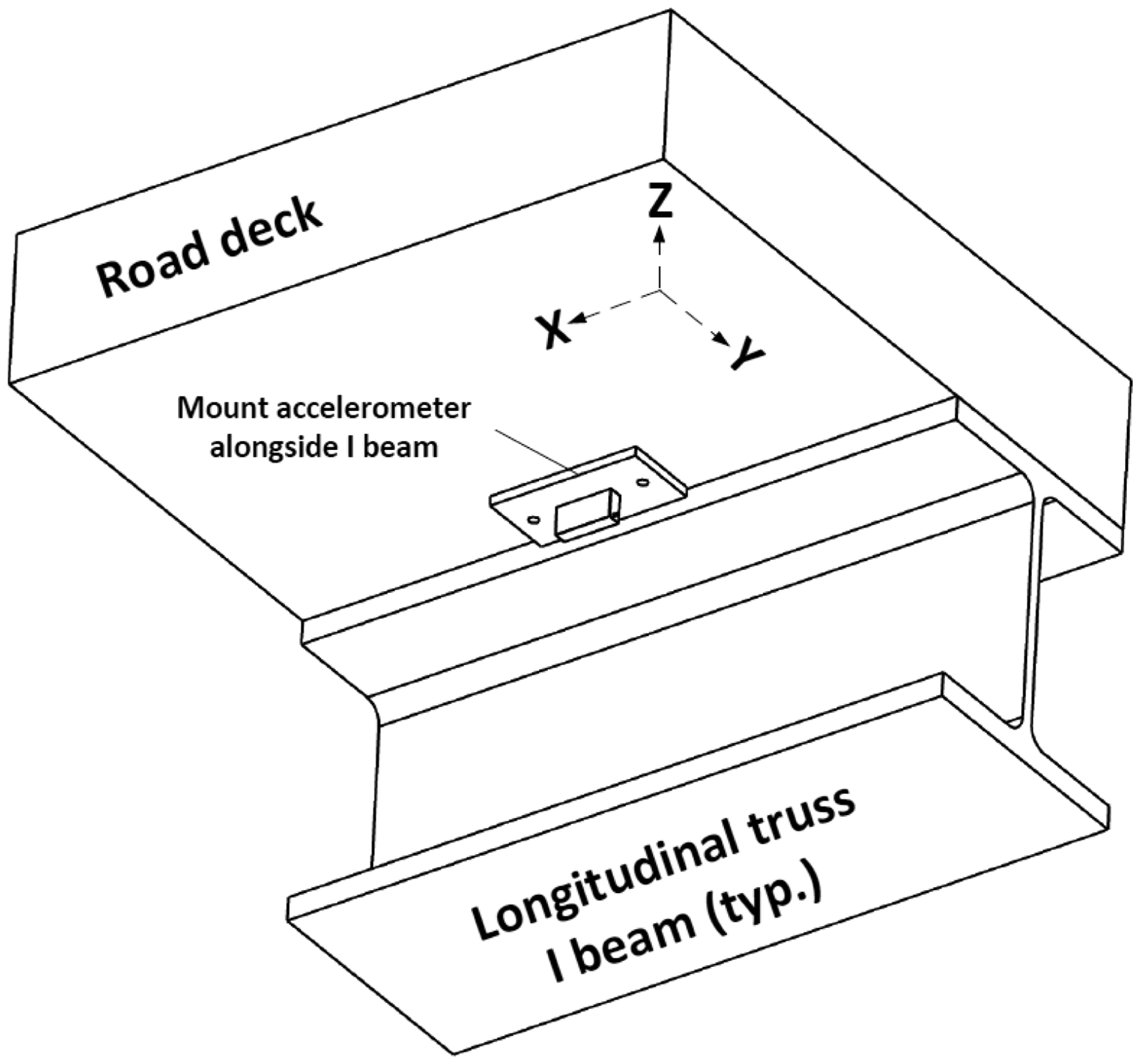
Accelerometer at the bottom of the bridge deck.
Spectrum analysis
In the following analysis, we only chose one representative piece of data for processing. Figure 7 shows the acceleration signal recorded at location number 1 (Figure 5). The trucks entered the bridge approximately 1.6 s, and the bridge remained closed until the vibrations damped out. Figures 8 and 9 show two kinds of power spectrum. Figure 10 shows the 3 D spectrogram, and Figure 11 shows the scalogram.
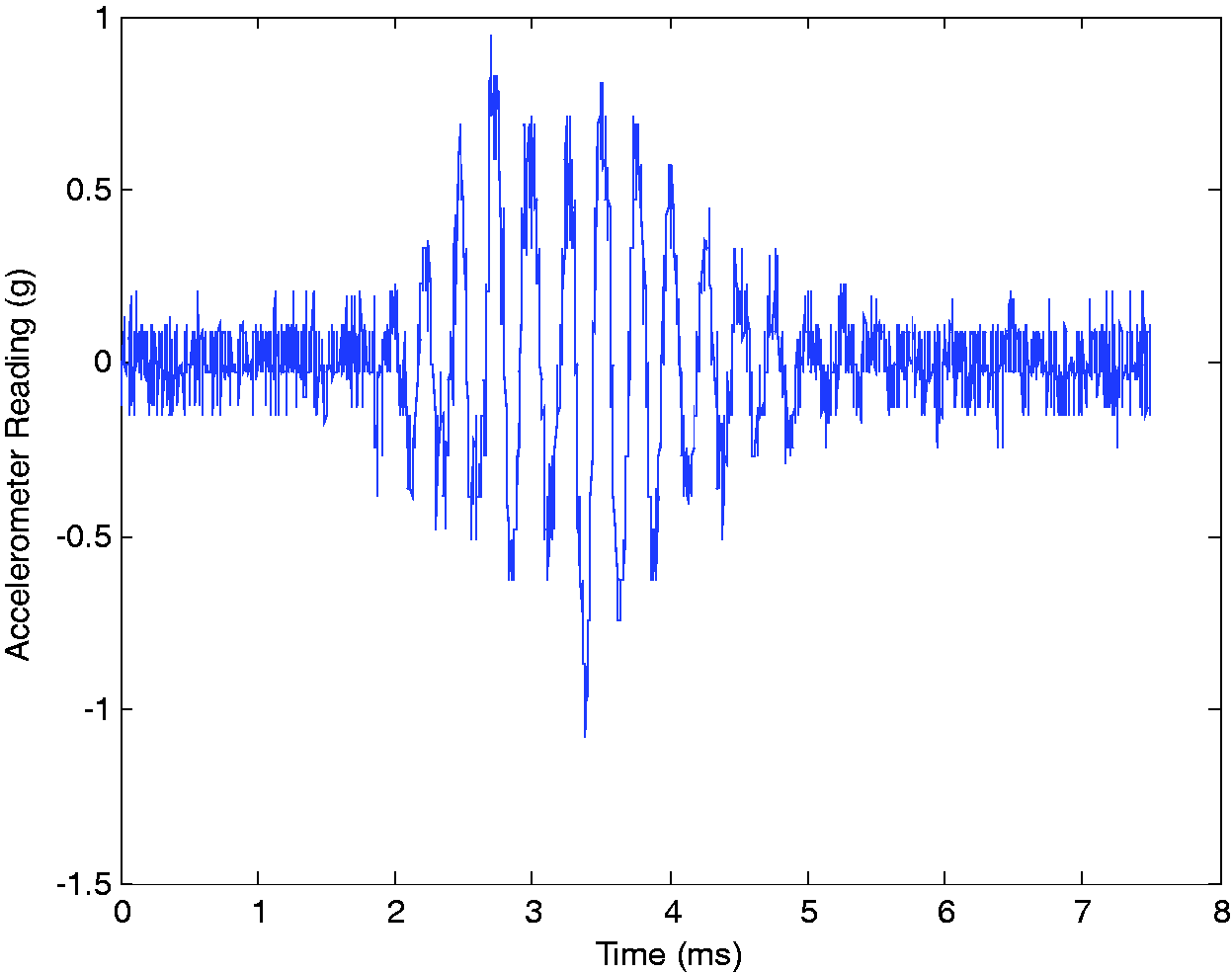
Response of the accelerometer.
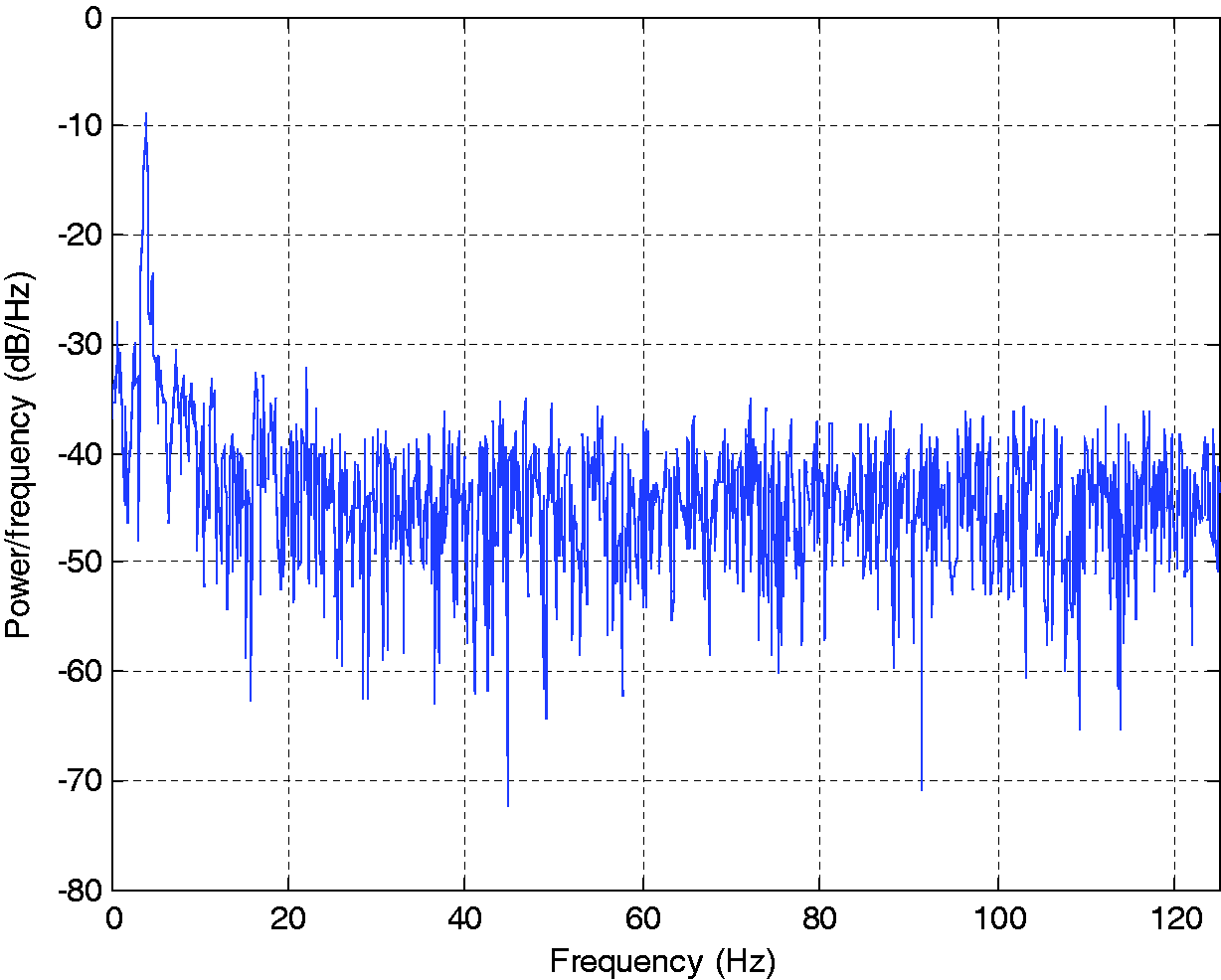
Periodogram power spectral density.
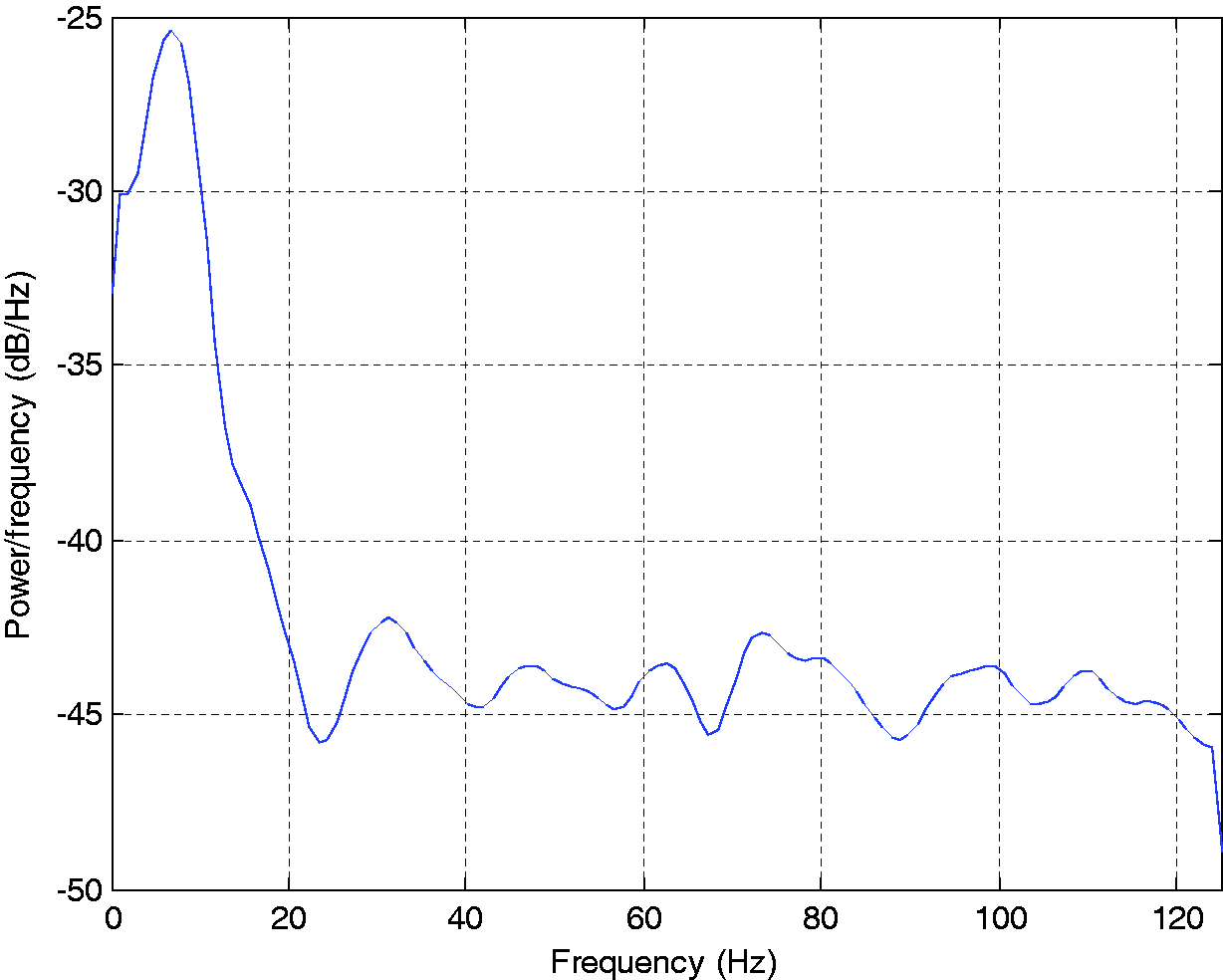
Welch power spectral density estimate.
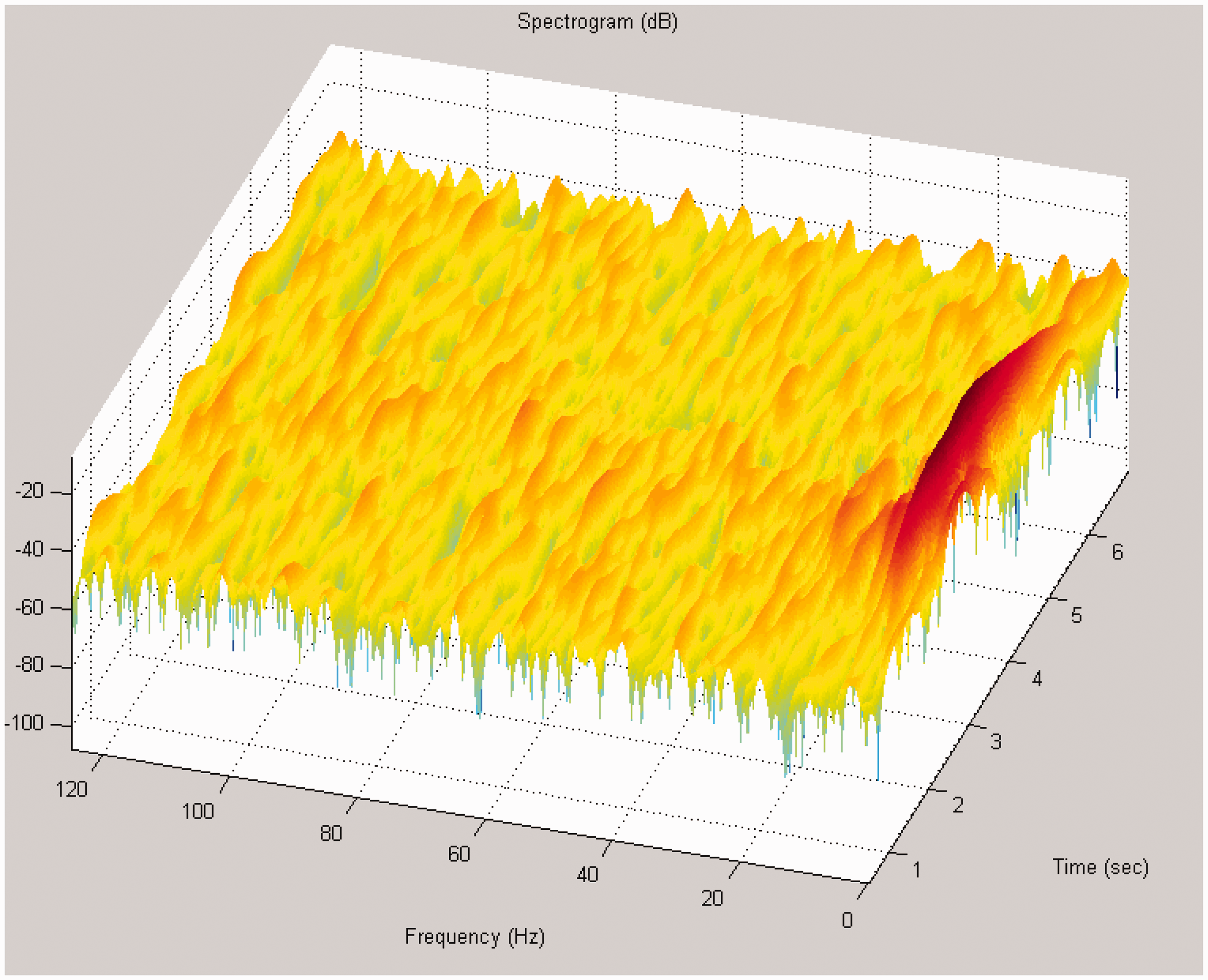
Three-dimensional spectrogram.
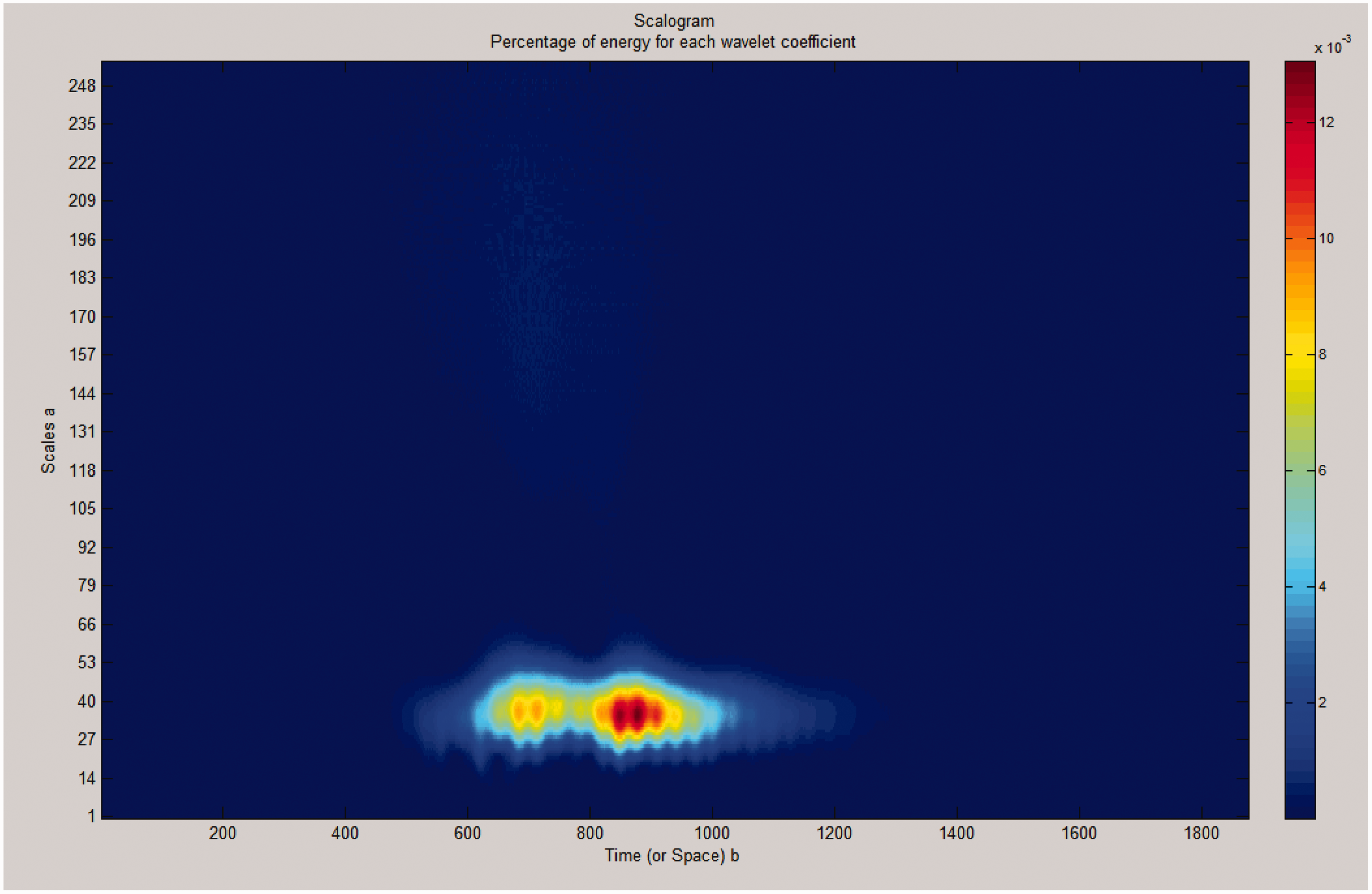
Scalogram.
From these results, we can see that all those kinds of spectrum have merged components that are not correlated with the modes from FEM. Next, we use the EMD method to extract the specific signal and identify the system’s specific spectrum signatures.
EMD analysis and parameter estimates
To decompose the signal into its time–frequency expression as in Figure 7, in the next step, we use an EMD method to decompose the response signal. Before presenting the results, the basic formulations used for EMD are introduced as follows. EMD is a method of decomposing a nonlinear and nonstationary signal into a series of zero-mean amplitude-modulation frequency-modulation (AM–FM) components that represent the characteristic time scale of the observation. A multicomponent AM–FM model for a nonlinear and nonstationary signal, x(t), can be represented as

1) Find the positions and amplitudes of all the local maxima and all the local minima in the input signal x(t). Then, create an upper envelope by cubic spline interpolation of the local maxima and a lower envelope by cubic spline interpolation of the local minima. Calculate the mean of the upper and lower envelopes; this is defined as m1(t). Subtract the mean envelope signal, m1(t), from the original input signal

Check whether h(t) meets the requirements to be an IMF. If not, treat h(t) as new data and repeat the previous process. Then, set

Repeat this sifting procedure k times until h1
k
(t) is an IMF; this is designated as the first IMF

2) Subtract c1(t) from the input signal and define the remainder, r1(t), as the first residue. Since the residue, r1(t), still contains information related to the longer period components, treat it as a new data stream and repeat the above-described sifting process. This procedure can be repeated j times to generate j residues, rj(t), (j = 1, 2, …, n), resulting in
The sifting process is stopped when either of two criteria is met: (1) the component cn(t), or the residue 
Next, apply the Hilbert transform to all IMFs, 
After the Hilbert transform, 
Then, the envelope of every IMF can be given by

In which 
Then, the original signal x(t) can be expressed as

However, some problems in EMD remain unaddressed, among which mode mixing is the most serious. To solve the mode mixing problem, an EEMD algorithm was introduced.
14
Although EEMD alleviates the effect of mode mixing, noise will remain in the corresponding IMF(s) if the ensemble number is small. To ensure a noise-free IMF, a CEEMD algorithm
17
is introduced. The previous method leads to a new problem, which is the high computational load for CEEMD decomposition. To reduce the computational cost and retain the ability to eliminate mode mixing, a CEEMDAN algorithm is proposed.
19
The steps of CEEMDAN decomposition are as follows:
Decompose the signal

where 2. Compute the difference signal
3. Assume 4. For



where 5. Repeat Step 4 until the residue contains no more than two extrema. The residue mode is then defined as

Therefore, the signal x(t) can be expressed as follows

Figure 12 illustrates a flowchart of the CEEMDAN method.
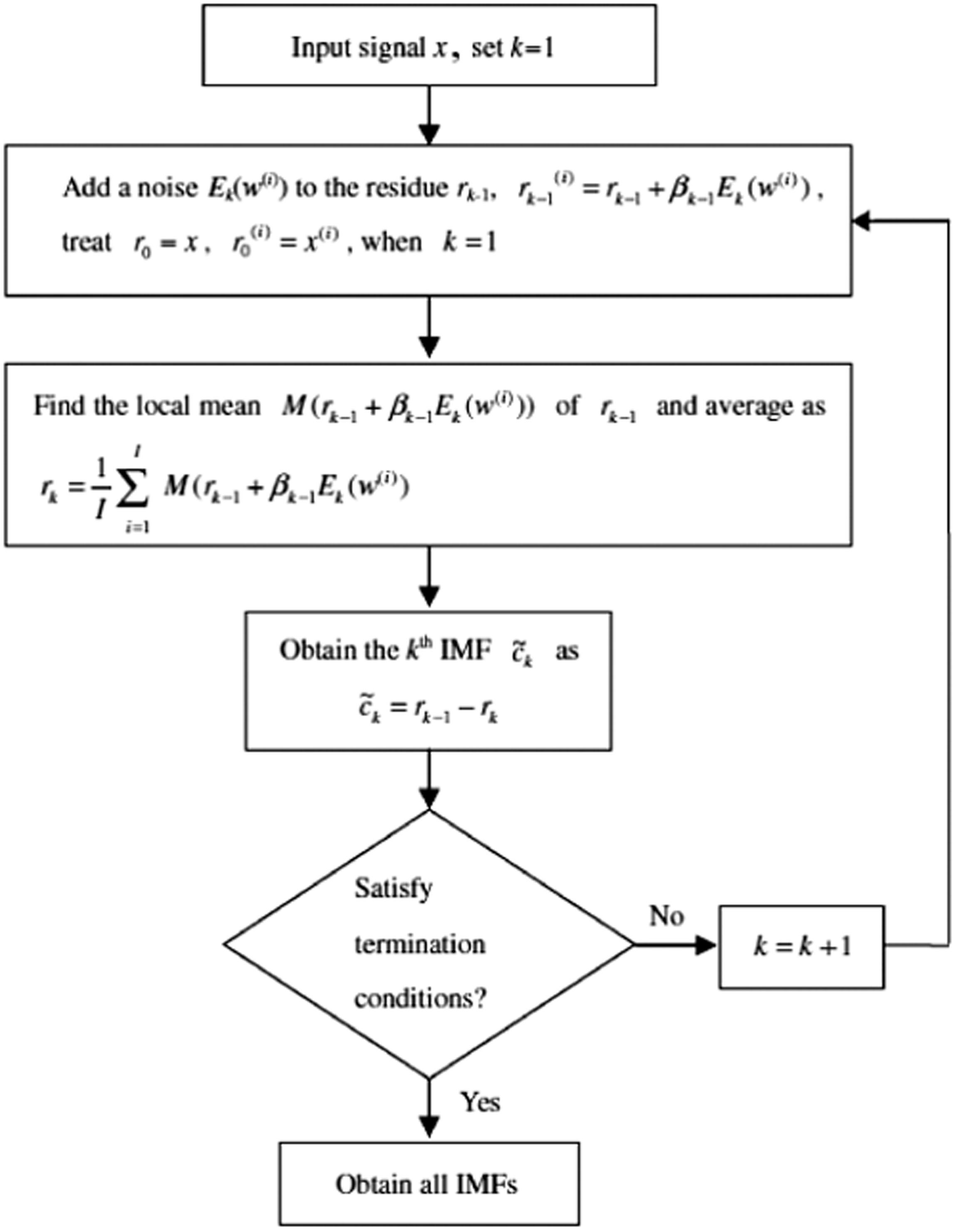
Flowchart of CEEMDAN method. IMF: intrinsic mode function.
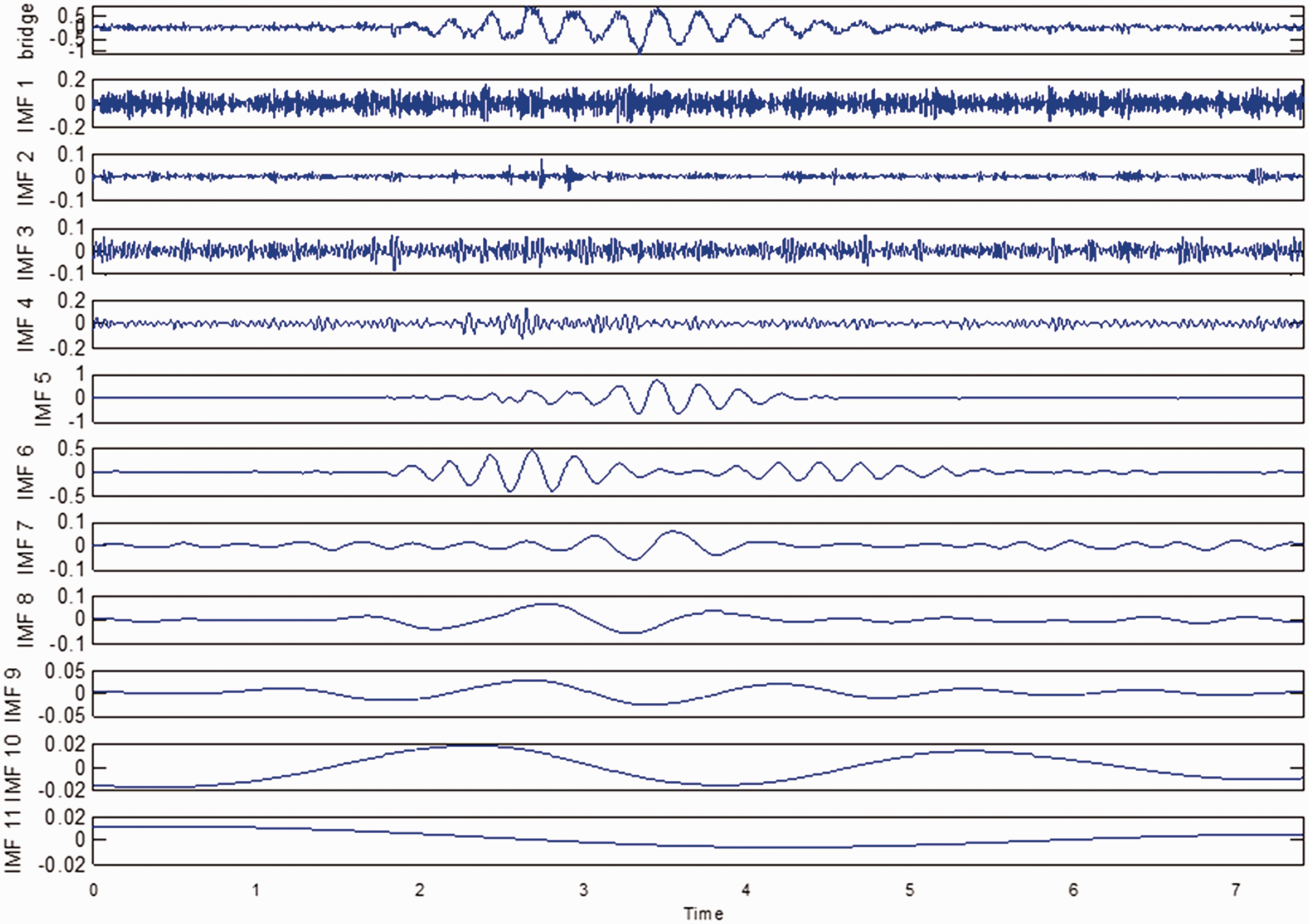
Next, we illustrate the results of EMD decomposition and spectrum identification using a typical measured acceleration signal as shown in Figure 7. Figure 13 shows the decomposed components of the measured acceleration signal. Figure 14 shows the Hilbert spectrum of the IMFs, and Amp means amplitude of spectrum.
Decomposed components of a measured acceleration signal using the EMD method. IMF: intrinsic mode function.
EMD HHT results.
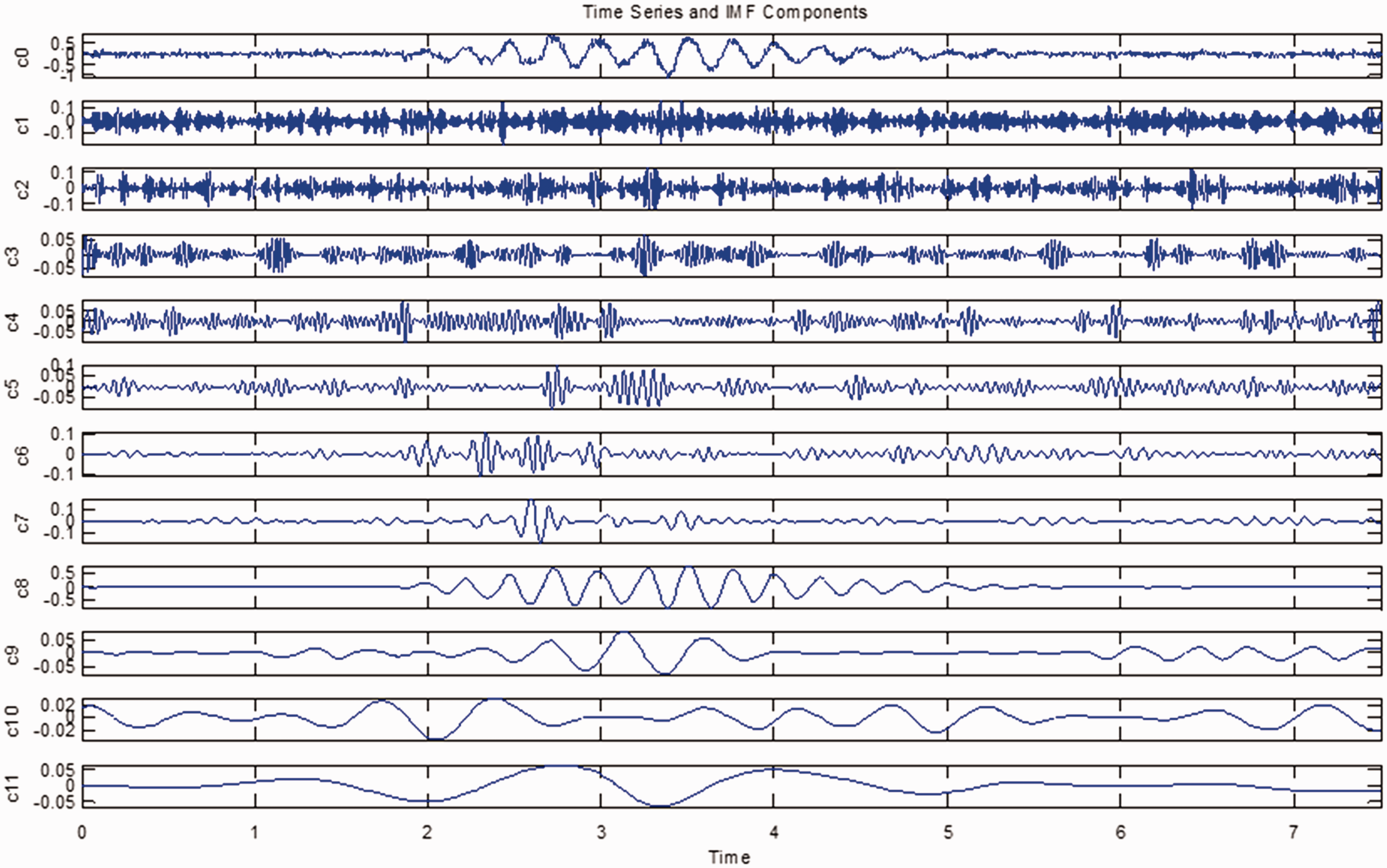
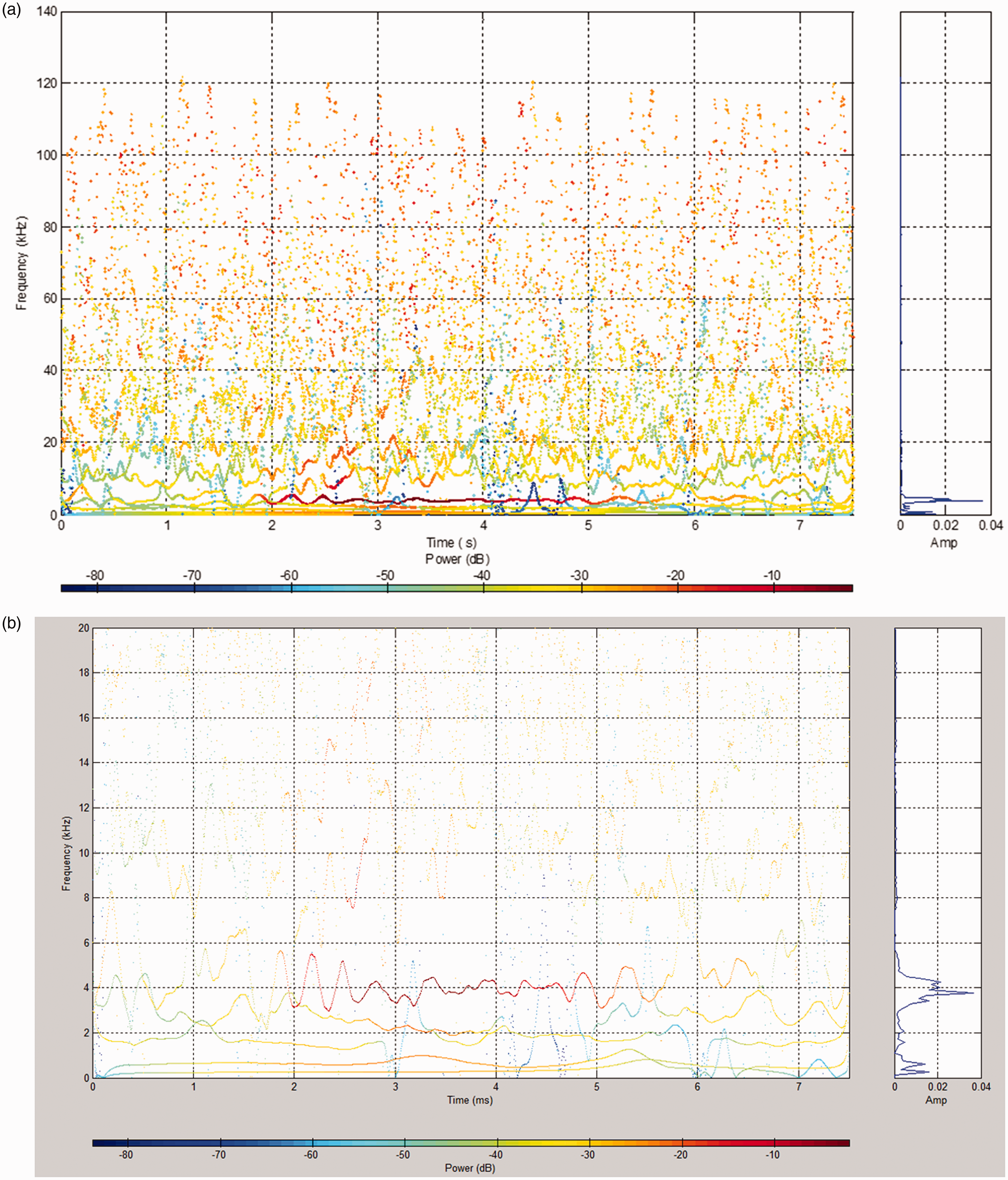
Next, we illustrate the results of CEEMDAN decomposition and spectrum identification using a typical measured acceleration signal as shown in Figure 7. Figure 15 shows the decomposed components of the measured acceleration signal. Boxplots of the sifting iterations required by each decomposition are presented in Figure 16. Figure 17 shows the Hilbert spectrum of the IMFs.
Decomposed components of a measured acceleration signal using CEEMDAN results. IMF: intrinsic mode function.
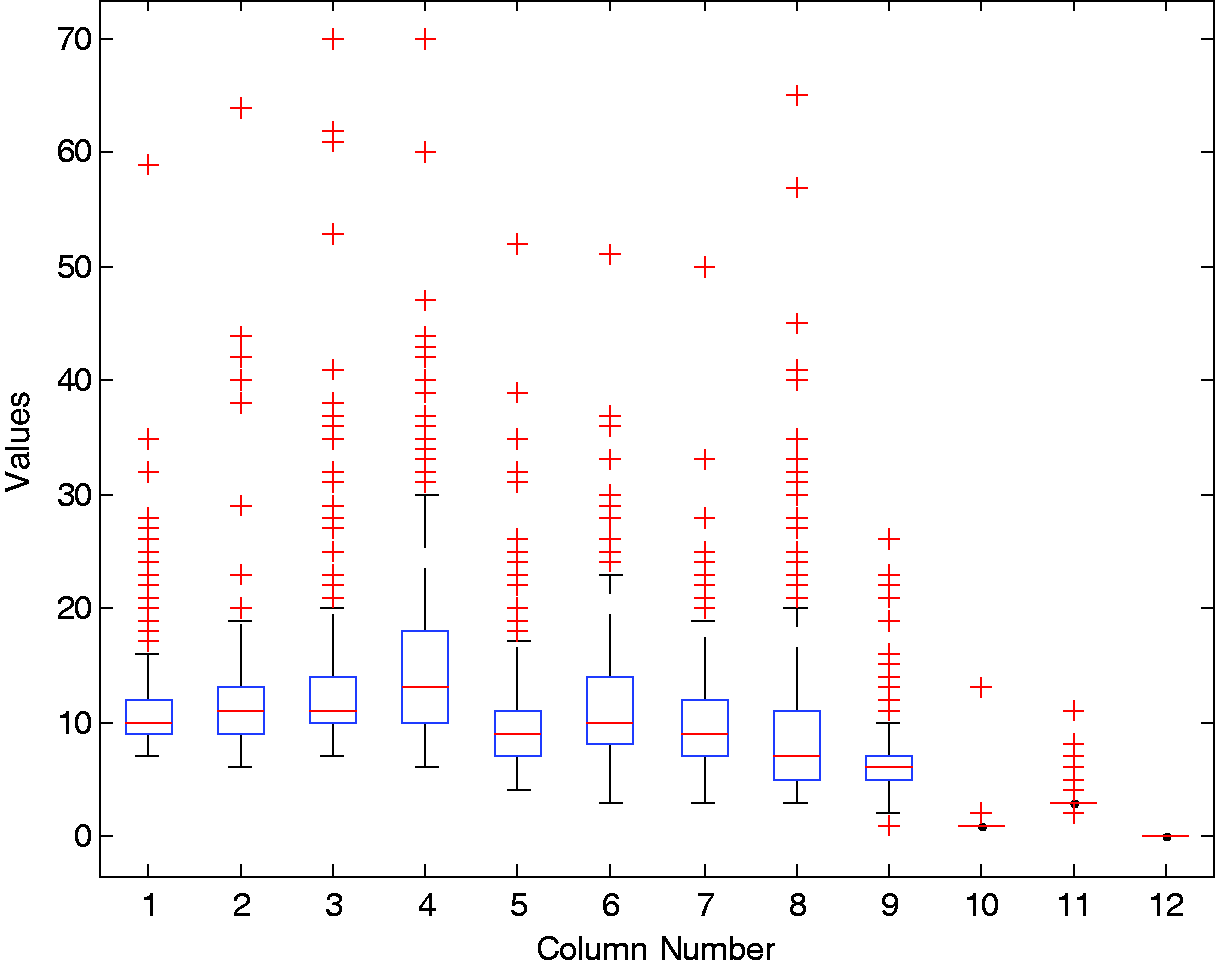
Boxplots showing the sifting iterations for each mode.
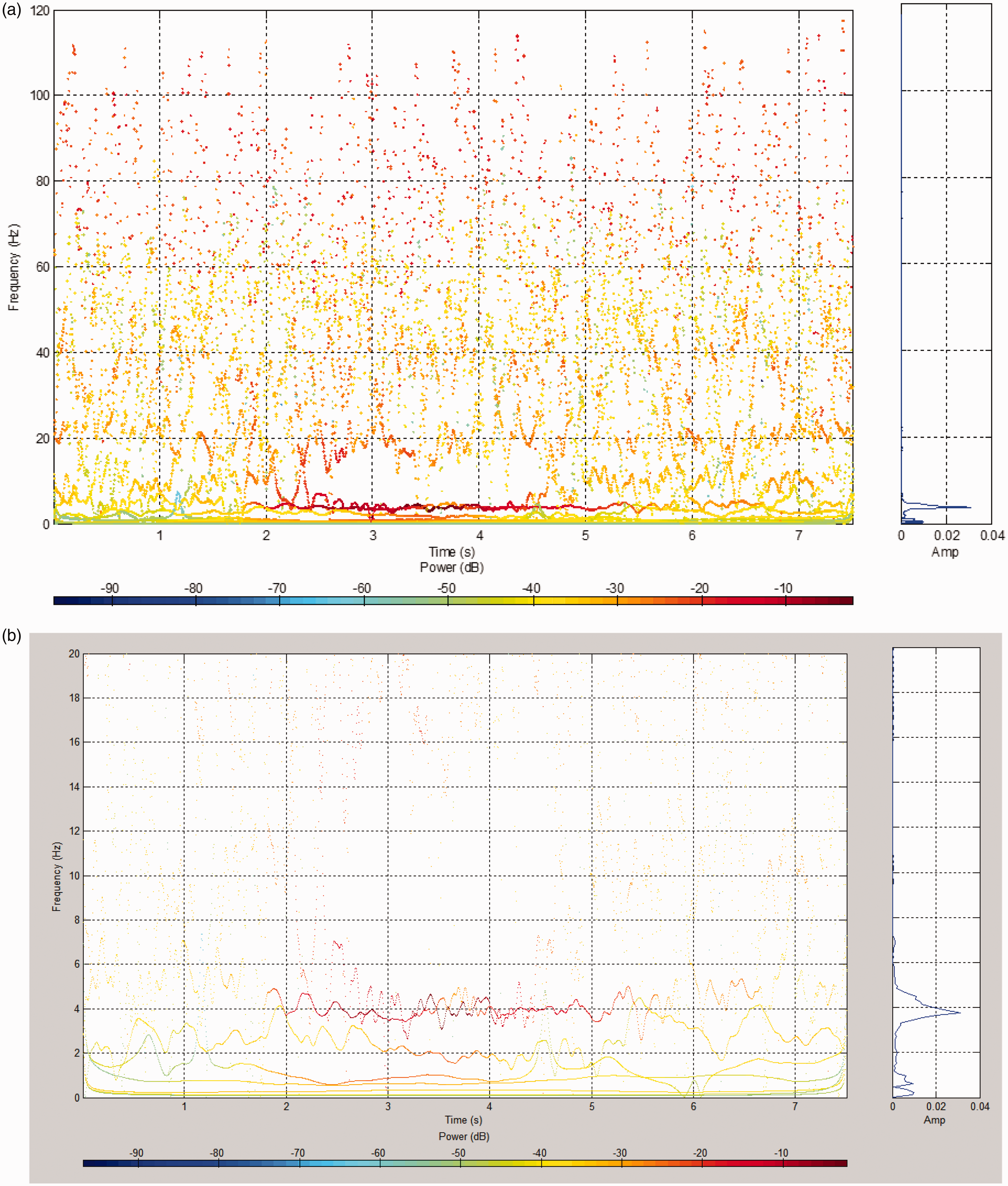
CEEMDAN HHT results.
Discussion and theoretical consideration
The approximate FEM results in Table 1 are based on linear mode analysis. It should be noted that in principle, a real bridge system under a moving vehicle is time varying. Many factors could result in variation in specific transient mode frequencies, such as vehicle motion and location, road excitation due to roughness/bumpiness, etc. Both spectrograms and scalograms exhibit mode mixing and merging in the proximity of linear natural frequencies (2.8–4.2 Hz) as shown in Table 1. However, in the proximity of these linear mode frequencies, both EMD and CEEMDAN give rise to clear transient frequencies with high resolution, which are superior to the results from power spectra, spectrograms, and scalograms. The HHT method does not suffer from the limitations of linearity required by the Fourier transform and its extensions. EMD generates adaptive basis IMFs from the signal. EMD is a method for decomposing a nonlinear and nonstationary signal into a series of zero-mean AM–FM components that represent the characteristic time scale of the observation. This is done by iteratively conducting a sifting process. Based on the analysis, the level of nonstationary and nonlinear features can be estimated. The advantage of CEEMDAN is that it has been theoretically proven and verified by many applications in other communities. We demonstrated that the bridge response identified using CEEMDAN is different from the results obtained from EMD. By comparing the dominant transient modes in Figures 14 and 17 in the range of 2–5 s, we can see that the spectrum results from EMD exhibit frequency variation between 3 and 5.5 Hz, whereas the spectrum results from CEEMDAN give rise to frequency variation between 3.5 and 5 Hz. This results in a 17% difference at the low-end and a 10% difference at the high-end.
SHM requires estimating the state of a bridge from the measured acceleration and the system’s identification. Conventional approaches involve estimation and identification of the system’s natural modes such as its frequency and natural modes as characterized in linear finite element analysis. However, real bridge responses exhibit complex dynamical properties including time-varying patterns. One specific aspect of SHM bridge studies is the characterization of the bridge’s time-varying responses under passing vehicles. Compared with conventional time–frequency spectrum approaches, CEEMDAN exhibits high resolution, and compared with other existing EMD approaches, CEEMDAN exhibits salient differences and its accuracy is guaranteed by an existing theoretical proof. As such, the time–frequency spectrum of CEEMDAN can be reliably applied as a signature for bridge SHM.
Conclusions
In this paper, CEEMDAN is applied for the first time to characterize the acceleration response of a bridge to a moving vehicle to extract the spectrum signatures of the bridge. The results of CEEMDAN are more adaptive and are obviously better than conventional power spectra, spectrograms, and scalograms in resolution. Both EMD and CEEMDAN offer very good resolution for transient frequency spectra. However, the results of the Hilbert spectrum of CEEMDAN are different from those of EMD, with a more than 10% difference in the estimated specific transient frequencies. CEEMDAN has been theoretically proven to be superior to EMD, as the results from EMD have a mode mixing problem and are therefore not as reliable as CEEMDAN results.
Footnotes
Acknowledgements
The writers wish to acknowledge the support from the Alaska Department of Transportation & Public Facilities, University of Alaska Fairbanks, University of Alaska Anchorage, Alaska Native Science and Engineering Program, Chandler Monitoring System Inc., Micron Optic, Inc.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Alaska University Transportation Center Grant No. 510015 and Nanjing University of Science and Technology, Start‐up, Grant Number: AE89991.