
Abstract
A linear optimal regulator for uncertain system is designed through the application of the probability density evolution method to linear quadratic regulator controller. One important background of this work is bridge-vehicle/gun-projectile system. This type of optimal problem is currently transformed into a moving load problem. The developed optimal regulator can provide the law of probability densities of outputs varying with time. In order to make the advocated method reach an optimal performance, the beneficial weighting matrix pair (
Introduction
Resisting the respective elastic vibration of bridges and barrels caused by high-speed motions of vehicles and projectiles is essential to the design of bridges and firing accuracy of pills. Such bridge-vehicle system and gun-projectile system are generally taken as beam-moving mass systems (BMSs).1–4 Recently, more and more attention has been attracted to optimal controller design of BMSs, such as time-varying optimal controller design in vehicle-bridge interaction, 5 constant gain feedback gain design in vehicle-railway system, 6 the contribution of displacement-velocity feedback controller on the BMSs, 7 the influence of Lyapunov-based boundary controller on statically indeterminate beam 8 and the usage of a proportional-integral controller on the magnetic wheels-guide rail system. 9 Due to the uncertainties of system parameters and/or input disturbances, an optimal controller should be designed as uncertain. Although the existing deterministic controller design methods, up to now, still play significant roles, these methods cannot accurately reflect the robustness of uncertain systems. Consequently, a series of research topics about uncertain optimal controller design have arisen. For BMSs, to name but a few, time-varying stochastic optimal problem 10 and robust problem of a stream of random moving loads 11 have been researched in recent years. For other uncertain system, in Zhu and Ying 12 an optimal feedback control scheme for nonlinear structural system excited by a non-Gaussian process was proposed based on the stochastic averaging method for quasi-Hamiltonian system and the stochastic dynamic programming principle. In Monti et al., 13 a new control approach for a power converter with parameter uncertainty was presented based on the Polynomial chaos Theory. In Fisher and Bhattacharya, 14 different control methods related to problems of linear quadratic control (linear quadratic regulator (LQR)) for systems with uncertain parameters was put forward by using the generalized Polynomial Chaos Theory. In Gallagher, 15 the finite-horizon optimal control as a method of robust control design for a stochastic system was developed through optimizing a polynomial chaos expansion (PCE). In Peng et al., 16 an optimal control was implemented for a system with stochastic earthquake excitation described using PCE for a nonlinear oscillator. The Karhunen-Loeve (KL) decomposition was used to describe the excitation. In Zhu and Huo, 17 a robust nonlinear control strategy was proposed for trajectory tracking of a model-scaled helicopter with parameter uncertainties, and this controller was based upon the back-stepping approach with nonlinear damping terms. In Song and Dyke, 18 an optimal control strategy of nonlinear stochastic system was developed through the application of pseudo-spectral (PS) method. In Jameson, 19 the sensitivities of robust optimal control was investigated by combing PCEs and adjoint theory.
It should be noted that the aforementioned studies mainly focus on attaining the regular distribution types and second-order moments of the responses of stochastic controlled systems. Although a PCE can obtain high-order statistical moments, this method cannot acquire the rule of probability densities of system outputs varying with time. To get over this difficulty, a generalized probability density evolution theory was developed based on the ideology of physical stochastic system.20,21 Meanwhile, Li and Chen 20 also pointed out that traditional stochastic expansion method was found not capable of adequately reflect the probabilistic characteristics of stochastic dynamic systems, and the probability density evolution method (PDEM) is able to capture the rule of probability densities varying with time rather than just the second-order moment of uncertain responses. Moreover, the density evolution theory was also applied to the dynamic analysis and dynamic reliability of structures. 22 Sequentially, the density evolution theory of importance measure was developed to discuss reliability sensitivity of truss structures. 23 By using the method, the probability density function (PDF) is varying with time and the instantaneous PDF is sometimes quite irregular with multiple peaks, rather than regular distribution function types.20,24–28
However, up to now, the vibration control problem of uncertain BMSs has been rarely researched, especially, the uncertain control strategy. To accurately reflect the law of probability densities of output responses of the controlled BMSs varying with time, an optimal regulator-based on density evolution theory is originally proposed to calculate the system’s outputs. This type of vibration control problems, which denotes the purport of the current research, is actually a procedure of uncertainty propagation. Therefore, a proposed linear optimal regulator-based density evolution theory is summarized as follows: (1) dynamic equation of controlled systems with uncertainties of inherent properties can be derived through designing a proposed linear optimal output regulator. For the sake of the optimal performance of the contrivable controller, the weighting matrices
Methods
Probability density evolution equation of uncertain system
Because of the uncertainties of inherent system properties, a variety of uncertain control synthesis strategies needs to rise gradually. Although deterministic linear and nonlinear control strategies still have taken up some space, these schemes could not reasonably reflect the impacts of control performance on uncertain systems. Some literatures related to active control of uncertain systems, especially BMS systems, have been reported. For example, stochastic linear-quadratic-Gaussian (LQG) control and time-variant optimal polynomial chaos control were deeply researched in Stancioiu and Ouyang.10,11 Meanwhile, there are also large amounts of stochastic control algorithms for other types of uncertain systems, such as PS control, 18 optimal stochastic averaging feedback control, 12 and PCE control.13–16 The aforementioned investigations mainly focus on implementing the second-order statistics of response outputs. Although a PCE is able to obtain high-order statistical moments, this method cannot exhibit the probability densities evolution of the calculated responses. To overcome the above problem, a physical stochastic optimal control strategy is developed by using a generalized PDEM.20,21 This type of vibration control problems, which represents the purport of the current research, is actually a procedure of uncertainty propagation. Therefore, we originally concentrate on an optimal regulator-based on density evolution theory. First, the basic theory of the evolution was introduced as follows:
Without loss of generality, the equation of motion of uncertain system can be uniformly written as

According to the principle of preservation of probability, the conditional PDF of

The generalized probability density evolution equation (PDEE) can be obtained by taking the derivative of equation (2)

The initial condition for equation (3) is

The PDF of

Sequentially, the law of probability densities of output responses
Linear optimal regulator design-based on PDEM for uncertain BMSs
An Euler–Bernoulli beam with multiple active tendon control systems under the moving mass and simply supported boundary conditions is considered. The inclination angle of the ith tendon with respect to the support is denoted by


Applying modal superposition method
31
to equation (6) by multiplying both sides of the equation by



After terminal time instant tf, the beam vibrates freely and the stochastic controlled system is expressed as follows

The controlled system (8) can be written in state-space form

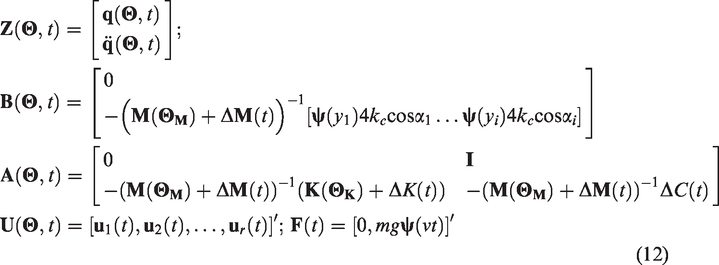
When the control problem of the stochastic system (12) needs to be solved, the control objective can be defined as the minimization of the mid-span deflection response of the beam. Then, the optimal problem is changed to a linear quadratic problem, which is obtained by a quadratic performance index



The most important advantage of the state-space control technique is that it can consider the control to be expressed as a state-feedback function (11) of the manuscript and can transform the system from an open-loop control system into a closed-loop control system. By employing this method, the control function can be synthesized based on dynamic equations of the system regardless of the effect of any force acting at the system input. Then, a simple change of variable can be introduced which can consider the forcing term
Figure 1 depicts the system construction drawing of uncertain optimal output regulator in a finite time. From this figure, it can be deduced that the propositional regulator gives a novel controller alternative to a deterministic controller.
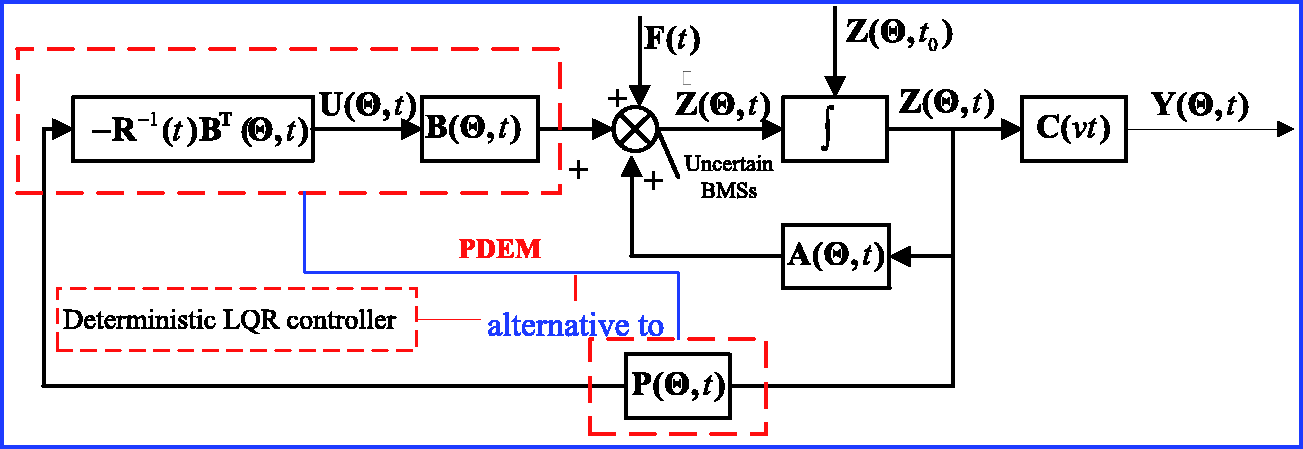
System construction drawing of uncertain optimal output regulator in a finite time. PDEM: probability density evolution method; BMS: beam-moving mass system; LQR: linear quadratic regulator.
According to equations (13) and (14), one realizes that the critical procedure of LQR problem relies on the selection of weight matrices

Likewise, equation (11) can be also written in state-space form


This optimal problem of system (11) is obtained by using the following quadratic performance index



Analogously, the system structure graphic of uncertain optimal output regulator for infinite time is described in Figure 2. For this type of the regulator, terminal state must be equal to zero, namely,
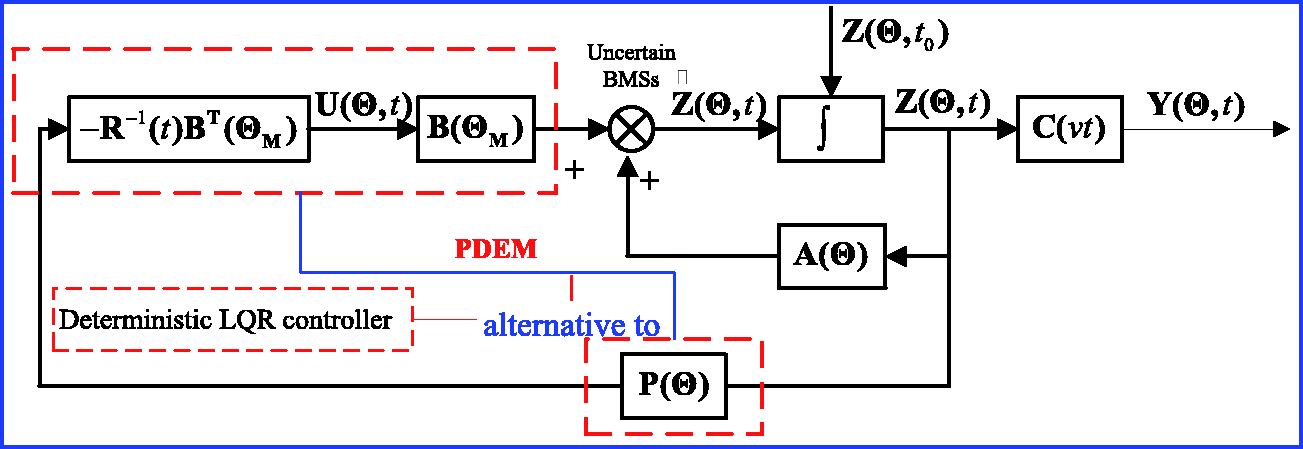
System construction drawing of uncertain optimal output regulator for infinite time. PDEM: probability density evolution method; BMS: beam-moving mass system; LQR: linear quadratic regulator.
Based on the probability density evolution theory, the PDEE with respect to

The initial condition for equation (22) is

The PDF of the mid-span deflection

Similarly, the PDEE with respect to

The initial condition for equation (25) is

The PDF of the control force

Procedures of designing and solving the optimal output regulator
The specific procedures of designing and solving the optimal output regulator are depicted in Figure 3 and can be summarized as follows:
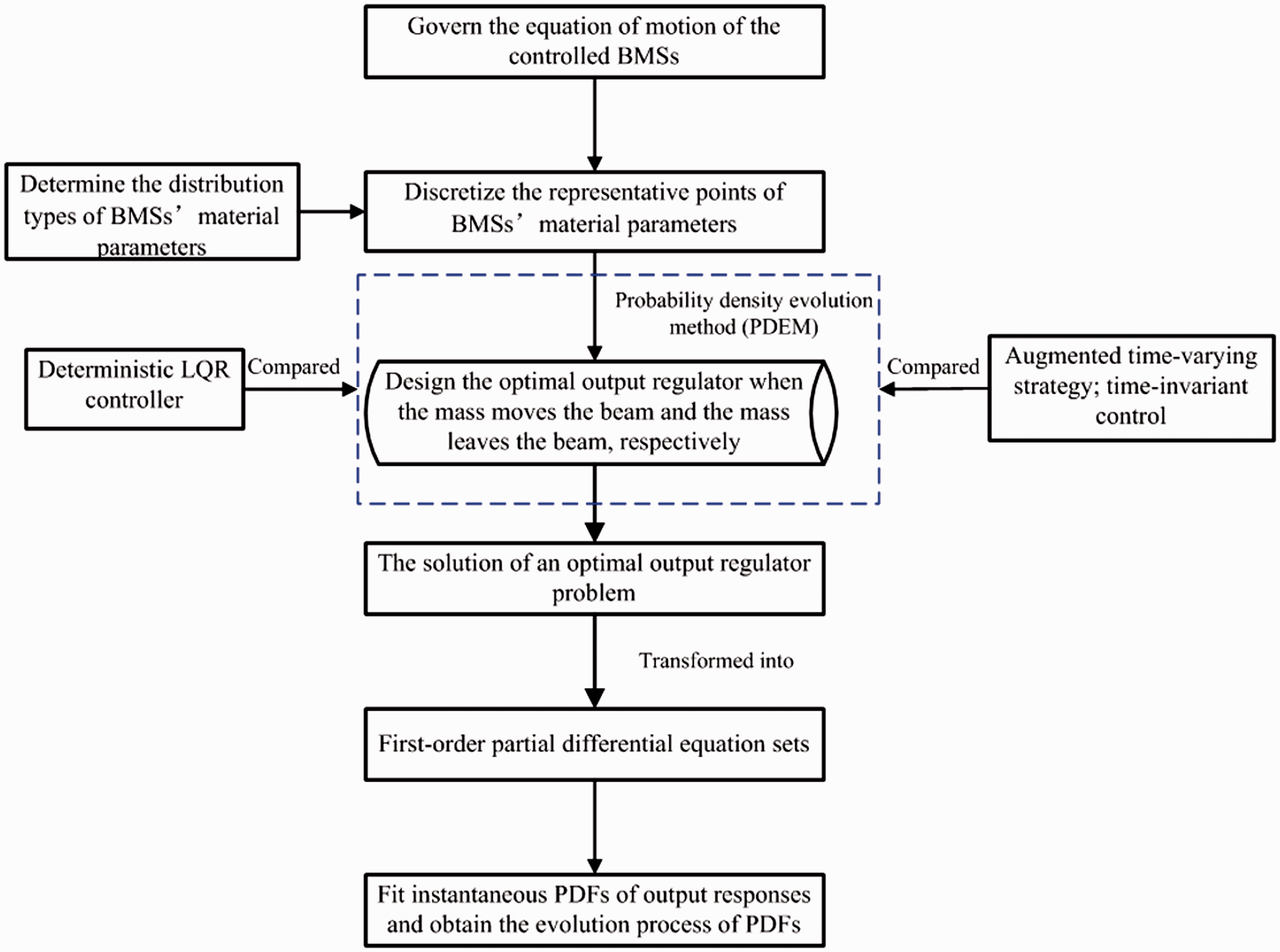
The flowchart of designing and solving the optimal output regulator. PDEM: probability density evolution method; BMS: beam-moving mass system; LQR: linear quadratic regulator; PDF: probability density function.
Govern the equation of motion of the controlled BMSs;
Determine the distribution types
Discretize the representative points of BMSs’ parameters;
Design the optimal output regulator-based on PDEM;
Transform the solution of an optimal regulator problem into a problem of First-order partial differential equation sets; and
Fit instantaneous PDFs of output responses and analyze the evolution process of PDFs.
Simulation
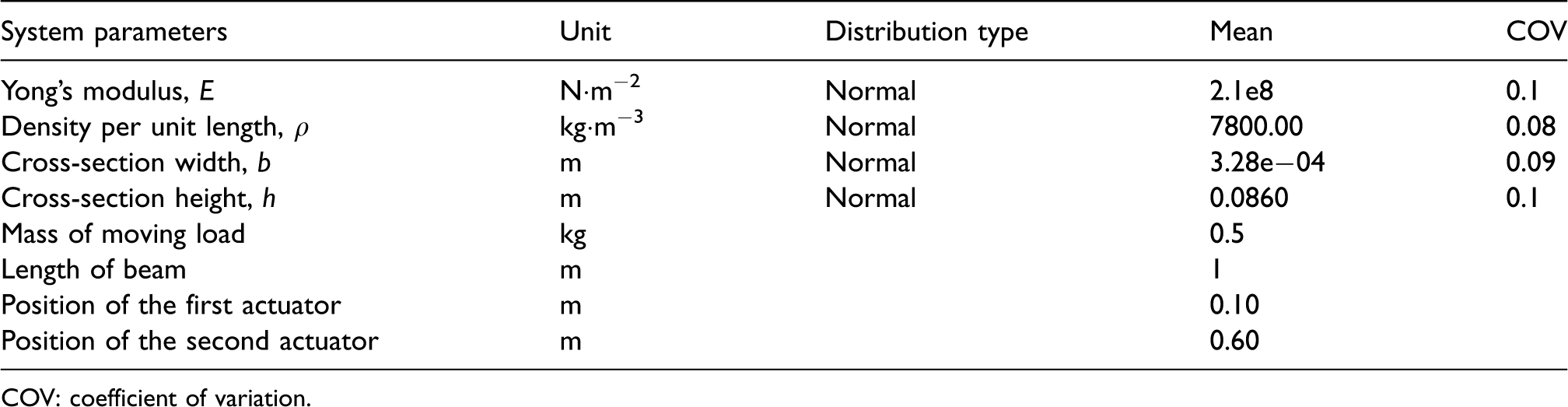
A simply supported Euler–Bernoulli beam is used to demonstrate the efficiency of the proposed design method, as shown in Figure 4. A moving mass with constant speed travels on the beam. In this example, the performance of the stochastic controlled system with multiple actuators is observed as a solution for suppressing the mid-span deflection response of the beam. All numerical parameters of the BMS are listed in Table 1.
5
The constant speed of 2 m/s is selected in the BMSs. The control force of the ith actuator is denoted by
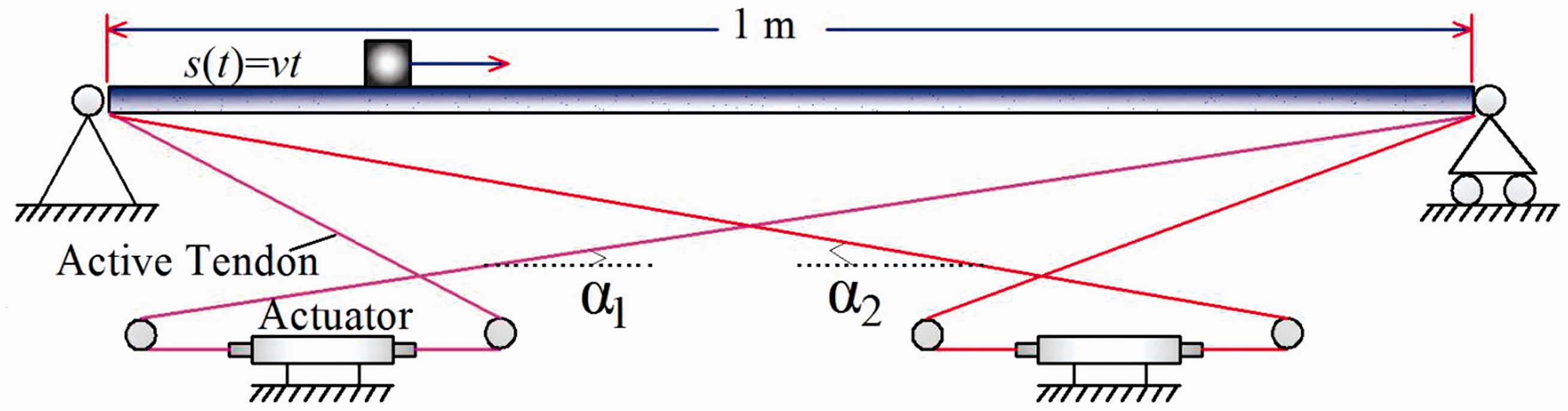
BMSs with two active tendons.
Numerical parameters of the example system.
COV: coefficient of variation.
Mid-span deflection of the beam at the uncontrolled condition.
The gain control matrix
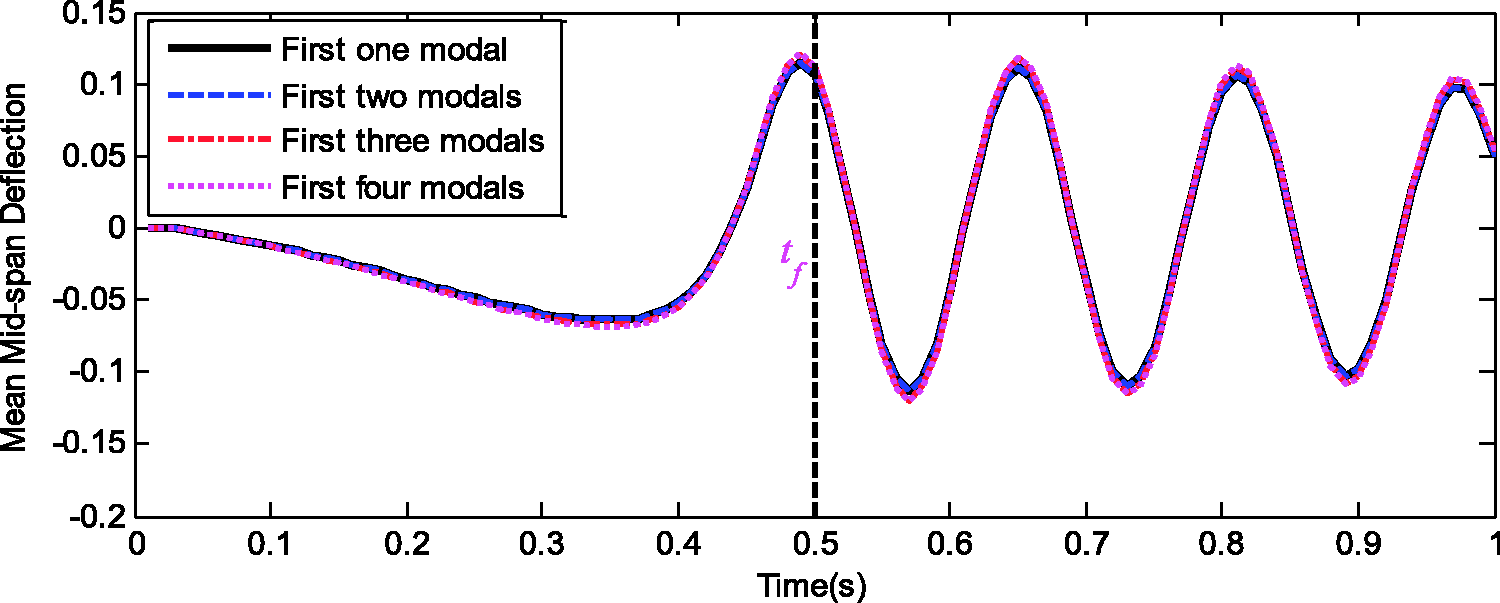
Time history of the mean of the mid-span deflection of BMSs with/without control. ODEC: optimal design control-based density evolution.
Meanwhile, the time history of the mean of the mid-span deflection of BMSs is compared with ODEC and Monte Carlo simulation, as shown in Figure 7. It can be derived that the response of uncertain BMSs with ODEC is close to that with Monte Carlo simulation. It should be noted that the ODEC strategy can be verified by using Monte Carlo simulation because the ODEC scheme involves the system’s uncertainty. These results indicate that the proposed ODEC scheme behaves well in precision. Here, the respective discrepancies of time histories of the mean of mid-span deflection and control forces between the coefficient b = 0.1and b = 0.9 are presented in Figure 8, where a equals 1000. It is seen that: (1) as b = 0.9, the control effect for the time history of the mean of mid-span deflection is underestimated; (2) however, the time history of the mean of control forces
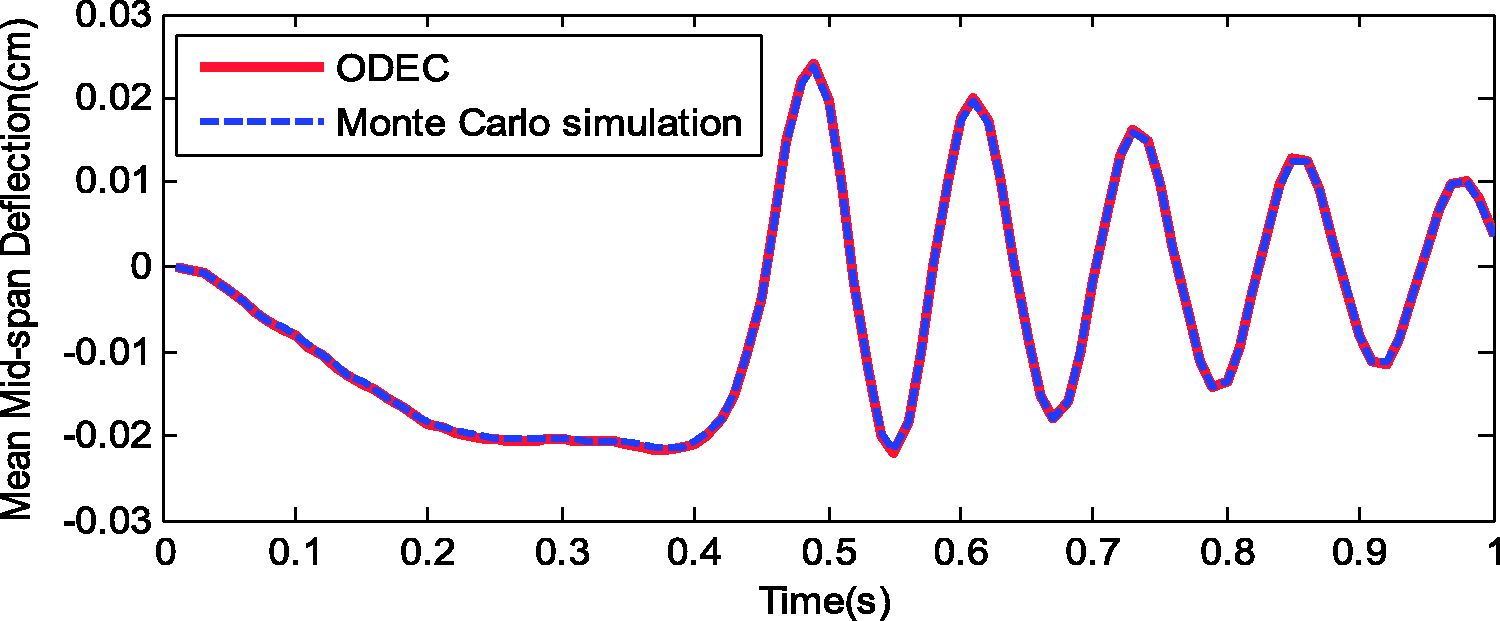
Time history of the mean of the mid-span deflection of BMSs: comparison between ODEC and Monte Carlo. ODEC: optimal design control-based density evolution.
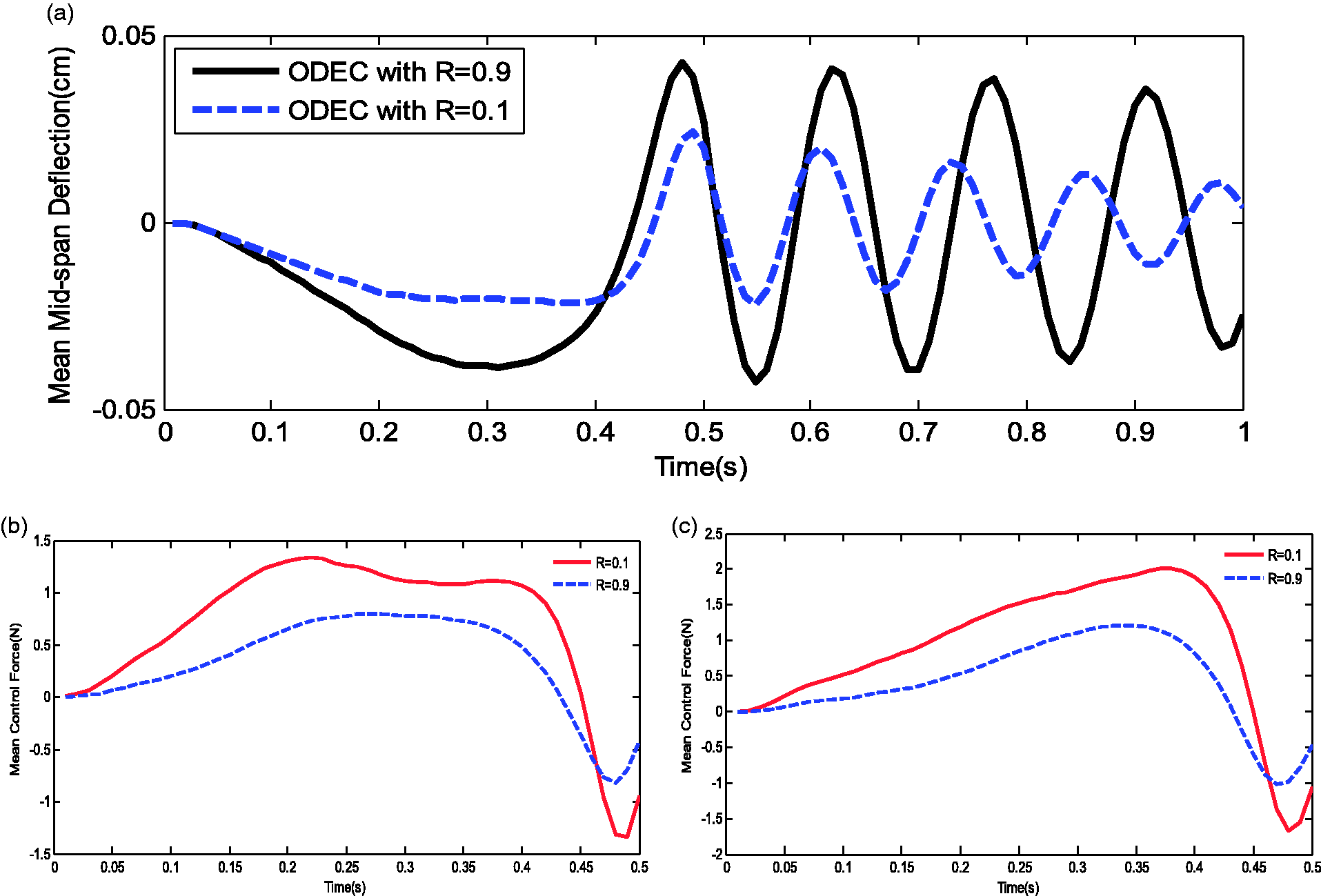
Time histories of the mean of mid-span deflection and control forces between the coefficient b = 0.1and b = 0.9. (a) Mid-span deflection of BMSs, (b) u1(t) and (c) u2(t). ODEC: optimal design control-based density evolution.
Figure 9 shows probabilistic characteristics of the mid-span deflection with/without control, including typical PDFs at different instants of time. From this figure, it can be seen that the mid-span deflection is obviously reduced. These observations illustrate that the recommended controller is able to efficiently suppress the vibration of uncertain BMSs. Furthermore, the results show that PDF of the deflection is varying with time and quite different from the regular distribution. The probabilistic characteristics of the control inputs
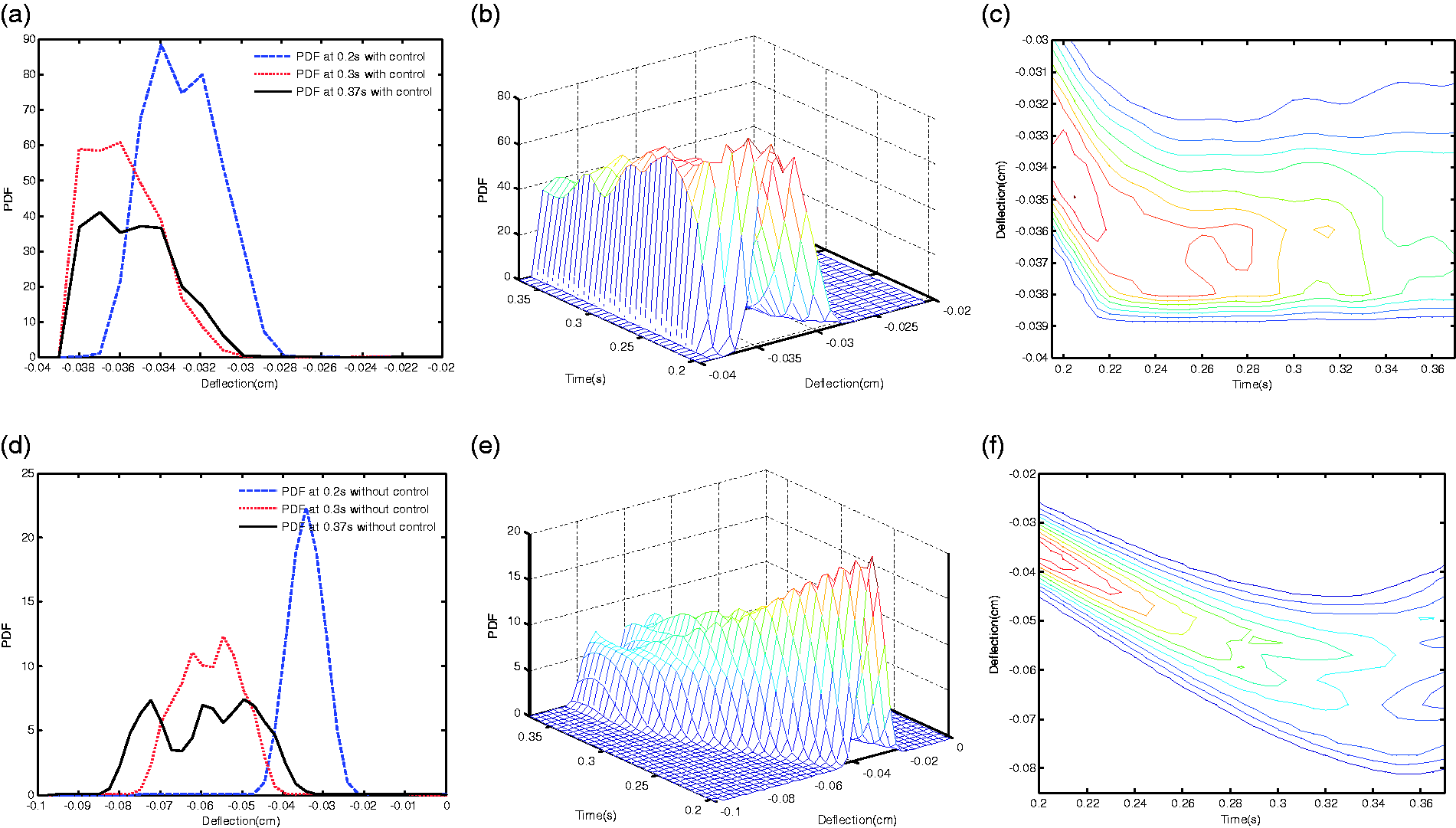
Probabilistic characteristics of the mid-span deflection with/without control: (a)–(c) Typical PDFs of the mid-span deflection with control varying with time. (d)–(f) Typical PDFs of the mid-span deflection without control varying with time. PDF: probability density function.
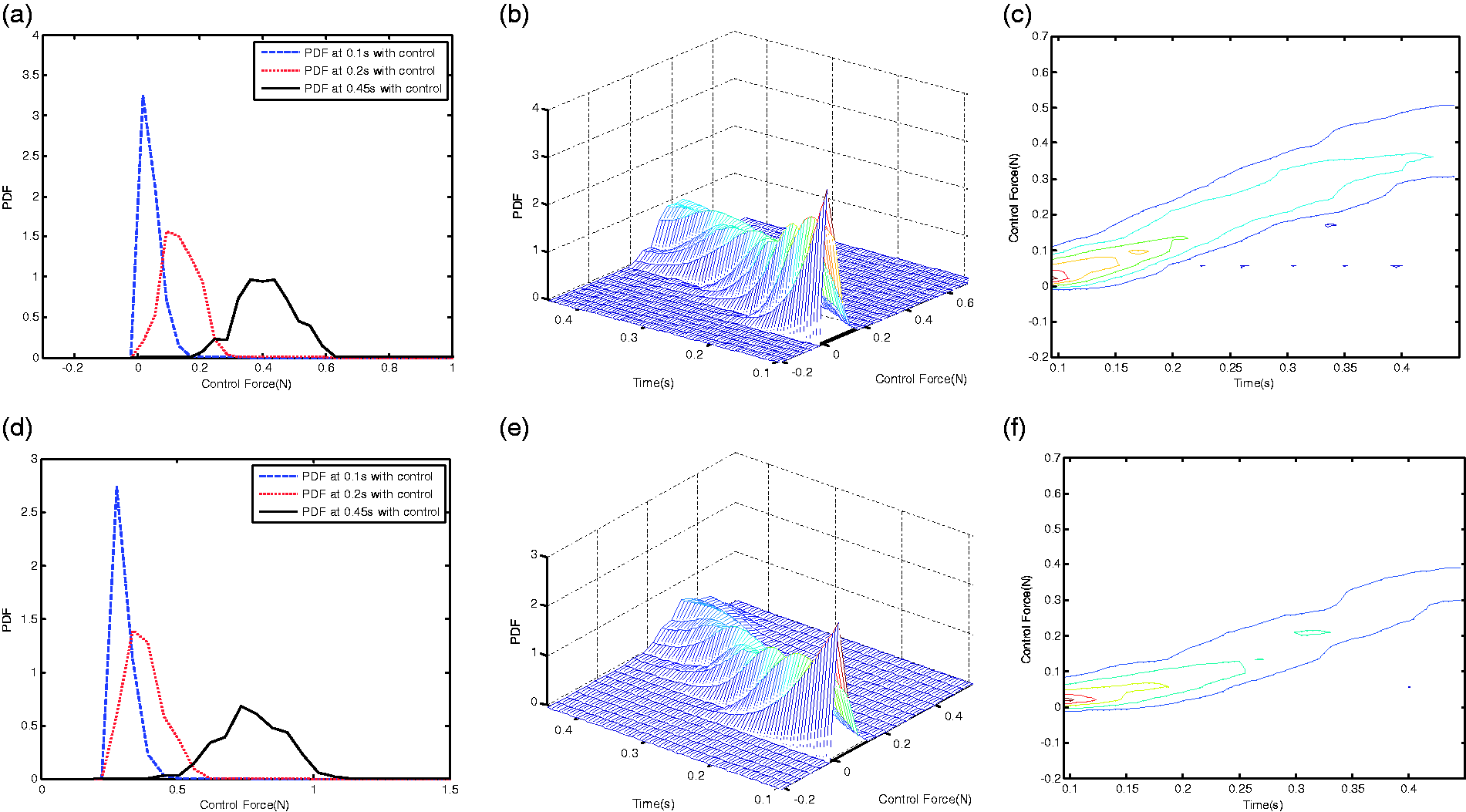
Probabilistic characteristics of the optimal control forces: (a)–(c) Typical PDFs of
Although the deterministic control (e.g. deterministic LQR, deterministic LQG) might be applied to suppress the responses of stochastic systems, the control force only depends on the constant gain matrix, rather than the stochastic gain matrix. Figure 11 shows the discrepancy of time history of mid-span deflection between the deterministic LQR controller (DLC) and the optimal controller scheme-based on PDEM (ODEC). Actually, ODEC represents the nondeterministic controller and DLC denotes the deterministic controller. From the figure, it is concluded that as the beneficial coefficients a = 1000 and b = 0.1, the control effect of the output response and the robustness of the advocated controller are overvalued using the DLC. The discrepancy of the control forces between the two methods is seen by analyzing Figure 12 where the control action is plotted for the time history. It can be found that the absolute control input
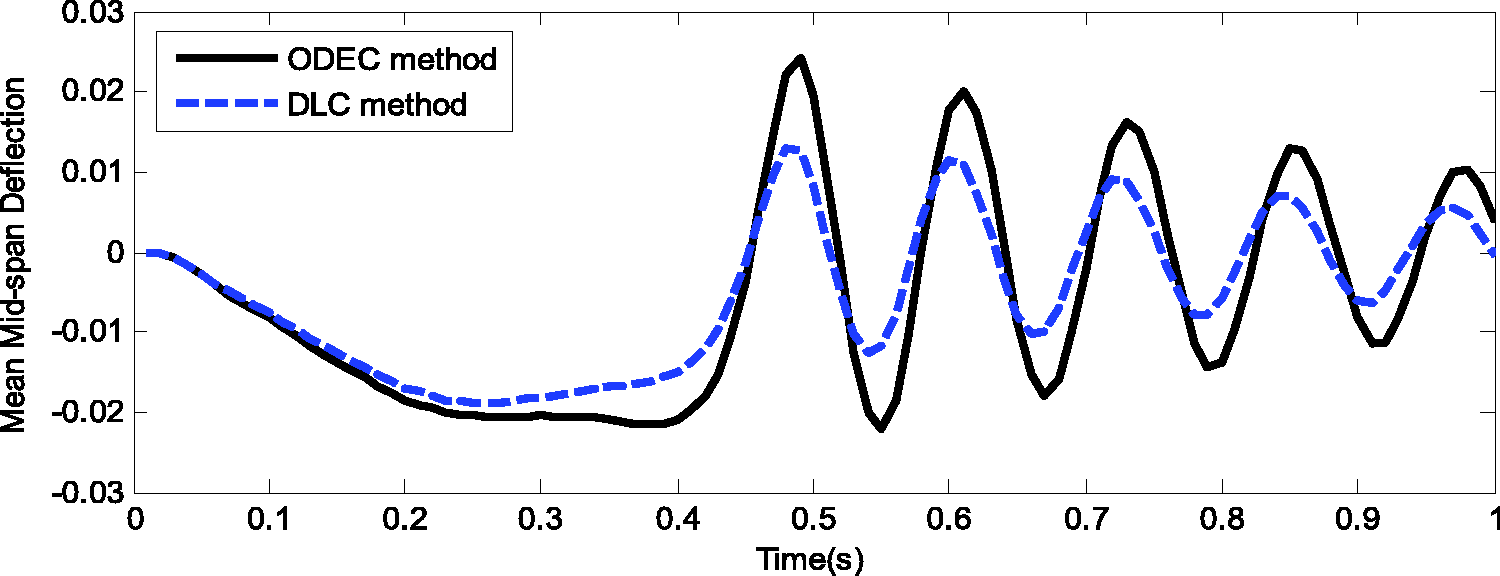
Time history of mid-span deflection between the ODEC method and DLC method. ODEC: optimal design control-based density evolution; DLC: deterministic LQR controller.
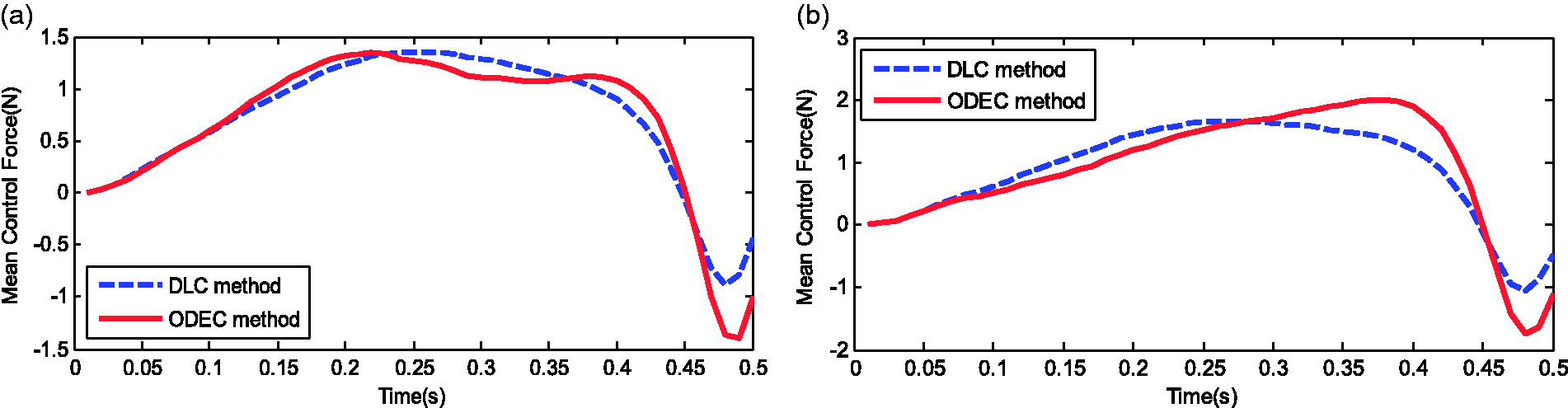
Time history of the mean of the control forces between the ODEC method and DLC method: (a) u1(t) and (b) u2(t). ODEC: optimal design control-based density evolution; DLC: deterministic LQR controller.
Figure 13 shows the time history of mid-span deflection with various control strategies. It can be observed that although all the control schemes can be employed to suppress the vibration of the beams, both the ODEC method and the augmented time-varying method (Augmented matrix) exhibit a higher control performance. Time-invariant control method only depends on the time-invariant system matrix
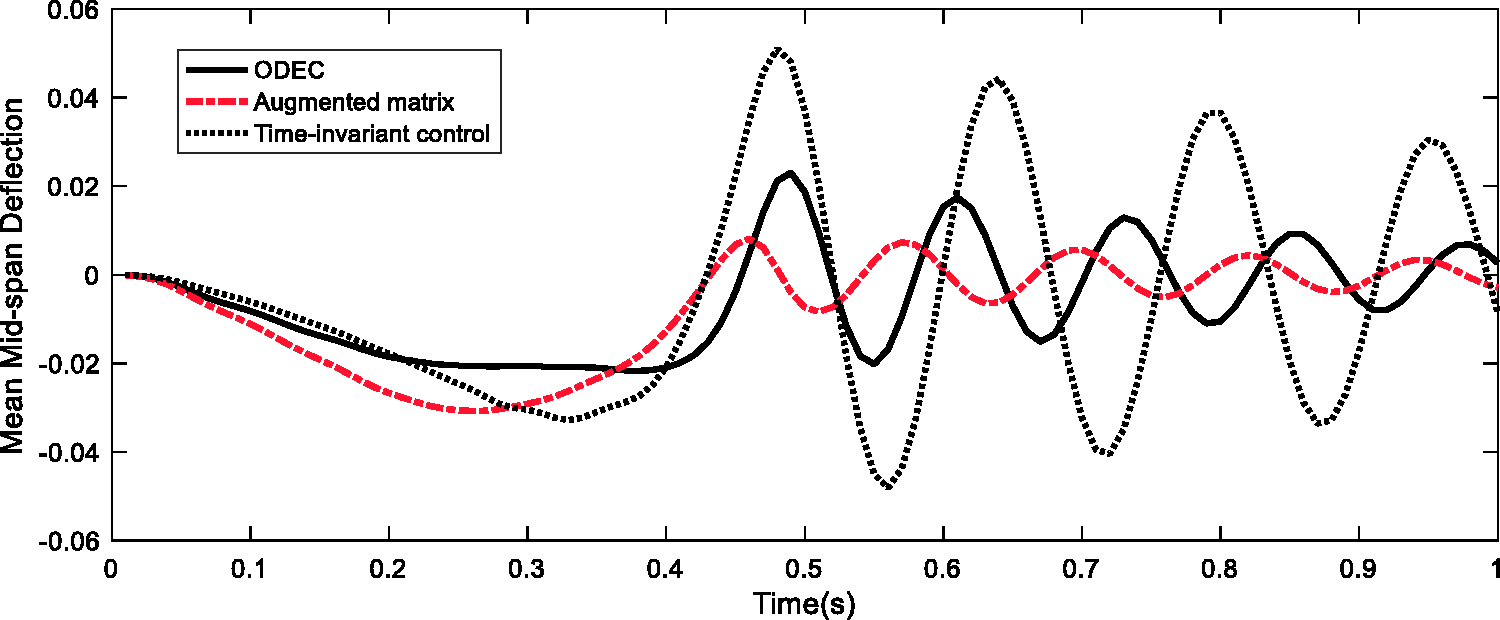
Time history of mid-span deflection with various control Strategies: ODEC-proposed control method; Augmented matrix-the modal force is augmented to the matrix
Conclusions
This paper devises an optimal regulator-based on PDEM for an uncertain BMSs. In order to obtain the law of probability densities of control inputs and output responses, the designed controller is then applied to the BMSs. Meanwhile, a quadratic performance index related to the optimal problem is defined. The beneficial weighting matrices
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors acknowledge the support of National Natural Science Foundation of China (Grant Number 11802224), China Postdoctoral Science Foundation (Grant Number 2018M633495), Fundamental Research Funds for the Central Universities (3102016ZY2016), China State Key Laboratory for Mechanical Structure Strength and Vibration Open-end Foundation (Grant number SV2019-KF-11) and Aerospace Science and Technology Innovation Fund (2016kc060013).