
Abstract
This work presents a methodology to estimate the unknown damping and stiffness parameters of supine humans at the cervical and lumbar regions while reducing errors presented in the data. Modal parameters (natural frequencies, damping ratios, and eigenvectors) determined from experiments on 11 supine-human subjects exposed to vertical whole-body vibration were used in an inverse modal problem to solve for physical parameters (stiffness and damping). Due to uncertainty in the error level in the modal data, a methodology is presented to reduce the error by correcting the phase of the eigenvectors. Constraints that preserve the inter-connectivity of the physical stiffness and damping matrices were utilized via semi-definite programming. A four-degree-of-freedom human model, as suggested by the experimental modal analysis, was used for computational and analysis purposes. The resulting damping and stiffness parameters of the cervical and lumbar regions produced the right structure of the stiffness and damping matrices and satisfied the equation of motion. Validation analysis on the predicted acceleration response in the time domain of the human model, using the resulting damping and stiffness parameters, demonstrated characteristics very close to those found by the experiments. This work presents new information with many potential applications to the field of biomechanics.
Introduction
The motion of the cervical and lumbar spines of humans is to some extent determined by the collective physical properties of the intervertebral discs, facet joints, ligaments, surrounding tissues, and muscles. With no existing direct way of measuring these physical properties of humans in vivo, the current traditional research is based on cadaver or animal models, mostly under static or quasi-static loading. 1 The characterization of the damping and stiffness parameters of a human at the cervical and lumbar areas is a significant component in many applications, such as the development of biomaterials, the design of prosthetic devices, and the development of medical transport systems (neck collars, for example). Due to the complex interactions between the different components of the human body, the measurements of the physical properties, especially damping, must be done under dynamic loading conditions. The information about damping in biomechanics is not as well established in the literature as it is in the area of structural dynamics, where damping can be approximated by different models, including proportional damping, in which the damping is expressed in terms of mass and stiffness. Still, finding appropriate damping parameters for aerospace and advanced materials in structural dynamics remains a challenging area of research.2–4
Different methods were proposed in the literature to predict the damping, mostly proportional damping, and stiffness parameters of humans under whole-body vibration using human modeling. In these approaches, the unidentified stiffness and damping parameters of multi-mass-spring,5–8 rigid bodies connected by viscoelastic elements and muscle groups,9,10 or finite element11–13 models, are predicted using optimization schemes. Such schemes normally modify the stiffness and damping parameters of the model to minimize the error between the experimental and predicted transfer functions that correlate the input and output motions. Most work in this area has been conducted on seated-human configurations; only a handful of papers considering the supine-human configuration14–16 were found in the literature. Vogt et al. 14 used a four-degree-of-freedom (DOF) spring-mass system to model supine humans under whole-body vibration. They updated the stiffness and damping parameters of the model to reproduce the measured impedance and transmissibility of nine human subjects under sinusoidal vertical vibration and a constant acceleration magnitude. Peng et al. 15 proposed a 14-DOF human model to update the impedance-based human-berth coupled dynamic system as adopted by ISO 5892–1981.
One major drawback in most of the current optimization-based approaches is in their direct usage of the experimental data, which can contain considerable error due to environmental and experimental noises. The uncertainty in the amount of noises in the experimental data may lead to stiffness and damping parameters that have no physical meaning. Another major problem in current techniques is that the resulting stiffness and damping matrices may not have the right inter-connectivity structure, may have non-zero out-of-diagonal elements in the stiffness and damping matrices, and may not satisfy the equation of motion, which can lead to parameters that have no physical meaning.
Experimental modal analysis, a well-established area in structural and mechanical systems 17 and a relatively new one in biological systems,18,19 is another way to predict the dynamic properties of systems under vibrational loading in terms of their natural frequencies (large response at certain frequencies), modal damping, and eigenvectors (global distorted shapes at natural frequencies). Van Engelen et al. 18 used experimental modal analysis on human lumbar motion segments and showed a good correlation between the stiffness obtained from static testing and that obtained from modal analysis. Van Engelen et al. 19 also showed the validity of using vibration testing to estimate the modal parameters of goat lumbar vertebral segments and the feasibility of using vibration to study the mechanical properties of spinal segment motion in vivo. While the modal parameters represent the dynamic characteristics of the system, they do not represent the real physical damping and stiffness parameters. Therefore, work has been done to use the modal parameters to solve for the physical parameters through a process called the inverse modal problem.3,4
A major problem in solving the inverse modal problem is the existence of noise in the modal data that may lead to unrealistic physical parameters. Different methods have been proposed3,4,20 to solve the inverse modal problem; however, most existing methods suffer from short outcomes as experimental error and noise are inherently presented in the modal parameters. Qiao and Rahmatalla 21 proposed a new methodology to determine more accurate and sound damping and stiffness parameters for structural and mechanical systems by correcting the phase of the eigenvectors when solving the inverse modal problem.
The method developed in this work solves for the unknown damping and stiffness parameters at the cervical and lumbar areas of supine humans under vertical whole-body vibration using modal data that may inherit some errors. In this process, experimental motion data were first collected from human subjects and their modal parameters were identified. An eigenvector correction algorithm was introduced to reduce the error in the modal data and to ensure the right inter-connectivity structure in the stiffness and damping matrices that satisfy the equation of motion.
Methodology
Participants
The subject group for this study consisted of 11 male participants. The averages and standard deviations of the age, height, and weight of these subjects are 23.09 ± 3.70 years, 1.78 ± 0.06 m, and 75.75 ± 8.65 kg, respectively. The experimental protocol was approved by the University of Iowa Institutional Review Board prior to the testing.
Experiments
The subjects were exposed to vertical excitation, a sine-sweep vibration with increasing power using a motion simulator (Moog ECU-624-1800; Moog-FCS, Ann Arbor, MI, USA). Subjects lay freely on a rigid platform on top of a thin rubber mat to avoid slippage on the metal surface of the platform as shown in Figure 1. Vertical translational vibration motions (frequency range of 0.5–20 Hz and RMS magnitude of 2.0 m/s2) transmitted to the subject’s head, chest, pelvis, and lower leg regions were measured using inertial sensors. 22
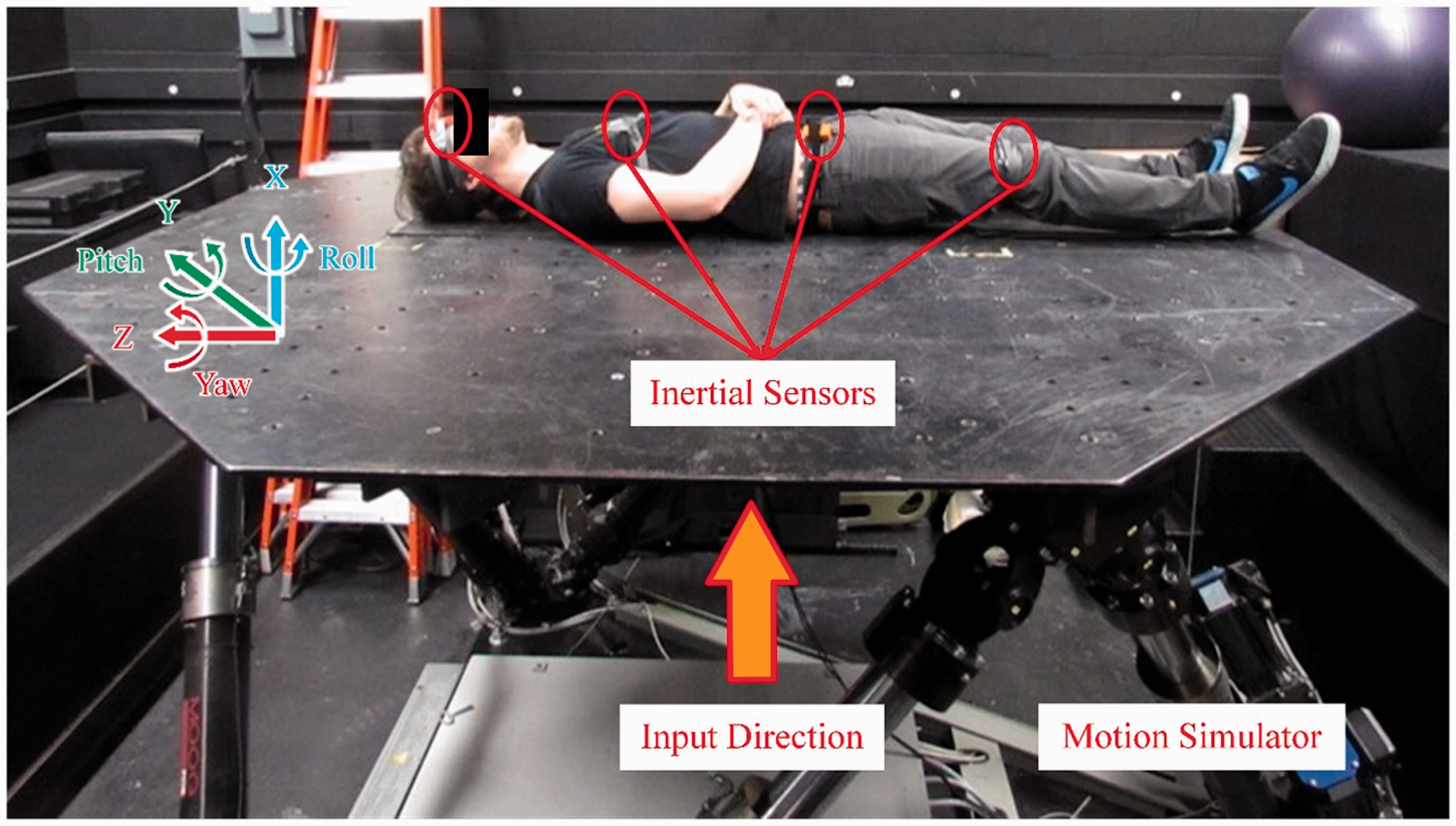
Details of supine-human testing: the human subject lay on the rigid platform of the motion simulator, and vibrations were generated in the vertical direction. Four sensors were attached to the human-body. The sensor on the head was placed on the forehead, just between the eyebrows. The sensor on the chest was attached at the flattest location of the sternum. The sensor on the pelvis was attached to a belt tightened over the left anterior superior iliac spine. The fourth sensor was attached to the leg above the patella of the left knee.
Data collection and analysis
Four wireless inertial sensors (MTw; Xsens Technologies, Enschede, Netherlands) were used to measure the motion at the different segments of the supine human, including the head, chest, pelvis, and legs. A fifth sensor was attached to the rigid surface of the motion platform and used as a reference for the input motion. The sensors were adhered to the human body using double-sided tape and were further secured by banded strips of athletic and duct tapes. The MTw sensor recorded motion data at 60 frames per second to a desktop computer, then trimmed and post-processed it using a low-pass filter at 28 Hz. The orientation of sensors along the axis of excitation was corrected using a methodology described in a previous work. 22
Experimental modal analysis
Experimental modal analysis was conducted on the data collected from the 11 human subjects. Traditionally, experimental modal analysis can be done in the frequency or time domain. Modal analysis in the frequency domain is normally presented in terms of transfer functions that correlate the input force/motion with the output motion. The modal analysis in the time domain is conceptually similar to that in the frequency domain, as both domains are based on the concept of a transfer function. A description of the theoretical background behind the modal analysis in the frequency and time domains is beyond the scope of this work and can be found in many publications.23–28 Modal analysis in the time domain was used in this work to calculate the modal parameters (natural frequencies and mode shapes) of the supine human subjects. Table 1 shows the resulting undamped natural frequency, the damping ratio, and the damped natural frequency of the 11 subjects under investigation.
Average and standard deviation (STD) of the undamped natural frequencies, damping ratios, and damped natural frequencies of the head, chest, pelvis, and legs of the 11 supine human subjects with their STD.
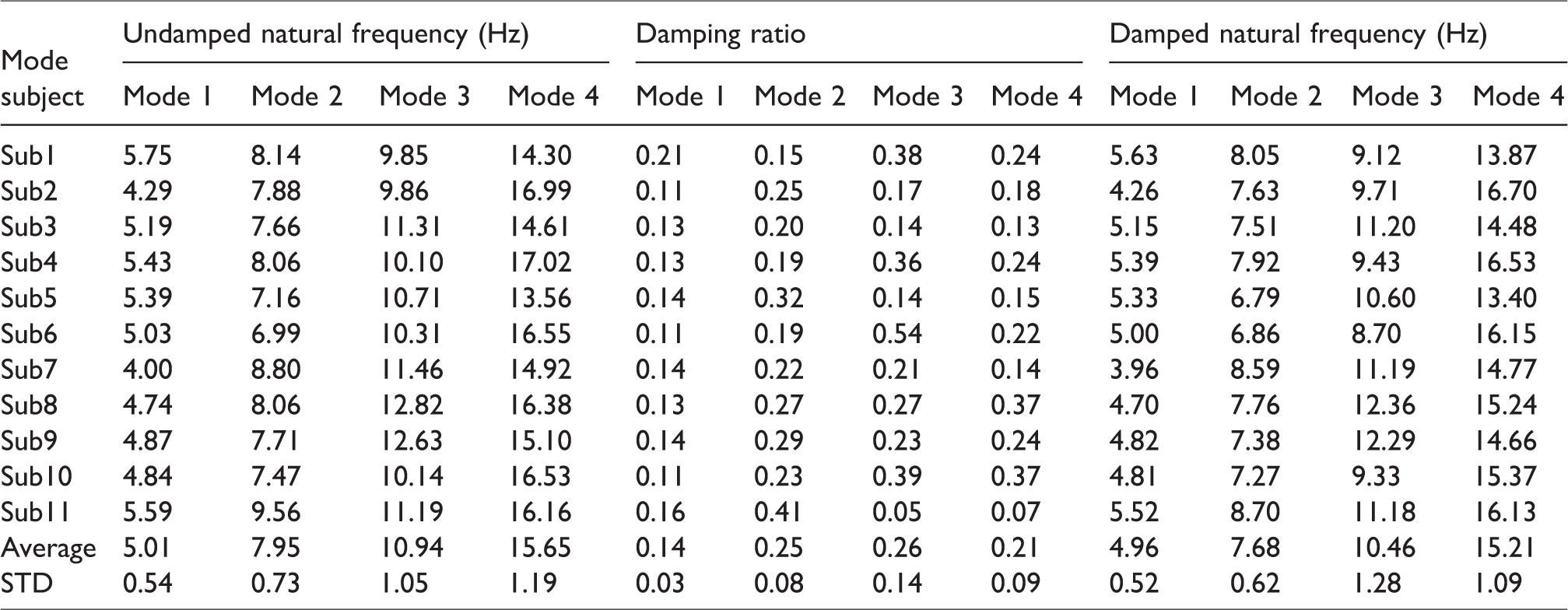
Figure 2 shows the resulting mode shapes of the 11 tested subjects at the different segments on the human body. The vertical axis represents the magnitude of the component of each modal shape. The horizontal axis represents the location at the head (1), chest (2), pelvis (3), and leg (4) segments, respectively. In this figure, the geometric mean of modal shapes is also given by a black solid line. Besides, the geometric standard deviation (GSTD) factor 29 is adopted for each mode shape to quantify and reflect the variations between the different subjects. In Figure 2, the error bar, ranges from the geometric mean divided by GSTD factor to the geometric mean multiplied by GSTD factor, is plotted for each component of the mode shapes. It is clear to observe that at Mode 1 and Mode 2, there are lower variations between the subjects as compared to the larger variations at Mode 3 and Mode 4.
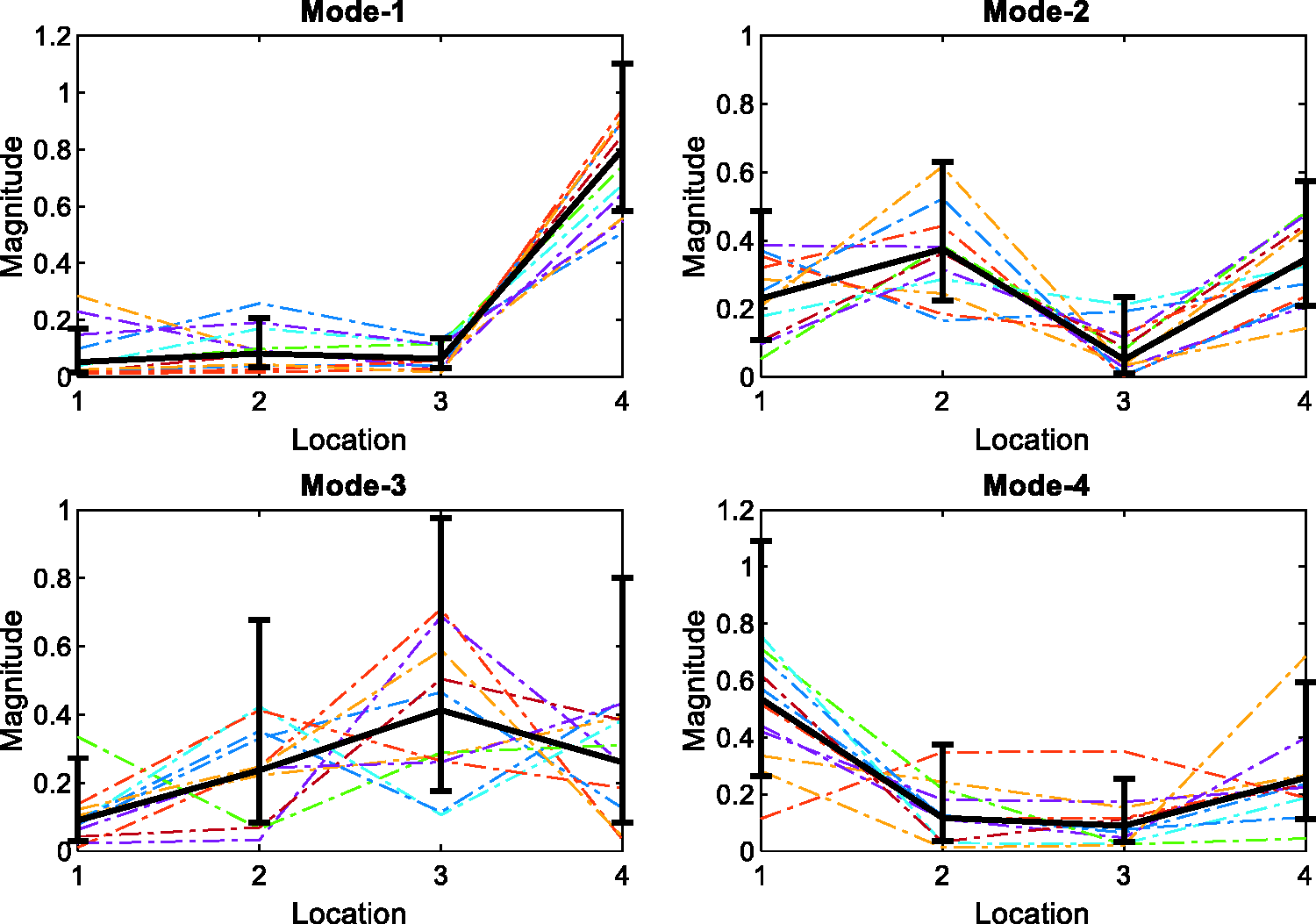
Mode shape components at the head (1), chest (2), pelvis (3), and leg (4) at the four resonance frequencies. Dashed lines represent the individual subjects, and solid lines represent the geometric mean of the subjects. The error bars represent the variation in the data, where the upper limit presents the multiplication of the geometric mean by the GSTD factor, and the lower limit presents the ratio of the geometric mean divided by the GSTD factor.
Inverse modal problem
Theoretical background
The equation of motion for a vibrating underdamped system with N DOF can be written as

The mass matrix
The equation of motion is a differential equation that can be transformed to the algebraic form

It is assumed that all eigenvalues are complex and simple (non-repeated). A transformation is presented in equation (3) that takes the complex-value eigenpairs into real-value eigenpairs.
30

The relationship between the new real-value eigenpairs 

The superscript H means Hermitian transpose.
Equation (2) can be written in terms of the real-value eigenpairs

The semi-definite programming approach (SDP) was used in this work to solve the inverse modal problem of equation (6) for
Supine human model
A multi-DOF human model is used in this work as a basis for the computational analysis and for validation purposes. The results of the experimental modal analysis (Table 1 and Figure 2) suggested that the supine humans demonstrated four recognizable resonance frequencies in the vertical direction, in the frequency range of 0.5–20 Hz. This information gave a guideline on the number of DOF that the supine human can have under this condition. Based on these results, a human model with four DOF is presented as shown in Figure 3.
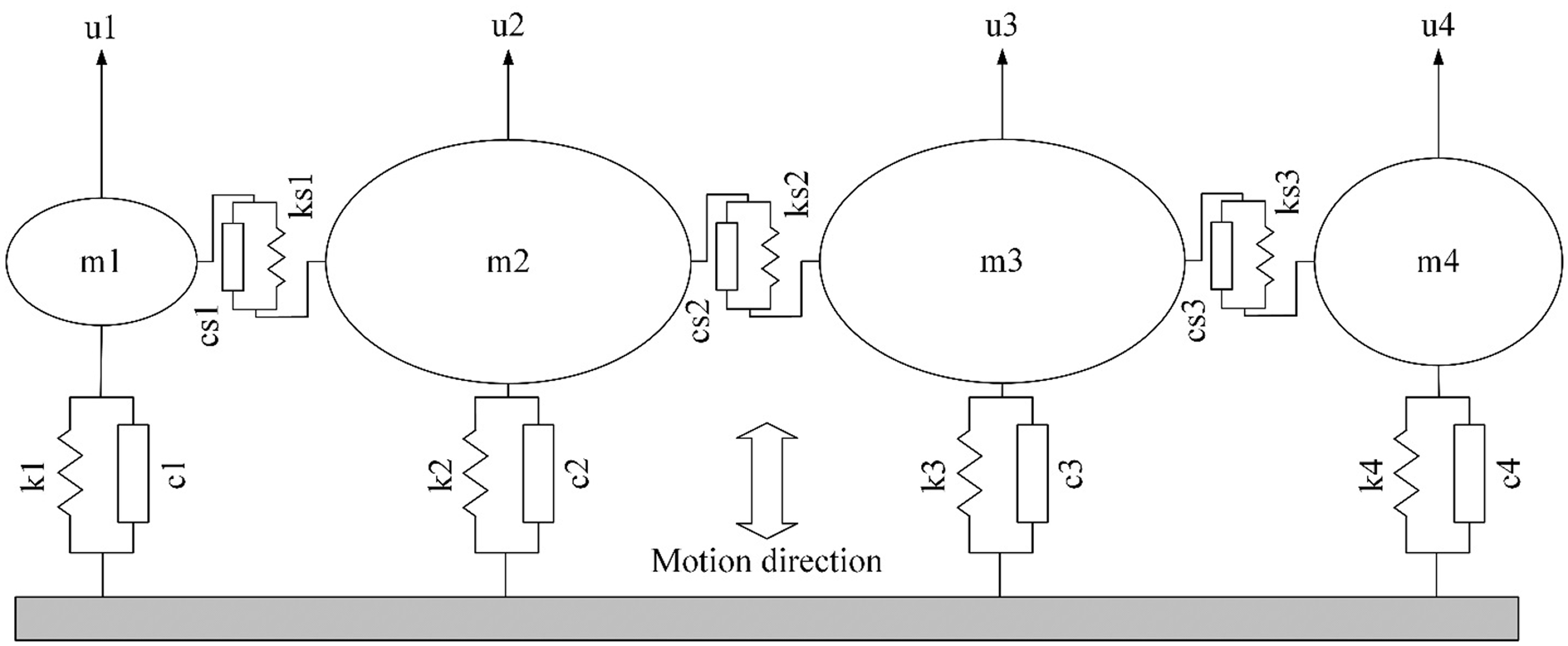
A four-degree-of-freedom multi-body model of a supine human under vertical whole-body vibration.
In this model, m1, m2, m3, and m4 represent the mass of the head, chest, pelvis, and legs, respectively. k1, k2, k3, and k4 represent the stiffness of the interface between the human body and the rigid support surface. c1, c2, c3, and c4 represent the damping coefficient of the interface surfaces. ks1, ks2, and ks3 represent the stiffness, in the vertical shear direction of the joints between the head and chest, chest and pelvis, and pelvis and legs, respectively. cs1, cs2, and cs3 represent the damping of the latter joints. The individual masses of the model are allowed to move in the vertical direction only in response to the input vertical vibration.
The unknown mass matrix 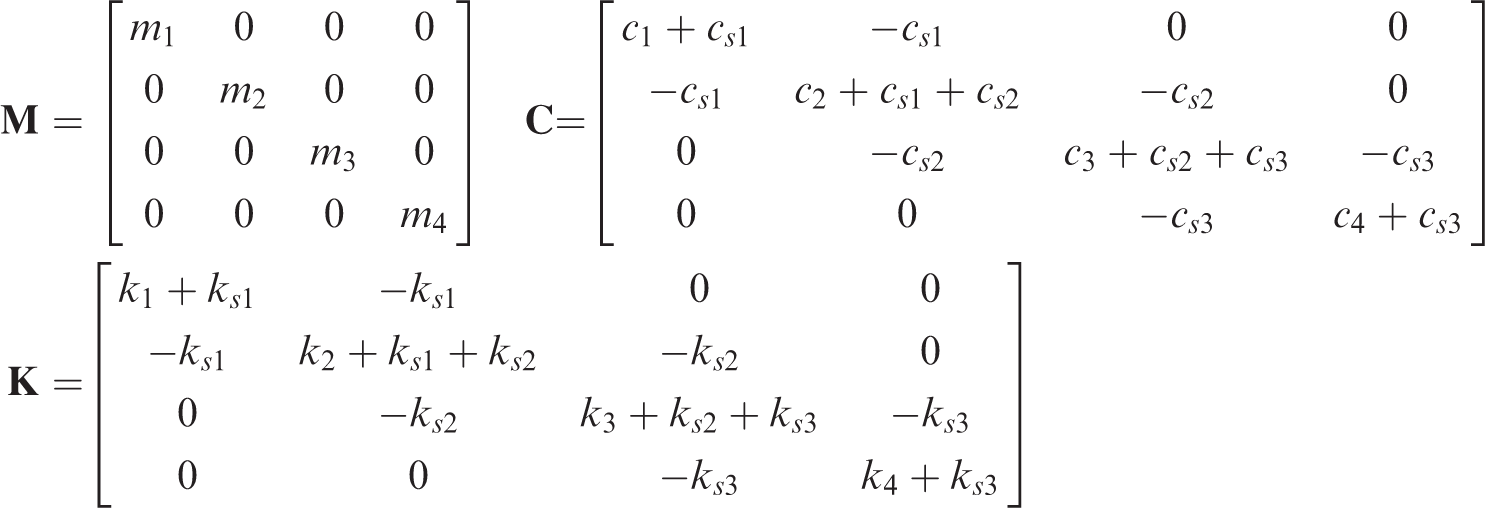
Solution of the inverse modal problem for the physical parameters
Two nested optimization problems are solved [21] with the goal of minimizing the error between the calculated transfer functions (
In the inner problem, SDP solves an optimization problem to predict the values of
The inner optimization problem is then defined as follows:
minimize
subject to:
and the following constraints on the mass magnitude:

The upper and lower constraints on the different masses (a1, a2, b1, b2, c1, and c2) of the human body were selected based on the relationship between the different masses of the human body and the mass distribution. 33 The normalized value of the first diagonal element in the mass matrix (M11) is assumed to be known (the mass of the head for example). The values of other elements in the mass matrix (the masses of the chest and pelvis) are not known but their ratio to M11 can be estimated based on values of (a1, a2, b1, b2, c1, and c2).
While it is expected that the first round of the inner optimization problem solution will produce values for
The outer optimization problem is defined as

All computations were done in the MATLAB optimization toolbox. Figure 4 shows a flow chart of the solution steps. The final solution for the physical parameters will be achieved when the number of optimization iterations exceeds 50 or the magnitude of
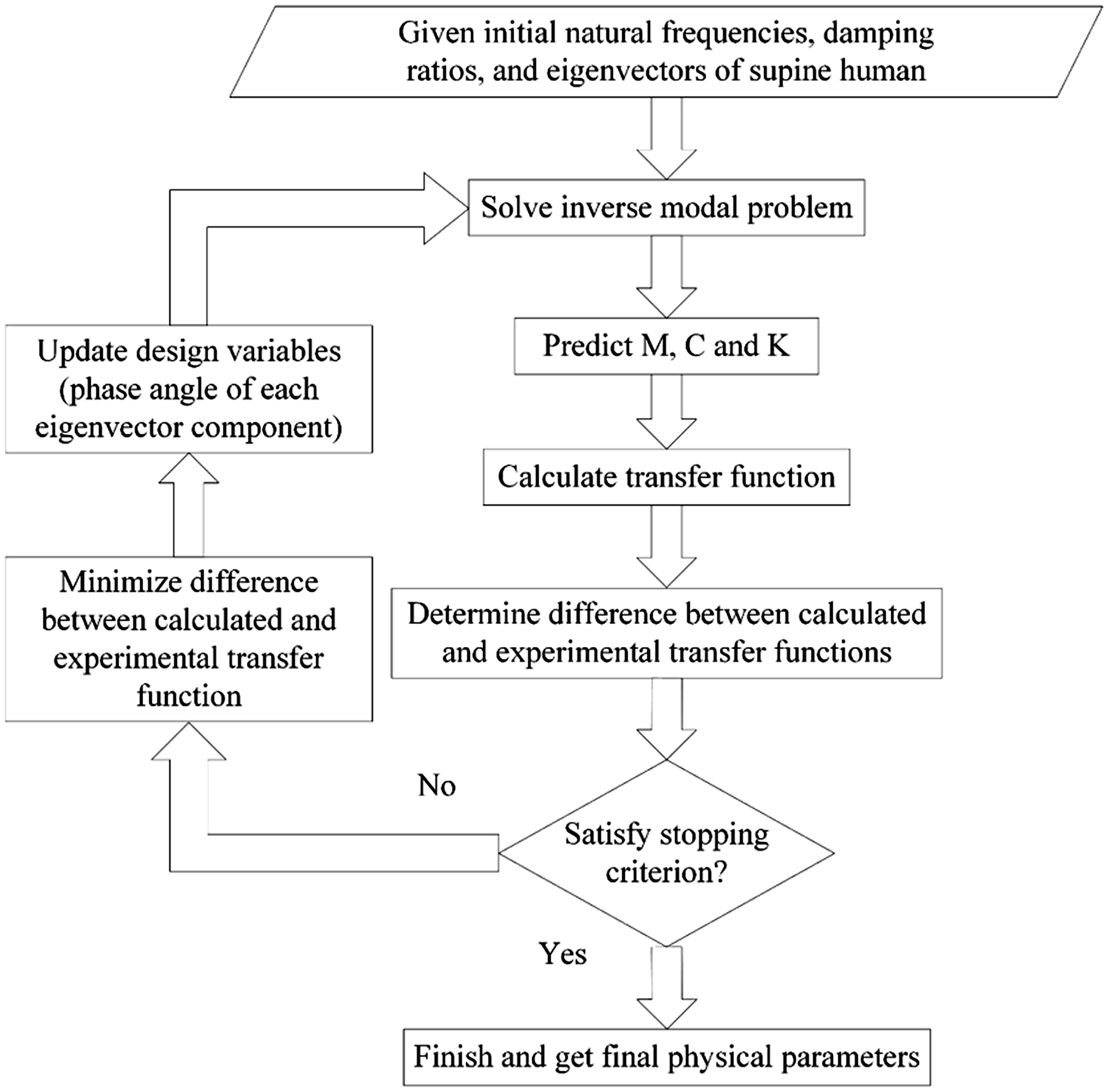
Flow chart showing the solution algorithm.
Results
Figure 5 shows an example of the polar representation of an eigenvector of this four-DOF system before and after the correction of the eigenvector. Each arrow inside the circles represents the magnitude and phase of each component of an eigenvector. Figures 5(a) to (d) show the four modes before the correction of the eigenvector, while Figure 5(e) to (h) show the four modes of resulting system after the correction of the eigenvector.
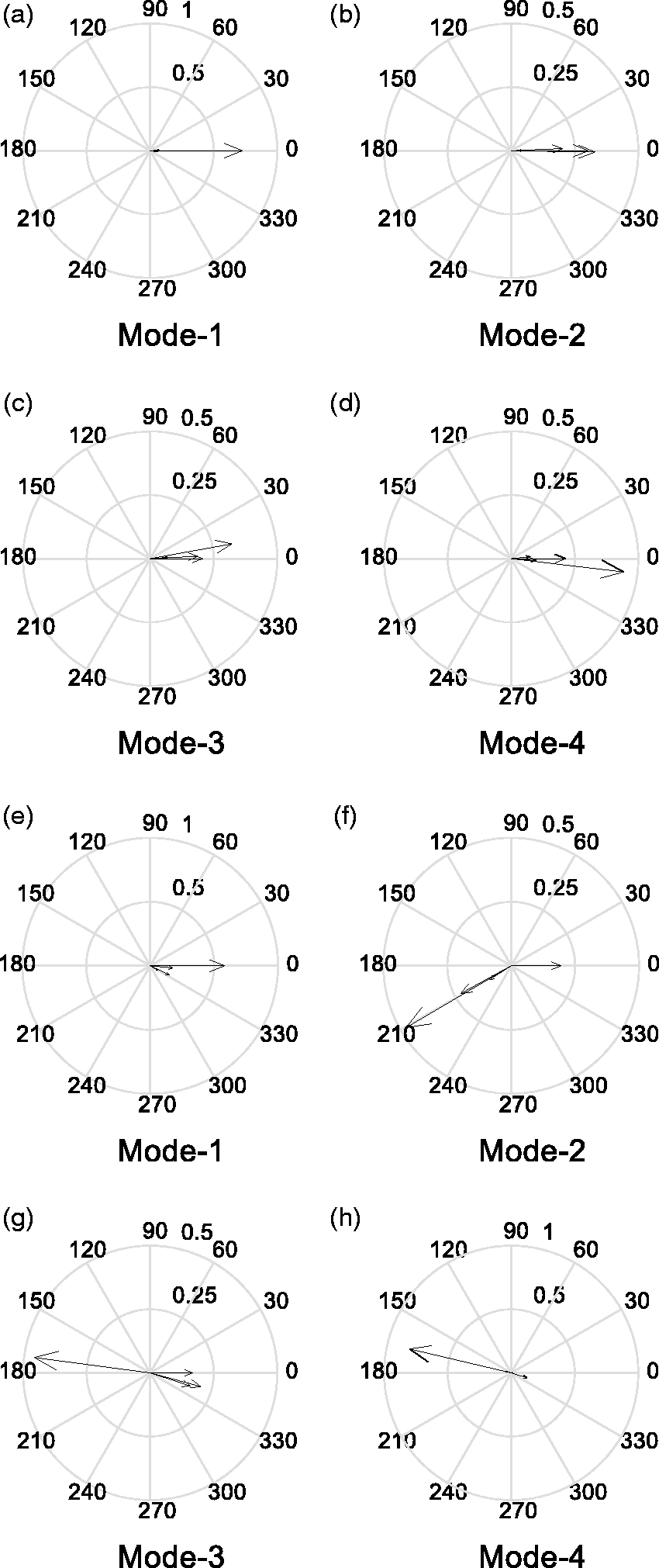
Phase and magnitude of the components of the eigenvectors of the four-DOF system in the polar plane before and after the phase correction: (a) Mode 1 before, (b) Mode 2 before, (c) Mode 3 before, (d) Mode 4 before, (e) Mode 1 after, (f) Mode 2 after, (g) Mode 3 after, (h) Mode 4 after.
The average weight (75.75 kg), the average natural frequency, the average damping ratio, and the geometric mean of the four mode shapes of the 11 subjects were used as bases for the comparison with the predictive (calculated) model. The magnitudes of the experimental and calculated eigenvectors predicted by the model are shown in Figure 6.
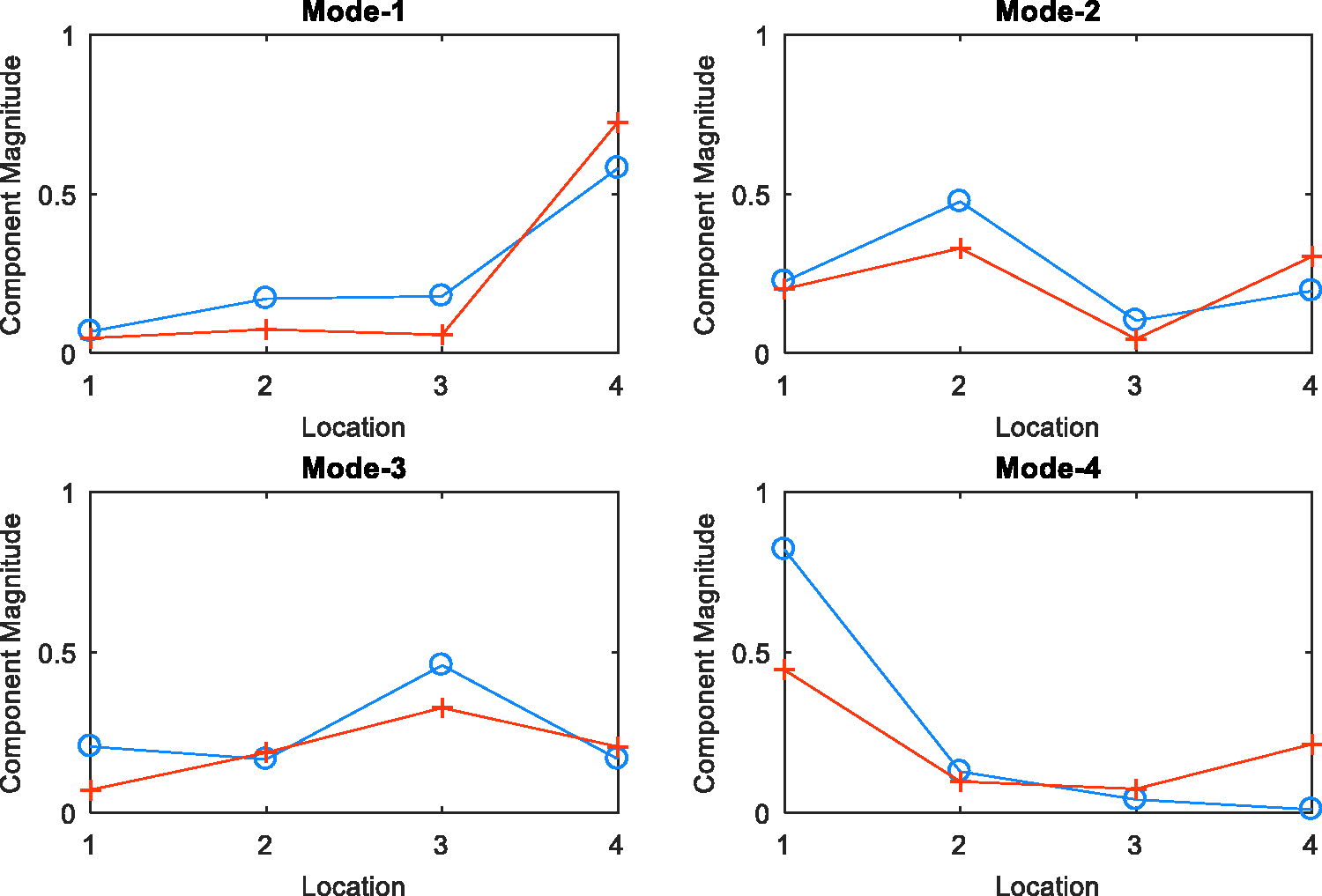
Magnitude of the experimental and calculated eigenvectors (○ - calculated, + - experiment).
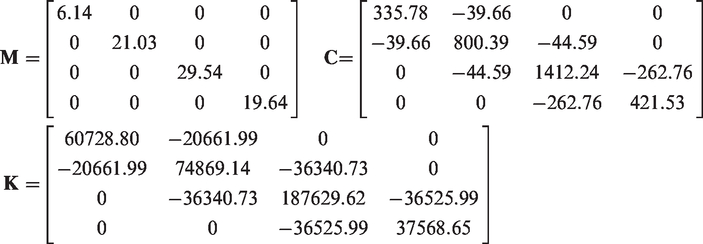
The results of the proposed solution method showed the following values for the damping and stiffness matrices.
Validation
The human model, using the resulting stiffness and damping parameters, was tested under vertical random input vibration, and the results were compared with data collected from a new human subject that was not used in the modal analysis. As can be seen in Figure 7, the response of the human model (predicted motion) at the head, chest, pelvis, and legs was very comparable to that of the experiment.
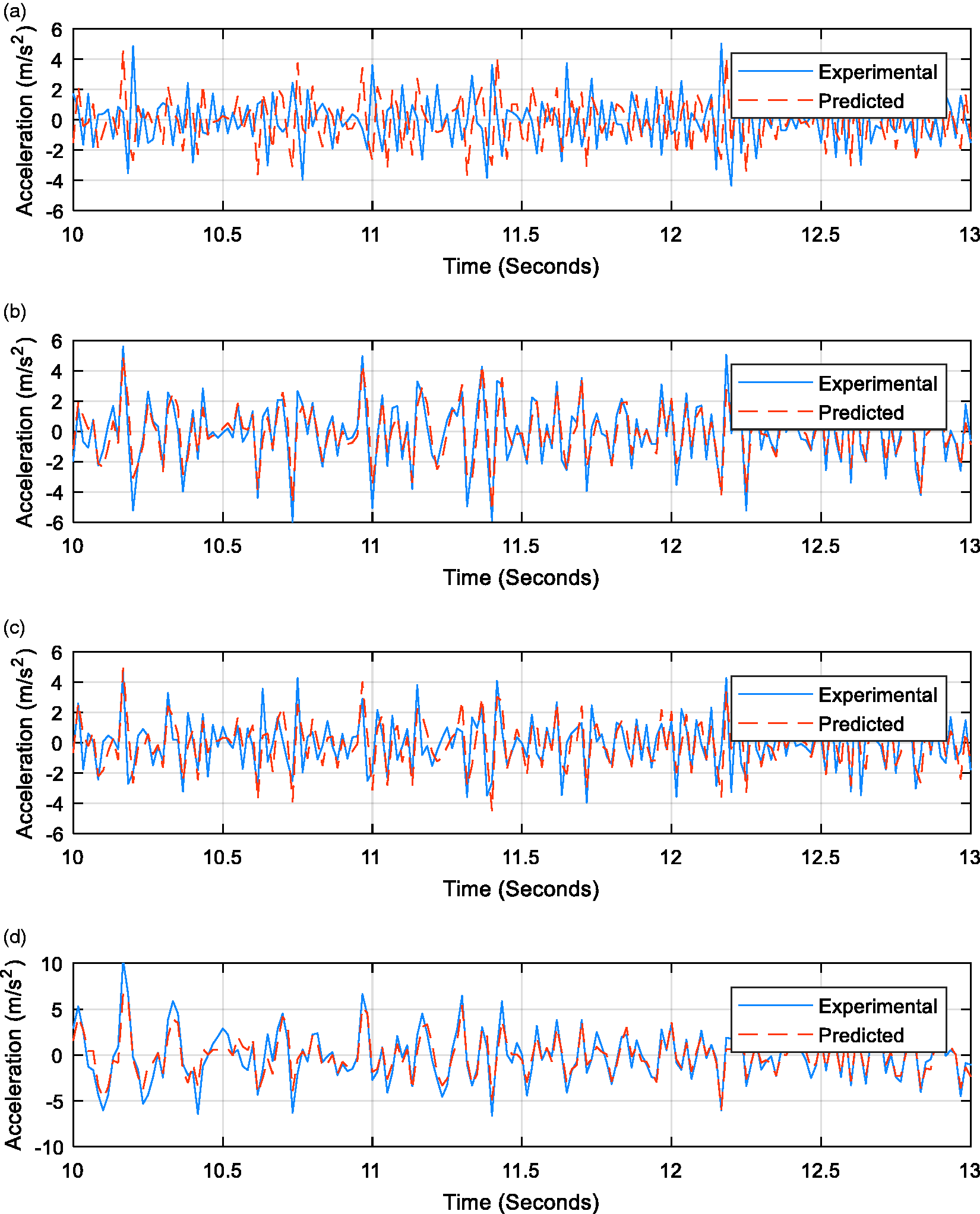
Relative body-segment accelerations to the rigid platform of the motion simulator of the experimental and predicted responses of a new subject in the range of 10-13 seconds for random input at (a) the head, (b) the chest, (c) the pelvis, and (d) the legs.
Discussion and conclusions
A methodology is presented in this work to estimate the physical damping and stiffness parameters at the cervical and lumbar regions of supine humans under vertical whole-body vibration while reducing the error in the modal data due to experimental and environmental noises. The major contribution of the proposed methodology, as compared to the current methods in the literature, is the capability of the method to reduce the effect of noises in the information available in the modal data while solving for the physical parameters. In addition, the method imposes constraints that ensure the right inter-connectivity structure of the physical matrices; preserve the out-of-diagonal zero elements in the physical matrices; preserve the positive and semi-positive definite of the mass, stiffness, and damping matrices; and satisfy the equation of motion. Moreover, a non-proportional damping was used in the analysis rather than the proportional damping that is traditionally used in the literature. With these contributions, it is expected that the method will result in physical properties that have physical meanings and values that are close to those of the humans.
The modal analysis presents a realistic guide 34 for determining the number of DOF that are required to model a supine human. In this work, the experiments were clear in pointing out four main resonance frequencies in the range of 0.5–20 Hz. Therefore, a four-DOF model was used to represent how the supine-human body responds to vertical vibration. It should be noted that modal analysis can induce high uncertainly and variation in the predicted higher modal parameters when the transfer functions have low energy at higher frequencies.
Normally, non-proportional damping is more general than proportional damping and it generates complex modal parameters. Because the damping characteristics of the human body are not known, a more general non-proportional damping assumption is used in this study. The results of this work support that assumption. While a similar claim can be applied to structures that exhibit very low damping, many people may prefer to work with the proportional damping assumption as the damping may generate very small delay and have small effect on the phase properties. However, the assumptions of proportional damping may lead to a loss of phase information and ultimately lead to inaccurate physical values when used on biological systems. The use of complex modal parameters in this work is very important and is an obvious addition to the human response to whole-body vibration, as the human body has considerable damping that might not be captured using a proportional model.
The comparison between the resulting predicted modal parameters and the experimental ones has shown reasonable agreement, except with the damping ratio at the first mode. The calculated transfer functions were close to those of the experiments at the different masses. The comparisons between the predicted acceleration of the model at the different locations have shown a very close trend to those of the experimental data.
Considerable work has been done in the literature toward measuring the stiffness parameters at specific areas of the cervical and lumbar spines, mostly on cadaver or animal models.35–39 Lu et al. 40 reported 583,800 N/m in anterior shear stiffness, 469,000 N/m in posterior shear stiffness, and 135,000 N/m for the disc alone; Skrzypiec et al. 41 reported 565,000 N/m in anterior shear and 366,000 N/m in posterior shear; Schmidt et al. 42 reported 490,000 N/m in the posterior–anterior direction and 110,000 N/m for the disc alone. These reported stiffness values were larger than the values presented in other reports.35–39 These comparisons give an idea of the large range in the stiffness parameters in the literature. Therefore, it is not recommended to compare those values with the results of this work, as most data presented in the literature were based on the properties of vertebras of smaller regions where the muscles, tissues, damping, and other living human materials that contribute to the shear stiffness of human joints were not considered.
The current ISO 2631–1 43 can be applied to the evaluation of health risk of seated persons, where the vertical whole-body vibration transmitted to the human through the supporting/contact surfaces is in the direction of the spine. However, according to Section 7 (Health) in ISO 2631–1, the effects of vibration on the health of recumbent persons are not known. It may be relevant to mention here that one major limitation of the current ISO 2631–1 is in it’s dependency on the input vibration to the human body and not on the output motion of the individual segments of the human body. This limitation could be attributed to the difficulty of measurements at the time when the standard was published. Thus, the results presented in the current work, where the output motion of the individual segments can be predicted from the input motion, may have important role on the health risk evaluation in future standards.
To the authors’ knowledge, the damping parameters at the cervical and lumbar spines of humans in vivo are not available in the literature. The proposed methodology has the potential to be used to predict the physical properties of smaller regions on the spine when appropriate detailed measurements with dense sensors are available. It should be noted that the proposed method predicted the stiffness and damping in the shear direction only and therefore may have limited applications. However, the method presents a new approach that can be extended in the future to predict stiffness and damping parameters of humans in different directions.
Footnotes
Acknowledgements
The authors would like to thank Dr Jonathan DeShaw and Ulysses Grant at the Center for Computer-Aided Design (CCAD) at the University of Iowa for their technical help with the data collection.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.