Optimal design of reduced-order observers with specified eigenvalues and performance measurement of minimizing estimation errors using evolutionary optimization
Open accessResearch articleFirst published online June, 2019
Optimal design of reduced-order observers with specified eigenvalues and performance measurement of minimizing estimation errors using evolutionary optimization
A new method is proposed in this paper which designs a reduced-order observer of a non-observable-form-based dynamical system such that: (i) the eigenvalues are specified to satisfy desired convergence performance, (ii) a full-rank condition is satisfied, and (iii) a quadratic performance measurement of the deviation of the estimates from the actual states is minimized so as to reduce the large error occurring during the transient period of observation. The proposed approach combines the merits of both the orthogonal functions approach and evolutionary optimization. By solving a Sylvester equation, the proposed optimal design method can not only be used to design the reduced-order observer of a non-observable-form-based dynamical system, but also can avoid the shortcomings of approaches already existing in relevant literatures. Two examples are given to demonstrate the effectiveness and efficiency of the proposed new optimization method on the performance of state estimations. From the demonstrative examples, it can be seen that the estimated state errors asymptotically converge quickly to zero. In addition, the performance measurement values based on the proposed optimal design approach are apparently much lower than those based on the existing nonoptimal design method.
Control systems are used to regulate system output in an enormous variety of machines, products, and processes. In particular, the main idea behind the state feedback control theory is based on having sensors to measure the quantity under control. Namely, all the state variables are assumed to be available outputs. In fact, for the dynamic control systems, the state variables are not accessible to direct measurement, or the number of measurement devices is limited, possibly due to total cost considerations. As a result, in order to exploit state feedback, it is essential to find a mean to estimate the states. Thus, an important problem in linear multivariable control systems is to design an observer for a given dynamic system. Therefore, many researchers have proposed various methods for observer design.1–23In order for the estimated states to be close and quickly converge to the actual states of the observed system, the primary consideration is that the real parts of the eigenvalues of the observer should be chosen to be more negative than those of the observed system.7As such, many researchers design observers in terms of the asymptotic sense. Although the asymptotic principle can be applied to improve the convergence of the estimated states by choosing the eigenvalues of the observer with a sufficiently negative real part, the design result is not satisfactory due to the fact that a large estimation error may occur during the transient period of observation.13–15Several previous studies have been devoted to coping with the design issue of reducing the large estimation error occurring during the transient period of observation.12–17The reduced-order observer reduces the order of the observer by using the sensed outputs. To the authors’ best knowledge, to date, only Kung and Yeh13as well as Horng and Chou14,15have studied the problem of transient estimation performance improvement for “reduced-order observers.”
There are two different approaches in designing reduced-order observers.18,19One design method requires the dynamical equation in an observable form, while the other design approach does not require so. Based on the dynamical system in an observable form, Kung and Yeh13as well as Horng and Chou14,15studied the problem of transient estimation performance improvement for the “reduced-order observer of an Observable-Form-Based dynamical system (OFB-reduced-order observer).” However, the methods proposed by Kung and Yeh13as well as Horng and Chou14,15cannot be applied to deal with the design issue of the “reduced-order observer of a Non-Observable-Form-Based dynamical system (NOFB-reduced-order observer).” On the other hand, it merits attention that when the number of outputs is greater than the number of unmeasurable states, the approaches presented by Kung and Yeh13as well as Horng and Chou14,15cannot be utilized to uniquely determine the observer gain matrix of a linear optimal OFB-reduced-order observer. The reason is that after the eigenvalues are assigned, in the works of Kung and Yeh13as well as Horng and Chou,14,15the degree of design freedom remaining is not fully utilized.
Many dynamical systems are not in observable forms, thus state feedback control cannot be implemented by designing an OFB-reduced-order observer to provide the estimated states. Transforming a NOFB-dynamical equation into a multivariable observable form is not numerically simple nor is it a considerably easy task.18,19Furthermore, the estimated states obtained from the OFB-reduced-order observer of a transforming-into-observable-form-based dynamical system are not the estimates of the original system states. As a consequence, the estimated states cannot be directly utilized for the state feedback control. On the other hand, the NOFB-reduced-order observer does not require the dynamical equation to be in the observable form, and the estimated states can be directly used for the state feedback control. Therefore, some researchers have worked on the design problem of an NOFB-reduced-order observer.3,19–22However, to the authors’ best knowledge, there are no existing literatures focusing on the issue of transient estimation performance improvement for the NOFB-reduced-order observer. Therefore, the aim of this paper is to study the NOFB-reduced-order observer design problem by simultaneously considering the following two design issues: (i) the eigenvalues are specified to satisfy desired convergent performance, and (ii) a quadratic performance measurement of the deviation of the estimates from the actual states is minimized so as to reduce the large error occurring during the transient period of observation.
The rest of the paper is organized as follows. The next section describes the problem statement. A new method which designs an optimal NOFB-reduced-order observer is proposed in “Optimal NOFB-reduced-order observer design” section. Two illustrative examples are provided in “Illustrative examples” section. The final section offers some conclusions.
Problem statement
Consider a linear time-invariant system described by
where the pair (A, C) is observable; is the -dimension state vector; is the control vector of -dimension; is the -dimensional output vector; A, B, Care constant matrices with appropriate dimensions; and Cis the full rank of m.
The outputs of are used to determine states of the and a reduced-order observer of order is designed to estimate the rest of the state variables. Since Cis full rank of m, the equation can be used to solve the mstates of the in terms of the and the remaining state variables.
All estimated states which are the estimates of can be recovered by applying the following equation3,19,20
and by using an -dimensional NOFB-reduced-order observer constructed as follows3,19,20
where Kis a matrix of -dimension, Gis a matrix of -dimension, His a matrix of -dimension, and is the -dimensional vector
and Fis the NOFB-reduced-order observer gain matrix to be designed. By solving the Sylvester equation in equation (6), Kcan be obtained. Note that when choosing matrix F, the following full-rank condition must be satisfied3,19,20
In this paper, the reduced-order observer gain matrix Fto be searched for must (i) have eigenvalues specified to satisfy desired convergence performance, (ii) satisfy the full-rank condition in equation (7), and (iii) have a minimized quadratic performance measurement of the deviation of the estimates from the actual states for reducing the large error occurring during the transient period of observation. The NOFB-reduced-order observer gain matrix Fis designed so that all of its eigenvalues have negative real parts.
The error vector of state estimation is defined as
A quadratic performance measurement of the estimation error is defined as
where the matrix Qis a positive definite weighting matrix, denotes the transpose vector of e(t), and is the large enough final time for e(t) to decrease to near zero. The performance measurement Jcan be expected to give a response for reducing the large error occurring during the transient period of observation.
The problem of NOFB-reduced-order observer design is to find the reduced-order observer gain matrix Fsuch that (i) the eigenvalues of matrix are specified in the desired locations with negative real parts, (ii) the full-rank condition described by equation (7)is satisfied, and (iii) the quadratic performance measurement of equation (9)is minimized.
Optimal NOFB-reduced-order observer design
The orthogonal functions approach (OFA) has been successfully applied to study a variety of problems in systems and control.24–26The key feature of the OFA is that it converts differential and integral equations into algebraic equations. Consequently, the OFA has become quite popular computationally, as the dynamical equations of a system can be converted into a set of algebraic equations whose solution leads to the solution of the original problem.24–26Therefore, the OFA is adopted in this paper. Assume that all elements of x(t), u(t), and z(t) are, respectively, capable of being absolutely integrated in the time interval [0, β]; then, for the interval [0, β], vectors x(t), u(t), and z(t) can be developed approximately in terms of truncated orthogonal function (OF) representations as
where qis the number of the terms required for the OF; denotes the OF basis vector; are the OFs; , and denote, respectively, the , , and coefficient vector; and finally , and denote, respectively, the , , and coefficient matrices. From equation (12), it can be obtained that with .
Using the OF representations of x(t) and u(t) in equations (10)and (11), and applying the following integral property of the OF27
where is an known matrix, and Pis the operational matrix of integration for the OF, in which is the vector, and the entries of matrix Pdepend on the particular choice of the OF basis vector T(t).27
Using the Kronecker product, the solution of from equation (14)can be obtained as
where , is the identity matrix, ⊗ denotes the Kronecker product,28and .
Using the same aforementioned procedure, equation (4)can be cast into the form
where is the matrix, and Siis the vector. By using the solution of Xobtained from equations (14)and (15), the solution of from equation (16)can be obtained as
where , is the identity matrix, and .
From equations (2), (3), and (14) to (17), vector can be approximated in terms of truncated OF representation as
where
Thus, from equations (10)and (18), the truncated OF representation of the error vector e(t) in equation (8)can be obtained as
where .
Now, substituting the truncated OF representation of the error vector e(t) in equation (20)into equation (9), the quadratic performance measurement of equation (9)becomes
in which and the constant matrix Wdenotes the product-integration-matrix of two OF basis vectors.29
Now, given a matrix Fhaving the desired eigenvalues, then using equations (5), (6), and (14) to (20), the quadratic performance measurement value of in the algebraic equation (21)can be obtained. Therefore, from these procedures mentioned above, it is obvious that given one matrix Fhaving the desired eigenvalues, then the value of the performance measurement can be calculated by the algebraic equation (21). Given another matrix F, we obtain another value of performance measurement. That is, the performance measurement value of algebraic equation (21)is dependent on the observer gain matrix F. Hence, the NOFB-reduced-order observer design problem becomes how to search for the observer gain matrix Fsuch that (i) the eigenvalues of matrix are specified in the desired locations with negative real parts, (ii) the full-rank condition described by equation (7)is satisfied, and (iii) the quadratic performance measurement of algebraic equation (21)is minimized. This means that, by using the OFA, the NOFB-reduced-order observer design problem can be replaced by an optimization problem represented by algebraic equations, thus greatly simplifying the design problem of the NOFB-reduced-order observer.
The genetic algorithm (GA), which is one of evolutionary optimization approaches, has received considerable attention regarding its ability as an effective optimization technique for complex problems and has been successfully applied in various areas.30–33Thus, the GA is adopted in this paper to deal with the complex problem of searching for the optimal solution to the optimization problem in equation (21), where equation (21)is a complex nonlinear function with the continuous variables.
Using GA, the initial population with the chromosomes of form is first randomly generated, where the fixed entries of Fare chosen to execute GA, and denotes the entries of matrix F. Assume that a designer has made the selection of the desired eigenvalues of the matrix Fto be then the desired characteristic polynomial can be expressed as
The remaining entries of matrix Fcan be obtained from equation (22)by using the exact same fashion as that given by Zak.20By solving the Sylvester equation in equation (6), the matrix Kcan be obtained, where the full-rank condition described by equation (7)must be satisfied. Then, by applying equations (14)to (20) for the solution of E, and by using the Jin the algebraic equation (21), which is the fitness function defined for the GA, the fitness values of the feasible population accompanying the remaining entries obtained from equation (22)are calculated. Next, by integrating equations (14)to (21), the GA, incorporated with the aforementioned method for solving the remaining entries of matrix F, is repeatedly adopted to find the optimal NOFB-reduced-order observer gain matrix Funtil the termination criterion is met.
Remark 1:The Sylvester equation might have an infinite number of solutions and each solution is a set of observer parameters for the system that should satisfy the observer equations. By using the stacking operator and Kronecker product,20the equation can be used to numerically solve the Sylvester equation in equation (6) for obtaining matrix K, where and are, respectively, the and identity matrices, as well as and denote, respectively, the stacking operators of matrices Kand GC.
Illustrative examples
Two examples are given in this section to demonstrate the efficiency of the proposed optimization method for designing the NOFB-reduced-order observer such that (i) the eigenvalues of observer gain matrix Fare specified to satisfy desired convergent performance, (ii) the full-rank condition described by equation (7)is satisfied, and (iii) the quadratic performance measurement of algebraic equation (21)is minimized for reducing the large error occurring during the transient period of observation. The hybrid Taguchi-genetic algorithm (HTGA) is one genetic-algorithm-based optimization. For the parameter optimization problems of the complex nonlinear functions with continuous variables, it has been shown that the HTGA method can obtain improved results regarding robustness than existing approaches.27,34Thus, the HTGA method is used here to design the optimal NOFB-reduced-order observers. The details regarding the HTGA can be found in Ho et al.27,34The following evolutionary environments of the HTGA are used in this section: the population size is 30, the crossover rate is 0.95, the mutation rate is 0.01, and the maximum generation is 100. The type of OF considered in this section is the shifted Chebyshev series.24,27,29
Example 1
Consider the sixth-order double-inverted system with four outputs described as35
In this example, the number of outputs is four. It can be seen that the first four states and can be directly obtained from the output and the remaining two states and are unmeasurable states. When the number of the outputs is greater than the number of unmeasurable states, after the eigenvalues are assigned, in the works of Kung and Yeh13as well as Horng and Chou,14,15the degree of design freedom remaining is not fully used. Thus, the methods proposed by Kung and Yeh13as well as Horng and Chou14,15cannot be utilized to uniquely determine the optimal gain matrix of the linear OFB-reduced-order observer. Here, the optimal design method proposed in this paper is adopted to construct a optimal NOFB-reduced-order observer. The specified eigenvalues for the NOFB-reduced-order observer gain matrix Fare –4 and –5, and let
In this example, and Applying the proposed optimal NOFB-reduced-order observer design method, the optimal NOFB-reduced-order observer can be obtained as
where
For the optimal NOFB-reduced-order observer, the value of Jis 0.0012.
The nonoptimal NOFB-reduced-order observer having the same specified eigenvalues –4 and –5 can be obtained by using the nonoptimal design method3,19–22to be
Where
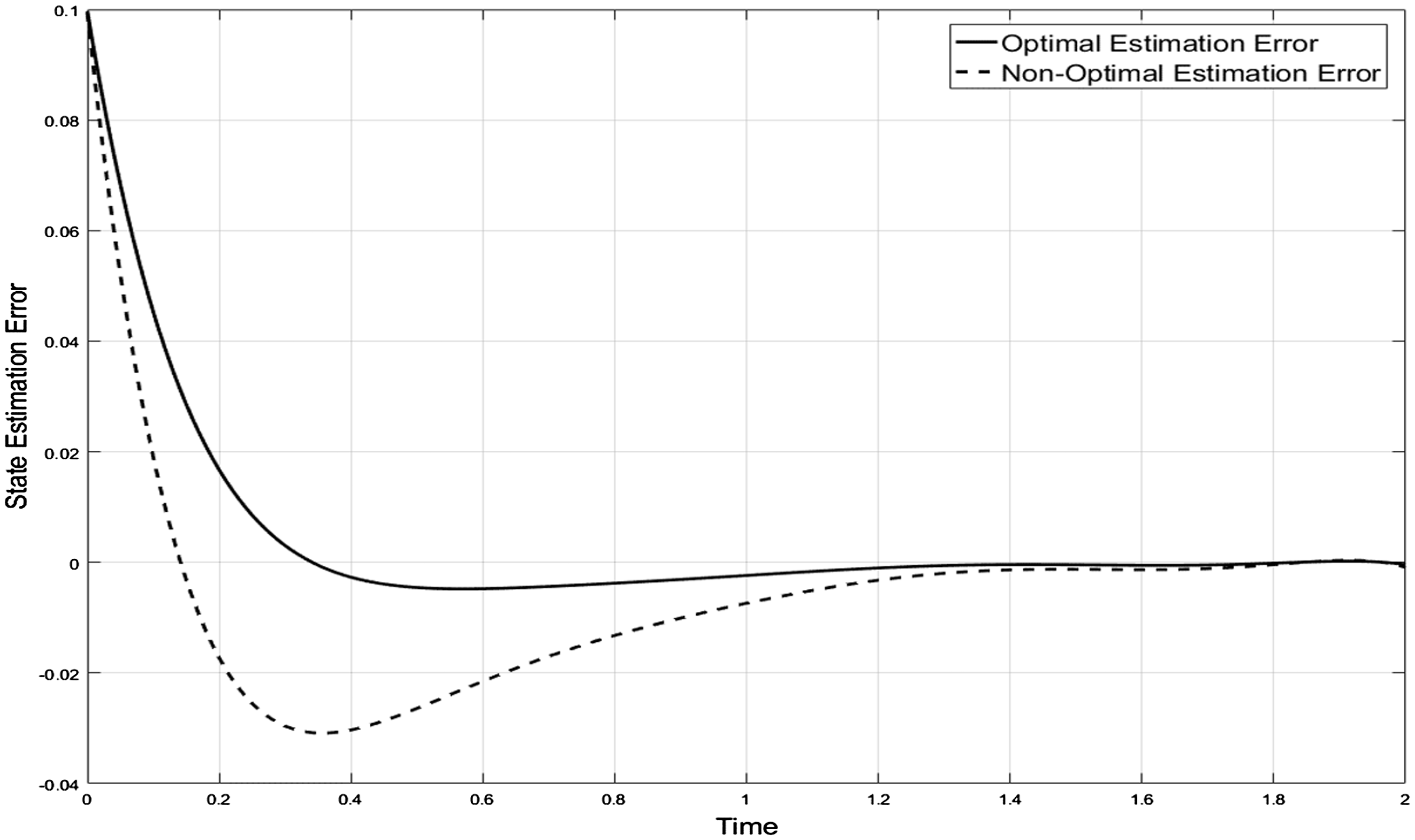
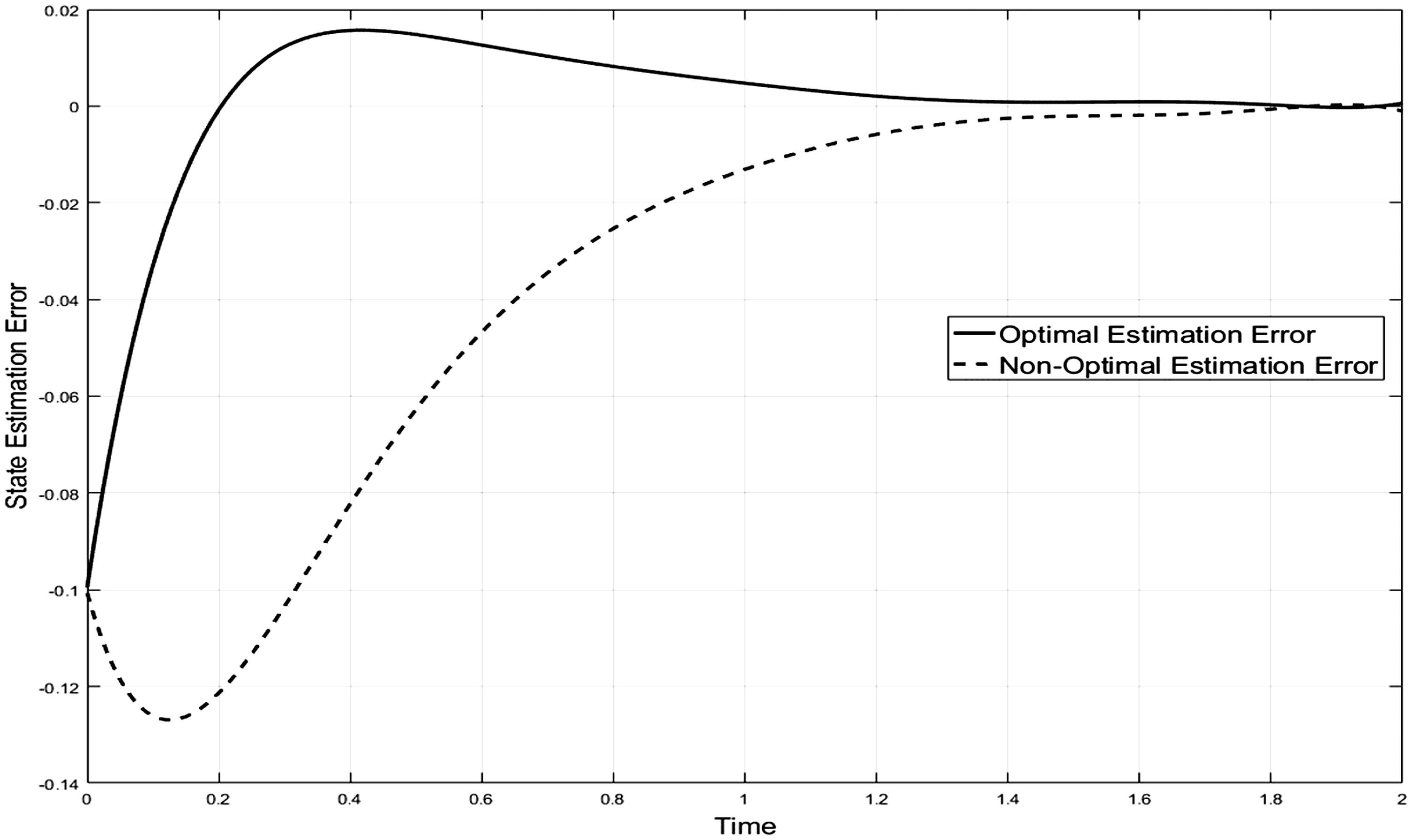
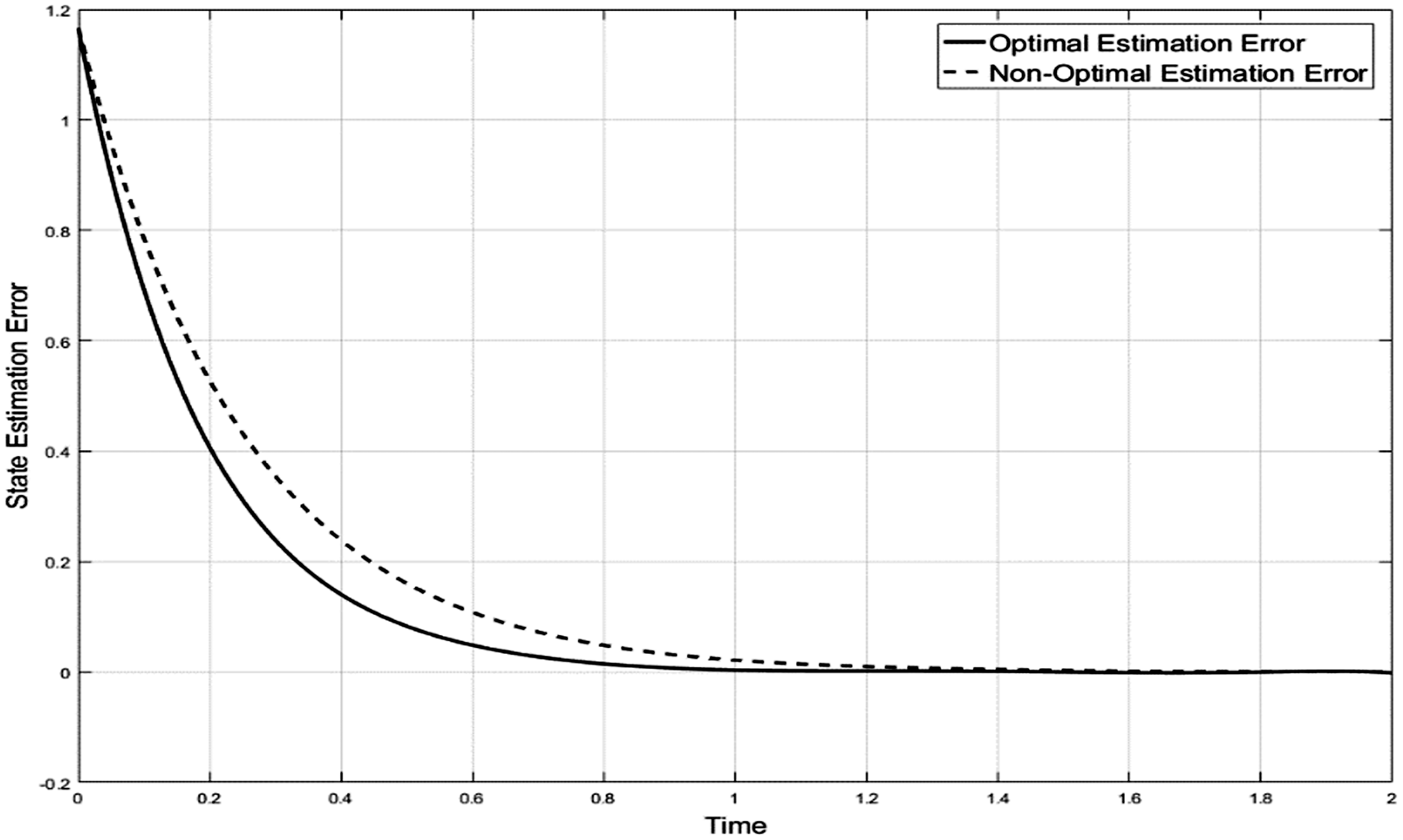
In addition, the value of Jis 0.0061. The comparisons of the state estimation errors and for the to-be-estimated states and of optimal estimation and nonoptimal estimation are given, respectively, in Figures 1and 2with It can be seen that, by using the proposed optimal design method, the estimated state errors can converge fast to zero; clearly the transient estimation errors have been substantially decreased. Furthermore, the performance measurement value Jbased on the proposed optimal design method is 80.3% lower than that based on the existing nonoptimal design approach.3,19–22
A comparison of state estimation errors for the state of optimal estimation and nonoptimal estimation, respectively (Example 1).
A comparison of state estimation errors for the state of optimal estimation and nonoptimal estimation, respectively (Example 1).
Example 2
Consider a fourth-order system described by equation (4), in which there are two outputs.
The dynamical system described by equation (29)is not in an observable form. Thus, one cannot design an OFB-reduced-order observer to provide the estimated states. Transforming the NOFB-dynamical system described by in equation (29)into a multivariable observable form is not a simple task. Even though the transformation has been executed such that the NOFB-dynamical system described by equation (29)is transformed into a multivariable observable form and the estimated state of the transforming-into-observable-form-based dynamical system is the original state and are nevertheless not the estimates of the original system states and . As such, the estimated states and cannot be directly adopted for the state feedback control. Therefore, a second-order optimal NOFB-reduced-order observer needs to be constructed. For the NOFB dynamical equation described by equation (29), it can be seen that the state can be directly obtained from the output but the states and cannot be directly obtained from the output Therefore, the states and need to be estimated by using the NOFB-reduced-order observer. The specified eigenvalues for the NOFB-reduced-order observer gain matrix Fare –4 and –5, and let
In this example, and Following the steps for finding the optimal NOFB-reduced-order observer, the optimal NOFB-reduced-order observer can be obtained as
where
The value of Jis 0.8002 for the obtained optimal NOFB-reduced-order observer in equation (31). The nonoptimal NOFB-reduced-order observer with the same specified eigenvalues –4 and –5 can be obtained by applying the nonoptimal design method3,19–22to be
where
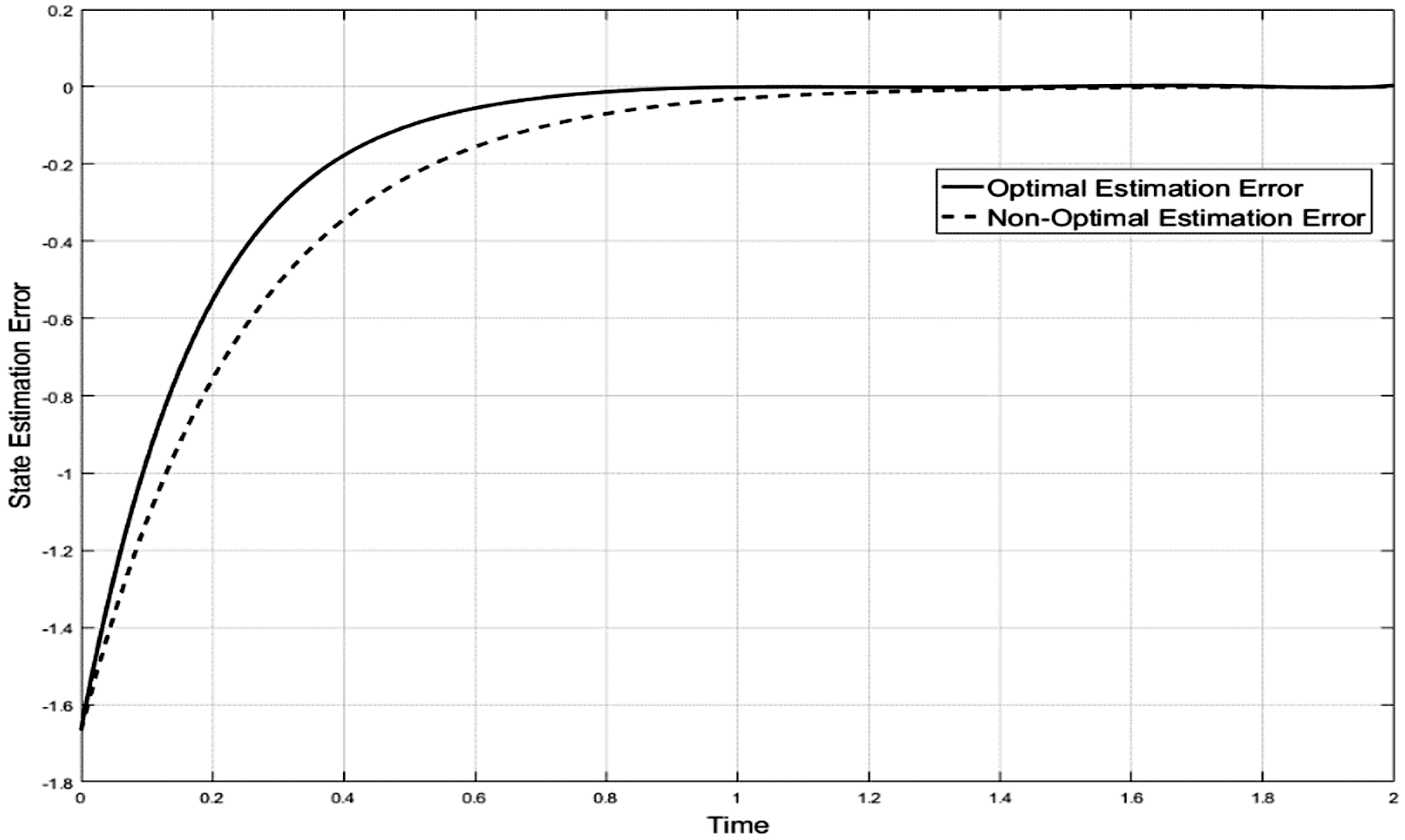
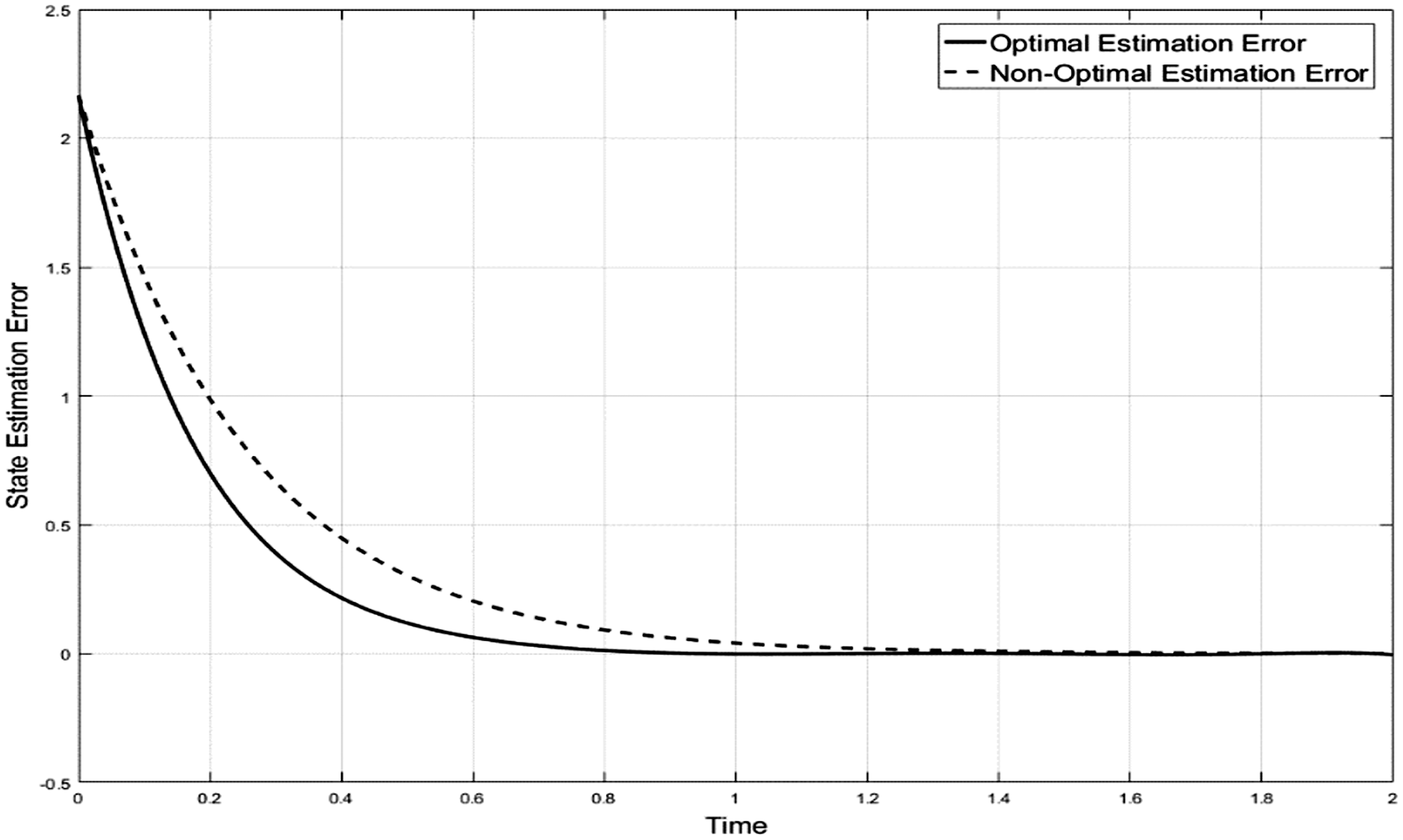
For the nonoptimal NOFB-reduced-order observer, the value of Jis 1.1212. The comparisons of the state estimation errors and for the to-be-estimated states and of optimal estimation and nonoptimal estimation are, respectively, given in Figures 3to 5with It can be seen that, in addition to the estimated state errors converging fast to zero, the performance measurement value Jbased on the proposed optimal design approach is 28.6% less than that based on the existing nonoptimal design method.3,19–22That is, the total transient estimation error obtained by the optimal observer is indeed much smaller than that of the nonoptimal observer.
A comparison of state estimation errors for the state of optimal estimation and nonoptimal estimation, respectively (Example 2).
A comparison of state estimation errors for the state of optimal estimation and nonoptimal estimation, respectively (Example 2).
A comparison of state estimation errors for the state of optimal estimation and nonoptimal estimation, respectively (Example 2).
Remark 2:In this paper, the eigenvalues of the observer gain matrix are specified to satisfy the convergence performance requirement so as to reduce steady-state errors. Additionally, the proposed reduced-order observer design method with the quadratic performance measurement of equation (9) gives a penalty for the transient error. It has been shown in this paper that there exists a physically realizable, optimally designed NOFB-reduced-order observer gain that can lead to improvement in observer transient performance. Therefore, the proposed design approach can yield an adequately damped response such that the overshoot will be small.
Conclusions
By solving a Sylvester equation and by fusing the OFA and the EO, a new approach has been proposed in this paper to design the NOFB-reduced-order observer such that (i) the eigenvalues of observer gain matrix are specified to satisfy desired convergence performance, (ii) the full-rank condition described by equation (7)is satisfied, and (iii) the quadratic performance measurement of equation (9)is minimized for reducing the large error occurring during the transient period of observation. Two examples have been given to demonstrate the effectiveness and efficiency of the proposed new optimization method on the transient performance improvement of state estimation errors. In the first illustrative example, the dynamical system in equation (23)is in an observable form in which the number of outputs is greater than the number of unmeasurable states. The methods proposed by Kung and Yeh13as well as Horng and Chou14,15cannot be used to design the OFB-reduced-order observer, while the proposed approach can be used to find the optimal NOFB-reduced-order observer. Thus, the proposed optimal design method can avoid the shortcomings of the methods proposed by Kung and Yeh13as well as Horng and Chou.14,15In the second illustrative example, the dynamical system described by equation (29)is not in an observable form. Thus, one cannot design an OFB-reduced-order observer to provide the estimated states. The proposed approach can be utilized to design an optimal reduced-order observer of a NOFB-dynamical system described by equation (29). The estimated states obtained from the designed NOFB-reduced-order observer can be directly used for the state feedback control. From the two illustrative examples, it is evident that, in addition to the estimated state errors asymptotically converging fast to zero, the performance measurement values based on the proposed optimal design approach are at least 28% lower than those based on the existing nonoptimal design method.3,19–22In addition, to the best knowledge of the authors, this paper is a pioneering work to deal with the design issue of transient estimation performance improvement for the reduced-order observers of NOFB dynamical systems. No experimental results are provided in this paper, as such; nevertheless, setting up a practical servo control system for evaluating the proposed approach is our future study. After a practical servo control system is constructed in the future, several experiments will be conducted to verify the effectiveness of the proposed approach. In Example 1 that the number of outputs is greater than the number of states to be estimated, the approach given by Chou and Chen 35can be used to design an OFB-reduced-order observer. By using the method proposed by Chou and Cheng 35to design an OFB-reduced-order observer, the value of Jis 0.0011. The value of performance measurement Jis the smaller the better. It can be seen that the value of Jobtained by using the proposed new method yields slightly worse than that obtained applying the approach developed by Chou and Cheng.35That is, the performance measurement value J based on the method developed by Chou and Cheng 35reduces 8.3% than that based on the proposed approach. But, for the dynamical system not in an observable form, the method proposed by Chou and Cheng 35cannot be utilized to design the optimal reduced-order observer of non-observable-form-based dynamical system.36
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
References
1.
EllisG.Observers in control systems.
London:
Academic Press, 2002.
2.
ZhangWQiXH.Two design methods of reduced-order observers and example. J Ordnance Eng Coll2005;
17: 62–64.
3.
ZhangBWangGSChangTQet al.
A parametric design method of reduced-order state observer in linear systems. J Acad Armored Force Eng2011;
25: 60–63.
4.
TokunagaANakamuraMTakamiHet al. An optimal observer design for 2-inertia system via ILQ design method. In: Proc. of the IEEE industry applications society annual meeting, Las Vegas, NV, USA, 2012, pp.1–8.
5.
FurlanIBianchiMCaminitiMet al. An approach to the optimal observer design with selectable bandwidth. In:Proc. of the 13th international conference of the European society for precision engineering and nanotechnology, Berlin, Germany, 2013, pp.244–247.
6.
ZhouYZChengM.Research on instantaneous rotation speed estimator of permanent magnet synchronous motor servo drive system. Power Electron2014;
48: 81–84.
7.
TsuiCC.Observer design – a survey. Int J Autom Comput2015;
12: 50–61.
8.
MohajerpoorRAbdiHNahavandiS.A new algorithm to design minimal multi-functional observers for linear systems. Asian J Control2016;
18: 842–857.
9.
NovytskaND.Synthesis of optimal observer for dynamic object. In:Proc. of the 4th international conference on methods and systems of navigation and motion control, Kyiv, Ukraine, 2016, pp.166–169.
10.
ShenYShuZZhuEet al.
Design and research of Luenbeger speed observer in AC servo system. Micromotors2016;
49: 87–89.
11.
Radisavljevic-GajicV.Full- and reduced-order linear observer implementations in Matlab/Simulink. IEEE Control Syst Mag2015;
35: 91–101.
12.
BernatJKolotaJSuperczynskaPet al.
Multi-layer observer as new structure for state estimation in linear systems. Arch Electr Eng2017;
66: 507–521.
13.
KungFCYehYM.Optimal observer design with specified eigenvalues for time-invariant linear system. J Dyn Sys Meas Control1980;
102: 148–150.
14.
HorngIRChouJH.The design of optimal observers via shifted Chebyshev polynomials. Int J Control1985;
41: 549–556.
15.
HorngIRChouJH.Design of optimal observers with specified eigenvalues via shifted Legendre polynomials. J Optim Theory Appl1986;
51: 179–188.
16.
JohnsonCD.Optimal initial conditions for full-order observers. Int J Control1988;
48: 857–864.
17.
ParkJKShinDRChungTM.Dynamic observers for linear time-invariant systems. Automatica2002;
38: 1083–1087.
18.
ChenCT.Linear system theory and design.
New York:
CBS College Publishing, 1984.
19.
ChenCT.Linear system theory and design.
New York:
Oxford University Press, 2014.
20.
ZakSH.Systems and control.
New York:
Oxford University Press, 2003.
21.
KuilaSDasG.Construction of reduced order observer for linear time invariant system using generalized matrix inverse. J Inst Eng India Ser B2013;
94: 141–145.
22.
BiswasSSamanataRDas. AG.detailed comparative study between reduced order Cumming observer and reduced order Das & Ghoshal observer. Int J Eng Res Dev2015;
11: 43–48.
23.
BaghaAKModakSV.Active structural-acoustic control of interior noise in a vibro-acoustic cavity incorporating system identification. J Low Freq Noise Vib Active Control2017;
36: 261–276.
24.
MohanBMKarSK.Continuous time dynamical systems.
Boca Raton, FL:
CRC Press, 2013.
25.
BhrawyAHZakyMATenreiro MachadoJA.Numerical solution of the two-sided space-time fractional telegraph equation via Chebyshev Tau approximation. J Optim Theory Appl2017;
174: 321–341.
26.
Ezz-EldienSSHafezRMBhrawyAHet al.
New numerical approach for fractional variational problems using shifted Legendre orthonormal polynomials. J Optim Theory Appl2017;
174: 295–320.
27.
Ho WHTsai JTChouJH.Robust quadratic-optimal control of TS-fuzzy-model-based dynamic systems with both elemental parametric uncertainties and norm-bounded approximation error. IEEE Trans Fuzzy Syst2009;
17: 518–531.
28.
BarnettS.Matrix methods for engineers and scientists.
New York:
McGraw-Hill, 1979.
29.
HsiehCHChouJH.Design of optimal PID controllers for PWM feedback systems with bilinear plants. IEEE Trans Control Syst Technol2007;
15: 1075–1079.
30.
ShokouhiSKYuanYZhuHP.Optimal placement of sensors and piezoelectric friction dampers in the pipeline networks based on nonlinear dynamic analysis. J Low Freq Noise Vib Active Control2017;
36: 56–82.
31.
XiaZWMaoKJWeiSBet al.
Application of genetic algorithm-support vector regression model to predict damping of cantilever beam with particle damper. J Low Freq Noise Vib Active Control2017;
36: 138–147.
32.
XinFLQianLJDuHPet al.
Multi-objective robust optimization design for powertrain mount system of electric vehicles. J Low Freq Noise Vib Active Control2017;
36: 243–260.
33.
RitaMFairbairnERibeiroFet al.
Optimization of mass concrete construction using a twofold parallel genetic algorithm. Appl Sci2018;
8: 399–318.
34.
HoWHTsaiJTChouJHet al.
Intelligent hybrid Taguchi-genetic algorithm for multi-criteria optimization of shaft alignment in marine vessels. IEEE Access2016;
4: 2304–2313.
35.
Chou FI and Cheng MY. Design of optimal linear reduced-order observers for suppressing transient estimation error. IETE J Research; 2019; (accepted for publication).