
Abstract
In this paper, a modified two degrees of freedom Smith control structure is proposed to realize tradeoff tuning strategy between the dynamic performance and system robustness based on analytical optimization of internal model control proportion integration differentiation design method. By analyzing the stability performance of the modified Smith control structure, the control characteristic between the modified Smith control structure and two adjustment parameters is obtained. The different input responses are discussed based on the performance of modified control system. Moreover, the set point response and the disturbance response of the closed-loop system are adjusted by two parameters, respectively. The multiplicative uncertainty plant is imposed into the modified Smith control system to analyze the system robustness from the aspect of the structure uncertainty. The proposed control strategy is applied to the second order plus delay time plant. The simulation result reflects that the modified Smith control structure is the method which is based on the tradeoff between the performance and the robustness tuning strategy.
Keywords
Introduction
Model error of the controlled plant and long delay time are widely existing problems in the chemical process, and it is important to handle such issues in the chemical process. A closer control method of the loops with dead time was proposed by Smith 1 to solve the long delay time in the chemical process, which is called Smith predictive control. A general structure for Smith control system is shown in Figure 1.
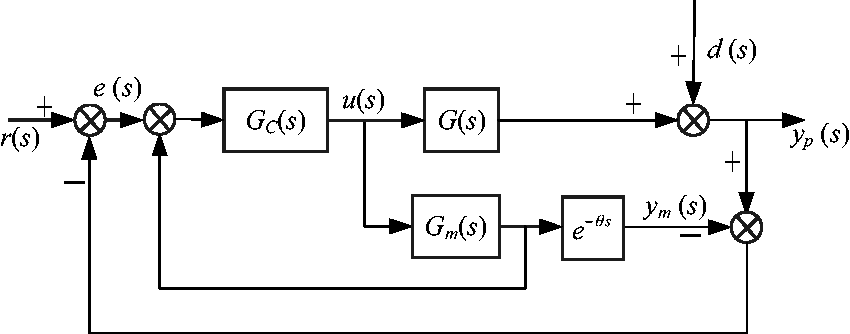
A general structure for Smith control system.
Recently, lots of researchers put more focus on the Smith predictive control to boost the rapid development of the chemical process control technology. Huang et al. 2 made an extension of the modified Smith fuzzy PID controller into an oil-replenishing device of the deep-sea hydraulic system to control the temperature. Araújo et al. 3 combined the filtered Smith predictors with the receptance of a vibrating system to the design the feedback control for SOPDT plant. However, their approach is short for guaranteeing the stability. Bonala et al. 4 improved the robustness performance of the networked control systems by a digital Smith predictor with the delay compensator. Lyapunov stability condition is used to prove the stability of the networked control systems. To control unstable and integrating processes with large time delay, Raja and Ali 5 utilized a modified parallel cascade Smith predictor with a secondary disturbance rejection controller into improvement in closed-loop performance. Smith predictive control is also applied to other many areas, for instance, industrial network control,6,7 multiagent formation control, 8 directional drilling, 9 robot, 10 etc.
Internal model control (IMC) 11 technology is an important control theory originated for the improvement of Smith predictive control, especially for the large dead time process. Hilsch et al. 12 extended IMC structure into nonlinear input saturation systems with the aim to cope with input magnitude constraints. Yadav and Gaur 13 proposed a method which combined the fuzzy supervisor and the modified IMC as an adaptive tuning to control the speed of nonlinear uncertain heavy duty vehicle (HDV) through angular position of throttle valve. Kim et al. 14 presented a design procedure, which combined nonlinear IMC with linear matrix inequality feasibility to control the stable Wiener system. Bouzid et al. 15 proposed a novel nonlinear IMC method for the unmanned aerial vehicle to raise the performance and the robustness level. At current, the innovative application of IMC theory is ongoing.16–18
The 2DOF control structure is also paid close attention by lots of researchers. Singh et al. 19 presented a controller design method of the 2DOF-IMC-PID, which combined with model order reduction technique to control directly full order system model. However, they just only made a comparative study of conventional PID and IMC-PID. The described approach is short of analyzing robustness. Zhang et al. 20 proposed a 2DOF method of Smith predictor for the first order plus delay time (FOPDT) processes. Smith control system with compensator structure restricts attention to an FOPDT system for the sake of clarity of exposition. There are some deficiencies in this control strategy. For example, the system stability depends on the model of the controlled plant; the equivalent control structure is open control; although the control structure is a 2DOF, they do not consider the analytical optimization based on performance/robustness tradeoff tuning strategy when tuned to the controller parameter.
In this work, it is aimed to enhance the robustness performance of Smith control system for SOPDT process based on the performance/robustness tradeoff tuning. A modified TDF Smith control structure is proposed to overcome the above deficiencies based on analytical optimization of IMC-PID design method with considering the tradeoff tuning strategy between the dynamic performance and system robustness.
Stability performance of modified Smith structure
In the chemical process, the FOPDT model and the SOPDT widely existed. Meanwhile, the higher order plant can be induced into FOPDT in the process of analyzing the system and designing the controller. Then, the induced order error is seen as the internal error in the design process. In the induced order process, the middle–low frequency character of FOPDT coincides with that of the higher order plant. Therefore, SOPDT plant has been chosen to be applied in the modified 2DOF control method. In the chemical process, the structure of the controlled plant is stable and the parameters of the controlled plant are generally uncertain. Thus, the structure of SOPDT plant with the uncertainty parameters is adopted as the research plant. It is significant for the proposed control strategy to extend into the higher order plant. Modified structure for Smith control system with feedback structure is shown in Figure 2. In Figure 2, the controlled plant

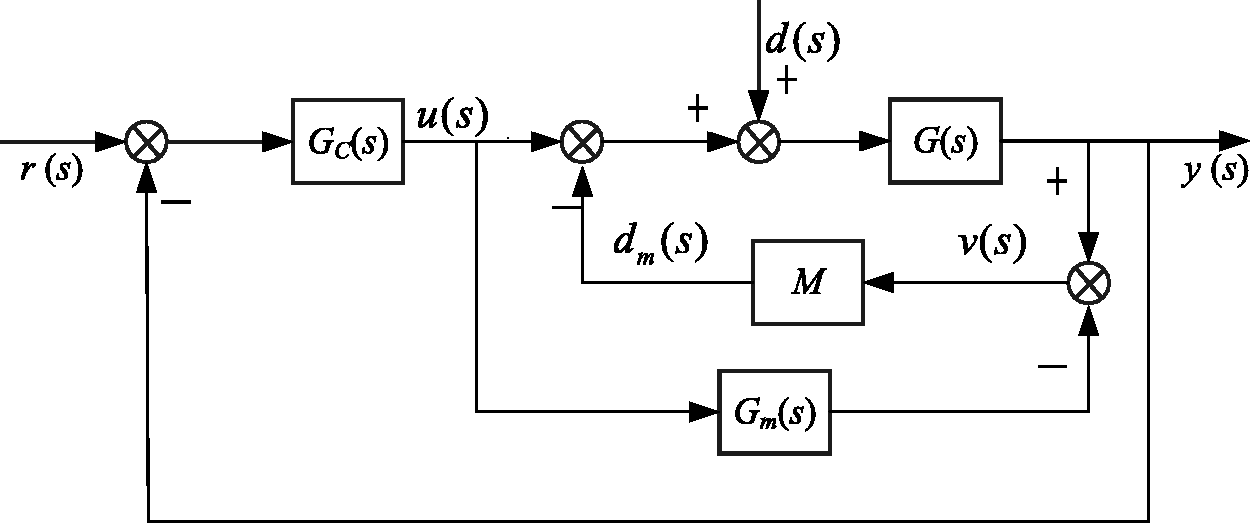
Modified structure for Smith control system with feedback structure.
According to the IMC control theory,
11
the corresponding IMC controller is given by the following equations.



Therefore, the input error of the modified Smith control strategy is obtained by the following equation.

According to the robust control theory,
21
the sensitivity function, which reflects the robustness of control system, can be obtained by the following equation.

Substituting equation (6) into equation (5), the following equation can be obtained.

It is known from equation (7) that
And then, the disturbance input error of the modified Smith control strategy is obtained by the following equation.

From the above equation, it is obvious that
Modified structure for
As shown in Figure 3, the expression of


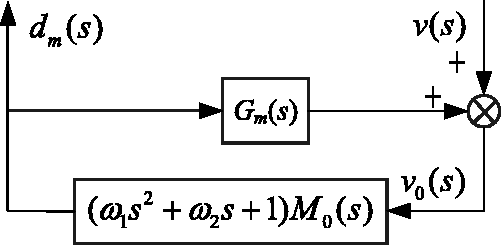
Modified structure for
Assuming that the system model matches,



Equation (13) shows that the equivalent structure

Substituting equation (15) into equation (16), the following equations can be obtained


Thus, Following the Final Value Theorem (FVT),
22

Thus, the following conditions must be satisfied by

Simplified modified Smith control structure
The disturbance response can be obtained as follows

Assume

According to equation (19), the modified structure of Smith predictive control can be simplified as shown in Figure 4.
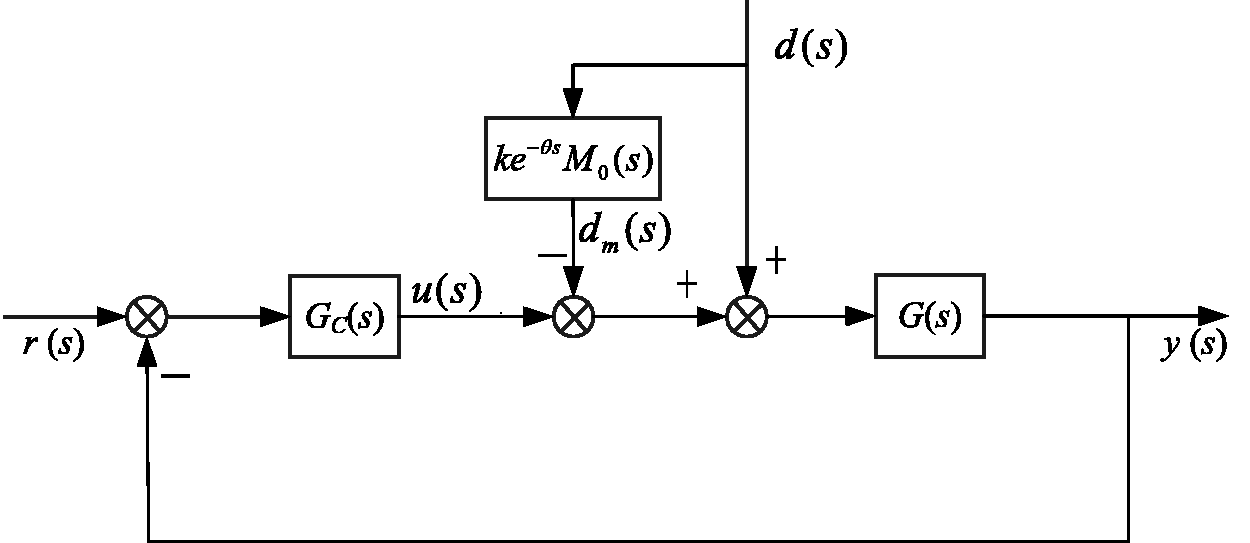
Simplified structure for modified Smith structure.
Design controller
The adjustable parameter
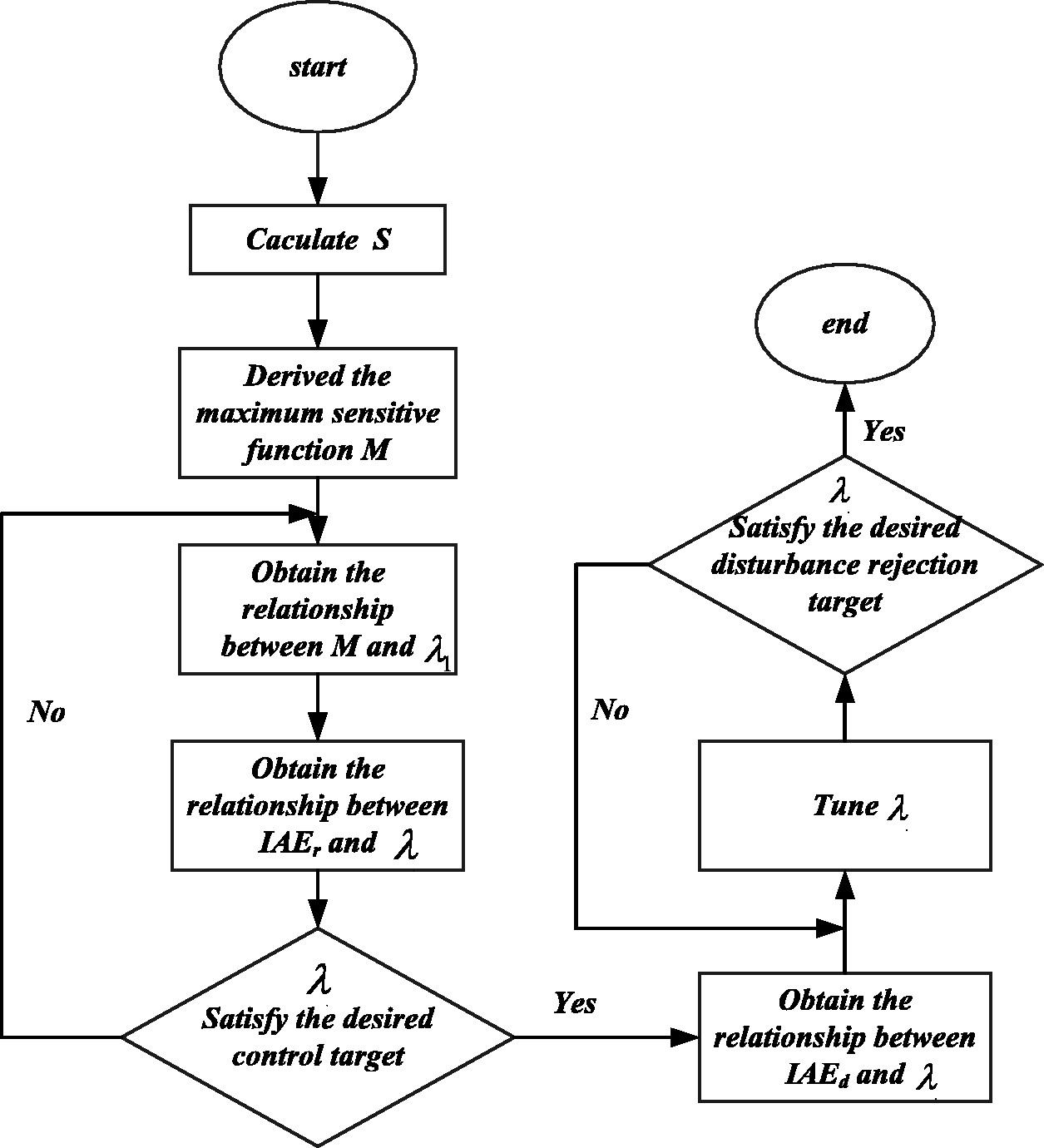
Flow chart for tuning the adjustable parameters.
Tuning the parameter
Substituting equations (1) and (3) into equation (6), the following equation is derived

For the time delay plant, it is handled by Taylor series expansion method, as shown in equation (22).

By expanding equation (21), the following equation can be obtained



In the frequency scope of

The different relationship curves between
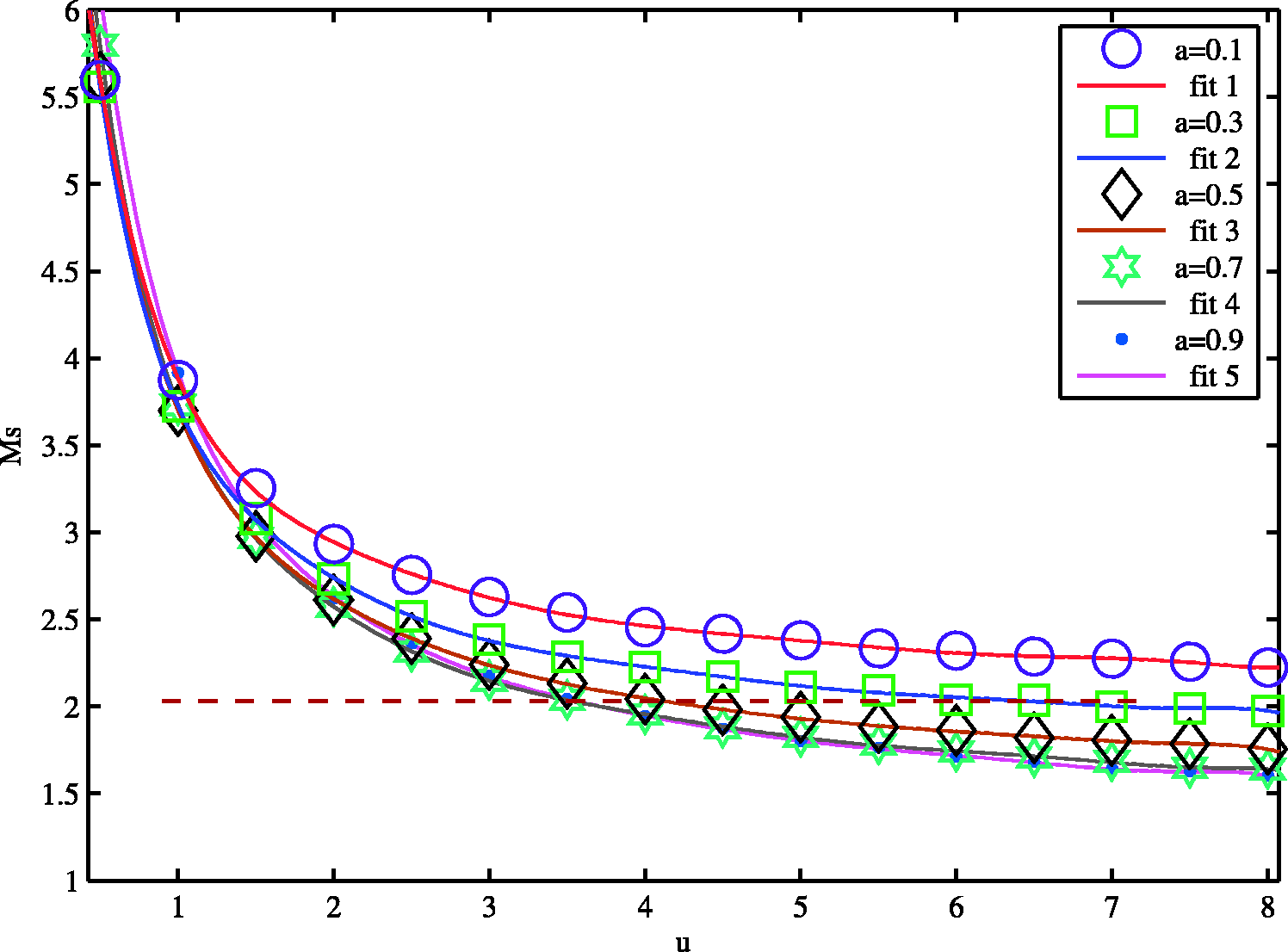
Relationship of Ms–μ.
Integral absolute error (IAE) value is an important index for the stability performance of the control system. From the aspect of computation amount, IAE has decreased complexity for the proposed method when compared to other methods. Thus, the authors choose the IAE as the research index. However, the tuning of the objective function is not limited on IAE. This will be investigated in future researches. According to the definition of IAE, the step response is imposed on the input, and the following equation can be obtained

Calculating the equation and resulting in the following equation

When
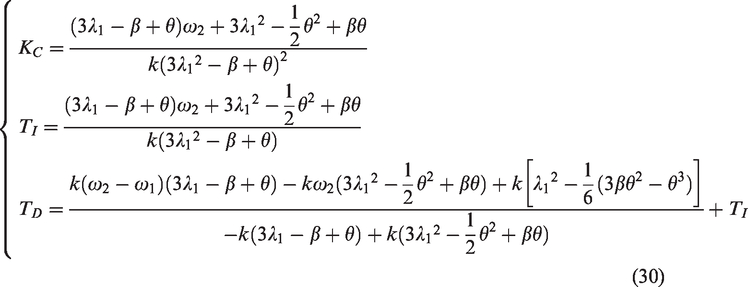
The typical PID controller is shown in equation (29)

Expanding equation (3) in a Maclaurin series with s, compared with the equation (29) by the coefficient, the parameters of PID controller are calculated by the following equation
Tuning the parameter
According to the definition of IAE, the step response is imposed on the disturbance terminal, and the following equation can be obtained

Assume that

According to equation (32), if
Substituting equation (18) into equation (32), this following equation can be obtained

Calculating the equation and changing the scale, we get the following

Robustness analysis
To analyze the system robustness, the multiplicative uncertainty plant
22
is imposed into the control system, as shown in Figure 7. The following equation is obtained from Figure 7

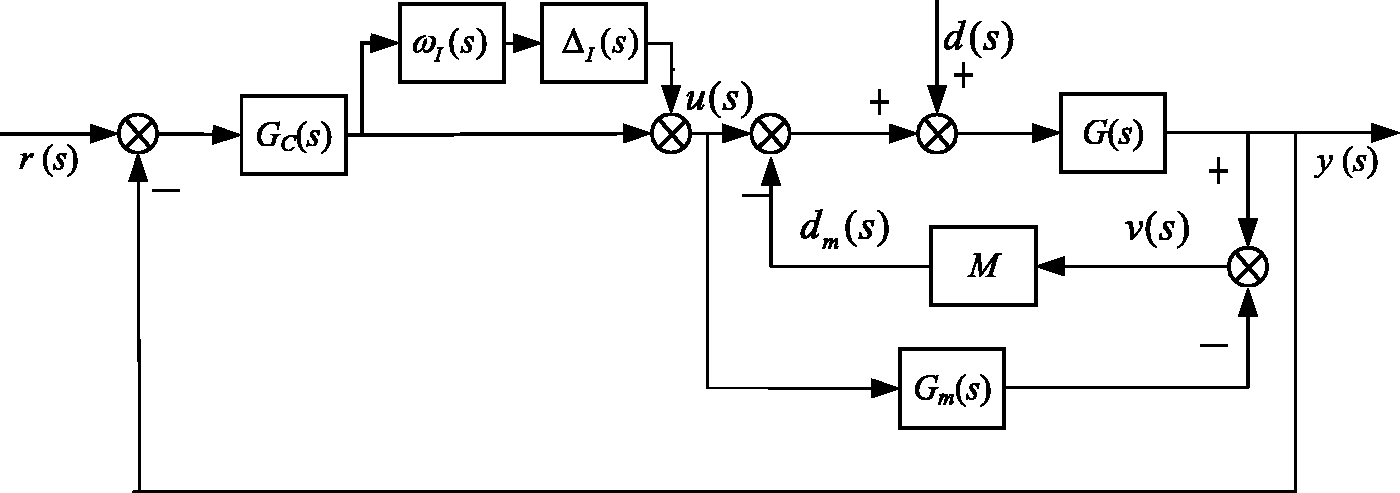
Robust structure of modified Smith control system with the multiplicative uncertainty.
Let

Then the complementary sensitivity function is given by the following equation

Expanding equation (35), the following equation can be obtained

According to the Nyquist stability criterion,
23
the robust stability condition of the modified Smith control system is that if the system is stable, the Nyquist curve of

Furthermore, the robust stability condition of the modified Smith control system is shown in equation (40).

Illustration
In this paper, SOPDT plant is chosen as the control plant to verify the effectiveness of the proposed method. The transform function of the controlled plant is given by the following equation
According to the section of design controller, the internal model controller and the equivalent the feedback controller can be obtained by the following equation

The disturbance estimator is given by the following equation
The proposed method is used to tuning the parameters
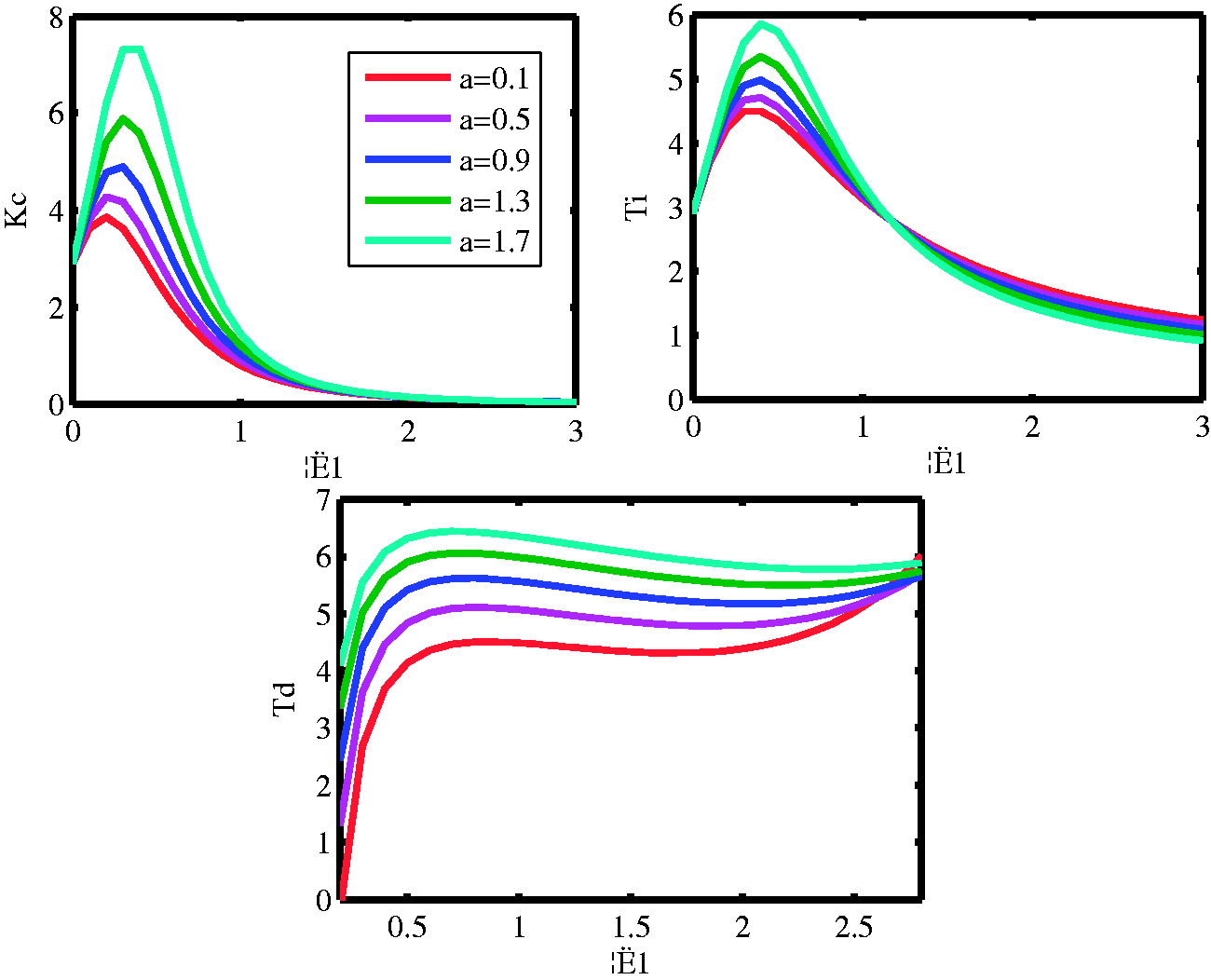
Relationships among the PID coefficients and
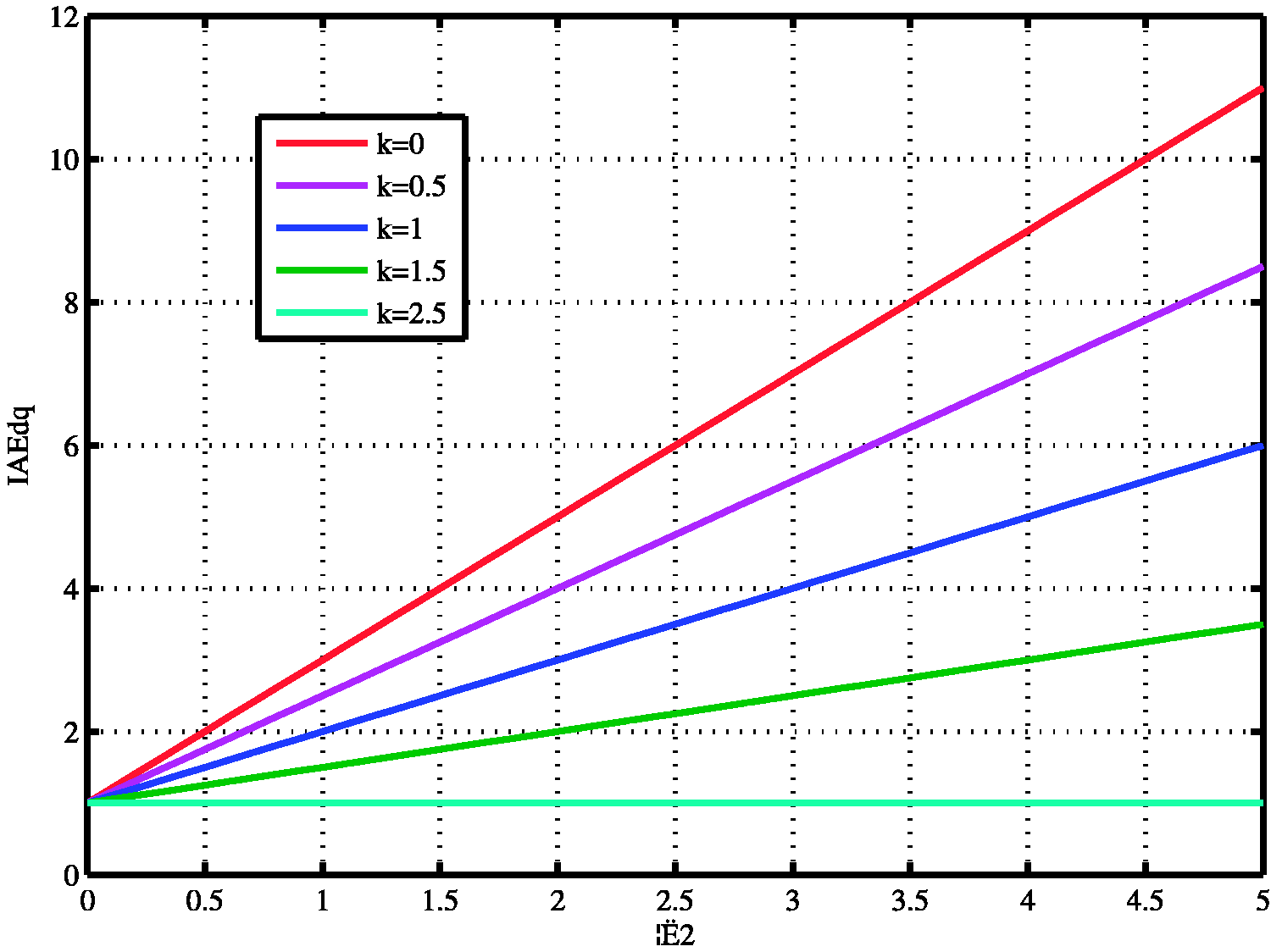
Relationships between
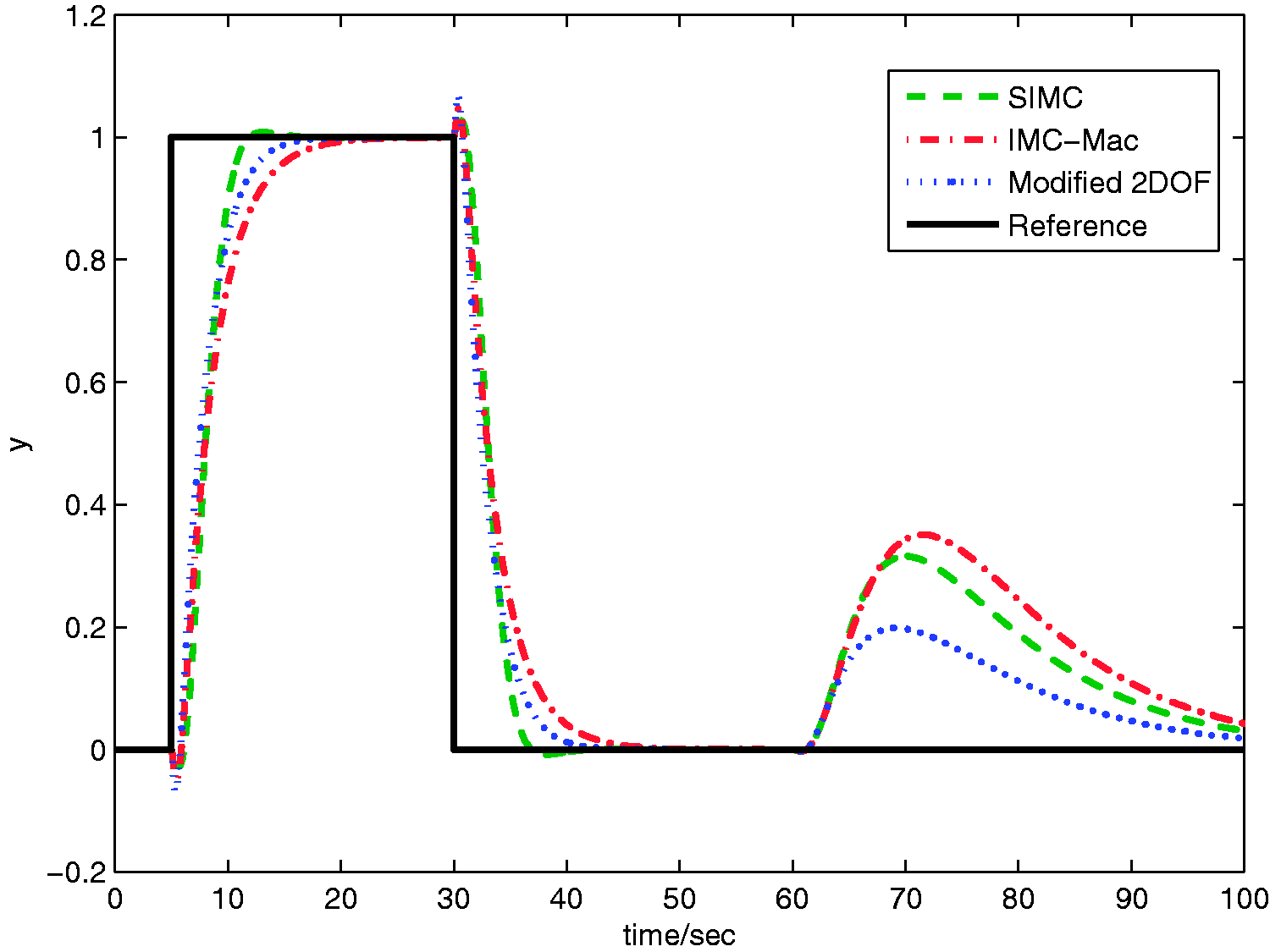
To evaluate the performance of the modified Smith control system in the time domain, a unit step response is imposed on the input terminal at 5 s, and a step load disturbance is imposed on the output terminal at 60 s. The proposed method is compared with Simpled Internal Model Controller (SIMC)24 and IMC-Mac. 25 The output of the set point response and the control law of the set point response for the modified Smith control structure are shown in Figures 10 and 11, respectively. Figures 10 and 11 prove the validity that the modified Smith control structure is based on the tradeoff between the performance and the robustness tuning strategy. The performance of the set point response for the example is shown in Table 1.
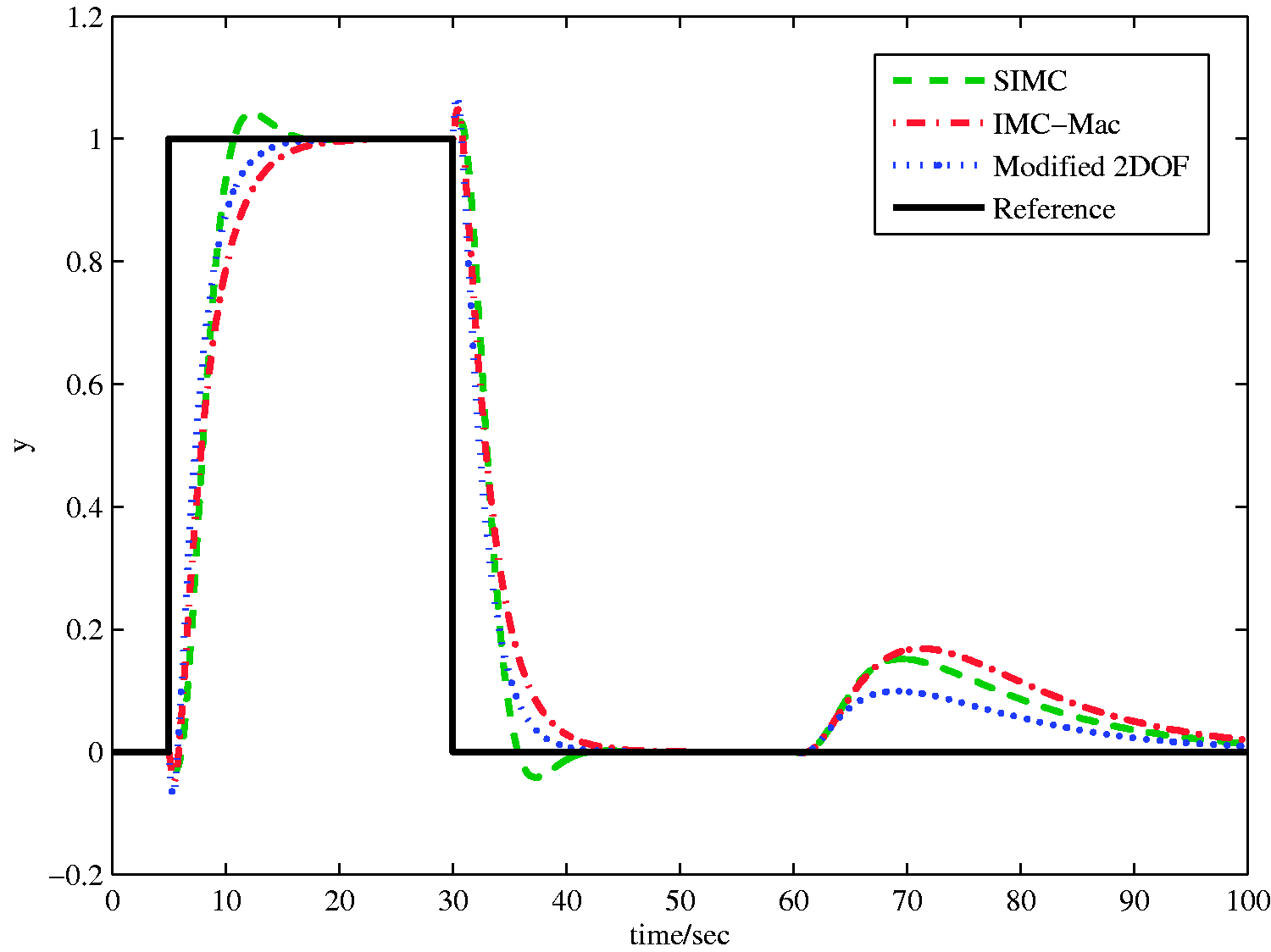
Output of set point response for modified Smith control structure.
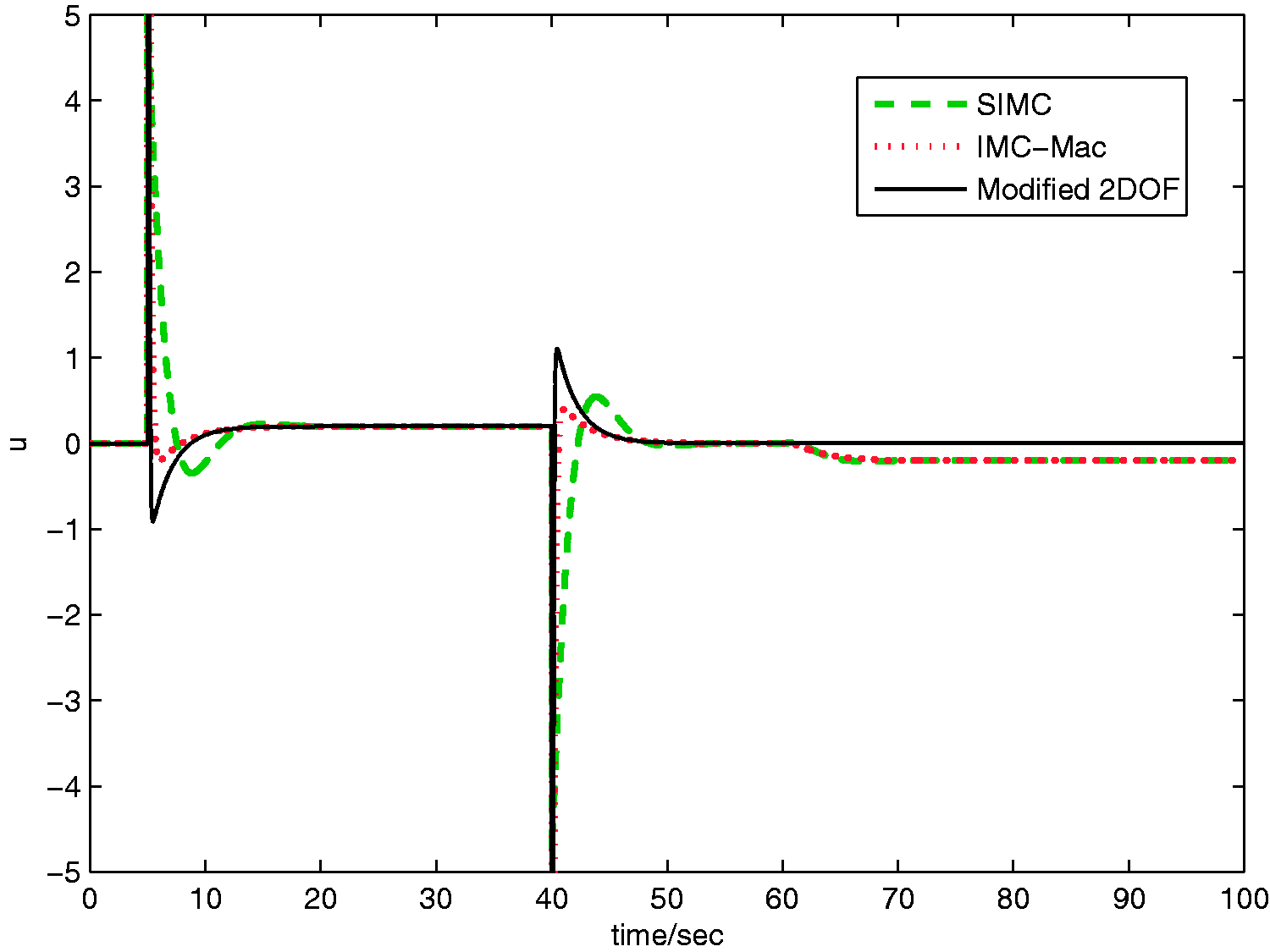
Control law of set point response for modified Smith control structure.
The performance of the set point response for the examples.

IAE: integral absolute error value; IMC: internal model control; SOPDT: second order plus delay time.
To estimate the performance of the modified Smith control system in the frequency domain, the frequency responses from the input terminal to the output terminal, including impulse response, Nyquist diagram, Bode diagram and Nichols Chart, are shown in Figure 12, and then Figure 13 shows the frequency responses from the input terminal to the output terminal. It is obvious from Figures 12 and 13 that the modified Smith structure has good dynamic performance in the frequency domain. Especially, Nyquist curves of the modified Smith structure do not encircle the point (–1,
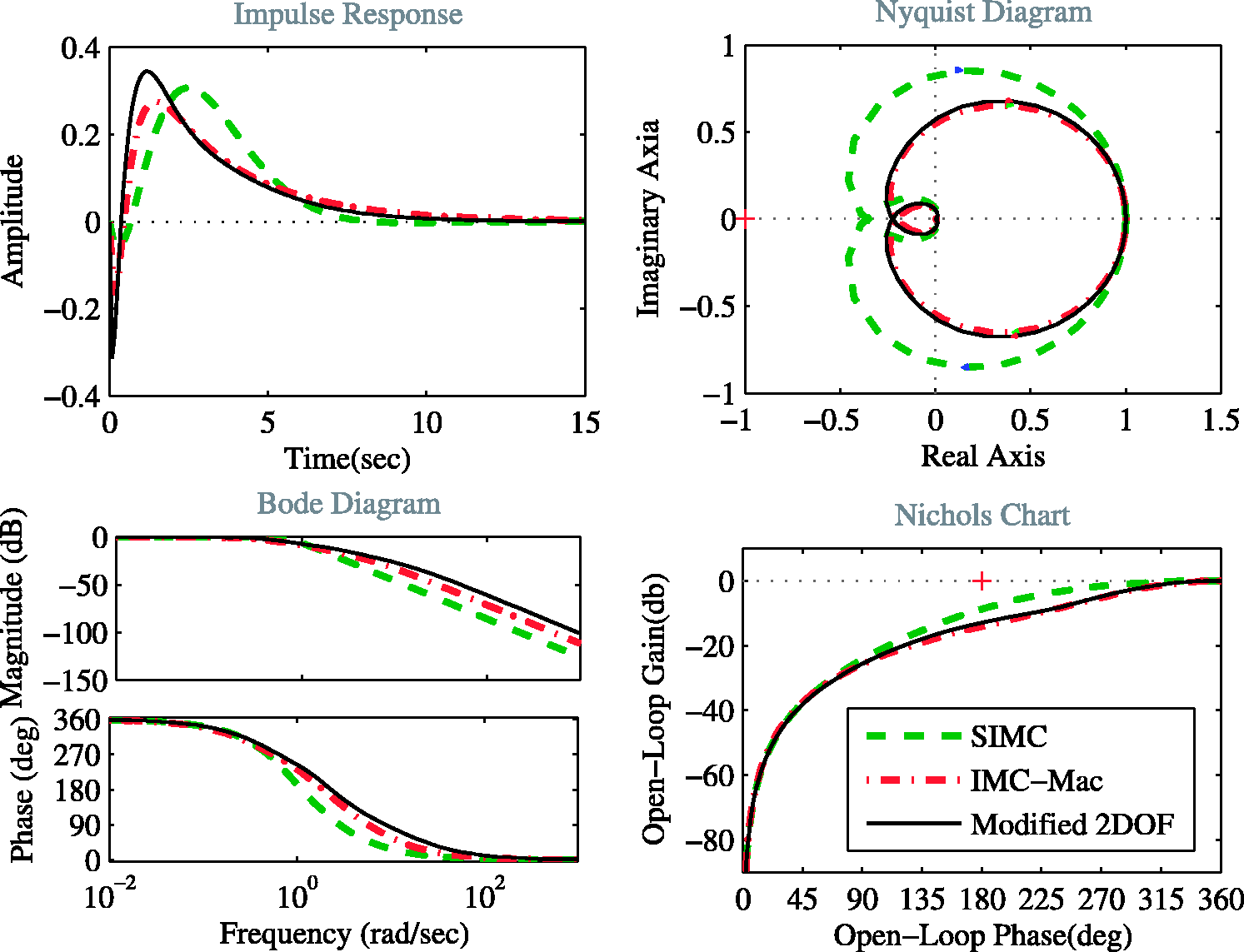
Frequency response of input terminal for modified Smith control structure.
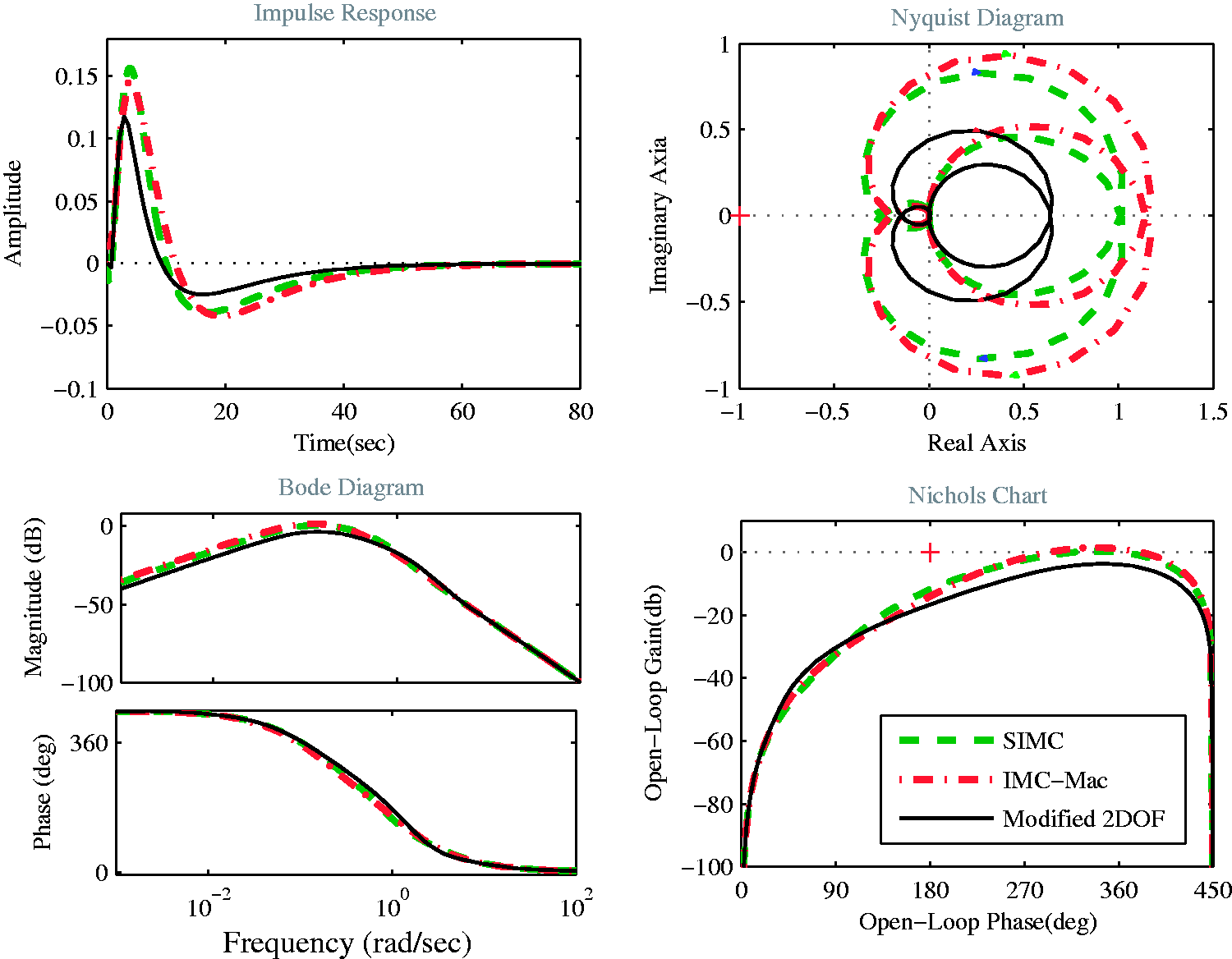
Frequency response of disturbance input terminal for modified Smith control structure.
To evaluate the disturbance rejection performance of the modified Smith control system in the different types of the disturbance, the step disturbance and the white noise are imposed on the disturbance input terminal. At the disturbance input terminal, the gain of the step disturbance increases two times and the delay time of the step disturbance increases 20%, as shown in Figure 14. Figure 15 shows the capability of the anti-disturbance for the modified Smith control system when the white noise disturbance is imposed on the disturbance input terminal.
Step disturbances for modified Smith control structure.
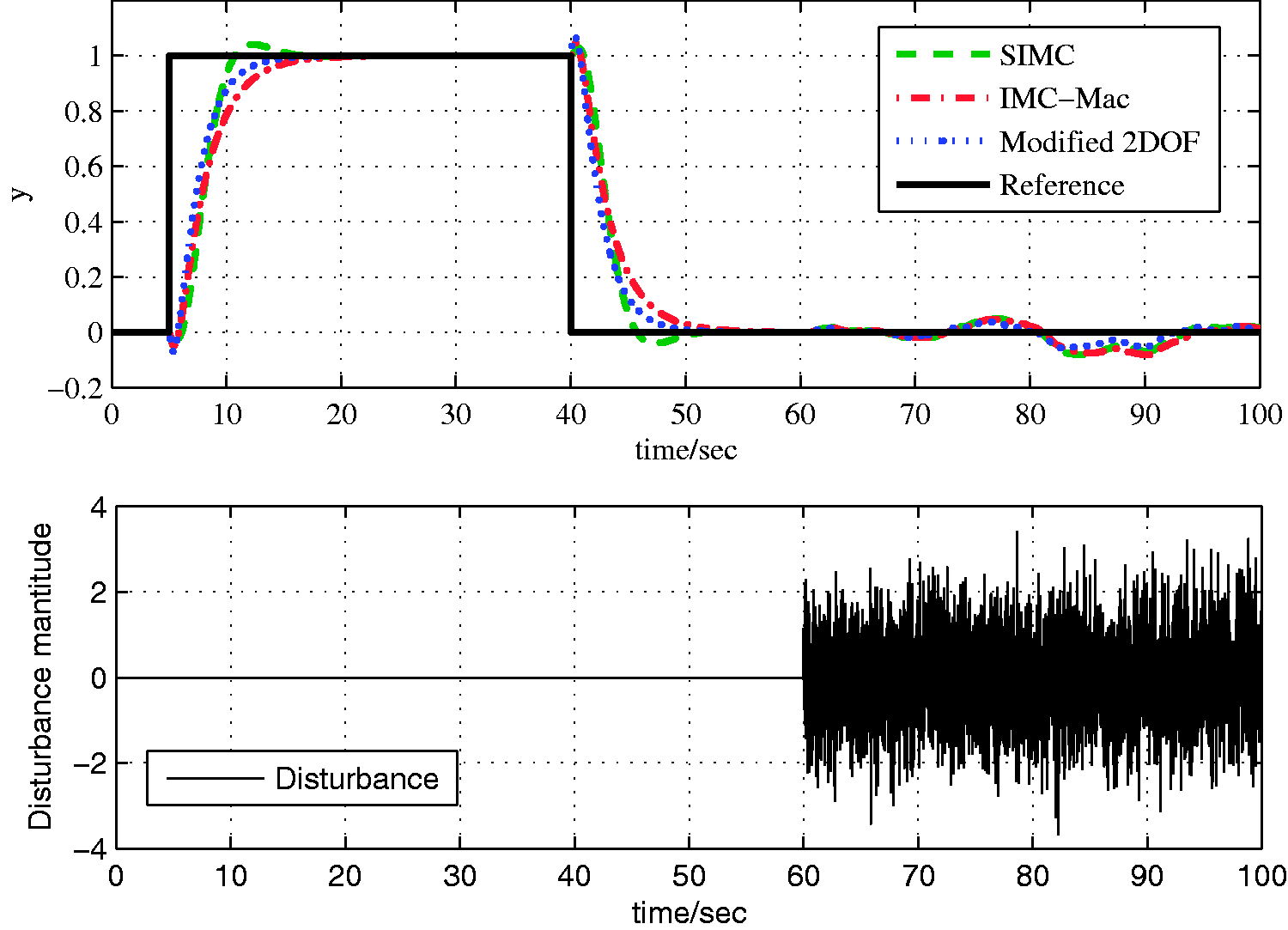
White noise disturbances for modified Smith control structure.
It is known from Figures 10 to 15 that the proposed Smith control structure has the strong capability of the dynamic characteristic and the disturbance rejection. Compared with other two methods, control effectiveness of the proposed method is similar to IMC-MAC and better than SIMCs. Moreover, the capability of the anti-disturbance of the modified Smith control structure is obviously better than the other two methods. However, the proposed method is not perfect. For example, the part of the performance index of the modified Smith control structure is not optimal, including raise time, overshoot, etc. The simulation result also reflects that the proposed Smith control structure is the method which is based on the tuning tradeoff between the performance and the robustness tuning strategy.
Conclusion
A modified 2DOF Smith control structure is described. It is used to realize tradeoff tuning strategy between the dynamic performance and system robustness based on analytical optimization of IMC-PID design method. The proposed control strategy is applied to SOPDT plant. Illustration process shows that the proposed Smith control structure has the strong capability of the dynamic characteristic and the disturbance rejection. The strong efficiency of the approach we have proposed here has demonstrated that the proposed Smith control structure is the method which is based on the tradeoff between the performance and the robustness tuning strategy. However, the proposed method is not perfect. Several issues are still under research. For example, the system robustness of the proposed control strategy is just only considered on the structure multiplicative uncertainty aspect. Further research extending the presented methodology to the controller design for the nonlinear plant with large model errors is currently ongoing.
Footnotes
Acknowledgements
The authors are grateful to the anonymous reviewers for their valuable recommendations.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors would like to acknowledge the financial support of the National Natural Foundation of China (61473024) and higher school specialized research fund for the doctoral program (16YB1001).