This paper deals with the transitions through Melnikov thresholds and the corresponding fast–slow dynamics in a family of bi-parametric mechanical oscillators subjected to an amplitude modulation force both analytically and numerically. Applying Melnikov analytical method, the threshold condition for the occurrence of mixed-mode oscillations is obtained. First, the Melnikov threshold curves are drawn in different parameter space in the unperturbed system. Next, as the control variable crosses above the threshold, two states about mixed-mode oscillations can be identified: the rest state corresponding to local limit cycle from nontrivial equilibrium point and the spiking state corresponding to large amplitude cycle produced by saddle–node bifurcation of limit cycles. Such mixed-mode oscillations are created since the amplitude modulation force slowly and periodically switches between the rest states and spiking states. Furthermore, we elucidate the effect of modulation frequency on phase portraits and dynamical behaviors, and some numerical simulations are also included to illustrate the validity of our study.
Effects of different periodic forces on dynamical behaviors have been probably one of the common scientific problems.1–7 In a series of research, Hartzell et al.8 explored the nonlinear dynamics of a new CAM photosynthesis model and investigated the responses of CAM plant carbon assimilation to different combinations of environmental conditions. Yamapi et al.9 investigated the effects of noise correlation on the coherence of a forced Van der Pol-type biorhythm system. It has been shown that correlated noise, even if the attractors are not fix points but orbits, can give rise to stochastic resonance. And on the other hand, Csernak and Stepan10 examined a harmonically excited dry friction oscillator and proved that the motion is symmetric in space and time at almost all the values of excited frequency. Chavez et al.11 obtained a bifurcation analysis of two periodically forced Duffing oscillators coupled via soft impact and the fact that the multistable system can change the number of stable attractors or reduce the number of coexisting solutions via transient impacts.
In the abovementioned studies, comprehensive analytical investigation can be launched from the two important aspects: the amplitude and the frequency.12–14 For instance, when we focus on the low-frequency force, i.e. the external forcing frequency is far smaller than intrinsic frequency of the original system, the oscillator may exhibit typical fast–slow dynamics named as mixed-mode oscillations (MMOs).15–18 Such oscillatory behaviors often behave in periodic states characterized by a combination of relatively large amplitude (in spiking state) and nearly harmonic small amplitude oscillations (in rest state).19–22
On the other hand, considerable attention has been paid to the behavior of amplitude modulation force (AMF). As a result, Alexia et al.23 studied a modulated acoustic radiation force produced by two confocal tone-burst ultrasound beams of slightly different frequencies and showed that modulated shear waves can be generated by a finite-amplitude acoustic radiation force. Yang and Liu24 have discussed the vibrational resonance in a delayed multiple stable system influenced by an amplitude-modulated signal. Lai et al.25 investigated the suppression of jamming and stochastic resonance by the amplitude-modulated force in FitzHugh–Nagumo oscillator or Lorenz oscillator. It was indicated such continuous nonlinear model is more accurate in the estimation of the saturated amplitude value and frequency zone in which the tip–sample contact happens. Delnavaz et al.26 reported the experimental measurements for frequency response in a typical microcantilever system and obtained the results that the nonlinear continuous model is more accurate, particularly in the estimation of the saturated amplitude value and frequency zone.
Most of the studies have been done to the effectiveness of amplitude modulation methods at suppressing chaos in the case of the multiple-frequency excitations. However, up to now, there has been less attention to the (suppressing and enhancing) MMOs as well as the generating mechanism and evolution law. Here we describe analytical and numerical studies of a family of bi-parametric mechanical systems under the amplitude-modulated force, expressed by
where is the nonlinear damping coefficient and is the linear restoring parameter. is the un-modulated forcing amplitude, and is the degree of forcing modulation, is the forcing frequency, and is the modulation frequency.
Hysteretic cycles can emerge in the reduced form of equation (1) analyzed by the singular perturbation methods,27–30 given by
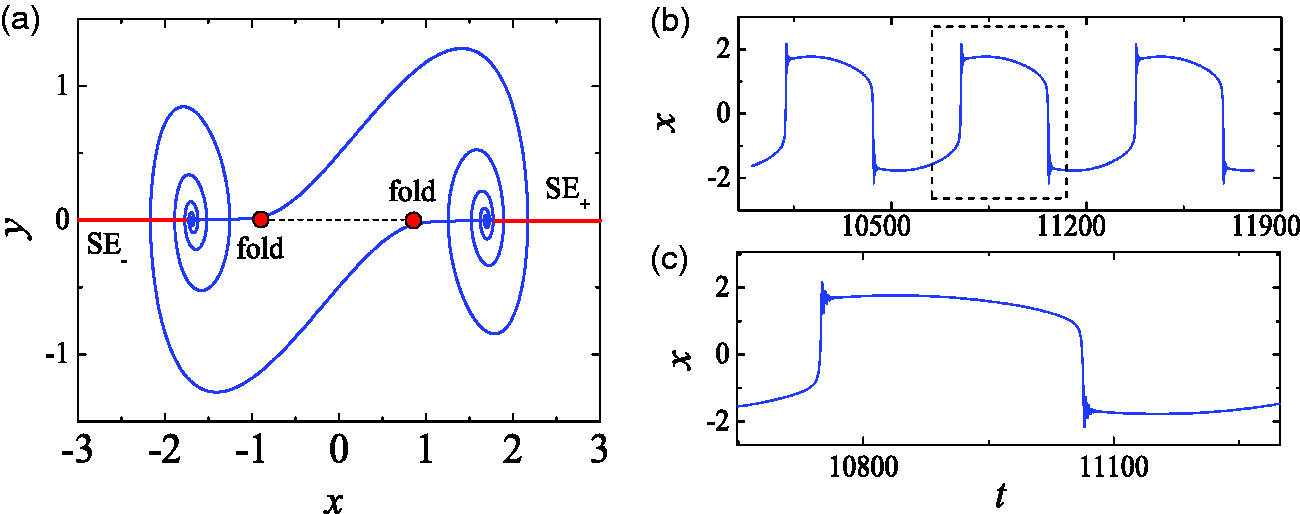
where . Equation (2) may exhibit the typical fast–slow oscillations as shown in Figure 1, where the fixed parameters are fixed at , , and (throughout the paper, we denote as ). As the trajectories pass through symmetric fold bifurcations, system undergoes the transitions between the symmetric stable equilibrium state . Hysteresis-induced MMOs are created by the kind of switches with the appearance and disappearance of the traced stable equilibrium branch alternately. It can be seen from here that the effects of these nonlinearities in amplitude modulation control have never been studied in previous work. To address this problem, we have developed a nonlinear amplitude-modulated force model and investigated the complex vibration in this paper.
Fast–slow forms of system (2) for , , , and . (a) Phase portraits of and (b, c) time series of .
The rest of this paper is organized as follows. The next section, the local bifurcation set in system (1) without perturbation is revealed from the bifurcation theory. We compute the Melnikov function and plot the threshold curve in this uncontrolled model. In “Oscillatory dynamics with equal frequencies” section, oscillatory dynamics of system are presented when the modulation frequency equals to the forcing frequency. The associated oscillation mechanisms are also revealed. In “Oscillatory dynamics with two resonant frequencies” section, we explore the oscillation dynamics in the case of the unequal relation between two frequencies. Effects of multiple frequency components are also discussed, which is related to complex transitions. Finally, “Conclusions” section contains summary of all the work.
Description and local bifurcation of the unperturbed model
We first focus on the left hand of equation (1), and consider the AMF in the right hand as the perturbation. The unperturbed form is
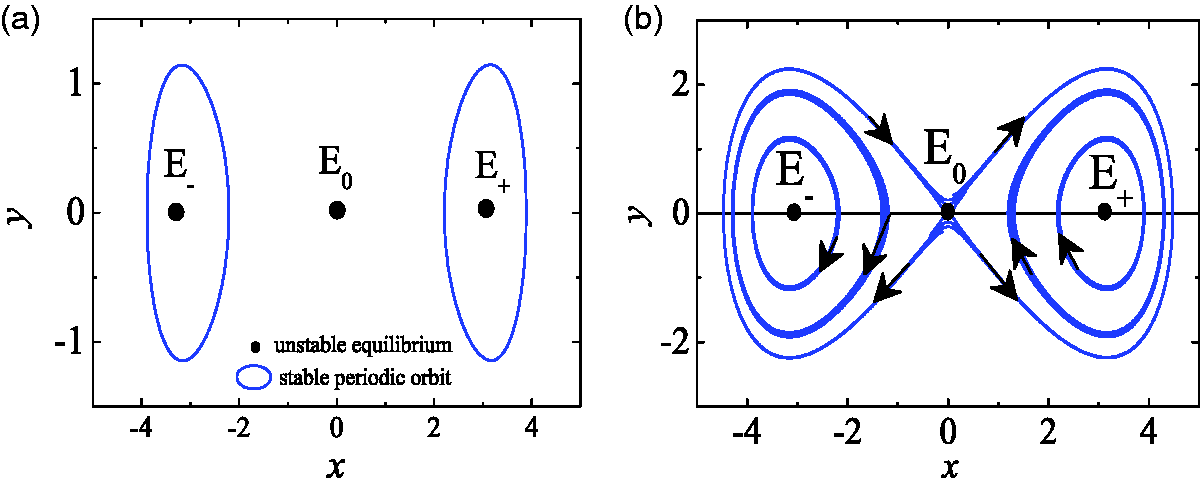
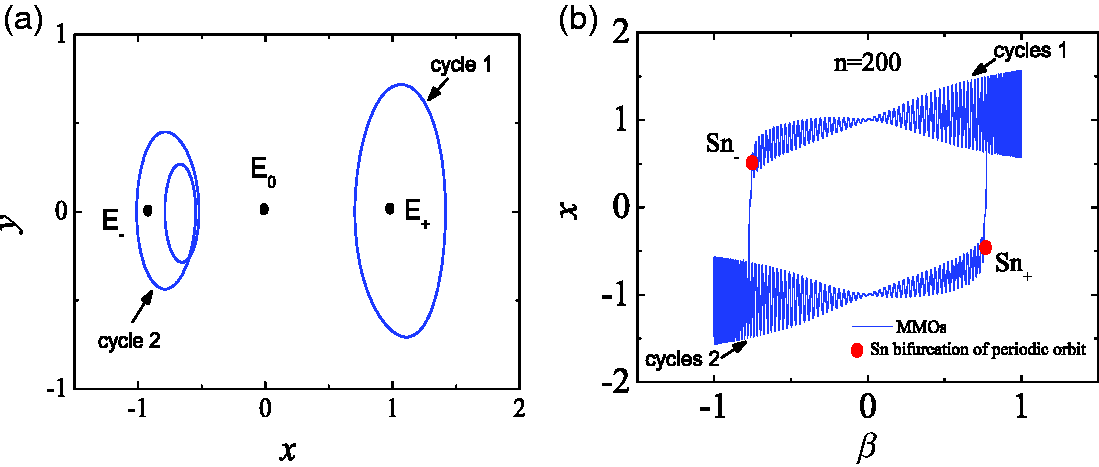
Obviously, system (3) has three equilibriums: one trivial equilibrium and two symmetric nontrivial equilibriums . From the linear stability analysis, is a saddle point and are unstable for , . A pair of stable symmetric periodic orbits emerges via supercritical Hopf bifurcation from for the first-order normal form coefficient less than zero. Configuration of equilibriums and periodic orbits are indicated in Figure 2(a). To complete the bifurcation set of system (3), we now perform the analysis by using the Melnikov method.31,32 As it is easy to check, the homoclinic (Hom) orbits are always repulsive because the trace of the linearization matrix of trivial equilibrium is positive. Using the following blow-up transformations33,34
Phase trajectories of the unperturbed model. (a) Configuration of equilibriums and periodic orbits and (b) homoclinic connections for the corresponding Hamiltonian system.
System (3) becomes
Setting and , we obtain the corresponding integrable Hamiltonian system
System (6) corresponds to the unforced motion of a unit mass particle with the potential function of (still use lowercase variable for simplicity), and the associated Hamiltonian function with the total energy is , whose phase portraits are presented in Figure 2(b). The Hom trajectories can be expressed by .
Solving for the resulting displacement and differentiating to determine velocity, the Hom connections are given as
The criteria of the existence of Hom bifurcation can be computed by Melnikov function, which is given by
After evaluation of these elementary integrals in equation (9), we obtain the Melnikov function
Based on the Melnikov function theory, the saddle connection can be preserved for . Therefore, we obtain the approximate bifurcation for homoclinic orbits: . Then, recalling and the transformation formula of equation (4), the Melnikov threshold can be derived as . Further to illustrate the existence of saddle–node (Sn) bifurcation of limit cycles, we consider a periodic orbit with the level energy of and period of . If , there is a pair of small amplitude periodic orbits; whereas for , is a large amplitude periodic orbit. The Melnikov function for cycle orbits is
It is obtained that the preserved periodic orbits can be given by . Up to different configurations of equilibriums and periodic orbits, there are two saddle–node bifurcations of periodic orbits. One corresponds to small amplitude periodic orbits and the other one involves large amplitude periodic orbits. Evaluating numerically, we obtain that both saddle–note bifurcations are very close to Melnikov threshold and almost indistinguishable.
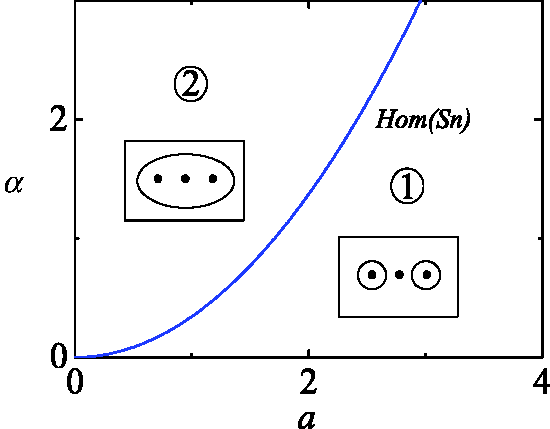
In this manner, we complete qualitative bifurcation curve of system (3) in Figure 3 at . Note that the region ① shown in Figure 3 illustrates the phase portrait structure with two small amplitude limit cycles starting from the nontrivial equilibriums. Parameters entering from region ① into region ② through the Hom (Sn) bifurcation will yield a large amplitude periodic orbit. The Melnikov threshold curve will induce the disappearance of two limit cycles and generate a stable large amplitude cycle, which apparently shows the existence of such bifurcation set with parameters in this family of mechanical oscillators. To simplify the discussion in our work, we only consider the parameter values in region ① where there are two small amplitude periodic orbits and the unstable saddle point of trivial equilibrium in the unperturbed system. Therefore, in the forthcoming part of the paper, parameter values in system (1) for numerical simulations are fixed at , .
Melnikov threshold curve of unperturbed model and the corresponding two divided areas at .
Oscillatory dynamics with equal frequencies
We begin our study from the case when the modulation frequency equals to the forcing frequency. Then system (1) becomes one of a typical class of fast–slow systems. The first step to analyze fast–slow system behaviors is the characterization of the bifurcation points and the corresponding transition modes. Next, the perturbation item containing the low frequency force will be considered as a controller from the singular perturbations point of view. In this section, we classify two representative cases separately: (1) , and varies. (2) and both vary.
Symmetric oscillation mechanism of MMOs for
For , the fast system is driven by a single cosinoidal function and expressed as the nonautonomous form by setting
The perturbed form is
Computing the Melnikov function, we have
Since is an odd function of time from to , the last integral equals to zero. Therefore, the occurrence of Hom bifurcation has no connection with the forcing, while the Melnikov function for local periodic orbits can be given as
It is easy to check that these elementary integrals in equation (15) are constants and the critical threshold value can be derived once is given. As varies, linear perturbation of traverses Sn bifurcation periodically, which leads to the transitions of phase trajectories from small periodic orbits to large amplitude cycle orbits and determines the coming up of MMOs.
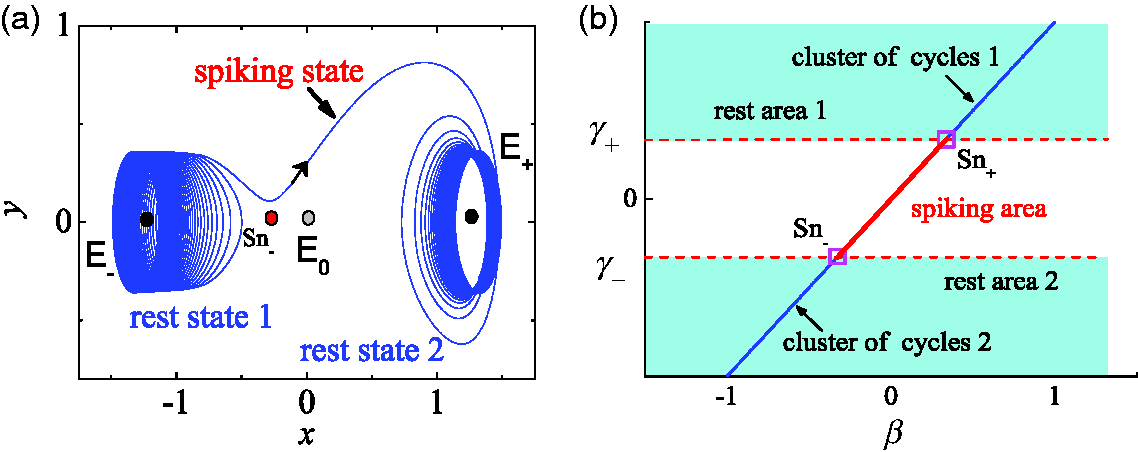
The phase portraits as well as the time series are drawn in Figure 4, where we fix the parameters in system (1) at , , , , and . One may find the transition between two parts associated with the two clusters of small amplitude limit cycles. Such forced vibration can be illustrated as a closed singular orbit which is composed of two fast and slow trajectories. According to fast–slow analysis method, the MMOs here can be classified as transitions between stable limit cycle attractors via Sn bifurcation of periodic orbits. Figure 5 may be used to illustrate typical schematic diagrams of such oscillation behaviors. As shown in Figure 5, the MMOs have been linked to the fact that the control item periodically goes through the Melnikov threshold values of .
Fast–slow forms of system (1) at , where other parameters are , , , and . (a) Phase portraits of and (b) time series of .
Schematic diagram of system (1) controlled by the linear function. (a) Transition process on phase plane and (b) illustrations of the perturbation transition process.
Bounded by the Melnikov threshold values, the vibration modes can be divided into three areas: one spiking area corresponding to a large amplitude relaxation type cycle attractor and two rest areas corresponding to local small amplitude cycles from symmetric nontrivial equilibrium points of . Since the transition can be counted for the Melnikov function values around symmetric local cycle attractors, we can classify such dynamical behaviors as symmetric Melnikov-threshold-triggered oscillation modes.
Asymmetric oscillation mechanism of MMOs for varying and
For and , we assume the cosinoidal function as , yields
The perturbed form is
Computing the Melnikov function, we have
From equation (18), the occurrence of Hom bifurcation has no connection with the forcing as what mentioned before. To consider the existence of Sn bifurcation of limit cycles, we have
Obviously, the critical threshold value can be derived from equation (19), once is given. As varies, the quadratic perturbation will traverse Sn bifurcation of limit cycles periodically, which leads to the transitions of phase trajectories from small periodic orbits to large amplitude cycle orbits and determines the coming up of MMOs. Intriguingly, since the range of and the controller only passes the half of parabola curve along the quadratic function, then asymmetric tunnels between the cycle orbits will occur.
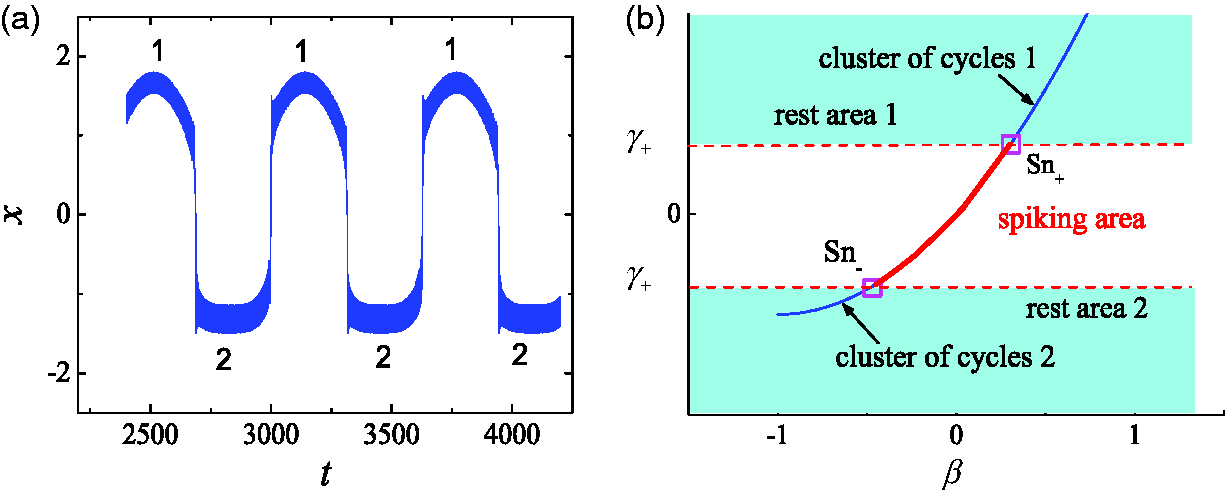
Figure 6(a) shows a group of time series of MMOs in system (1) with the fixed parameters of , , , , and . Since the transition can be counted by the Melnikov threshold value, such MMOs can be characterized by two asymmetric small amplitude periodic orbits (rest states) and a unique cluster of large amplitude periodic orbits (repetitive spiking state) during each period. Complex dynamics are created by repeated switches in the vicinity of the key points which are determined by the Melnikov threshold values of as seen in Figure 6(b).
Fast–slow forms of system (1) at , where other parameters are , , , and . (a) Time series of and (b) transition process of .
Oscillatory dynamics with two resonant frequencies
Next we explore the case of the unequal relation between the modulation frequency and the forcing frequency . Without loss of generality, the assumption is that the two frequencies are resonant and is an positive integer multiple of , i.e. , is an integer. Then we obtain the following equation
In this section, we classify the two representative cases separately: (1) and are of the same order magnitude, i.e. is a relatively small integer. (2) There is a significant order gap between and , i.e. is sufficiently large.
Dynamical mechanism of MMOs for a relatively small
Note that when is relatively small, the modulation frequency is still low frequency. It means that the two frequency components of and can be dealt with as a fast–slow form with single slow variable. The exact approach we take here is induced by the De Moivre formula,35 from which the expression for is
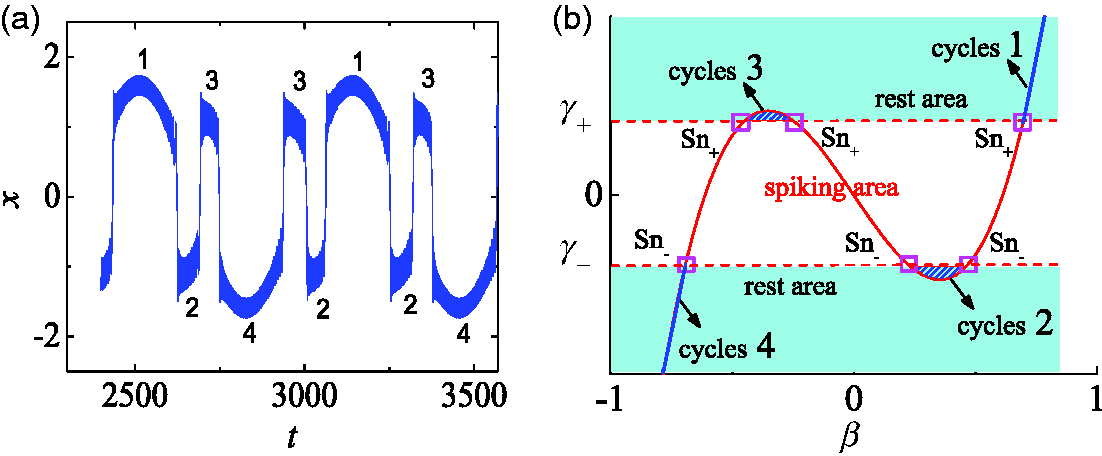
where is the maximum even number no larger than . Some quick examples are depicted as and . Other integer values of can be discussed similarly. For instance, Figure 7 shows a group of oscillatory dynamics for , where the other parameters are fixed as , , , and .
Fast–slow forms of system (1) at and , where other parameters are , , , and . (a) Time series of and (b) transition process of .
Oscillation patterns in Figure 7 can obviously be divided into different parts, i.e. the upper and lower oscillation parts which are connected by catastrophic jumps. Similar catastrophic jumps can also be observed in the preceding main section. However, the fast–slow dynamics here have obvious difference from the previous examples. That is, distinct oscillations across the rest areas and spiking areas are more times within each period (see 1–4 parts in Figure 7). Such interesting behaviors can be analyzed in the following.
For , we treat two cosinoidal functions as , , and then the fast system is
The perturbed form is
Since the occurrence of Hom bifurcation has no connection with the forcing yet, we consider the Melnikov function for periodic orbits
The Melnikov threshold can be derived from equation (24), once is given. As varies, the cubic function of will traverse Sn bifurcation of limit cycles periodically which leads to the transitions of phase trajectories. As seen in Figure 7(b), the spiking area and the rest area are bounded by the Melnikov threshold values of . The rest area corresponds to small amplitude cycle attractors around nontrivial equilibrium point while the spiking area corresponds to large amplitude cycle attractors. Such multiple switching between the rest state and the spiking state forms the complex MMOs when the modulation frequency and the forcing frequency are of the same order.
Dynamical mechanism of MMOs for sufficiently large
Generally, MMOs in usual fast–slow systems are modulated by the slow variable, and then they have the same frequency as the forcing. However, when an order gap exists between the modulation frequency and the forcing frequency, obviously there are multiple frequency components in each oscillation pattern. It is particularly important to point out that the transformation method discussed in the previous section is not valid for the De Moivre expansion that has much higher degree. The fast–slow analysis in case of this kind is discussed as follows.
Still assuming the forcing as , the fast subsystem can be described as
The perturbed form is
Then the Melnikov function for system becomes
where is the cross section time of the Poincaré map and interpreted as the initial time of the force. Furthermore, the Melnikov function for periodic orbit is now
Once and the modulation force are given, the Melnikov threshold can be derived from equation (28). Therefore, is the function depending on the modulation frequency of . In this manner, as varies, system will traverse Sn bifurcation of limit cycles periodically which leads to the coming up of complex oscillation patterns.
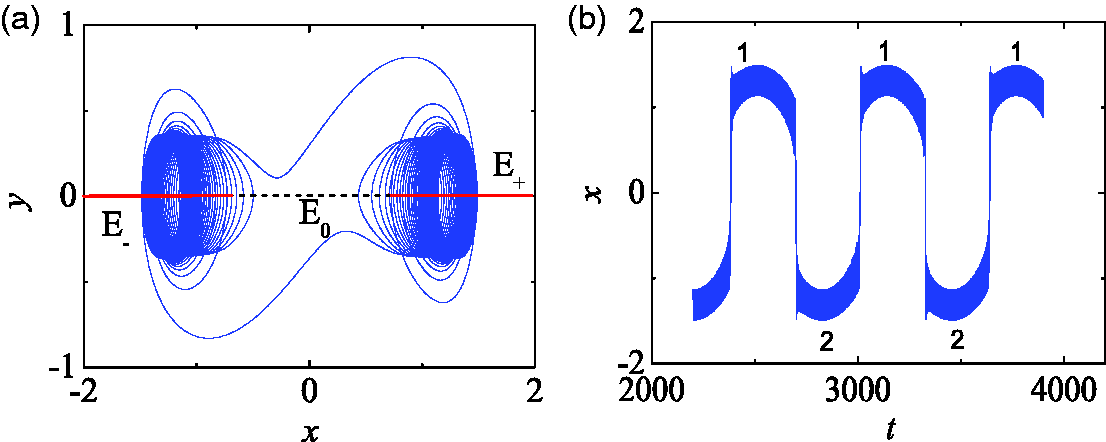
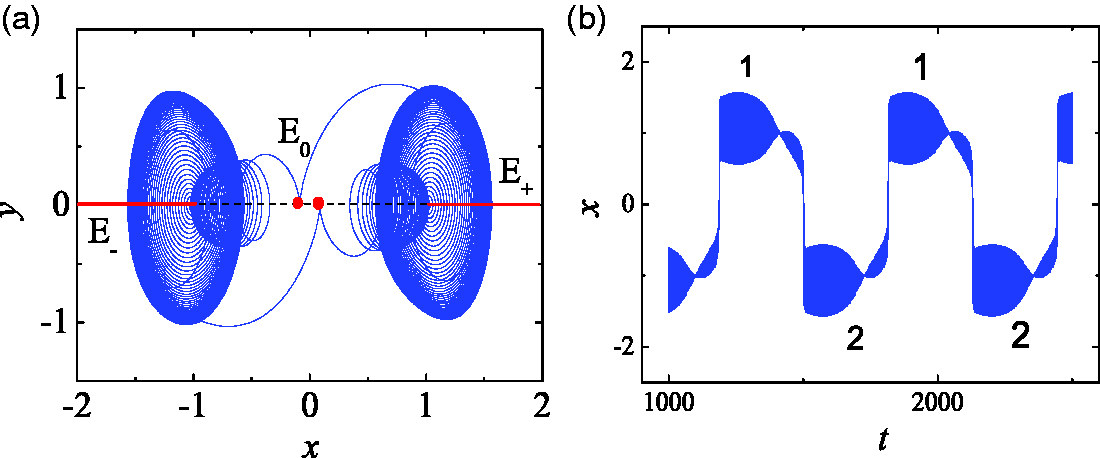
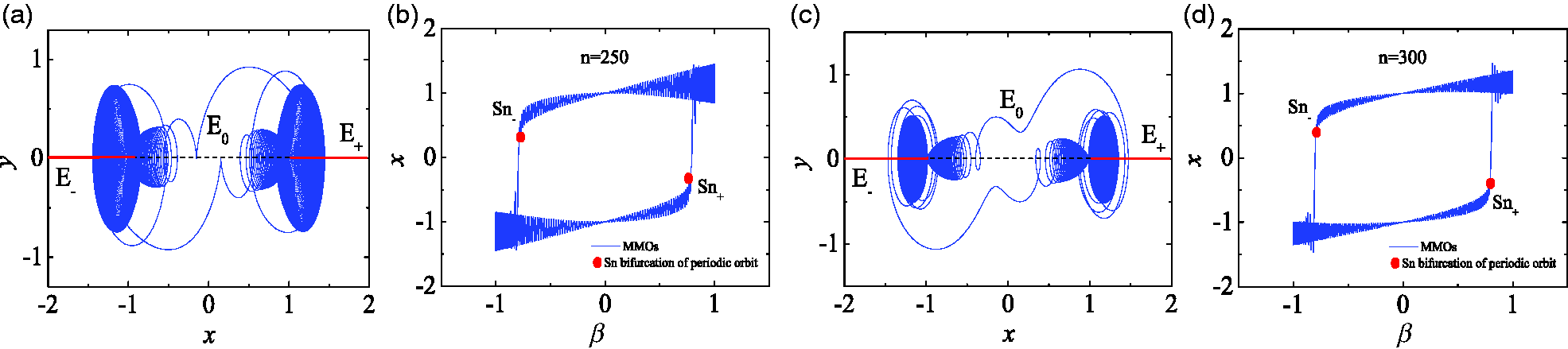
In order to investigate the dynamical behaviors as there is an order gap between and , we fix the parameters of system (1) at , , , , , and , where . The phase portraits as well as the time series are presented in Figure 8. One may still find the transition between two parts associated with the two clusters of local limit cycles, which can be classified by transitions via Sn bifurcation of periodic orbits.
Fast–slow forms of system (1) at , , , , , and . (a) Phase portraits and (b) time series of .
We may use Figure 9 as typical schematic diagrams to illustrate the hysteresis behavior in MMOs when there is an order gap between the modulation frequency and the forcing frequency. Figure 9(a) represents the phase portraits of the forced oscillator in the case of the two coexisting limit cycles at . As shown in Figure 9(b), such MMOs have been linked to the fact that the slow variable of periodically goes through the Melnikov threshold value. Periodic switching between the stable upper and lower stable branches may occur, which results in the hysteresis phenomenon bounded by the Sn bifurcation of limit cycle.
Schematic diagrams of the nonautonomous system. (a) Bi-stability of two cycle attractors in system (1), where two stable cycles are separated by the saddle at and (b) illustrations on slow manifold.
Such dynamical behaviors can be explained by the following details: when the low-frequency forcing item of passes through the Sn bifurcation of limit cycle, the trajectories of system switch to the large amplitude cycle manifold. After reaching the extremum of cosine function, the trajectories start to return remaining to move around the stable periodic orbits from the nontrivial equilibrium point. Then varies in the opposite direction and goes through the Sn bifurcation point again, while the system diverges form the rest state of periodic orbit. That is, the large amplitude relaxation type cycle occurs again.
Because the modulation frequency is the variable quantity about Melnikov function values, the varying of multiple may lead to qualitative changes of the MMOs. Since modulation frequency may play an important role in the transitions, we discuss further on the effect when the multiple varies. As an example, we consider the transition of the MMOs in Figure 10 with the variation of multiple , while other parameters remain unchanged. Numerical simulations show that with the increase of , an oscillatory mode with clear two jumps in each period may be created.
Hysteresis phenomenon (MMOs) in system (1) with the increasing multiple . (a) Phase portraits of at , (b) illustrations on plane of corresponding to (a), (c) phase portraits of at and (d) illustrations on plane of corresponding to (c).
Furthermore, the local limit cycle corresponding to the rest state is under the influence of modulation frequency and the amplitude of longitudinal in MMOs is decreased as shown in Figure 10. The numerical examples show roughly that the modulation frequency can be used as a control parameter to change the occurrence of MMOs of this type with the AMF. Consistently with the intuition, fixing other parameters in such Melnikov-threshold-triggered dynamics, there is a domain of the values of away from zero such that the oscillation modes are stable (see in Figure 10), when is in this domain, and it is unstable when is above this domain.
Conclusions
In the present paper, we focus on the MMOs in a family of mechanical oscillators subjected to an amplitude-modulated force. Threshold curves can be drawn on different parameter space. Near the Melnikov threshold curve, onset of complex oscillatory patterns can be observed. Such oscillations consist of small amplitude oscillations that alternate with large amplitude oscillations during each periodic cycle. The trajectories undergo the transition between the spiking states and the rest states.
As an important feature, we remark two different cases about the modulation frequency. When the two frequencies are with weak resonant relation, the De Moivre expansion method is used to illustrate the catastrophic jumps observed in each period of the oscillatory modes. When there is an order gap between the modulation frequency and the forcing frequency, the trajectories are associated with the two clusters of local limit cycles classified by transitions via Sn bifurcation of periodic orbits. The amplitude modulation could be used as a tuning parameter to control or anticontrol the MMOs. It should be important to study the nonlinear fast–slow dynamics in the presence of AMF and compare it with dynamics induced by the single sinusoidal or cosine force.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work is supported by the National Natural Science Foundation of China (Grant Nos. 11772161 and 11872189).
References
1.
GuckenheimerJHolmesP.Nonlinear oscillations, dynamical systems and bifurcation of vector field.
New York:
Springer, 1983.
2.
GuckenheimerJ.Singular Hopf bifurcation in systems with two slow variables. SIAM J Appl Dyn Syst2008;
7: 1355–1377.
3.
PerkinsNC.Modal interactions in the non-linear response of elastic cables under parametric/external excitation. Int J Non-Linear Mech1992;
27: 233–250.
4.
MassowCLS.Bifurcation and numerical integration analysis of parametric excitation of inclined cables. PhD Thesis, University of Bristol, UK, 2010.
5.
NayfehAHPaiPF.Linear and nonlinear structural mechanics. New York:
Wiley, 2004.
6.
LeviM.
Qualitative analysis of the periodically forced relaxation oscillations. Mem Am Math Soc1981;
244: 1–147.
7.
KovacicIRadomirovicD.Mechanical vibrations: fundamentals with solved examples.
Chichester:
John Wiley & Sons, 2017.
8.
HartzellSBartlettMSVirginLet al.
Nonlinear dynamics of the CAM circadian rhythm in response to environmental forcing. J Theor Biol2015;
368: 83–94.
9.
YamapiRYonkeuRMFilatrellaGet al.
Effects of noise correlation on the coherence of a forced van der Pol type birhythmic system. Commun Nonlinear Sci Numer Simulat2018;
62: 1–17.
10.
CsernakGStepanG.
On the periodic response of a harmonically excited dry friction oscillator. J Sound Vib2006;
295: 649–658.
11.
ChavezJPBrzeskiPPerlikowskiP.Bifurcation analysis of non-linear oscillators interacting via soft impacts. Int J Non-Linear Mech2017;
92: 76–83.
12.
SieweMSTchawouaCWoafoP.Melnikov chaos in a periodically driven Rayleigh–Duffing oscillator. Mech Res Commun2010;
37: 363–368.
13.
JeevarathinamCRajasekarSMASanjuánF.Theory and numerics of vibrational resonance in Duffing oscillators with time-delayed feedback. Phys Rev E2011;
83: 066205.
14.
WigginsS.Global bifurcation and chaos: analytical methods.
New York:
Springer, 1988.
15.
SadhuS.Canards and mixed-mode oscillations in a singularly perturbed two predators-one prey model. Proc Dyn Syst Appl2016;
7: 211–219.
16.
UpadhyayRKMondalATekaWW.Mixed-mode oscillations and synchronous activity in noise induced modified Morris–Lecar neural system. Int J Bifurcation Chaos2017;
27: 1730019.
17.
KingstonSLThamilmaranK.Bursting oscillations and mixed-mode oscillations in driven Liénard system. Int J Bifurcation Chaos2017;
27: 1730025.
18.
ShimizuKSekikawaMInabaN.Mixed-mode oscillations and chaos from a simple second-order oscillator under weak periodic perturbation. Phys Lett A2011;
375: 1566–1569.
19.
RobertsAWidiasihEWechselbergerMet al.
Mixed mode oscillations in a conceptual climate model. Phys D2015;
292–293: 70–83.
20.
AtabaigiABaratiA.Relaxation oscillations and canard explosion in a predator–prey system of Holling and Leslie types. Nonlinear Anal Real World Appl2017;
36: 139–153.
21.
FenichelN.Geometric singular perturbation theory for ordinary differential equations. J Differ Equ1979;
31: 53–98.
22.
CurtuR.Singular Hopf bifurcations and mixed-mode oscillations in a two-cell inhibitory neural network. Phys D2010;
239: 504–514.
23.
AlexiaGRichardCAnastasiosB.Reconstructing 3-D maps of the local viscoelastic properties using a finite-amplitude modulated radiation force. Ultrasonics2014;
54: 563–575.
24.
YangJHLiuXB.Controlling vibrational resonance in a delayed multistable system driven by an amplitude-modulated signal. Phys Scr2010;
83: 033124.
25.
LaiYCLiuZHNachmanAet al.
Suppression of jamming in excitable systems by a periodic stochastic resonance. Int J Bifurcation Chaos2004;
14: 3519–3539.
26.
DelnavazAMahmoodiSNJaliliNet al.
Linear and nonlinear approaches towards amplitude modulation atomic force microscopy. Curr Appl Phys2010;
10: 1416–1421.
27.
HanXJBiQSZhangCet al.
Delayed bifurcations to repetitive spiking and classification of delay-induced bursting. Int J Bifurcation Chaos2014;
24: 1450098.
28.
WangYYRubinJE.Multiple timescale mixed bursting dynamics in a respiratory neuron model. J Comput Neurosci2016;
41: 245–268.
29.
FallahH.Symmetric fold/super-Hopf bursting, chaos and mixed-mode oscillations in Pernarowski model of pancreatic beta-cells. Int J Bifurcation Chaos2016;
26: 1630022.
30.
SavadkoohiTAManevitchLILamarqueCH.Analysis of the transient behavior in a two dof nonlinear system. Chaos Solitons Fract2011;
44: 450–463.
31.
MelnikovVK.On the stability of the center for time periodic perturbations. Trans Moscow Math Soc1963;
12: 1–57.
32.
GideaMLlaveR.Global Melnikov theory in Hamiltonian systems with general time-dependent perturbations. J Nonlinear Sci2018;
28: 1657–1707.
33.
FreireEGameroERodríguez-LuisAJet al.
Study of a degenerate Bogdanov-Takens bifurcation in a family of mechanical oscillators. Mech Res Commun1998;
25: 287–297.
34.
KuznetsovYA. Elements of applied bifurcation theory. In: Marsden JE and Sirovich L (eds) Applied mathematical sciences 2004; 112: 162–201. Berlin: Springer.
35.
MichielH.De Moivre formula. Encyclopedia of mathematics.
New York:
Springer, 2001.