
Abstract
Wheel out of round, which has a significant influence on the ride comfort of vehicles, is very difficult to detect, especially for vehicles with rubber tires like a monorail. The prominent feature of wheel eccentricity caused by wheel out of round is that there will be a dominant frequency of the vehicle acceleration that varies with the speed of the vehicle, while the wavelengthes are all equal to the wheel circumference. By studying the experimental results of Chongqing straddle monorail, an indirect detection method of the wheel out of round is put forward. Then a simulation model of the monorail vehicle under the influence of the wheel out of round is established. The numerical analysis and experimental results lead to that the main reason for the abnormal vibration of the vehicle is the wheel out of round. Through the analysis of the vertical dynamic equation of the monorail system, all other factors that may affect the dominant frequency of vehicle vibration are analyzed. Finally, it is concluded this abnormal vibration caused by wheel out of round can only be reduced by increasing the vertical stiffness of the air spring and car body mass other than changing wheels.
Introduction
With the increase in urban population, traffic congestion has become a major problem that affects people’s lives. The straddle monorail, with comfortable riding experience and low construction cost, has significantly alleviated traffic congestion. Straddle monorail is a light rail vehicle running beyond the concrete beam, and its structure has been introduced in many academic papers.1–15 Both the straddle-type monorail and the suspended monorail are widely concerned and analyzed by similar methods. Vehicle–bridge coupling system is a traditional method used in the simulation of the vehicle dynamics of monorail.1–6 The finite element (FE) model of the bridge is set up by ANSYS and inputted in Simpack. Through analyzing the interaction of the vehicle–bridge system, the simulation result shall be closer to the experimental data. However, where the dynamic properties of the vehicle system are more concerned, the excitation from the bridge system is simplified as the white noise sequence generated by track spectrum.7–12 To further analyze the dynamic properties of monorail components such as nonlinear forces, a mathematic model of the dynamic system could be set up and solved by Newton iteration method.13,14 The Matlab-Simulink has provided the platform for analysis.
These methods are inadequate for the researches to analyze the characteristics of the wheel, which is treated as a simple spring element. To study the nonlinear compression characteristics of the monorail wheel, Zixue et al. 15 analyzed the interaction of the wheel–rail system by building the FE model of both the wheel structure and the track beam. However, this model cannot be used to simulate the vehicle system. A variety of tire mechanical models are used in the calculation of the automobile system and also to create the monorail system in the Universal Mechanism (UM) software. Recent analysis shows that wheel out of round (OOR) even exists in the vehicles with rubber tires like suspended monorail.
There are many researches devoted to analyzing the wheel OOR of different vehicles. Han et al. 16 developed a rotating flexible wheelset model where the wheel OOR wear with 11th, 15th, and 17th orders is used. Tao et al. 17 carried out a detailed investigation of wheel OOR of the railway vehicle through experiment and mentioned that two types of locomotives suffered from serious wheel OOR. Through field experiment, Wu et al. 18 mentioned that the key issue to judge the existence of the wheel OOR is to find whether the value of the work modal frequency is equal to the value of the the high-order wheel polygon passing frequency. The increase of the contact stress of the wheel–rail system can be the cause of the wheel OOR, which may lead to derailment. 19 Hu et al. 20 employed methods such as finite element analysis (FEA), fracture analysis, and field test and finally proved that the first two natural vibration modes of the vehicle are caused by wheel OOR and the irregularities of the rail surface. Badger et al. 21 provided some technique method to detect the eccentricity of wheel caused by wheel OOR. Liu and Zhai 22 compared two types of OOR wheel models namely the nonperiodic and periodic.The research shows that the vibration of wheelset might be related to the wheel OOR of the dynamic system. Jin et al. 23 revealed that the main cause of the polygonal wear is the running frequency of polygonal wheel, which approaches the resonance frequency of wheelsets. Wu et al. 24 mentioned the dynamic stress of the wheelset axle will increase as a result of polygonal wheel wear excitation. Besides, Meywerk 25 presented a flexible wheelset and rail coupling system to demonstrate the growth of the OOR of the wheel profiles. Almost all the references had mentioned the wheel eccentricity. The prominent feature of wheel eccentricity caused by wheel OOR is that there will be a dominant frequency of the vehicle acceleration that varies with the speed of the vehicle, while the wavelength equals the wheel circumference.26–29
From the experiment of Chongqing monorail vehicle, it is found that the vertical Sperling index of the vehicle exceed the standard, which is caused by the abnormal vibration of the vehicle. This paper aims to prove that the abnormal vibration is caused by the wheel OOR.
Experimental analysis of the results of the straddle monorail
As China’s first monorail in operation, Chongqing monorail has been widely followed with interest. An experiment is carried out to study the running properties of the vehicle. In the carrige, the acceleration sensor is mounted on the floor above the front and rear bogies of the vehicle to test acceleration in all directions, as shown in Figure 1.

Acceleration measurement of the car.
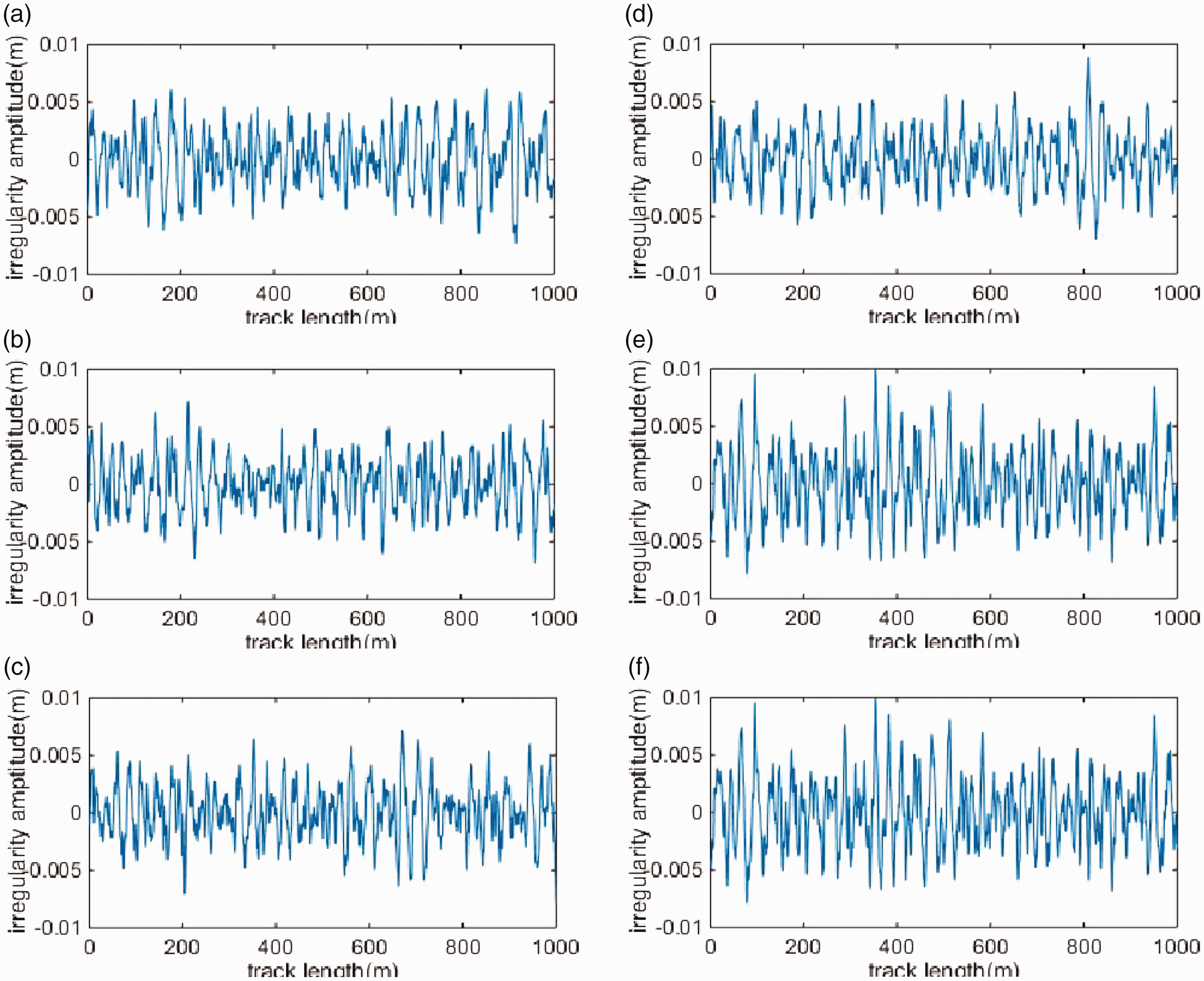
Irregularity of the right rail: (a) the upper left guide rail; (b) the lower left guide rail; (c) the upper right guide rail; (d) the lower right guide rail; (e) the left driving rail; (f) the right driving rail.
Acceleration maximum and acceleration RMS are common indicators for vehicle acceleration evaluation, but this method is not comprehensive. German engineer Sperling has established a formula for calculating vehicle’s ride comfort, considering vibration acceleration at different frequencies.
19
The riding index of a certain frequency fi is calculated according to the following formula

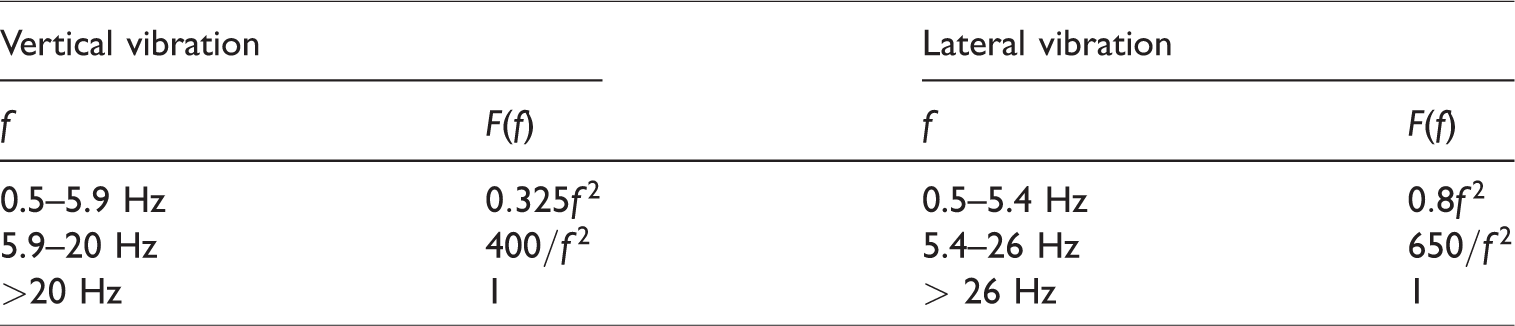
Weighted value of Sperling index in the frequency domain.
The test acceleration data

Where

The final Sperling index is calculated according to the following equation

In the experiment, the test speed of the vehicle is set to 40–70 km/h, which is the designed running speed of the monorail.
The test Sperling index of the vehicle is shown in Table 2.
Sperling indexes of the car body.
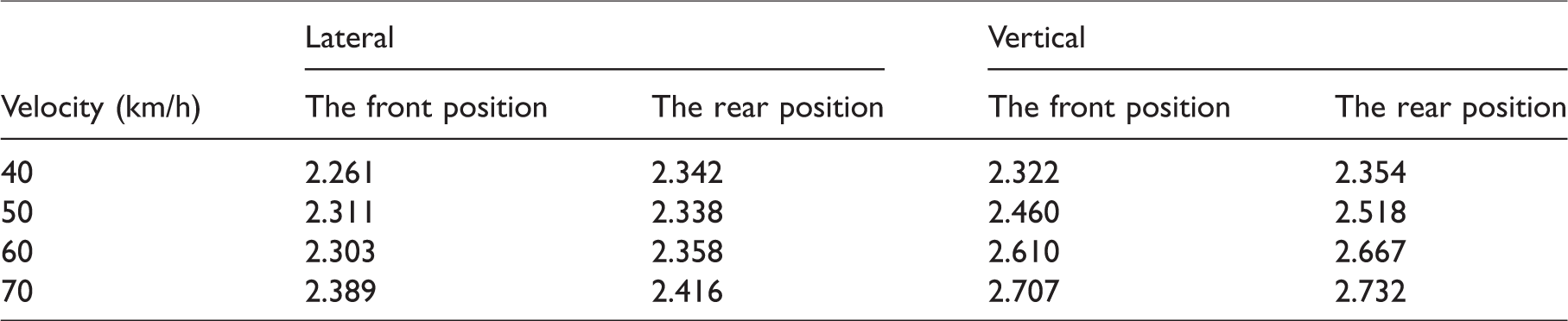
According to the national standard of China GB5599, 30 the Sperling index W < 2.5 denotes excellent; 2.5<W < 2.75, good, and 2.75<W < 3.0, qualified, respectively. From the experimental results, it is seen that the lateral ride comfort of the vehicle has satisfied the designed standard, but the vertical ride comfort could not.
The original US 6th railway track irregularities is generated with respect to American Railway Standard by the US Federal Railroad Administration (FRA). According to the engineers’ experience, when the modified US 6th railway track irregularities is used as road excitation, the simulation results are consistent with the experimental data. 31 The wavelengths of the road irregularities range from 0.5 m to 10 m. Meanwhile, the amplitude of the road irregularities is scaled by the US 6th railway track irregularities. The road irregularities are shown in Figure 2.
In this research, the route under test is a straight line and the wind load is not considered. The algorithm used is the Park method which is an implicit solver of the second order with a variable step size, for stiff ordinary differential equation (ODE) and differential algebraic equation (DAE) in the UM software.
The modular structure and independent post processor are used in the UM, a new Russian dynamics simulation software for the multi-body system. It can be used to analyze not only rigid-body systems with multi-degrees of freedom, but also some complex rigid-flexible coupling systems. It is widely used in the machinery, automobiles, railway vehicles, aerospace, monorail, robots, and so on.
The simulation model in the UM software is shown in Figure 3. The reliability of the developed model could be validated by the previous research. In the previous experiment, the simulated result consists with the experiment data. 32
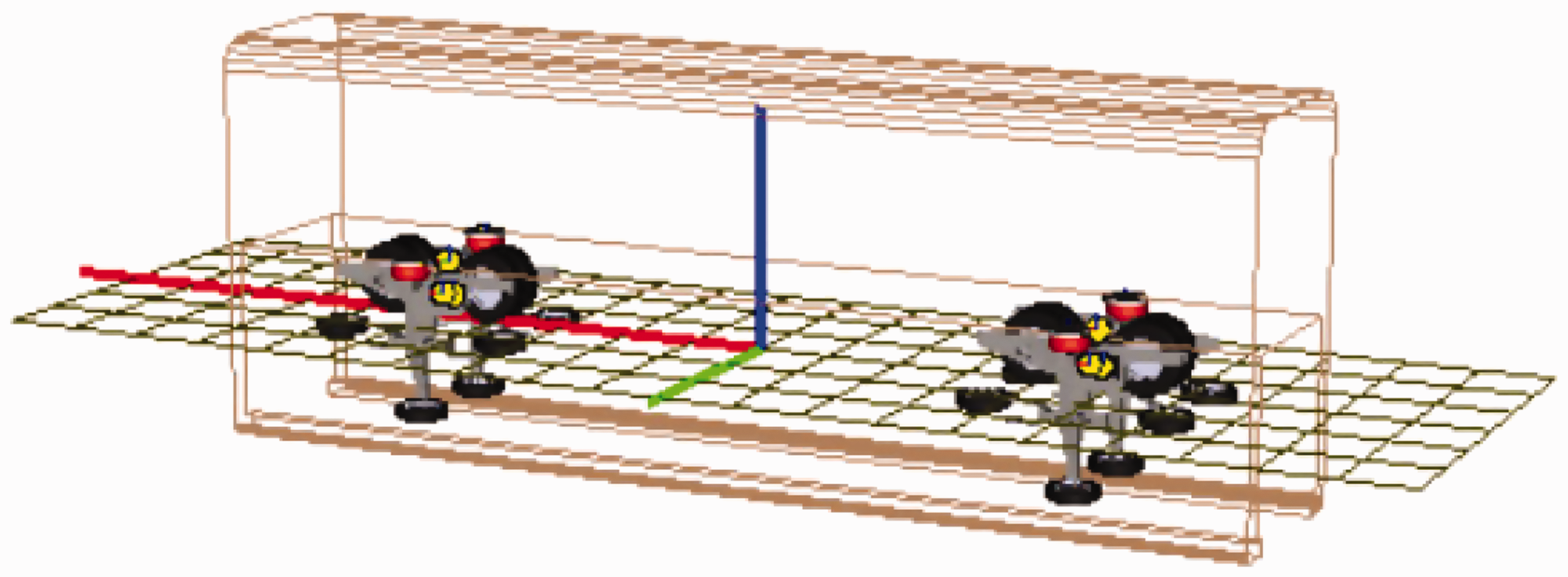
Dynamic model of the monorail vehicle.33
The simulation and experimental data of vehicles running at 60 km/h speed are compared and shown in Figure 4. As shown in these figures, in addition to the main frequency of 2 Hz, there is another dominant frequency that approaches 6 Hz in the the experiment, but there is no such dominant frequency in the simulation results. As shown in Figure 5, when the frequency is 5.9 Hz, the value of weight function of the Sperling index (F(f)/f) is maximum. The abnormal frequency is much close to that value. Besides, the acceleration amplitude at this abnormal frequency is extremly high. According to equation (1), this abnormal vibration can significantly affect the vertical Sperling index of the vehicle. It’s necessary to find out the cause and improve the vehicle ride comfort.
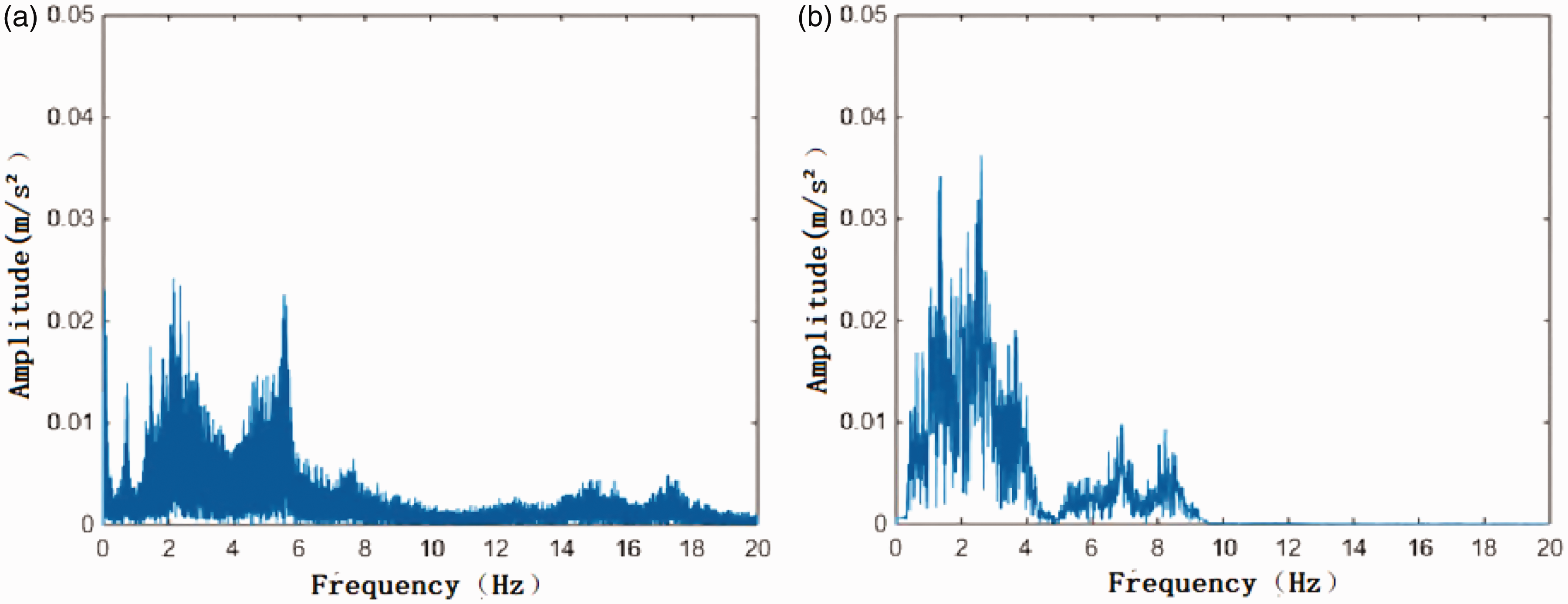
Comparison of the simulated and the experimental data of the vehicle verticle accerleration (60 km/h): (a) experimental data; (b) simulation result.
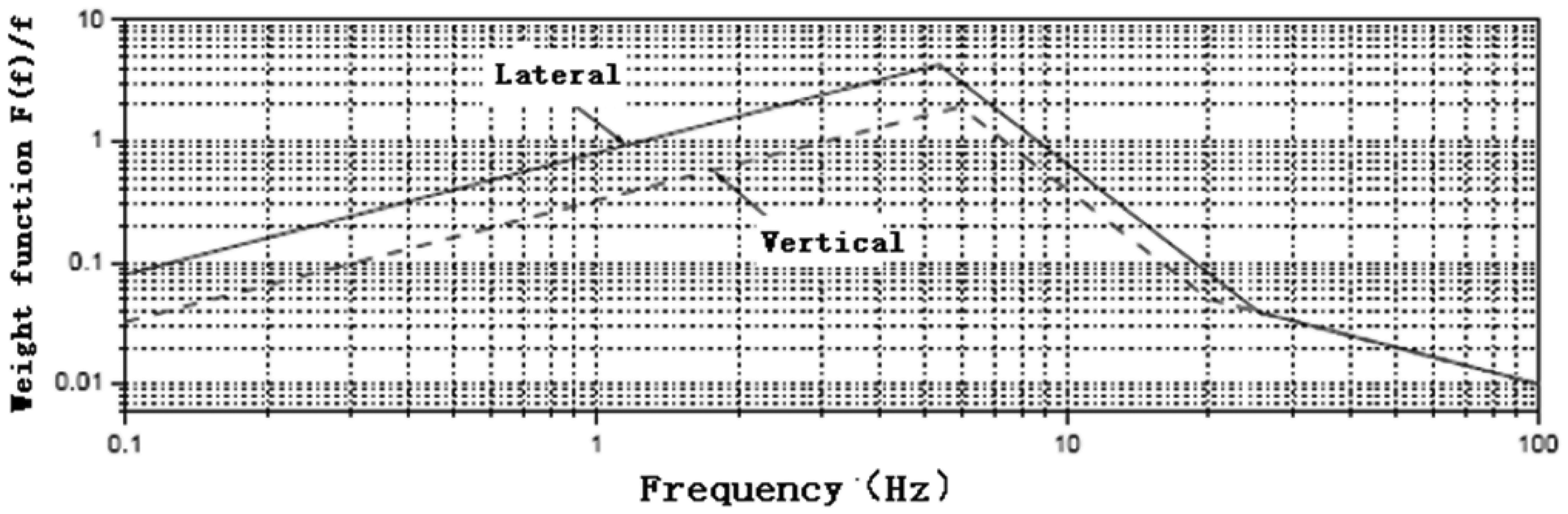
Weight function of the Sperling index. 30
Influence of the track excitation
Under the influence of road excitation, the vehicle abnormal frequency could possibly be the dominant frequency of road irregularities. To obtain the time–frequency characteristics of the vehicle acceleration, it is imperative to make short time Fourier transform for acceleration signals a(t)

Calculated with equation (5), the time–frequency diagram of vertical acceleration of the vehicle is shown in Figure 6. The x-coordinate is the time, and the y-coordinate is the frequency of the acceleration. The color, ranging from white, green, purple to black, denotes the increasing amplitude of the acceleration. Taking the data of the vehicle running at the speed of 60 km/h as an example, as shown in Figure 6, it is obvious that the abnormal frequency closing to 5 Hz does not change with time. If the abnormal frequency is caused by road excitation, it varies as the vehicle passes through different sections. It can be seen from the analysis data that the abnormal frequency is not caused by road excitation.
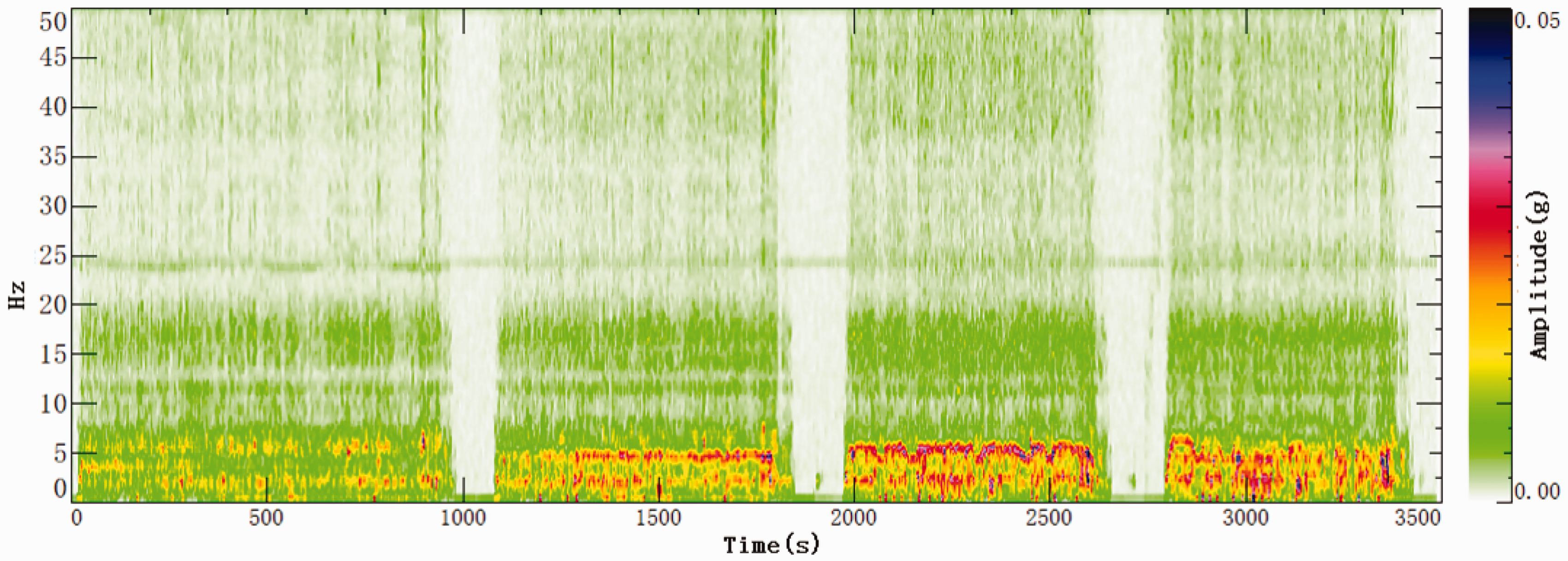
Time–frequency response of vehicle vertical acceleration (60km/h).
Influence of wheel out of round
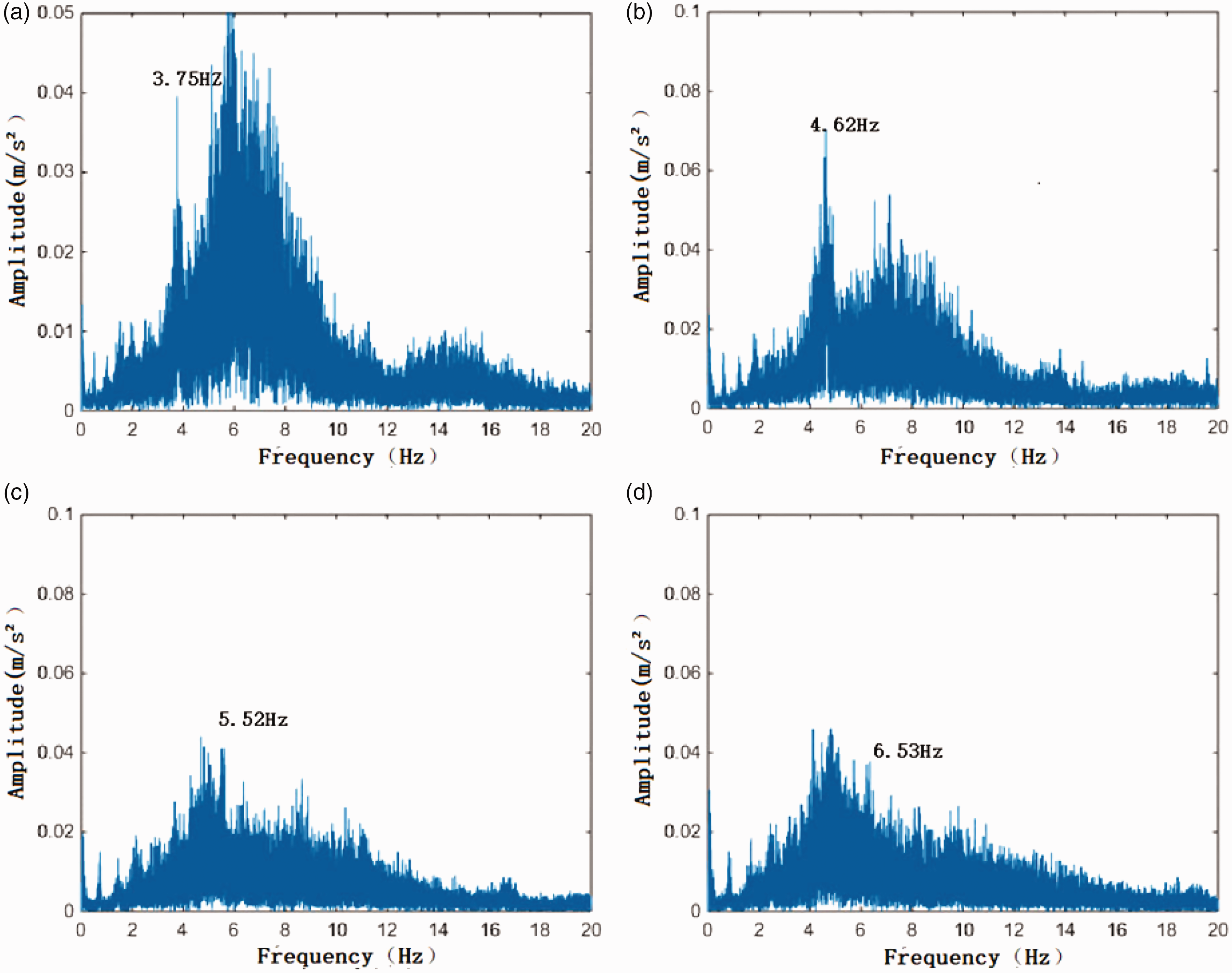
To further analyze the cause, the experimental amplitude-frequency responses of the vehicle’s vertical acceleration at different speeds are shown in Figure 7. It can be clearly found that there is an abnormal dominant frequency in the vehicle acceleration at different speeds respectively. As the vehicle running speed increases, the abnormal frequency increases accordingly.
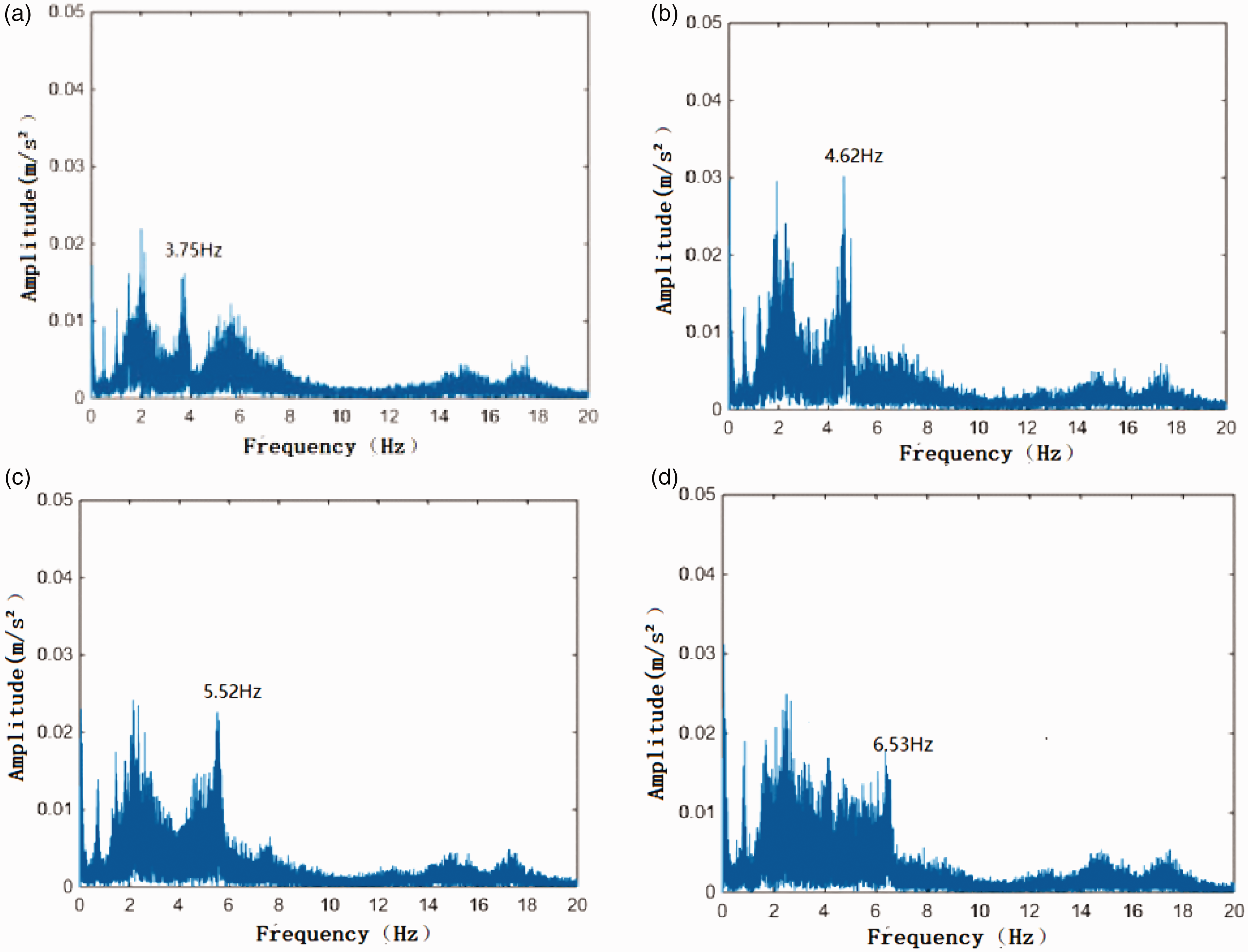
Vertical acceleration amplitude–frequency characteristics of car body at different velocities in experiment: (a) 40km/h; (b) 50 km/h; (c) 60 km/h; (d) 70 km/h.
According to equation (6), the wavelength (m) of the abnormal frequency (Hz) at different speeds (m/s) is calculated and shown in Table 3.

Wavelength of the abnormal frequency at different speeds.

It is shown that the wavelengths of the abnormal frequency are much similar ranging from 2.96 to 3.02 m. Different from the suspended monorail, there is no reinforcing rib on the track beam. The span of the track beam pier is much larger than 3 m. So, this frequency is not caused by the pier span.
The radius of the driving wheel is 0.503 m and the compressed deformation of the wheel is 0.0296 m. So, it is obtained that the rolling circle radius is 0.4734 m and the rolling circle circumference is 2.97 m, which is much closer to the wavelength of the abnormal frequency.
As shown in Figure 8, this frequency of the abnormal vibration also exists in the bogie, meaning this abnormal vibration is transmitted by driving wheels. The frequency of the abnormal vibration changes with the speed of the monorail, meaning this frequency is not the natural frequency of the bogie. Therefore, it is assured that these vibrations are caused by the wheel out of round.
Vertical acceleration amplitude–frequency characteristics of car body at different velocities in experiment: (a) 40 km/h; (b) 50 km/h; (c) 60 km/h; (d) 70 km/h.
The wheel OOR, as a very common phenomenon on railways, has been widely studied. There are mainly two methods to simulate the wheel OOR shown in Figure 9. The first method is to transform the wheel OOR into track irregularities and keep the wheel radius constant. The equation of the track irregularity is shown as follows

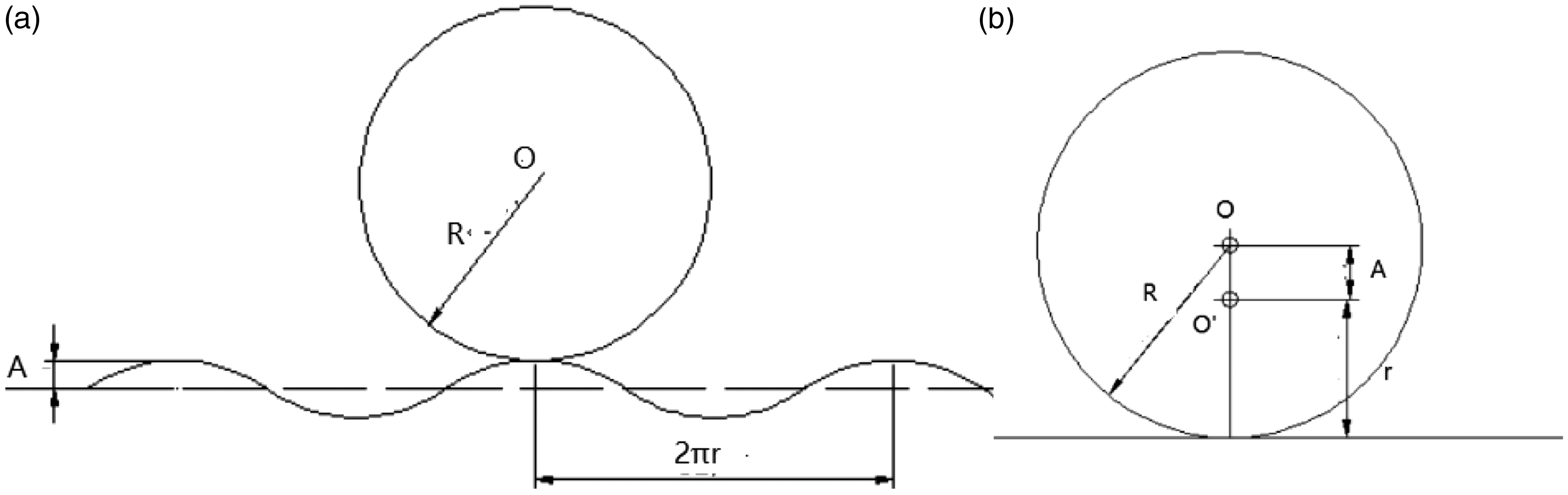
Simulated method to show wheel OOR: (a) the first method; (b) the second method.
The second method is to describe the wheel OOR by using the harmonic deviation of the wheel radius. The equation of the harmonic deviation is given as follows

The first method is used in this paper.
Figure 10 shows the relationship between the eccentricity and the vertical acceleration amplitude of the car body. As shown in the figure, when the eccentricity increases, the vertical acceleration of the car body increases correspondingly but the variation trend of the acceleration with the speed does not change.
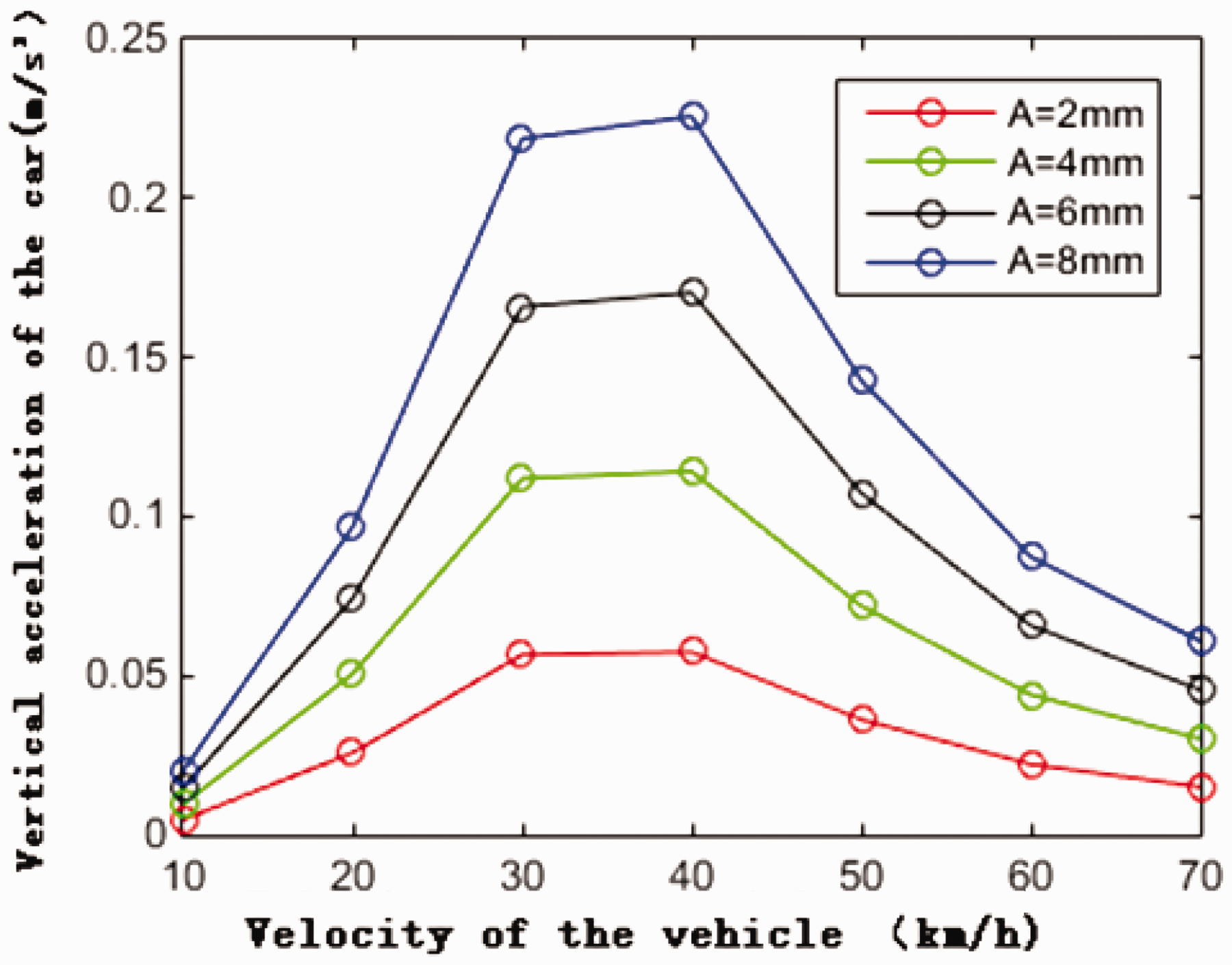
Relationship between the eccentricity and the vertical acceleration amplitude of the car body.
The eccentricity is set as 6 mm. The amplitude frequency responses of vertical acceleration of vehicle body at different speeds are shown in Figure 11.
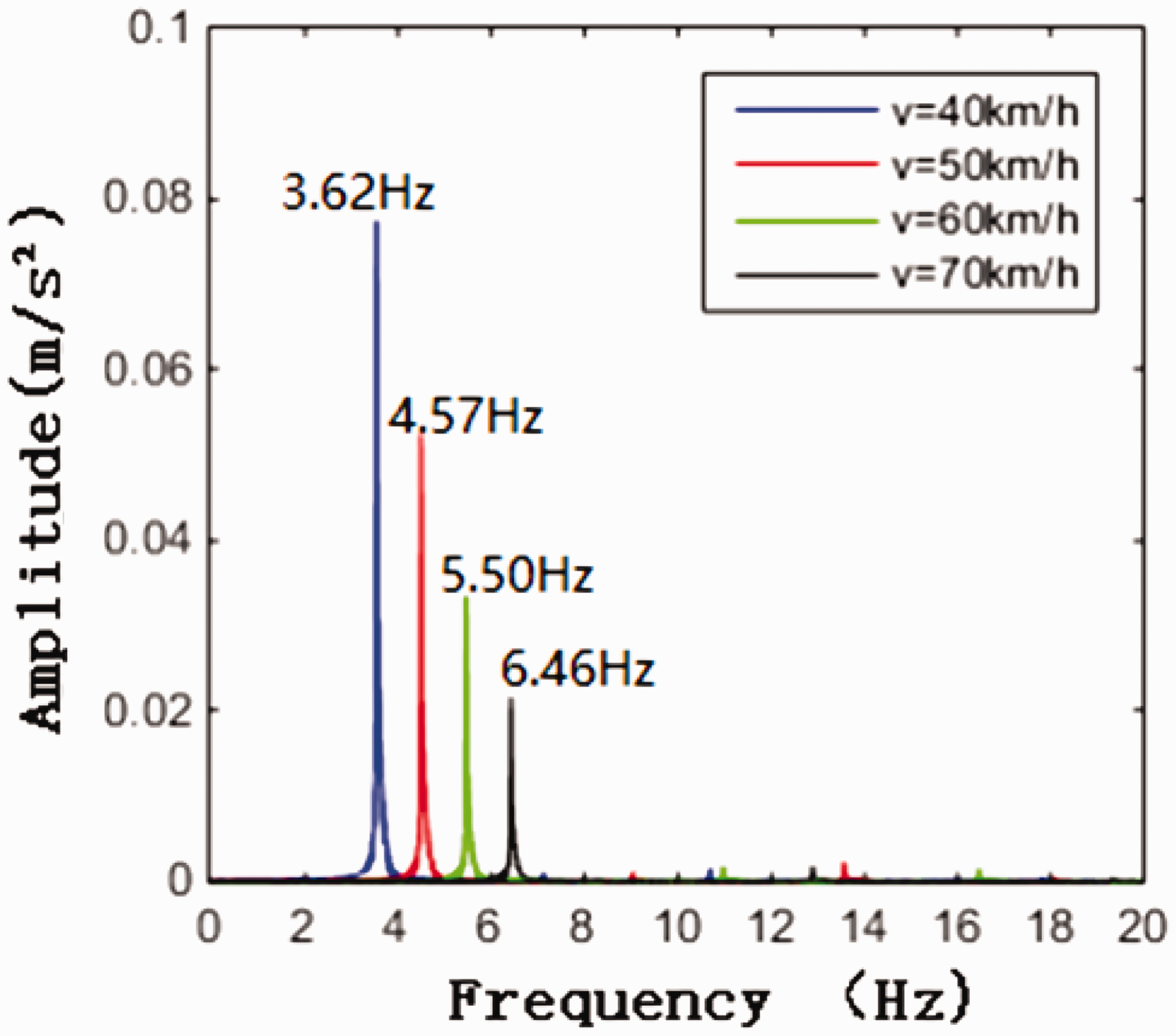
Simulated dominant frequency of the car body vertical acceleration caused by wheel OOR.
As shown in the figure, under the influences of the wheel OOR, there exists a dominant frequency at different vehicle speeds. Table 4 shows the experimental abnormal frequency of the car body acceleration and the simulated dominant frequency caused by the wheel OOR.
Experimental and simulated dominant frequency of the car body acceleration.

The simulation results of wheel OOR show that the frequency generated by the wheel OOR is basically consistent with the experimental abnormal frequency.
Effect of the wheel OOR
In order to analyze the effect of the wheel OOR, the track irregularities generated by wheel OOR is added on the actual track irregularities. Then the vertical Sperling indexes of the vehicle under the effect of the track excitation with and without wheel OOR are shown in Figure 12, respectively. It shows that the wheel OOR indeed makes the Sperling index increase, especially at low speed. For maintaining the ride comfort of the monorail, it is necessary to reduce the wheel OOR as far as possible.
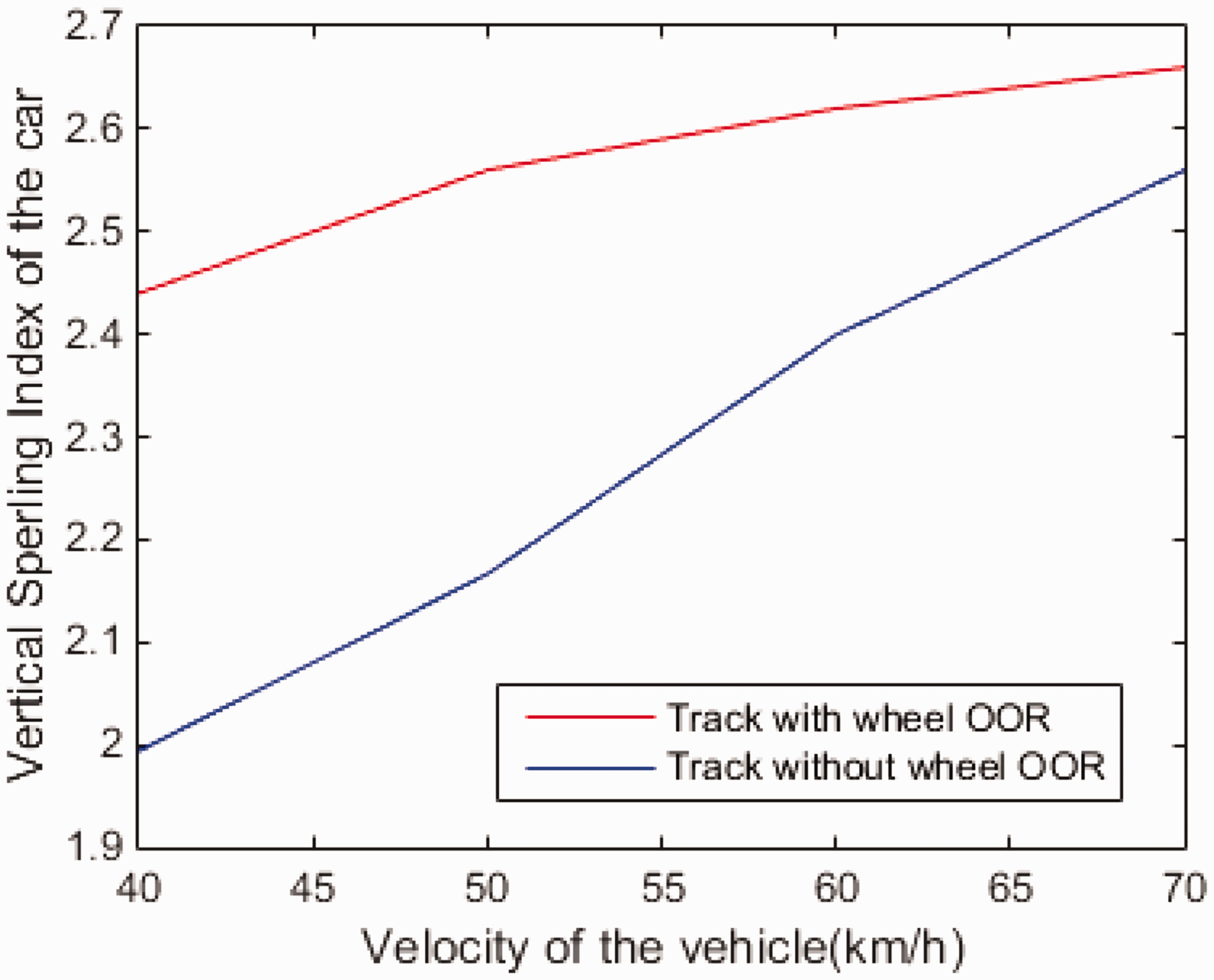
Vertical Sperling index of the track with and without wheel OOR.
Alleviate the influence of the wheel OOR without changing wheels
It is necessary to find the main factors that could affect the vertical vibration in order to alleviate the influence of the wheel OOR. The vehicle is composed of two bogies and one car body. The driving wheels have the function of supporting the vehicle and driving it forward. There are four guide wheels in a bogie to guide the monorail and two stable wheels balancing the body of the car so that the vehicle will not overturn when it passes curves. The air spring plays a role for the secondary suspension system. For the multidirectional elasticity of the rubber tire, there is no primary suspension system in the monorail vehicle. Vertical shock absorbers have the function of auxiliary shock absorption. Traction rubbers drive the car body forward, and longitudinal and lateral stops prevent the displacement between bogies and car body from being too large in the longitudinal and lateral directions. However, they have no effect on the vertical vibration of the vehicle.
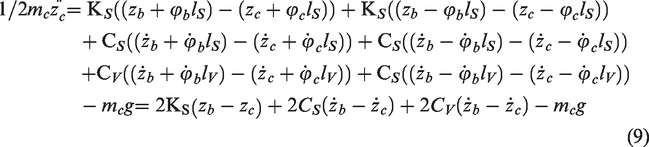
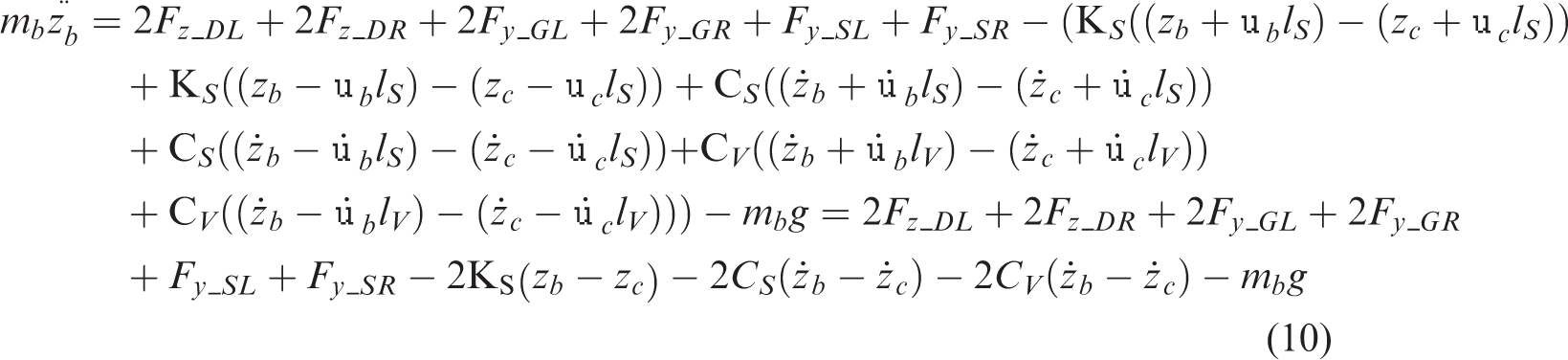
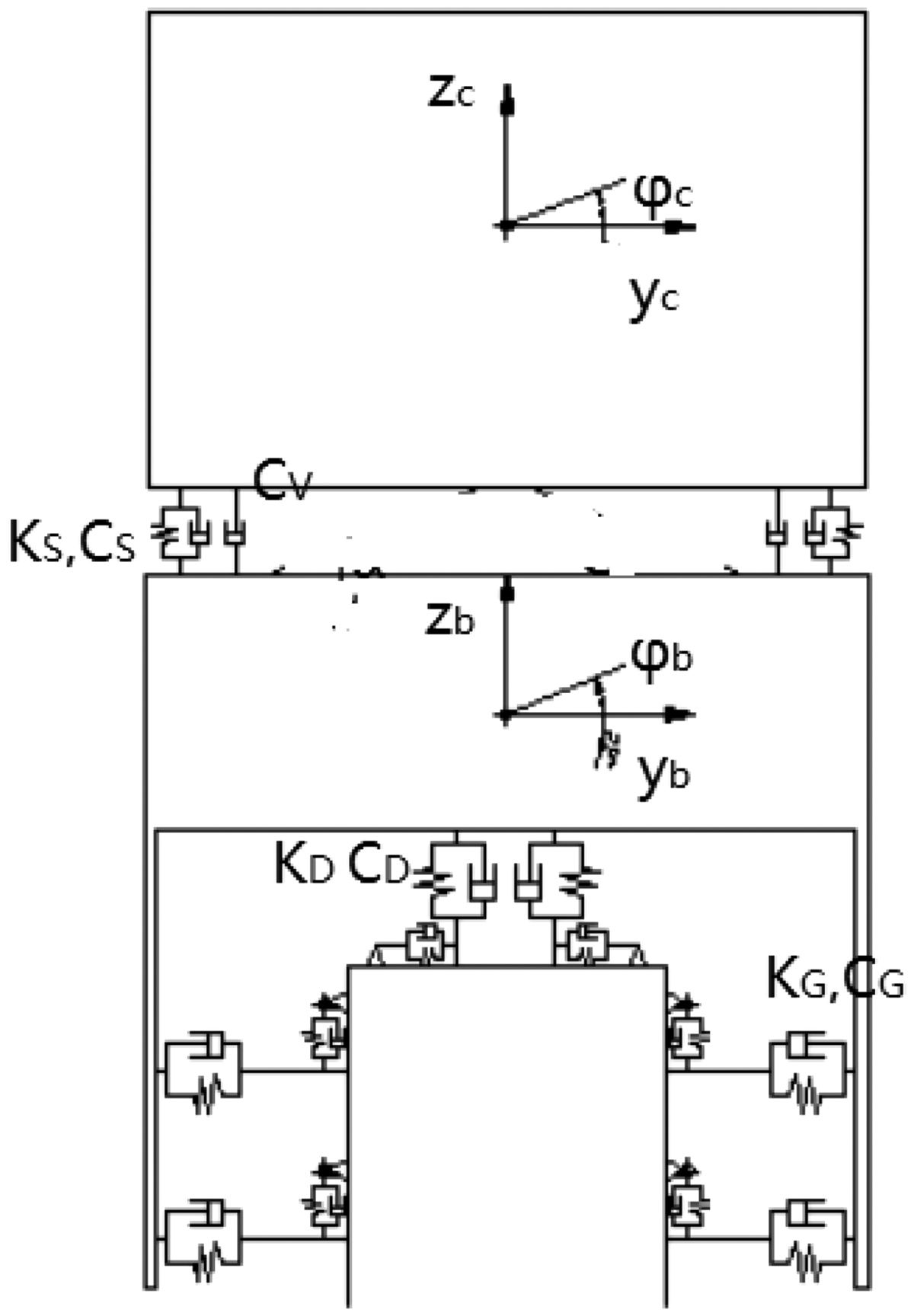
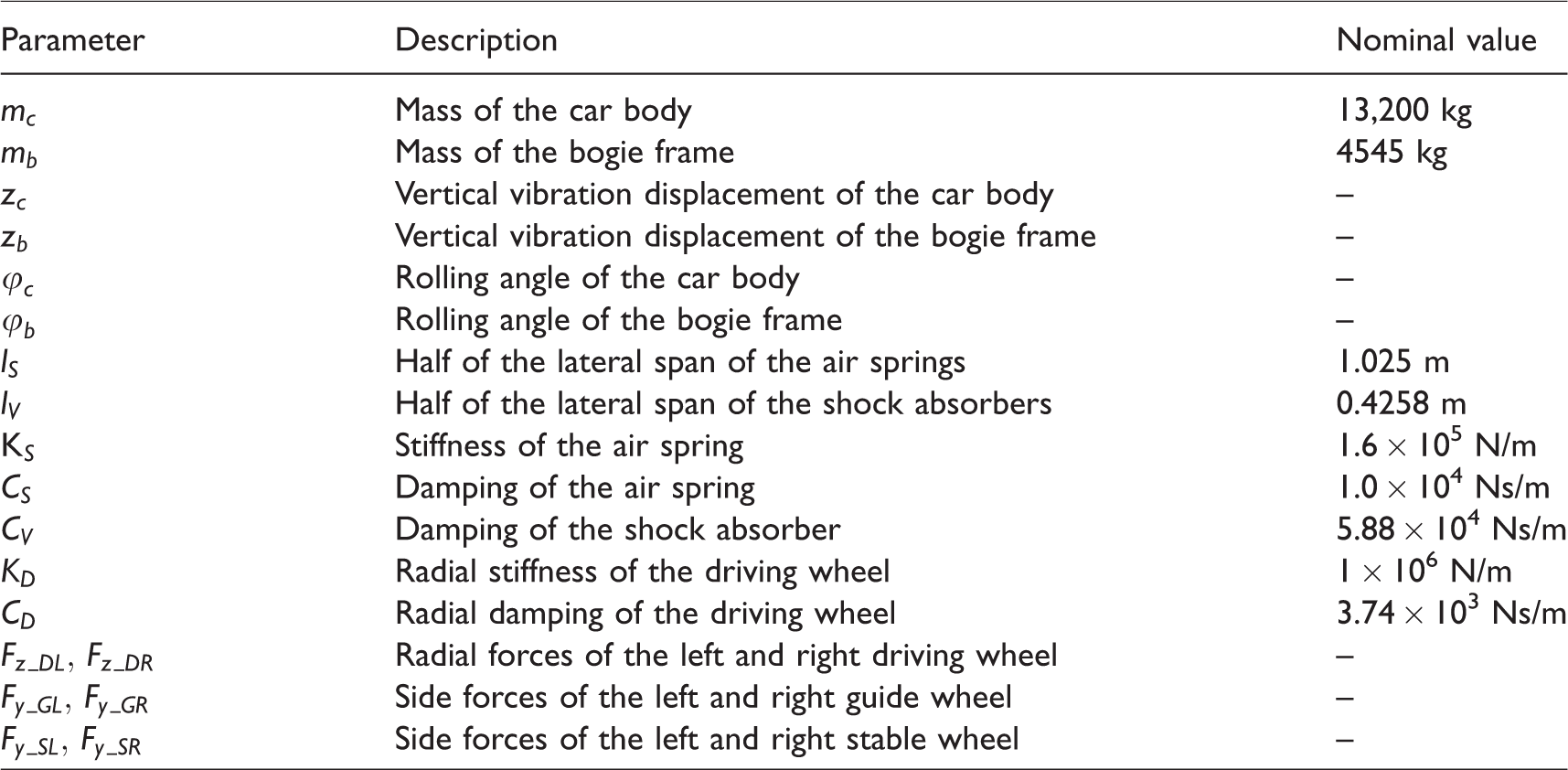
The vehicle’s vertical dynamic system is shown in Figure 13. The experimental route is straight. As shown in Table 2, the value of the vertical Spering indexes of the front and rear of the car body are similar, which means the pitching vibration of the vehicle is not fierce at all. The vertical vibration equations of the dynamic system are established as equations (9) and (10). In this dynamic model, the pitching vibration is neglected. The parameters and variables are listed in Table 5.
Structure of the vehicle.
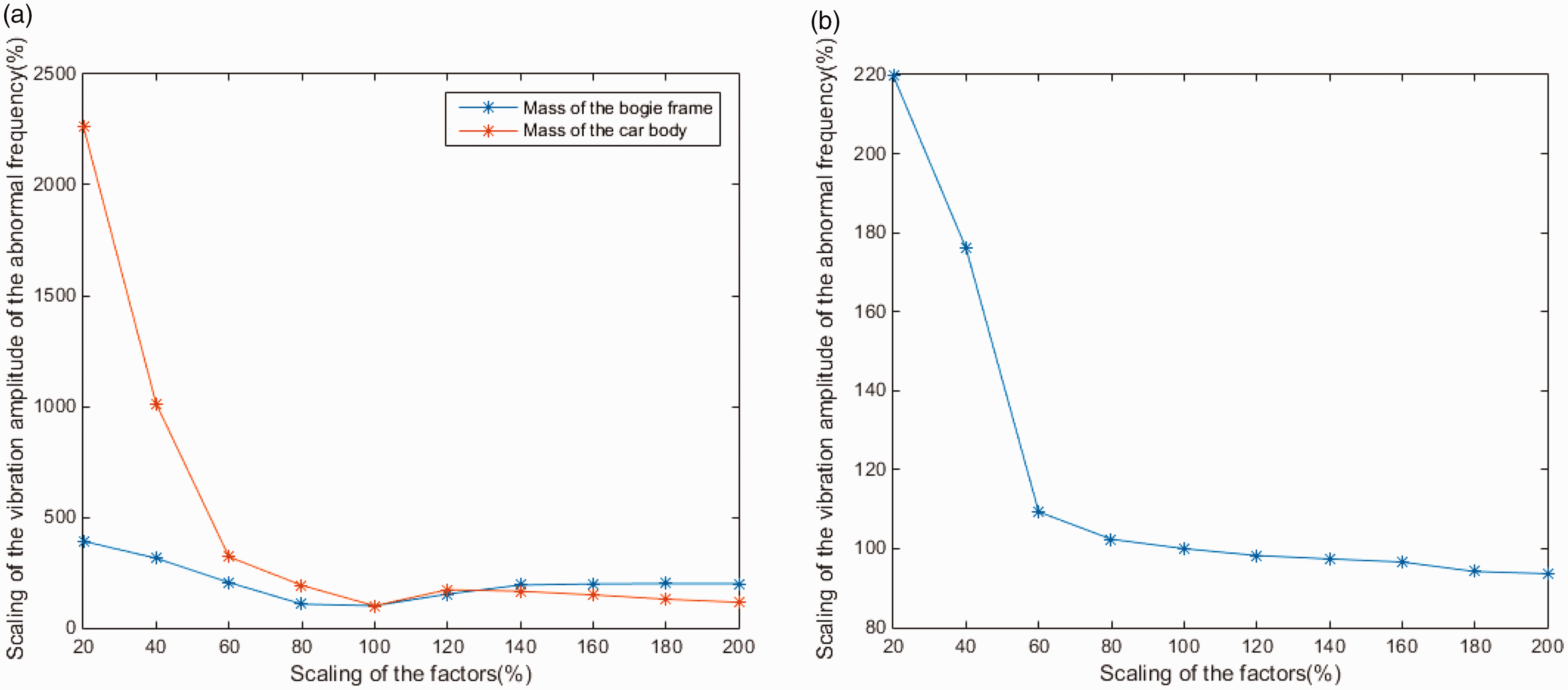
Scaling of the vibration amplitude of the abnormal frequency at different values of the factors: (a) mass of the bogie frame and car body; (b) vertical stiffness of the air spring.
Parameters and variables of the dynamic system.
According to the FIALA tire model that is used in the simulation process, the equation of the tire side force can be shown as follows

Case 1 
Case 2 
As for the monorail dynamic system, the values of the side slip angles of the guide wheels and stable wheels are equal to the pitching angle of the bogie, while, as mentioned before, the pitching vibration of the bogie is not considered in this paper. Thus, the value of 
In this equation,
When the vibration frequency is low enough like the abnormal frequency in this experiment, the values of the damping coefficients, which are much smaller than the value of the stiffness of the tires and air springs, play a lesser role than the stiffness. From the above analysis, it can be seen that the major factors affecting the vertical acceleration of the vehicle are as follows.
Mass of the car body Mass of the bogie frame Stiffness of the air spring Stiffness of the driving wheel External excitations which travel up the driving wheel
The external excitation can be divided into two parts:
Track excitation; Excitation caused by the wheel OOR.
Through the earlier analysis, other factors except for wheels affecting the vertical vibration are car body mass, bogie frame mass, and vertical stiffness of the air spring. In this part, the influences of these factors are analyzed respectively.
Because the wheel OOR is hard to measure, this part is devoted to analyzing the solution of the abnormal vibration caused by wheel OOR without changing the wheels. The factors needed to be changed are car body mass, bogie frame mass, and vertical stiffness of the air spring.
By using the simulation model of wheel OOR, we scaled factor values, namely the car body mass, the bogie frame mass, and the vertical stiffness of the air spring, ranging from 20% to 200%, and accordingly we obtained the scaling of the vibration amplitude of the abnormal frequency. The scaling of the vibration amplitude of the abnormal frequency is shown in Figure 14.
As shown in the figure, increasing or decreasing the mass of the bogie frame is not effective for alleviate the abnormal vibration caused by wheel OOR. This abnormal vibration can be alleviated by increasing the vertical stiffness of the air spring or the mass of the car body.
Conclusions
By comparing the simulation results with the experimental data of Chongqing monorail, it is found that there exists an abnormal dominant frequency in the experimental vertical acceleration, but the frequency does not appear in the simulation results. This research aims at detecting the cause of the abnormal vibration and solving the problem.
Through analyzing the time–frequency response of the vehicle vertical acceleration, the influence of the road irregularities can be excluded. Through the analysis of the experimental data of the bogie and car body at different vehicle speeds, the wavelengths of the abnormal frequency at different speeds are similar and approximately equal to the wheel circumference. After excluding the other influence factors, it can be concluded this problem is caused by the wheel OOR. From the simulation results of wheel OOR, we may draw the same conclusion that these abnormal vibrations are caused by the wheel out of round.
From the mathematical analysis of the vehicle dynamic model, except for the parameters of wheels and the road irregularities, it can be noticed that the parameters actually affecting the vertical vibration of vehicles are the mass of the car body, the mass of the bogie frame, and the vertical stiffness of the air springs. Through simulation, increasing or decreasing the mass of bogie frame is not effective for alleviating abnormal vibration caused by wheel OOR. This abnormal vibration can be alleviated by increasing the vertical stiffness of the air spring or the mass of the car body. This problem can be solved by choosing suitable parameters.
Footnotes
Acknowledgements
The authors acknowledge the contributions of Mr Pingbo Wu and Lai Wei for conducting the experiments and data acquisition.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was funded by the National Key R&D Program of China (Grant 2017YFB131201303-09).