
Abstract
The vehicle semi-active suspension is a typical multiple-input multiple-output system with strong couplings, actuator constraints and fast dynamics. This paper addresses the damping force regulation of shock-absorber in vehicle semi-active suspensions using an explicit model predictive control (EMPC) approach, which allows minimizing the system control objective function while satisfying the actuator constraints. The main advantage of the proposed approach is that the control law computation requirement is low, and thus the EMPC system is suitable for implementation in a standard automotive microcontroller. The design of the EMPC system consists of mathematical modeling, objective function determination, controller formulation and simulation validation. Presented simulation results verify that a superior control performance of the vehicle semi-active suspension system is achieved by the proposed EMPC control approach compared with the performance obtained using conventional control method.
Keywords
Introduction
Advanced suspension systems are widely used in modern vehicles, due to their merits of improving ride comfort and handling performance.1–3 In the past few decades, the active/semi-active suspension systems with advanced electronic control technology have caused extensive concern of researchers. 4 The active suspension systems can significantly improve the suspension performance by controlling the force of the actuator directly, but high cost and high energy consumption are the key factors restricting its development. 5 Although the performance of the semi-active suspension is slightly inferior to that of the active suspension, simple structure, low cost and low energy consumption are its main advantages, which make it have good prospects for engineering applications. 6 To improve the control performance of the semi-active suspension, a variety of control methods, such as the optimal control, the sliding mode control and the fuzzy adaptive control,7–9 have been adopted for the controller design. However, these control methods are often difficult to deal with the constraints of system states and damping force regulation when applied to the vehicle semi-active suspension. 10
For the ability to handle the constraints on manipulated variables in multiple-input multiple-output (MIMO) systems, model predictive control (MPC) is one of the most promising methods in industrial applications.11–13 MPC uses the system dynamic model to predict the evolution of the system states as a function of control inputs over a finite prediction horizon and calculates a sequence of optimal control inputs by minimizing a cost function over a finite control horizon. In addition, MPC applies only the first input of the calculated control sequence, the prediction horizon is moved forward one step and the process is then repeated. More importantly, compared with conventional regulators that only optimize the system control performance around a given initial state, MPC can optimize the control problem at each time step and results in higher flexibility in dealing with the constraints on inputs, outputs and states. 14 MPC is now widely used in the field of process industry, such as the chemical industry and the petroleum refining industry, thus achieves great economic and social benefits. 15
According to the difference of control scheme, MPC method can be further divided into several types, such as the generalized predictive control, the nonlinear MPC and the robust MPC, and all these MPC methods have been applied in the engineering control field.16–18 However, due to a finite-horizon optimal control problem that needs to be solved in each sampling period, the computation time requirement considerably limits the bandwidth of processes to which the MPC can be applied. 19 Higher computation burden leads to higher requirements on the processing power of the controller hardware and, furthermore, higher requirement on the cost. Therefore, such predictive control methods are not suitable for the production vehicle semi-active suspension systems. To solve this problem, the explicit MPC (EMPC) method, which has the potential ability to reduce hardware cost and amount of computation needed for the implementation, has attracted great interest in engineering.20–22 The EMPC approach is based on doing most of the required computation off-line by using multi-parametric programming technology (MPT), leaving only part of the computation for the online part of the implementation.23,24
In this paper, several aspects of designing an EMPC controller for a vehicle semi-active suspension system are proposed. The main contribution of this paper is to form a complete procedure in formulating an EMPC controller for damping force regulation of shock-absorber according to the research experience, particularly on the method of defining an accurate control problem for the full-car semi-active suspension system and establishing an augmented EMPC controller. The performance of the proposed EMPC approach will be compared with well-established “two state” skyhook control algorithm for a vehicle semi-active suspension system through numerical simulation, and the simulation results support the proposed method.
This paper is organized as follows. After the introduction, the system description and modeling of a vehicle semi-active suspension system are described. The EMPC controller is then designed, which is followed by simulation results. Finally, the conclusions are summarized.
System description and modeling
Full-car semi-active suspension system
The schematic of a full-car semi-active suspension system is shown in Figure 1.25,26 The vehicle is assumed to drive at a constant speed v, the chassis, the engine and the wheels are modeled as rigid bodies.
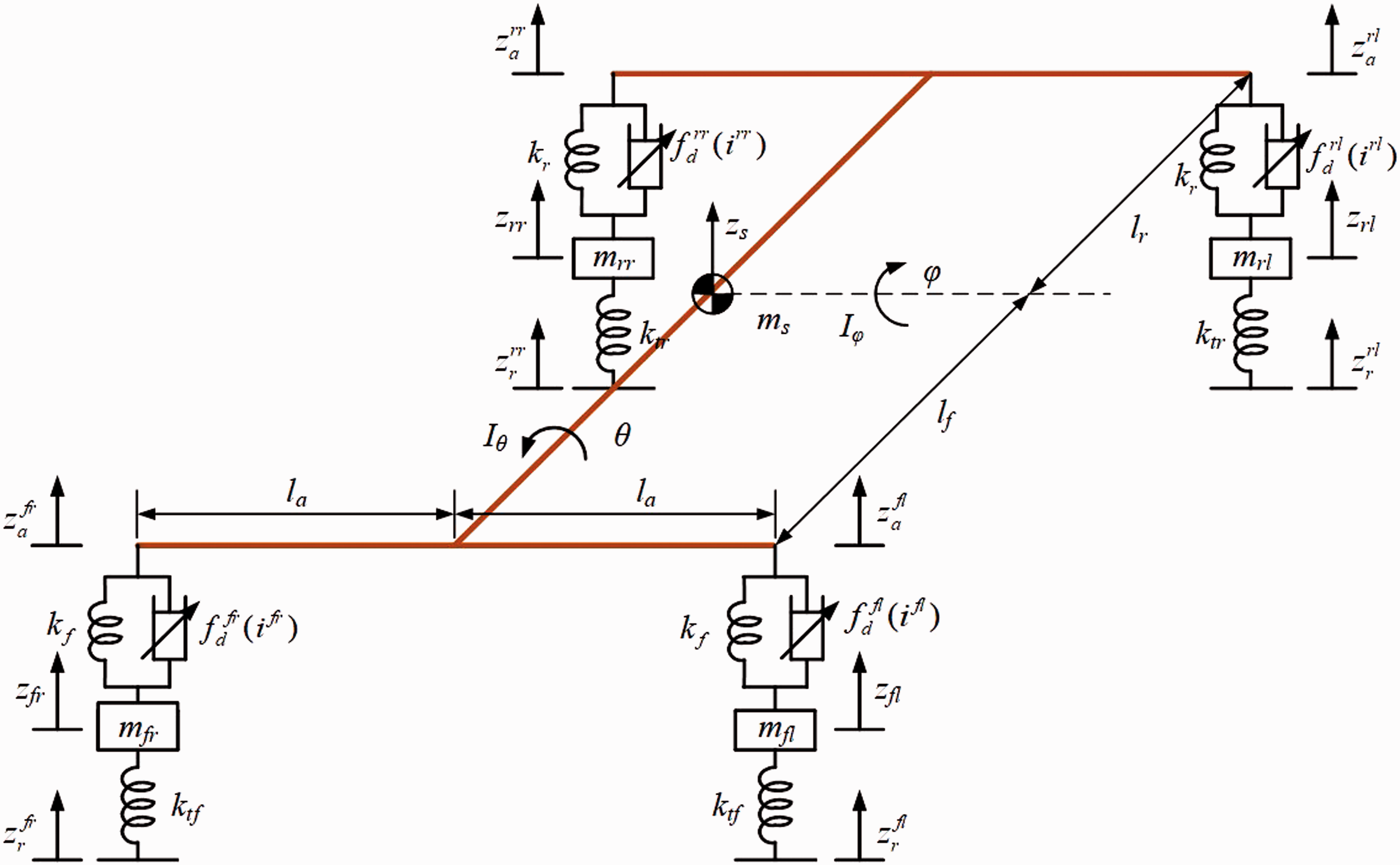
Full-car semi-active suspension schematic.
In the figure, the parameters characterizing the model include the sprung mass ms, the roll moment of inertia Iθ, the pitch moment of inertia Iϕ, the front and rear unsprung masses on the right and left sides mfr, mfl, mrr and mrl, the tyre stiffnesses of the front wheel and the rear wheel ktf and ktr, the constant spring stiffnesses of the front wheel and the rear wheel kf and kr, the distances between the center of gravity to the front and the rear axis lf and lr, half of the distance between the left wheel and the right wheel la; the variables describing the model include the vertical displacement at the center of gravity zs, the roll and pitch angles of the vehicle body θ and ϕ, the vertical displacements of the sprung mass at four corners
Since the roll and pitch angles of the vehicle body are relatively small, thus the following linear geometrical relationships can be obtained
27

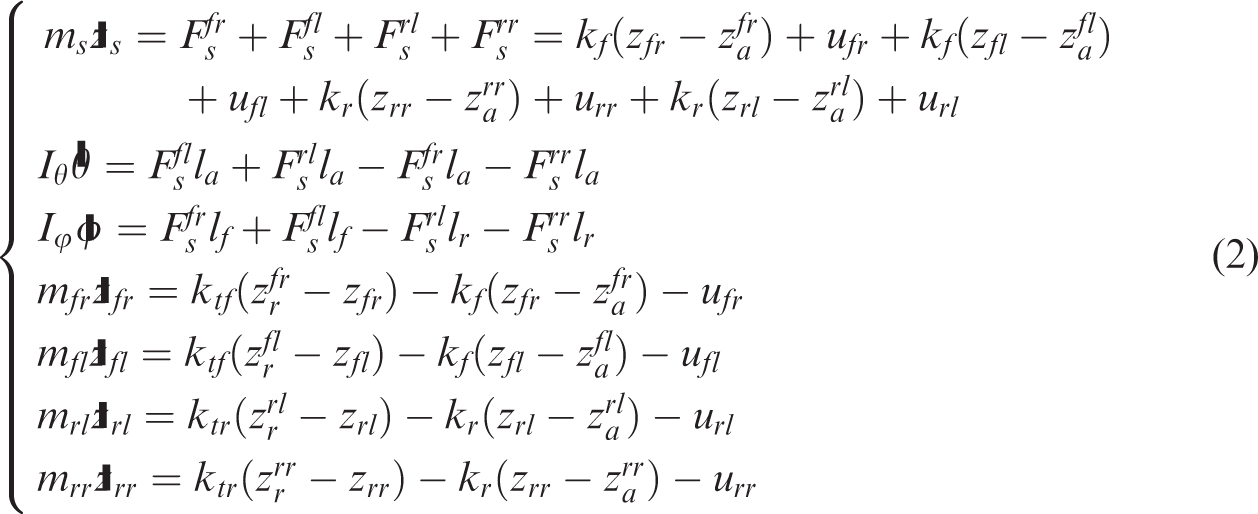
Then, the motion equations of the full-car semi-active suspension model are presented as
Adjustable damping force
In vehicle semi-active suspension systems, the adjustable damping force is


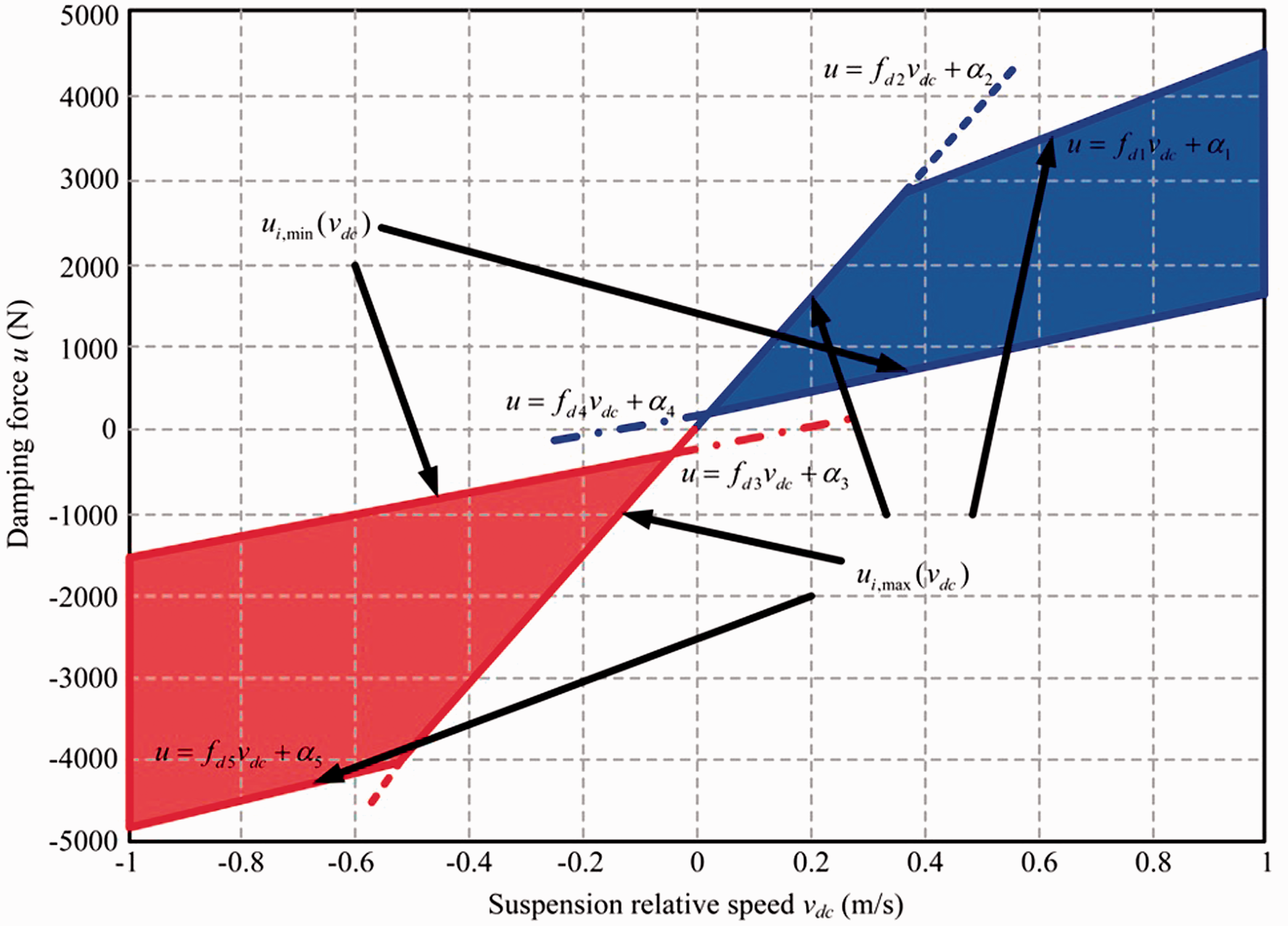
Force-current map of a damping adjustable damper.
According to the force-current map, the above constraint can be further given in a more detailed form as

Explicit model predictive control design
MPC controller design
One of the ideas of MPC is the explicit use of a model to predict the process output at future time instants, thus as an optimization-based control law, the system optimal solution relies on an accurate dynamic model of the process, which satisfies given constraints and minimizes a quadratic performance measure.
29
According to the differential equations shown in equation (2), a state space form of the system model with can be rewritten as



Similarly, the coefficient matrices

By choosing a suitable sampling period T and discretization methodology, a discrete time model, which meets the requirement of MPC controller design, can be further obtained in state space form
30

The design objective of MPC controller is to find an optimal control law

The adjustable damping force constraint (5) can be rewritten as linear inequalities on the controlled force

Note that the above constraints (12) are defined based on the sign of the predicted vehicle suspension relative speed
Then, the MPC control law for the vehicle semi-active suspension system can be obtained by applying the following receding horizon strategy:
Get the system state Solve the following quadratic problem through mixed integer programming techniques
Apply only the first input of the calculated control sequence The prediction horizon is moved forward one step and the process is repeated at time t+1.

Achievement of EMPC control
Although the vehicle semi-active suspension control law has been derived based on the MPC techniques, the application of the above procedures cannot be actually achieved in a standard automotive microcontroller, since it requires the solution of the optimization problem (13) at each sampling period. As a fast dynamics system, the required solve time of this task cannot meet the system real-time control requirements obviously. This motivates the recent research efforts devoted to reduce online computation time and computational resource requirements of the MPC techniques. In particular, an explicit piecewise linear solutions of the MPC problem, i.e. EMPC, based on MPT have been introduced. 34 In the EMPC approach, all the computations necessary for the implementation of the EMPC are performed offline. Then, the EMPC controller just needs to provide the control action as a function of the system states and hence can be less computationally demanding than the classic MPC approach. Figure 3 provides a brief implementation procedure of the EMPC approach. 35
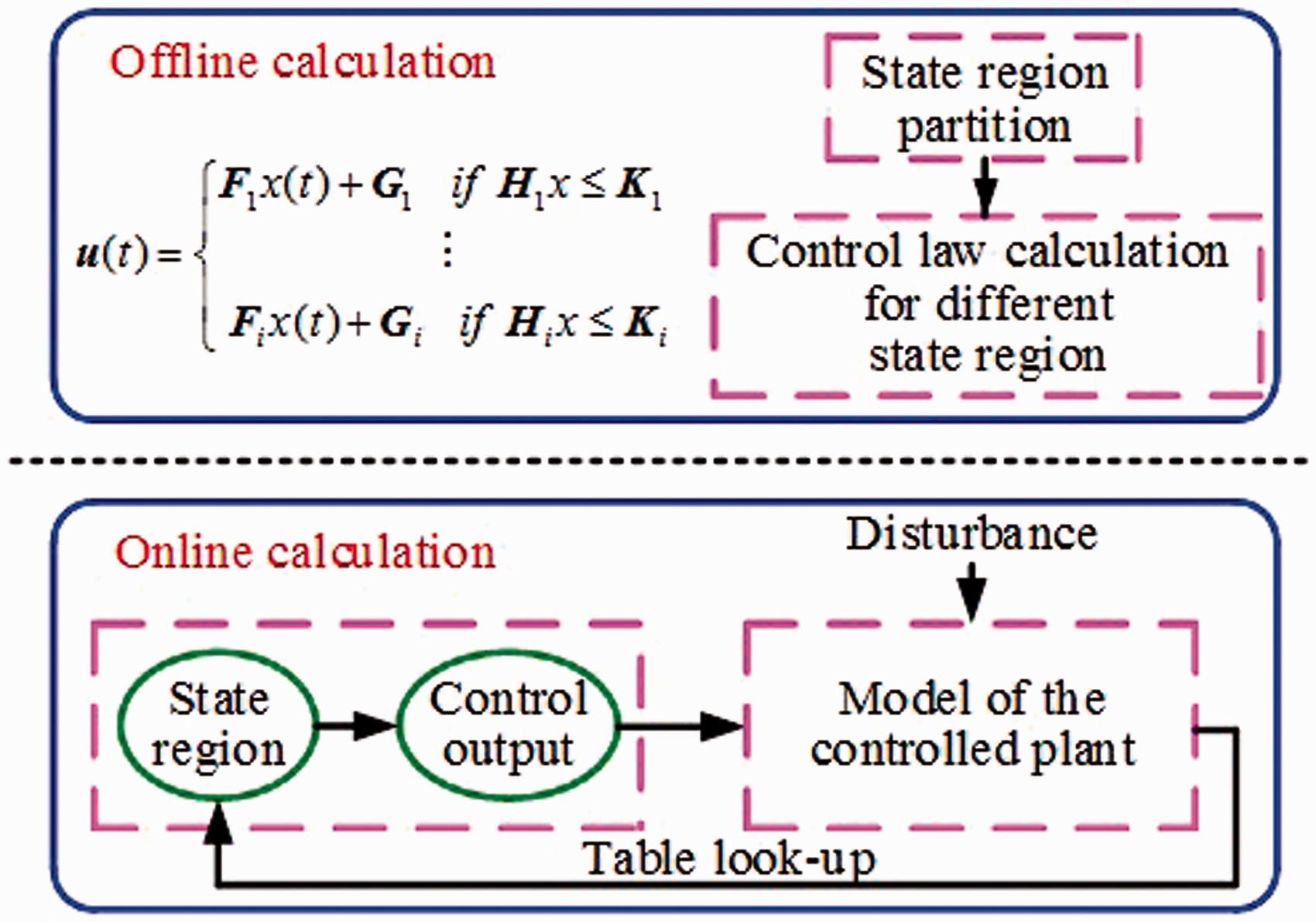
Implementation procedure of the EMPC approach.
In the figure, i is the number of the system state regions,


That is,


A direct way of solving this problem is to use constraints


The above expression (19) shows that
Simulation results and analysis
Performance evaluation settings
The performance of the proposed EMPC control method is validated by numerical simulations in this section. To evaluate the system close-loop control behaviors, a two-state skyhook controller designed for the conventional semi-active suspension is adopted for comparison purpose. In two-state skyhook control strategy,
37
the damper is controlled at a maximum or minimum damping force, which are referred to as high-state and low state damping respectively. The determination of the damping adjustment state depends on the product of the suspension relative speed and the absolute speed of the sprung mass. The skyhook controller determines the desired damping force as

From the skyhook control strategy, it can be seen that if the product is positive or zero, the damping force is adjusted to its high state; otherwise, the damping force is set to the low state. The vehicle semi-active suspension based on skyhook control strategy is often regarded as a benchmark control method and used to validate any new control strategy. Therefore, the performance of the EMPC controller and the skyhook controller toward the vehicle semi-active suspension will be compared with the passive vehicle suspension to further demonstrate the potential advantages of the system. The random road profile, which represents the major disturbance acting on the vehicle suspension, is also chosen to model the actual roughness of road surface. 38
The parameters of the EMPC controller to be tuned include the length of the prediction horizon Np, the length of the control horizon Nc and the weighting matrices
Np = 5; Nc = 4;
The damping adjustable damper characteristics are described by the force-current map shown in Figure 2. Such a map can be obtained using tests data collected for the damper model identification.
41
According to derived force-current map of the considered damper, the following passivity constraints are defined as
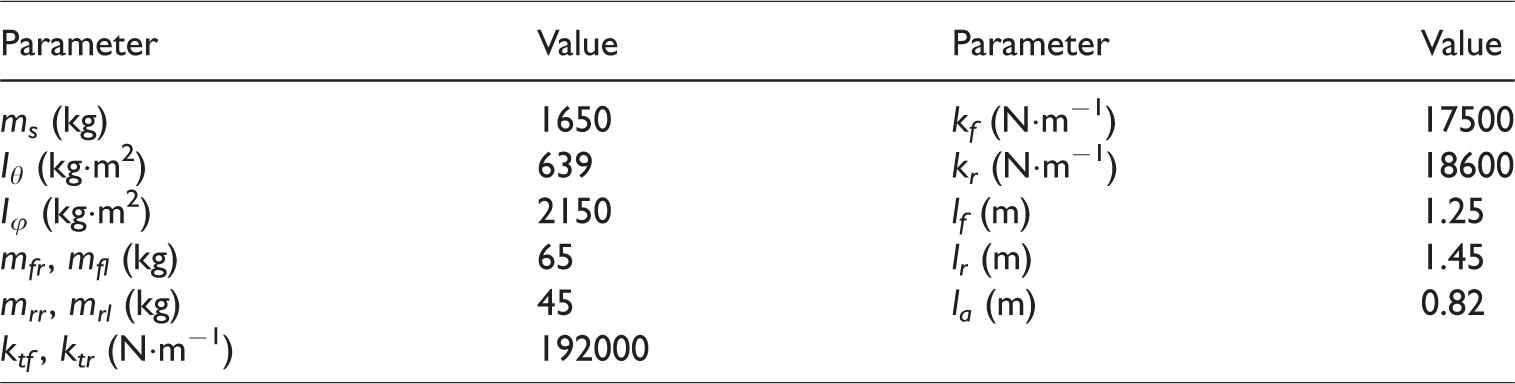
Furthermore, the physical parameters which characterize the considered vehicle are given in Table 1.
Vehicle physical parameters.
Time domain simulation analysis
The computation of the EMPC control moves is realized by using an optimized MATLAB code. The mean computation time for each control move for EMPC performed on an Intel Core i5 platform at 3.3 GHz is of about 0.35 ms, while the full MPC procedure takes about 0.15 s, which verifies the computational efficiency advantage of the proposed EMPC controller. To obtain the simulation results, we assume that the vehicle is driving on a rough road corresponding to the class B of ISO road profiles at 70 km/h. Figures 4 to 8 illustrate the simulation responses of the sprung mass acceleration, the roll angle acceleration of the vehicle body, the pitch angle acceleration of the vehicle body, the dynamic tire load of the front-right wheel and the front-right suspension deflection of the three types of suspension respectively. On this basis, the r.m.s. values of the vehicle suspension performance criteria are also listed in Table 2.
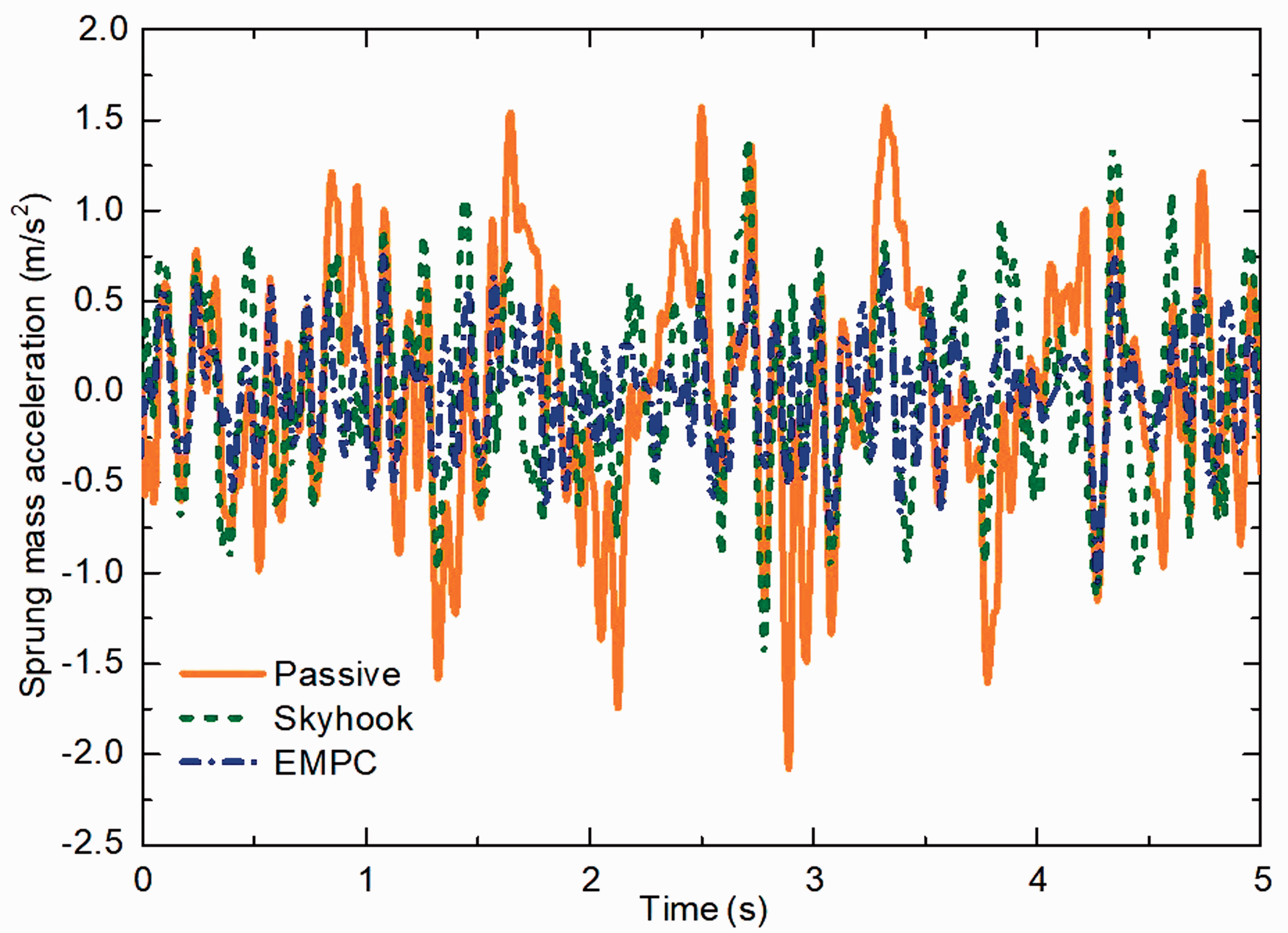
Time responses of the sprung mass acceleration under random road input.
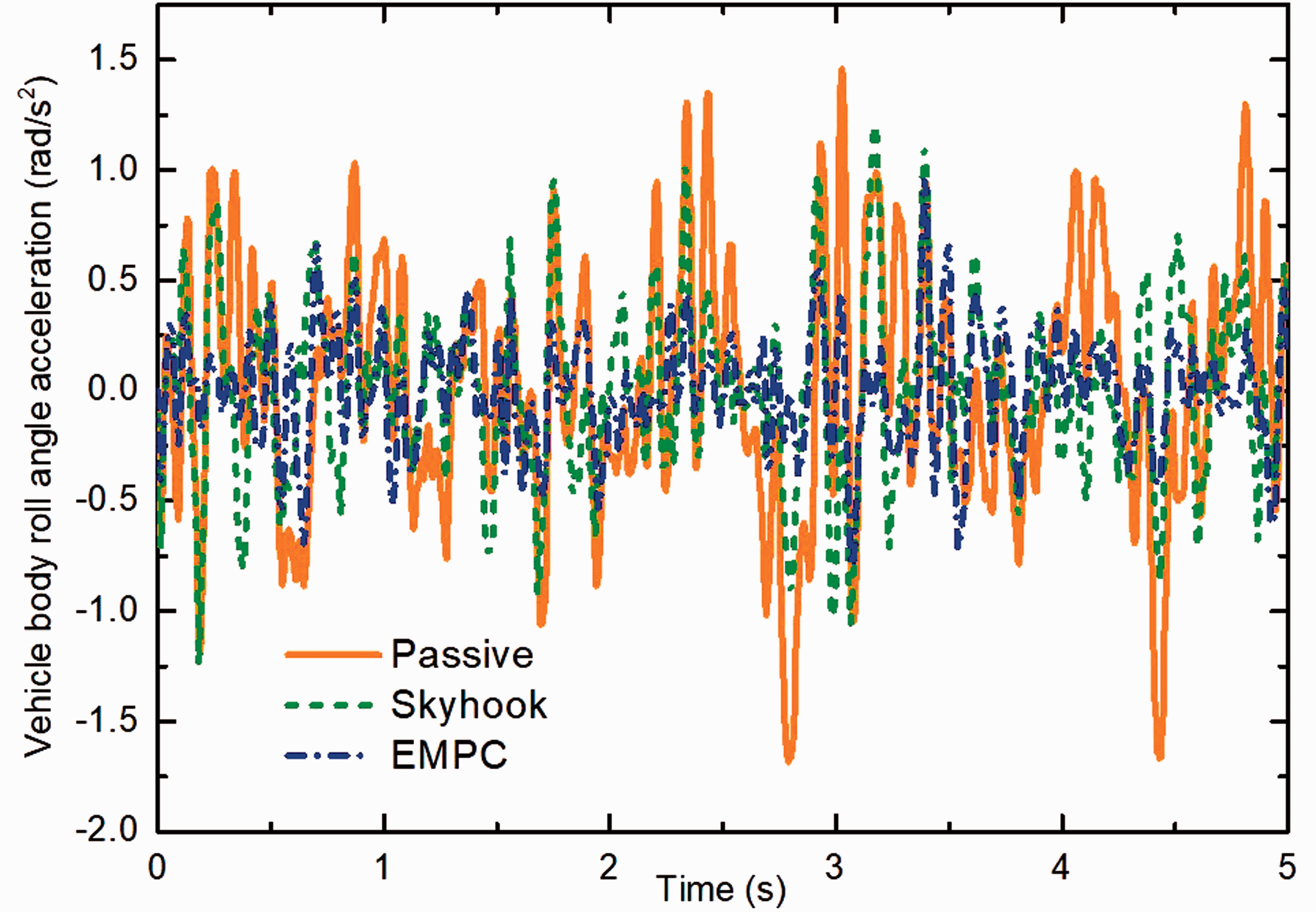
Time responses of the roll angle acceleration.
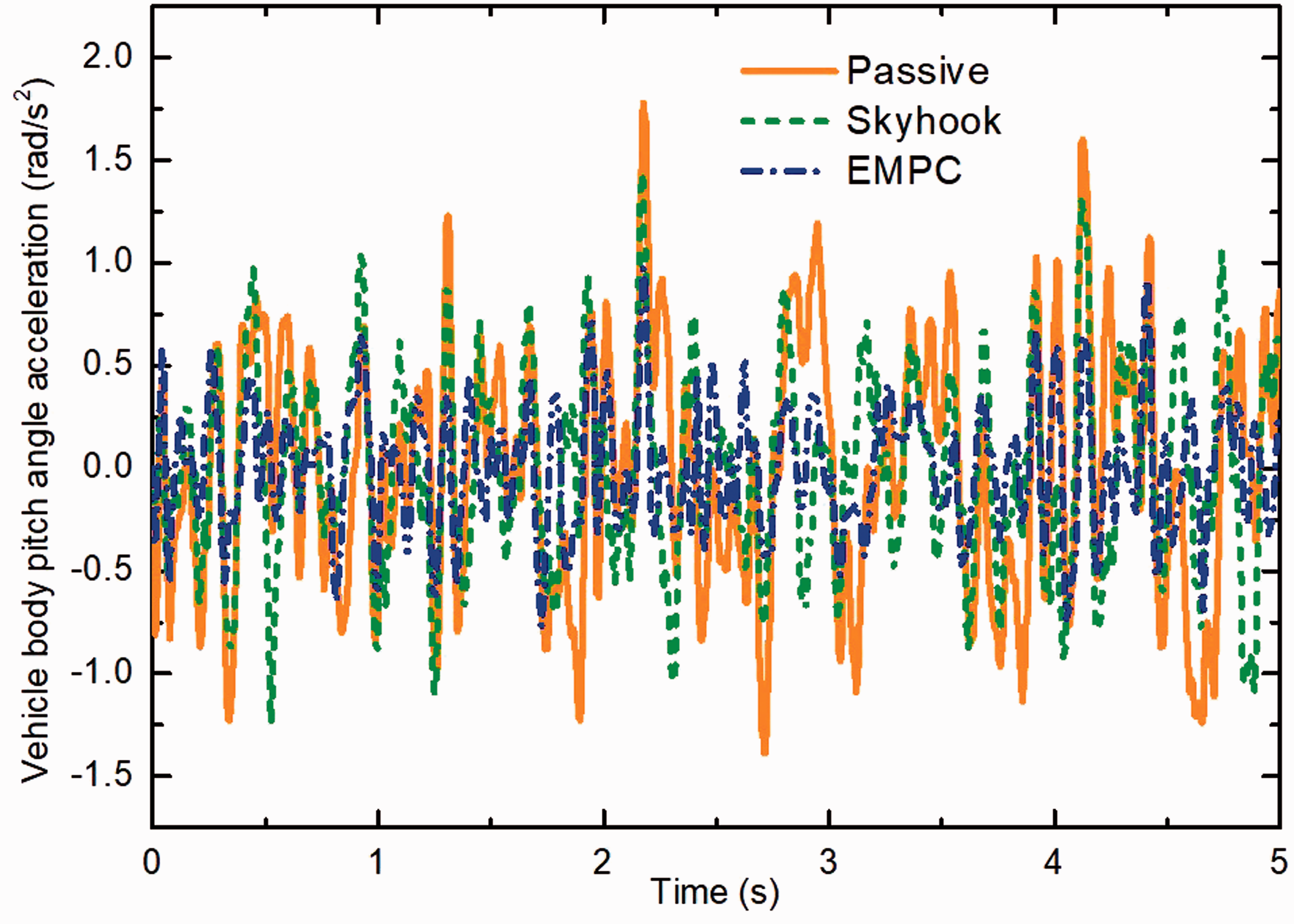
Time responses of the pitch angle acceleration.
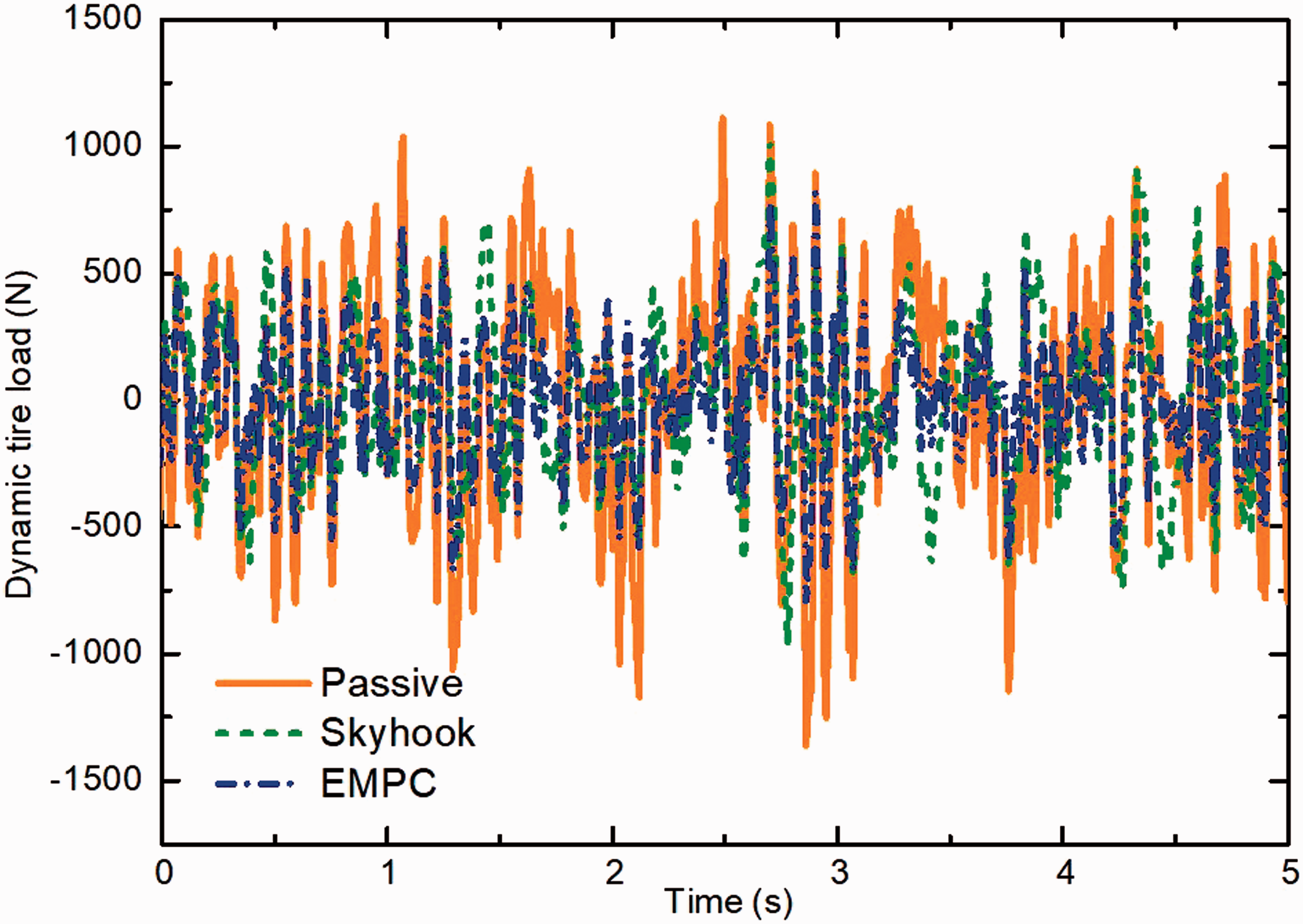
Time responses of the dynamic tire load.
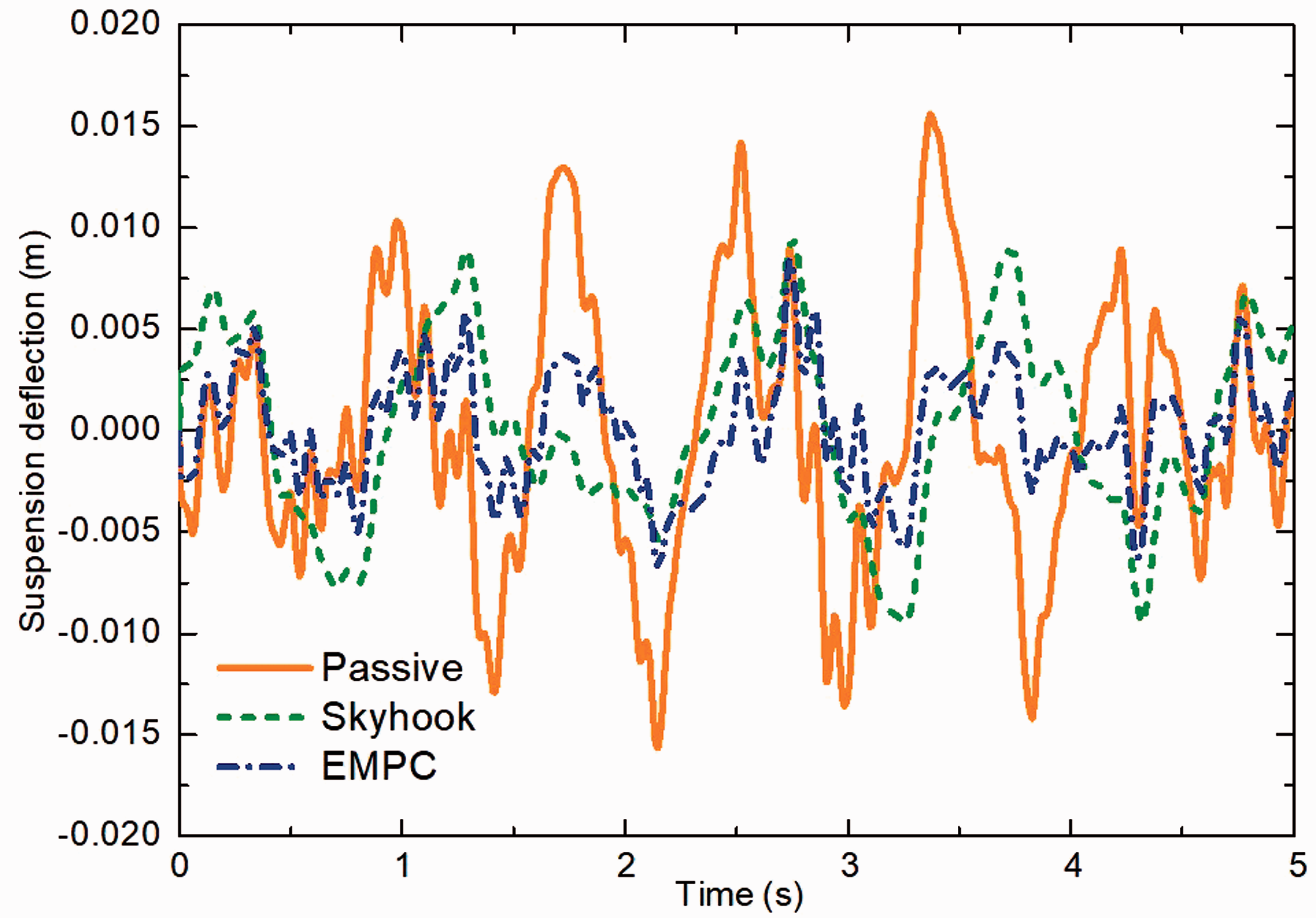
Time responses of the suspension deflection.
Comparison of r.m.s. values of the vehicle suspension performance criteria.

As shown in Figures 4 to 8 and Table 2, it can be concluded that the designed EMPC controller is effective in improving the performance of the vehicle semi-active suspension. In particular, the suspension controlled by EMPC can reduce the r.m.s. values of the sprung mass vertical acceleration, the roll angle acceleration of the vehicle body, the pitch angle acceleration of the vehicle body, the dynamic tire load of the front-right wheel and the front-right suspension deflection by 37.89%, 31.77%, 39.18%, 52.88% and 30.5%, respectively, compared with the conventional passive suspension. These improvement amplitudes are significantly larger than that of the semi-active suspension controlled by a skyhook controller, which verifies that better performance of the vehicle semi-active suspension can be achieved by the proposed EMPC approach.
Frequency domain simulation analysis
To further validate the performance of the proposed EMPC control method, Figures 9 to 12 illustrate the frequency responses of the sprung mass acceleration, the roll angle acceleration of the vehicle body, the dynamic tire load of the front-right wheel and the front-right suspension deflection of the three types of suspension respectively. As shown in these figures, the designed EMPC controller can also improve the performance of the vehicle semi-active suspension in frequency domain. In particular, the suspension controlled by EMPC can reduce the sprung mass vertical acceleration in low frequency region, which is just the sensitive vibration area of human body. The peak values of the frequency responses of the other suspension performance indices are also reduced significantly by the EMPC controller. Similarly, these improvement amplitudes are larger than that of the vehicle semi-active suspension controlled by a skyhook controller.
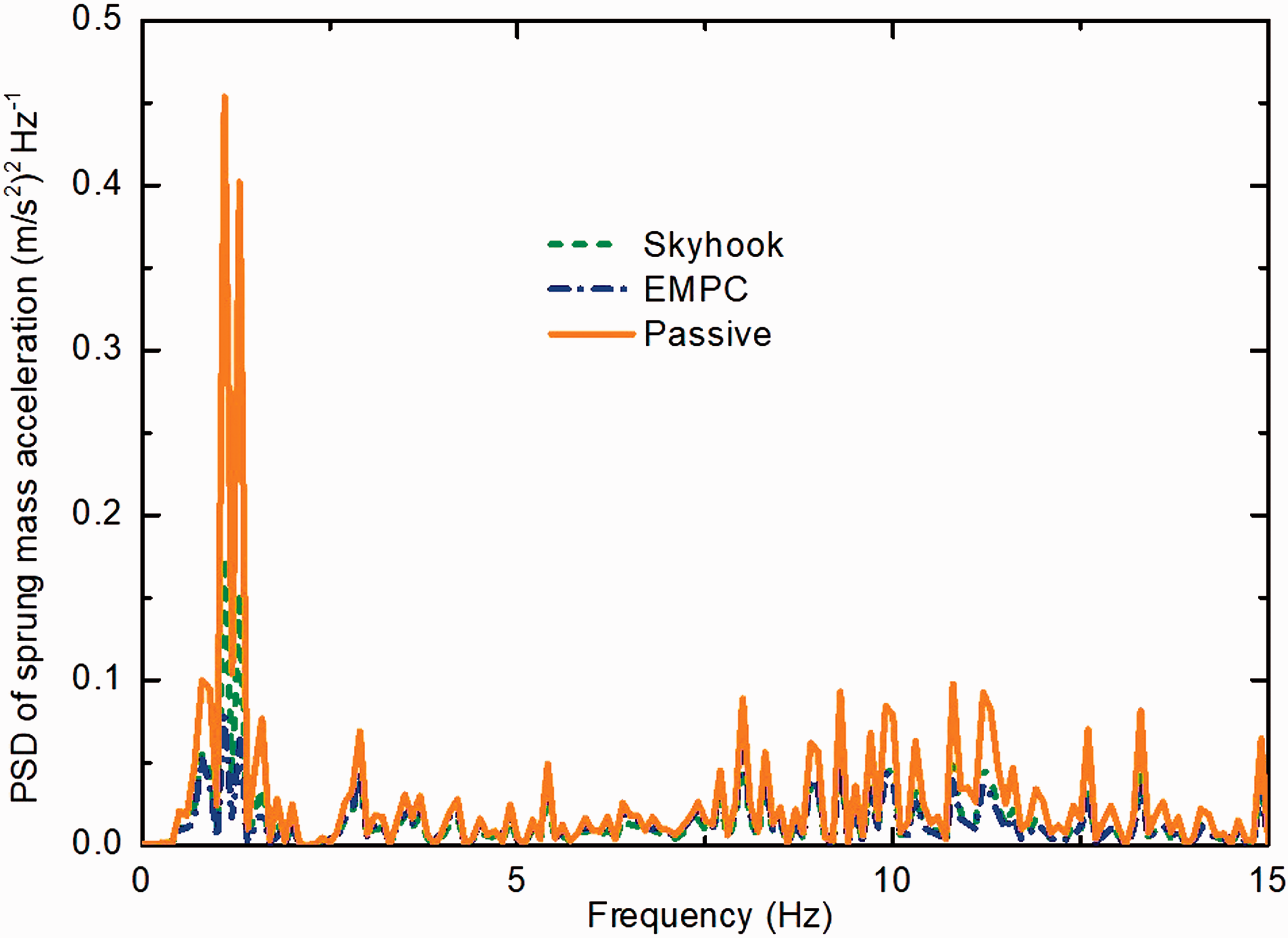
Frequency responses of the sprung mass acceleration.
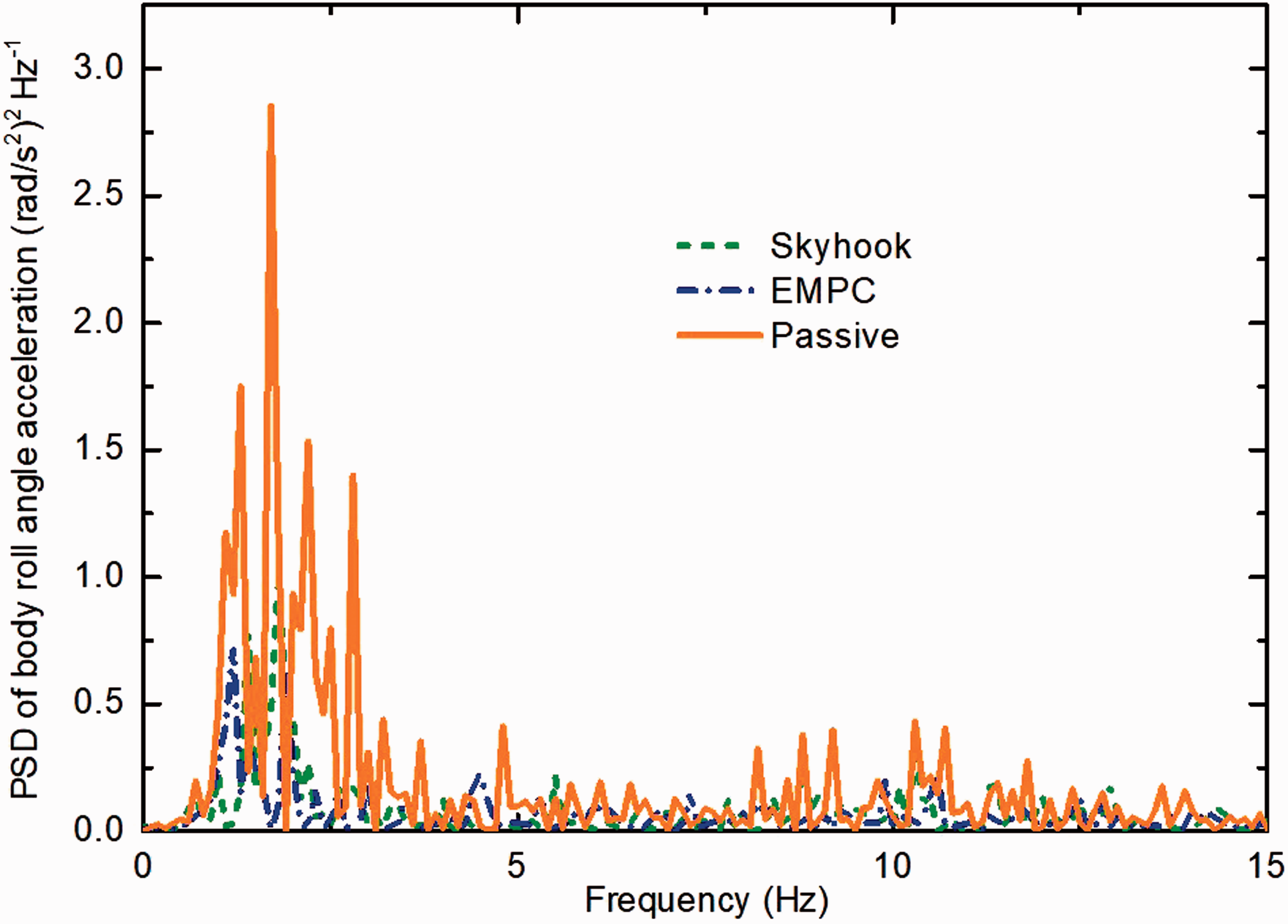
Frequency responses of the roll angle acceleration.
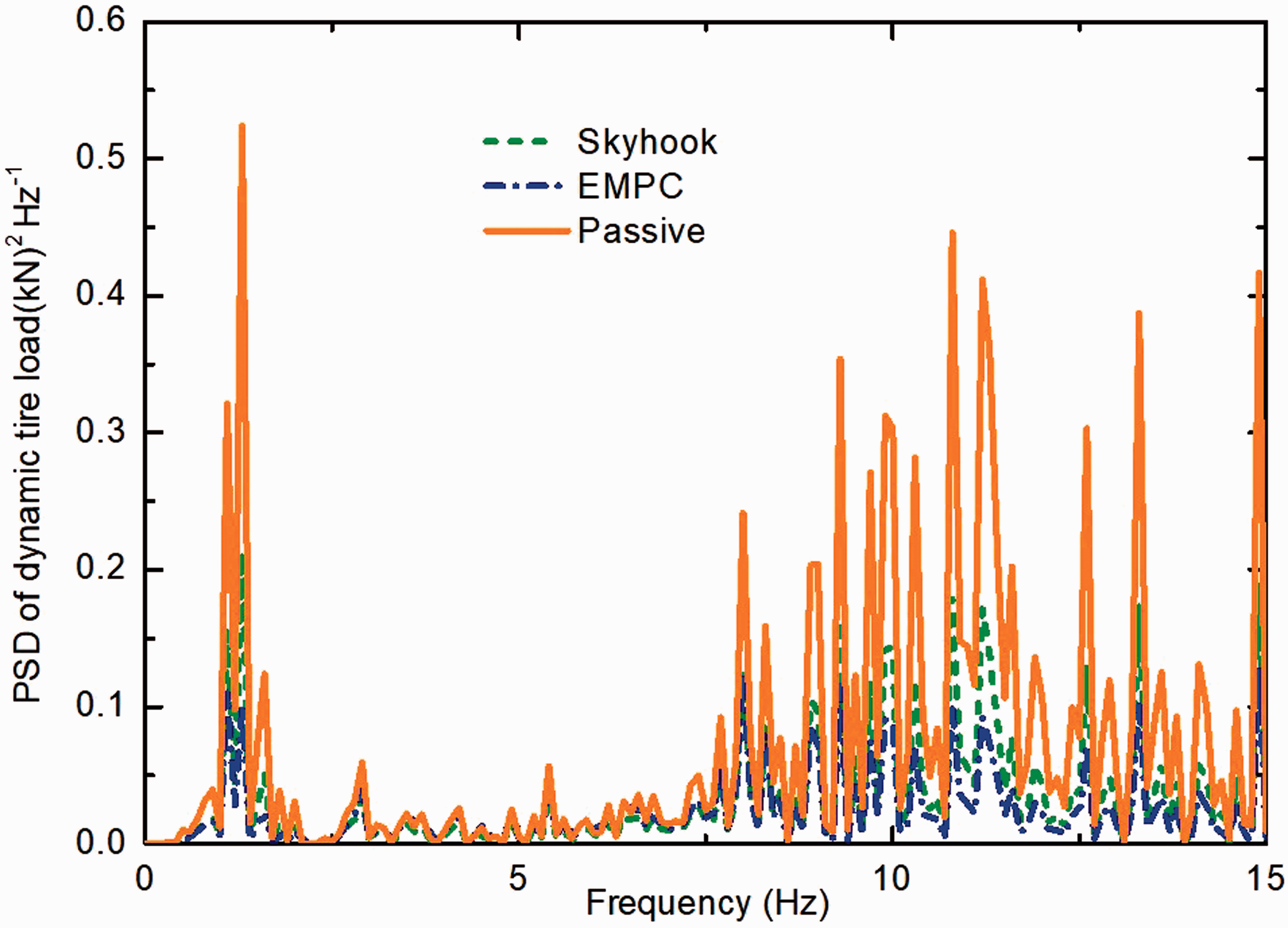
Frequency responses of the dynamic tire load.
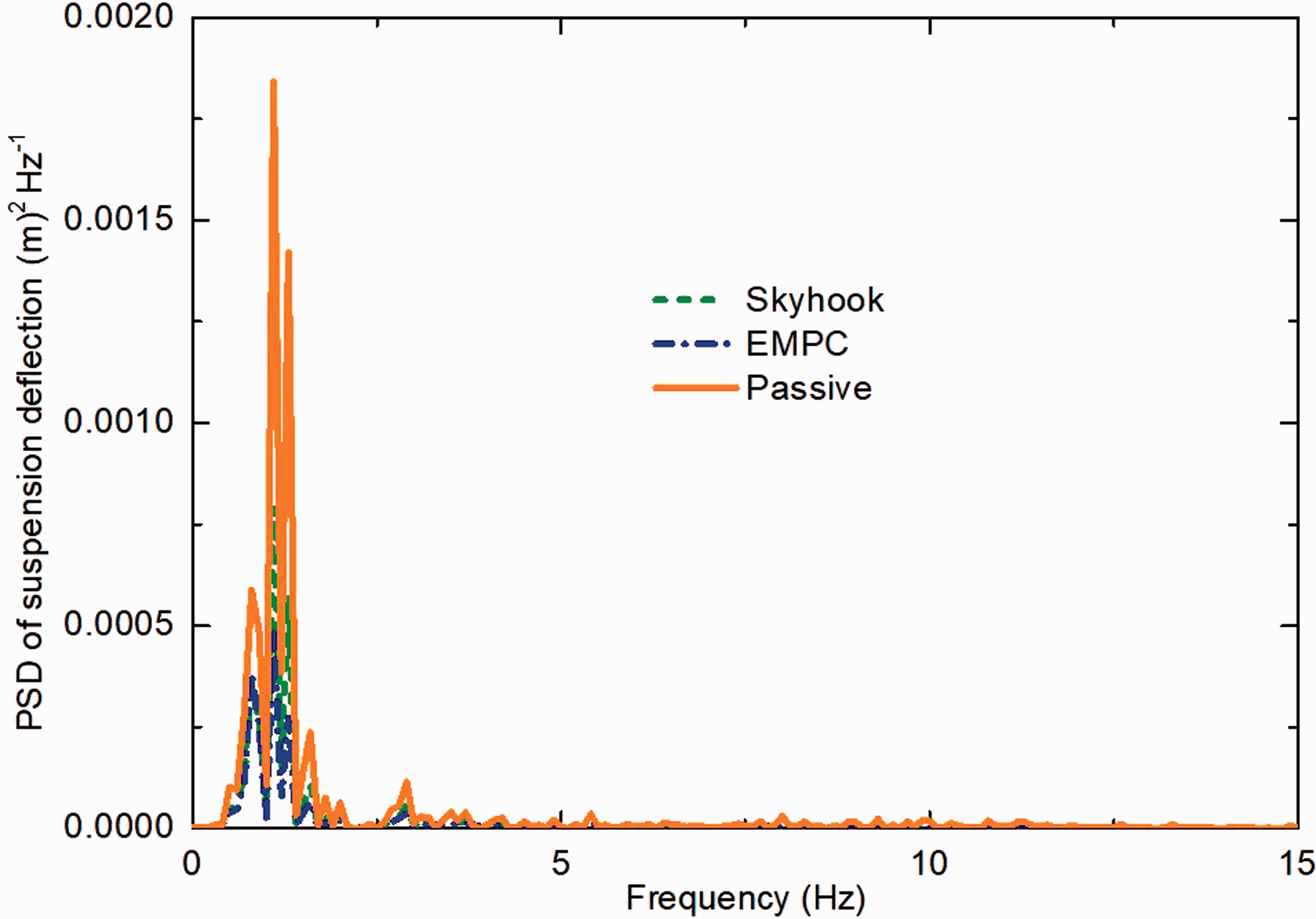
Frequency responses of the suspension deflection.
Conclusion
In this work, an EMPC controller is designed for the vehicle semi-active suspension to cope with strong couplings, actuator constraints and fast dynamics of the system. Compared with traditional MPC, the EMPC requires low computation time while maintaining identical performance as MPC. The state-space model of the full-car semi-active suspension system, which considers the passivity constraints of the adjustable damping force, is established, and an augmented EMPC controller is then formulated by using MPT. Simulation results show that the proposed EMPC approach demonstrates significant performance improvement for the vehicle semi-active suspension, as well as low computation requirement.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is supported by the National Natural Science Foundation of China under grant 51705207, 51605195; the China Postdoctoral Science Foundation under grant 2017M611728; the Postdoctoral Research Foundation of Jiangsu Province under grant 1701112B; the Six Talent Peaks Project of Jiangsu Province under grant JXQC-042; and the Primary Research and Development Plan of Jiangsu Province under grant BE2017129.