
Abstract
Permanent magnet synchronous motors (PMSMs) have been broadly applied in servo-drive applications. It is necessary to improve the performance of PMSM. An explicit controller designed for PMSM based on multi-point linearization is proposed to reduce the linearized model error caused by different running status of PMSM. The mathematical model of PMSM system in the synchronous rotating frame and the problem formulation are introduced at first. Then, the preliminaries about explicit model predictive control (MPC) algorithm are presented in this article. Based on this, the multi-point linearization model is created for explicit MPC controller design. Moreover, the block diagram of the proposed method for PMSM system is presented. Finally, the simulation results are provided to demonstrate that the proposed explicit MPC controller based on multi-point linearization achieves better performance than that based on traditional single-point linearization, but requires the same online computation time because of the offline optimization of explicit MPC.
Keywords
Introduction
In recent decades, permanent magnet synchronous motors (PMSMs) have played a significant role in motion control applications, including electric vehicles such as Toyota Prius, BYD, Nissa Leaf, and so on (Lara et al., 2016; Mwasilu et al., 2016; Sreejith and Singh, 2019; Velagić and Šabić, 2014; Zanma et al., 2020). This is mainly because PMSMs have various advantages like high-power density, high efficiency, high torque-current ratio, and compact structure (Koiwa et al., 2019; Zhang et al., 2019). Traditionally, the proportional integral (PI) (Jung et al., 2014; Yi et al., 2017) control has been applied in PMSM drives to obtain fast four-quadrant operation and smooth starting of the system. With the development of the computing hardware, a number of advanced control algorithms have emerged to obtain reduced torque ripple, improved efficiency and insensitivity to parameter changes but at the expense of high online computational complexity. The popular algorithms are fuzzy control, sliding mode control, adaptive control, neural network inverse method as well as model predictive control (MPC) (Liu et al., 2019; Mani et al., 2018; Sun et al., 2020; Wang et al., 2019; Wu et al., 2020). Among these approaches, MPC is proposed as an alternative control method for PMSM system due to its fast dynamic performance and multivariable constraint control capability (Ganapathy and Santha, 2019). MPC can predict and determine the future voltage vector to achieve the optimization of the cost function. The results are assessed by using the cost function penalizing the deviation from a given set point value to a hard constraint (Zhu et al., 2020). MPC transforms the control problem into an optimization problem, which provides great convenience for dealing with constraints and nonlinear models. The optimal control problem is solved at each sampling moment to obtain the control action sequence. The asymptotic stability and the optimality of constrained MPC are discussed in Mayne et al. (2000). The main outstanding advantage of MPC over other methods is that the security and physical limitations of the motor system can be directly incorporated into the formulation of control problems as control objectives (Jia et al., 2019). Therefore, the future constraint violations are preventable.
However, one nonnegligible drawback of MPC is that the real-time implementation of MPC involves high computational complexity resulted by the optimization process at each sampling time. In order to reduce online computational burden, Bemporad et al. (2002) proposed an explicit solution to the optimization problem, which is known as explicit MPC. Explicit MPC can gain the same performance as MPC including the stability of the system. It transfers the optimization problem from online to offline so as to reduce the online computation time. The explicit control law are represented by continuous piecewise affine (PWA) functions. The online computation is only about simple lookup table to confirm the partition of the state variables, which considerably reduces the online computation time. This means that explicit MPC is certainly suitable for fast sampling systems like PMSM system. The design and validation of explicit MPC for PMSM was presented in Cychowski et al. (2005), demonstrating that the resulting controller achieves the same level of performance as conventional MPC but requires much less online computation time. A PMSM control method (Mynar et al., 2016) was developed based on explicit MPC using a novel linearization and constraint handling method, which allowed natural field weakening. It also added an extra compensation voltage calculation to the controller output to remove the inaccuracy introduced by the model linearization process.
Unfortunately, there are limitations on using MPC. It is generally known that the performance of MPC remains heavily dependent on the precision of the model. The linearized model error caused by different running status can lead to poor performance. This indicates that a single linear model is not able to obtain good control performance for this system. Therefore, based on explicit MPC, we propose a multi-point linearization method to linearize the PMSM model at a few operating points to cover the wide operating range. Because of its offline optimization, the online computational burden cannot be increased by using muilti-point linearization method. Compared with the single-point linearization method, the dynamic and steady-state performance of the system has been improved when the working condition of the motor changes. The simulation results indicate the effectiveness of the proposed approach.
The structure of this article is arranged as follows. Firstly, the mathematical model of PMSM and the brief account of the existed problem are described. Then, the preliminaries of explicit MPC are reviewed. Subsequently, the proposed algorithm including the multi-point linearization method, model selection and model switching schedule, and the controller design are presented. The next section depicts the simulation results and a comparative method to prove the effectiveness of this approach. Finally, the last section gives conclusions of this proposed method.
PMSM mathematical model
PMSM is a complex nonlinear system. In order to better design advanced PMSM control algorithm, it is important to establish an appropriate mathematical model. The

The relation between rotor mechanical

which is regarded as the motion equation of PMSM. In this equation,
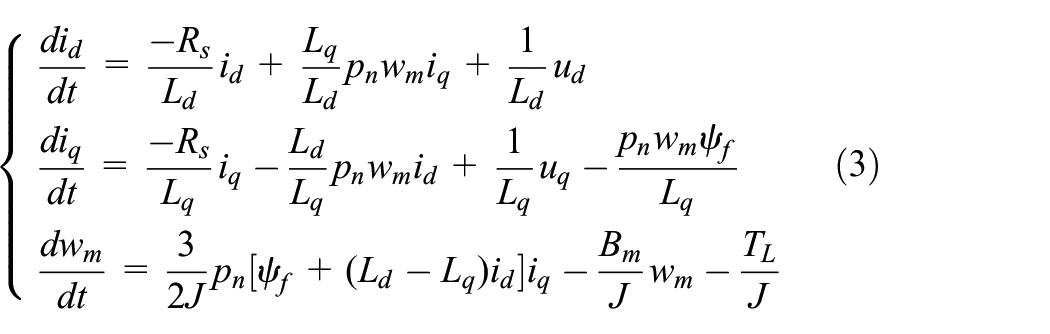
If the state variable is defined as

System (4) may be discretized using, for example, Euler or Runge-Kutta methods to obtain a discrete-time description of the system. We denote the discrete-time expression of the model as follows

PMSM is usually controlled by the

where
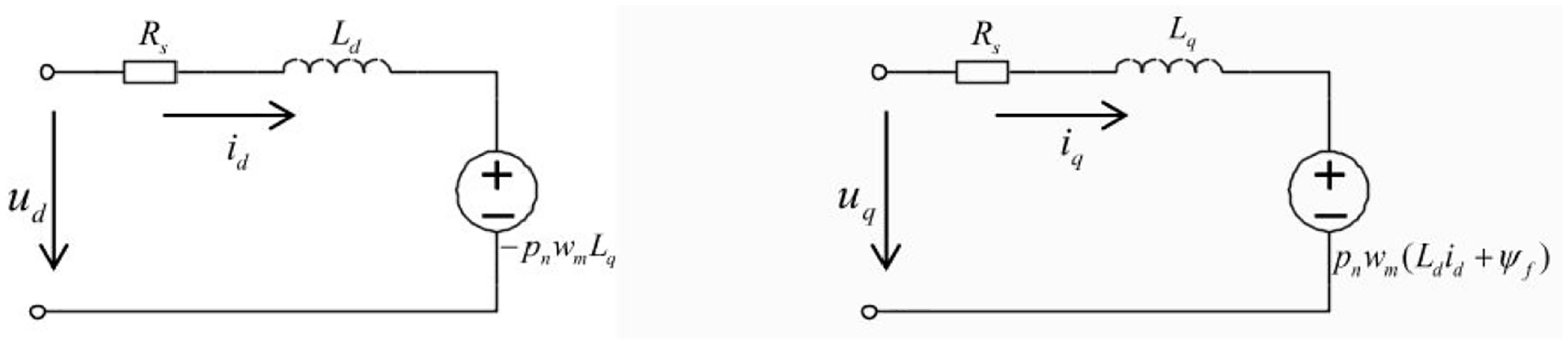
Equivalent circuit of a PMSM.
Explicit MPC
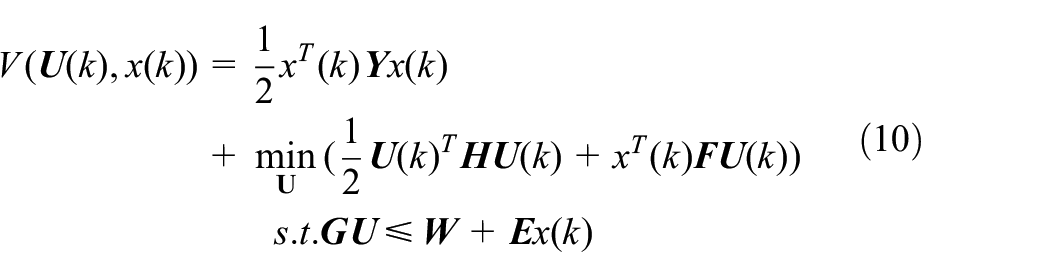
Before designing the controller, we review the fundamentals of explicit MPC and present the explicit law of control variables in this section. For a linear time-invariant system with

where
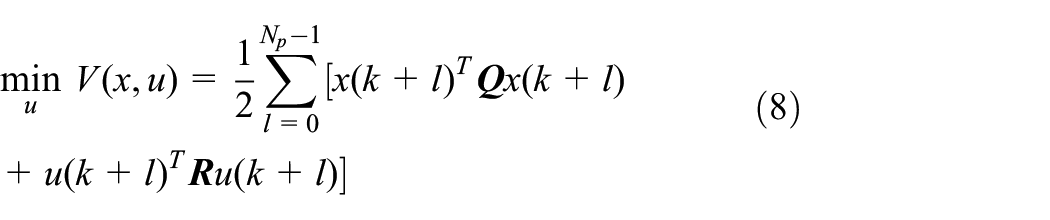
where
The prediction model used to compute the future state trajectories is as follows

where
where

where
The mp-QP problem of equation (11) can be dealt with using the first-order Karush-Kuhn-Tucker(KKT) optimality conditions (Bemporad and Morari, 1999)




where the index

Substitute the result into equation (13) to achieve the complementary slackness condition, which is

where

Obviously,

Moreover, the Lagrange multipliers in (17) should satisfy (14)

The inequalities (19) and (20) describe a polyhedron in the state space, which is regarded as the critical region

Obviously, the controller is a linear continuous PWA function of state vector. Therefore, the online computation is only about searching in a lookup table to find the region where the current state
Proposed controller based on multi-point linearization
In this section, the proposed explicit controller base on multi-point linearization is introduced. The definition of multi-point linearization, model selection and model switching schedule, and specific controller design are demonstrated successively.
Multi-point linearization
The operating conditions of a PMSM vary significantly. This renders the operating range of a PMSM large. A single linear model is not sufficient to achieve good control performance. We may linearize the model at a few operating points to cover the wide operating range. These different operating conditions mainly contain the changes of tracking speed and load torque. In this work, we consider that the motor has
Multi-point linearization modeling means that the PMSM model is linearized at a few steady state points. In other words, the PMSM model is a linear time-varying model after multi-point linearization. For explicit MPC, this method just increases offline computation time other than online computation time, which means this approach will not increase the online computational burden. The number of the linearization times is determined by the number of the stable operating points required by the PMSM system. Let us consider that there are
Then, the combination of the linearized models is
where
Equation (24) is the linear time-varying model after multi-point linearization. The matrices
Model selection and model switching schedule
The key point of model selection is to choose appropriate working points to linearize the original model. In this work, we assume that the information about the working condition change is known before the selection of operating points. Three different kinds of working conditions of PMSM are discussed. The selection of the linearization points for these three conditions are shown in Figure 2(a), (b), (c). Here,
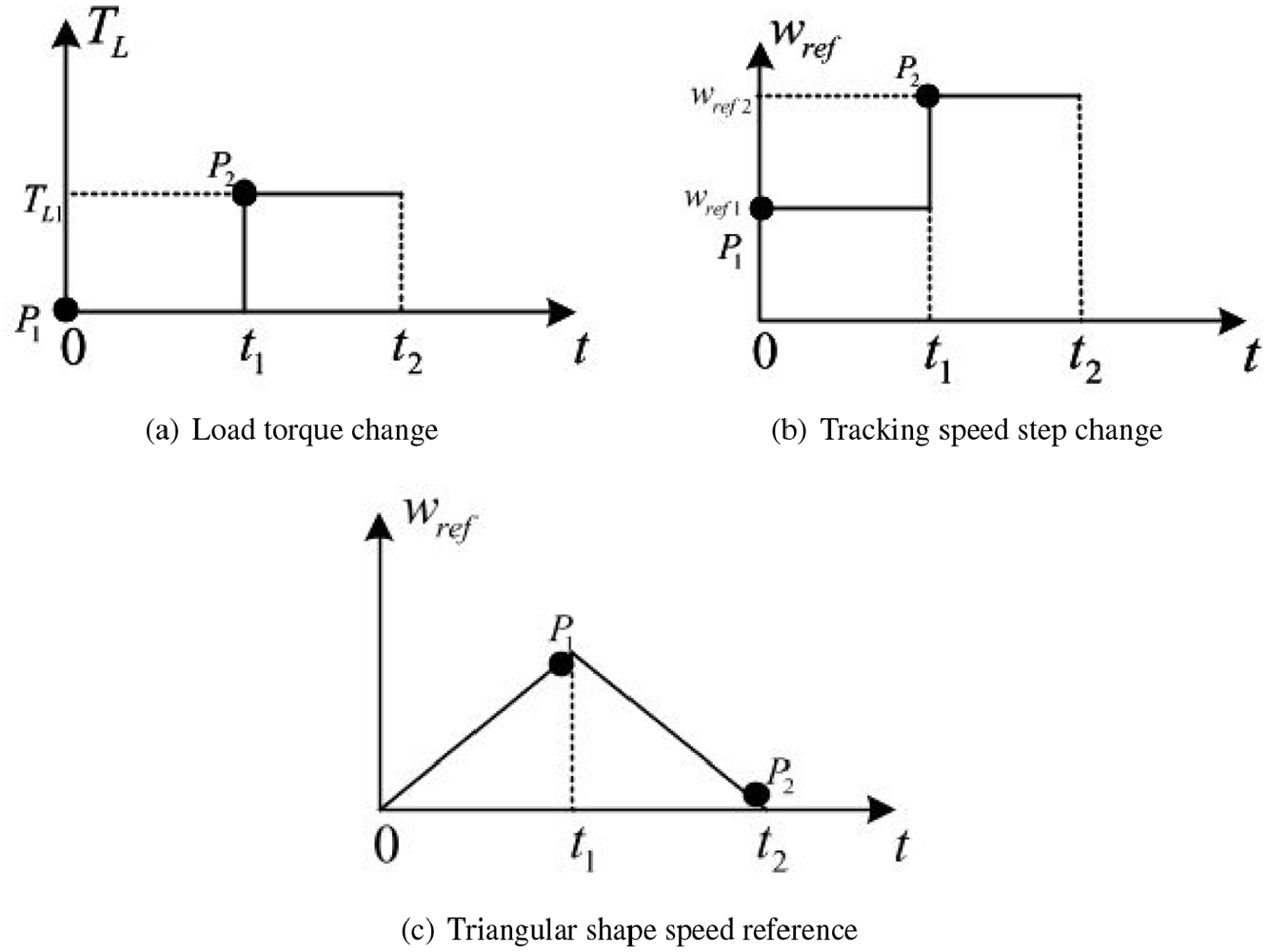
Selection of the linearization points for three different working conditions.
How to switch between these

when the motor is running in the
Controller design
We assume that the motor is working in the
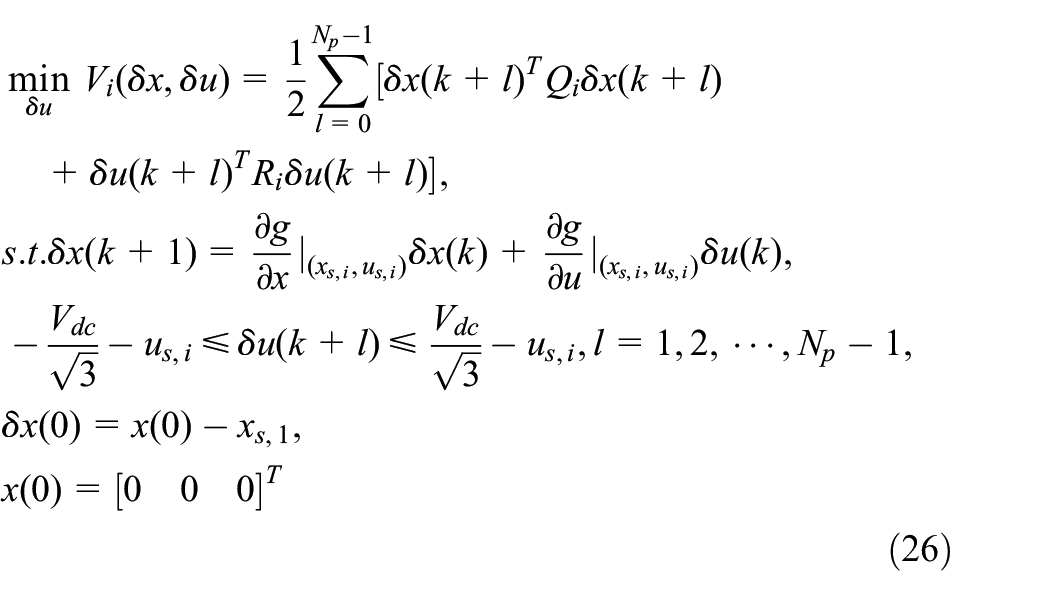
where
The block diagram of the PMSM system is shown in Figure 3. The offline part is completed by MPT3.0 toolbox, which obtains the partition of the state variables and the corresponding explicit control laws of inputs. The offline calculation process mainly includes initialization and optimization. To be specific, the linear discrete model is regarded as the input of MPT3.0 toolbox at first. Then according to the requirements of the system, the constraints of the model are provided. Next, the system model and the presented constraints are utilized to realize the optimization calculation of MPC. Finally, the partition of the state variables and the PWA functions are generated and saved in a lookup table.
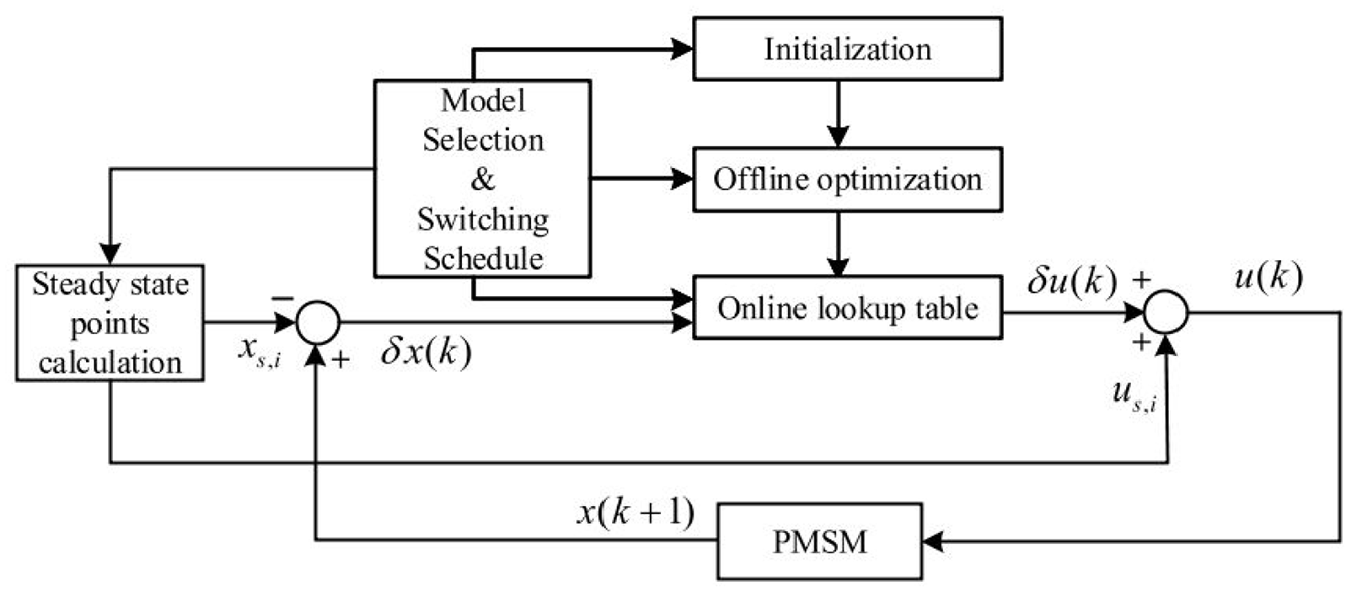
Block diagram of the PMSM system.
The online sequential search in a lookup table is the controller execution part. At time
Simulation results
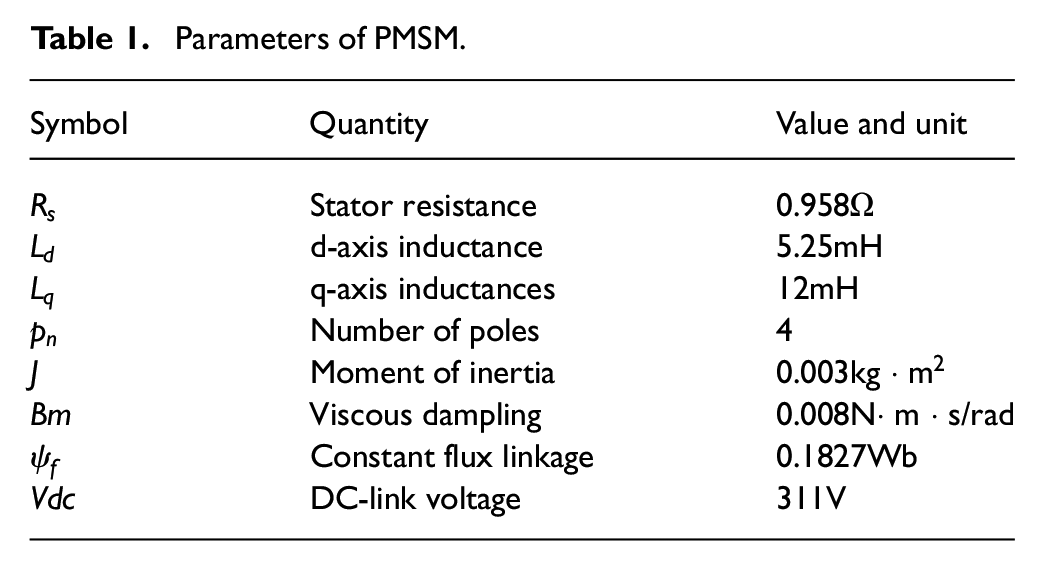
In this section, we apply the proposed approach to a PMSM system to illustrate its applicability and effectiveness. The model of PMSM has been introduced above and the detailed parameters used in this section are displayed in Table 1.
Parameters of PMSM.
Three different working conditions discussed in the previous section are adopted in the following simulations, including load torque change, tracking speed step change and tracking speed uniformly accelerated change. Case 1 simulates the working status that load torque grows from
The simulation results of the three cases are shown in Figure 4, 5, and 6, respectively, where speed,
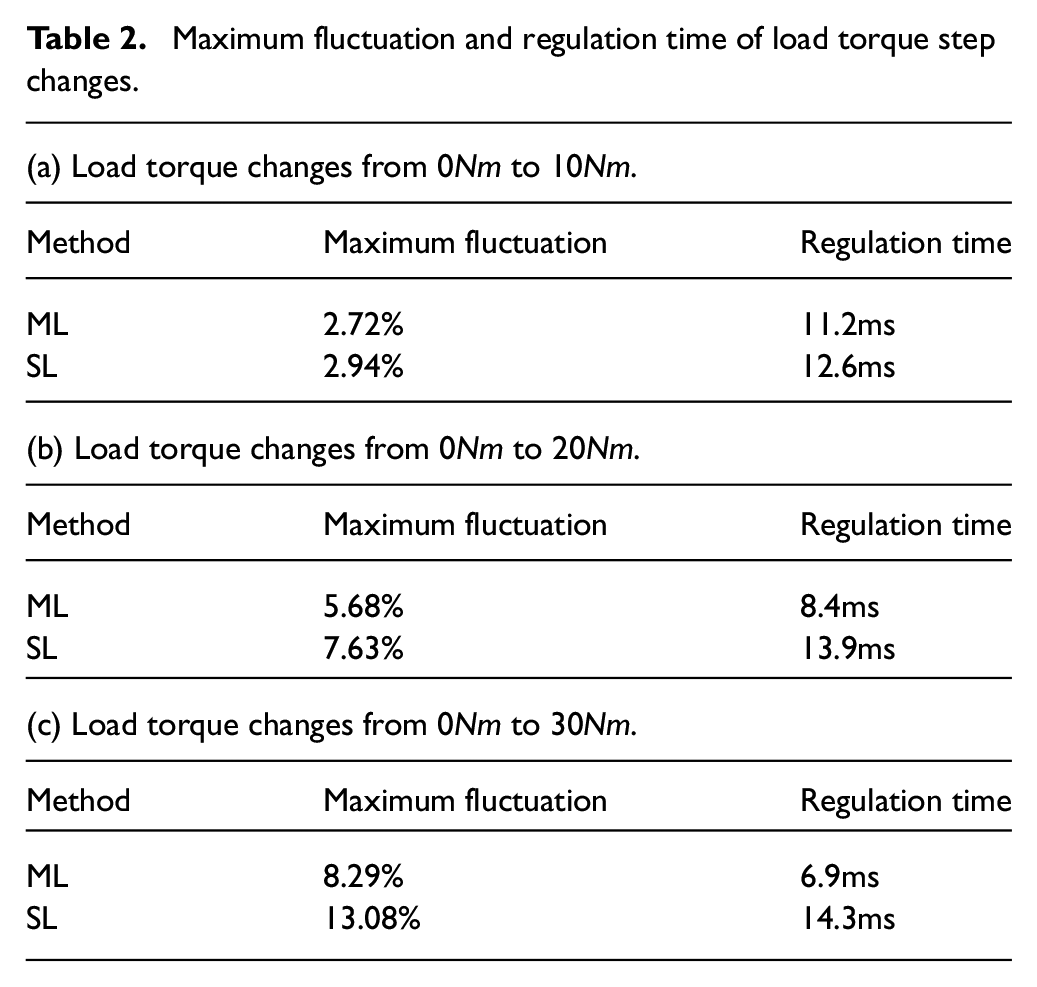
Maximum fluctuation and regulation time of load torque step changes.
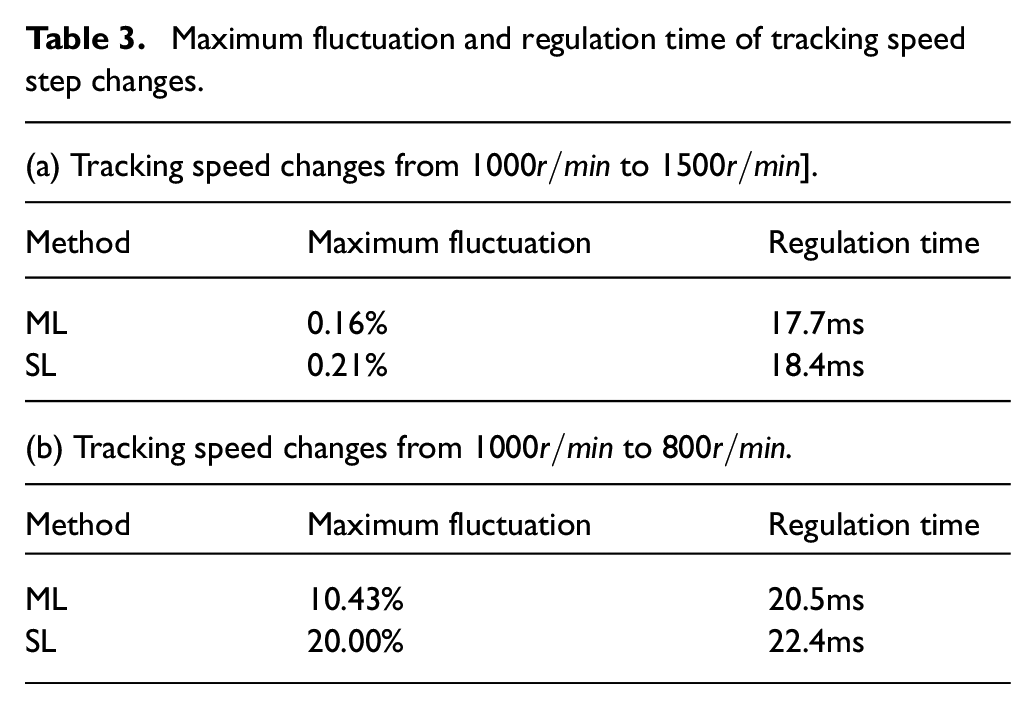
Maximum fluctuation and regulation time of tracking speed step changes.
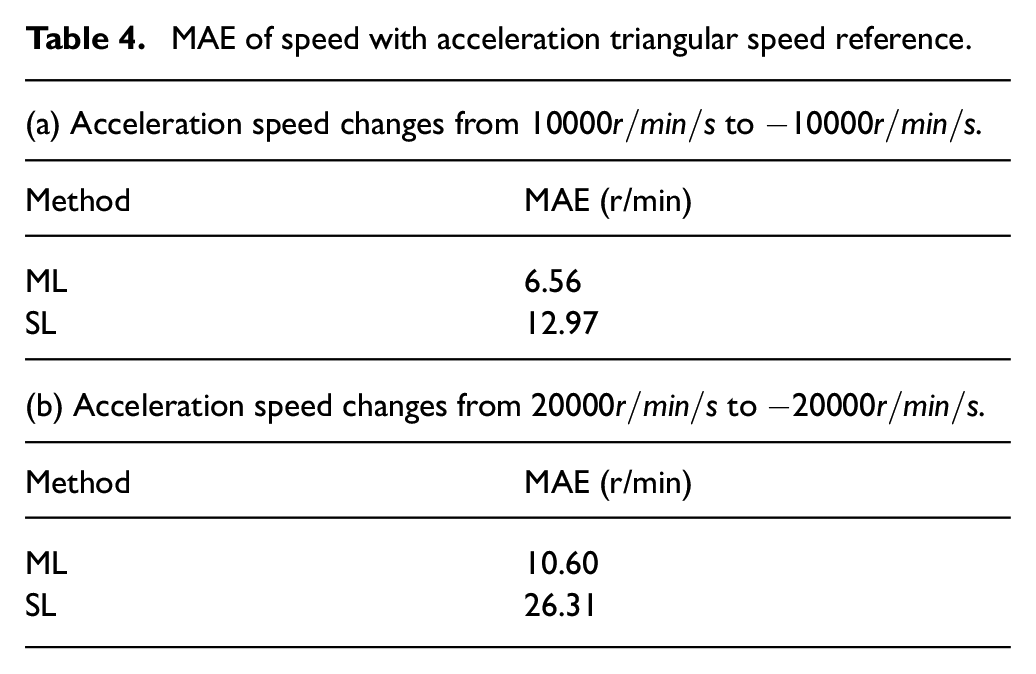
MAE of speed with acceleration triangular speed reference.
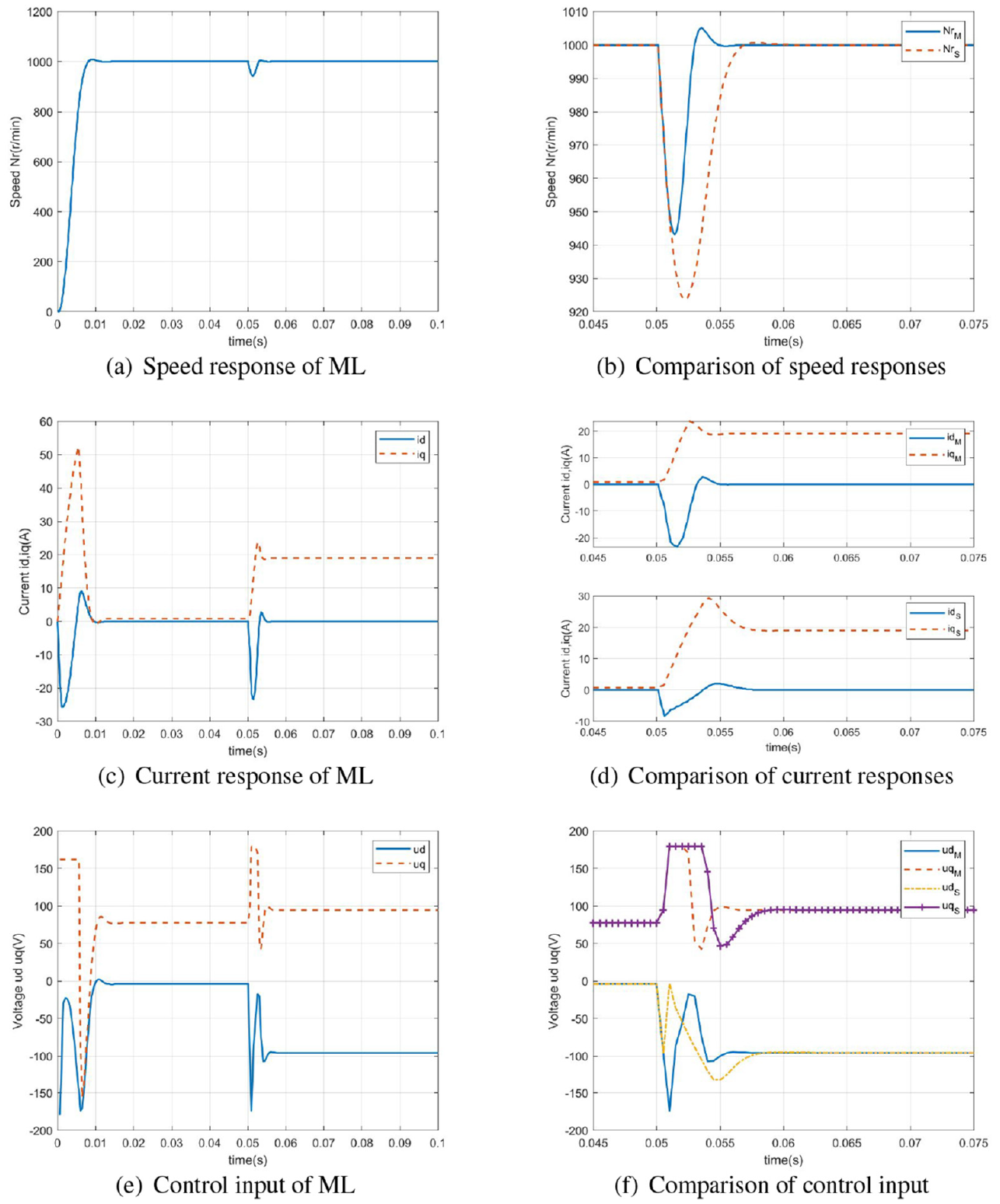
Results of case 1: Load torque changes from
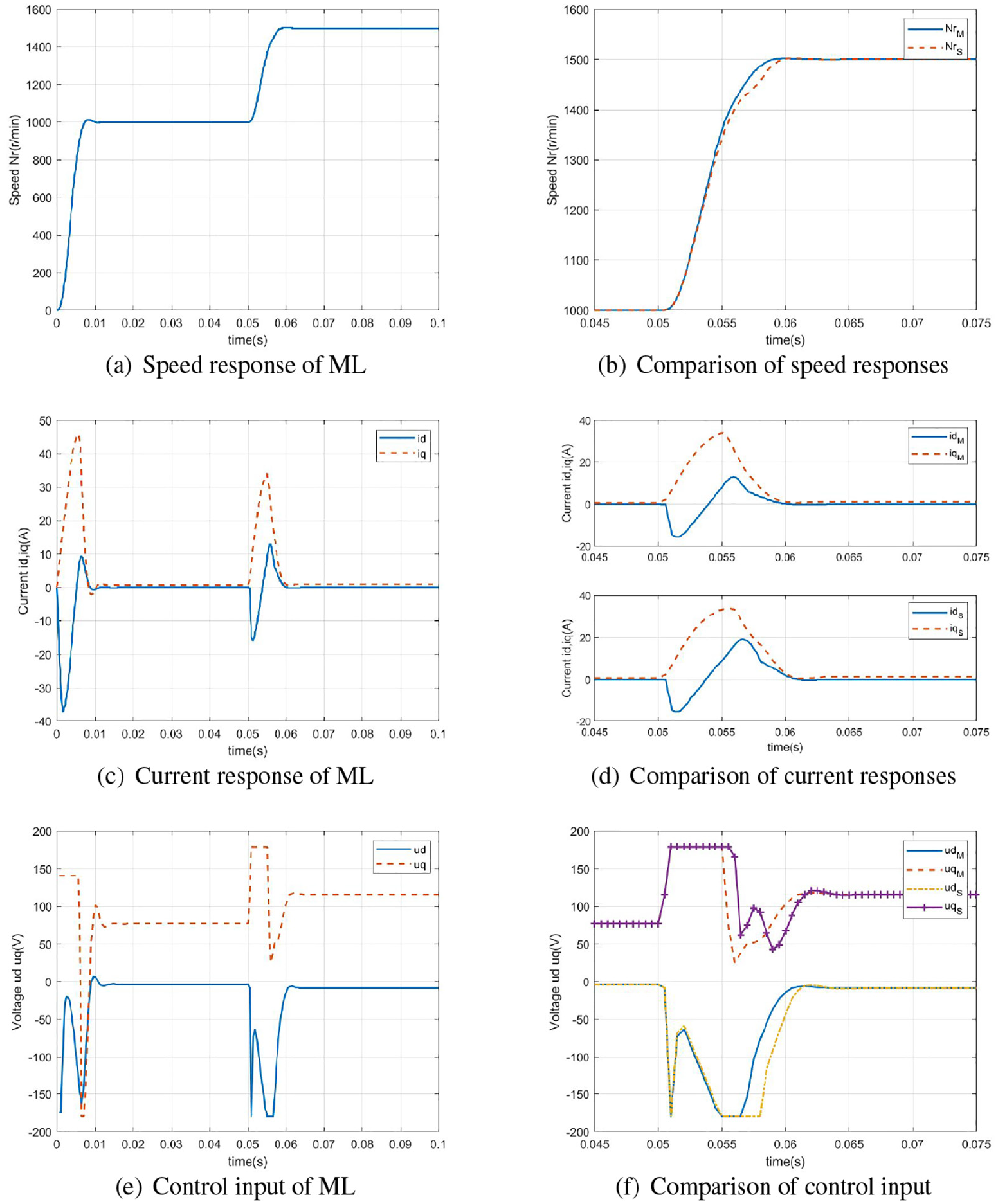
Results of case 2: Tracking speed changes from
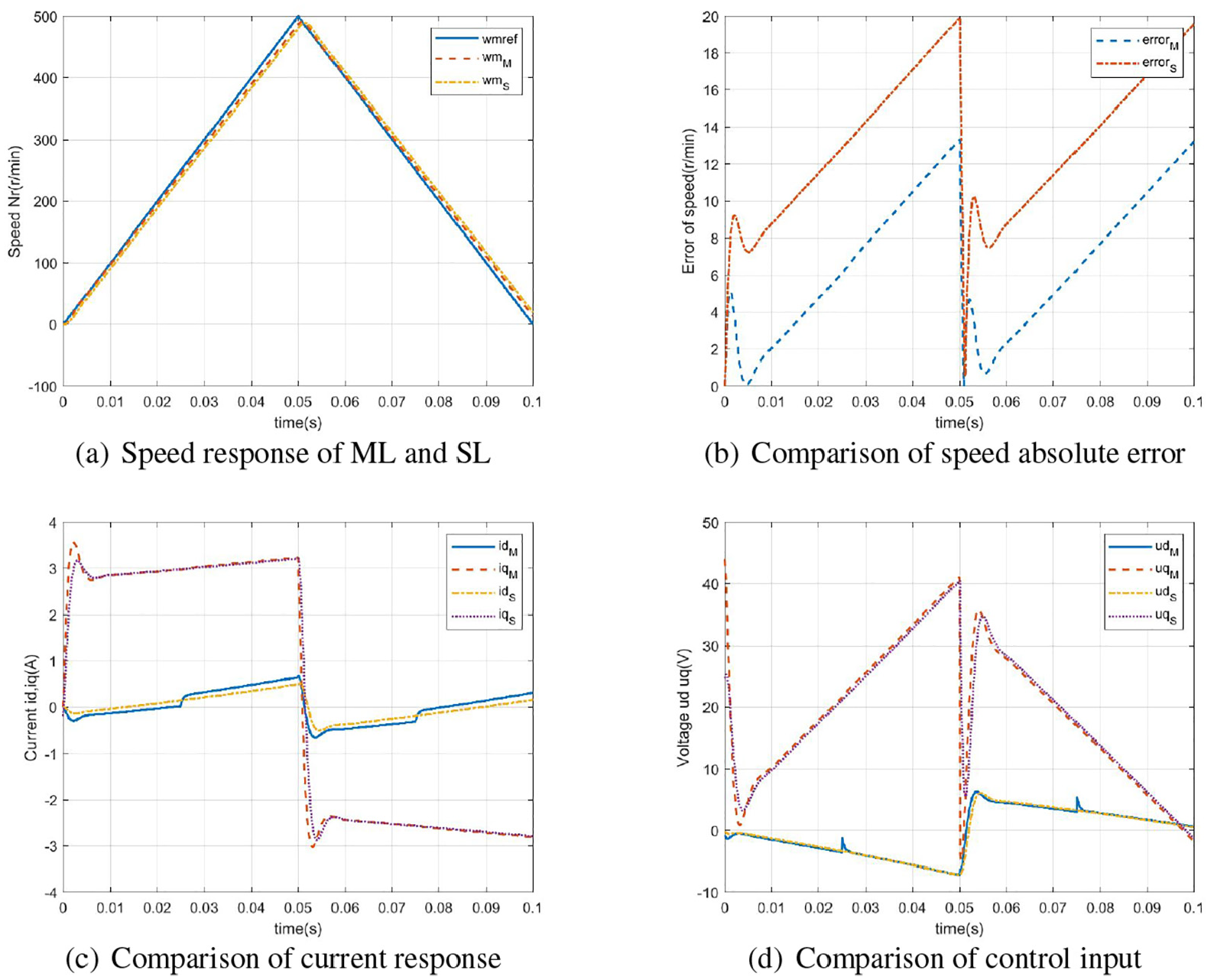
Results of case 3: Tracking speed with acceleration triangular reference.
From Figure 4, it is obvious that the proposed method can improve the performance of PMSM compared with single-point linearization model method when load torque changes from
Furthermore, the results of step change of tracking speed changes are displayed in Figure 5. The proposed controller can track the changes of the reference speed more quickly than the controller using single-point linearization although the current contrast is not that obvious. The data from Table 3(a) clarify that using the proposed approach has
Finally, Figure 6 demonstrates the results of acceleration triangular speed reference. It can be seen from the speed error curve that the speed error using proposed approach is significantly less than that using single-point linearization model. The MAE of these two methods are depicted in Table 4, which provides further evidence that the presented controller has better performance. Besides, the higher the acceleration is, the more the performance is improved compared with the single-point linearization method.
Conclusions
This study focuses on the design and validation of explicit MPC of PMSM based on multi-point linearization. The proposed approach reduces the model error caused by the change of motor operating conditions, demonstrating the potential for enhancing the performance of PMSM system. The simulation results of three given different running conditions proved that the proposed explicit controller based on multi-point linearization can obtain better speed and current performance than that based on single-point linearization without increasing online computational burden. In the future, the differences of mutual inductance between the windings caused by the change of motor position would be considered because the parameter mismatch will cause the deterioration of the performance of MPC. We intend to develop a new explicit controller based on this parameter-varying PMSM system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China under Grant 61873113, the Postgraduate Research and Practice Innovation Program of Jiangsu Province under Grant SJKY19