
Abstract
This paper presents a comfort-enhanced vibration control design approach for vehicle active suspensions with control delay. By introducing some novel relaxed inequalities, a less conservative bounded real lemma is derived such that the suspension system is asymptotically stable and has an enhanced vibration attenuation performance in the presence of road disturbance and control delay. In the control design, an augmented Lyapunov–Krasovskii functional is proposed to enlarge the degree of freedom of design. A suitable controller can be obtained via a sufficient condition with linear matrix inequality constraints. Compared with the previous methods based on frequently used inequalities and the traditional Lyapunov–Krasovskii functional, the proposed controller can provide better comfort performance for different control delays. Finally, the advantages of the proposed method are demonstrated using numerical examples.
Keywords
Introduction
The topic of vehicle suspension has been the subject of a large amount of research, due to its importance in automobile performance. A superior automotive suspension should consistently provide comfort, good handling, and be able to provide good road holding ability.1,2 To improve the maneuverability of automotive suspensions, many researchers have explored various types of control strategies, such as active control, passive control, and semiactive control. Currently, robust control strategies exhibit good potential for solving vehicle suspension control problems. In recent years, several researchers have proposed advanced active suspension control strategies.3–12 A nonlinear feedback state controller for the control of a quarter-car active suspension model with an extended state observer has been proposed. 3 A robust output vibration controller was proposed for an active seat suspension system for heavy-duty vehicles. 6 A robust fault-tolerant control scheme has been suggested for the active suspension of electric vehicles that used the installation of a dynamic vibration absorber. 7 An energy-efficient adaptive control design was developed for a bioinspired active suspension. 8 An adaptive control algorithm has been developed for a vehicle active suspension that had a dead zone and hysteresis nonlinearities. 12
In addition, H∞ control is also a valid method to enhance the performance of a suspension system. In recent years, it has attracted the attention of a large number of scholars.13–22 A robust polytopic type L2 controller has been designed for an uncertain quarter vehicle suspension. 13 A noniteration feedback method has been developed for active suspension systems with finite-frequency constraint. 14 It is a common phenomenon that input delay frequently happens in hydraulic systems and in-vehicle networks, and output performance may be severely affected due to input delay.15,16 Therefore, the issue of vibration control problems in active suspension systems with input delay has attracted a lot of attention in the past few decades. For instance, Wang et al. 17 studied the vehicle lateral output feedback control problem by considering delay and control saturation. A nonfragile control method was suggested for suspensions with input delay. 21 These H∞ design methods were all confirmed to be effective for systems with input delay.
Thanks to convenient tractability and easy extension, the Lyapunov–Krasovskii functional (LKF) and linear matrix inequality (LMI) methods have attracted great attention due to their ability to perform stability analyses of linear systems with control delays.23–38 In the process of applying these methods, some integral terms need to be defined. In the previous suspension control studies, some methods were used for estimating the upper bound of these integral terms, including the Jensen, Park, and Moon inequalities.19,21 However, applications of these frequently used methods are conservative, as these methods have difficulty in providing a tight upper bound of the integral term. Recently, some novel integral inequalities, such as the Wirtinger-based inequality, reciprocally convex inequality, and Bessel–Legendre inequality (BLI), have been suggested to reduce the estimated gap during criterion deriving.29–38
Due to the advantages of these relaxed inequalities, they provide a promising way to design the robust H∞ controller for delayed active suspension systems. However, related research is quite rare. In general, there are two difficulties in designing a controller using these relaxed inequalities. First, some traditional LKFs have been confirmed to be conservative, and thus choosing a proper LKF is important for control design.31–35 Second, most of the design results are a nonlinear minimization problem and cannot be solved using the LMI technique. Currently, few researchers have published designs of a comfort-enhanced vibration controller for vehicle suspension by using these recently reported inequalities.
This paper focuses on the study of a comfort-enhanced vibration controller for delayed vehicle suspension. The main differences between this proposed method and the previous suspension control studies are summarized as follows: (1) a less conservative bounded real lemma is constructed by combining the second-order BLI with the delay-dependent ERCI approach; and (2) an augmented LKF is proposed to develop a LMI-based control criterion such that the degree of freedom of design can be effectively enlarged. Finally, the advantages of the comfort-enhanced design method are attested using simulation examples. The rest of this paper is arranged as follows. The problem description and some novel relaxed inequalities are given in the next section. A comfort-enhanced design method is presented in “Comfort-enhanced active vibration control” section. Simulation results are provided in “Simulation investigations” section. Conclusions are given in the final section. In Appendix 1, the proofs of the main design results are supplied.
Suspension model and problem description
A typical suspension model given in Figure 1 is considered in this study.
18
The dynamic equations for the vehicle suspension model with control delay shown in Figure 1 can be given as
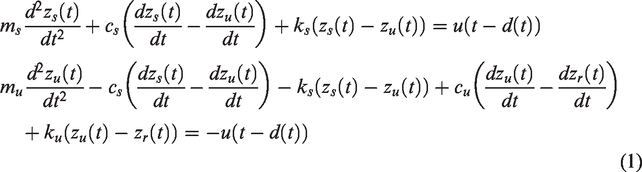
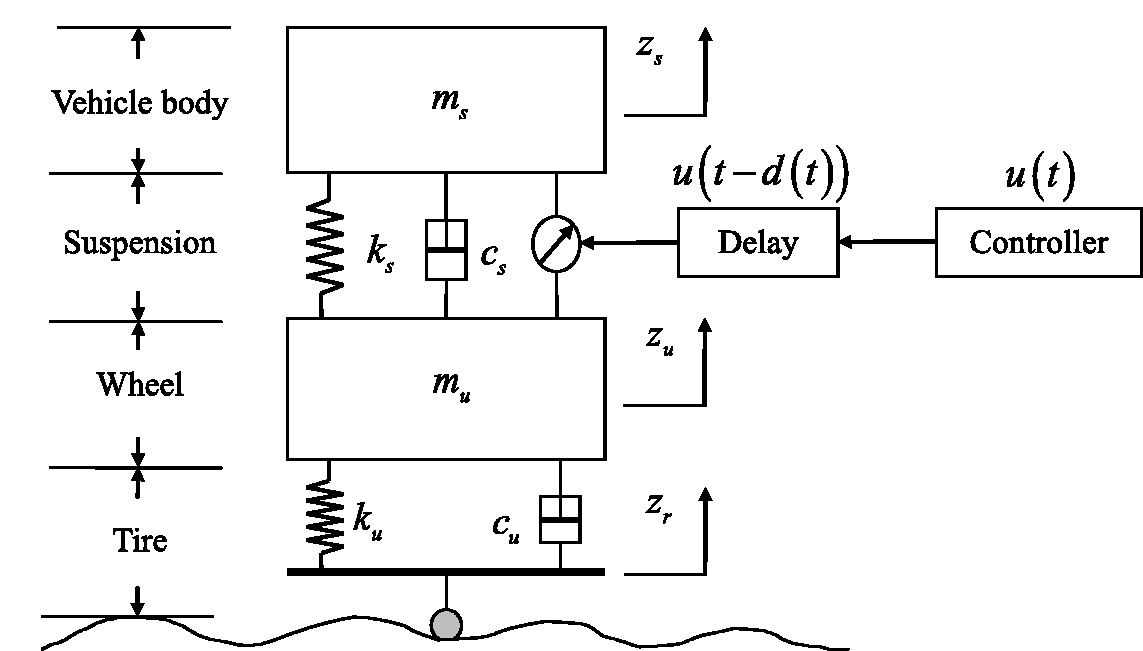
Vehicle suspension model.
In general, the control delay is a time-varying continuous function satisfying

In the design of the controller, comfort performance is a key objective that needs to be considered first. Thus, the vertical acceleration needs to be minimized as much as possible. In addition, small suspension deflection and good road holding stability are also important control objectives, and the requirements are the following

Therefore, the key performances can be given as

Let

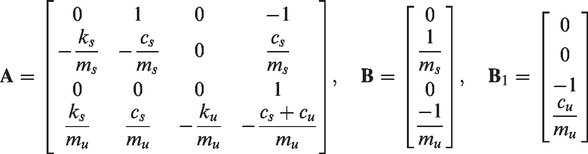
The controlled outputs in equation (4) can be expressed as


In the abovementioned model,

Some novel relaxed inequalities are introduced in the following presentation.


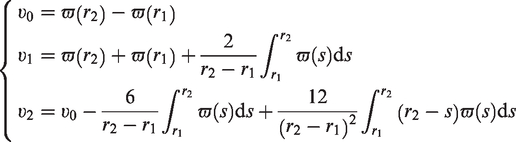





A useful proposition is obtained using Lemmas 1 and 2 together, which is as follows.








Comfort-enhanced active vibration control
In this section, a new bounded real lemma is established based on an augmented LKF and the above lemmas. The main design results are as follows.












Then, under the state-feedback controller
It is clear that Theorem 1 can be directly solved by the standard LMI technique. If the above problem has a solution, then the gain can be given by
For comparison, a corollary based on traditional LKF is presented as follows.








If Corollary 1 is feasible, then the solution can be expressed as

Simulation investigations
In this section, the comfort-enhanced vibration control design approach is applied to the suspension model with the delay described in “Suspension model and problem description” section. The main parameters 18 are given in Table 1. Furthermore, to illustrate the validity of the design approach, the traditional control methods derived from traditional LKF and the Jensen inequality are also compared in this section.
Parameters of the quarter-car suspension model.

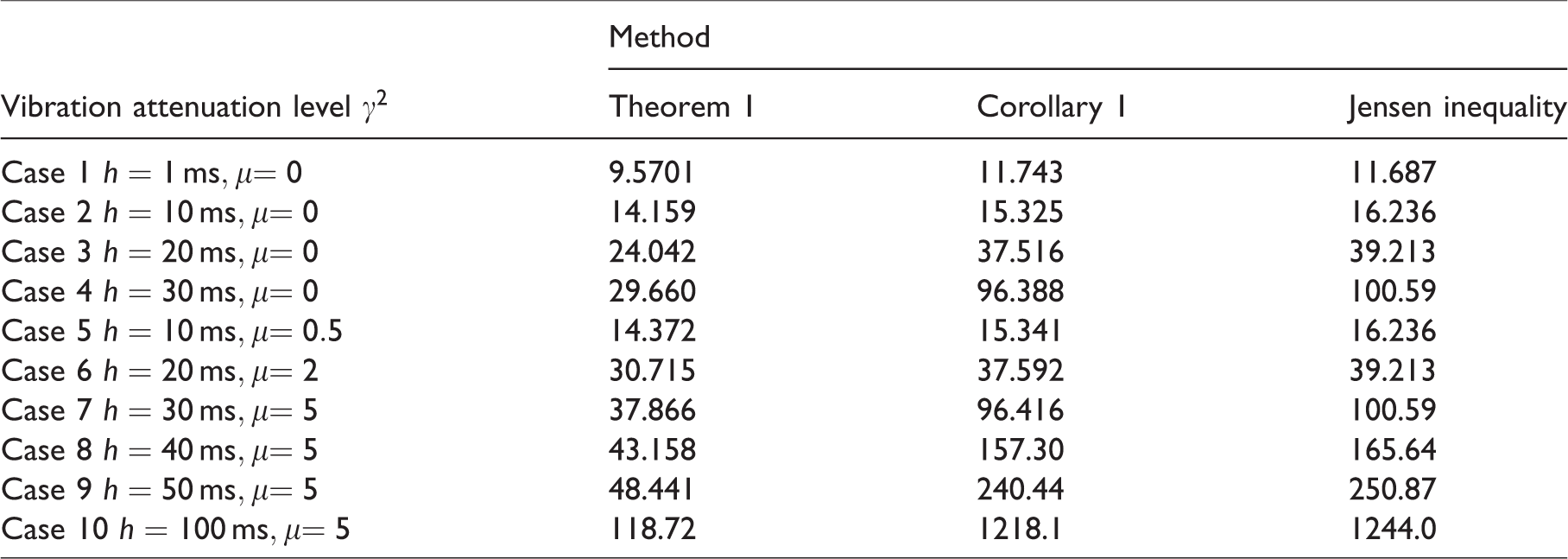
Since the different design values,
For
The value of
In Case 1, the control gains for the above three methods are given by
With the obtained controllers, the frequency-domain comparisons of
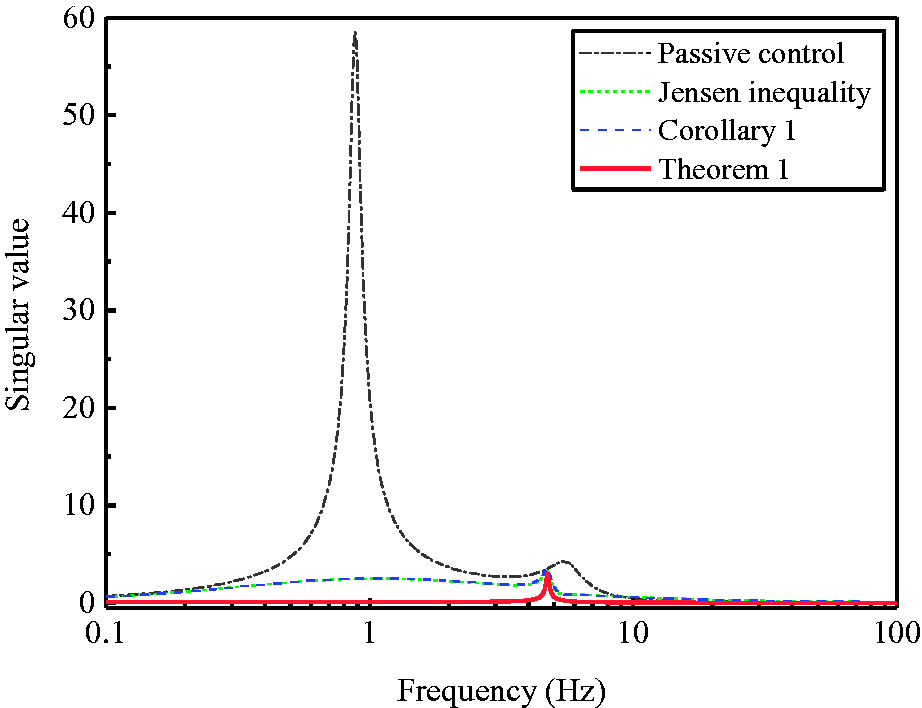
Frequency responses of
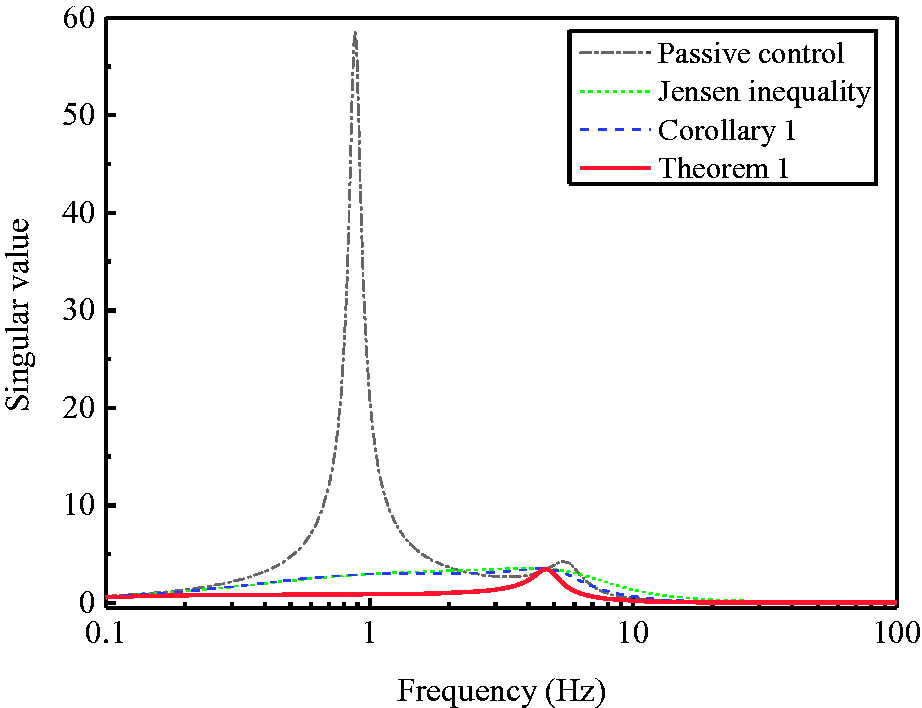
Frequency responses of
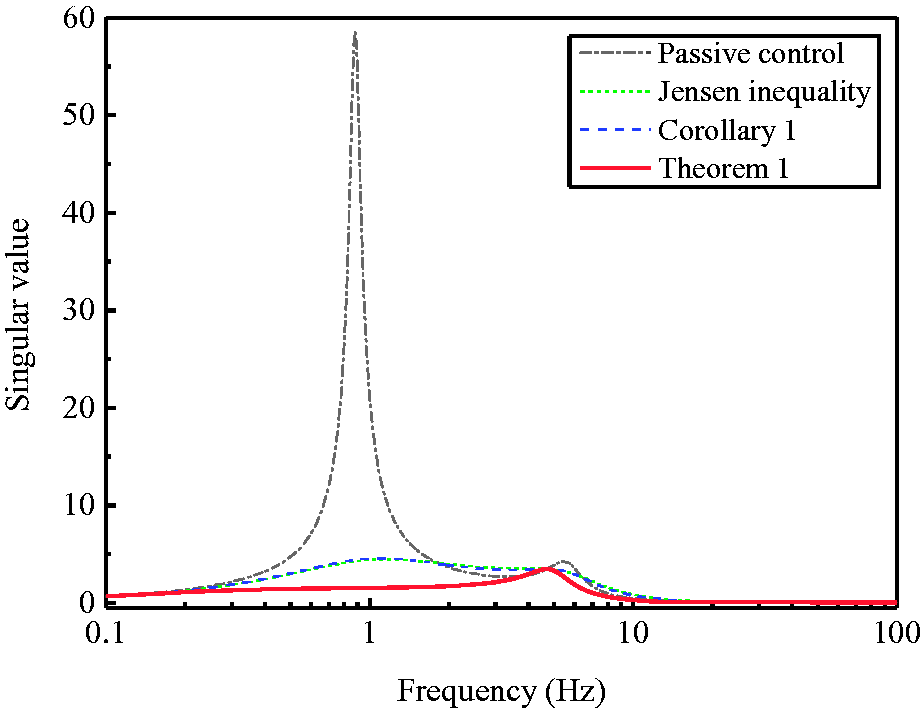
Frequency responses of
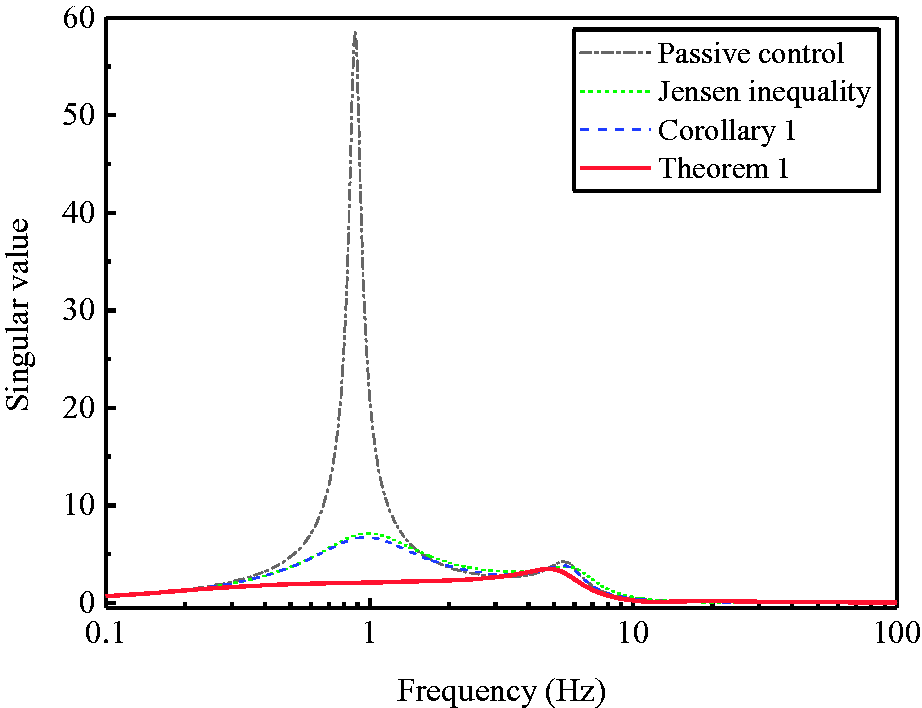
Frequency responses of
To further demonstrate the advantages of the vibration controller in time domain, a single shock road profile is employed and is given by18,20

Under the condition of a single shock disturbance (26), the responses of the controlled outputs, including
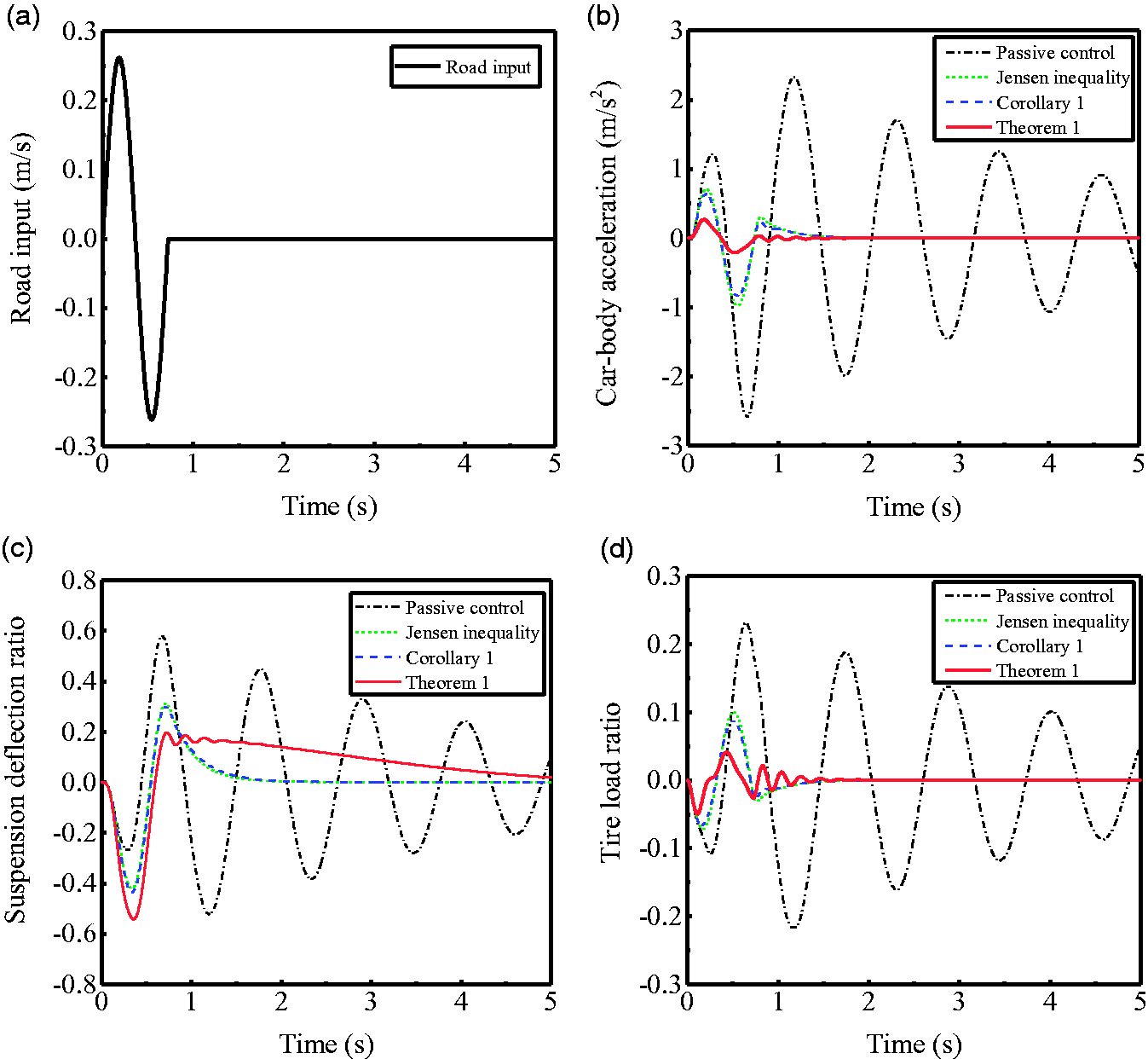
Suspension performance responses in Case 5. (a) Road input, (b) car-body acceleration, (c) suspension deflection ratio, and (d) tire load ratio.
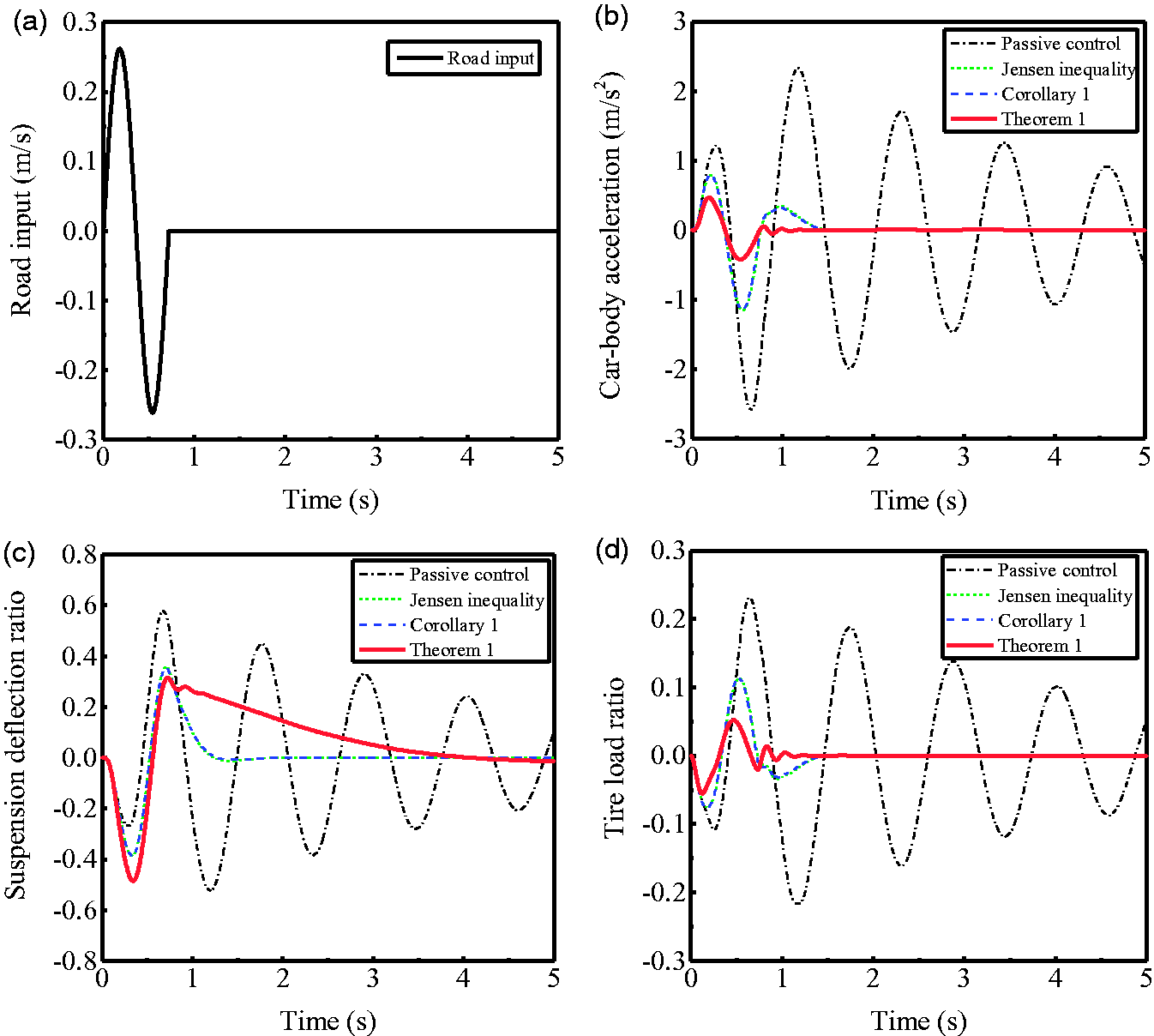
Suspension performance responses in Case 6. (a) Road input, (b) car-body acceleration, (c) suspension deflection ratio, and (d) tire load ratio.
In the context of performance evaluation, ride comfort is closely related to the root mean square (RMS) value of 
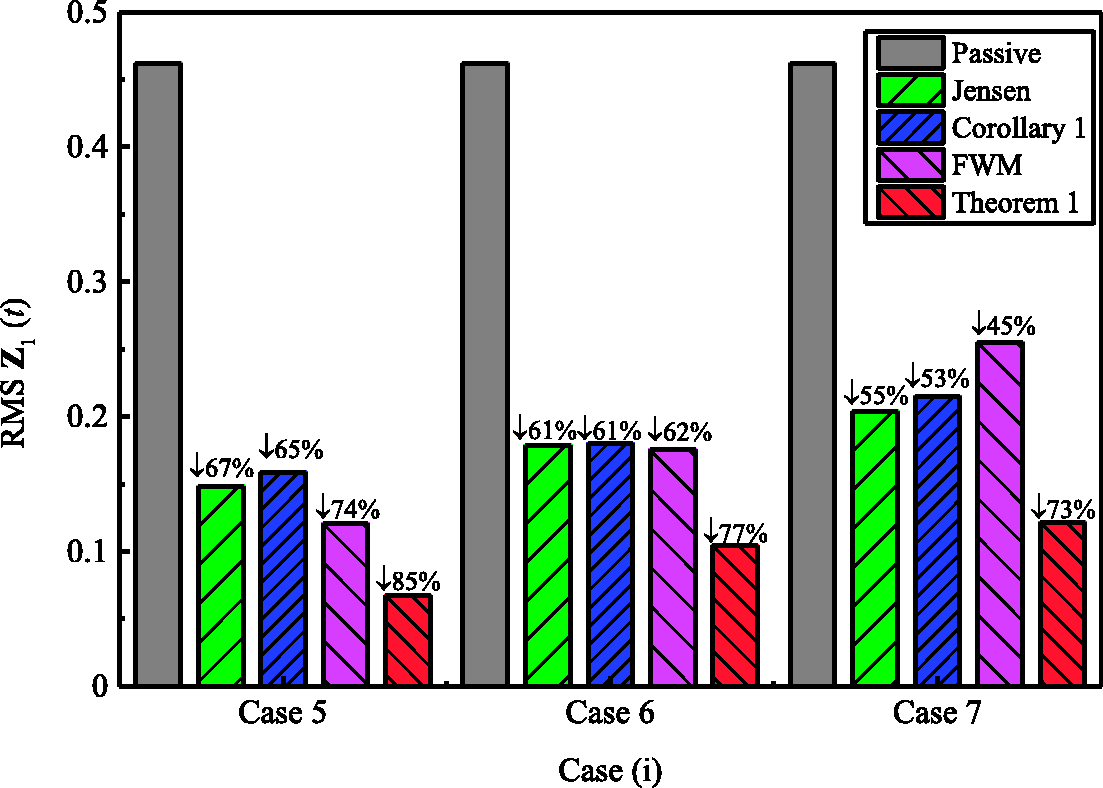
RMS results for a random road profile in Cases 5–7. FWM: free weighting matrix; RMS: root mean square.
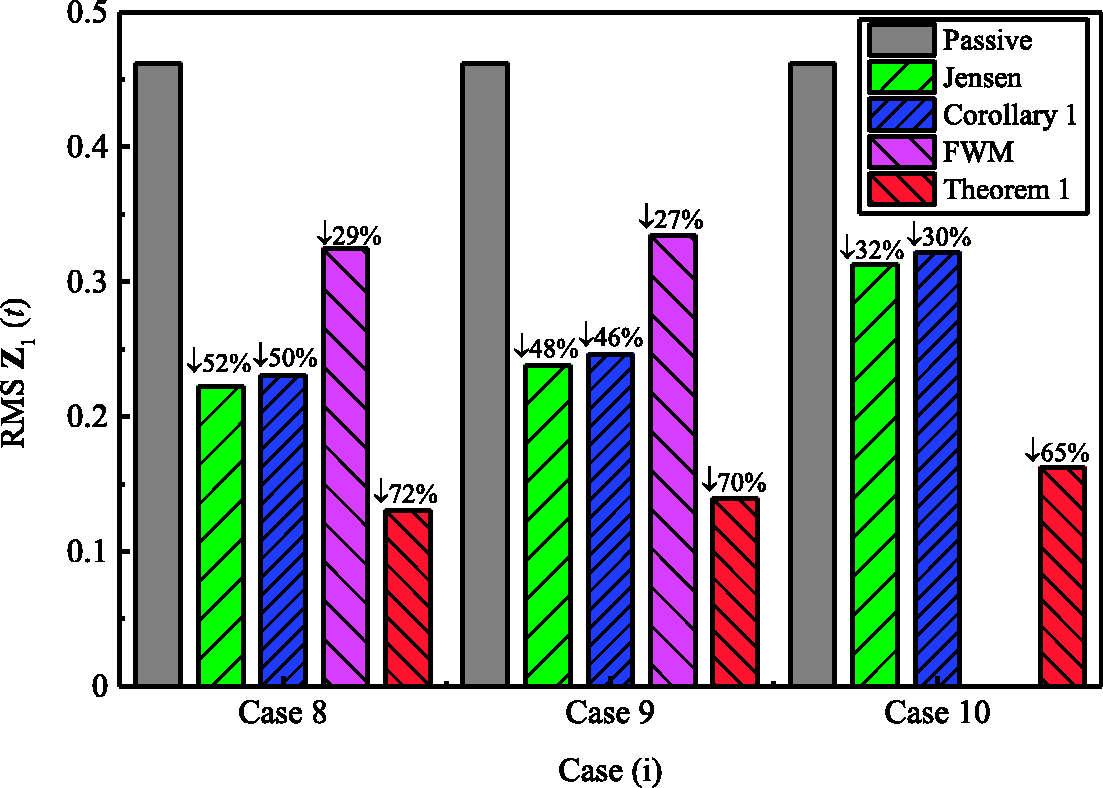
RMS results for a random road profile in Cases 8–10. FWM: free weighting matrix; RMS: root mean square.
Here, the parameters chosen are
The RMS results for the different cases are shown in Figures 8 and 9. The free-weighting-matrix (FWM) approach based on traditional LKF is also compared in the figures. It is clear from the figures that the minimum RMS value can be obtained for the system controlled using the proposed control, which further exhibits the enhanced comfort performance of the designed control approach. Compared with passive control, the RMS value obtained using Theorem 1 decreases by more than 60% when the upper bound of delay reaches 100 ms, and other control methods seem to be weak in the case of a larger delay. On the contrary, the proposed controller is more tolerant in cases with a larger admissible delay bound. Moreover, from the results, it can be seen that the RMS values of Corollary 1 are almost equal to those of the Jensen inequality. In Case 10, the FWM is infeasible no matter what the design parameter.
From the above results, the following conclusions can be drawn:
The proposed controller can provide an enhanced vibration attenuation performance for different cases when compared with other frequently used design methods. Although the relaxed integral inequalities are less conservative than the Jensen inequality, the controller designed using Corollary 1 seems to be as conservative as that of the controller based on the Jensen inequality, which means that the traditional LKF is unsuitable for performance-enhanced design.
Overall, the proposed vibration control design is less conservative in the design of the controller for delayed active suspension systems. Moreover, the vibration attenuation levels can be further decreased by tuning the design parameters
Conclusions
In this study, a comfort-enhanced vibration control method for delayed vehicle active suspensions was proposed. A less conservative bounded real lemma was established by using some novel relaxed inequalities. The control gain was directly derived using LMI optimization, and an augmented LKF was proposed to formulate the design criteria. Simulation results using two well-used road profiles indicated that the proposed controller achieved enhanced ride comfort, while the time-domain constraints were also satisfied when compared with controllers designed with frequently used inequalities and traditional LKF. The results further demonstrated that the proposed LKF significantly reduced design conservatism. In future work, we will consider control saturation and actuator dynamics for the suspension systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was supported by National Natural Science Foundation of China under Grant 51479073 and Qian-Ke-He platform talent [2017]5789-11.