
Abstract
This study proposes a strategy for the vibration isolation mounting of an air compressor to attenuate the vibration near the primary resonance region by using a system with dynamic negative stiffness. The vibration system is modelled as a parametric pendulum system. The nonlinear dynamic responses, including the global stability of the air compressor vibration system, are investigated analytically. The efficiency of the proposed vibration isolation strategy is numerically demonstrated over the original device. To analyse the bifurcation of the nonlinear response of the pendulum system, the phase portrait, bifurcation diagram and maximum Lyapunov exponent of the pendulum system are obtained numerically. Furthermore, the Floquet multiplier level is obtained by solving the perturbation equation numerically and can be used to determine the global stability of the air compressor vibration system.
Introduction
A compressed air generator, or air compressor, is mounted under the body of a railway vehicle. This component supplies circulated air for passengers and provides power for braking and other operations. Thus, the air compressor is an important subsystem in a high-speed train. However, the air compressor generates uncomfortable high-intensity vibration and noise. In addition, the vibration in the compressed air generator influences the stability of a high-speed train and produces fatigue loading, leading to a reduction in the vehicle’s service life. Thus, the vibrations must be isolated to achieve improved performance.
Figure 1(a) shows a type of compressed air generator that is widely used in high-speed trains. To analyse its dynamic response, the system is illustrated as several elements, including a frame tied with a vehicle, vibration suspension parts (consisting of rubber, a spring rope, and viscoelastic damping materials), and a mass, as shown in Figure 1(b). In general, the excitations of a compressed air generator are categorized into internal excitation and external excitation. Internal excitation is due to the internal movement of the rotor excitation, the airflow fluctuations and the excitation resulting from the running motor. Rough roads and wind loads at high speeds induce external excitation. A comprehensive model should account for both excitations.
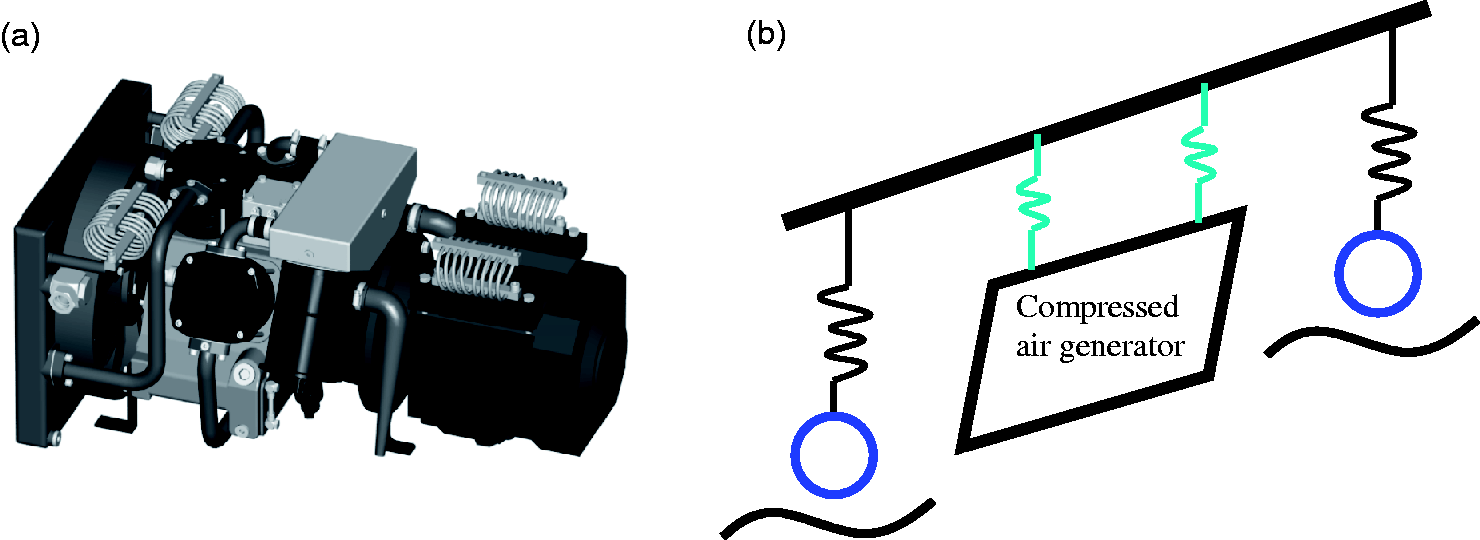
Illustration of an air compressor under a railway vehicle body.
The mathematical model of an air compressor can be simplified as a parametric pendulum system. 1 In this case, a suspension mass is connected to a vertical spring and two horizontal springs, and a pendulum is added as an unbalanced mass to simulate the internal eccentricity of a compressed air generator. The system is generally configured as a geometrical negative stiffness to reduce the dynamic stiffness. A period doubling bifurcation route to chaos occurs in different regions of excitation frequency in this system, and the dynamic response is strongly influenced by the stiffness ratio of the vertical and horizontal springs. When the vertical stiffness is close to the stiffness in the horizontal direction, resonance will occur with the emergence of chaotic motion. Reducing the stiffness in the horizontal direction to increase the stiffness ratio can improve the dynamic response of the vibration system; however, the horizontal spring cannot be removed because it will change the negative stiffness configuration.
Parametric pendulum systems, particularly those that are nonlinear, have been of great interest in the past few decades because of their rich dynamic behaviours.2–5 Ansari and Khan 6 modelled a slider-crank mechanism by modelling the engine connection rod as a pendulum; the resulting governing equations had two degrees of freedom. Mouchet et al. 7 studied the dynamical tunnelling between symmetry-related stable modes in a periodically driven pendulum and presented strong evidence that the tunnelling process was governed by nonlinear resonances that manifest within the regular phase-space islands on which the stable modes were localized. Cartmell 8 summarized the mechanics of three different problems in which pendulum motions can occur; the research indicated that pendulum motion can be a principal but specific feature of the dynamic behaviour of three different mechanical systems, and these differences require different control objectives. Warminski and Kecik9,10 studied the dynamics of a parametric pendulum system and found that the pendulum can be applied as a dynamic absorber to overcome the chaotic motion near the primary parametric resonance and instability; a magneto rheological damper and nonlinear spring were proposed to improve the dynamics.
Complex pendulum systems have been studied in recent years. Náprstek and Fischer 11 modelled a pendulum vibration damper as a two-degree-of-freedom, strongly nonlinear auto-parametric system. They found that in certain domains of pendulum and excitation parameters, the semi-trivial solution does not exist and various post-critical three-dimensional regimes occur. Horton et al. 12 studied the effects of a small ellipticity in driving, perturbing the classical parametric pendulum. They found that rotation could potentially increase with ellipticity, and the most characteristic feature of the classical bifurcation scenario of a parametrically driven pendulum is the resonance tongue. Han and Cao 13 studied various types of bifurcations and limit cycles of a rotating pendulum under nonlinear perturbation. Zhen et al. 14 calculated the transition curves and periodic solutions of a parametric pendulum system by employing the energy method and proved that nonlinearity does not significantly change the area of the stable regions in the parametric plane but alters the positions of the stable regions considerably. Furthermore, the position of the stable regions is strongly related to the amplitude of the periodic vibrations of the pendulum, particularly when the angular displacement of the pendulum is sufficiently large.
Yuanyuan et al. 15 have investigated the resonance vibration in the double-layer semi-active isolation system of marine auxiliary machinery by using averaging method. Their result indicates that the damping of a revised Bingham magneto-rheological damper and the control force have a significant effect on the vibration transmissibility in the resonance region. The model in Yuanping and Siyu’s1 paper can effectively simulate the vibration of a compressed air generator, but it is a simplified model. The coupling effect between the springs in the X- and Y-directions is neglected. The X-direction spring is restricted in the horizontal direction, the Y-direction spring is restricted in the vertical direction, and the X- and Y-direction springs have no effect on each other, which is not completely consistent with the actual situation. Thus, a new model is developed in this paper. In this new model, the primary mass M is also constrained along the horizontal and vertical directions by two massless springs, but the horizontal and vertical springs can have translational movements. A coupling effect exists between the horizontal and vertical springs. The system is allowed to move in a two-dimensional plane, as shown in Figure 2.
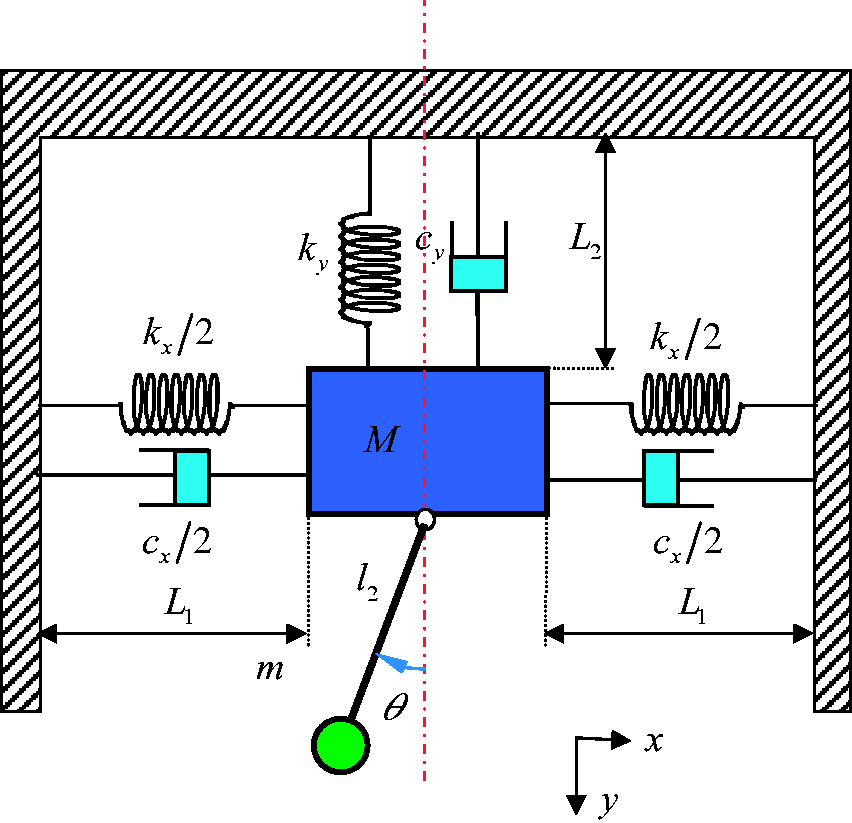
Model of an air compressor system.
The remainder of this paper is organized as follows. The following section introduces the mathematical model derived by the Lagrangian approach. In the subsequent section, the nonlinear characteristics of bifurcation and chaos under lower stiffnesses are calculated by the Runge–Kutta method; approximate solutions are obtained; the stability is analysed based on Floquet theory; and the influence of stiffness is investigated through the root mean square (RMS) and maximum Lyapunov exponent. Finally, suggestions for engineering applications are provided in the final section.
Mathematical model
The stiffnesses of vertical and horizontal springs are denoted as
The kinetic energy

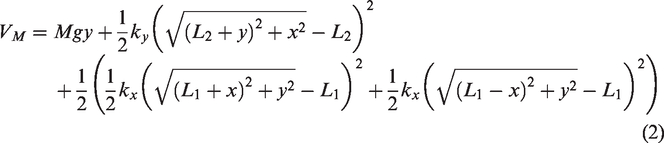
and the potential energy is
Similarly, the kinetic energy of suspended mass m is

The potential energy of mass m is

By combining equations (1) and (3), the total kinetic energy of the system is given by

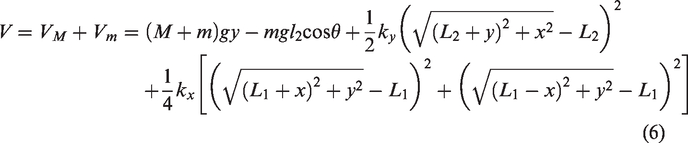
By combining equations (2) and (4), the total potential energy of the system becomes
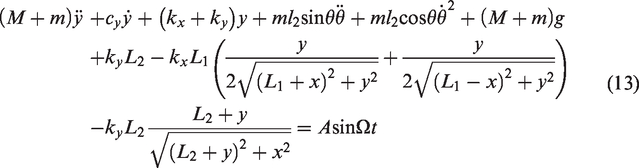
The governing equations are derived by the Lagrange equation as follows

Then, the governing equations are obtained as follows



There are two types of excitation for a compressed air generator. The first type of excitation is external excitation induced by road roughness that excites the train bogie. This type of excitation is generally applied to the base. The other type of excitation is internal excitation generated when the compressed air generator is in operation. In this work, a simple external excitation is considered; it is assumed that the external force is applied only on the suspension mass along the vertical direction, namely

Moreover, the dissipation due to the vertical and horizontal dampers is modelled in the form of viscous damping; therefore


The dimensionless form of equations (12)–(14) is
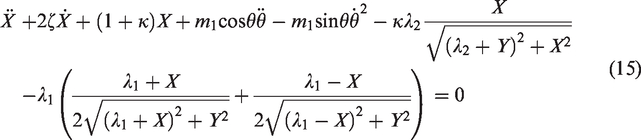
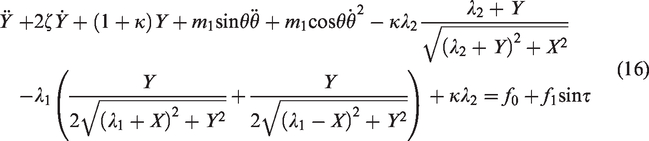

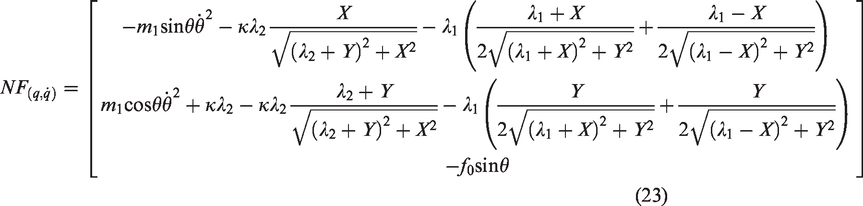
Equations (15) to (17) are written in matrix form as






Nonlinear characteristics
Bifurcation and chaos
In this section, the dynamic responses of the suspension pendulum system are determined. The amplitude and frequency of the external excitation are selected as control parameters. The stiffness ratio
In the first case, f1 =0.05 is considered; the bifurcation diagram and maximum Lyapunov exponent of the pendulum system with respect to excitation frequency ω are shown in Figures 3 and 4, respectively. These figures indicate that there are large variations in the periodic and chaotic motions in this case. When the excitation frequency is lower than 0.56, the system undergoes periodic motion. As the excitation frequency increases, a periodic double bifurcation phenomenon appears around a frequency of 0.56, and the maximum Lyapunov exponent intersects with zero. The system undergoes period-2 motion when ω∈(0.56,0.66), chaotic motion appears for ω∈ (0.6624,0.68), and the maximum Lyapunov exponent is greater than zero in this region. The phase diagrams of the period-1 motion, period-2 motion, period-4 motion and chaotic motion for the four selected excitation frequencies are shown in Figure 5. In these figures, the cycle shown in red indicates the Poincare points indicative of the period of a motion.
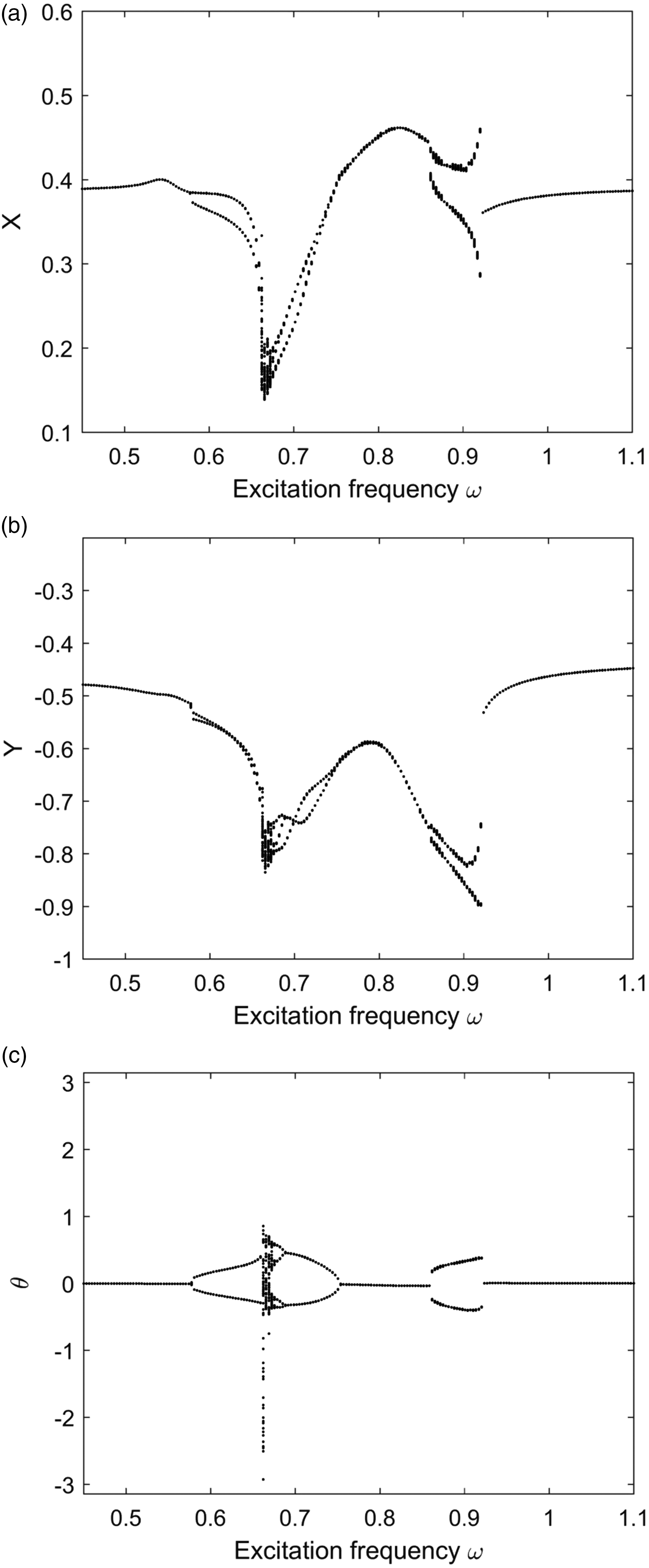
Bifurcation map with
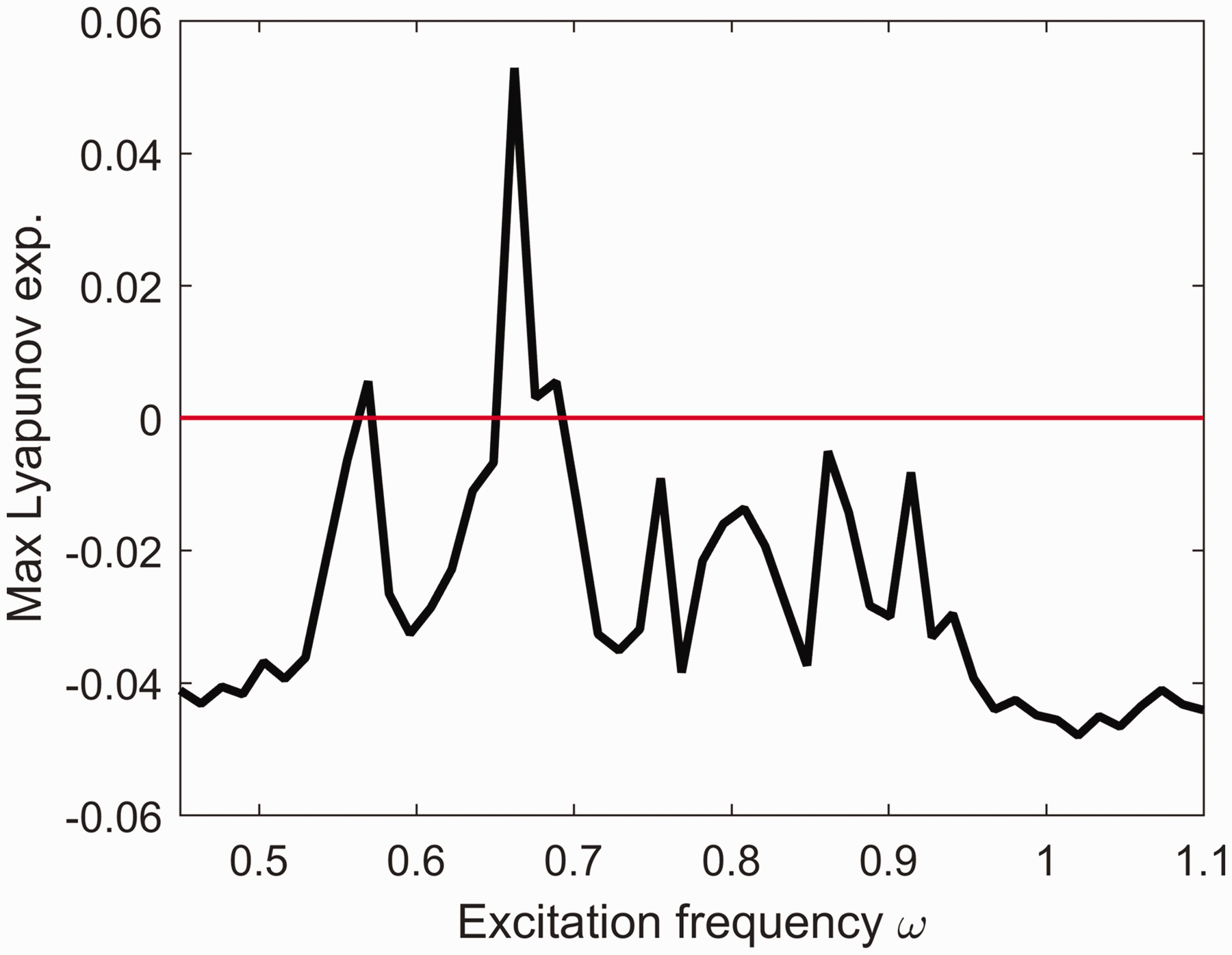
Maximum Lyapunov exponent with
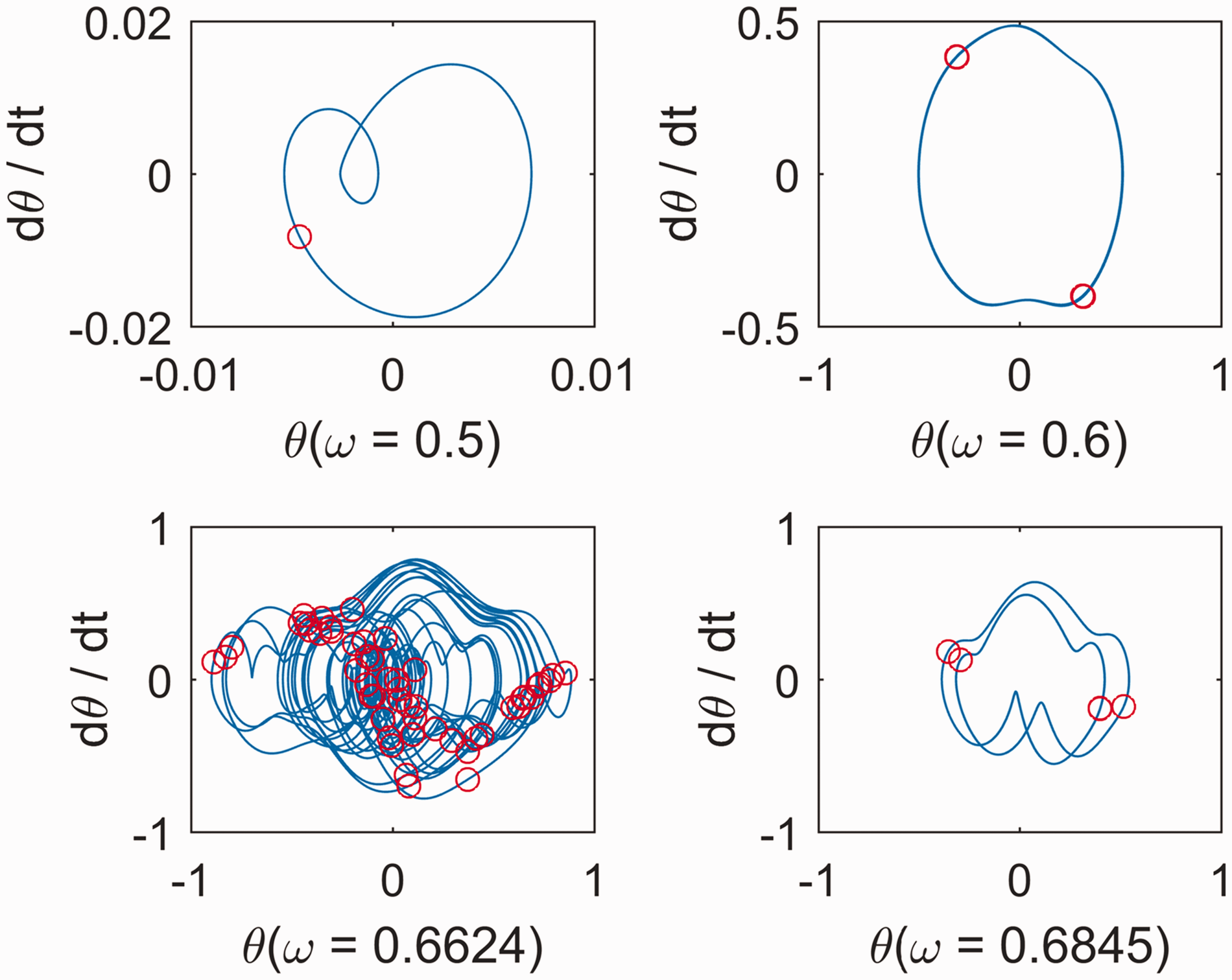
Phase portrait and Poincare points at different excitation frequencies
Next, the amplitude of the external excitation is increased to
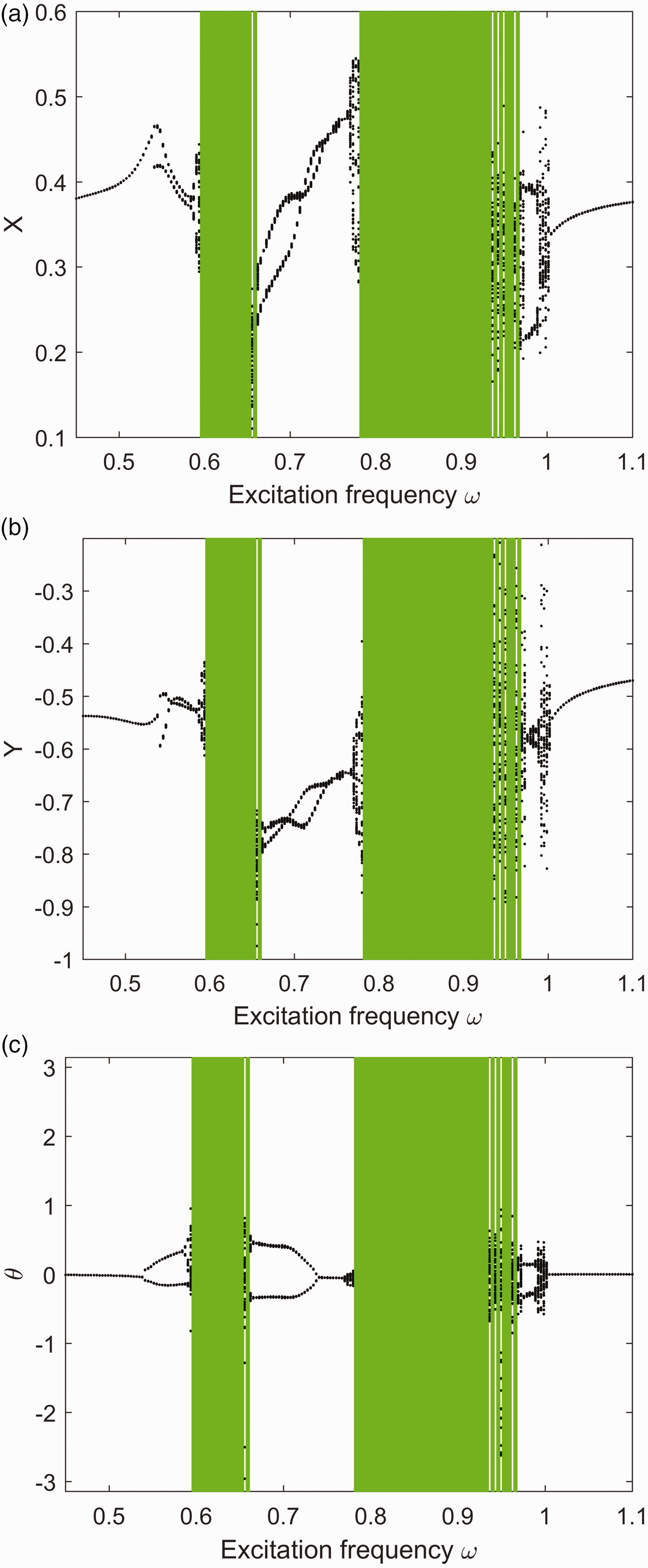
Bifurcation map with
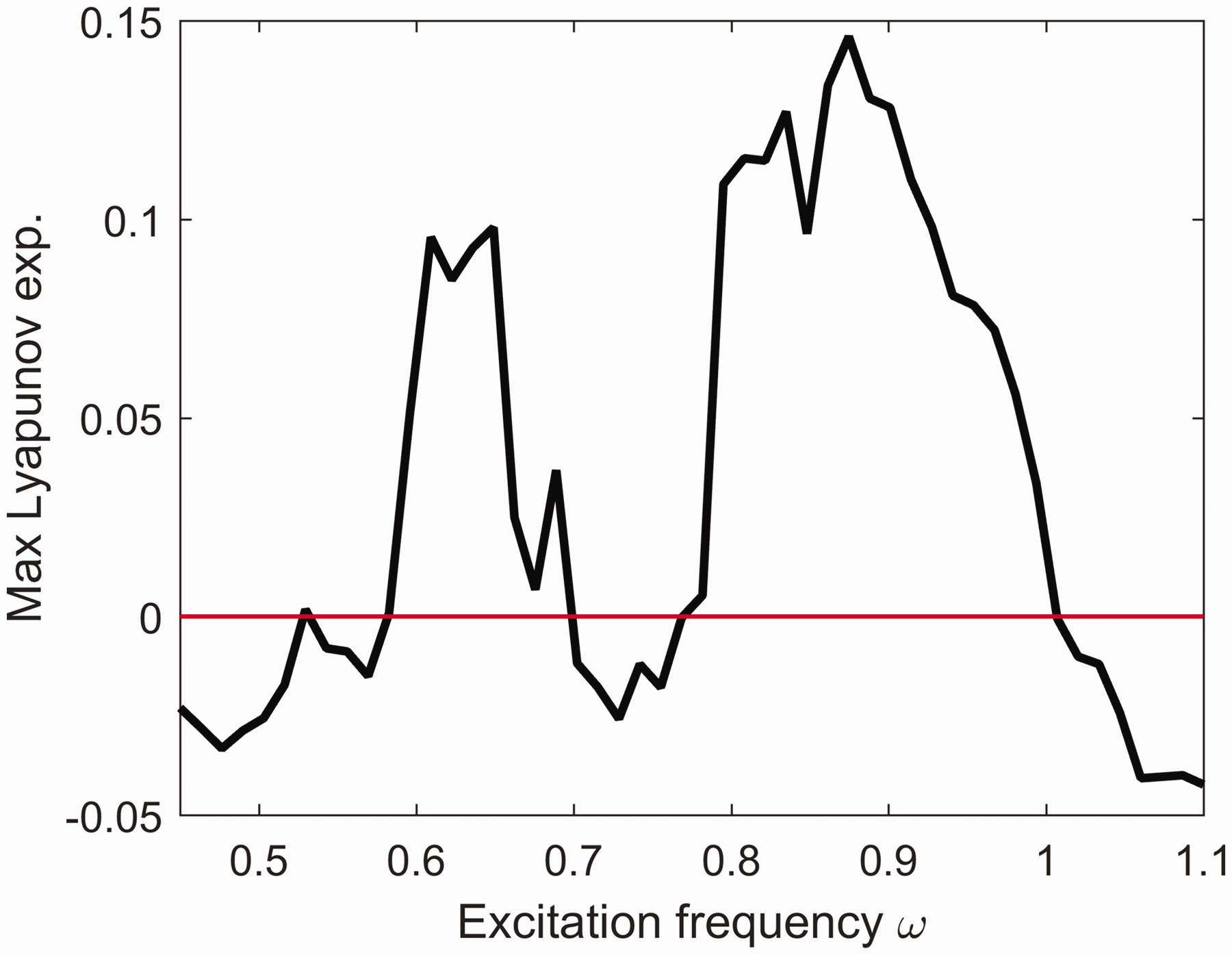
Maximum Lyapunov exponent with
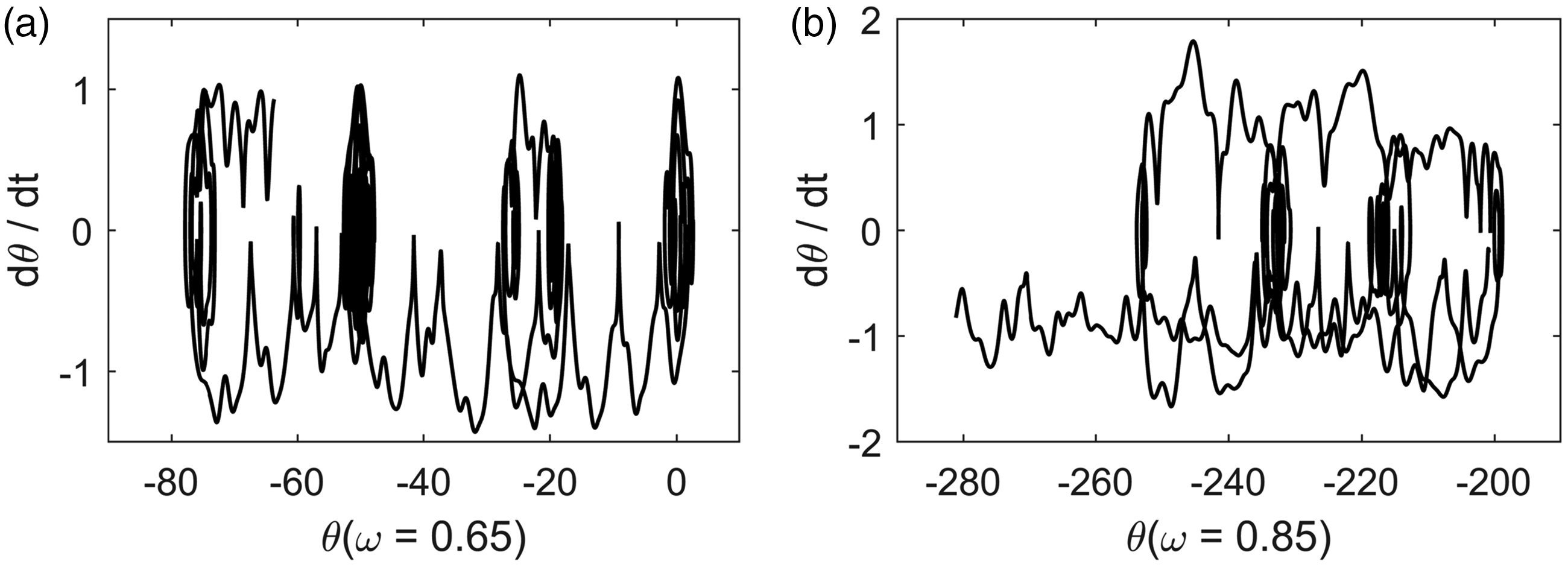
Phase portrait at (a)
Global stability
To provide a comprehensive understanding of the stability of the pendulum vibration system, this section explores the global stability of the system in parameter plane
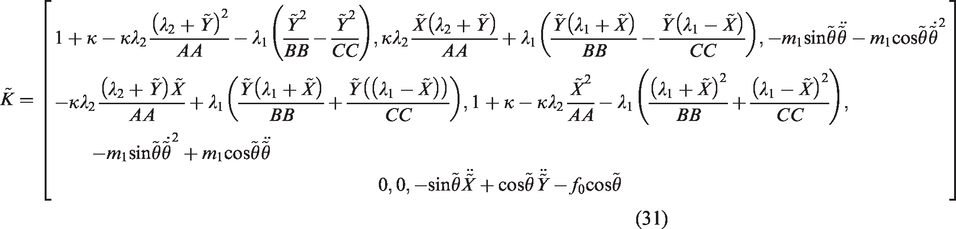
The determinant of equation (20) is

Here,

Let

Substituting equation (27) into equation (26) and by Taylor expansion, the perturbation equation is obtained as




Assuming that
In the following, we limit the excitation frequency in the range from 0.2 to 1.1 and the excitation amplitude
Floquet multiplier level curve in the (
Influence of stiffness
To further identify the effect of the stiffness ratio
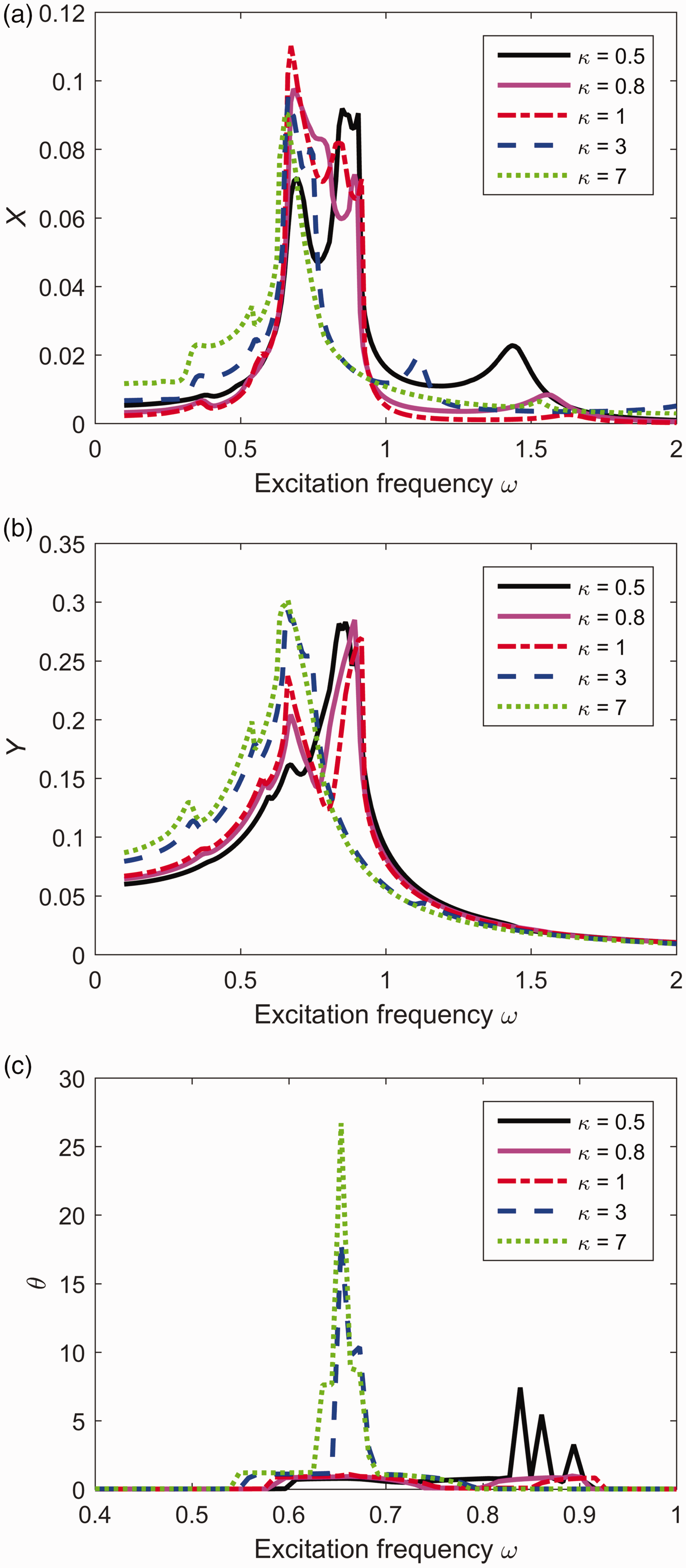
Response diagram for
When the stiffness ratio is, k= 0.5 the maximum values of the dynamic response in the X- and Y-directions appear in the region (0.5, 1), and two clear peaks appear in this region. However, the oscillation of mass m has another trend when the excitation frequency increases, and the rotational solution occurs in the region (0.8, 0.9). This result indicates that there is a high-amplitude vibration in the primary resonance region, but the rotational motion is limited to a small region.
When the stiffness ratio increases to 0.8 and 1, minor changes occur compared to when k=0.5. However, the rotational motion of mass m disappears.
As the stiffness ratio
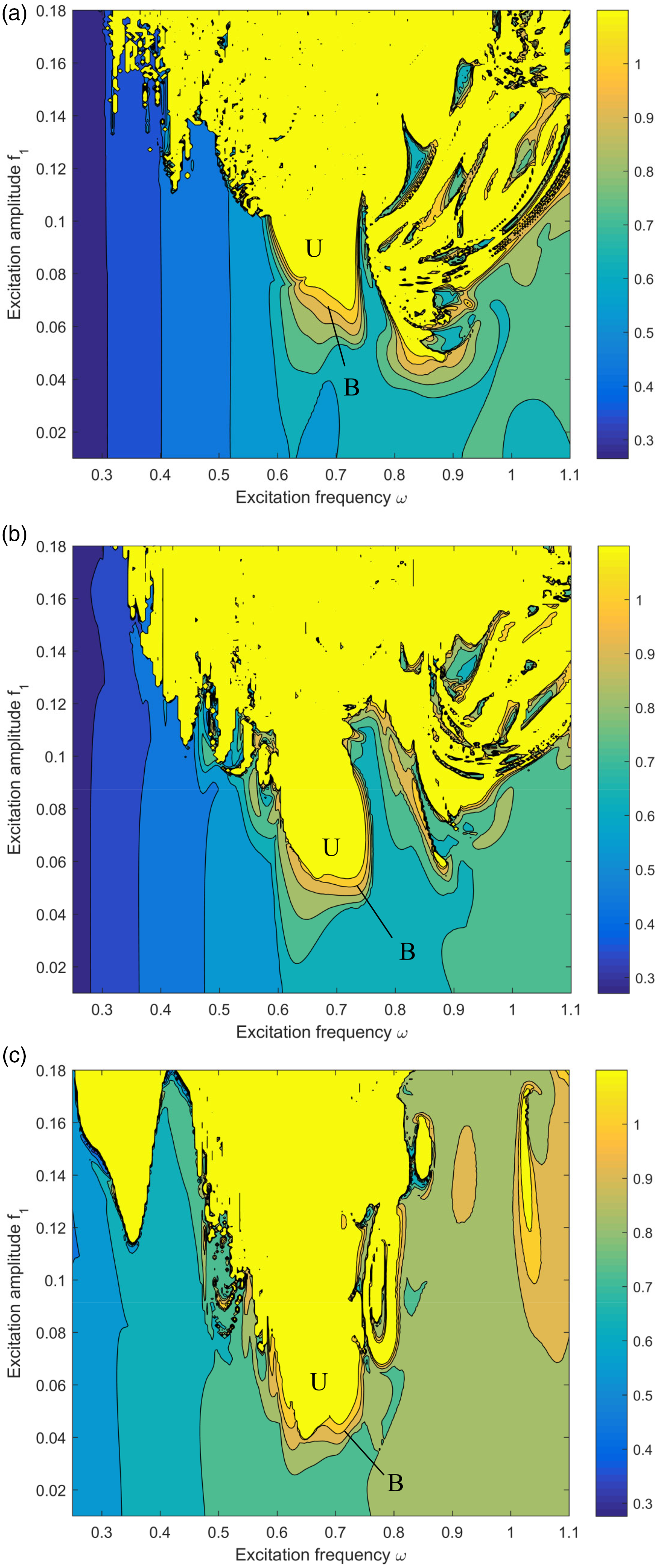
To provide a comprehensive understanding of the effect of stiffness ratio
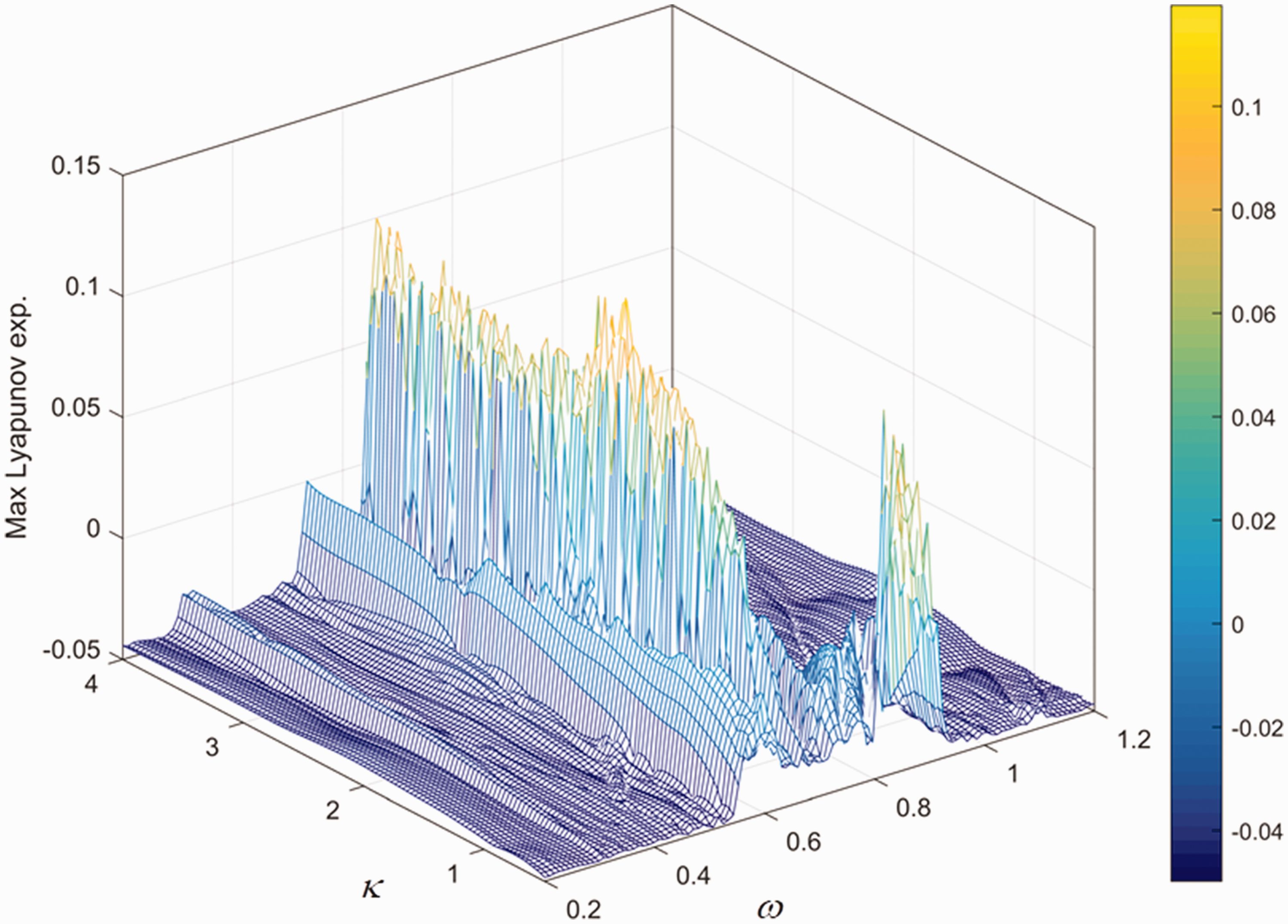
Max Lyapunov exponent in parameter space
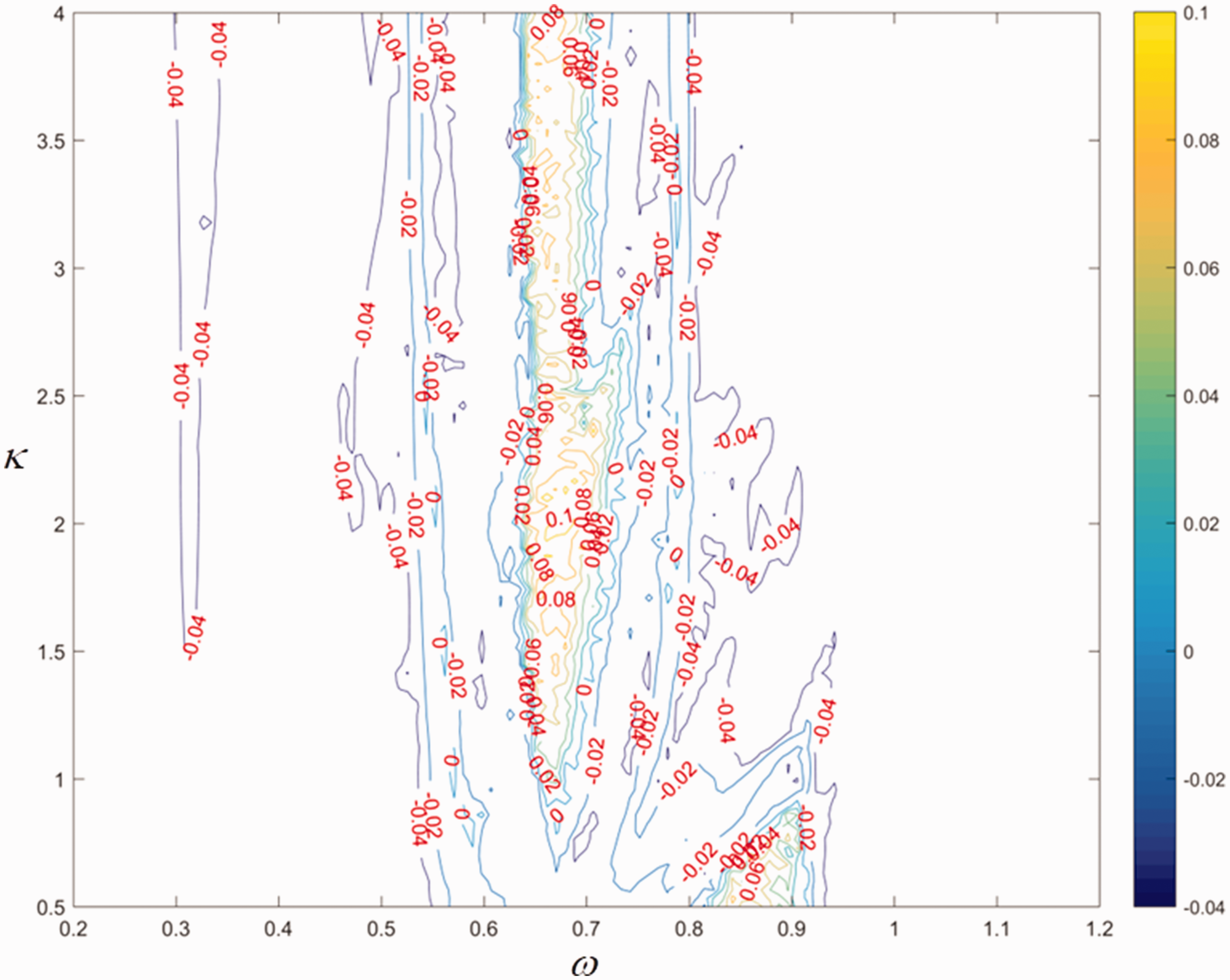
Contour map of the Max Lyapunov exponent in parameter space
For kϵ[0.5,0.892), chaos occurs in the region ω∈ (0.8,0.9), and the scope of the chaos decreases with the increasing of stiffness ratio
When
When
The results indicate that the stiffness ratio
Conclusions and remarks
A vibration isolation mounting strategy for an air compressor is proposed to attenuate the vibration near the primary resonance region by using a system with dynamic negative stiffness. The coupling effect of the horizontal and vertical springs of a compressed air generator is included in the model. The phase portrait, Poincare map, bifurcation diagram and Floquet multiplier are obtained numerically to analyse the bifurcation and stability of the nonlinear response in this nonlinear vibration system. The results indicate the following:
When the external excitation amplitude is When the amplitude of external excitation is The stability of the pendulum system is sensitive to the stiffness ratio
Footnotes
Acknowledgement
Lu thanks Louis A Beecherl Jr, Chair for his additional support.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: the National Science Foundation (NSF) under Grant No. ECCS-1307997.