
Abstract
Dynamic vibration absorber is an ideal device for vibration control at specific frequencies. In order to get a robust vibration control performance, multiple or distributed dynamic vibration absorbers are usually used for suppressing vibrations in plate structures. Optimization methods for the single dynamic vibration absorber in various vibration systems had been proposed many years ago. However, the analytical optimization solutions with respect to the distributed dynamic vibration absorbers for the plate structures have not been found. In this paper, the optimization problems of the distributed dynamic vibration absorbers for suppressing vibrations in plates are studied. Vibration equations of the plate carrying distributed dynamic vibration absorbers are established using modal superposition method. The similarities of vibration shapes of the dynamic vibration absorbers and mode shapes of the plate are revealed. According to the characteristics of the vibration shapes of dynamic vibration absorbers, the vibration equations of the plate carrying distributed dynamic vibration absorbers are transformed into a form of equations of a two degree of freedom system. The analytical optimization formulas of the distributed dynamic vibration absorbers for suppressing vibrations in plates are derived by applying the fixed-points theory. The effectiveness of the optimization formulas is verified through numerical simulations. The simulation results also show that a brilliant multi-mode vibration control can be realized by using the optimized distributed dynamic vibration absorbers.
Keywords
Introduction
The dynamic vibration absorber (DVA) originally invented by Frahm 1 a century ago is an ideal device for vibration control at specific frequencies. Because of its simplicity, reliability and efficiency, the DVA is widely used to reduce the noise and vibration of rail vehicles, aircraft cabins and many other structures.2,3 The vibration suppression performance of the DVA is sensitive to the variations of the vibration characteristics of the host structures. Thus, even a slight deviation from the parameter setting can result in a significant decrease in the vibration reduction performance when a single DVA is used. Therefore, adaptive DVAs and multiple DVAs are usually used to overcome the disadvantages aforementioned.4,5 Gardonio and Zilletti 6 and Zilletti and Gardonio 7 studied the vibration control characteristics of the switching and sweeping tuneable DVAs. Through the appropriately adjustment, the broadband vibration control can be realized using the tuneable DVAs. Acar and Yilmaz 8 designed an adaptive DVA with negative stiffness, wherein the negative stiffness element reduced the adaptation effort without sacrificing the speed of the tuning. Multiple passive DVAs are usually used to reduce the vibrations in continuous structures. The multi-frequency impact vibration and noise of the floor are reduced effectively by using the multiple DVAs in the work of Hwang et al. 9 Brennan and his co-workers 10 studied the effect of distributed DVAs on the transmission efficiency of bending wave in the beams. Thompson studied 11 the effects of continuous distributed DVAs on the reduction of broad-band wave propagation in beams and pointed out the general method for widening the vibration reduction bandwidth. Continuous distributed DVAs are used to control the broad-band wave propagation in beams in the work of Thompson, 11 wherein the general method for extending the vibration reduction bandwidth is proposed. Researchers pointed out that the multiple DVAs are more effective than the single DVA in achieving the robust, broadband and large scale vibration suppressions.12–14
Whether the goal of utilizing DVAs is to reduce the vibrations at specific frequencies or is to reduce the vibrations in a frequency band, the DVAs need to be optimized to get the best vibration reduction effect. Optimization problems of the DVA used for the vibration reduction of single DOF systems had already been perfectly solved. The dynamic problems of the single DOF systems carrying a DVA were originally studied by Ormondroy and Denhartog. 15 The fixed-points theory proposed by Denhartog is the most classical and effective optimization method. Another classical H2 optimization method for the DVA used for the vibration control of single DOF systems was proposed in the research work of Crandall and Mark. 16 In 2002, Asami et al. 17 proposed the analytical formulas to the H2 and H∞ optimization of the DVA attached to a damped linear system. Shen et al. 18 found that the fixed-pints theory is also applicable to the DVA with negative stiffness. Through the analytical studies, they proposed the analytical solutions of the frequency ratio, damping ratio and negative stiffness ratio of the DVA.
There are also abundant researches studying the optimization methods of the single DVA used for the vibration reduction of continuous structures. Jacquot 19 studied the effect of the DVA on the vibration suppression of the plate subjected to random excitation and proposed the transfer function which is used to predict the vibration reduction performance and optimized the parameters of the DVA. The suppression of random vibrations of a plate using a DVA was studied in the work of Jacquot, 19 wherein he derived the transfer function which can be used to predict the vibration reduction performance and optimize the parameters of the DVA. Cheung and Wong 20 proposed the analytical formulas of the H∞ and H2 optimization method of the single DVA used to suppress vibrations in plates. With the application of the fixed-points theory, Dayou 21 proposed the concise optimal tuning formulas of the single DVA for low-frequency vibration reductions of beam structures.
However, there are very few concise and easy-to-use optimization method for the vibration reduction of continuous structures using multiple or distributed DVAs. Based on the dynamic stiffness element method of beam structures, Chen and Huang 22 proposed an optimal tune method for the multiple DVAs to achieve the optimal vibration control of the fundamental mode of a beam. Considering the complexity of the vibration systems consisted of continuous structures carrying multiple DVAs, researchers usually solve this optimization problem by utilizing optimization algorithms such as linear quadratic regulator-based optimization method and genetic algorithm.23–25 The studies in this paper aim to explore out a concise optimization method of distributed DVAs for suppressing vibrations in plate structures.
This paper is organized as follows. Equations of motions of the plate carrying distributed DVAs are given in the next section. Then, the vibration characteristics of the distributed DVAs are analysed. In the subsequent section, the analytical optimization formulas of the distributed DVAs are derived. Then it is followed by a section where the effectiveness of the optimization formulas is verified through numerical simulations, and also, the optimal locations and the optimal amounts of the DVAs are revealed. Finally, several conclusions are drawn in the last section.
Equations of motions
As shown in Figure 1, a thin rectangular plate on the rectangular domain



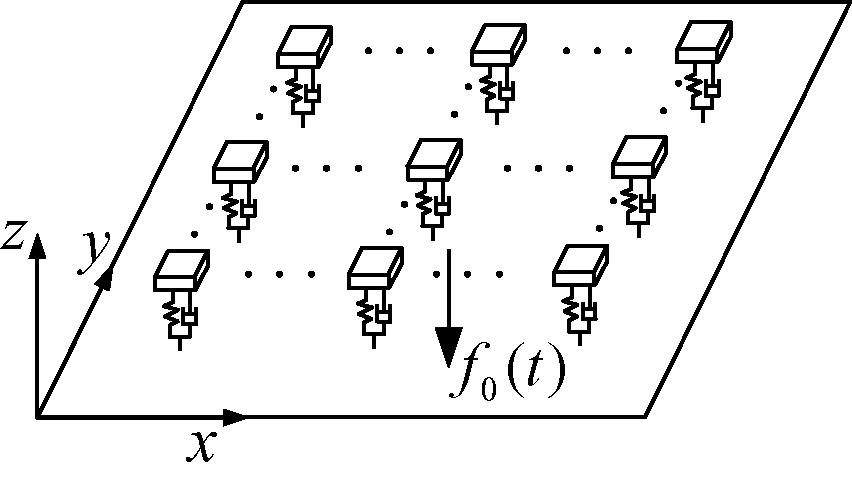
A rectangular plate carrying DVAs. DVA: dynamic vibration absorber.
Using modal expansion method, the vibration displacement of the plate can be approximated by a J term modal series



Substitution of equation (4) into equation (1) and the use of the modal orthonormal conditions lead to the differential equations of the vibration system of the plate carrying DVAs














The eigenvalue problem of the


With the attachment of the DVAs, the ith mode shape function of the plate is

Under the harmonic motion supposition, the vibration amplitude of the M DVAs and the J modal displacements of the plate can be calculated by equation (7)


Finally, the frequency response of the plate can be obtained

Vibration characteristics of the DVAs
In the low-frequency range where the natural frequencies of the plate are well separated, the vibration of the plate during a certain frequency band is dominated by the nearby single vibration mode. This single vibration mode can be set as the target vibration mode to optimize the DVAs to achieve the vibration control in this certain frequency band. The vibration characteristics of the distributed DVAs are numerically studied in this section to afford the theoretical basis for the optimization.
M DVAs are equally distributed on the plate surface with
The parameters of the plate and DVAs in numerical calculations are shown in Table 1. All edges of the plate are simply supported and the resonant frequency of each DVA is tune to the modal frequencies of the plate. Under the condition that all edges of the plate are simply supported, the mode shape function is given by

Parameters of the plate and DVAs in calculations.

DVA: dynamic vibration absorber.
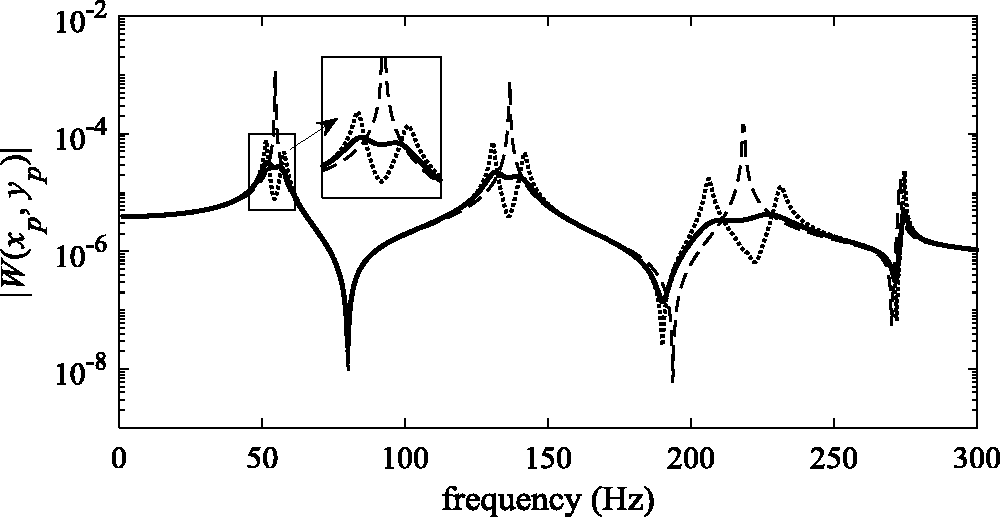
From equation (20), the frequency response of the plate at the position
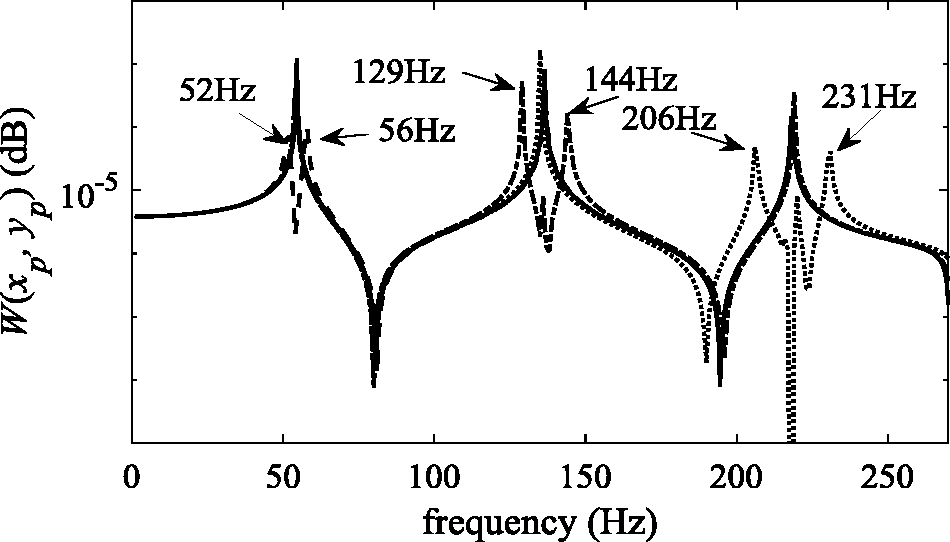
Vibration response of the plate: ––bare plate, - - - DVAs are tuned to 54.5 Hz, -·-DVAs are tuned to 136.5 Hz, ........... DVAs are tuned to 218 Hz. DVA: dynamic vibration absorber.
Due to the introduction of the distributed DVAs, the vibration peaks on the targeted mode of the plate are “absorbed,” while the two new vibration peaks emerged on both sides of the original peak. The optimization of the DVAs is to suppress the vibrations of the plate on the two new vibration peaks. So, the vibration characteristics of the DVAs at the new emerged vibration peaks are needed to be studied.
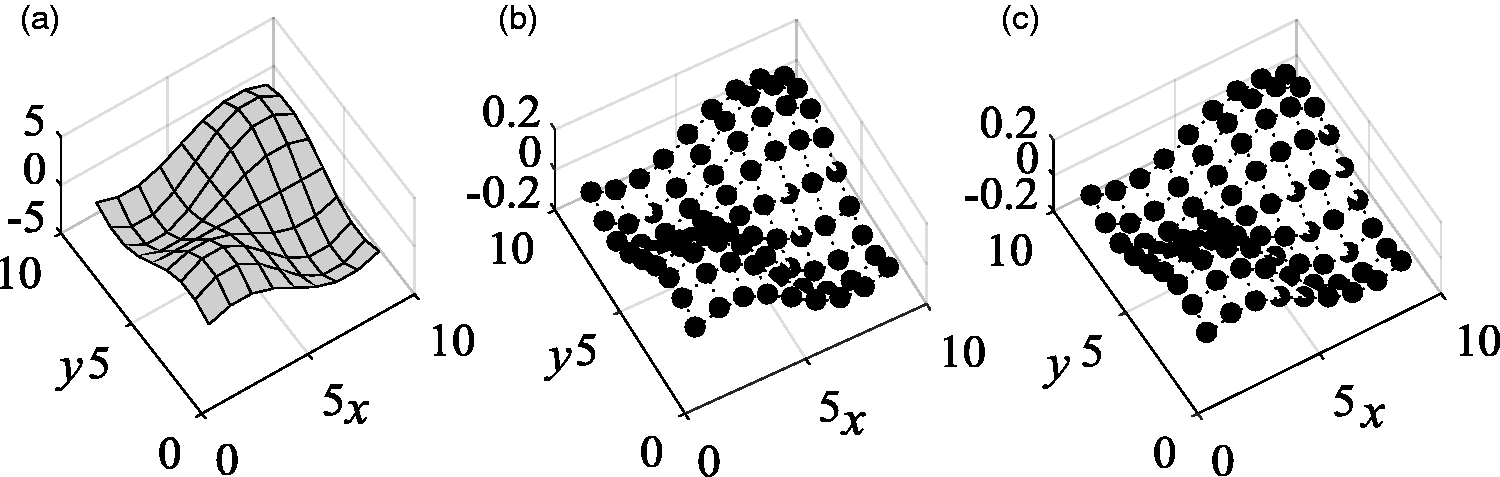
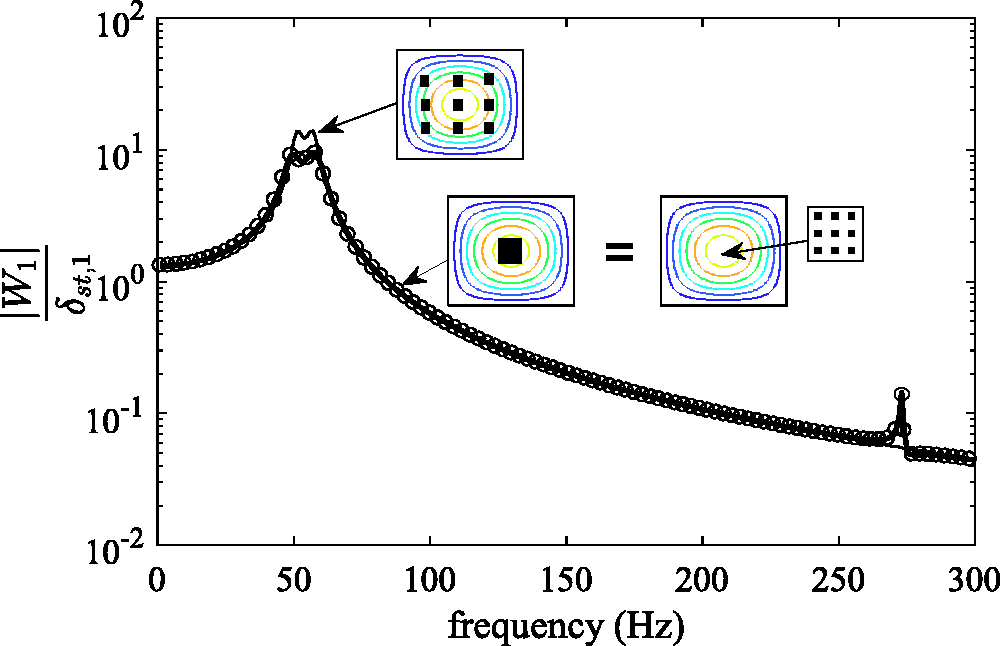
The working frequencies of the DVAs are set to the first three natural frequencies of the bare plate and the vibration shapes of the DVAs are calculated through equation (16). The vibration shapes of the DVAs are plotted in Figures 3 to 5, respectively. In order to analyse the relationship between the mode shapes of the plate and the vibration shapes of the DVAs, the plate’s mode shapes represented by the DVA attaching points on the plate are also plotted in each figure. Since the mass ratio of DVAs is not more than 10%, the vibration mode shapes of the plate have nearly no change. As a result, the new resonant modes have the same shapes with the original modes of the bare plate. In fact, the part (b) and (c) in Figures 3 to 5 depict the vibration displacement of all the DVAs which are marked as black nodes. It is interesting that the vibration shapes of the DVAs represented by those black nodes are same with the mode shapes of the plate.
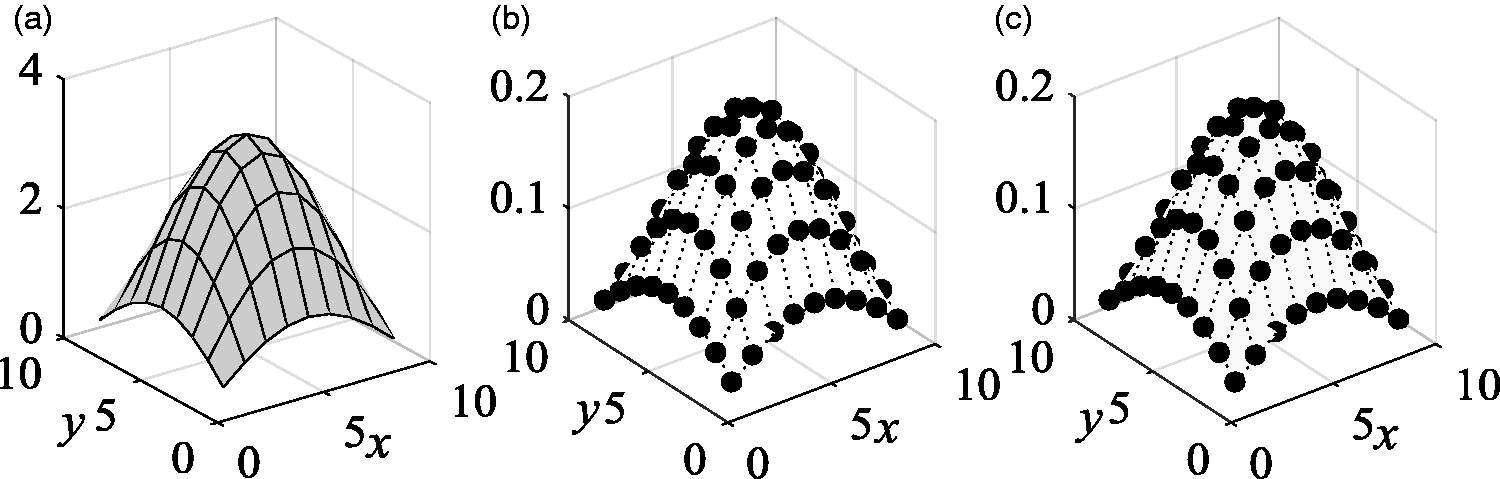
Vibration shapes of the plate and DVAs: (a) the first mode shape of the plate, (b) the vibration shape of the DVAs at 52 Hz, and (c) the vibration shape of the DVAs at 56 Hz. DVA: dynamic vibration absorber.
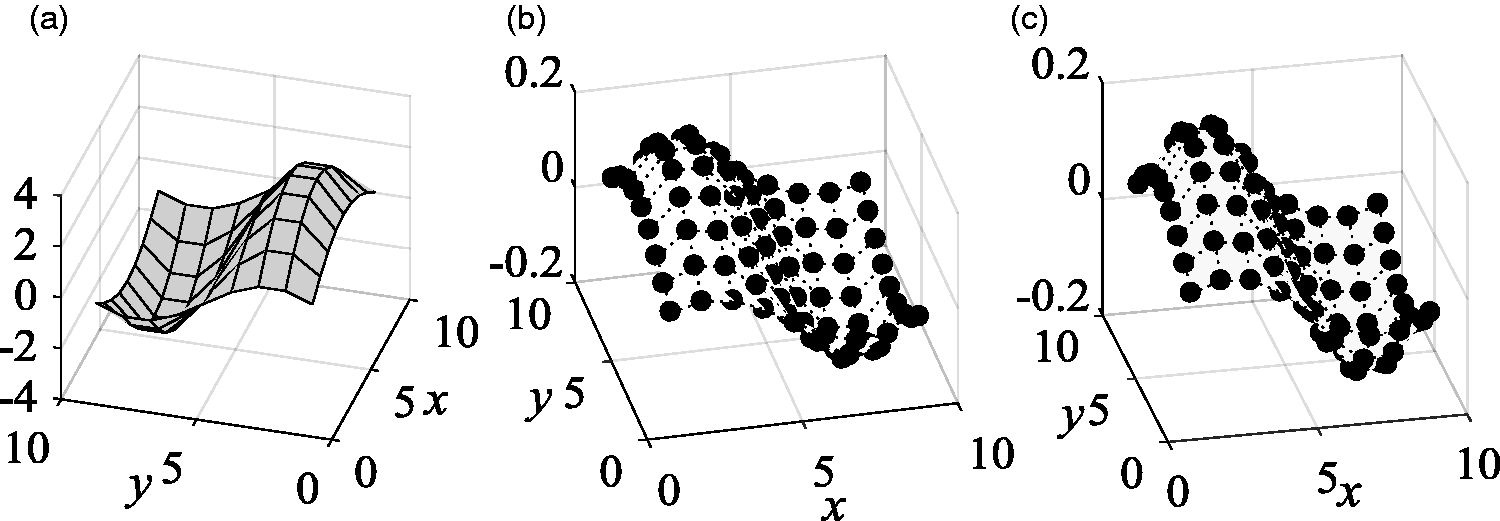
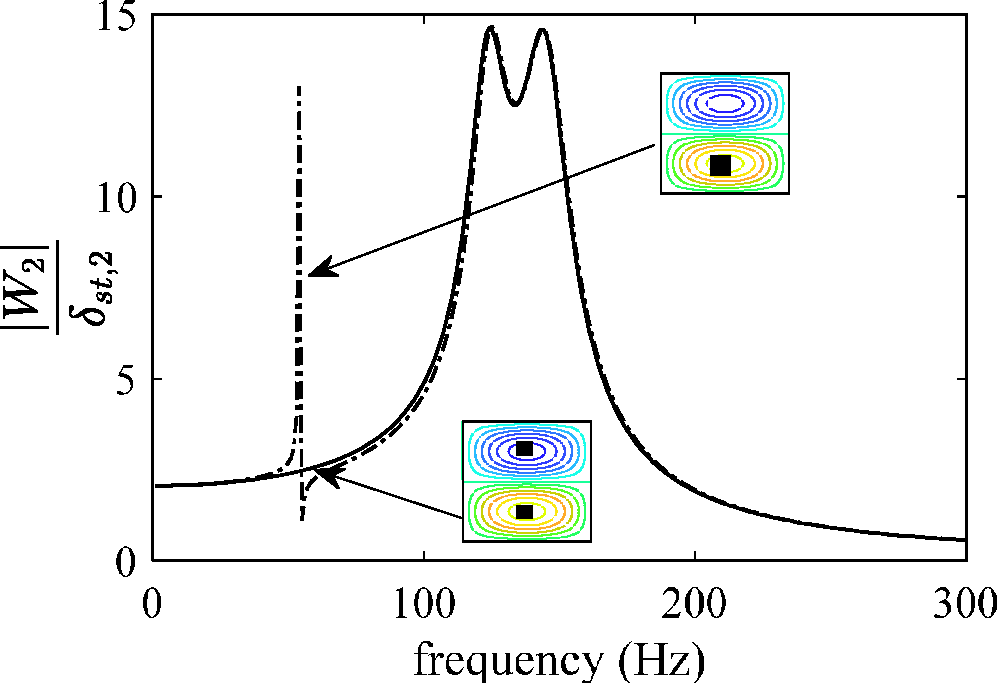
Vibration shapes of the plate and DVAs: (a) the second mode shape of the plate, (b) the vibration shape of the DVAs at 129 Hz, and (c) the vibration shape of the DVAs at 144 Hz.
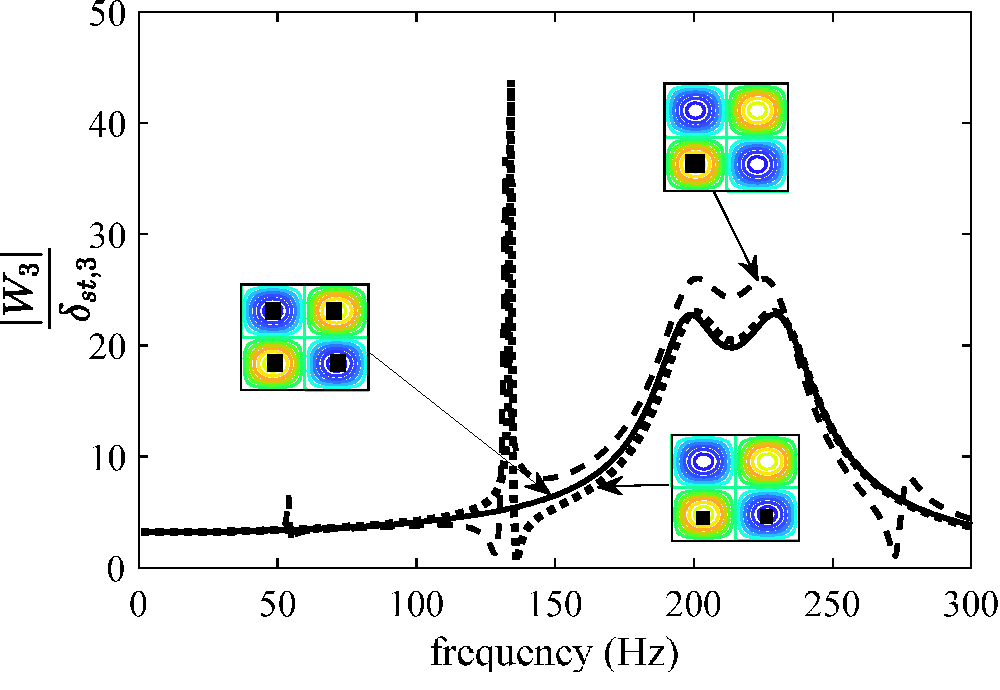
Vibration shapes of the plate and DVAs: (a) the third mode shape of the plate, (b) the vibration shape of the DVAs at 206 Hz, and (c) the vibration shape of the DVAs at 231 Hz. DVA: dynamic vibration absorber.
Optimizations of the distributed DVAs
The jth mode of the plate is considered as the vibration control target. Under the assumption that the vibration of the plate is dominated by the jth mode, equation (7) can be reduced to

Based on the vibration characteristics of the DVAs, the amplitude of the vibration of the DVAs can be written as

Substitution of equation (23) into equation (22) leads to


Defining the following parameters mass ratio forced frequency ratio ratio of natural frequencies static deformation of the plate
The vibration displacement amplitude of the plate can be expressed as


Equation (26) has a same form with the classical vibration displacement amplitude expression of the single DOF system carrying a DVA. Applying the fixed-points theory, the tuned-frequency ratio is given by

The optimal damping ratio of the distributed DVAs is

Numerical results and discussions
Numerical validations of the optimization method
The parameters of the plate are still set as shown in Table 1. According to equations (28) and (29), the tuned-frequency ratio and the optimal damping ratio of the DVAs are
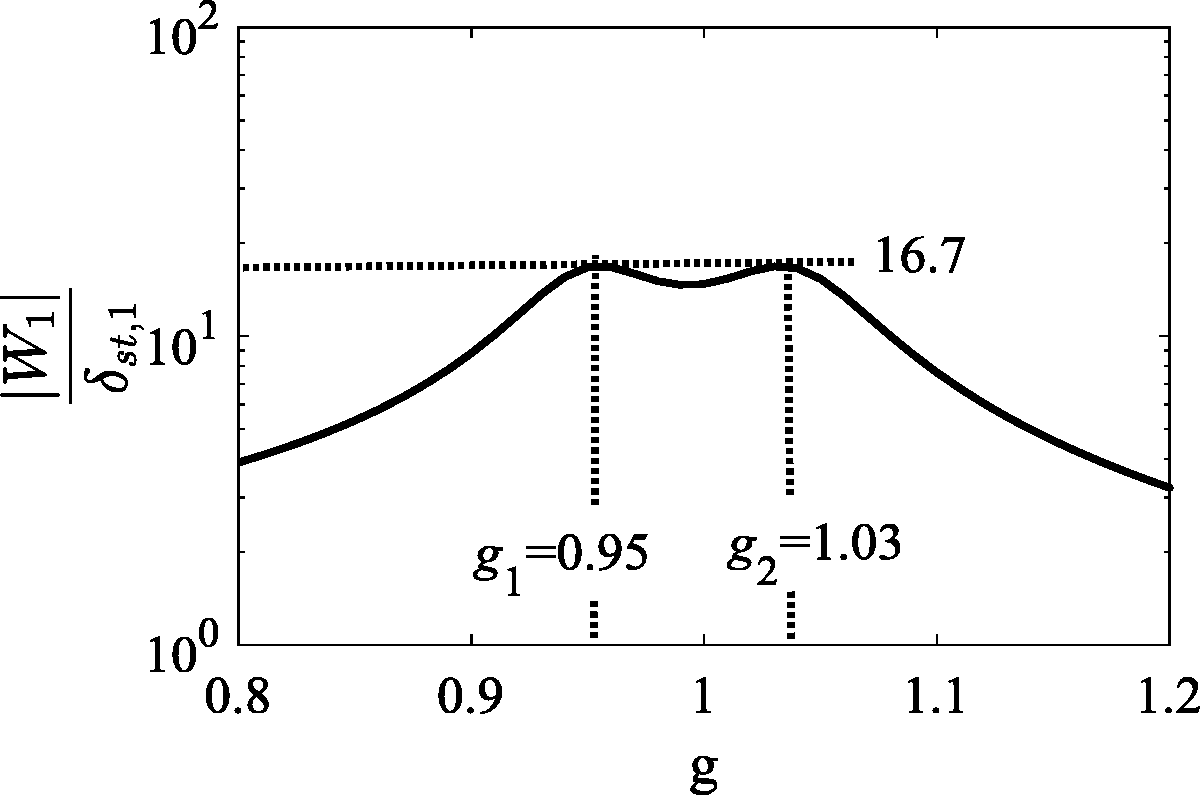
First-order modal vibration response of the plate carrying optimized DVAs with the vibration shape assumption.
The realization of the optimization results in Figure 6 is based on the assumption that the vibration shapes of distributed DVAs are same with the corresponding mode shapes of the plate. Substitution of the optimized parameters into equation (22) leads to the modal vibration displacement of the plate which is shown in Figure 7. It should be noted that Figure 7 shows the vibration response of the plate carrying the truly vibrated DVAs without vibration shapes assumptions. As shown as the solid line in Figure 7, the vibration displacement amplitude reaches to a peak value at resonant frequency
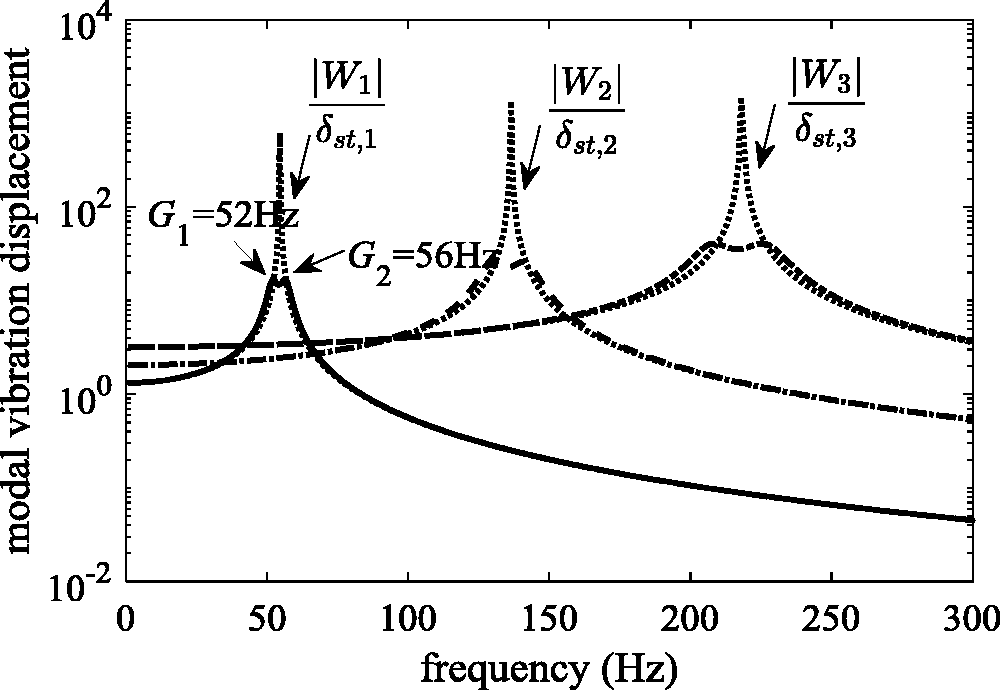
Vibration suppression effect of the optimized DVAs on the first three modes. DVA: dynamic vibration absorber.
The effect of the locations and amounts of the DVAs on the vibration reduction performance
After determining the optimal frequency ratios and damping ratios, the optimal locations and the optimal amounts of the distributed DVAs are still needed to be identified to achieve the optimal vibration suppression effect. Below, the vibration suppression performance of the DVAs which are distributed on the different locations on the plate to control the (1, 1), (1, 2) and (2, 2) mode vibrations are studied, respectively. The vibration suppression effect of the DVAs is shown in Figures 8 to 10, while the different DVAs installation method is also illustrated in each figure.
When the DVAs are designed to suppress the first modal vibration of the plate, three installation methods are studied and the vibration responses of the plate are shown in Figure 8. The thick solid line shows the case that a single DVA of a mass
The first modal vibration response of the plate carrying different positioned DVAs. DVA: dynamic vibration absorber.
As the second mode of the plate has two maximum modal vibration points, two DVAs installation methods are studied when the DVAs are designed to control the second modal vibration of the plate. One of the installation methods is to locate a single DVA of a mass
The second modal vibration response of the plate carrying different positioned DVAs. DVA: dynamic vibration absorber.
When the DVAs are designed to control the third modal vibration of the plate, three DVA installation methods are studied and the vibration suppression effect of the three methods is shown in Figure 10. The total mass of the DVA(s) in each method is set to
The third modal vibration response of the plate carrying different positioned DVAs. DVA: dynamic vibration absorber.
multi-modes vibration control using distributed DVAs
For the primary vibration mode of the plate, a single DVA can be used to achieve an ideal vibration suppression effect. However, multiple DVAs should be distributed on the maximum modal vibration displacement points to achieve the optimal vibration suppression effect for the higher order modes. Through the optimizations of the parameters and the reasonable settings of the distribution locations of the DVAs, a brilliant multi-modes vibration control effect can be realized.
When the first three modes of the rectangular plate in this paper are as the vibration control targets, the distribution of the DVAs is shown in Figure 11. DVA1, DVA2 and DVA3 are attached on the plate to control the vibrations at the first, second and the third natural frequencies, respectively. The plate has two identical modes (1,2) and (2, 1) at the second natural frequency. Respect to this aspect, four identical DVAs (marked as DVA2) are used to control the vibration. The mass ratio of the all DVAs to the plate is set to 0.01. The vibration responses of the plate are shown in Figure 12.
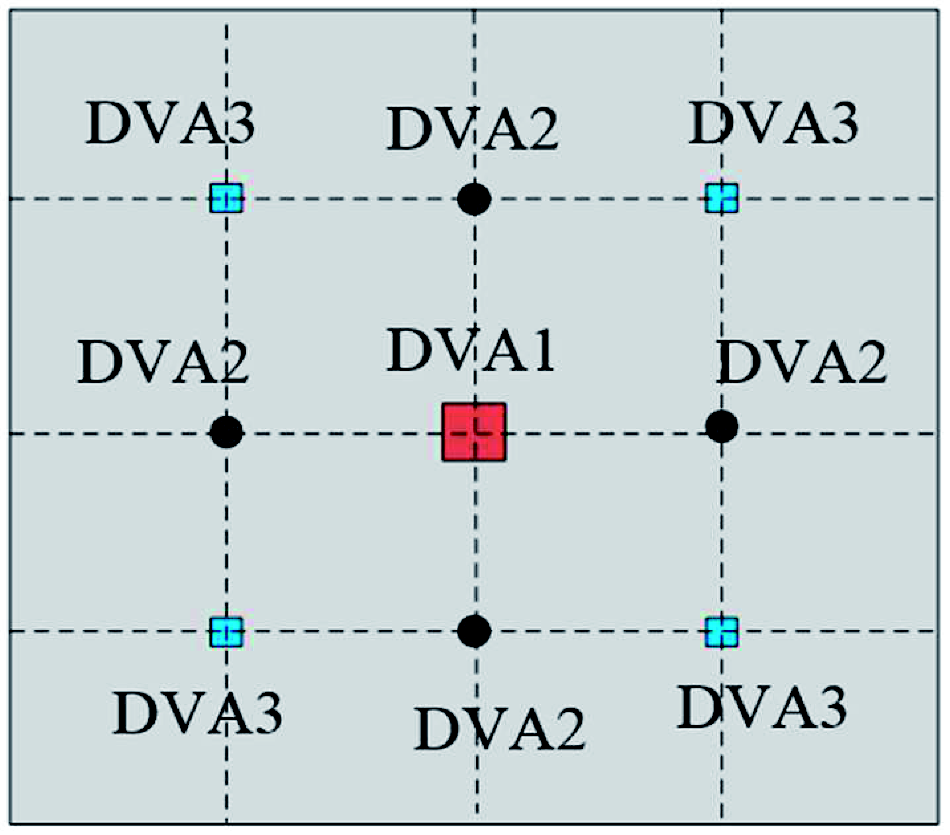
Distribution locations of the DVAs used for multiple modes vibration control (the mass of DVA1 is
Multi-modes vibration control effect of the optimized distributed DVAs. DVA: dynamic vibration absorber.
In Figure 12, the vibration response of the bare plate is plotted as the break line. The vibration suppression result of the distributed DVAs which are optimized by the method proposed in this paper is shown as the solid line. It can be seen that a brilliant multi-modes vibration control effect is realized through using the optimization method given in this paper. The optimization result of the classical optimization method is also calculated which is shown as the dotted line. Since there are no parameters in the classical optimization formulas to consider the locations of the DVA, the vibration suppression effect of the classical optimization method is clearly inferior to the novel method proposed in this paper. The optimization formulas given in this paper will be reduced to be the form of DAYOU’s optimization formulas if the distributed DVAs are reduced to a single DVA. For the optimizations of the distributed DVAs or multiple DVAs, the optimization method proposed in this paper is more applicable.
Conclusions
The optimization method of the distributed DVAs which are used to suppress vibrations of a plate is studied in this paper and the concise optimization formulas are proposed. Equations of motions of a rectangular plate carrying distributed DVAs are established by modal superposition method. The vibration characteristics of the DVAs are analysed by solving the corresponding eigenvalue problems of the vibration equations. The results of the analysis show that the vibration shapes of the distributed DVAs at new resonant frequencies are same as the corresponding mode shapes of the bare plate. Based on the vibration characteristics of the DVAs and under the assumption that the vibration of the plate is dominated by a single mode in a certain band, the original vibration system can be expressed as a two DOF system. Extending the fixed-points theory to the two DOF system, the optimization formulas for the distributed DVAs are derived. By numerical simulations, the correctness of the optimization formulas is verified. The numerical simulations also show that the DVAs should be distributed on the plate to achieve the optimal suppression effect of the higher order modal vibrations. It is worth pointing out that the optimization formulas proposed in this paper are applicable for the DVAs which are arbitrarily distributed on the arbitrarily shaped plate structure.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was fully supported by the National Key R&D Program of China (Grant No. 2017YFB1300600) and the National Natural Science Foundation of China (Grant No. 61304037).