
Abstract
Transverse vibration and stability of deploying rectangular cross-sectional cantilever beam made of functionally graded material are investigated. The functionally graded material beam is assumed to be constructed with ceramics and metal phases, and the corresponding equivalent parameters of functionally graded material are found to continuously vary across the cross-sectional height with a simple power law. The differential equations of motion of deploying functionally graded material cantilever beam are derived by Hamilton’s principle. Based on the assumed modal method, the beam deflection function is expanded into a series, in which each term is expressed to admissible function multiplied by generalized coordinate. The eigenfunctions of cantilever beam in which the length of the beam is time-dependent are chosen as admissible functions. Galerkin method is employed to discretize the differential equation to a set of time-coordinate-dependent ordinary differential equations, and then the eigenvalue problem depending on time is obtained. The deployment motion of beam is considered as a constant speed in this study, and some numerical results, which are variations of tip deflection response and complex frequencies, are obtained. Finally, the effects of gradient index of functionally graded material, deploying speed, initial length and protruded length, the cross-sectional height on dynamical characteristics, and divergence instability of the deploying functionally graded material beam are discussed.
Keywords
Introduction
Axially moving beams appear in various applications such as telescopic robotic manipulators, deployment of flexible antennas or appendages of spacecraft, as well as the rolling process of plates, and so on. Some axially moving beams with fixed boundary conditions slide along the axial direction but do not stretch, so the mass of the systems can be conserved in the fixed domains. Many methods have been used for the analysis of the dynamic behavior and stability of the axially moving beams. Lee et al. 1 formulated the spectral element model for an axially moving Timoshenko beam under a uniform axial tension. Sze et al. 2 employed Galerkin method to discretize the governing equations of an axially moving beam and formulated the incremental harmonic balance method for nonlinear vibration. Cepon and Boltezar 3 applied an approximate Gelerkin finite element method to solve the initial/boundary-value problem of a viscously damped and axially moving beam with pre-tension. An and Su 4 employed the generalized integral transform technique (GITT) to obtain a hybrid analytical-numerical solution for dynamical response of clamped axially moving beams, and discussed the influence of axial translation velocity and flexural stiffness on vibration amplitude and frequency of the beam. Öz et al. 5 used the multiple scales method to investigate the nonlinear vibration and stability of an axially moving beam with time-dependent velocity. Recently, Li et al.6–9 studied the dynamic characteristics of axially moving nanoscale beams, and obtained many meaningful results. Wu et al.,10 Wang et al.,11 and Ma et al.12 studied the vibration and stability of axial motion membrane and plates, respectively.
Some axially moving beams are cantilevered beams where the length of the beams is variable, and so the beams are called deploying beams. In this class of problem, the conservation of mass is not automatically satisfied because the mass either enters or leaves. In order to study the dynamics of the deploying beam, some scholars put forward various modeling methods suitable for this problem, such as Hamilton principle, finite element method, Lagrange and assumed mode methods, etc. The earliest research work in this field was done by Tabarrok et al.
13
in their work, where a dynamics model for deploying beam was established based on Newton’s second law and Lagrange function. Because of the changing length of the beam in deployment, Stylianou et al.
14
put forward the concept of variable region finite element method, and studied the response and stability of an axially moving beam using the finite element method. Fung et al.
15
derived the vibration equation of axially moving beam with a tip mass by Hamilton’s principle, which laid the important foundation for the dynamical analysis of the deploying beam. Gosselin et al.
16
used Newton method to analyze the stability of a deploying/extruding beam with uniform circular cross section, extending axially in a horizontal plane at a known rate, while immersed in an incompressible fluid. In their equations, an “axial added mass coefficient” was implemented in order to better approximate the mass of fluid, which stayed attached to the beam, and the dynamical behaviors of the system was observed for cases of constant extension rate and for a trapezoidal deployment rate profile. Wang and Ni
17
investigated vibration and stability for an axially moving beam in fluid and constrained by simple supports with torsion springs, and analyzed the effects of axially moving speed, axial added mass coefficient, and several other system parameters on the dynamics and instability of the beam. It was shown that when the moving speed exceeds a certain value, the beam is subject to buckling-type instability. Chang et al.
18
employed variable region finite element method to derive the equations of motion of an axially moving beam based on Rayleigh beam theory, and investigated vibration and dynamical stability of the beam with two kinds of axial motion including constant-speed extension deployment and back-forth periodical motion by Runge–Kutta method and Floquet theory. Wang et al.
19
derived the transverse vibration equation of the axially moving cantilever beam with a tip mass by D’Alembert’s principle, and put forward the
For the past few years, functionally graded material (FGM) has been widely used in mechanical and aerospace structures due to its unique superiority of heat resistance, high strength, and light weight. Sui et al. 23 analyzed the transverse vibration characteristics of axially moving FGM beam with simple supports at both ends based on Timoshenko beam theory. For dynamical analysis of deploying cantilever beam made of FGM, there are very few reports on this new research topic. To the best of the authors’ knowledge, the work by Piovan and Sampaio 24 is the first to deal with the deploying beams made of FGM. They studied the vibration of axially moving flexible beams made of FGMs by a finite element scheme, in which a thin-walled beam with annular cross section and a continuously graded variation in the composition of ceramic and metal phases across the wall thickness were considered, and the effects of the beam flexibility, tip mass, and material constituents on the dynamics of the axially moving beams were discussed. However, the deploying FGM cantilever beam with a rectangular cross section was not taken into account in their model.
In the present paper, a study on the vibration and stability of deploying cantilever FGM beam with rectangular cross section are performed. The differential equation of motion of a deploying FGM beam is derived based on Hamilton’s principle, and Galerkin method is employed to discretize the governing differential equation to a set of time coordinate-dependent ordinary differential equations. The effects of gradient index of FGM, deploying speed, initial length, protruded length, and the cross-sectional height on dynamical characteristics and divergence instability of the deploying FGM beam are discussed. The numerical method can be used for the study of this kind of problem, and the research results can be helpful for engineering practical design.
Coupled differential equation of motion
Consider a deploying rectangular cross-sectional cantilever beam made of FGMs. Let the beam be of width
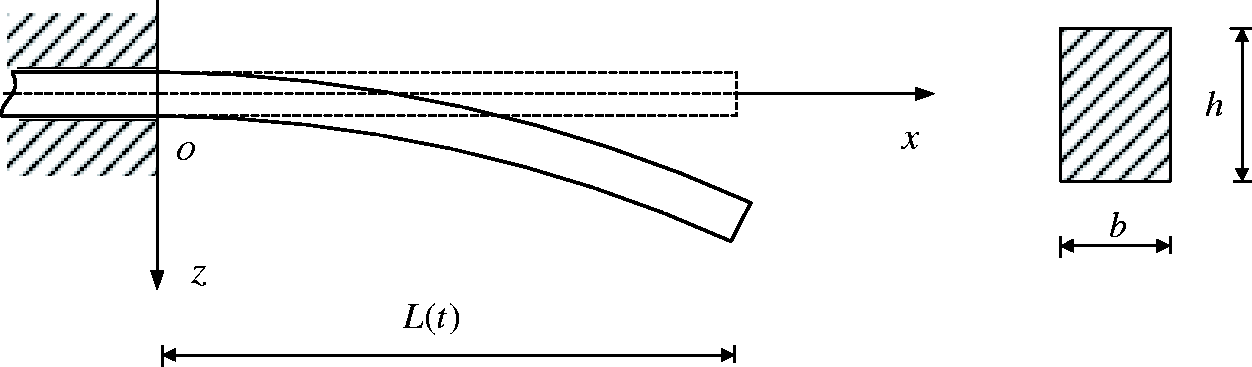
Deploying rectangular cross-sectional cantilever FGM beam and the coordinate system.
In this paper, the FGM is considered to be composed of two materials, such as ceramic and metal, i.e. the upper surface of the beam is metal-rich, and the lower surface is ceramic-rich. The effective material properties of the FGM beam can be expressed as
25

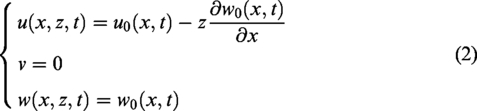
According to the Euler–Bernoulli hypotheses for the FGM beam, the displacement fields take the following forms
The axial strain–displacement component relation and the stress–strain relation for the FGM beam are given by the following expression respectively


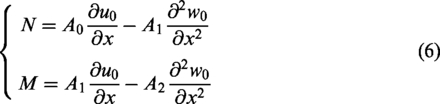
An axial force

Substituting equation (4) into equation (5), the axial force and the bending moment are expressed by displacements as
The strain energy of the system can be described as

The kinetic energy of the system can be expressed as



Substituting equation (9) into equation (8), the kinetic energy of the system is rewritten as

The potential energy due to the axial inertia force can be expressed as
24

Substituting equations (7), (10), and (11) into Hamilton’s principle
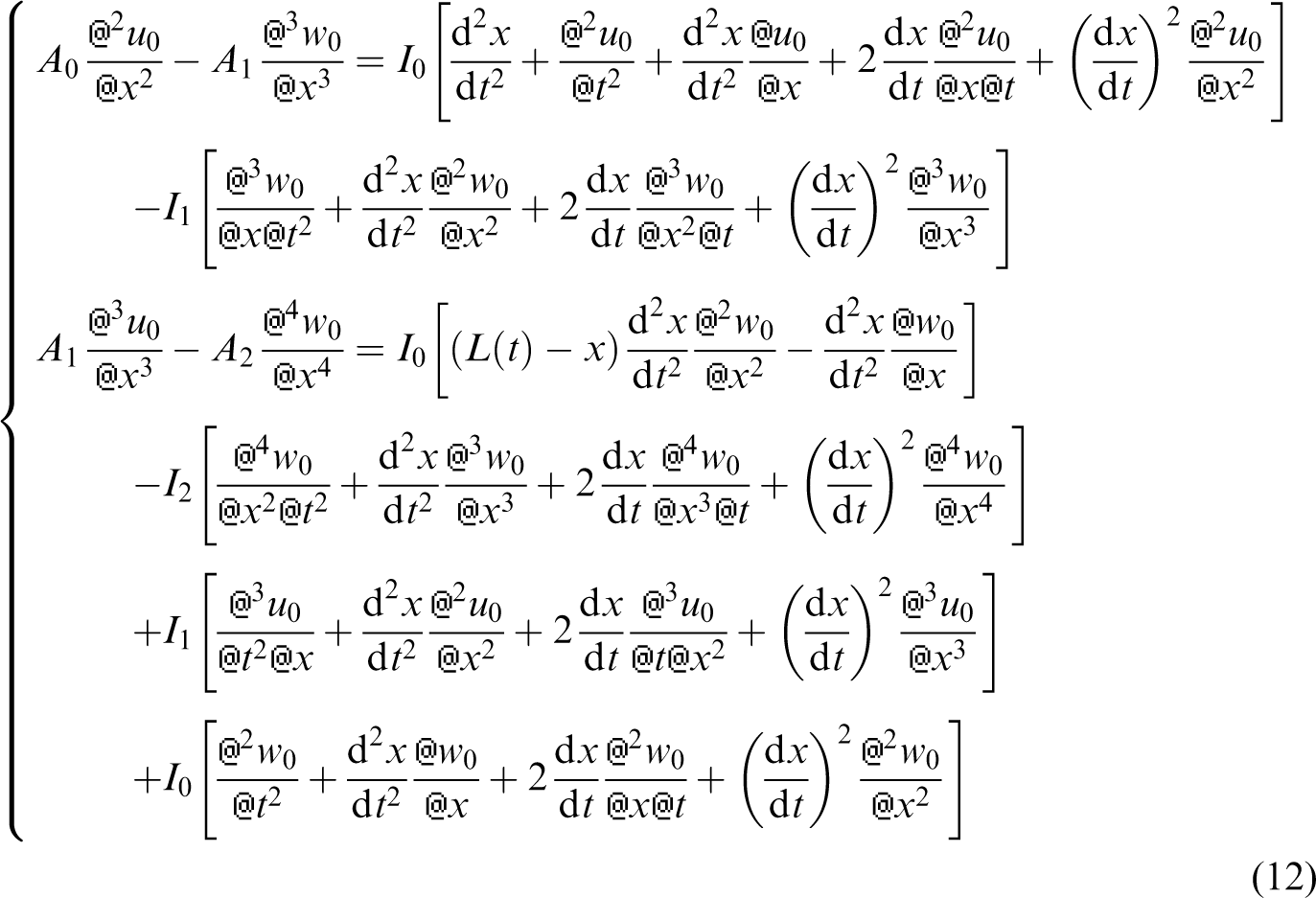
In the following work, the axial displacement
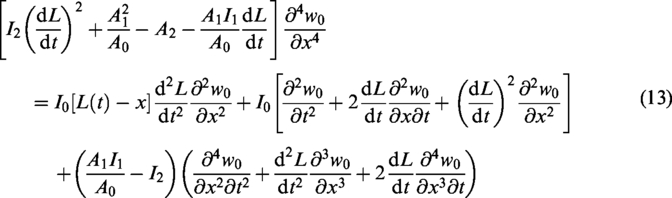
Implementing a derivation with respect to x on both sides of the first equation of equation (12), and substituting it into the second equation of equation (12), a differential equation of motion for the deploying FGM beam can be rewritten as
Discretization of the equation
Based on the assuming modal method, the deflection functions


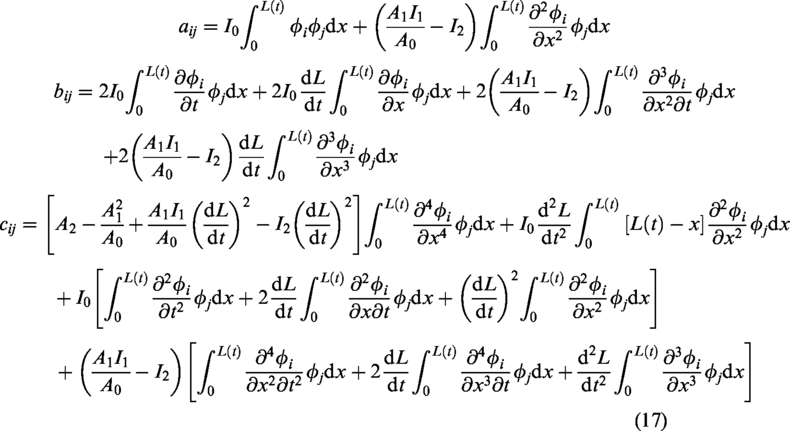
Substituting equation (15) into equation (14), and applying Galerkin’s procedure for equation (13), after some manipulations, one can obtain the second-order ordinary differential equations with time-variable coefficients

Introducing dimensionless coordinates
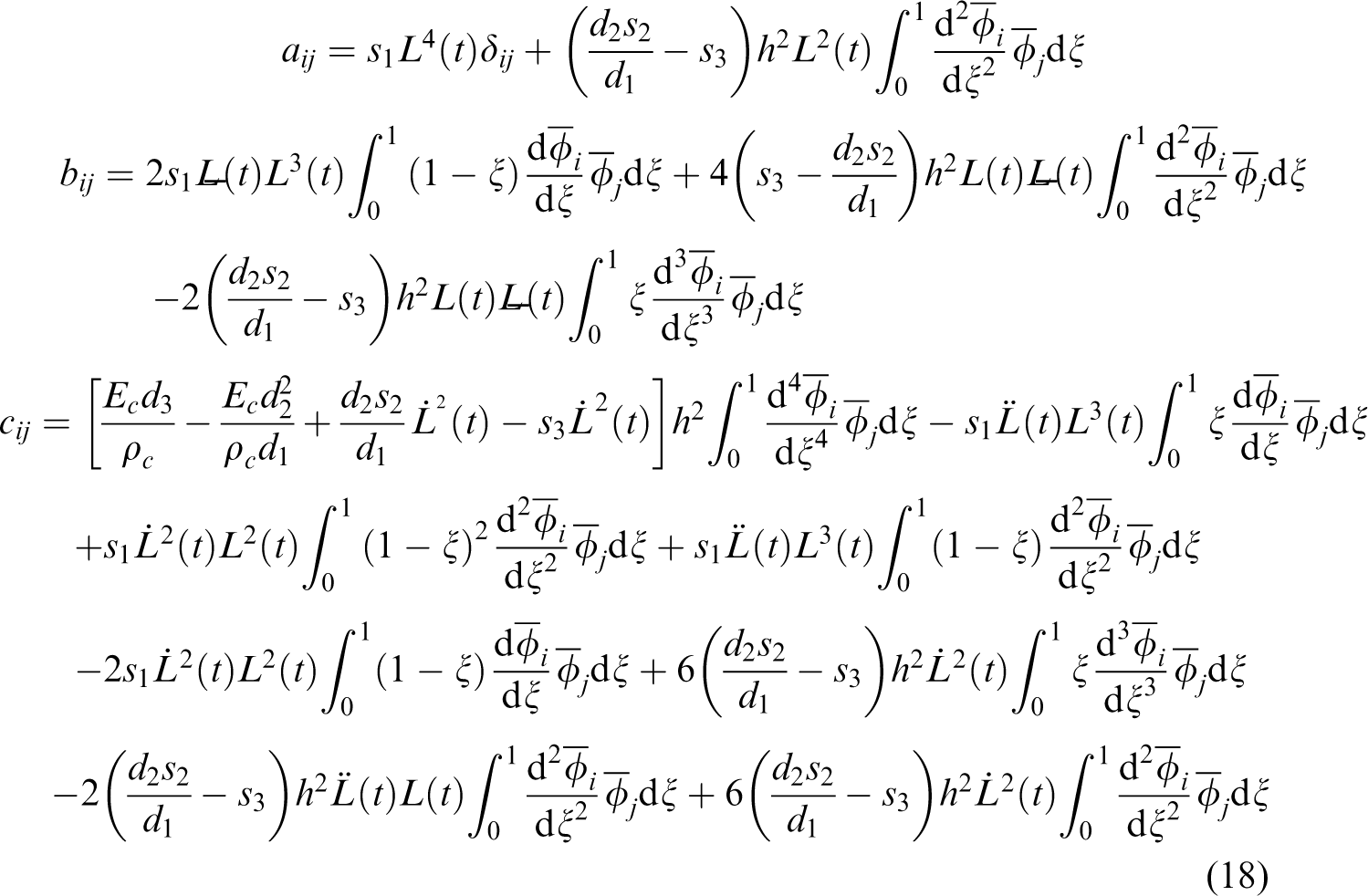

In the above expressions,
Denoting

Denoting


A solution in equation (20) may be taken as

Substituting equation (22) into equation (20) leads to homogeneous linear algebraic equations

Based on the linear algebra theory, the sufficient and necessary conditions of homogeneous linear algebraic equations existing in the nonzero solution are that the determinant of coefficients equals to zero, thus one can arrive at the following generalized complex eigenequation

By solving the generalized complex eigenequation (24), one can obtain the complex frequencies of deploying FGM beam and the type of stability from the signs of the real part and imaginary part. On the other hand, by directly solving equation (20) using Runge–Kutta method, the tip deflection response of deploying FGM beam can also be obtained.
Numerical results and discussion
In this section, the deploying cantilever FGM beam with rectangular cross section is assumed to be made of aluminum and ZrO2 with the following properties:
When the gradient index
The first three dimensionless natural frequencies of cantilever Rayleigh beam.

Dynamical response analyses
The influence of gradient index on the tip deflection response of deploying FGM beam
In the case of
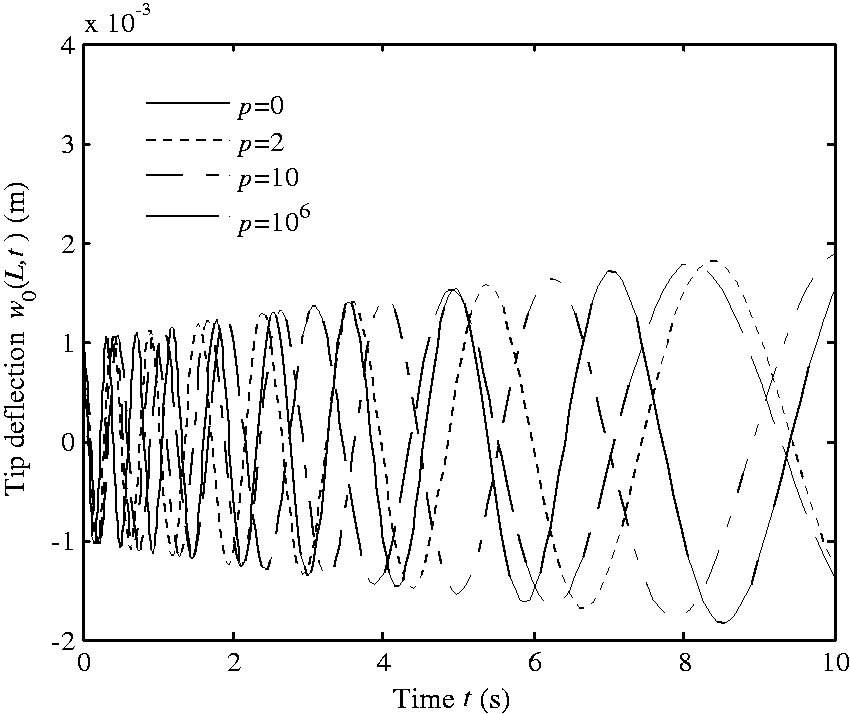
Tip deflection of deploying FGM beam versus time for different gradient indexes (
The influence of deploying speed on the tip deflection response of deploying FGM beam
For the deploying FGM beam with gradient index
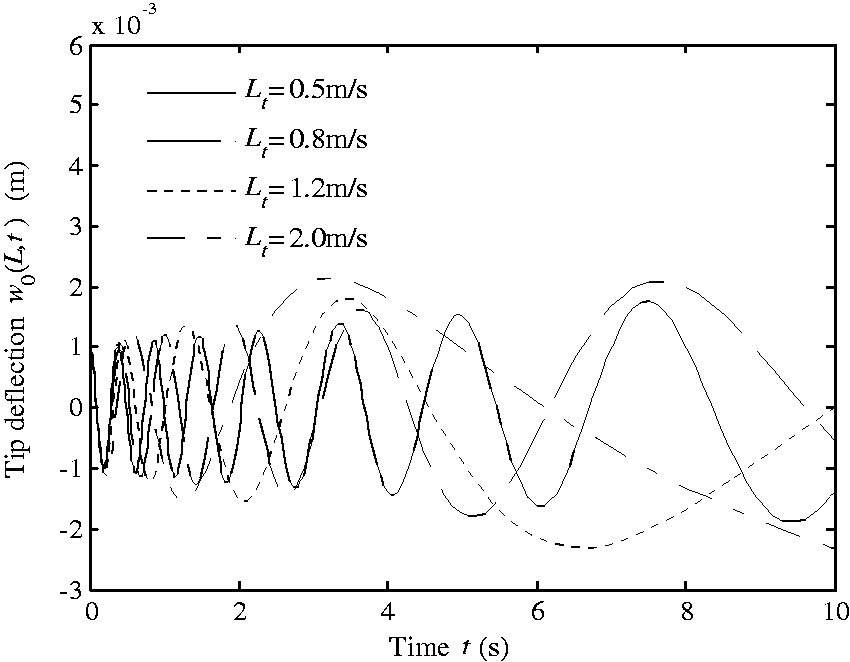
Tip deflection of deploying FGM beam versus time for four different deploying speeds(
It can be seen from Figure 3 that the tip deflection amplitude of deploying FGM beam increases with the increase in the deploying speed, and the beam tends to divergence instability with the increase in the deploying speed. It shows that deploying speed has the most significant influence on the vibration response of the FGM beam.
The influence of initial length on the tip deflection response of deploying FGM beam
For the deploying FGM beam with gradient index
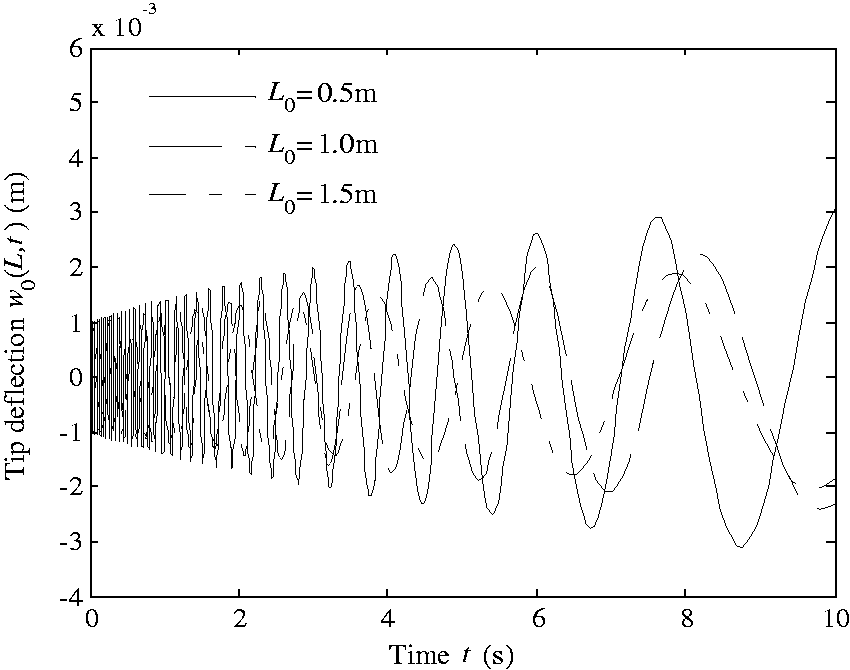
Tip deflection of deploying FGM beam versus time for three different initial lengths (
The influence of the cross-sectional height on the tip deflection response of deploying FGM beam
In the case of
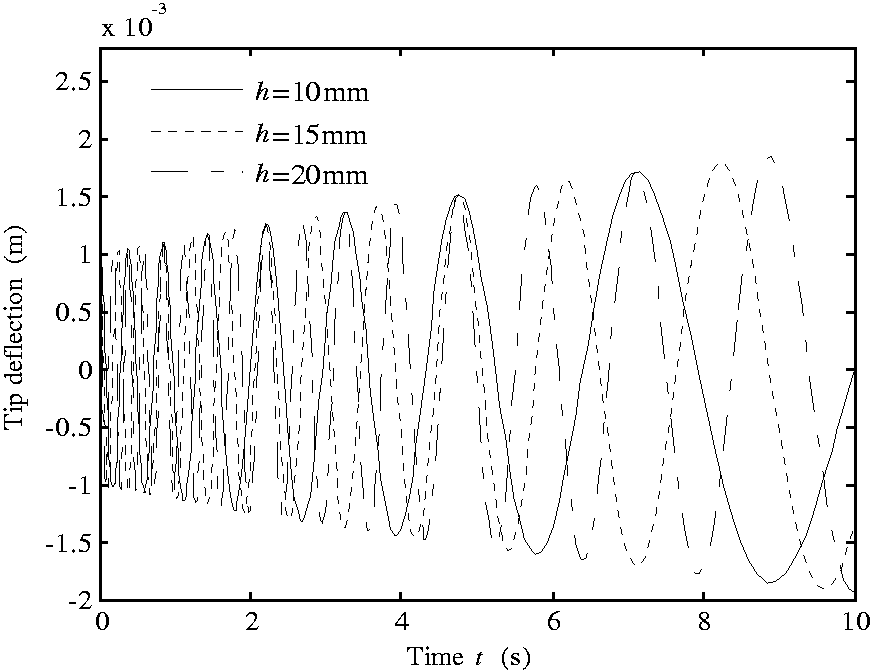
Tip deflection of deploying FGM beam versus time for three different cross-sectional heights (
Stability analyses
For some parameters
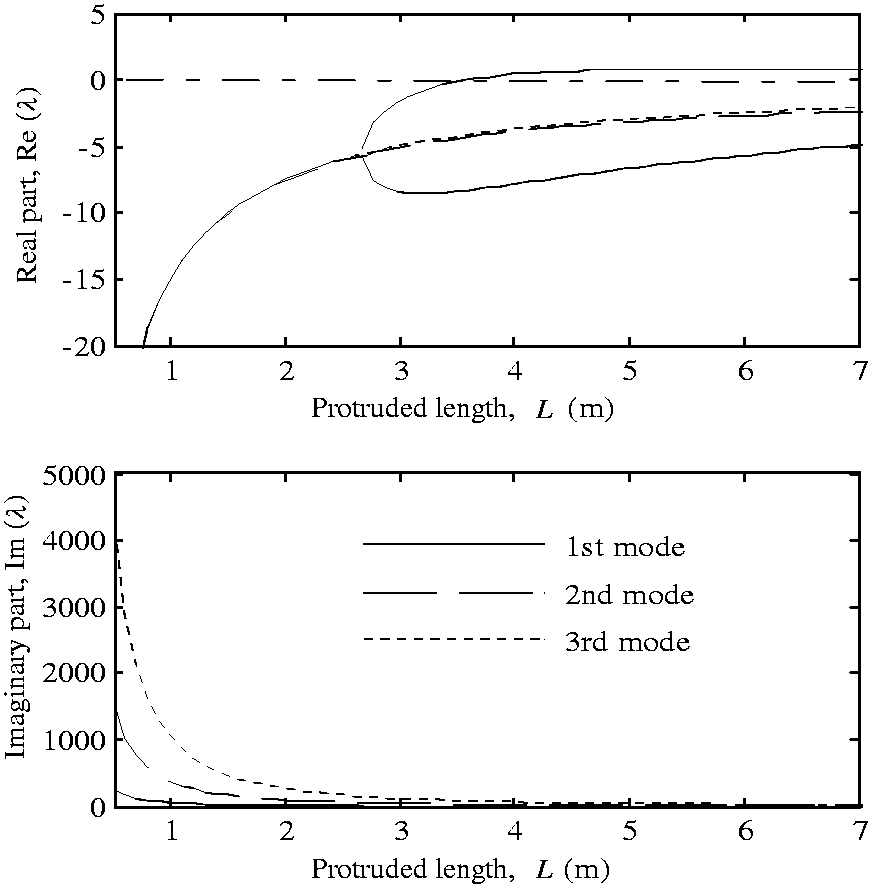
Real part and imaginary part of the first-order three complex frequencies versus the protruded length (
The influence of gradient index on the stability of the deploying FGM beam
For
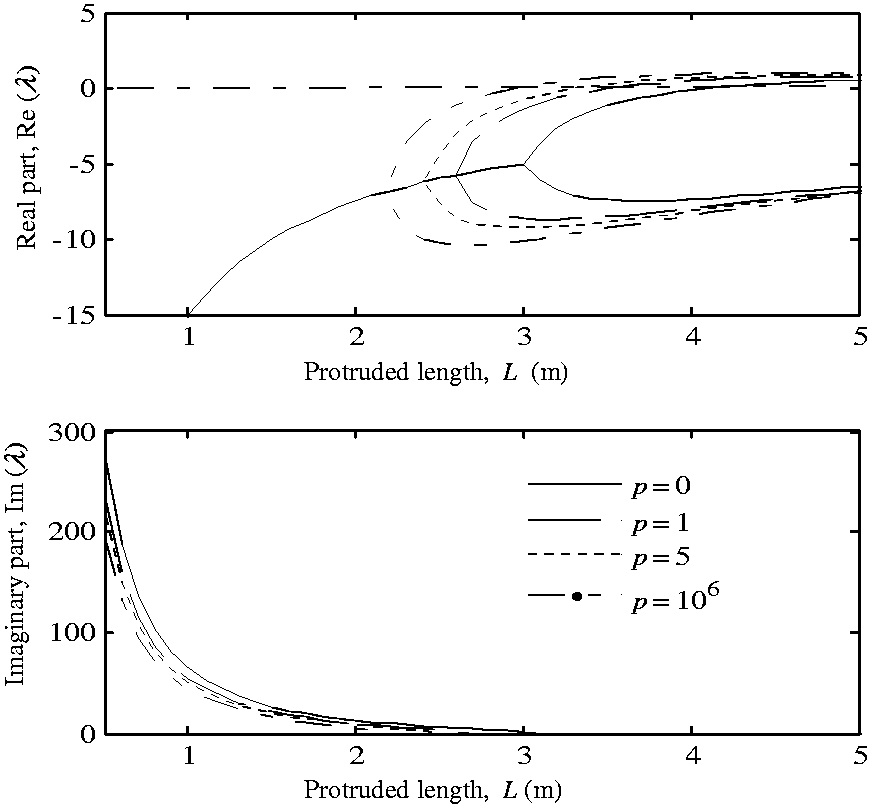
The first-order complex frequencies versus the protruded length for different gradient indexes (
The influence of deploying speed on the stability of the deploying FGM beam
For

The first-order complex frequencies versus the protruded length for different deploying speeds (
The influence of initial length on the stability of the deploying FGM beam
For
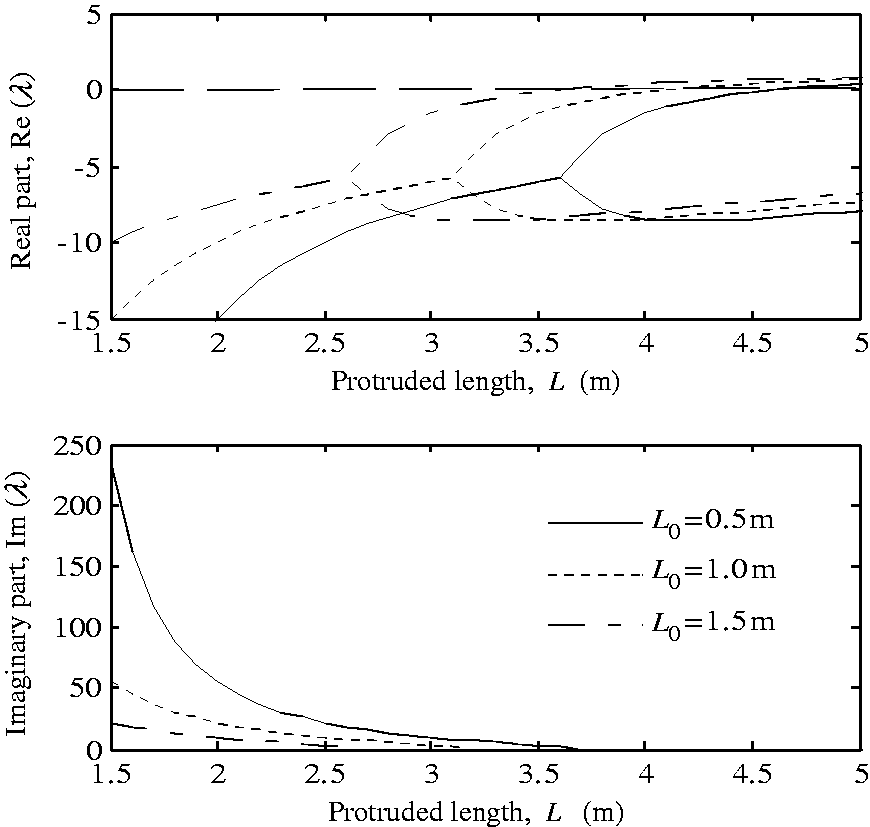
The first-order complex frequencies versus the protruded length for different initial lengths (
The influence of the cross-sectional height on the stability of the deploying FGM beam
For
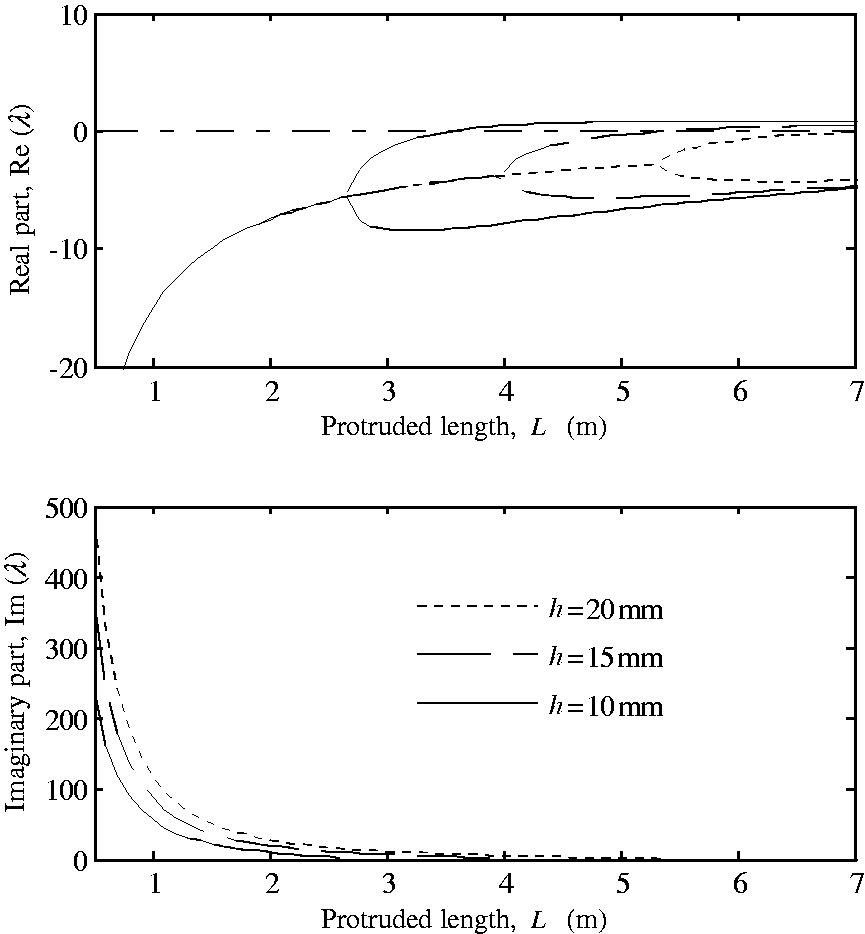
The first-order complex frequencies versus the protruded length for different cross-sectional heights (
Conclusion
In Euler coordinate system, a new coupled dynamic model is developed to study the vibration characteristics and stability of the deploying rectangular cross-section cantilever beam made of FGM, and the coupled differential equations of motion of the system, which includes the axial displacement and transverse displacement that are derived based on Hamilton’s principle. In this model, the corresponding equivalent parameters of FGM continuously vary across the cross-sectional height with a simple power law, where the deploying FGM beam becomes homogenous ceramic or metal beam when gradient index approaches zero or infinity. In view of the complicacy of the equations due to variable length and both coupled displacements, only transverse bending displacement is considered in the equations, which involves the variable coefficients (time variable and coordinate variable) and tension and bend coupling effect. Galerkin’s method is employed to discretize the differential equation of motion to a set of time coordinate-dependent first-order ordinary differential equations with time-variable coefficient. By using Runge–Kutta method and solving the generalized complex eigenequation, the tip deflection response, complex frequencies, and stability of deploying FGM beam can obtained. For the deploying FGM beam with constant speed, the effects of gradient index of FGM, deploying speed, initial length, protruded length, and the cross-sectional height on tip deflection response and stability of deploying FGM beam are discussed. The conclusions are as follows: (1) gradient index has greater influence on the vibration frequency and has less influence on the tip deflection amplitude of deploying FGM beam. Reducing the metal components of the FGM beam, the vibration frequency of the beam will increase, but the stability is better. (2) The deploying speed of the FGM beam has obvious influence on its vibration response and stability. Therefore, to control the stability of the beam, the deploying speed must be controlled firstly. (3) The increase in the initial length of the deploying FGM beam will decrease the vibration frequency and amplitude of the beam, but it will cause divergence instability of the beam. (4) The increase in the cross-sectional height of the deploying FGM beam can cause the vibration frequency to increase, but has little effect on the amplitude. Increasing the cross-sectional height will improve the stability of the beam.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (No. 11472211) and Shaanxi Science and Technology Research Projects (No.2015GY004).