
Abstract
Based on the notions of spectrum sensitivities, proposed by us earlier, we develop a novel optimization approach to deal with robustness in the closed-loop eigenvalues for partial quadratic eigenvalue assignment problem arising in active vibration control. A distinguished feature of this new approach is that the objective function is composed of only the system and the closed-loop feedback matrices. It does not need an explicit knowledge of the eigenvalues and eigenvectors. Furthermore, the approach is applicable to both the state-feedback and derivative feedback designs. These features make the approach viable to design an active vibration controller for practical applications to large real-life structures. A comparative study with existing algorithms and a study on the transient response of a real-life system demonstrate the effectiveness, superiority, and competitiveness of the proposed approach.
Introduction
Vibrating structures, such as bridges, highways, automobiles, air and space crafts, and others, are usually modeled by a system of second-order differential equations generated by finite element discretization of the original distributed parameter systems. Such second-order system is known as the finite element model (FEM) in the vibration literature.1–7 These structures sometimes experience dangerous vibrations caused by resonance when excited by external forces including earthquake, gusty winds, weights of human bodies that may result in partial or complete destruction of the structures. In practice, and very often, such vibrations are controlled by using passive damping forces. Besides being economic to apply it, such an approach has several practical drawbacks: it is ad hoc in nature and is able to control only localized vibrations. On the other hand, the technique of active vibration control (AVC) is scientifically based and can control vibrations globally in a structure if properly implemented.8–13 The most important aspect of the AVC implementation is to effectively and efficiently compute the feedback forces needed to control the measured unwanted vibrations, caused by the resonant frequencies.
Recently, a mathematically elegant approach that reassigns a few resonant eigenvalues to suitably chosen ones while keeping the other large number of them and the associated eigenvectors unchanged has been proposed. This latter approach is known to have the no-spill over property, and the problem of computing the feedback matrices to reassign the unwanted eigenvalues in this way is called partial quadratic eigenvalue problem (PQEVAP). The approach works exclusively in the second-order setting itself and is capable of taking advantages of computationally exploitable inherit structural properties of FEM, such as definiteness, sparsity, bandness, etc. which are assets in large-scale computational settings. Typically, the mass and stiffness matrices are symmetric, the mass matrix is positive diagonal, and the stiffness matrix is three-diagonal and positive definite or semidefinite. The most attractive feature of this approach is that the no-spill over property is guaranteed by means of a mathematical theory. This is in sharp contrast with the standard and obvious solution approach of the PQEVAP by transforming a second-order control system to a standard linear state-space. By doing so, one can clearly make use of the existing excellent numerical methods for eigenvalue assignment problems. 14 However, in this case one needs to deal with a system of dimensions twice that of the original model, which then becomes computationally prohibitive even with a moderate-size model. Note that the FEM models that arise from practical applications, especially in aerospace and space engineering, and power systems control, could be very large, possibly of multimillion degree of freedom, and computational methods for such large-scale matrix computations are not well developed. 15 More importantly, by transforming to a standard state-space linear system, all the exploitable properties of the FEM, as stated above, will be completely destroyed. By transforming it to a generalized state-space system, 15 the symmetry can be preserved but not the definiteness. Furthermore, such generalized transformations give rise to descriptor control problems, and the numerical methods for such control problems, especially for singular and nearly singular and large-scale systems, do not virtually exist. 14
A basic solution of the original PQEVAP that meets with the above practical requirements is originally proposed by Datta et al., 16 in the single input case and then subsequently generalized to the multi-input cases by Datta et al. 17 and Ram and Elhay. 18 For practical effectiveness, it is not enough just to compute a pair of feedback matrices, but they should be computed in such a way that they have norms as small as possible and the closed-loop eigenvalues are as insensitive as possible to small perturbations to the data.19–22 Minimization of feedback norms leads to economic design while the minimization of the closed-loop eigenvalue sensitivity ensures numerical robustness in the control design. While the former is straightforward,19,20 the later poses a difficult computational task, because the major part of the closed-loop eigenvector matrix consists of the large number of eigenvalues and eigenvectors which are not known to the users. In order to overcome these computational difficulties, we propose a novel minimization approach to deal with the robustness issue. It is based on the notions of spectrum sensitivity, introduced earlier by the authors. The distinguished feature of this approach is that the objective function is formulated in such a way that it does not require explicit knowledge of the eigenvalues and eigenvectors. It is composed of only the closed-loop feedback matrices. The gradient formulas are then computed also in terms of the feedback matrices. This feature makes it possible to design robust controllers in a practical way. In this paper, we propose a new optimization algorithm for RPQEVAP for which the objective function is formulated in terms of the closed-loop mass, stiffness, and damping matrices, thus computation of this function and of the associated gradient formula can be performed without explicitly knowing the closed-loop eigenvectors. This objective function depends upon several spectrum sensitivity results which exhibit these eigenvalue sensitivity relations with the closed-loop feedback matrices. The required gradient formulas are derived in the paper in terms of the closed-loop feedback matrices. These new optimization algorithms are obtained for both cases of the state feedback and state-derivative feedback. Numerical examples, both with small and large order matrices, are performed and an experiment to study the transient response of a real-life system is carried out to demonstrate the effectiveness of the proposed approach in both cases of state and velocity feedback. A comparative study with other existing algorithms shows that the robustness achieved by the proposed algorithms is comparable to, and, in some cases, is better than that achieved by algorithms which aim at minimizing the condition number of the closed-loop eigenvector matrix.
Preliminary concepts on second-order systems and the partial quadratic eigenvalue assignment problems (PQEVAPs)
A vibrating structure modeled by a system matrix second-order differential equations has the form




The details on the quadratic eigenvalue problem can be found in Datta.
15
Suppose a control force of the form


Assuming that the state and the velocity vectors


Here, the unknown feedback matrices


PQEVAP and robustness
The PQEVAP is to assign a few eigenvalues of
In the multi-input case, if there exists a feedback pair, then there are infinitely many.
The problems of choosing the feedback matrices with the property that they have minimum feedback norms and that the closed-loop eigenvector matrix is well conditioned are, respectively, called minimum norm and robust PQEVAPs, denoted by MNPQEVAP and RPQEVAP.
Notations
In order to state the solutions of these problems in the next section, let us introduce the following notations:
Note that l and
The PQEVAP and robustness solutions
In this section, we first state a known parametric solution to PQEVAP and then propose a new optimization approach to study its robustness.
A solution to PQEVAP
Construction of Construction of
If




If


Spectrum sensitivity
We define now eight sensitivities related to the perturbations of the sum and the product of the eigenvalues with respect to changes in the system matrices








In the above formulas on the sensitivities, the subscripts s and d stand, respectively, for the state feedback and the derivative feedback, and
Robustness with spectrum sensitivity
Based on the concepts of eigenvalue sensitivities stated above, we now propose to study the robustness issue in PQEVAP by minimizing the following parametric objective functions which are composed of only the closed-loop system and feedback matrices. Each term of the objective functions is intimately related to spectrum sensitivities as justified below.
Minimize

The case of derivative feedback is similar.
Minimize

Note that the first term of equation (25) is related to equations (17) and (18), which concern the sensitivities of the product of the closed-loop eigenvalues with respect to changes in the stiffness and mass matrices. Similarly, the second term of equation (25) relates to the sensitivities of the sum of the closed-loop eigenvalues with respect to damping and mass matrices through equations (19) and (48). Thus, minimization of equation (25) is related to the minimization of the sensitivities of closed-loop eigenvalues. Similar remarks apply to expression (26). The weights
In order to minimize equations (25) and (26), the corresponding gradient functions must be computed. In the following, we show how to do so by stating two propositions. The interested readers are referred to the proof in Appendix 1.
Computations of gradient formulae and the associated robust feedback algorithms
Gradient formula for state-feedback objective function
Proposition 1: Suppose that


Then, the gradient





Robust state-feedback algorithm
Based on the gradient formula obtained above, we now state the following algorithm for robust feedback computation in the state-feedback case as SFRPQEVAP.
Levenberg–Marquardt or other; other, return to Step 2.
Gradient formula for derivative feedback objective function


Then, the gradient




Robust derivative-feedback algorithm
An algorithm for robust feedback computation is now stated below for a solution of RPQEVAP in the derivative feedback case.
Levenberg–Marquardt, or other; return to Step 2;
Numerical experiments and comparisons
In this section, we present the results of the proposed method, comparing them with those of other existing methods. Specifically, the following methods are considered for our comparisons:
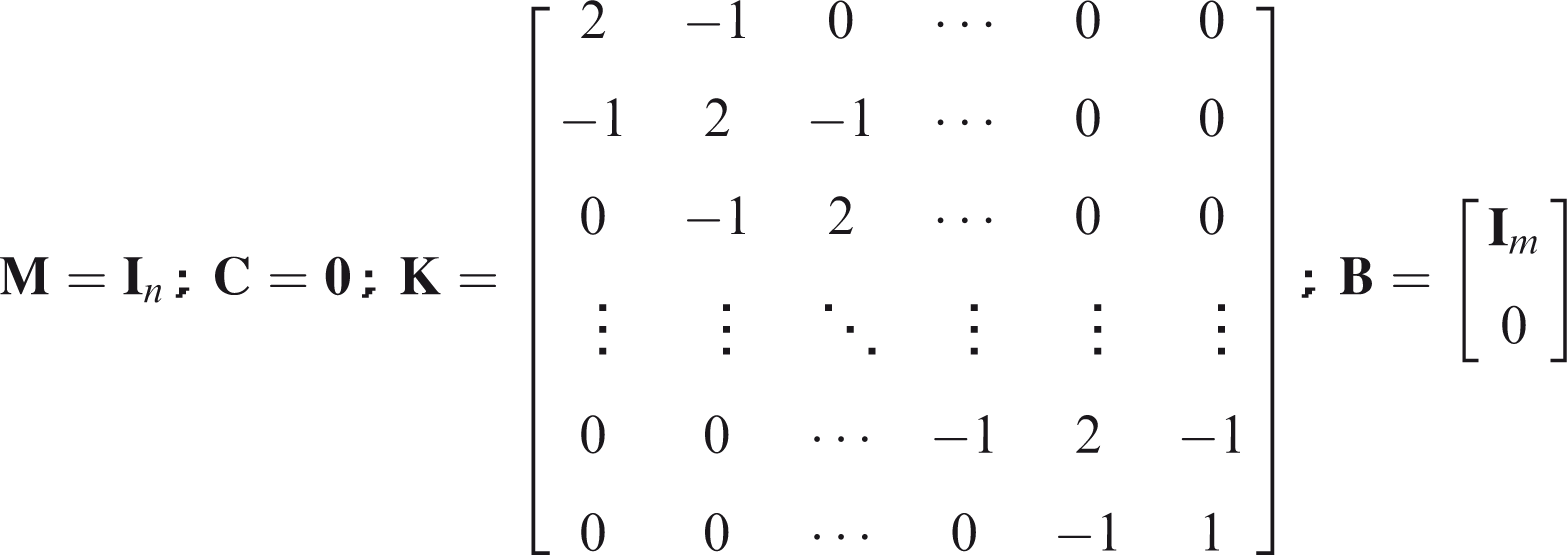
In the first two experiments, the matrices

Let

This quantity is the deviation of the perturbed closed-loop eigenvalues from the unperturbed ones

Experiment I: Random example
In this experiment, we consider a random example of order 5 from MATLAB gallery (“randcorr”, n)

The eigenvalues
The results in Table 1 show that
Comparisons of Methods in a random example.

Experiment II: An example of oil rig
For this experiment, the matrices
Comparison of Methods in an example of oil rig.

Experiment III
The matrices for this experiment were taken from Qian and Xu
27
For this experiment, the eigenvalues 
The weights considered in this case are
As seen from the results of Table 3, the condition numbers for the eigenvector closed-loop matrix for each of the Methods I and II are smaller than that of Method III. The quantity Den for the Method I is comparable with that of Method III, while for Method II it is much better. Figure 1 shows the distribution of reassigned eigenvalues in both cases of the feedbacks.
Condition number and eigenvalue perturbation for the control design in Experiment III.

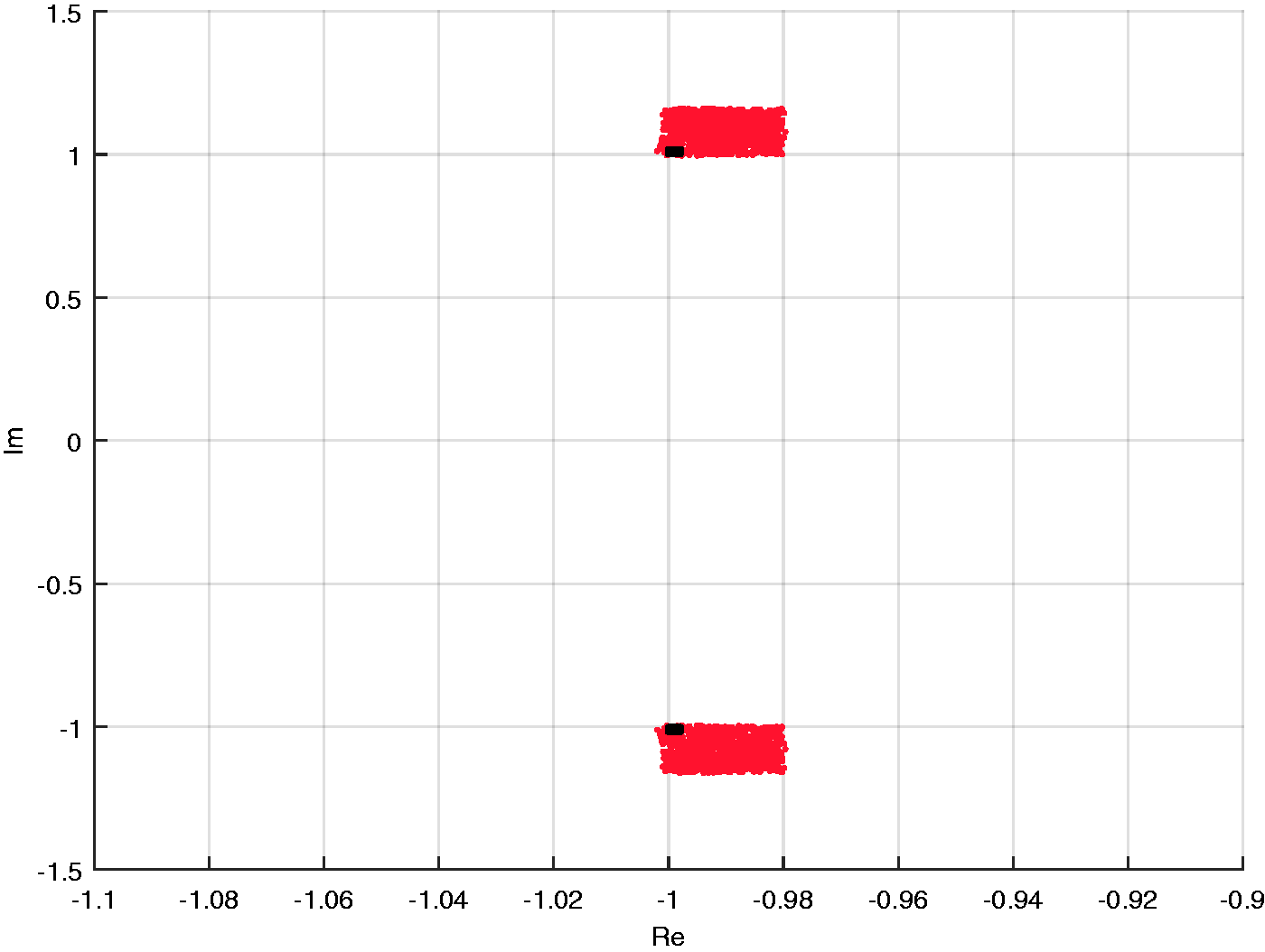
Distribution of the reassigned eigenvalues in Experiment III with state feedback (red) and derivative feedback (black), under linear perturbation in systems matrices of 1%.
Experiment IV on system response—vibration absorber of a machine
In this section, we present the results on system responses of a second-order model representing absorber of a machine, taken from Beards.
28
The matrices 
The natural frequencies of the system are
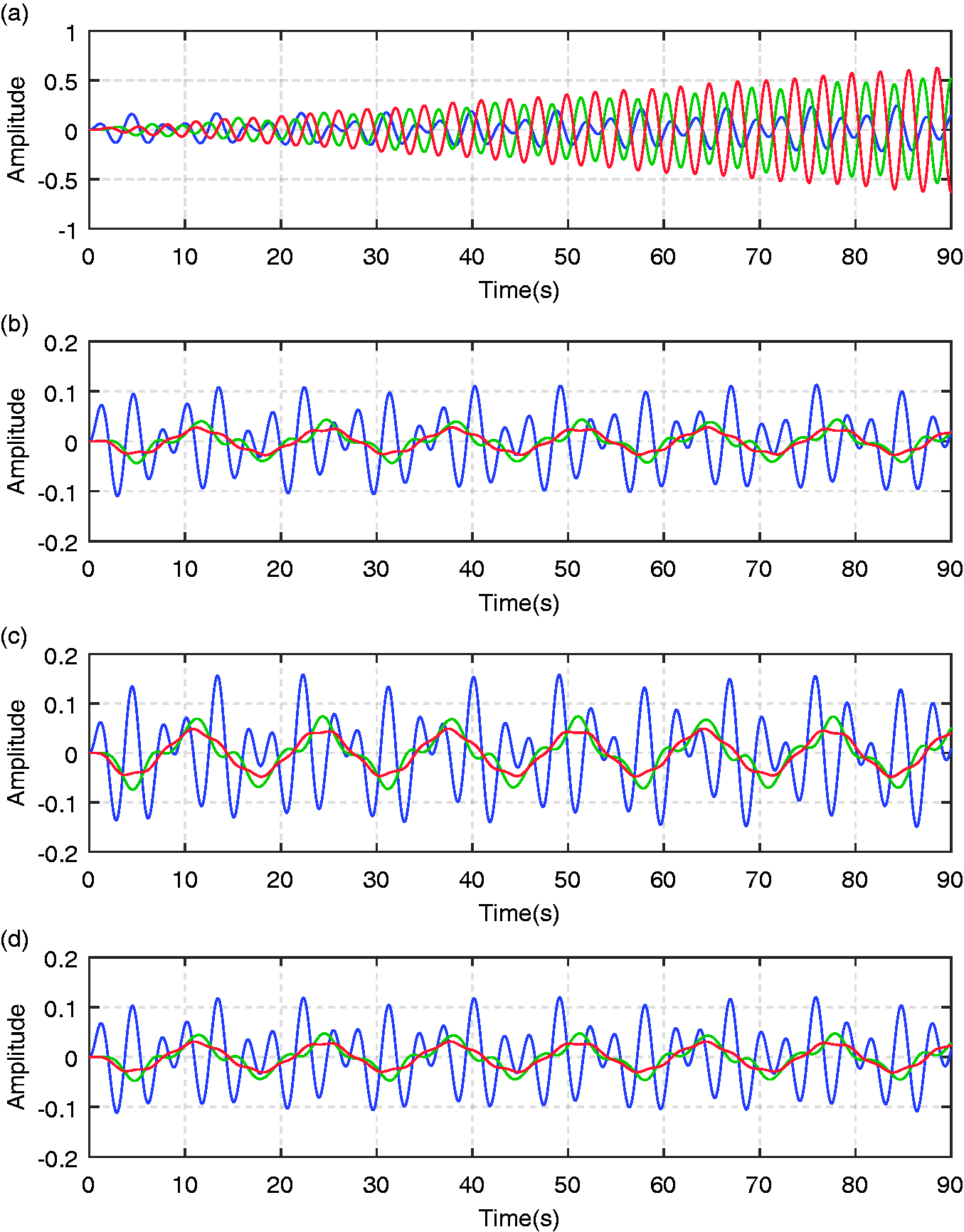
A study of controlling resonant vibrations on vertical (blue lines) and horizontal (red lines) displacements and torsional tilt (green lines) by Methods I, II, and V: (a) Open-loop, (b) closed-loop with Method I, (c) closed-loop with Method II, and (d) closed-loop with Method V.
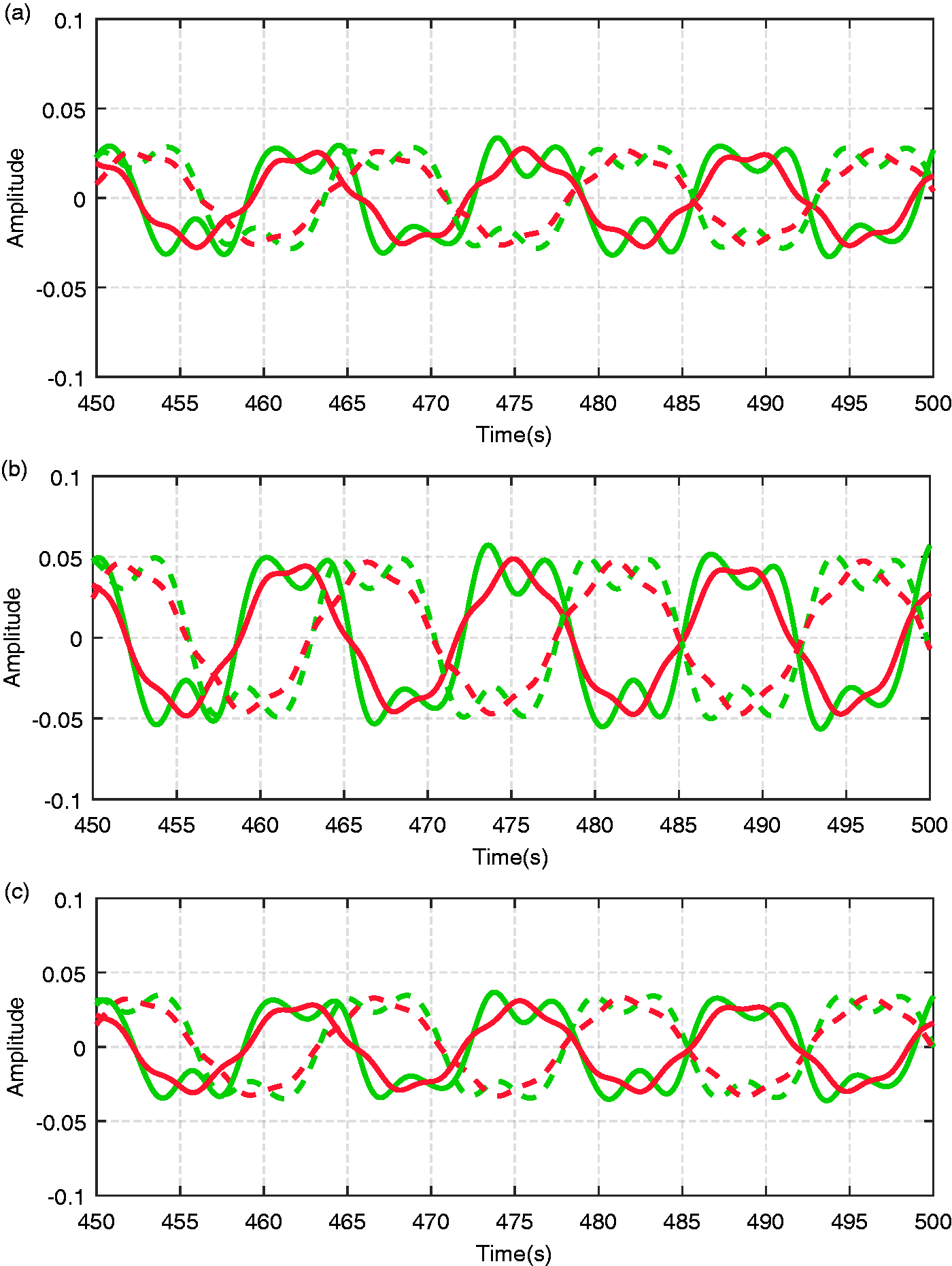
Deviations of the steady-state time domain responses in for horizontal displacement (red lines) and torsional tilt (green lines) under resonant excitation in unperturbed (continuous) and perturbed (dashed) closed-loop system: (a) Method I, (b) Method II, and (c) Method V.
Experiment V: Comparison of the proposed algorithms with a genetic algorithm (GA)
In this section, we compare the proposed algorithms with a GA which is believed to give a global solution to an optimization problem but which is heuristic in nature. The results are displayed in Table 4. Here the superscripts s, d, and GA stand for the respective quantities in cases of state feedback, derivative feedback, and GA. All these three algorithms are applied to the three examples in “Experiment I: Random example,” “Experiment II: An example of oil rig,” and “Experiment III” subsections. It is seen that the results of our algorithm are very close or same as those obtained by GA for Experiment I and Experiment III.
Comparison of the proposed gradient-based Algorithms 1 and 2 against the meta-heuristic GA optimization.
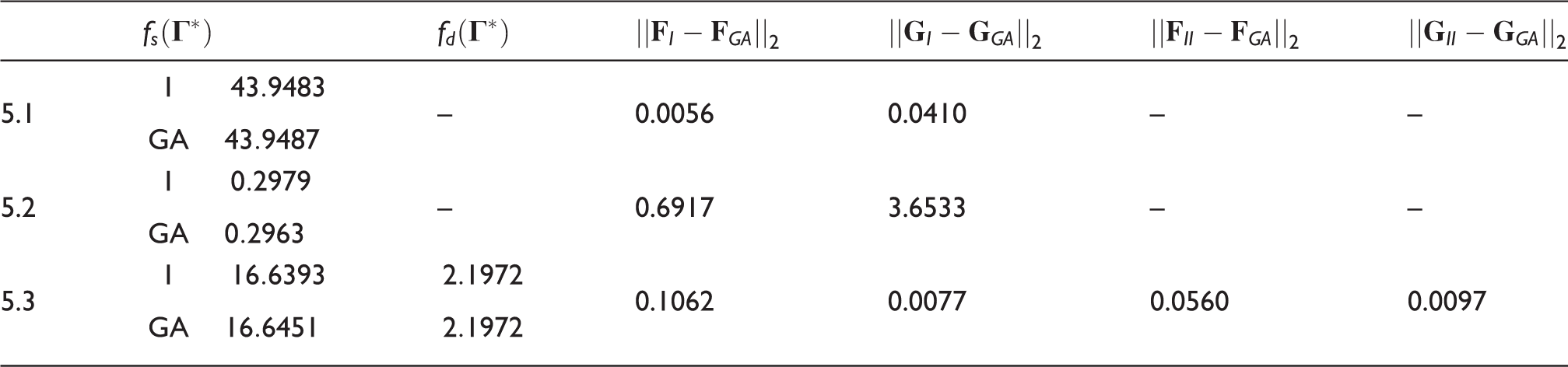
GA: genetic algorithm.
Experiment VI: A study of eigenvector condition number reduction
In this experiment, we evaluate the capability of Algorithm 1 in reducing the closed-loop eigenvector condition number and compare it with the results obtained by Method V. It is to be noted that Method V is designed to minimize the condition number of the closed-loop eigenvector matrix. Here we consider the example from Ram and Elhay
18
and Bai et al.
21
with matrices
We then compute the reduction on the condition number for the methods

Reduction for the condition number and deviation of the eigenvalues for Experiment VI.

Summary and conclusions
A practical aspect of the design of a controller is to ensure robustness in the closed-loop eigenvalues. Mathematically, this is equivalent to minimizing the condition number of the closed-loop eigenvector matrix. The task is computationally prohibitive for the active vibration controller design of a vibrating structure modeled by a system of second-order differential equations, because a major part of the closed-loop eigenvector matrix in this case is not known to the users. We propose an alternative approach to this problem. The approach involves minimizing a cost function that is composed of only the closed-loop system and feedback matrices. Therefore, its implementation does not require the explicit knowledge of eigenvalues and eigenvectors, making the approach practically implementable. Another distinguished feature of the approach is that it works for both state- and velocity-feedback designs. A comparative study of the algorithms based on this proposed approach with the existing algorithms which are especially designed to explicitly minimize the condition number of the closed-loop eigenvector matrix shows that the algorithms are competitive and in some cases give better results. Future research will be directed toward the development of such a strategy for partial eigenstructure assignment in a vibrating system where not only a few eigenvalues are assigned but the associated eigenvectors need to be assigned as well by feedback of different types.
Footnotes
Acknowledgments
The authors would like to thank their institutions for the support.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by Brazilian CAPES Foundation under grants #88881.064972/2014–01.