
Abstract
In this paper, we study universal deformations in anisotropic Cauchy elasticity. We show that the universality constraints of hyperelasticity and Cauchy elasticity for transversely isotropic, orthotropic, and monoclinic solids are equivalent. This implies that for each of these symmetry classes, the universal deformations and the corresponding universal material preferred directions of hyperelastic and Cauchy elastic solids are identical. This is consistent with previous findings for isotropic solids. Universal deformations and material preferred directions are therefore independent of the existence or absence of a strain energy function.
Keywords
1. Introduction
A universal deformation is a deformation that can be maintained in the absence of body forces for every material in a given class. Equivalently, such a deformation can be supported by boundary tractions alone, independently of the specific constitutive equations within that class—for instance, homogeneous compressible isotropic solids or homogeneous anisotropic solids with prescribed symmetry. In nonlinear elasticity, universal deformations have long played an important role both experimentally [1] and theoretically [2, 3].
The concept of universal deformations was introduced by Jerry Ericksen in two seminal papers [4, 5]. In [5], he proved that in homogeneous compressible isotropic solids, all universal deformations must necessarily be homogeneous. His earlier study of incompressible isotropic solids [4] was motivated by Rivlin’s pioneering work on special classes of deformations [6–8]. Ericksen also conjectured that deformations with constant principal invariants must be homogeneous, a conjecture later shown to be false by Fosdick [9]. In fact, the fifth universal family discovered by Singh and Pipkin [10] and Klingbeil and Shield [11] provides examples of inhomogeneous universal deformations with constant principal invariants. Whether further inhomogeneous universal deformations with constant invariants exist remains unknown.
Since Ericksen’s original contributions, the study of universal deformations has been extended to more general settings, including inhomogeneous isotropic elasticity [12], anisotropic elasticity [13, 14], and anelasticity [15, 16]. In the linear theory, the analogue of universal deformations is that of universal displacements [17–20]. In compressible anisotropic linear elasticity, these were classified for all eight symmetry classes in [19], where it was shown that the higher the material symmetry, the larger the space of universal displacements. Thus, isotropic solids admit the largest set of universal displacements, while triclinic solids admit the smallest. This classification was later extended to inhomogeneous solids [20] and to linear anelasticity [21].
More recently, universal deformations have been studied in Cauchy elasticity, a broader framework that contains hyperelasticity as a special case but does not presuppose the existence of an energy function [22–24]. For inhomogeneous isotropic Cauchy elastic solids, it was shown that the sets of universal deformations and universal inhomogeneities coincide with those of Green elasticity [25]. The universal displacements of anisotropic linear Cauchy elastic solids have also been systematically analyzed [26]. Interestingly, despite the greater generality of Cauchy elasticity, for each of the eight symmetry classes, the resulting set of universal displacements is identical to that of linear hyperelasticity.
Universal deformations have also been examined in the setting of implicit elasticity, where constitutive relations take the form
A frequently encountered class of solids with internal constraints in engineering applications is that of compressible materials reinforced by inextensible fibers [31–34]. This idealization models many natural and engineered materials consisting of a soft matrix reinforced by stiff fibers. The literature on universal deformations in such solids is limited. Beskos [35] studied homogeneous compressible isotropic solids with inextensible fibers and showed that certain subsets of Families 1–4 of universal deformations remain universal for specific fiber distributions; all are homogeneous except for the shearing of a circular tube with circumferential fibers. A similar study for incompressible isotropic hyperelastic solids was presented in [36], and universal relations for both classes were discussed in [37]. Beatty [38, 39] identified all fiber distributions in homogeneous compressible isotropic solids with a single family of inextensible fibers for which homogeneous deformations are universal, proving that only three such distributions exist and that in each case the fibers remain straight in both the deformed and reference configurations. In a recent study, universal deformations in compressible isotropic Cauchy elastic solids reinforced with a single family of inextensible fibers were systematically characterized [40]. This work established the first systematic classification of such deformations, thereby extending the classical results of Beskos and Beatty to the broader framework of Cauchy elasticity.
The purpose of the present work is to study universal deformations and universal material-preferred directions in anisotropic Cauchy elasticity. We show that for transversely isotropic, orthotropic, and monoclinic elasticity in both compressible and incompressible cases, the sets of universal deformations and universal material preferred directions coincide exactly with those of the corresponding anisotropic hyperelasticity. This shows that, even within the more general framework of Cauchy elasticity, universality in these classes is governed entirely by material symmetry.
This paper is organized as follows. A concise overview of nonlinear elasticity is presented in section 2. In section3, the equivalence between the universality constraints in hyperelasticity and those in Cauchy elasticity for homogeneous compressible and incompressible isotropic solids is examined. The same problem is addressed for homogeneous compressible and incompressible transversely isotropic solids in section 4, for orthotropic solids in section 5, and for monoclinic solids in section 6. Conclusions are given in section7.
2. Nonlinear elasticity
Within the framework of nonlinear anelasticity, an undeformed body ℬ is identified with a Riemannian manifold

and

where

The Eulerian representation of

Note that

The first and second Piola–Kirchhoff stresses are defined by

where

In components, these read

and

In the absence of body forces, the equilibrium equations in the current configuration are expressed in terms of the Cauchy stress as

where
An anisotropic hyperelastic solid is characterized by an energy function (per unit undeformed volume) that takes the following functional form

where

or

3. Universality constraints in isotropic elasticity
This section serves as a prelude to the subsequent developments. Its purpose is to fix notation and clarify conventions by revisiting and reproving known results for isotropic Cauchy elasticity and hyperelasticity. No new results are claimed here; rather, the presentation is intended to provide a consistent foundation for the analysis that follows.
3.1. Compressible isotropic solids
The Cauchy stress for a compressible isotropic Cauchy elastic solid is represented as [25]

where

in which the following relations have been used

and

From (17)2, it follows that
3.2. Incompressible isotropic solids
As a prelude to our discussion of anisotropic solids, this section examines the equivalence of the universality constraints in Cauchy elasticity and hyperelasticity for homogeneous incompressible isotropic solids. In [25], it was shown that the universal deformations and inhomogeneities of compressible and incompressible isotropic Cauchy elasticity are identical to those of hyperelasticity. Following the same notation defined in [14, 25], we aim to provide an alternative proof of this result in this section.
For incompressible isotropic hyperelastic and Cauchy elastic solids, the Cauchy stress tensor

where p is the Lagrange multiplier corresponding to the incompressibility constraint (
The process of deriving the universality constraints and material preferred directions in hyperelasticity as well as in Cauchy elasticity may be briefly explained as follows. We first substitute the corresponding Cauchy stress into the equilibrium equations (10) to obtain

in hyperelasticity, and

in Cauchy elasticity. The integrability conditions for the existence of p are

while in Cauchy elasticity, it takes the following form

where
For isotropic hyperelastic solids [13, 14, 25]
where
We know that
and
Concerning the nine terms in hyperelasticity, we clearly have the following relations
Ericksen [4] showed that if
where
Now consider

The right-hand side of (28) is symmetric either when

or

where ≡ indicates the symmetry equivalence between the two terms which is defined as follows:
With respect to (27)1 and (27)3, the term

Since

Using the same procedure, one can represent the symmetry of

Thus,

which means that at least one of the six symmetry constraints of the terms (24) depends on the others. Hence, we have at most five independent symmetry constraints in Cauchy elasticity (
Consequently, these two sets of five universality constraints are equivalent. In conclusion, the universality constraints for homogeneous incompressible isotropic Cauchy elastic solids are the same as those in hyperelasticity as was shown in [25].
It is worth noting that the relations (35) follow directly from (26)1–(26)5. This is simply because if
4. Universality constraints in transversely isotropic elasticity
A transversely isotropic solid is characterized at each point by a single material preferred direction, oriented normal to the local plane of isotropy. The material preferred direction is defined by a unit vector

For homogeneous transversely isotropic hyperelastic solids, the second Piola–Kirchhoff stress is given by [14]

The Cauchy stress is written as [13, 14]

where

where
In transversely isotropic Cauchy elasticity, the second Piola–Kirchhoff stress is represented in [24, 42–44]

and thus, the Cauchy stress is written as

where
For homogeneous incompressible transversely isotropic solids, one has

where

which has components

Similarly, by taking

where

where
4.1. Compressible transversely isotropic solids
For homogeneous compressible transversely isotropic Cauchy elastic solids, the Cauchy stress (41) in components reads

where
Since
where
4.2. Incompressible transversely isotropic solids
The method used to obtain the universality constraints for incompressible transversely isotropic solids follows exactly the same steps as those described in section 3.2 for incompressible isotropic solids: we first substitute the two expressions for the Cauchy stress, given by (43) and (46) for hyperelastic and Cauchy elastic solids, respectively, into the equilibrium equations (10) to determine

in hyperelasticity, and

in Cauchy elasticity. Recall that in both cases, the integrability condition for the existence of p requires
In hyperelasticity,
and
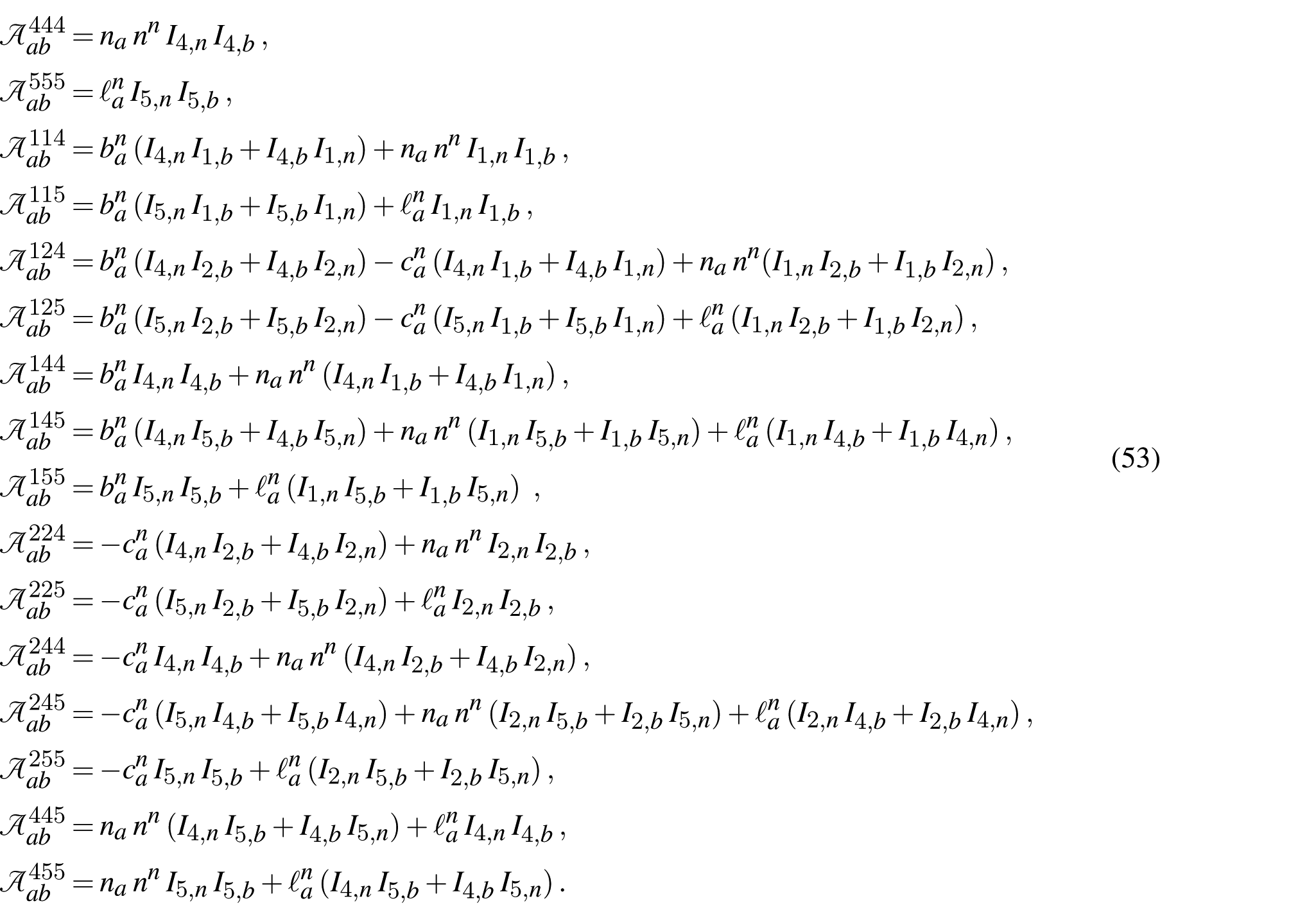
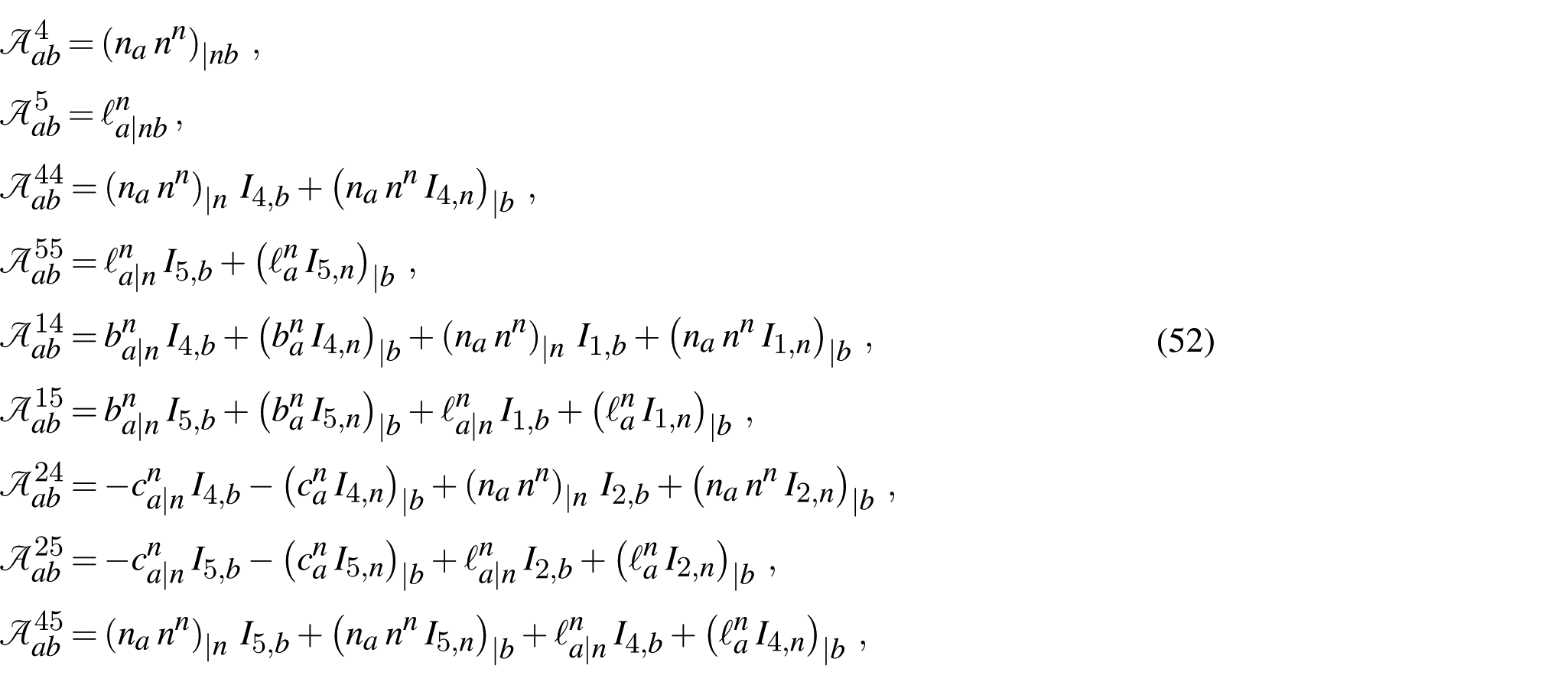
In Cauchy elasticity,

where

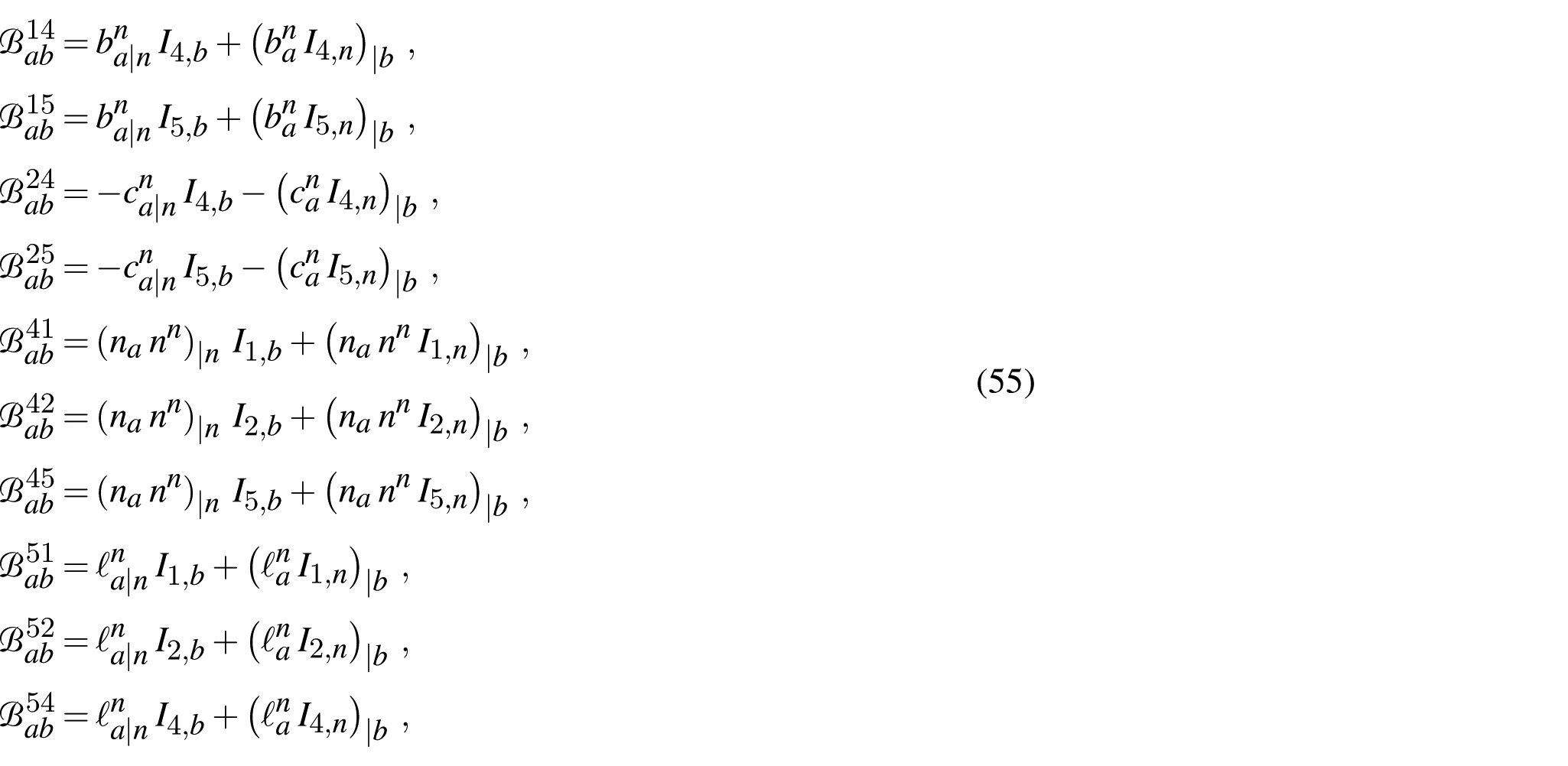
and
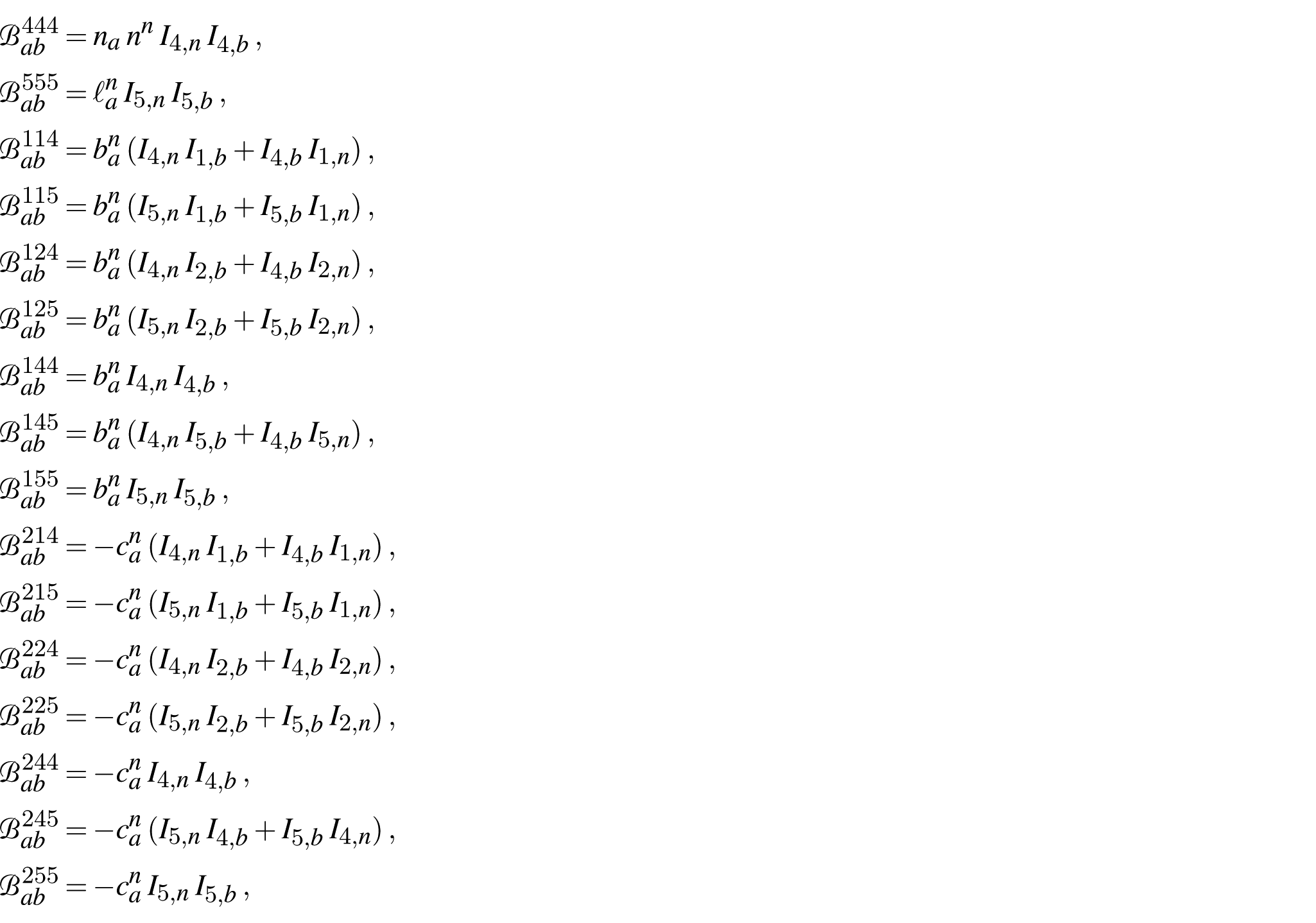
Moreover, there are 15 additional terms in Cauchy elasticity which are associated with the coefficients of

Let us write the relations between the symmetry constraints
and

Therefore, there are a total of 75 universality constraints in Cauchy elasticity, compared to 34 in hyperelasticity. In what follows, we will prove that the universality constraints in transversely isotropic Cauchy elasticity and hyperelasticity are equivalent. Note that
One of the common constraints is

where

where

in which
4.2.1. Case 1:
and
are parallel
Let us assume that

If the symmetric term

The symmetry of (64) implies that

which leads to

Equation (66) holds if either

or

where

Again, omitting the symmetric term

Therefore, if

where

After ignoring the symmetric term, the symmetry of (72)1 gives the following relation

where

Equation (74) can be rewritten in a simplified form as follows

Thus, the symmetry of
Similarly, the symmetries of
Recall that

which after neglecting the symmetric term simplifies to

Since

Similarly, we again consider (61) to rewrite

Since the first term on the right-hand side of (79) is symmetric and

Proceeding with the same approach leads to the following results

which is equivalent to saying that
Since


With the given relations, it is straightforward to show that
In conclusion, the symmetry constraints associated with the terms

Using (61), the above expression simplifies to read

Because the terms

Hence

or

The symmetry of (89) is represented as follows

which can be written in a more simplified form as

Equation (91) suggests that

where

From (92), we have

Substituting (94) into (93) and taking

which is clearly symmetric. This means that if

Similarly

Moreover, we may use (82) to rewrite

which is simplified as

Following an approach similar to that used in (86)–(91), one can show that the symmetry of

and that the following symmetry equivalence also holds

where

Due to the functional dependence of

The following results can be obtained in a similar manner

With respect to (82),

which can be further simplified to

or

Given that

Now, let us use the relation (83) to write

We can perform a similar manipulation for

Hence,

and similarly

Therefore, although this part involves 16 universality constraints in Cauchy elasticity, only six of them, namely those associated with the symmetries of the terms

and hence, there are six independent symmetry constraints in hyperelasticity in this case.
In conclusion, in Case 1, the symmetries of the terms

we only need to prove that the symmetry of the remaining term in Cauchy elasticity, i.e.,

which is expanded as

Because the term

Taking (82) into account, we know that the term

To prove the symmetry of (118), it is enough to show that

Since
So far, we have assumed that
and accordingly,
while the remaining symmetry relations remain valid, thereby preserving the equivalence.
In summary, for incompressible transversely isotropic solids in Case 1 (when
4.2.2. Case 2:
and
are orthogonal
As discussed earlier, the symmetries of the terms

which is symmetric only when

or

where

which is symmetric when

which tells us that either
Now consider

The symmetry constraint associated with (127) has two solutions: (1)

are symmetric. Therefore, we have

Proceeding further and with reference to (27)2, the terms

Regarding (130)1, the constraint

where

Following the same approach, one can show that

which are equivalent to the functional dependence of the pairs
To complete this discussion, we need to investigate the additional terms in Cauchy elasticity, i.e.,

which according to the orthogonality of

Consequently, with reference to (57)6–(57)15, we see that the additional symmetry constraint terms vanish and do not impose further constraints beyond the existing ones. Therefore,
Finally, it is worth noting that by following the same calculation as used in (135), one also obtains

Since
Subsequently, with reference to (58)5–(58)9, the following relations hold between the hyperelasticity and the Cauchy elasticity constraints
Thus, in hyperelasticity, there are six independent symmetry constraints namely
Because

Concerning (57)1–(57)5, it follows that
As outlined previously, in addition to Case 1 and Case 2, there remains one other possibility to be addressed. This possibility indicates that
In summary, we have proved the following result.
5. Universality constraints in orthotropic elasticity
At each point in the reference configuration, an orthotropic solid exhibits reflection symmetry with respect to three mutually perpendicular planes. Accordingly, the orthotropic directions at a point

For orthotropic hyperelastic solids, the second Piola–Kirchhoff stress and the Cauchy stress are given, respectively, by [13, 14]

and
where

where
For orthotropic Cauchy elastic solids, we have the following representation for the second Piola–Kirchhoff stress tensor [24]

where

where
The second Piola–Kirchhoff stress tensor for incompressible orthotropic hyperelastic solids is represented as [13, 14]

where

In components, it is written as

where

where

where
5.1. Compressible orthotropic solids
Let us write the Cauchy stress (146) in components as

where

where
The constraints (154)1–(154)12 coincide with those obtained for homogeneous compressible orthotropic hyperelastic solids [13, 14]. Thus, to prove that the universality constraints in Cauchy elasticity and hyperelasticity are equivalent, it is sufficient to show that the extra constraints in Cauchy elasticity, i.e., (154)13–(154)16, are trivially satisfied.
Considering (154)6, one concludes that

Hence, the extra constraints in Cauchy elasticity are satisfied identically. In summary, we have proved the following result.
5.2. Incompressible orthotropic solids
The derivation of the universality constraints for incompressible orthotropic solids proceeds in precisely the same manner as that employed for incompressible isotropic solids (see section 3.2) and transversely isotropic solids (see section 4.2): the corresponding Cauchy stress tensors, given in (148) for hyperelastic solids and in (151) for Cauchy elastic solids, are substituted into the equilibrium equations (10) to determine

for hyperelastic solids, and

for Cauchy elastic solids. Upon imposing the integrability condition
In hyperelasticity, we obtain

Recall that
The nine terms that already appear in the isotropic hyperelastic case:

25 terms associated with

25 terms associated with

24 terms corresponding to coupling of

The terms
Let
We first represent the terms
and
where
In Cauchy elasticity,

where
and
where

and
In what follows, the symmetry equivalence between the terms in hyperelasticity given in (163) and (164) and those in Cauchy elasticity represented by (166) and (167) for the two possible cases is examined separately.
5.2.1. Case 1:
and
are mutually parallel and orthogonal to
This section discusses the equivalence between the symmetry constraint terms in hyperelasticity and those in Cauchy elasticity, when
We first investigate the symmetry equivalence between the terms

or equivalently

Besides, owing to the orthogonality of

The remaining terms in Cauchy elasticity are in one-to-one correspondence with those in hyperelasticity, as represented in (169). It remains to show that the symmetries of the extra terms in Cauchy elasticity, namely
which are symmetric because

It follows that

and thus, the additional Cauchy elasticity terms introduce no new constraints. Consequently, in this case, the symmetry of the term
We next discuss the symmetry equivalence between the terms (163) and (166) (i.e.,

Expanding the right-hand side of (176) and omitting the symmetric terms

Referring to (89), which provides an equivalent expression for

Similarly, we have

We can also use (82) and

which is further simplified to read

By applying (100) which is obtained from the symmetry of

which is evidently symmetric. Thus

Using the same approach, the following symmetry equivalences are established:

From (168), (178), (179), (183), and (184)1, one deduces that

We know that the terms

To complete the proof of the symmetry equivalence between the Cauchy elasticity terms and the hyperelasticity terms in this case, we need to show that the remaining terms in Cauchy elasticity, including
5.2.2. Case 2:
and
are orthogonal to
In this case, both

In view of the above relations, most of the hyperelasticity and Cauchy elasticity terms in (163), (164), (166), and (167) are identically zero. The remaining terms are related as follows (see (168) and (169))
In this case,

Thus, the symmetry constraint terms in Cauchy elasticity correspond one to one with those in hyperelasticity in this case, showing that the two sets of constraints are equivalent.
We showed that for incompressible orthotropic solids, the symmetries of the terms corresponding to the coupling of
6. Universality constraints in monoclinic elasticity
The material symmetry of a monoclinic solid is characterized by three unit vectors

where

Note that
where

where
Referring to [24], the second Piola–Kirchhoff stress tensor for monoclinic Cauchy elastic solids has the following representation

where

where
Taking

where

Hence, the Cauchy stress can be represented in components as

where
In the case of incompressible monoclinic Cauchy elastic solids, the second Piola–Kirchhoff stress tensor is written as

where

where
6.1. Compressible monoclinic solids
The Cauchy stress for compressible monoclinic Cauchy elastic solids is given in components as (see (195))

where

where
The constraints (203)1–(203)14 are identical to those for hyperelastic solids [13, 14]. Thus, similar to orthotropic solids, (203)15–(203)18 are the extra constraints in Cauchy elasticity.
Except for (203)6 and (203)14, the remaining constraints (for
6.2. Incompressible monoclinic solids
Let us substitute (197) into the equilibrium equations to get

for hyperelastic solids. Similarly, substituting the Cauchy stress (200) into the equilibrium equations (10) gives the following equation for Cauchy elastic solids

In hyperelasticity,
and
and
and

and
where
Taking (205) into account, one may determine

where
and
and

and
and

and
and

and
and

and
where
First consider the terms


The symmetry of

which is symmetric only when

in which we used

Because

The symmetry of

which implies that

which is symmetric only if
To summarize, we showed that the symmetries of the terms

in hyperelasticity are equivalent to those of

in Cauchy elasticity. Both sets are symmetric if

where
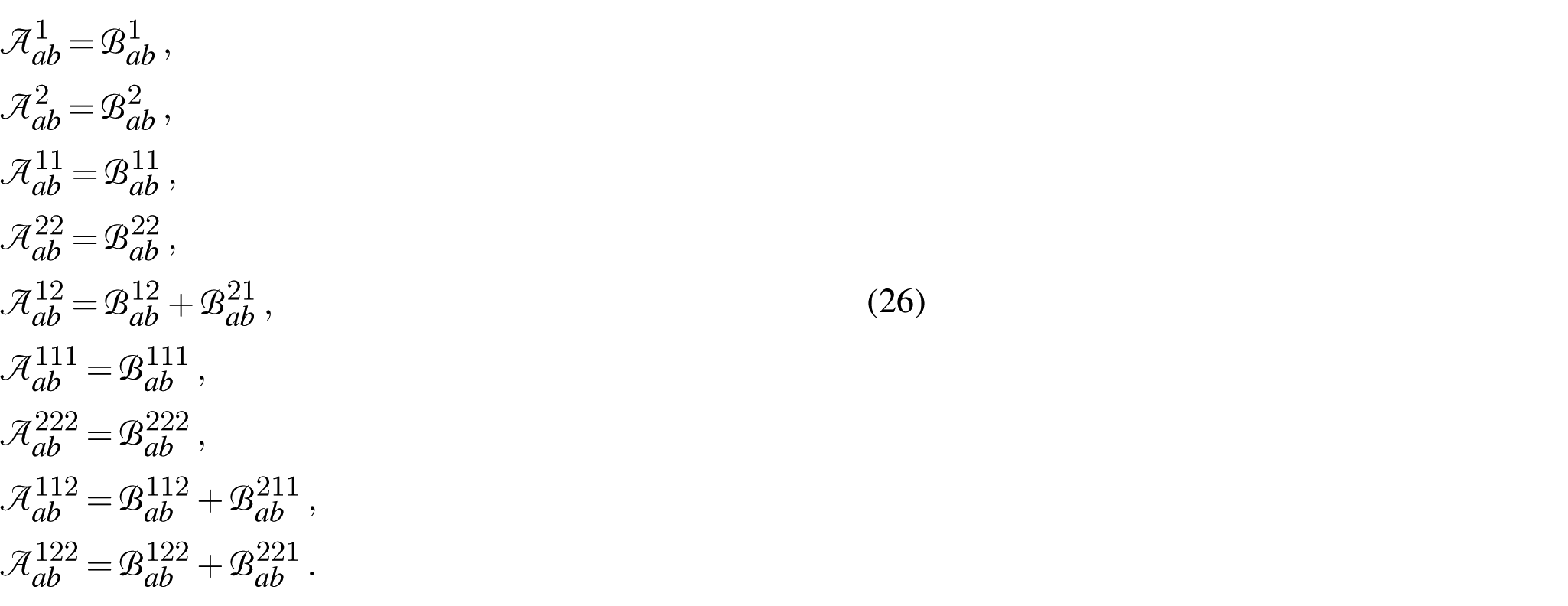
We now turn our attention to the terms

Based on (231) and (232), the terms
Regarding
In summary, we have proved the following result.
7. Conclusion
In this paper, we analyzed universal deformations in compressible and incompressible anisotropic Cauchy elastic solids. We showed that for transversely isotropic, orthotropic, and monoclinic materials, the sets of universal deformations and universal material preferred directions coincide with those previously obtained in the hyperelastic case. Thus, the existence of an energy function does not affect the form or characterization of universal deformations and material preferred directions in Cauchy elasticity. This result establishes that universal deformations and material preferred directions are independent of whether the constitutive law is derived from a potential. These findings extend and generalize earlier results for isotropic solids to the anisotropic setting. The present analysis provides a foundation for further exploration of universal deformations in more general material frameworks, including non-Cauchy elastic solids, materials with residual stress or microstructure, and generalized continua where additional internal variables appear.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.