
Abstract
We use Muskhelishvili’s complex variable formulation to solve the plane-strain problem of a compressible liquid inclusion of arbitrary shape embedded within an infinite isotropic elastic matrix under uniform remote in-plane stresses. First, the exterior of the domain occupied by the liquid inclusion is mapped onto the exterior of a unit circle in the image plane using a mapping function that contains an arbitrary number of terms. With the aid of a modified form of analytic continuation, a set of linear algebraic equations with relatively simple structure is obtained. Once this set of linear algebraic equations is solved, the internal uniform hydrostatic stress field within the liquid inclusion and the elastic field in the matrix (characterized by a pair of analytic functions) are fully determined. We illustrate our theory by deriving a closed-form solution for a hypotrochoidal liquid inclusion and comparing our results with those available in the existing literature. In addition, numerical results for the internal uniform hydrostatic stress within liquid inclusions with an n-fold axis of symmetry are presented graphically to examine the influence of the number of terms used in the mapping function. Finally, we determine the internal hydrostatic stress for the case of a rectangular liquid inclusion with various aspect ratios.
Keywords
1. Introduction
The study of porous materials and liquid inclusions embedded in a solid matrix has recently been the focus of intensive research in the literature. This topic has attracted considerable interest due to the presence of such materials in nature (e.g., rocks, crystals, ceramics, hydrogels, elastomers, and in biological tissues, such as bone [1–4]) and the role it plays in the design of advanced composite structures consisting of solids into which are embedded liquid inclusions: these structures demonstrate distinct mechanical properties including enhanced compliance, enhanced overall deformability, and the stiffening phenomenon for “small” liquid inclusions [5,6].
Eshelby’s celebrated theory of the mechanics of inclusions most often forms the basis of so many analyses which seek to explain how an inclusion in an elastic matrix deforms in response to remote stresses [7]. In the progression of research in this area, considerable attention has been devoted to the shape-dependence of a liquid inclusion embedded in a solid elastic matrix. However, these investigations have largely been restricted to simple inclusion geometries. Also, most of these studies focus on incompressible liquid inclusions perhaps as a result of the ease of tractability of the corresponding governing boundary value problems. One particularly elegant and relatively simple method used recently to derive closed-form solutions for the problem of a liquid inclusion embedded in a solid matrix involves the use of a conformal mapping function to map the boundary of the liquid inclusion onto a unit circle in the image plane. This technique can be used for different shapes of liquid inclusions, such as circles and ellipses [8–11], and for the case of liquid inclusions and pores having an n-fold axis of symmetry [12–15].
In this paper, we present a detailed analysis of the problem of an arbitrarily shaped compressible liquid inclusion embedded in an infinite isotropic elastic matrix under uniform remote in-plane stresses. We assume that the inclusion is perfectly bonded to the surrounding matrix. A conformal mapping function with N + 1 terms (where N is a positive integer allowed to be arbitrarily large to accommodate any smooth shape of inclusion) is used to map the exterior of the inclusion onto the exterior of a unit circle in the image plane. By imposing a modified form of analytic continuation across the perfect liquid–solid interface, a set of
2. Muskhelishvili’s complex variable formulation
We first establish a rectangular coordinate system

and,

where

3. General solution
We consider a compressible liquid inclusion of arbitrary shape embedded in an infinite isotropic elastic matrix subjected to uniform remote in-plane stresses
We first introduce the following conformal mapping function for the matrix [18,19]:

where R is a real scaling coefficient,
In order to ensure a uniform hydrostatic stress field within the liquid inclusion, the two stress functions within the liquid inclusion must take the following form:

where
The continuity of tractions across the perfect liquid–solid interface L can then be expressed in terms of

The following analytic continuation is then introduced [19]

where

with

In view of equation (7), the interface condition in equation (6) can be written more concisely in the form:

where the superscripts “+” and “−” denote the values obtained when approaching the unit circle from within and from outside, respectively.
It follows from equation (10) that

where
The derivation will become extremely tedious and cumbersome if the analytic continuation in equation (7) is used directly. Instead, equation (7) can be written in the following equivalent form:

Substituting equations (4), (8), and (11) into equation (12) and equating coefficients for like negative powers of ξ:
where
By taking the conjugate of equation (13), we obtain the following N linear algebraic equations:
The change in area

where the integral is taken in the counter-clockwise direction.
By substituting equations (4) and (11) into equation (15), we find that

On the other hand, the change in area

where
In order to ensure the continuity of displacements across the perfect liquid–solid interface L, it is necessary that

By substituting equations (16) and (17) into equation (18), the following linear algebraic equation is obtained

where

Now equations (13), (14), and (19) form a set of coupled
When
In particular, when

which recovers the result in Wang and Schiavone [12].
When

which is also in agreement with the result in Wang and Schiavone [20].
Once these

For example, the hoop stress

When the matrix is subjected to uniform remote hydrostatic stresses and the plane-strain bulk modulus of the liquid inclusion is equal to that of the elastic matrix, that is,

In this case, the presence of the liquid inclusion of arbitrary shape will not disturb the uniform hydrostatic stress field in the elastic matrix (i.e. the liquid inclusion is, in fact, neutral).
4. Numerical results and discussions
We apply the procedure developed earlier to several cases involving specific geometries describing liquid inclusions of various shapes; for example, a hypotrochoid, shapes with an n-fold axis of symmetry and rectangles with various side ratios (see Figure 1). In each case, the hydrostatic stress within the liquid inclusion is computed. In addition, we study the effect of the number of terms taken in the mapping function on the internal uniform hydrostatic stress.
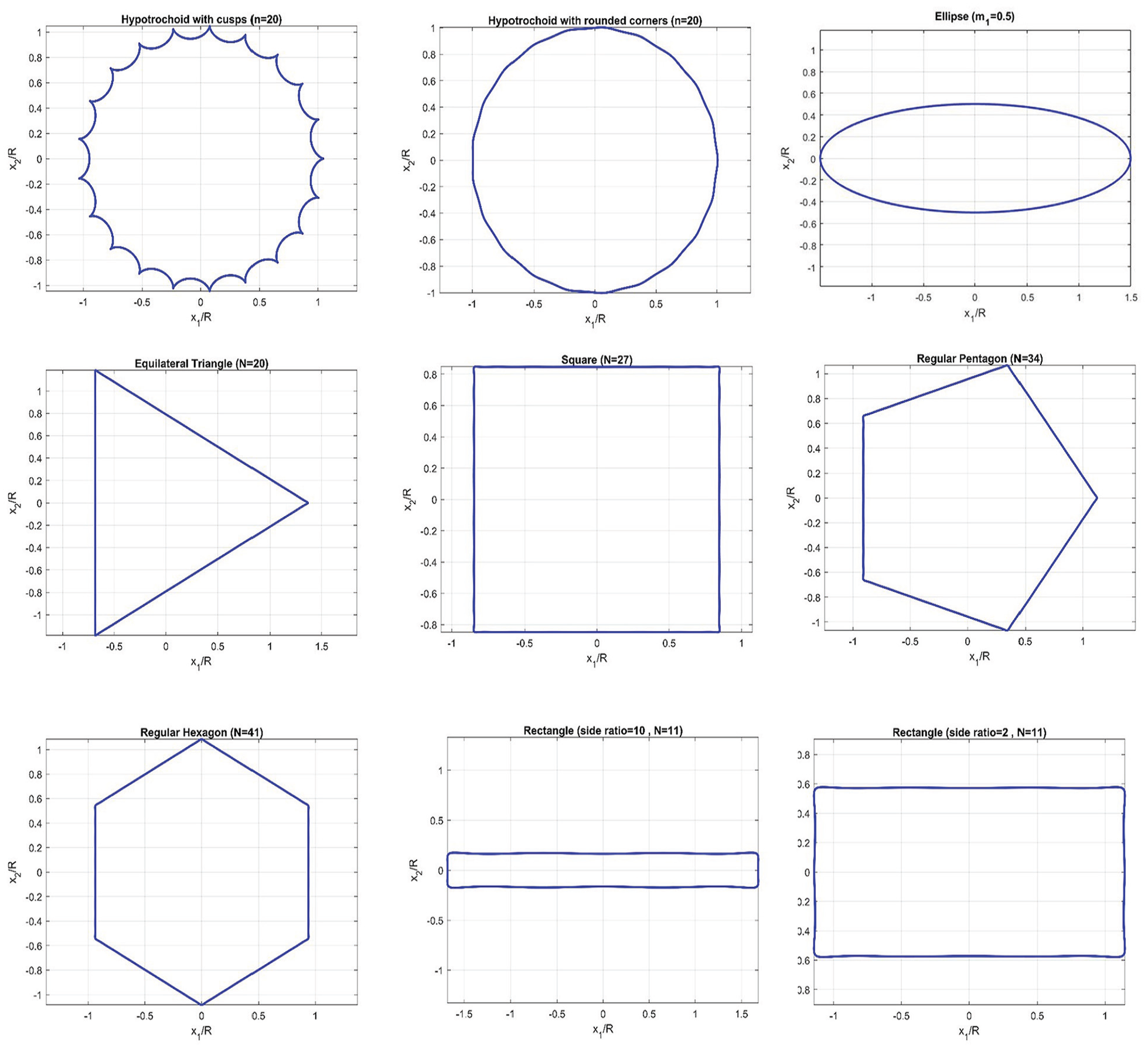
Different shapes of liquid inclusions analyzed in the numerical section.
4.1. Hypotrochoidal liquid inclusion
The mapping function for a hypotrochoidal liquid inclusion is given by [16]

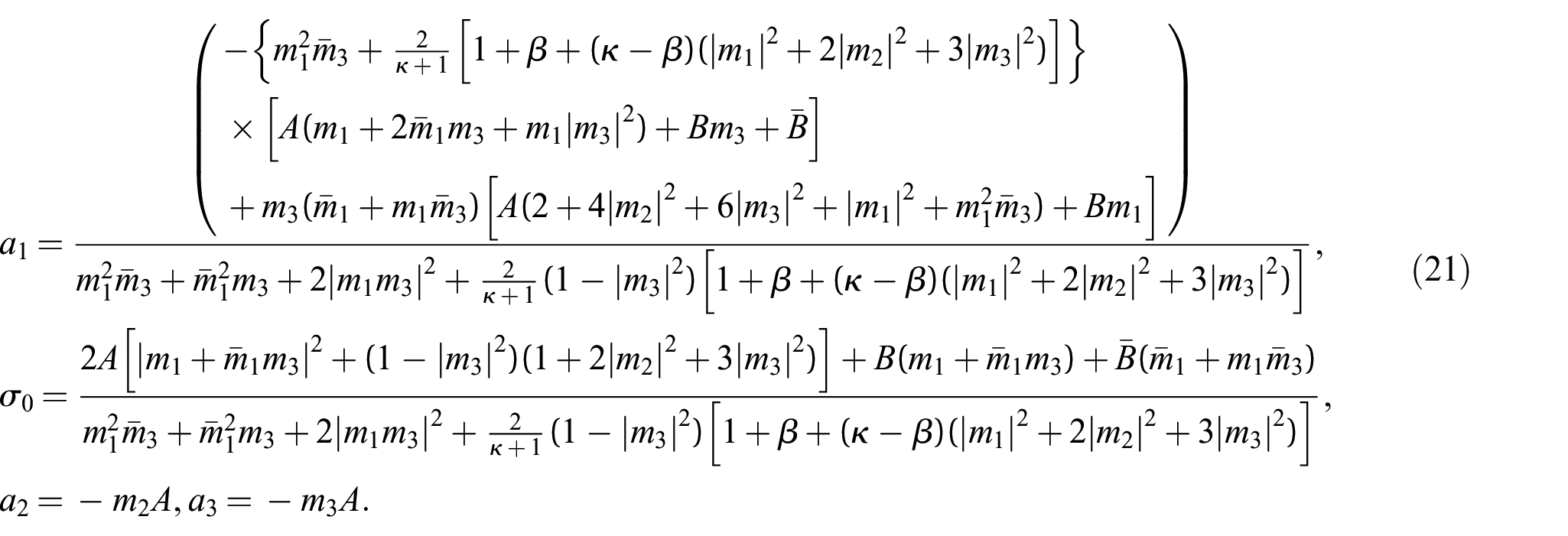
With this mapping function, equations (13), (14), and (19) for the case of a remote hydrostatic load (

which agrees with the result in Wang and Schiavone [12].
In the particular case when n = 1, the inclusion is elliptical and we have

Figure 2 illustrates the ratio
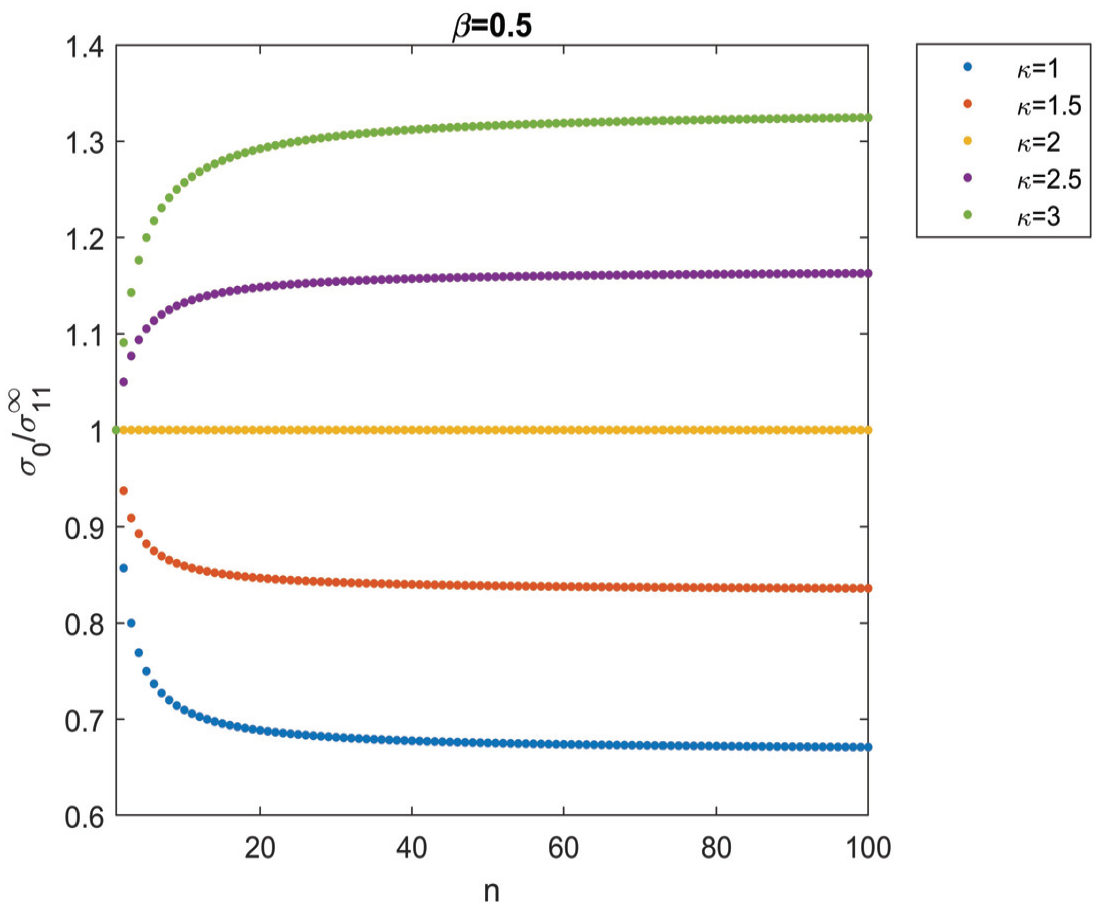
The behavior of
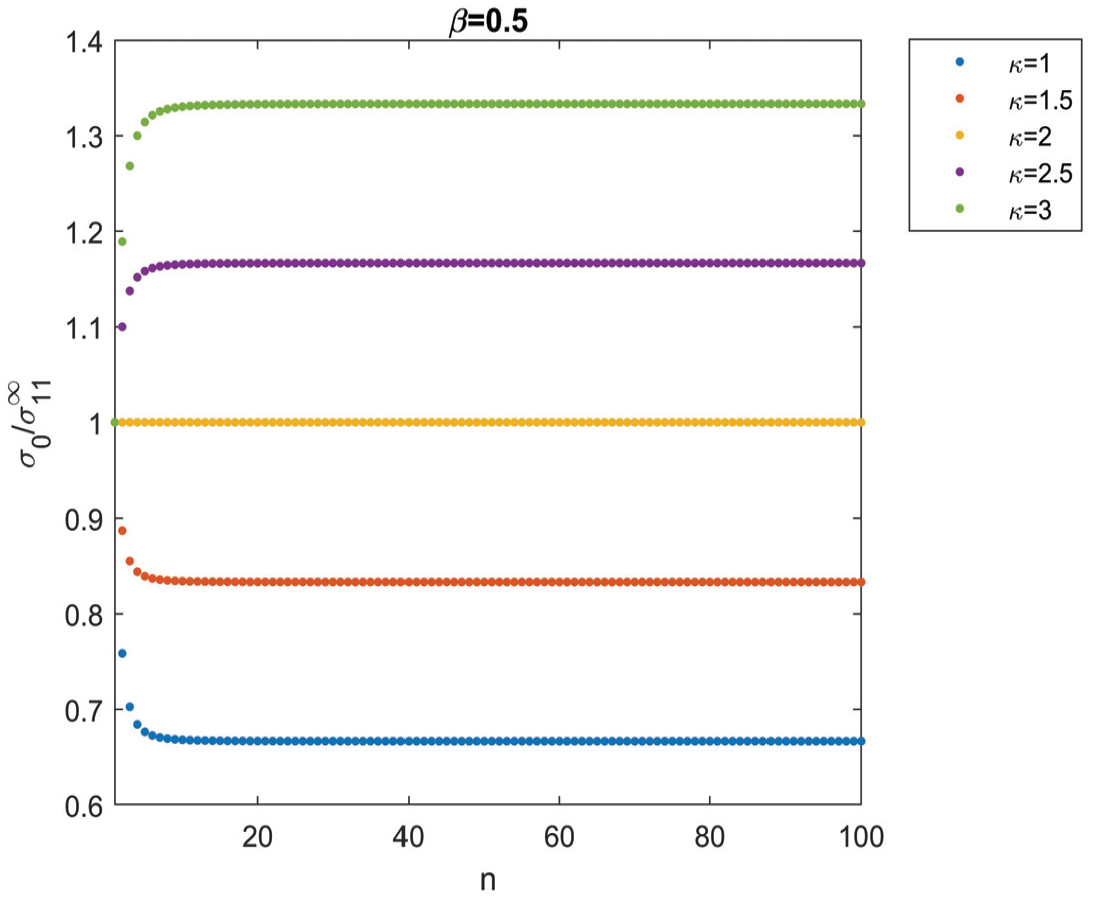
The behavior of
It can be observed from the figures that as
Figure 4 illustrates the variation of
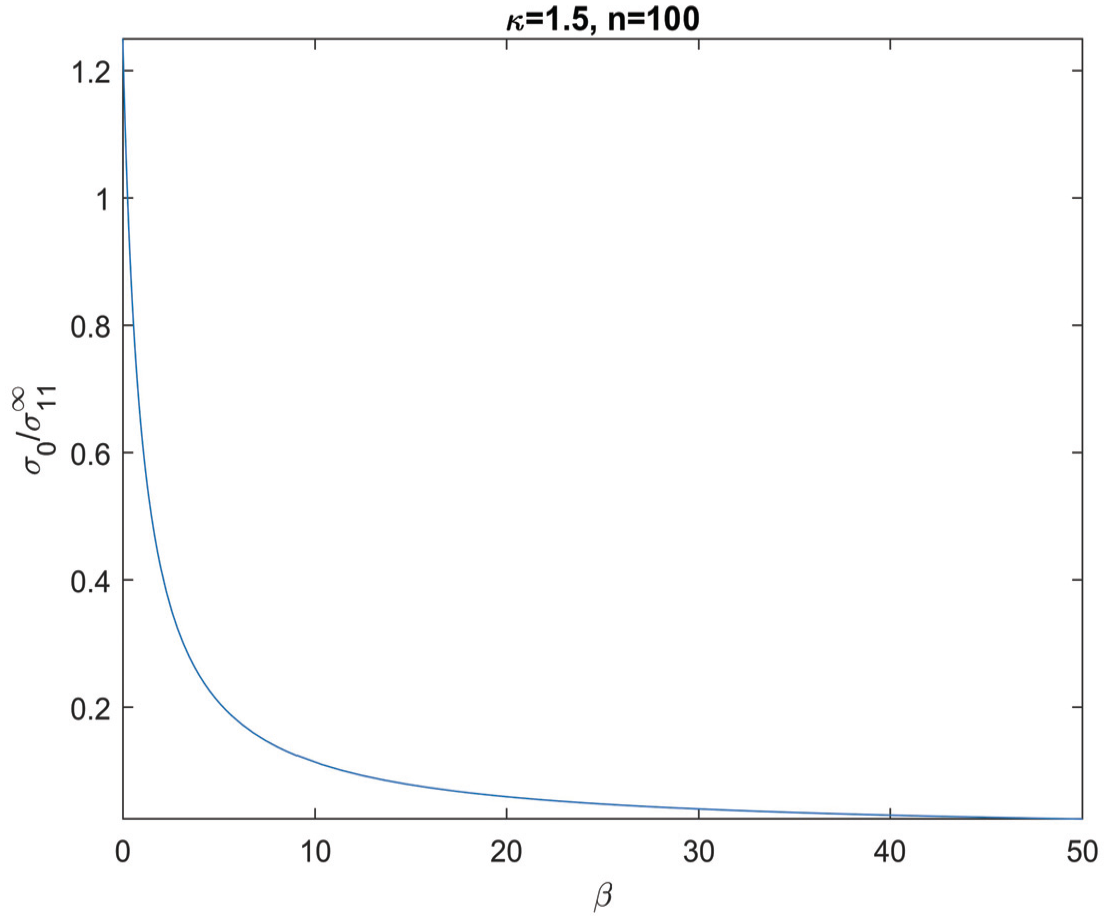
Dependence of
4.2. Liquid inclusions with an n-fold axis of symmetry
In this section, liquid inclusions with an n-fold axis of symmetry are analyzed. Equations (30)–(33) present the mapping functions for the shapes considered in this study, derived using the Schwarz–Christoffel transformation [18]:




Equations (13), (14), and (19) are solved using the given mapping functions for each shape. Figure 5 illustrates the variation of
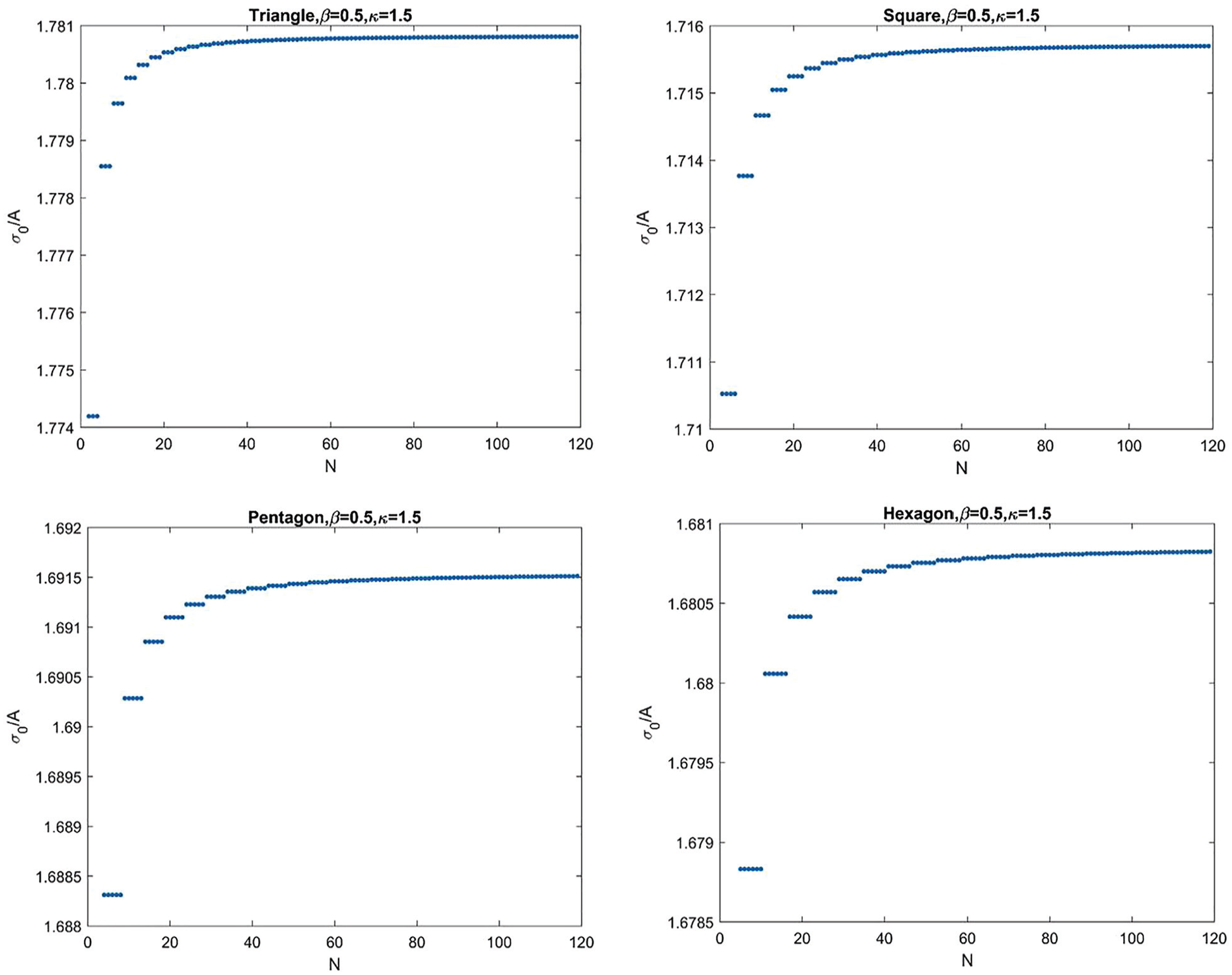
Internal hydrostatic stress for shapes with an n-fold axis of symmetry.
4.3. Liquid inclusions in the shape of rectangles
In this section,

Figure 6 illustrates the dependence of
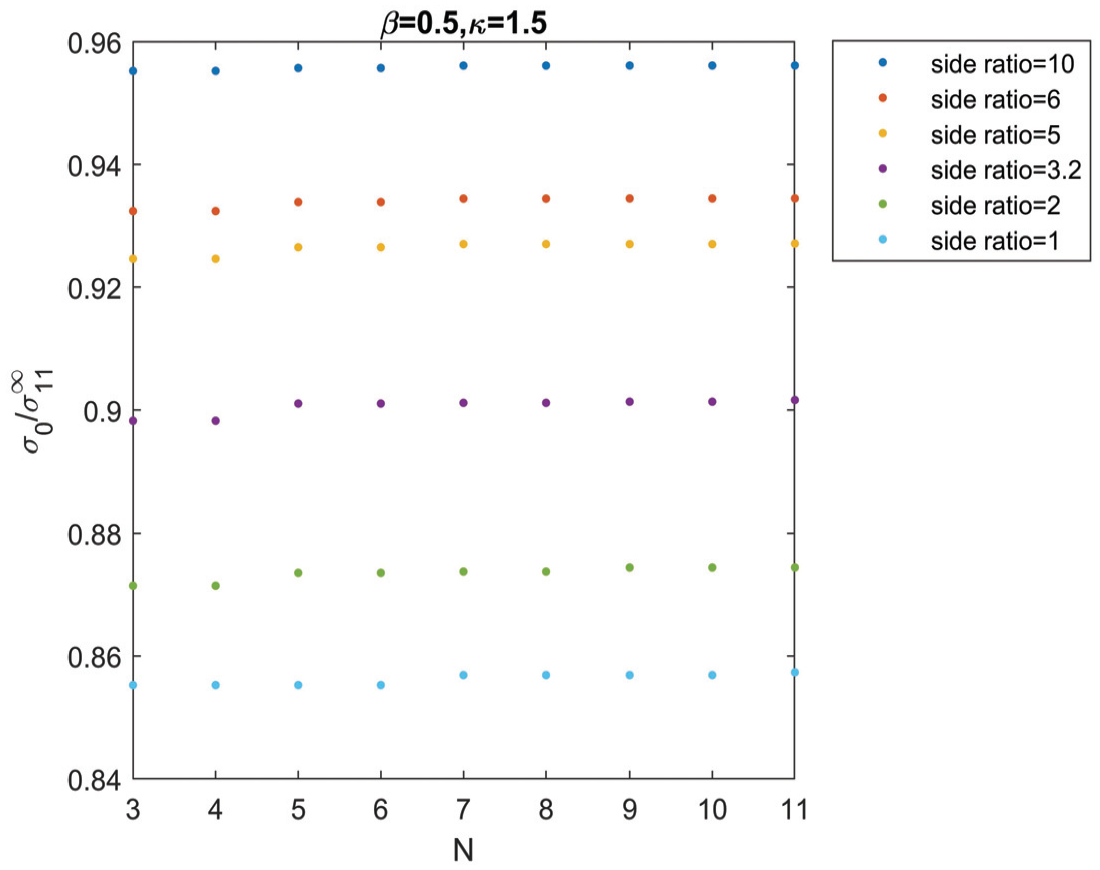
The dependence of
5. Conclusion
A simple and efficient method is proposed to study the problem of a compressible liquid inclusion of arbitrary shape in an infinite isotropic elastic matrix subjected to uniform remote in-plane stresses. Using the modified form of the analytic continuation in equation (12), we derive a set of
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by a Discovery Grant from the Natural Sciences and Engineering Research Council of Canada (grant no. RGPIN-2023-03227 Schiavo).