
Abstract
We derive a closed-form solution to the plane strain problem of a partially debonded rigid elliptical inclusion in which the debonded portion is filled with a liquid slit inclusion when the infinite isotropic elastic matrix is subjected to uniform remote in-plane stresses. The original boundary value problem is reduced to a Riemann–Hilbert problem with discontinuous coefficients, and its analytical solution is derived. By imposing the incompressibility condition of the liquid slit inclusion and balance of moment on a circular disk of infinite radius, we obtain a set of two coupled linear algebraic equations for the two unknowns characterizing the internal uniform hydrostatic tension within the liquid slit inclusion and the rigid body rotation of the rigid elliptical inclusion. As a result, these two unknowns can be uniquely determined revealing the elastic field in the matrix.
Keywords
1. Introduction
Analytical solutions to interface crack problems in laminate and fibrous composites have been well recorded in the literature with one of the main objectives being the study of the effect of interface fracture on the mechanical behavior of composites (see, e.g., [1–14]). In a recent study, Wang and Schiavone [15] analyzed the plane strain problem of a partially debonded circular elastic inhomogeneity and observed that when the debonded portion is filled with an incompressible liquid slit inclusion, interface crack growth can be completely suppressed as if the debonded portion of the circular interface doesn’t even exist when the elastic matrix is subjected to a hydrostatic far-field load. This fact suggests that liquid inclusions could be used quite effectively to repair interface cracks in composites. Although the micromechanics of liquid inclusions has been studied extensively in the last decade (see, e.g., [16–26]), the mechanism by which liquid inclusions play a role in repairing cracks has not been thoroughly investigated.
In this paper, we continue our recent study and analyze the plane strain problem of a partially debonded rigid elliptical inclusion with the debonded portion being occupied by a liquid slit inclusion when the surrounding infinite isotropic elastic matrix is subjected to uniform remote in-plane stresses. Since the initial area of the liquid slit inclusion is zero, the inclusion always behaves as if it is incompressible. The liquid slit inclusion admits an internal uniform hydrostatic stress field and remains perfectly bonded to the surrounding media. The original boundary value problem is reduced to a standard Riemann–Hilbert problem with discontinuous coefficients. An analytical solution to this Riemann–Hilbert problem can then be derived quite conveniently. However, this analytical solution contains the two unknowns characterizing the internal uniform hydrostatic tension within the liquid slit inclusion and the rigid body rotation of the rigid elliptical inclusion. By imposing the incompressibility condition of the liquid slit inclusion and the balance of moment on a circular disk of infinite radius, the two unknowns can be uniquely determined by solving a set of two coupled linear algebraic equations. In particular, when the two tips of the debonded portion (or those of the liquid slit inclusion) are symmetric with respect to the major or minor axis of the elliptical interface, the two unknowns can be determined quite simply from two separate linear algebraic equations. Our detailed numerical results demonstrate that the shape of the elliptical interface, the positions of the two tips of the debonded portion, and the Poisson’s ratio of the matrix all exert a significant influence on the internal uniform hydrostatic tension characterizing the liquid inclusion and rigid body rotation characterizing the rigid inclusion. In particular, when the remote loading satisfies the harmonic shape condition for a (perfectly bonded) rigid elliptical inclusion [27,28], the rigid elliptical inclusion is still perfectly bonded to the surrounding matrix as if the debonded portion doesn’t even exist. This fact implies that the insertion of the liquid slit inclusion into the debonded portion will also suppress crack growth along the elliptical interface.
2. Complex variable formulation
We first establish a Cartesian coordinate system

and

where

3. Closed-form solution
As shown in Figure 1, a rigid elliptical inclusion is partially bonded to an infinite isotropic elastic matrix subjected to uniform remote in-plane stresses
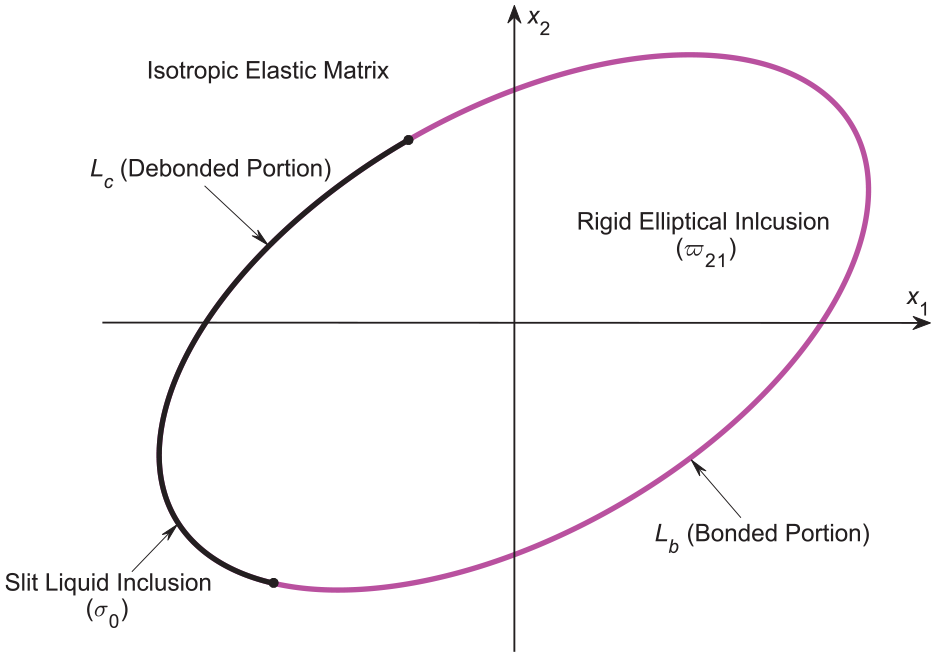
A rigid elliptical inclusion partially bonded to an infinite isotropic elastic matrix subjected to uniform remote in-plane stresses. The debonded portion
According to the above statement and the complex variable formulation in Section 2, the boundary value problem takes the following form in the physical z-plane:

where

We now introduce the following conformal mapping function for the matrix:

where m is a complex number.
As shown in Figure 2, using the mapping function in equation (6), the matrix is mapped onto
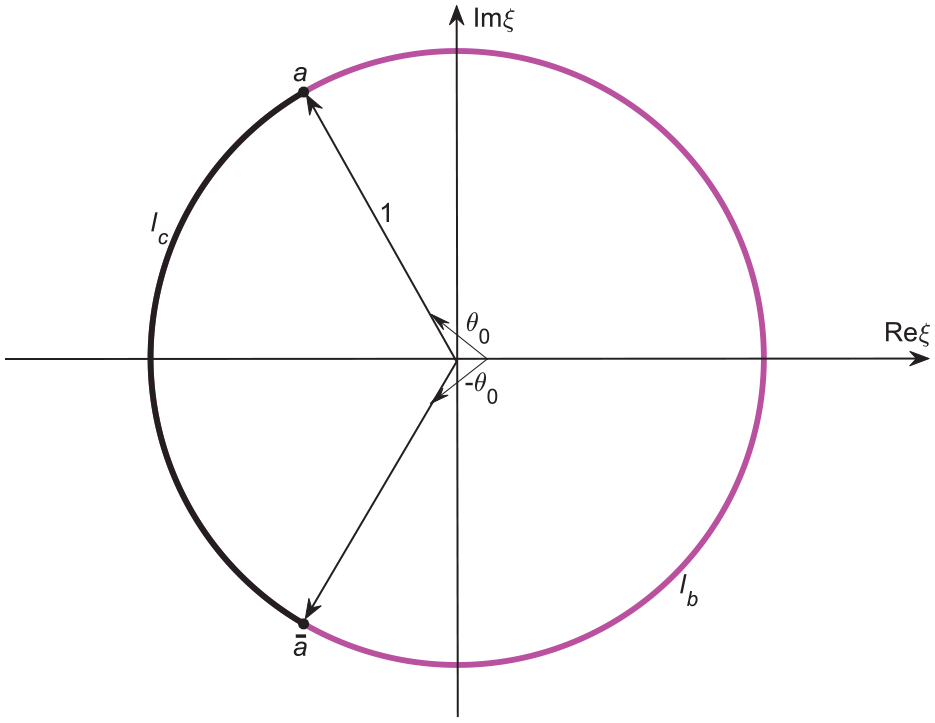
The image ξ-plane.
The boundary value problem takes the following form in the image ξ-plane:

where, for convenience, we write
Considering equation (7)1, we introduce an auxiliary function

It is seen from equation (8) that

where the superscripts “+” and “−” indicate the values when approaching the unit circle
Using the definition of

where

Equations (9) and (10) constitute a standard Riemann–Hilbert problem with discontinuous coefficients. An analytical solution to the Riemann–Hilbert problem in equations (9) and (10) can be derived as

where the Plemelj function

and

The brunch cut for the Plemelj function

where

where the integral contour is taken around
Using the residue theorem, the incompressibility condition in equation (16) is equivalent to

where the integral is taken in the counterclockwise direction.
It is derived from equation (12) that

and
where

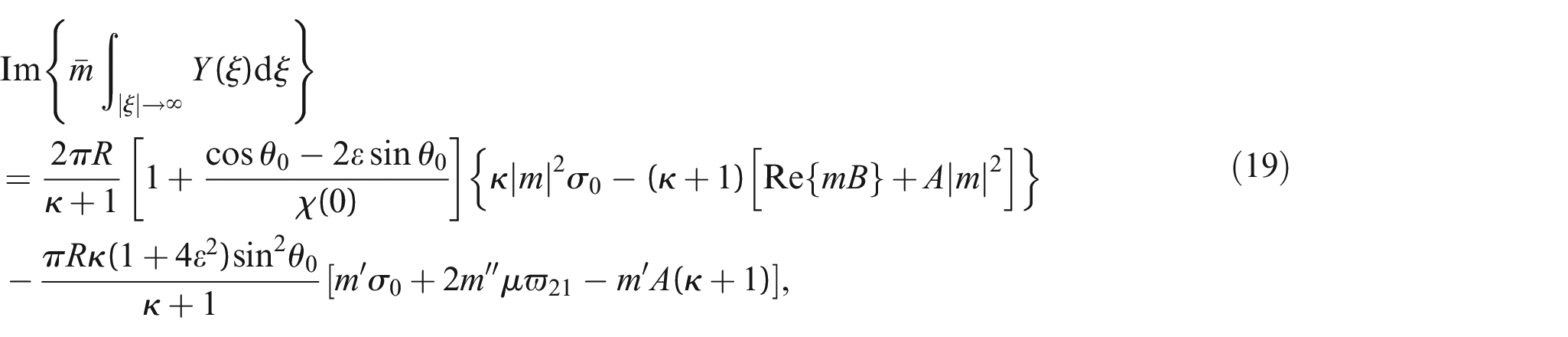
By substituting the results in equations (18) and (19) into equation (17), we obtain the following linear algebraic equation for the two unknowns
In addition, the remote asymptotic behavior of

where c is an arbitrary real number (i.e.,
It is obtained from equation (8) that the original pair of analytic functions

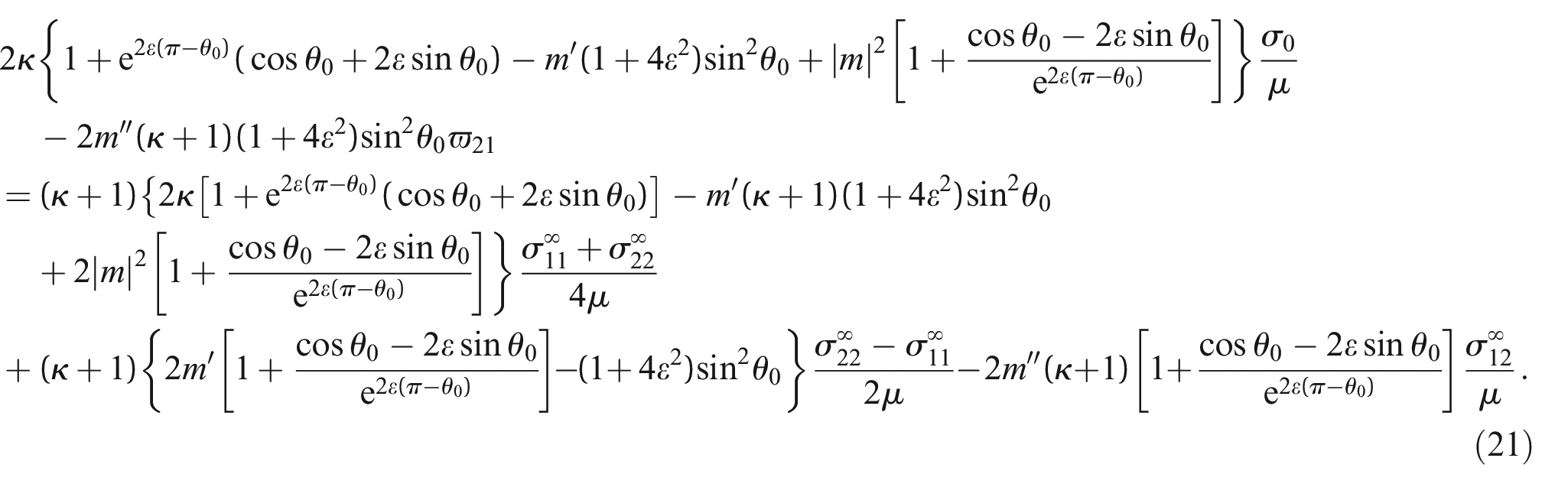
Using equation (23) to impose the condition in equation (22), we obtain another linear algebraic equation for the two unknowns
As a result,

where the six coefficients

In particular, when m is real valued (


where

We can see from equations (27) and (28) that
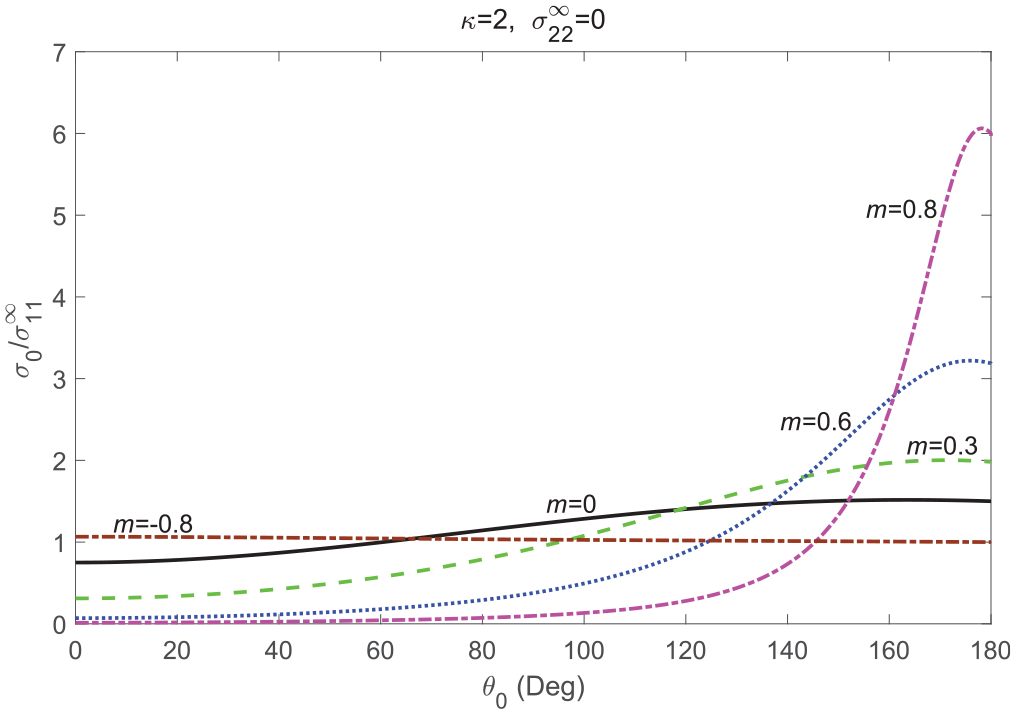
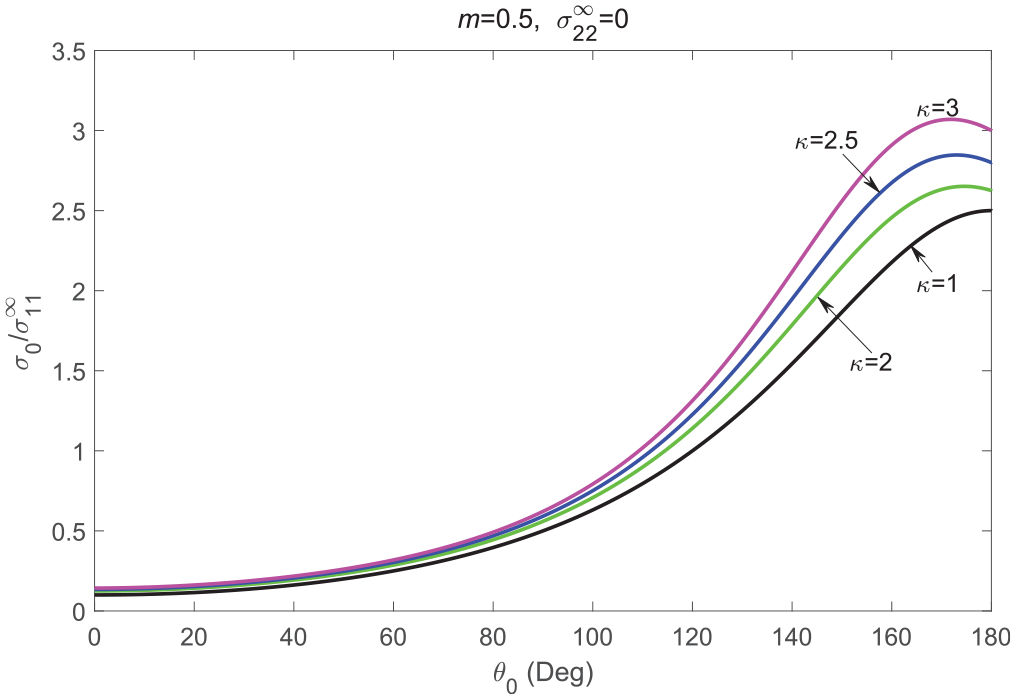
Variations of
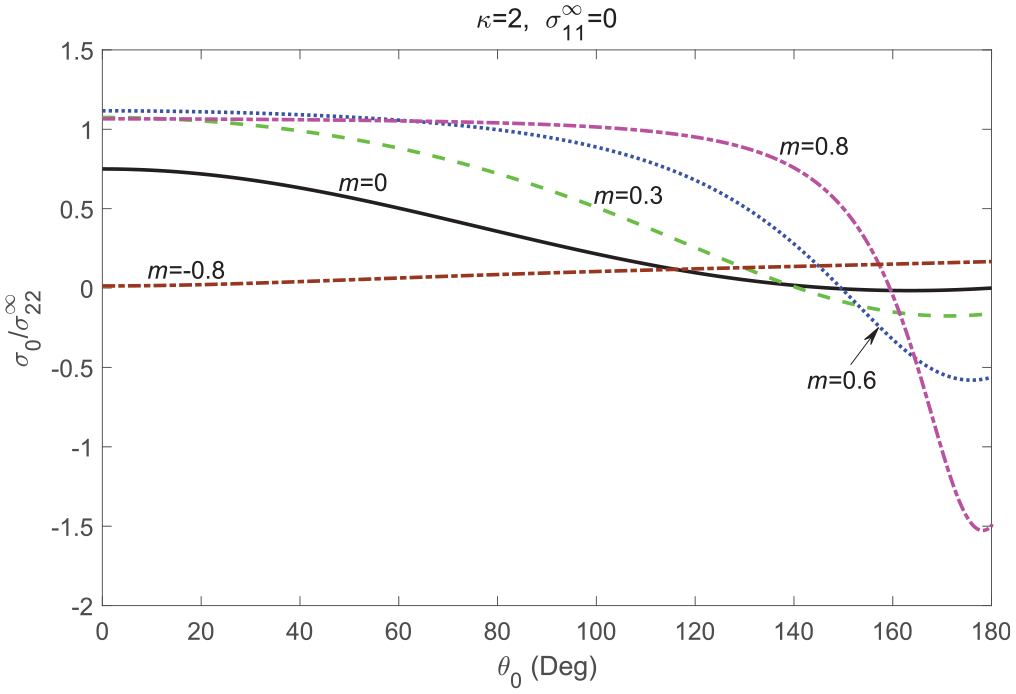
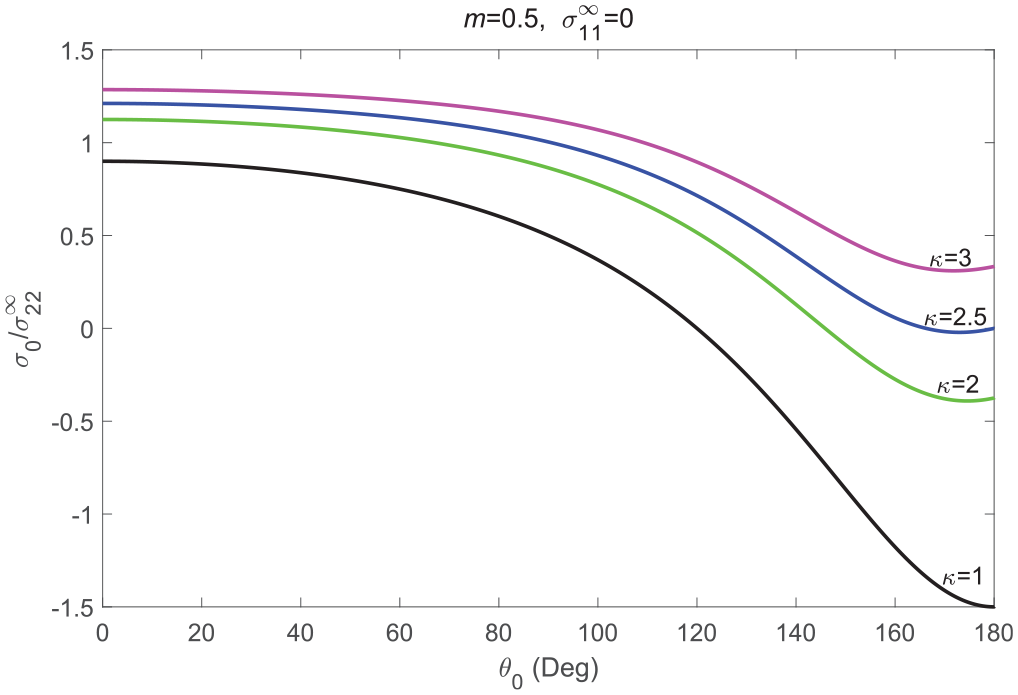
Variations of
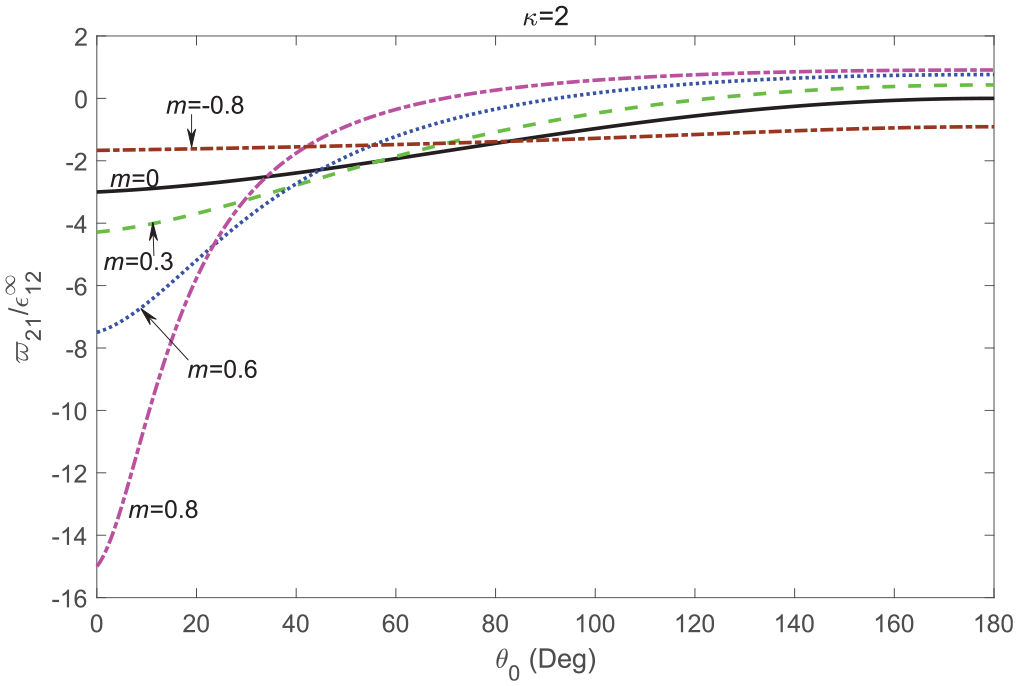
Variations of
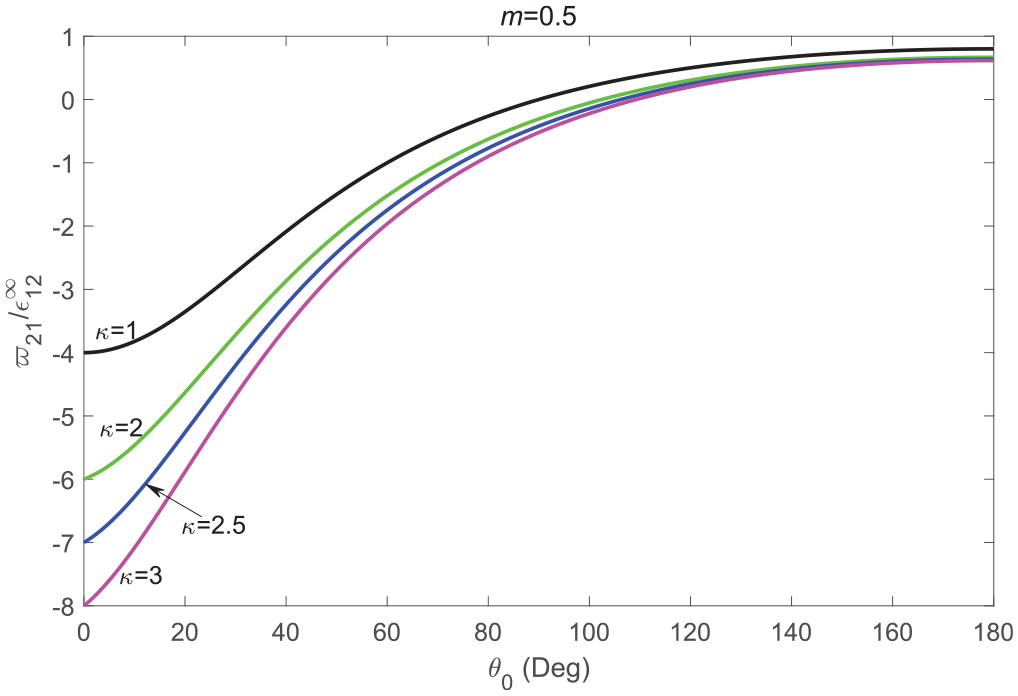
Variations of
Variations of
Variations of
When the rigid inclusion is completely debonded from the matrix with

When the rigid inclusion is circular with

which is consistent with our recent result for a partially debonded circular elastic inclusion in which the debonded part is filled with an incompressible liquid inclusion [15].
When the remote loading satisfies the following harmonic shape condition for a perfectly bonded rigid elliptical inclusion [27,28]:

Equation (27) reduces to

which means that the rigid elliptical inclusion is still perfectly bonded to the matrix or that the whole elliptical interface L becomes a liquid–solid interface. This fact implies that the insertion of the liquid inclusion into the debonded portion
When the rigid elliptical inclusion is perfectly bonded to the matrix with

which is consistent with our previous studies [32,33].
When the rigid inclusion is circular with

which also recovers our recent result for a partially debonded circular elastic inclusion in which the debonded portion is filled with an incompressible liquid inclusion [15].
Now, the auxiliary function

When m is real valued and the remote loading satisfies equation (32), it is verified using equations (28) and (36) that
4. Conclusions
We have derived a closed-form solution to the problem of a rigid elliptical inclusion partially bonded to an infinite elastic matrix subjected to uniform remote in-plane stresses. The debonded portion of the elliptical interface is filled with a liquid slit inclusion. By enforcing the interface conditions along the elliptical interface, a Riemann–Hilbert problem with discontinuous coefficients is derived in equations (9) and (10), and its solution is given by equation (12) which contains two unknowns
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by a Discovery Grant from the Natural Sciences and Engineering Research Council of Canada (grant no. RGPIN-2023-03227 Schiavo).