
Abstract
The classical reduced model for film/substrate bilayers is the one in which the film is governed by the Euler–Bernoulli beam equation, and the substrate is replaced by an array of springs (the so-called Winkler foundation assumption). We derive a refined model in which the normal and shear tractions at the bottom of the film are expressed in terms of the corresponding horizontal and vertical displacements, and the response of the half-space is described by the exact theory. The self-consistency of the refined model is confirmed by showing that it yields a four-term (in the incompressible case) or six-term (in the compressible case) expansion for the critical strain that agrees with the expansion given by the exact theory.
Keywords
1. Introduction
The buckling and post-buckling of a film/substrate bilayer, which is often idealised as a coated hyperelastic half-space, has received much attention in recent decades due to applications ranging from cell patterning [1], optical gratings [2–4], and creation of surfaces with desired wetting and adhesion properties [5–7], to the deduction of material properties of ultrathin films [8,9]. Under the framework of non-linear elasticity, early studies include the linear analyses by Dorris and Nemat-Nasser [10], Shield et al. [11], Ogden and Sotiropoulos [12], Bigoni et al. [13], Steigmann and Ogden [14], and the non-linear post-buckling analysis by Cai and Fu [15]. More recent studies have addressed the phenomenon of period doubling [16], effects of pre-stretching in the half-space [17], compressibility [18,19], multi-layering [20–22], growth [23–25], and magnetorheology [26]. There also exists a large body of literature based on various approximate models for the layer and substrate (see, for example, [27–30] and the references therein).
With the use of the exact theory of non-linear elasticity, Cai and Fu [15] derived the following asymptotic expansion for the critical strain when a neo-Hookean film bonded to a much softer neo-Hookean substrate, both in a state of plane strain, is subjected to a uni-axial compression:

where
It can be shown that the leading order version of equation (1), with only the first two terms on the right-hand side retained, can be derived from the classical model

by taking the incompressibility limit
For a stand-alone beam that is only subject to a force

where
Our reduced model will be derived for a general hyperelastic material, but to illustrate our results, we shall consider the case in which both the film and substrate are described by the strain-energy function

where

where


As expected, the expansion equation (5) recovers equation (1) in the incompressible limit
We note that the term

This expression correctly predicts the term
The rest of this paper is organised into four sections as follows. After formulating our problem and deriving the exact bifurcation condition in the next section, we devote section 3 to the derivation of the above-mentioned refined model. We first derive a Timoshenko-like model for the film and then use the Stroh formulation to describe the response of the substrate. In section 4, we specialise the model to the buckling analysis of a film/substrate bilayer and show that the reduced model can indeed predict equation (5). The paper is concluded in section 5 with a summary and a discussion of other possible applications of the current reduced model.
2. Formulation and the exact bifurcation condition
We consider a hyperelastic layer bonded to a hyperelastic half-space. To simplify derivations, we assume for the moment that both the layer and half-space are compressible and are in a state of plane strain. The corresponding results for the incompressible case will be obtained by taking the appropriate limit. We first summarise the governing equations valid for both the layer and half-space.
Consider a general, homogeneous elastic body

where
The deformation gradients arising from the deformations

where here and henceforth a comma indicates differentiation with respect to the implied spatial coordinate.
It is well-known (see, for example, [47]) that in the absence of body forces, the incremental equilibrium equations may be written in the form

where

The

where

where

where
In terms of the displacement components and in the absence of body forces, the equilibrium equation then takes the form

As indicated earlier, the finite deformation associated with
For plane-strain problems,


The traction vector

We now specialise the above equations to a coated half-space. In the undeformed configuration

respectively, where
The linearised buckling problem consists of solving the equilibrium equations (16) and (17) subject to (1) the traction-free boundary condition

where

where the expression for

we may find the coefficients
3. Derivation of the reduced model
We now proceed to derive a refined model that will yield the same asymptotic expansion (5) without having to solve the fully three-dimensional (3D) problem. Both the procedure outlined in Cai and Fu [32] and the expansion method pioneered by Dai and Song [41] have been used to derive the same equations, but we shall present our derivations corresponding to the latter method since they are more compact than those obtained using the former method. We also wish to promote the use of the latter method since this method was often explained and used in more involved situations than the current one, and as a result, its full potential does not seem to have been fully appreciated in the wider community.
3.1. Refined model for the coating layer
Following the strategy proposed by Dai and Song [41], we first look for a series solution of the form

where the coefficient functions
On substituting equation (22) into the traction-free boundary condition

Note that the traction-free boundary condition
On the other hand, on substituting equation (22) into equations (16) and (17) and equating the coefficients of like powers of


which are valid for


where the superscript “

Observe the special feature that the nth-order derivatives
As the next step in deriving the reduced model, we need to express the traction vector


where the sign “≡” defines the short notations
Viewing the two expressions (28) and (29) as asymptotic expansions for

where the unknown functions



As a result, on substituting equation (30) back into equations (26) and (27), the traction vector


where the new constant coefficients
As pointed out by Dai and Song [41] (see also [45]), the expansions such as equations (34) and (35) contain all the necessary terms that can be used to recover most of the existing plate theories, although this has not been carried out for higher order plate theories such as the Timoshenko theory. We now use these expansions to derive our refined model.
We use

where

where, e.g.,

The derivatives
We look for an asymptotic solution of the form


where the functions

with


where we have divided equation (35) by
On substituting equations (39) and (40) together with equations (36) and (37) into equations (41) and (42) and equating the coefficients of like powers of


where
At order


At order


where

Multiplying equations (46) and (48) by

On the other hand, multiplying equations (43) and (45) by

where we have used equation (36) to eliminate
Finally, on eliminating

where

Note that the first two terms on the right-hand side of equation (51) corresponds to the leading order theory, and we have not combined them with the other higher order terms. In particular, although the second term involving
In the next section, alternative expressions for
3.2. Response of the half-space
Having derived the relation between traction and displacement at the interface from the side of the coating layer, we now employ the Stroh formulation [50] to derive its counterpart from the side of half-space. The following derivations are adapted from [51].
The equilibrium equations for the half-space are

or equivalently,

where the three matrices

The traction vector

or equivalently,

We define the Fourier transform (FT) of


where the first expression defines the vector function

where a prime denotes differentiation with respect to

into equation (58), we find that the constant scalar

Under the assumption that

where


For

where an overbar signifies complex conjugation. It then follows that

With the aid of equations (61) and (62), we deduce that

Thus, we have

where

Re and Im denote the real and imaginary parts, respectively, and sgn is the sign function.
To invert equation (65), we make use of the result that

where the FT is understood to take its principal value. It then follows by inverting equation (65), followed by the use of the convolution theorem, that

where the star signifies integral convolution. Alternatively, we may write this result as

where

On eliminating

Note that the continuity condition
It was shown in Fu [51] that the matrix

so that equation (71) may also be rewritten as

The surface impedance matrix

This matrix equation can be solved analytically when there are enough symmetries in the problem. For the current plane-strain problem where the coordinate axes are in the principal directions of deformation, the three matrices

where

As a result, equation (74) can be solved explicitly to yield

with

Returning to equation (73) and evaluating it at the interface


With
The classical model corresponds to balancing the term

The

where

Equation (80) then recovers equation (2).
4. Self-consistency of the refined model
On substituting a periodic buckling solution of the form

into the reduced model equations (78) and (79) and cancelling

where the constants


Compared with equation (5), the expansion equation (83) contains two extra terms of order
The maximum stretch is attained when

into this equation and then equating the coefficients of like powers of


On substituting the expansion equation (86) back into equation (83), we obtain the corresponding expression for the critical stretch

where


In the incompressibility limit


Since care needs to be taken in using the truncated asymptotic expansion (83) to compute
We observe that in the incompressible case, we have
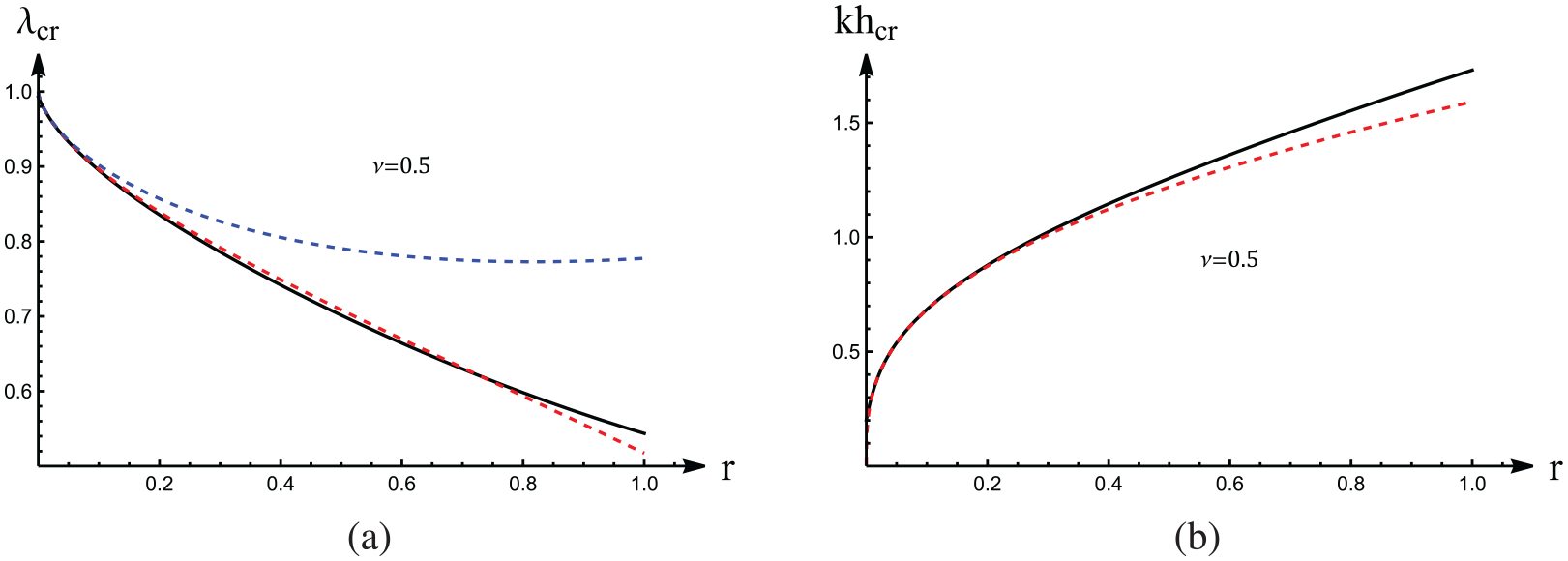
Comparison of asymptotic results (dashed lines) with exact results (black solid lines) in the incompressible case. The red dashed lines in (a) and (b) correspond to equations (92) and (93), respectively, and the blue line in (a) corresponds to equation (92) with the
Having demonstrated the importance of the extra
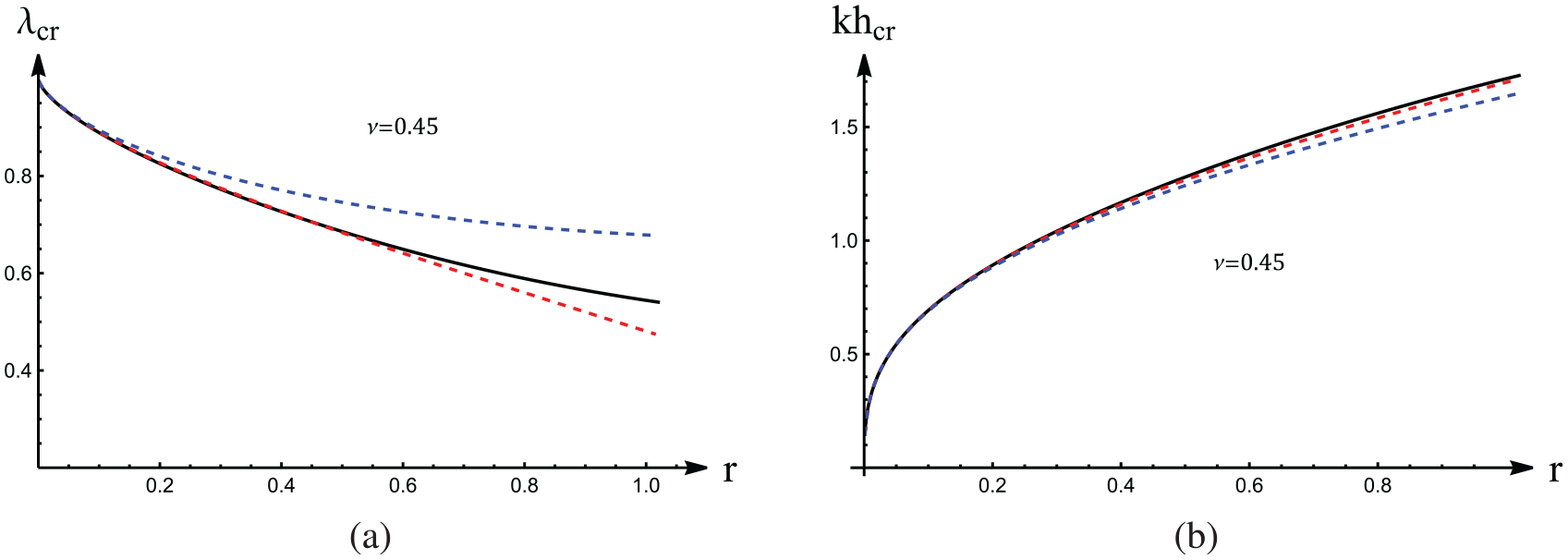
Comparison of asymptotic results (dashed lines) with exact results (black solid lines) when
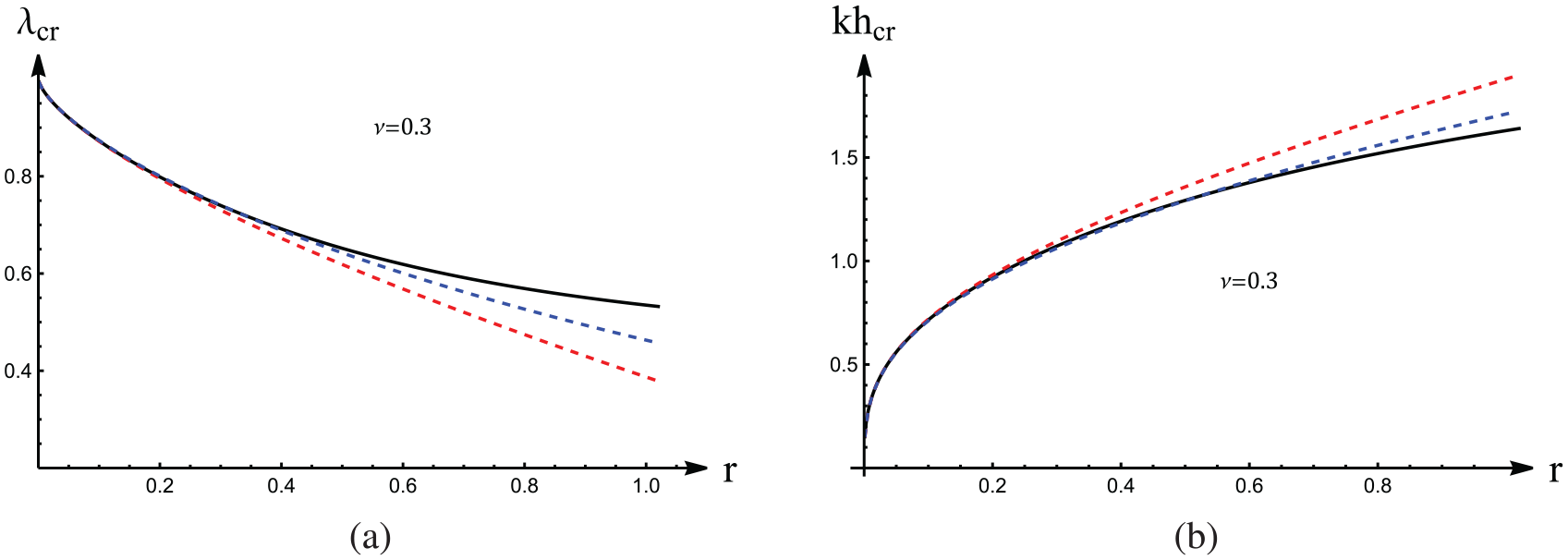
Comparison of asymptotic results (dashed lines) with exact results (black solid lines) when
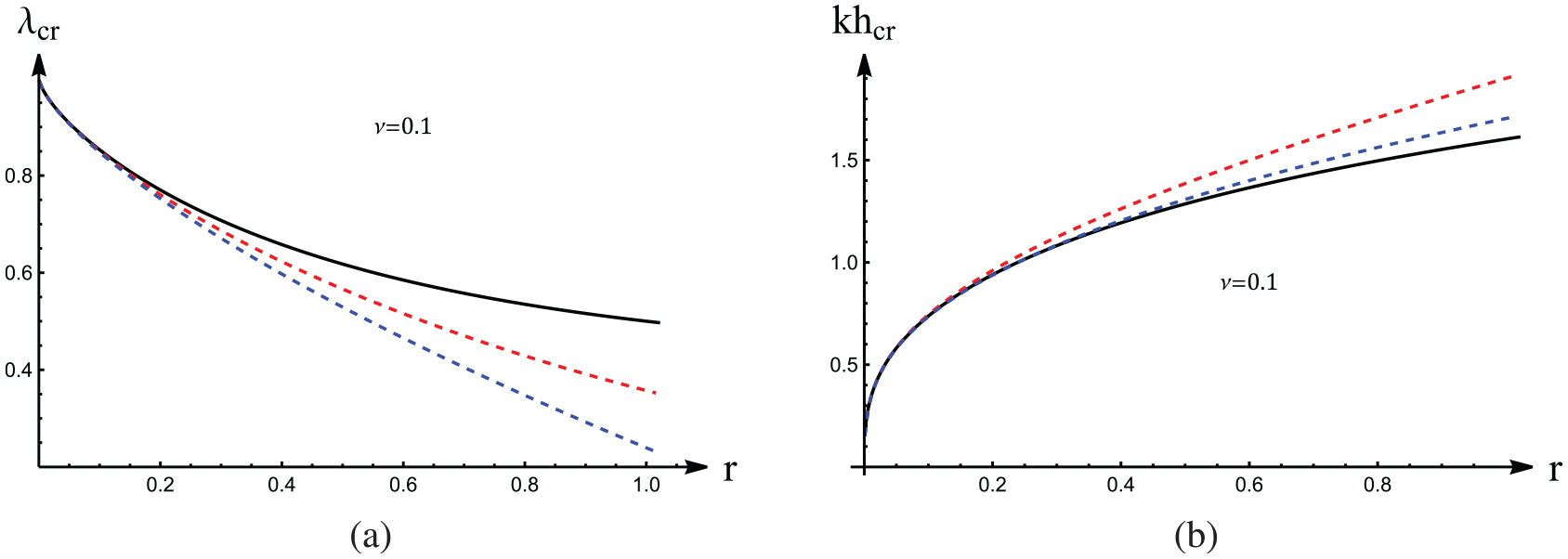
Comparison of asymptotic results (dashed lines) with exact results (black solid lines) when
5. Conclusion
Reduced plate and beam models have played an important role in engineering applications since they allow the most important information to be extracted without having to solve the fully 3D elasticity problem. In particular, the Euler–Bernoulli beam theory has frequently been used in studying pattern formation in film–substrate bilayers. Together with the Winkler assumption for the response of the substrate, this classical model is self-consistent and yields a leading order asymptotic expansion for the critical strain that agrees with that given by the exact 3D theory. In this paper, we have derived a refined model for the film–substrate interaction. The main motivation for deriving such a model is our planned study of pattern formation in a coated half-space where the coating has periodic but piecewise homogeneous material properties. For this problem, it is much harder to use the exact 3D theory to obtain analytical results than for the much studied case when the coating is homogeneous. Our preliminary study has shown that using the classical model is an attractive option, but its effectiveness is seriously hampered by the limited range of validity in which the theory is valid. It is hoped that the current refined model will increase the range of validity, and the relevant results will be published in a sequel to the current paper.
We used the methodology first proposed by Dai and Song [41] to derive the relationship between the traction and displacement vectors at the interface. The derivation consists of two steps. The first step is to express the traction and displacement vectors at the interface,
Footnotes
Acknowledgements
The authors thank Professors Julius Kaplunov and John Chapman at Keele University for useful discussions.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant nos 12072224 and 12072227).