This work presents a generalized Kirchhoff–Love shell theory that can explicitly capture fiber-induced anisotropy not only in stretching and out-of-plane bending, but also in in-plane bending. This setup is particularly suitable for heterogeneous and fibrous materials such as textiles, biomaterials, composites and pantographic structures. The presented theory is a direct extension of classical Kirchhoff–Love shell theory to incorporate the in-plane bending resistance of fibers. It also extends existing second-gradient Kirchhoff–Love shell theory for initially straight fibers to initially curved fibers. To describe the additional kinematics of multiple fiber families, a so-called in-plane curvature tensor—which is symmetric and of second order—is proposed. The effective stress tensor and the in-plane and out-of-plane moment tensors are then identified from the mechanical power balance. These tensors are all second order and symmetric in general. Constitutive equations for hyperelastic materials are derived from different expressions of the mechanical power balance. The weak form is also presented as it is required for computational shell formulations based on rotation-free finite element discretizations. The proposed theory is illustrated by several analytical examples.
Fiber-reinforced composites have become an important material in the sports, automotive, marine, and aerospace industry owing to their high-specific stiffness-to-weight ratio, which allows for lightweight designs. To produce such composites, fabric sheets are formed by warp and weft yarns (i.e. in a bundle of fibers) loosely linked together by different technologies, resulting, for example, in woven fabrics or non-crimp fabrics. The fabrics are then draped (molded) into desired shapes before injecting liquid resin (adhesives). After the resin solidifies, the fibers are strongly bonded together in the final product.
In this work, we are interested in continuum models for fabric sheets both with and without matrix material. Such models are required for the description and simulation of fiber-reinforced shell structures and draping processes. Geometrically, fabric structures can be modeled by a surface with embedded curves representing yarns. From the microscopic point of view, the resistance (in-plane and out-of-plane) of fabrics results from the deformation of yarns and their interaction, that is, their linkage and contact. In particular, axial stretching of fibers is associated with anisotropic membrane resistance, and the linkage between yarns offers shear resistance. Twisting of a yarn can be assumed to be fully associated with the second fundamental form of the yarn-embedding surface [1]. Bending of a yarn can have both in-plane and out-of-plane components and is characterized by the corresponding curvatures. The out-of-plane curvature is associated with the second fundamental form, while the in-plane curvature is associated with the gradient of the surface metric.
Fabric sheets can be modeled as thin shells from the macroscopic point of view, and Kirchhoff–Love kinematics together with plane stress conditions are usually adopted. Membrane deformation is characterized by stretching and shearing, while out-of-plane deformation is characterized by bending and twisting. In Kirchhoff–Love shell models, two kinematical quantities—the surface metric and the second fundamental form—are used for the two deformation types. In the literature, the general case of arbitrarily large deformations and nonlinear material behavior of shells has been treated extensively. See, for example, the texts of Naghdi [2], Pietraszkiewicz [3], Libai and Simmonds [4] and references therein. Here, we refer to this nonlinear case as classical Kirchhoff–Love shell theory. Note that although Kirchhoff–Love shell theory is mostly discussed for solids, its application can also be extended to liquid shells [5]. The incorporation of material anisotropy in classical Kirchhoff–Love shells due to embedded fibers—for both stretching and out-of-plane bending—is straightforward, see, for example, the works by Tepole et al. [6] and Wu et al. [7] and references therein. As shown by Roohbakhshan and Sauer [8], classical Kirchhoff–Love shell theory also admits complex anisotropic bending models, for example, due to fibers not located at the mid-surface.
While classical Kirchhoff–Love shell theory can also be regarded as a special case of Cosserat theory [9],1 it has its own development history and has the advantage of simplicity and intuitiveness when following its argument structure. Therefore, it facilitates building corresponding computational as well as physically based constitutive models. This motivated Sauer and Duong [10] to provide a unified formulation for both liquid and solid shells within the framework of classical Kirchhoff–Love shell theory. Their work aimed at providing a concise, yet general theoretical framework for corresponding computational rotation-free shell formulations [11,12].
It should be noted that most existing shell models, including classical Kirchhoff–Love shell theory, focus on out-of-plane bending, while the in-plane response is still based on the classical Cauchy continuum. That is, one assumes that there is no moment (or stress couple) causing in-plane bending at a material point. This assumption is usually sufficient when only the overall material behavior is of interest, as, for example, in the draping simulations of Khiêm et al. [13]. However, it fails to capture deformations governed by in-plane fiber bending, which are important for obtaining accurate and convergent numerical results. An example of these are the localized shear bands [14,15] in the bias-extension test. In this case, simulations with finite element shell models based on the in-plane Cauchy continuum will fail to converge to a finite width of the shear band under mesh refinement. Another example is the asymmetric deformation of woven fabrics with different in-plane fiber bending stiffness for different fiber families [16,17].
Similar effects of the in-plane bending stiffness can also be found in pantographic structures [18–20] and fibrous composites, such as biological tissues [21]. Thus, a more general model that considers the in-plane bending response is required for fabrics, fibrous composites, and pantographic structures.
The first theoretical work considering in-plane bending was presented by Wang and Pipkin [22,23] to model cloth and cable networks. Their theory is a special form of finite-deformation fibrous plate theory with inextensible fibers that contain bending couples that are proportional to their curvature. Since in-plane bending is related to the in-plane components of the second displacement gradient, it can be captured by more general continuum theories, such as Cosserat theories [24–26] and gradient theories [27–30]. For three-dimensional (3D) fiber-reinforced solids, Spencer and Soldatos [31] introduced explicitly the bending resistance of embedded fibers in the context of nonlinear second-gradient theory. A computational model based on Spencer and Soldatos [31] has been developed by Asmanoglo and Menzel [32]. Starting from Cosserat theory, Steigmann [33] derives a fiber-reinforced solid model that includes fiber bending, twisting, and stretching.
Concerned with in-plane bending for thin structures, Steigmann and Dell’Isola [1] presented a continuum model for woven fabric sheets modeled as orthotropic plates, which treats fibers as Kirchhoff–Love rods that are distributed continuously across the sheet. Although the concept of stress couples from Cosserat theory is used, the model of Steigmann and Dell’Isola [1] can be categorized as second-gradient theory, since their material model depends on the first and second displacement gradients. Following this, Steigmann [34] further developed a second-gradient shell model that explicitly includes general fiber bending, twisting, and stretching. There, a concise set of equilibrium equations, boundary conditions, and material symmetries are discussed. However, to the best of our knowledge, the theory has not yet been fully formulated for the general case of more than two fiber families with initially curved fibers.
Focusing on Kirchhoff–Love shells, Balobanov et al. [35] presented a new shell model derived from the second displacement gradient theory of Mindlin [28]. A corresponding computational formulation was also discussed in Balobanov et al. [35]. However, explicit in-plane fiber bending is not considered and the weak form requires at least -continuity of the geometry. Recently, Schulte et al. [36] applied the second-gradient theory of Steigmann [34] directly to Kirchhoff–Love shells and presented the first rotation-free computational shell formulation accounting for in-plane bending using -continuous discretization.
In this contribution, we propose a general Kirchhoff–Love shell theory that explicitly incorporates fiber bending (both in-plane and out-of-plane), geodesic fiber twisting, and stretching. Unlike the existing approaches that derive the Kirchhoff–Love shell from a more general theory, here our theory is constructed directly from Kirchhoff–Love thin shell assumptions without introducing extra degrees of freedom, such as independent directors or micro-displacements. It is shown that the in-plane fiber bending contribution can be formulated analogously to its out-of-plane counterpart. All the definitions of stresses and moments, and the equilibrium equations thus follow in the same manner as in classical Kirchhoff–Love shell theory. Unlike the second-gradient theory of Steigmann [34], the stress couple (or double force) in our theory is fully equivalent to the bending moment under Kirchhoff–Love assumptions.
Our approach provides several advantages over existing second-gradient shell theories, such as those of Steigmann and Dell’Isola [1] and Steigmann [34]. In particular, it allows us to identify work-conjugated pairs of symmetric stress and symmetric strain measures for all terms, including a new in-plane stress couple and corresponding in-plane curvature tensor. Instead of using third-order tensors for in-plane bending, as is done in current second-gradient shell theories, the stress and strain tensors in our theory are all of second order. Their invariants thus can be easily identified and geometrically interpreted, which is advantageous for constructing constitutive models. Furthermore, our theory admits a wide range of constitutive models for straight as well as initially curved fibers without limitation on the number of fiber families and the angles between them.
Besides, the presented work also aims at providing a general formulation that is suitable for a straightforward isogeometric finite element implementation [37]. Since the in-plane bending term in our theory is analogous to the out-of-plane bending term, existing finite element formulations for out-of-plane bending can be easily extended to in-plane bending. As for existing formulations, the corresponding weak form requires at least -continuous surface discretizations in the framework of rotation-free finite element formulations. For the purpose of verifying finite element implementations, we further provide the analytical solution for several nonlinear benchmark examples. Here, we are restricting ourselves to hyperelastic material models for the fabrics. Inelastic behavior, for example, due to inter- and intra-ply fiber sliding, will be considered in future work.
In summary, our approach contains the following novelties and merits compared to earlier works:
A concise shell theory with in-plane bending that is a direct extension of classical Kirchhoff–Love thin shell theory;
A general theory that can admit a wide range of constitutive models for straight or initially curved fibers with no limitation on the number of fiber families and the angles between them;
The introduction of a new symmetric in-plane curvature tensor;
The identification of work-conjugated pairs of symmetric stress and symmetric strain measures;
The weak form as it is required for rotation-free finite element formulations;
The analytical solution for several nonlinear benchmark examples that include different modes of fiber deformation and are useful for verifying computational formulations.
The following presentation is structured as follows: Section 2 summarizes the kinematics of thin shells with embedded curves and introduces the in-plane curvature tensor to capture the in-plane curvature of fibers. With this, the balance laws are presented in section 3. Different choices of work-conjugated pairs are then discussed in section 4. Section 5 gives some examples of constitutive models for the proposed theory. Section 6 then presents the weak form. Several analytical benchmark examples supporting the proposed theory are presented in section 7. The article is concluded by section 8.
2. Kinematics for thin shells with embedded curves
In this section, nonlinear Kirchhoff–Love shell kinematics [2] is extended to deforming surfaces with embedded curves. The extended kinematics allows to capture not only stretching and out-of-plane bending, but also in-plane bending of the embedded curves. Fiber-induced anisotropy is allowed in all these modes of deformation. The description is presented fully in the general framework of curvilinear coordinates. The variation of different kinematical quantities can be found in Appendix 2.
2.1. Geometric description
The mid-surface of a thin shell at time is modeled in three-dimensional space as a two-dimensional (2D) manifold, denoted by . In curvilinear coordinates, is described by the one-to-one mapping of a point in parameter space to the point as
The (covariant) tangent vectors along the convective coordinate curves at any point can be defined by
where the comma denotes the parametric derivative. The unit normal vector can then be defined by
From the tangent vectors in equation (2), the so-called dual tangent vectors, denoted by , are defined by
with being the Kronecker delta. The covariant and dual tangent vectors are related to each other by2 and , where
denote the co- and contravariant surface metric, respectively.
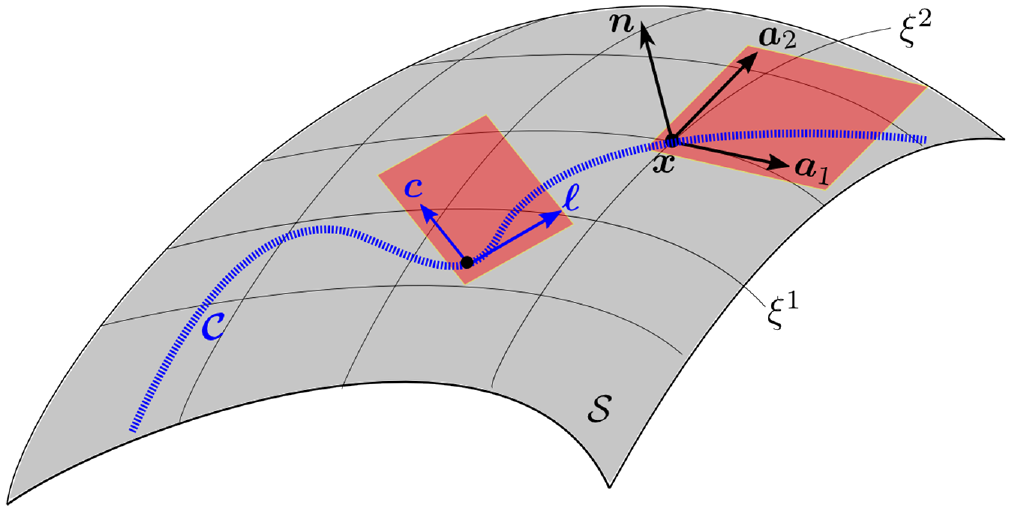
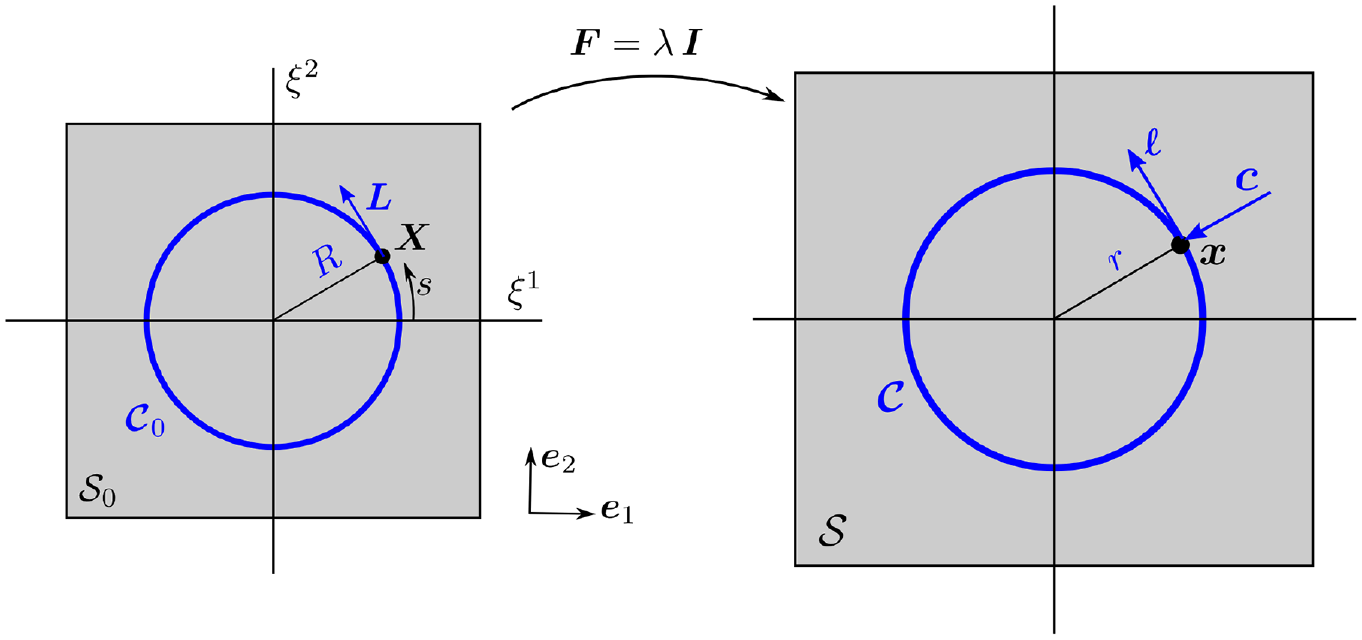
Furthermore, in order to model fibrous thin shells, a fiber (or a bundle of fibers) is geometrically represented by a curve defined by the points , with , embedded in surface (see Figure 1). The distribution of fibers is considered continuous such that a homogenized shell theory is obtained. The normalized tangent vector of , defined by
represents the fiber direction at location . Here, and denote the covariant and contravariant components of vector in the convective coordinate system, respectively. Assuming that the deformation of fibers satisfies Euler–Bernoulli kinematics, the in-plane director for the fiber can be defined by
where, and are the covariant and contravariant components of vector , respectively. With equations (6) and (7), bases and can be represented by the local Cartesian basis as
A fiber bundle represented by curve is embedded in shell surface . The red planes illustrate tangent planes.
The surface identity tensor and the full identity in can then be written as
and
2.2. Surface curvature
The curvature of surface can be described by the symmetric second-order tensor
The components can be computed from the derivative of surface normal as
which leads to Weingarten’s formula
Alternatively, components can be extracted from the derivatives of tangent vectors as
where
are the parametric and covariant derivative of , respectively.3
Unlike , which always lies in the tangent plane, can have both tangential and normal components. With respect to basis the vectors can be expressed as
where the tangential components
are known as the surface Christoffel symbols. They are symmetric in indices and . Using transformation (8.2), they can be expressed as
where we have defined
The curvature tensor defined in equation (11) has the two invariants
They correspond to the mean and Gaussian curvatures, respectively. The curvature tensor fully describes the out-of-plane curvature of surface . Thus, we can extract from it the curvature of along any direction. For example,
represents the curvature of in direction . Hence, also expresses the so-called normal curvature of the curve embedded in . Furthermore,
denotes the so-called geodesic torsion of .
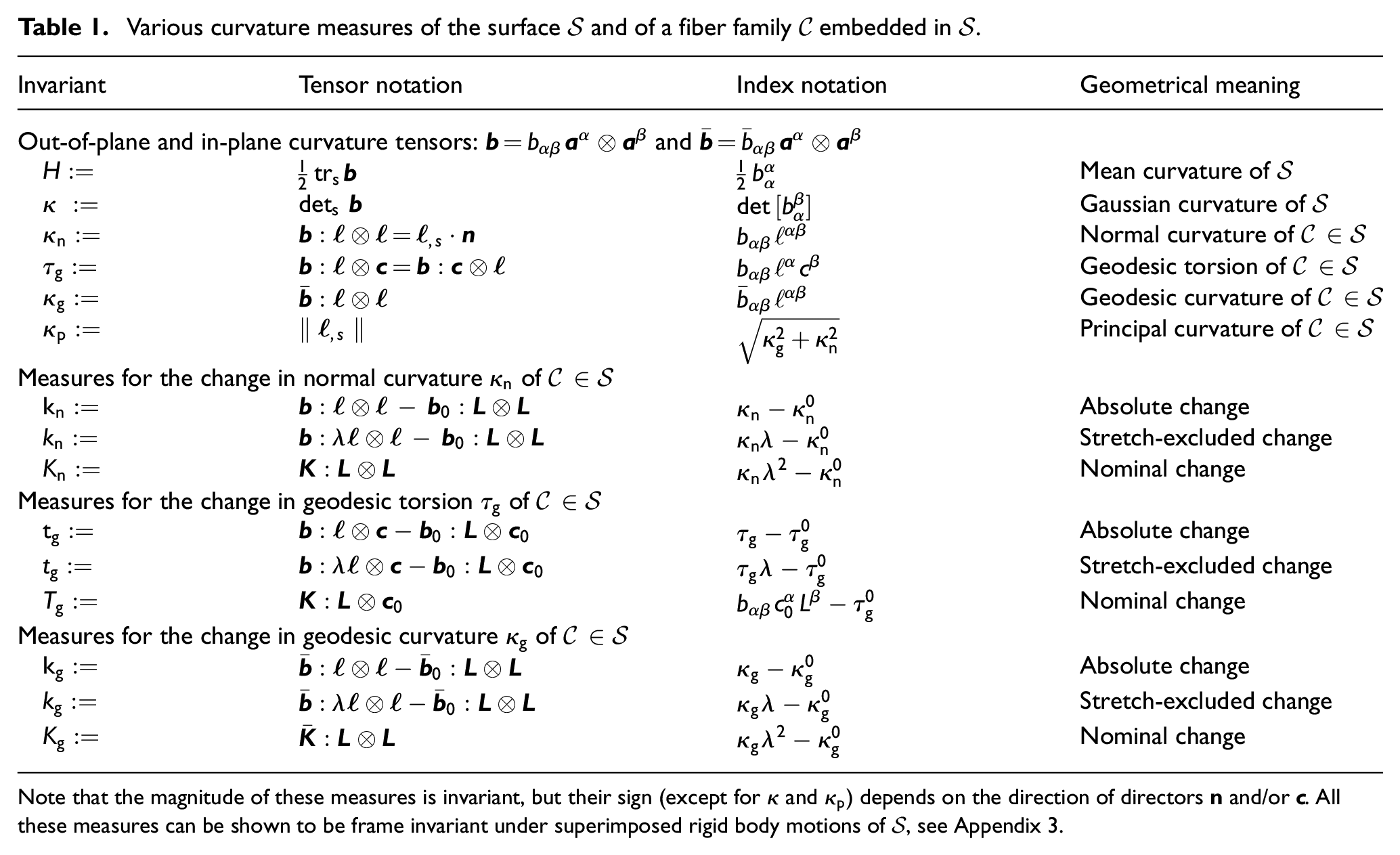
The mentioned invariants , , , and are included in Table 1. They are useful in constructing material models for (both isotropic and anisotropic) out-of-plane bending.
Various curvature measures of the surface and of a fiber family embedded in .
Invariant
Tensor notation
Index notation
Geometrical meaning
Out-of-plane and in-plane curvature tensors: and
Mean curvature of
Gaussian curvature of
Normal curvature of
Geodesic torsion of
Geodesic curvature of
Principal curvature of
Measures for the change in normal curvature of
Absolute change
Stretch-excluded change
Nominal change
Measures for the change in geodesic torsion of
Absolute change
Stretch-excluded change
Nominal change
Measures for the change in geodesic curvature of
Absolute change
Stretch-excluded change
Nominal change
Note that the magnitude of these measures is invariant, but their sign (except for and ) depends on the direction of directors and/or . All these measures can be shown to be frame invariant under superimposed rigid body motions of , see Appendix 3.
2.3. Curvature of embedded curves
We aim at capturing any geodesic torsion, normal and in-plane curvature of an embedded curve . As seen in equations (21) and (22), the normal curvature and geodesic torsion of can already be described via the out-of-plane curvature tensor (11). The in-plane curvature, on the other hand, does not follow from tensor . Instead, it can be extracted from the so-called curvature vector of that is defined by the directional derivative of in direction , that is,
Here and henceforth, denotes the surface gradient operator.4 Following equation (6) and considering equations (4) and (16), derivative can be expressed as
where the semicolon denotes the covariant derivatives
The magnitude is called the principal curvature of ,5 and the direction is referred to as the principal normal to . Note that is normal to the curve but not necessarily normal to the surface .
In principle, vector can be expressed in any basis, which then induces different curvatures from the corresponding components. Here, we express in the basis , that is,
where
denotes the normal curvature of . By inserting equations (23) and (24), can be shown to be identical to equation (21). On the other hand,
is the in-plane (i.e. geodesic) curvature of . It can be computed by inserting equations (23) and (24) into equation (28), giving
Remark 2.2. The three scalars , , and are associated with the three bending modes of : normal (i.e. out-of-plane) bending, geodesic (i.e. in-plane) bending, and geodesic torsion, respectively.
2.4. Definition of the in-plane curvature tensor
In principle, we can use the second-order tensor to characterize the in-plane curvature as the counterpart to tensor from equation (11), which characterizes the out-of-plane curvature. Tensor is, however, unsymmetric. We thus construct an alternative tensor by rewriting equation (29) and using identity that follows from , so that
where
similar to equation (25). Here, we have defined the so-called in-plane curvature tensor of as
Components thus can be computed from
where
The last equation is obtained from identities , , and equations (24) and (13). The quantities , , , and can be shown to be frame invariant under superimposed rigid body motions of , see Appendix 3.
Remark 2.3. Since vector is normalized, we have the identity
To characterize the shell deformation, a reference configuration is chosen. The tangent vectors , the normal vector , the surface metric , the out-of-plane curvature tensor are defined on similar to equations (2), (3), (5), and (11), respectively.The fiber embedded within the shell surface is denoted by in the reference configuration. Also, the normalized fiber direction , the in-plane fiber director , and the in-plane curvature tensor are defined similar to equations (6), (7), and (34), respectively.
Having , , and the deformation of a shell can now be characterized by the following three tensors:
1. The surface deformation gradient:
This tensor can be used to map the reference fiber direction to as
where is the fiber stretch. Comparing equations (6) and (41) gives
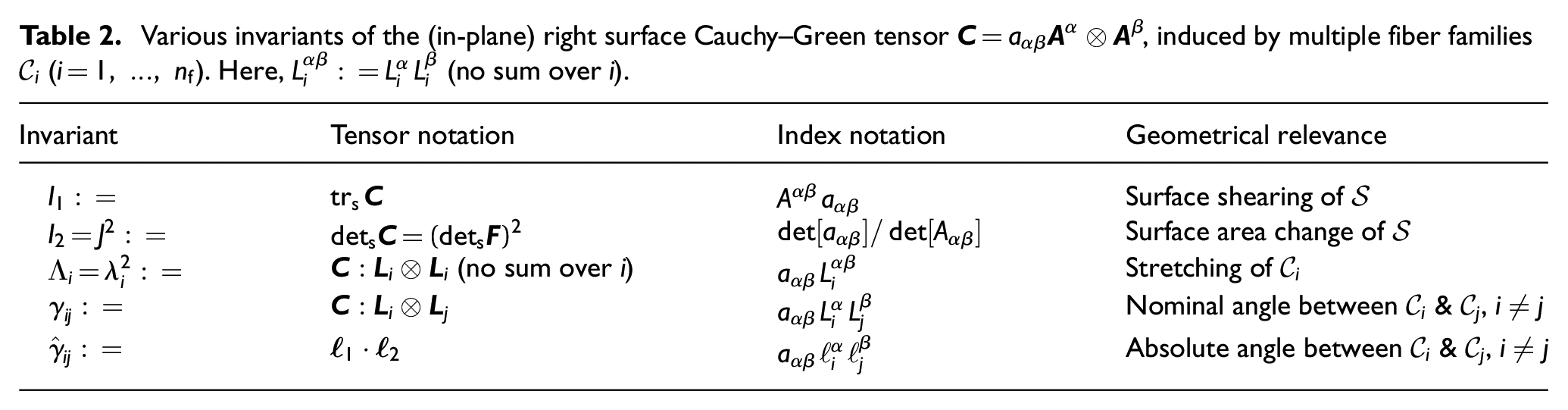
With the surface deformation gradient, the right Cauchy–Green surface tensor is defined by . Table 2 lists some invariants induced by that can be useful for constructing material models. The Green–Lagrange surface strain tensor, which represents the change of the surface metric, is then defined by
2. The change of the out-of-plane curvature tensor:
Various invariants of the (in-plane) right surface Cauchy–Green tensor , induced by multiple fiber families (). Here, (no sum over ).
Invariant
Tensor notation
Index notation
Geometrical relevance
Surface shearing of
Surface area change of
(no sum over )
Stretching of
Nominal angle between & ,
Absolute angle between & ,
Accordingly, the geodesic curvature follows from equation (32) as
Furthermore, using relation , similar to equation (25.1)—where denote the Christoffel symbols of the initial configuration—equation (50) can be rewritten as
where and .
Remark 2.4. As seen in equation (51), the geodesic curvature involves the change not only in the Christoffel symbols (term ), but also the gradient of (term ). For initially straight fiber, the geodesic curvature becomes
as vanishes. But for initially curved fibers, where , expression (51) should be used. This point will be demonstrated in section 7.1.
Remark 2.5. To measure the change in the curvatures, one can use the invariants
called the absolute change in the normal curvature, geodesic curvature, and geodesic torsion, respectively. Here, denotes the corresponding quantities in the initial configuration.
Remark 2.6. However, the curvature changes (equation (53)) are not ideal for constitutive models, as they can lead to unphysical stress couples that respond to fiber stretching even when there is no bending. An example is pure dilatation, for example, due to thermal expansion or hydrostatic stress states as is discussed in example 7.4. To exclude fiber stretching, we define the invariants
called the stretch-excluded change in the normal curvature, geodesic curvature, and geodesic torsion, respectively.
Remark 2.7. Both curvature changes (53) and (54) can cause fiber tension apart from fiber bending. Therefore, one can use the so-called nominal change in the normal curvature, geodesic curvature, and geodesic torsion, defined by
where and are defined by equations (47) and (48), respectively. These invariants can also be found, for example, in the works by Steigmann and Dell’Isola [1] and Schulte et al. [36]. Since the measures (equation (55)) do not cause an axial tension in the fibers, their material tangents simplify significantly. Note however that, like equation (53), they can cause unphysical stress couples responding to fiber stretching.
Remark 2.8. The mentioned curvature measures (equations (53), (54), and (55)) are also listed in Table 1. It should be noted that all these measures are equivalent for inextensible fibers, that is, , which is usually assumed for textile composites.
3. Balance laws
In this section, we discuss the balance laws for fibrous thin shells taking into account not only in-plane stretching and out-of-plane bending, but also in-plane bending. Like in classical Kirchhoff–Love shell theory, we directly postulate linear and angular momentum balance for our generalized Kirchhoff–Love shell with in-plane bending. Although the presented theory is not derived from general Cosserat theory, we show in Appendix 4 that our set of balance equations is consistent with that of Cosserat shell theory.
We consider that the out-of-plane shear energy and the out-of-plane thickness strain energy are negligible. The first condition amounts to the Kirchhoff–Love kinematical assumption of zero out-of-plane shear strains. The second condition is satisfied here by the plane stress assumption (i.e. zero thickness stress), which is commonly used for thin shells. It still allows for thickness changes, for example, due to large membrane stretching. Note, however, that these assumptions on the shear strains and thickness stress are mathematically independent of the thickness, so that the governing equations can be written directly in surface form without the need of a thickness variable. Instead, the influence of the thickness appears in the constitutive equations [2,5,10,11].
In the following, we first discuss in detail the theory with one embedded fiber family . The extension to multiple fiber families is straightforward and will be discussed subsequently.
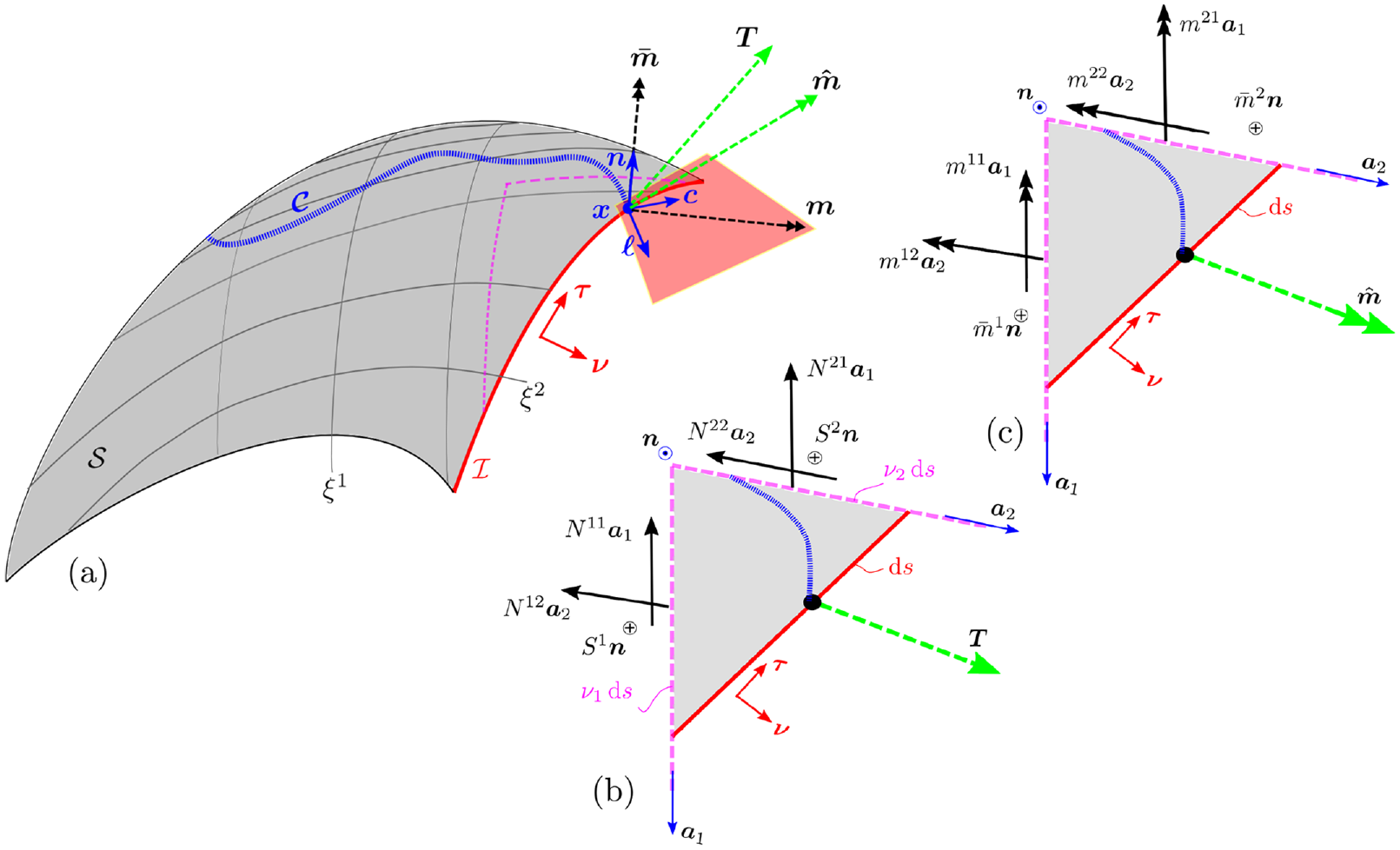
In order to define internal stresses and internal moment tensors, the shell is virtually cut into two parts at position as depicted in Figure 2. On the parametrized cut, denoted by , we define the unit tangent vector and the unit normal at .
Internal stresses and moments: (a) illustration of physical traction vector and moment vector acting on the cut (red curve) through surface with its embedded fiber (blue curve). Both and are general vectors in 3D space. The moment vector can be decomposed into the component , causing in-plane bending, and the component , causing out-of-plane bending and twisting. Vectors , , , , and lie in the tangent plane of . (b) Stress and (c) moment components appearing on a triangular element—which is in force and moment equilibrium—under the action of the traction and moment , respectively. These stress and moment components appear on the cuts that intersect with the tangent plane (pink dash lines). Assuming plane stress conditions, the stress and moment on any cut perpendicular to the surface normal (gray area) are neglected for the equilibrium of the triangular element.
3.1. Stress tensor
This section discusses Cauchy stress tensor for thin shells under plane-stress conditions. The influence of angular momentum balance on the stress tensor is then discussed in section 3.4.
The traction vector appearing on the cut can have arbitrary direction (see Figure 2(b)), but we can generally express it with respect to the basis as
where and are the contravariant components of . This traction induces the Cauchy stress tensor . Following Cauchy’s theorem, the components of are balanced by the traction on an infinitesimal triangular element, as shown in Figure 2(b). Under plane-stress conditions, all stresses on any cut perpendicular to surface normal are neglected for the (force) equilibrium of the triangular element. That is, the components of tensor associated with bases and are considered to be zero. This results in the asymmetry of tensor in the form,
where and are the membrane stress and out-of-plane shear stress components of . Accordingly, the components of on the cross-section perpendicular to are defined by
which is illustrated in Figure 2(b) for an infinitesimal triangular element on . With this, we can write
Furthermore, the force equilibrium of the triangle (see Figure 2(b)) gives
Remark 3.1. Due to the presence of transverse shear components , the traction vector has both in-plane and out-of-plane components as is seen from equation (56) and (62). As shown in section 3.4, in general, in equation (57) is not symmetric according to angular momentum balance. Instead, the so-called effective stress—denoted by and defined in equation (93)—is symmetric according to angular momentum balance.
Remark 3.2. The format of the Cauchy stress (57) also contains all the stresses within a cut fiber. Indeed, consider a fiber described by beam theory. According to beam theory, all stresses are neglected on a cut parallel to the fiber. Accordingly, the stress tensor in the fiber —denoted by —can be written as
where , , and denote the axial stress and the two shear stresses. By inserting the basis vectors , and , equation (63) becomes
with
3.2. Generalized moment tensor
This section discusses the moment tensor for Kirchhoff–Love shells with in-plane bending. Also, equivalent stress couple tensors and are defined by introducing stress couple vectors that are equivalent to the in-plane and out-of-plane bending moments.
At position on cut (see Figure 2(c)), the bending moment vector, denoted by (with unit moment per unit length), is allowed to have both in-plane and out-of-plane components. It can be expressed with respect to basis as
denotes the combined moment causing out-of-plane bending and twisting.
Similar to the Cauchy stress tensor (equation (57)), all moments on a cut perpendicular to surface normal are zero under Kirchhoff–Love assumptions. The total moment tensor induced by can thus be expressed in the form
In this form, the first term combines both out-of-plane bending and twisting in response to a change in the out-of-plane curvature of , while the second term is the response to a change in the in-plane curvature of fiber .
The components of , on the cross-section perpendicular to , thus read as (see Figure 2(c))
Here, moment vectors and are associated with the angular velocity vector around the in-plane axis
and the out-of-plane axis , respectively. Therefore, it is mathematically convenient to express with respect to the basis , that is,
where and denote the components of vectors in directions and , respectively. Here, we have defined the so-called stress couple vectors for out-of-plane and in-plane bending8
Similar to equation (61), moment equilibrium of the triangle (see Figure 2(c)) results in Cauchy’s formula
where
are referred to as the stress couple vectors associated with out-of-plane and in-plane bending, respectively. By comparing equations (74) and (66), the stress couple vectors and can be related to their moment vector counterparts by
In line with previous works, see, for example, Sauer and Duong [10], we can also define the stress couple tensors,8
associated with out-of-plane and in-plane bending, respectively. In view of eqution (74), we obtain the mapping
In order to relate the components of the moment vector (equation (66)) to the components of the stress couple tensors, we can equate equations (66) and (74). This results in
where we have used the relations due to .
Remark 3.3. Similar to equation (63), the moment tensor for a fiber described by beam theory—denoted by —can also be written in the form of equation (68), that is,
Here, , , and denote twisting, out-of-plane bending, and in-plane bending moments in fiber , respectively, and we have identified
Remark 3.4. Furthermore, inserting from equation (81) into equations (72.3) and (79.3) gives
Therefore, we can conclude that is symmetric. Note that does not depend on the cut since it is a component of the internal moment tensor, but does depend on as seen in equation (82.2). For example, when the cut is parallel to the fiber, that is, when .
3.3. Balance of linear momentum
Consider body forces acting on an arbitrary simply-connected region . The balance of linear momentum implies that the temporal change of linear momentum is equal to the resultant of all acting external forces. That is,
where denotes the material velocity of the surface. Inserting from equation (61), and applying the surface divergence theorem and conservation of mass, one obtains the local form of linear momentum balance
where denotes the surface divergence operator, defined by Note that equation (84) can also be written in the form [10]
The balance of angular momentum implies that the temporal change of angular momentum is equal to the resultant of all external moments. That is,
where includes both in-plane and out-of-plane bending moments acting on . From equations (61) and (74), the surface divergence theorem gives
and
Inserting these equations into equation (87) and applying local mass conservation gives
The second integral in equation (90) vanishes due to equation (84). This leads to the local form of the angular momentum balance,
Keeping equation (82.1) in mind, the surface divergence of tensor follows from equation (73) as
where we have used . Inserting equations (92) and (58) into equation (91) then implies that the so-called effective membrane stress9
is symmetric, and that the shear stress is given by
Thus, angular momentum balance implies the symmetry of the effective stress instead of the Cauchy stress . The latter is only symmetric when there is no in-plane and out-of-plane bending resistance.
Remark 3.5. The last term in stress expression (93) relates to the in-plane shear force in the fiber, which, in accordance with the assumed Euler-Bernoulli kinematics, follows as the derivative of the in-plane bending moment.
3.5. Mechanical power balance
The mechanical power balance can be obtained from local momentum balance (eqation (84)). To this end, we can write
Here, the divergence term can be transformed by the identity
denotes the external power. The last term in can be written in alternative forms, as is discussed in the following section. The mechanical power balance (equation (101)) simplifies to the expression in Sauer and Duong [10] for and .
4. Work-conjugate variables and constitutive equations
As seen from expression (103), the internal stress power per current area reads
which directly shows work-conjugate pairs. Accordingly, is a strain measure for the change in the in-plane curvatures. As shown in Appendix 3, the strain measure is frame invariant under superimposed rigid body motion of the shell. However, it is somewhat unintuitive and thus inconvenient for the construction of material models. In the following, we will present two approaches with alternative definitions of this strain measure.
4.1. Geodesic curvature-based approach
This approach uses the geodesic curvature instead of within the in-plane bending power. Namely, inserting from equation (81.2) into equation (105) and rearranging terms gives
Here, represents the components of an effective membrane stress tensor.10 It is symmetric as both and are symmetric. The internal power (103) then becomes
where and
These are the nominal quantities corresponding to the physical quantities , , and , respectively. Accordingly, we can assume a stored energy function of an hyperelastic shell in the form
where collectively represents the components of the structural tensor(s), for example, , , or, , that characterize material anisotropy due to embedded fibers. Equation (109) can equivalently be expressed in terms of invariants. All the strain measures , , , and used in equation (109) are frame invariant under superimposed rigid body motions as shown in Appendix 3. Using the usual arguments of Coleman and Noll [38], the constitutive equations can be written as
Remark 4.1. Compared to classical Kirchhoff–Love shell theory (see, for example, Naghdi [2] and Sauer and Duong [10]), the effective membrane stress in equation (106.2) additionally contains the high-order bending term and the in-plane fiber shear term (see equation (93)). For slender fibers, they are negligible since the in-plane bending stiffness is usually much smaller than the membrane stiffness. However, these terms may become significant when there is a large (usually local) change in curvature (e.g. at shear bands).
Remark 4.2. Although a constitutive formulation following from equation (107) appears elegant, expression (110.3) is restricted to a material response expressible in terms of the geodesic curvature . Therefore, this setup might be unsuited for complex material behavior, for example, due to fiber dispersion [21]. In such cases, a more sophisticated structural tensor is usually desired for the in-plane bending response, and it thus may not always be possible to express in terms of . This motivates the following director gradient-based approach.
Remark 4.3. In equation (110), the stress components and , together with the strain components and in equation (109), are defined in the parameter space , where they can be treated as independent variables without forming them into tensors. It is possible, though, to construct different stress and strain tensors from these components, such that their scalar product results in the same power as in equation (107). For example, can be the components of the Kirchhoff surface stress tensor , the second Piola–Kirchhoff stress tensor , or the first Piola–Kirchhoff stress tensor but with different bases. Indeed, , and . The strain variables work-conjugate to , , and are related to the rate of surface deformation tensor , the Green–Lagrange surface strain tensor (or C ), and the surface deformation gradient tensor , respectively, since . See also Remark 4 in [39].
4.2. Director gradient-based approach
In this approach, the power expression (105) is rewritten by employing relation (38) and definitions (72.3) and (34) as
Accordingly, the stored energy function can now be given in the form
This function can also be expressed equivalently in terms of invariants, and can be shown to be frame invariant, see Appendix 3. The corresponding constitutive equations now read
Remark 4.4. Compared to equation (109), expression (115) allows to model more complex in-plane bending behavior using a generalized structural tensor applied to . We therefore consider this setup in the following sections.
Remark 4.5.Equation (113) can also be written in tensor notation as
where , , and are the strain tensors defined by equations (46), (47), and (48), respectively, and
are the effective second Piola–Kirchhoff surface stress tensor, and the nominal stress couple tensors associated with out-of-plane and in-plane bending, respectively. They are symmetric and follow from the pull-back of tensors , and in equations (112) and (77).
Remark 4.6. In view of internal power expression (117), an alternative form of the stored energy function, apart from equation (115), is
where denotes the structural tensor(s). However, since the temporal change of , , and only depends on , , and , respectively, the energy form (equation (119)) is equivalent to equation (115), that is, . Therefore, the stress and moment tensors (118) can be determined either from
Remark 4.7. Balance equation (101) and various constitutive equations such as (120), (116), and (110) have been expressed directly in surface form without introducing a thickness variable. The unit of the strain energy is thus energy per reference area. However, the influence of the thickness is still present—either in the material parameters of the surface form or via a through-the-thickness integration of 3D constitutive laws [11,40]. In a surface formulation, the thickness strain can be still determined from various approaches: One can enforce incompressibility or the plane stress condition [11], or one can introduce an additional degree-of-freedom [41].
4.3. Comparison with existing second-gradient theory of Kirchhoff–Love shells
To show the consistency of our proposed theory with the existing second-gradient theory of Steigmann [34] we insert obtained from equation (51) into the power expression (107). This results in the expression (see Appendix 5)
where . The last term in equation (121) is the power due to in-plane fiber bending. Here, the relative Christoffel symbol is the chosen strain measure for the in-plane curvature, and is the in-plane bending moment corresponding to a change in .
In the first term of equation (121), denotes the effective stress vectors that are work-conjugate to , with now being defined by
which is generally unsymmetric. Therefore, in contrast to expressions (107) and (113), the effective stress is generally unsymmetric here. With a possible loss of generality, its symmetrization is adopted in the work by Steigmann [34], that is, , so that the internal power becomes
which is equivalent to expression (63) in Steigmann [34].11
Remark 4.8. As shown in Appendix 5, the asymmetry of the effective stress (122) is due to the fact that it still contains in-plane bending apart from surface stretching. It is unsymmetric even for initially straight fibers in a general setting. Therefore, the symmetrization employed in Steigmann [34] is valid only for special cases.
Remark 4.9. The power term in the gradient theory of Steigmann [34] can become ill-defined for initially curved fibers when approaches zero even though there is a change in geodesic curvature. This can solely result from the choice of parametrization, as seen, for example, in section 7.1. In contrast, the internal power expressions (103), (107), and (113) presented above overcome this limitation.
4.4. Extension to multiple fiber families
In case of fiber families , , we define the tangent and director for each . The in-plane curvatures (equation (48)) and the moment in equation (66) are then defined for each fiber family . Then in equation (113) simply becomes
This function can equivalently be expressed in terms of the invariants, for example, as
since all these invariants are functions of , , and . The constitutive equations thus read
where are the components of the nominal stress couple tensor associated with in-plane bending of fiber . They correspond to the change in the in-plane curvature of fiber .
5. Constitutive examples
This section presents constitutive examples for the presented theory considering unconstrained and constrained fibers. We restrict ourselves here to two families of fibers. Note, however, that our approach allows for any number of fiber families.
5.1. A simple generalized fabric model
A simple generalized shell model for two-fiber-family fabrics that are initially curved and bonded to a matrix is given by
where
are the strain energies for matrix deformation, fiber stretching, out-of-plane and in-plane fiber bending, fiber torsion, and the linkage between the two fiber families, respectively. is the surface dilatation energy. In the above expression, , , , , and denote the fiber stretch, the norminal change in geodesic fiber torsion, normal fiber curvature and geodesic fiber curvature, and the relative angle between fiber families, respectively (see Tables 1 and 2). Symbols , , and are material parameters. can be taken as zero during fiber compression () to mimic buckling phenomenologically.
From equations (116) and (129), we then find the effective stress and moment components for the director gradient-based formulation (section 4.2) (see Appendix 2 and Sauer and Duong [10] for the required derivatives of kinematical quantities) as
where denotes symmetrization.
5.2. Fiber inextensibility constraints
For most textile materials, the deformation is usually characterized by very high tensile stiffness in fiber direction and low in-plane shear and bending stiffness. In this case, one may model the very high tensile stiffness along the fiber direction by the inextensibility constraint
where is defined in Table 2. This constraint then replaces the term in equation (128). To enforce this constraint, we can employ the Lagrange multiplier method in the strain energy function
where () denote the corresponding Lagrange multipliers. The stress components in this case become
This leads to the same stress and moment components as in equation (130.1) with the exception that is now replaced by .
6. Weak form
This section presents the weak form for the generalized Kirchhoff–Love shell. The weak form is obtained by the same steps as the mechanical power balance in section 3.5, simply by replacing velocity by variation . This gives
Using equation (127), can also be expressed as the variation of potential (125) w.r.t. its arguments,
For constrained materials, for example, equation (132), becomes
For the constitutive example in section 5, , and are given by equations (133), (130.2), and (130.3), respectively, while .
The linearization of weak form (134) and its discretization can be found in the work by Duong et al. [37].
7. Analytical solutions
This section illustrates the preceding theory by several analytical examples considering simple homogeneous deformation states. They are useful elementary test cases for the verification of computational formulations.
7.1. Geodesic curvature of a circle embedded in an expanding flat surface
The first example presents the computation of geodesic curvature from equations (51) and (52) and confirms that only equation (51) gives the correct value for initially curved fibers. This illustrates the limitation of existing second-gradient Kirchhoff–Love shell theory for cases where due to the choice of the surface parametrization.
To this end, we consider a circular fiber with initial radius expanding according to the deformation gradient to with the current radius as shown in Figure 3. Therefore, the geodesic curvatures of and are expected to simply be and , respectively.
Computation of geodesic curvature : A circular fiber is embedded in the planar surface that is expanded by the homogeneous deformation .
With respect to the convective coordinates , shown in Figure (3(left)), the position vector on any point of and can be represented by
The surface tangent and normal vectors follow from equation (138) as
so that
The surface deformation gradient then reads
and the surface Christoffel symbols take the form
In the reference configuration, the fiber is parametrized by the arc-length coordinate as
Inserting these expressions into equation (51), and using the identity gives the geodesic curvature
For , setting directly yields .
In contrast, equation (52) obviously fails to reproduce the correct geodesic curvatures since the Christoffel symbols are zero everywhere solely due to the choice of the surface parametrization. Furthermore, since , the in-plane bending term of the internal power is ill-defined in second-gradient theory (equation (123)), whereas we get a well-defined power from equation (51) with equations (103), (107), and (113). It correctly captures the change in geodesic curvature.
7.2. Biaxial stretching of a sheet containing diagonal fibers
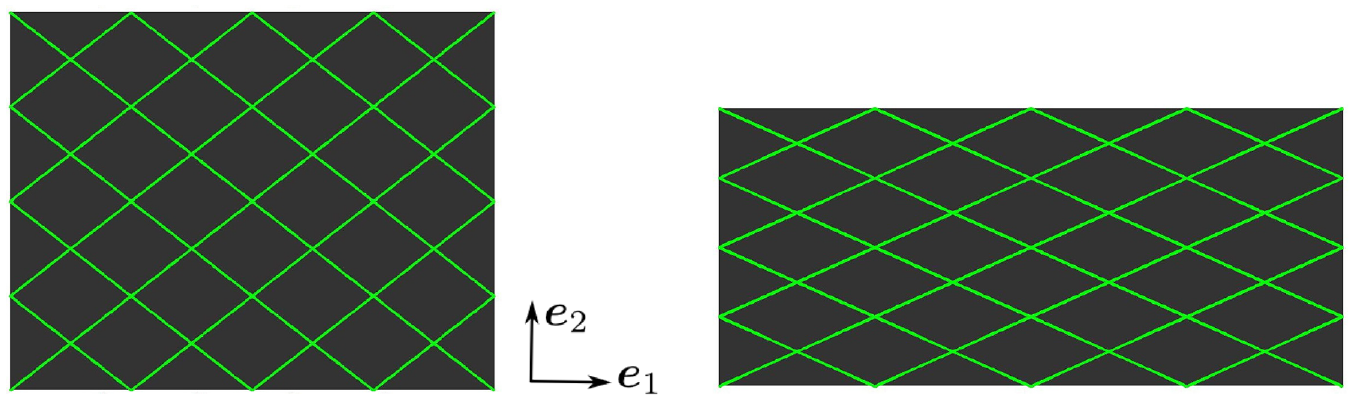
The second example presents an analytical solution for homogeneous biaxial stretching of a rectangular sheet from dimension to , such that and . The sheet contains a matrix material and two fiber families distributed diagonally as shown in Figure 4. The strain energy function in this example is taken from equation (129) as
Biaxial stretching of a rectangular sheet from dimension (left) to (right).
Therefore, the stress components follow as
where denotes the nominal fiber tension. The parameterization can be chosen such that the surface tangent vectors are , , , and , where are the basis vectors shown in Figure 4. The fiber directions are , , where . We thus find
Furthermore, we find the fiber stretch and angles
Inserting equation (151) into equation (149) gives the stress tensor , where The resultant reaction forces at the boundaries then follow as
where .
Remark 7.1. The presented solution (152) includes pure shear by simply setting .
Remark 7.2. For uniaxial tension, for example, in the direction and with free horizontal boundaries, condition in equation (152.2) gives the solution of , which in turn can be inserted to equation (152.1) for the resultant reaction force as
where
while , and .
Remark 7.3. Solution (152) also captures the inextensibility of fibers. In this case, either the vertical or the horizontal boundaries have to be stress free. In the latter case, and
due to . In this case, the deformation is limited by . From , the nominal fiber tension now follows as
Inserting equation (156) into equation (152.1) then gives
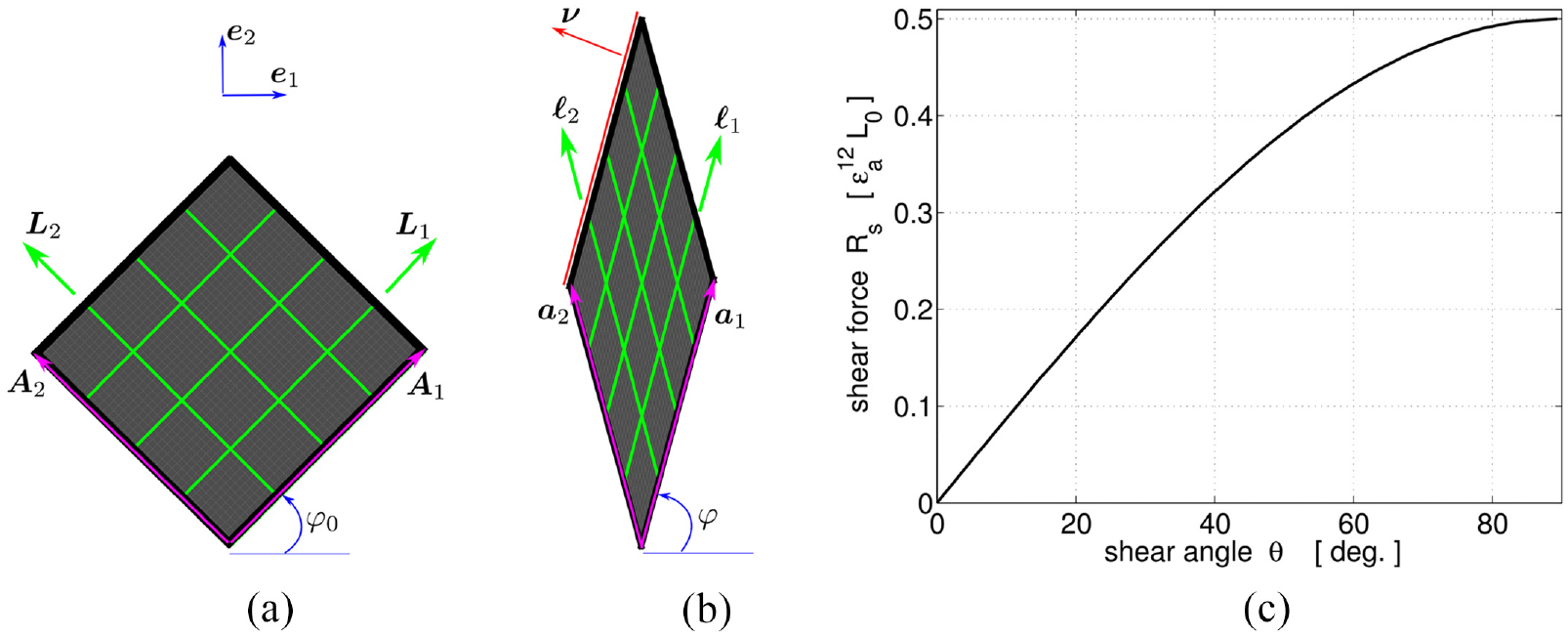
7.3. Picture frame test
The third example derives an analytical solution for the shear force in the picture frame test of an square sheet with two fiber families as shown in Figure 5(a) and (b). From the figure, we find the surface tangent vectors
and the fiber directions
where . Accordingly, the components of tensors and read
respectively. From equation (160.1), the surface stretch is found as
Picture frame test: (a) initial and (b) deformed configurations containing two fiber families. (c) Exact solution of the shear force versus shear angle .
Furthermore, the strain energy function in this example is taken from equation (129) as , so that the Cauchy stress components are
Here, we have used equations (160.2) and (161), , and .
Consider the upper left edge with normal vector , where , and . The traction components on this edge can be computed from
Therefore, the traction vector solely contains the shear contribution
so that the shear force (i.e. the tangential reaction) at the edge of the sheet is
where denotes the shear angle. This solution is plotted in Figure 5(c).
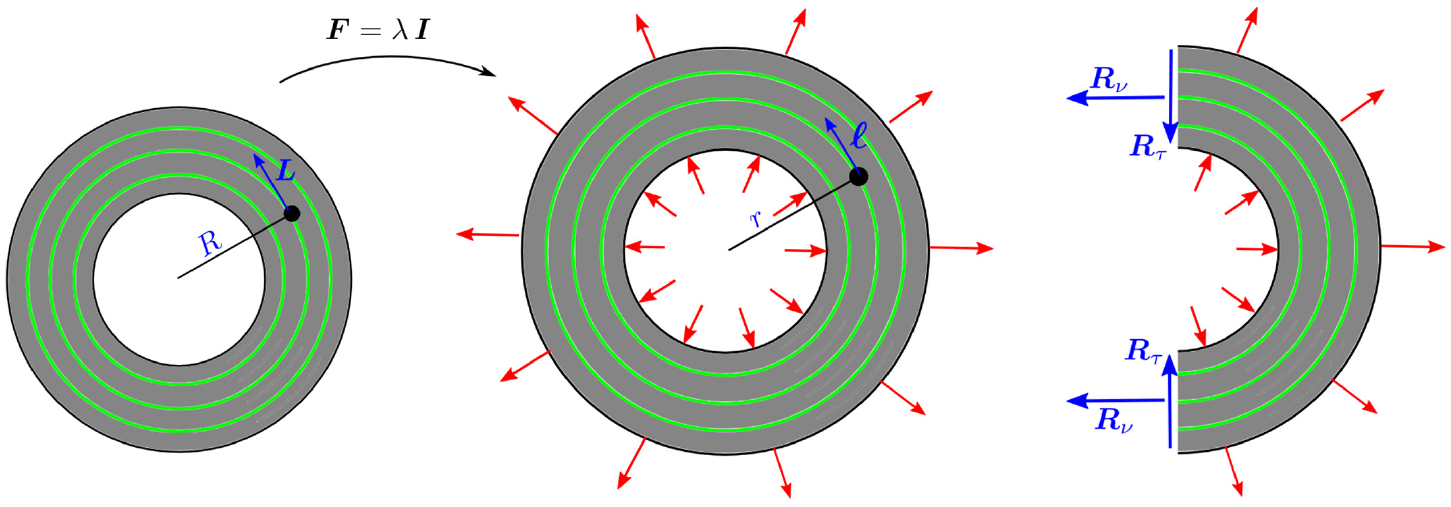
7.4. Annulus expansion
The fourth example presents an analytical solution for the expansion of an annulus containing distributed circular fibers and matrix material as depicted in Figure 6.
Annulus expansion: An annulus containing matrix (gray color) and distributed circular fibers (green color) is expanded homogeneously from its initial configuration (left) by applying Dirichlet boundary condition on both inner and outer surfaces (middle). The expansion causes the resultant interface forces and on the cut through a symmetry plane (right).
The inner and the outer rings with radius and , respectively, are expanded to and by the constant stretch . The strain energy density (per reference area) is taken as
where
Here, , , and are material parameters for matrix dilatation, fiber bending, and fiber stretching, respectively, and , , and are invariants induced by tensors and as listed in Tables 1 and 2.
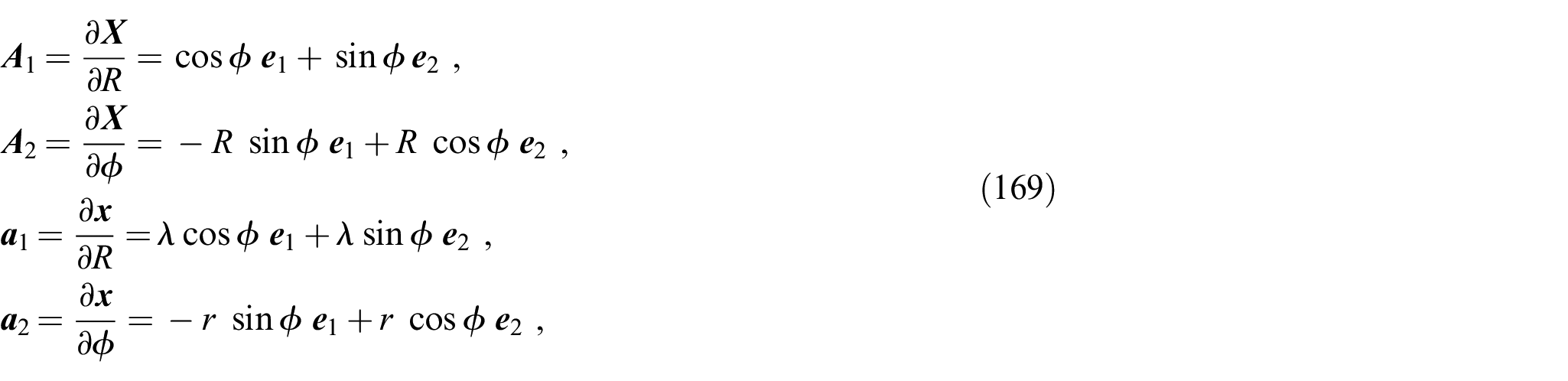
7.4.1. Kinematical quantities
According to Figure 6, the initial and current configurations as well as the initial fiber direction can be described by
Here , due to the homogeneous deformation, with being the fiber stretch. From this, we find the covariant tangent vectors
and the constant surface normal during deformation. From the tangent vectors, we get
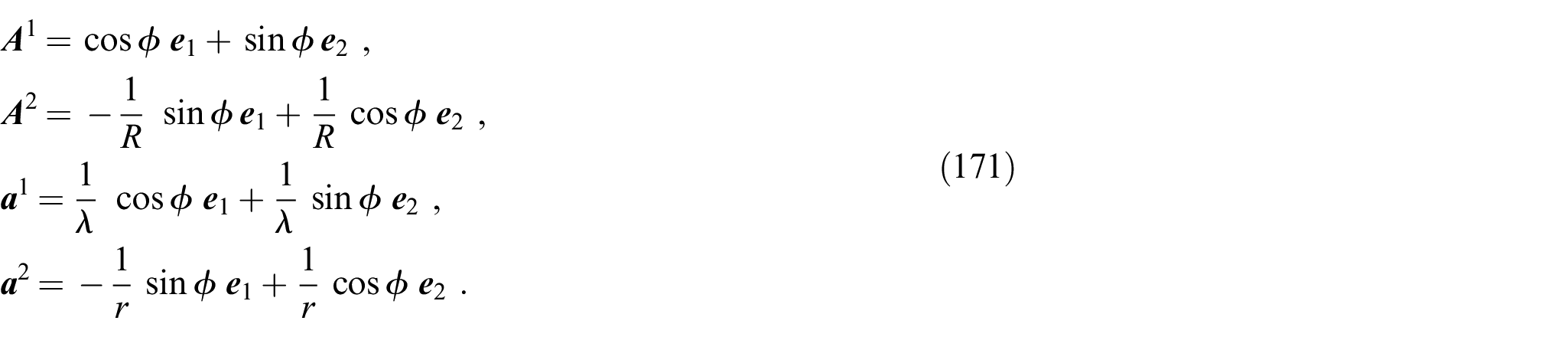
and thus the contravariant tangent vectors take the form
The initial and current fiber direction thus can be expressed as
with
The components of the structural tensors and thus read
Furthermore, the fiber director is obtained as
with
Therefore, its derivatives read
From equation (35) then follow the components of the in-plane curvature tensor in the current configuration as
Similarly, we find the in-plane curvature tensor in the initial configuration as
Accordingly, the current geodesic curvature can be computed from equation (32) as
Similarly, we can verify that the initial geodesic curvature satisfies . These results lead to , and thus due to the particular choice of strain energy (equation (167.2)). This means that the change in the geodesic curvature in this example is purely due to fiber stretching and not due to fiber bending.
7.4.2. Analytical expression for the reaction forces
From equation (166), we find the effective membrane stress
Here, the component of the Cauchy stress tensor is since (see equation (112) with equation (93)). Its mixed components thus read
where we have inserted and from equations (170) and (174), respectively. It can be verified that for a homogeneous deformation , the local equilibrium equation is satisfied for the functionally graded surface bulk modulus
Furthermore, the resultant reaction force at the cut in Figure 6 (right) can be computed by
since and . Here, denotes the traction acting on the cut. Therefore, we get
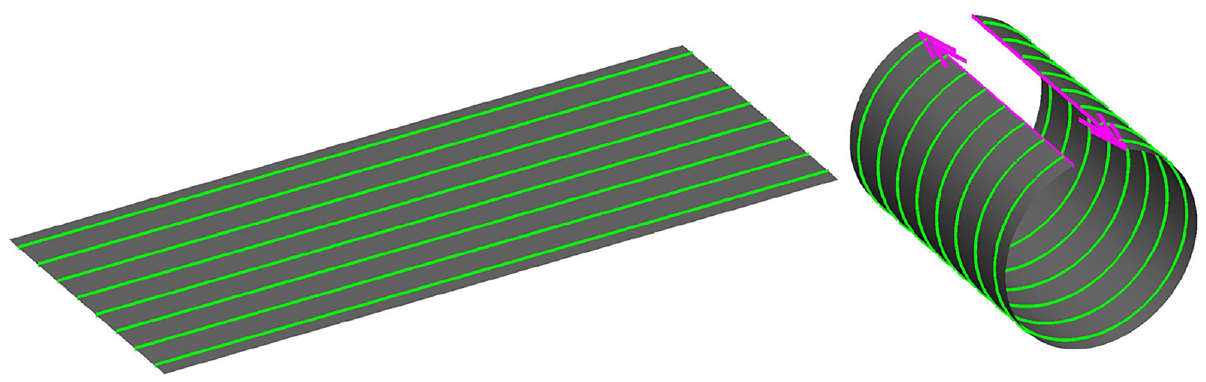
The last example presents the analytical solution for the pure bending of a flat rectangular sheet with dimension , subjected to an external bending moment along the two shorter edges, as shown in Figure 7. This problem was solved by Sauer and Duong [10] for an isotropic material, and here we additionally consider the influence of fiber bending. For simplicity the fibers are aligned along the bending direction. The strain energy function is taken from (129), which reduces to
in this example.
Pure bending: Deformation of a rectangular sheet (left) into a circular arc (right).
7.5.1. Kinematical quantities
We extend the kinematical quantities derived in the work by Sauer and Duong [10] to account for embedded fibers. The sheet is parametrized by and . Bending induces (high-order) in-plane deformation, such that the current configuration has dimension . The stretches along the longer and shorter edges are and , respectively, and we have relations and , where is the homogeneous curvature of the sheet.
With this, the sheet in the initial and current configurations, and the initial fiber direction can be described by
Therefore, the initial and current tangent vectors, and current normal vector are
From these, we find the components of the structural tensor
the surface metrics
the surface stretch and the components of the curvature tensor
Therefore, the nominal change in the normal curvature is
7.5.2. Analytical relation between external moment and mean curvature
From the second equation follows . The distributed external moment is in equilibrium to the distributed internal moment —see equation (79.2)—on any cut parallel to the shorter edge. We therefore have
where , , and . By combining equations (199) and (198.1), we get an expression for in terms of
With this result and equation (199), we obtain the relation between the external moment and the mean curvature,
8. Conclusion
We have presented a generalized Kirchhoff–Love shell theory capable of capturing in-plane bending of fibers embedded in the surface. The formulation is an extension of classical Kirchhoff–Love shell theory that can handle multiple fiber families, possibly with initial curvature. We use a direct approach to derive our theory assuming Kirchhoff–Love kinematics, plane-stress conditions, and lumped mass at the mid-surface. Like classical Kirchhoff–Love shell theory, no additional degrees-of-freedom are required such as the independent director fields of Cosserat shell theory, and the postulated set of balance laws for the shell only include linear and angular momentum balance.
Our thin shell kinematics is fully characterized by the change of three symmetric tensors: , , and the newly added —denoting the in-plane curvature tensor. These tensors capture the change of the tangent vectors , , and the in-plane fiber director . Tensor and director vector are defined for each fiber family separately. The corresponding stress and moments work-conjugate to , , and are the effective membrane stress , the out-of-plane stress couple , and the in-plane stress couple , respectively. The symmetry of follows from angular momentum balance. With these work-conjugated pairs, general constitutive equations for hyperelastic materials are derived.
The introduction of for the in-plane curvature measure is an advantage over existing second-gradient shell theory. Since it is a second-order tensor instead of a third-order tensor, its induced invariants and their physical meaning can be identified in a straightforward manner from the defined kinematics. Furthermore, it makes in-plane bending fully analogous to out-of-plane bending for both the internal and the external power. These features are advantageous in constructing material models and evaluating Neumann boundary conditions.
Finally this work also provides the weak form, which is required for a finite element formulation based on -continuous surface discretizations that are presented in future work [37]. Several analytical examples are presented to serve as useful elementary test cases for the verification of nonlinear computational formulations. The presented analytical examples also confirm that the model correctly describes the mechanics of shells with initially curved fibers.
Footnotes
Appendix 1
Appendix 2
Appendix 3
Appendix 4
Appendix 5
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors are grateful to the German Research Foundation (DFG) for supporting this research under grants IT 67/18-1 and SA1822/11-1.
ORCID iD
Roger A Sauer
Notes
References
1.
SteigmannDJDell’IsolaF. Mechanical response of fabric sheets to three-dimensional bending, twisting, and stretching. Acta Mech Sin2015; 31: 373–382.
2.
NaghdiPM. Finite deformation of elastic rods and shells. In: CarlsonDEShieldsRT (eds) Proceedings of the IUTAM symposium on finite elasticity. The Hague: Martinus Nijhoff Publishers, 1982, pp. 47–103.
LibaiASimmondsJG. The nonlinear theory of elastic shells. 2nd ed.Cambridge: Cambridge University Press, 1998.
5.
SteigmannDJ. Fluid films with curvature elasticity. Arch Rat Mech Anal1999; 150: 127–152.
6.
TepoleABKabariaHBletzingerK-U, et al. Isogeometric Kirchhoff-Love shell formulations for biological membranes. Comput Methods Appl Mech Engrg2015; 293: 328–347.
7.
WuMCZakerzadehRKamenskyD, et al. An anisotropic constitutive model for immersogeometric fluid-structure interaction analysis of bioprosthetic heart valves. J Biomech2018; 74: 23–31.
8.
RoohbakhshanFSauerRA. Efficient isogeometric thin shell formulations for soft biological materials. Biomech Model Mechanobiol2017; 16: 1569–1597.
9.
SteigmannDJ. On the relationship between the Cosserat and Kirchhoff-Love theories of elastic shells. Math Mech Solids1999; 4: 275–288.
10.
SauerRADuongTX. On the theoretical foundations of solid and liquid shells. Math Mech Solids2017; 22: 343–371.
11.
DuongTXRoohbakhshanFSauerRA. A new rotation-free isogeometric thin shell formulation and a corresponding continuity constraint for patch boundaries. Comput Methods Appl Mech Engrg2017; 316: 43–83.
12.
SauerRADuongTXMandadapuKK, et al. A stabilized finite element formulation for liquid shells and its application to lipid bilayers. J Comput Phys2017; 330: 436–466.
13.
KhiêmVNKriegerHItskovM, et al. An averaging based hyperelastic modeling and experimental analysis of non-crimp fabrics. Int J Solids Struct2018; 154: 43–54.
14.
FerrettiMMadeoADell’IsolaF, et al. Modeling the onset of shear boundary layers in fibrous composite reinforcements by second-gradient theory. Z Fürangew Math Phys2014; 65: 587–612.
15.
BoissePHamilaNGuzman-MaldonadoE, et al. The bias-extension test for the analysis of in-plane shear properties of textile composite reinforcements and prepregs: a review. Int J Mater Form2017; 10: 473–492.
16.
MadeoABarbagalloGD’AgostinoMV, et al. Continuum and discrete models for unbalanced woven fabrics. Int J Solids Struct2016; 94–95: 263–284.
17.
BarbagalloGMadeoAAzehafI, et al. Bias extension test on an unbalanced woven composite reinforcement: experiments and modeling via a second-gradient continuum approach. J Compos Mater2017; 51(2): 153–170.
18.
Dell’IsolaFGiorgioIPawlikowskiM, et al. Large deformations of planar extensible beams and pantographic lattices: heuristic homogenization, experimental and numerical examples of equilibrium. Proc R Soc A2016; 472(2185): 20150790.
19.
PlacidiLGrecoLBucciS, et al. A second gradient formulation for a 2D fabric sheet with inextensible fibres. Z Angew Math Phys2016; 67(5): 114.
20.
Dell’IsolaFSeppecherPSpagnuoloM, et al. Advances in pantographic structures: design, manufacturing, models, experiments and image analyses. Continuum Mech Thermodyn2019; 31(4): 1231–1282.
21.
GasserTCOgdenRWHolzapfelGA. Hyperelastic modelling of arterial layers with distributed collagen fibre orientations. J R Soc Interface2006; 3(6): 15–35.
MindlinR. Micro-structure in linear elasticity. Arch Ration Mech Anal1964; 16: 51–78.
29.
MindlinR. Second gradient of strain and surface-tension in linear elasticity. Int J Solids Struct1965; 1(4): 417–438.
30.
GermainP. The method of virtual power in continuum mechanics. Part 2: microstructure. SIAM J Appl Math1973; 25(3): 556–575.
31.
SpencerASoldatosK. Finite deformations of fibre-reinforced elastic solids with fibre bending stiffness. Int J Nonlin Mech2007; 42(2): 355–368.
32.
AsmanogloTMenzelA. A multi-field finite element approach for the modelling of fibre-reinforced composites with fibre-bending stiffness. Comput Methods Appl Mech Engrg2017; 317: 1037–1067.
33.
SteigmannDJ. Theory of elastic solids reinforced with fibers resistant to extension, flexure and twist. Int J Nonlin Mech2012; 47(7): 734–742.
34.
SteigmannDJ. Equilibrium of elastic lattice shells. J Eng Math2018; 109: 47–61.
35.
BalobanovVKiendlJKhakaloS, et al. Kirchhoff–Love shells within strain gradient elasticity: weak and strong formulations and an H3-conforming isogeometric implementation. Comput Methods Appl Mech Engrg2019; 344: 837–857.
36.
SchulteJDittmannMEugsterS, et al. Isogeometric analysis of fiber reinforced composites using Kirchhoff-Love shell elements. Comput Methods Appl Mech Engrg2020; 362: 112845.
37.
DuongTXItskovMSauerRA. A general isogeometric finite element formulation for rotation-free shells with in-plane bending of embedded fibers. Int J Numer Meth Engrg2022; 123: 3115–3147.
38.
ColemanBDNollW. The thermodynamics of elastic materials with heat conduction and viscosity. Arch Ration Mech Anal1964; 13: 167–178.
39.
SauerRAGhaffariRGuptaA. The multiplicative deformation split for shells with application to growth, chemical swelling, thermoelasticity, viscoelasticity and elastoplasticity. Int J Solids Struct2019; 174–175: 53–68.
40.
KiendlJHsuM-CWuMC, et al. Isogeometric Kirchhoff–Love shell formulations for general hyperelastic materials. Comput Methods Appl Mech Engrg2015; 291: 280–303.
41.
SimoJRifaiMFoxD. On a stress resultant geometrically exact shell model. Part IV: variable thickness shells with through-the-thickness stretching. Comput Methods Appl Mech Engrg1990; 81(1): 91–126.