
Abstract
In this paper, we represent second-gradient internal work functionals in Lagrangian (referential) and Eulerian (spatial) descriptions, and we deduce the corresponding expressions for the Piola transformations of stress and double-stress tensors and of external forces and double-forces. We also derive, in both the Eulerian and Lagrangian description, the expression of surface and edge contact interactions (which include forces and double-forces) for second-gradient continua in terms of the normal and the curvature of contact boundary surfaces and edge shapes.
Keywords
1. Introduction
We use the postulation scheme for continuum mechanics based on the principle of virtual work. In it, the work is the primitive concept. This was done, for instance, already in the previous papers [1–5]. which are all written in the spirit of the works by D’Alembert, Lagrange, Piola, and Hellinger [6–9]. For a more detailed discussion about this postulation scheme and related methodological topics, the reader is referred to dell’Isola et al. [10]. Rephrasing D’Alembert and Lagrange, the principle of virtual work states that the motion of a continuum can be calculated: “By equating to zero the sum of the internal work plus external and inertial work expended for any virtual displacement.”
In the context of a D’Alembert–Lagrange postulation scheme, which is founded on the principle of virtual work, the difference between first-gradient and second-gradient continua can be simply specified by referring to the order of internal work functional, when regarding it as a distribution and virtual displacements as the corresponding test functions. On the contrary, in the light of Cauchy’s postulation scheme, which is based on balance of forces and moments of forces, to specify such a difference becomes nearly insurmountable.
The first systematic formulation of continuum mechanics based on the principle of virtual work (or virtual velocities, as he preferred to say) is due to Gabrio Piola [8]. In fact, the generalization of the principle of minimum potential energy led him to the definition of an internal work functional, where, for a first-gradient theory, the stress appears as dual quantity to the first gradient of the virtual displacement field. Piola started from the formulation of this principle in the Lagrangian description, transformed the Lagrangian expression of internal and compatible external work functionals into the Eulerian description and finally obtained the Eulerian equilibrium conditions as well as the dependence of contact interactions on the shapes of so-called Cauchy cuts.
In contrast, Cauchy preferred to base continuum mechanics on the balances of forces and moments of forces formulated at first in the Eulerian description. Within Cauchy’s postulation scheme forces and moments of forces are the primitives concepts of the theory. Moreover, in Cauchy’s framework, one has to assume that subbodies interact exclusively by contact surface forces and that these surface forces depend only on the position in the continuum and on the normal of the Cauchy cut. The latter assumption is generally referred to as Cauchy postulate. With his assumption, Cauchy restricted the possible constitutive equations for the continua to be considered. In fact, it results that Cauchy did limit his theory to first-gradient continua.
Instead, as already envisaged by Piola and fully proved by Mindlin and Toupin (among many other scholars, see dell’Isola et al. [11]), it is possible to formulate continuum theories in which contact interactions on Cauchy cuts depend also on their curvature. This is, for instance, the case for the theory of second-gradient continua, in which Cauchy cuts not only contact surface forces but also contact edge forces and double-forces do appear. While the generalization of Cauchy’s theory is almost impossible, following D’Alembert–Lagrange continuum mechanics, it is conceptually straightforward to generalize the first-gradient theory [12] to the second-gradient theory [9]: albeit Piola could not complete his scientific program, he fully understood this.
1.1. Notation
Following the postulation accepted for Galilean Mechanics, the physical space, where the material particles of considered second-gradient continua can be placed, is modeled as a three-dimensional Euclidean vector space
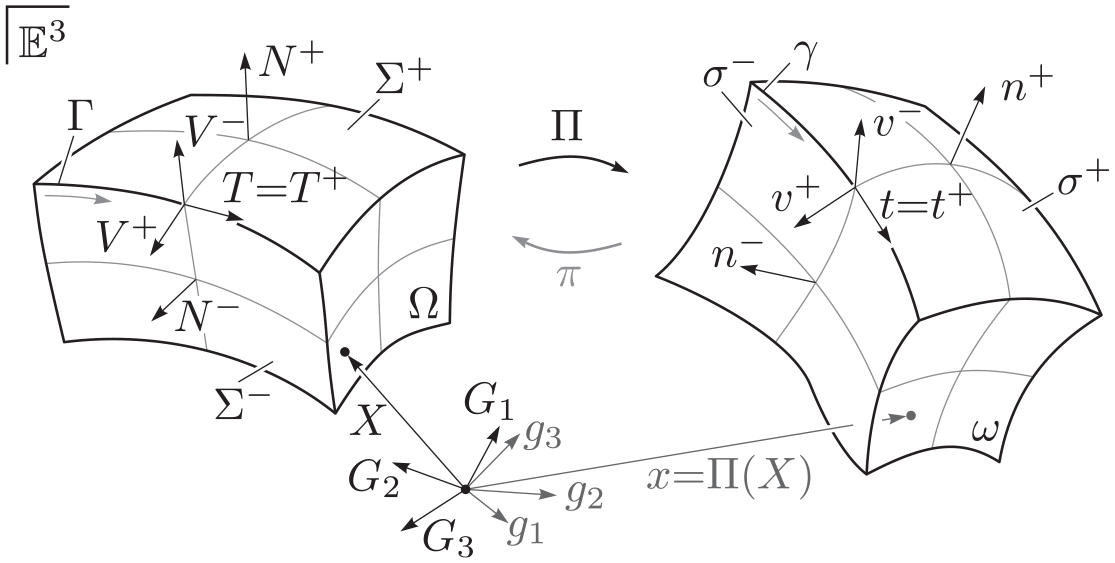
Reference and current configuration of a body with a piecewise continuous boundary surfaces and piecewise continuous boundary curves.
A placement of the body
We use the upper-case

The components of the first gradient

both of which are functions of
We introduce virtual displacements

In the Lagrangian description, all vector and tensor valued functions depend on the referential points

As the Eulerian gradients can only be defined when

We will make the same abuse of notation for every field we introduce, be it Lagrangian or Eulerian: we use the same symbol independently of the presence of a composition with
1.2. Main results of the paper
D’Alembert–Lagrange continuum mechanics is based on the Lagrangian form of the principle of virtual work which demands the equality

to hold for every virtual displacement field
For a second-gradient material, the internal work functional is defined as

where
As a consequence of the principle of virtual work, the external work functional compatible to the internal work functional must have the form (see [1, 4])

In this expression, the co-vector fields
After the Lagrangian Eulerian change of variable in the Lagrangian internal work functional (3), it is easy to verify that the Eulerian internal work functional is still a second-order distribution of the form

where
One of the main results of this paper consists in showing the Piola transformation of Lagrangian stresses into Eulerian stresses

which can be written, with an obvious meaning of the symbols, in a more synthetic way as

Note that with our notation, either the left hand sides have to be composed with
The reader will remark that by simply assuming
Similarly to what happens for its Lagrangian counterpart, the Eulerian external work functional compatible with a second-gradient Eulerian internal work functional is given by

The co-vector fields
To formulate the Piola transformation of external interactions, we introduce the inverse of the right Cauchy-Green strain

as well as the Lagrangian vector field

Introducing the Jacobians for volume, area, and length

which are translated to a direct notation reads as

The Piola transformation of the surface double-force, once in index and once in direct notation, are given by

Finally, we remark that only via a change of variable within the internal work functional, we obtained the Piola transformation of the stresses (4). Since Eulerian normal derivatives to
1.3. Outline of the paper
In the introduction at hand, we present the used notation and summarize the main results of this paper. In section 2, we postulate the virtual work principle for second-gradient continua in Lagrangian description. In fact, it is the generalization of the principle of minimum of total energy envisaged by Piola [8] and formalized by Paul Germain [3] in Eulerian description. Using an integration by parts procedure, we formulate the strong form of the equilibrium conditions, including the local equilibrium partial differential equations and corresponding natural boundary conditions. In section 3, the Eulerian virtual work principle is deduced from the Lagrangian virtual work principle. An integration by parts procedure similar to the one used in section 2 allows for the deduction of the structure of contact interactions in Eulerian description. The dependence of contact interactions on the shape of Cauchy cuts is explicitly shown so that it becomes clear that Cauchy postulate is not applicable to second-gradient continua. In both sections 2 and 3, we deduce the compatible form of external interactions between second-gradient continua and the external world. In section 4, the transformation formulas between the Lagrangian and Eulerian fields are presented, generalizing the Piola transformations valid for first-gradient continua. In the last section 5, we check the consistency among: (1) Piola transformations of stress and double-stress, (2) Piola transformations of external forces and double-forces, and (3) the obtained expressions of Lagrangian and Eulerian contact interactions.
2. The Lagrangian virtual work principle for second-gradient continua: equilibrium conditions
If one insists to use the postulation scheme put forward by Cauchy for continuum mechanics, in generalizing the theory to the case of second-gradient continua he finds some intrinsic, and nearly insurmountable, difficulties, see for instance dell’Isola and colleagues [15–17]. In fact, Cauchy’s approach 1 is based on the primitive concepts of force and moment of forces together with the formulation of corresponding balance laws, and, by means of the tetrahedron argument, on the introduction of the concept of stress. Cauchy’s approach requires some major and ad hoc modifications to include the case of second-gradient continua, see dell’Isola and Seppecher [18] and dell’Isola et al. [11]. Instead, in D’Alembert–Lagrange continuum mechanics [6,7], it is very easy to define higher gradient continua simply modifying the internal work functional (see e.g. Germain [1,3] and Epstein and Smelser [19]).
In Cauchy’s approach, stress is a derived concept, and its existence must be proven, while in the D’Alembert–Lagrange approach it is a primitive concept. Vice versa in Cauchy’s approach, the concept of force and the balance law of force are primitive while in D’Alembert–Lagrange’s approach they are derived concepts. As discussed in detail by Eugster [9] and Eugster and dell’Isola [20–22], Truesdell (see [23]) interpreted the D’Alembert–Lagrange postulation scheme from his point of view and therefore claims The derivation given by HELLINGER […] fails through petitio principi[sic!], since the stress components appear in the original variational principle. We do not understand the remark attributed to CARATHÉODORY by MÜLLER and TIMPE […]. Existence of the stress tensor can be proved from variational principles which assume the existence of an internal energy having a special functional form. (p. 595)
In this section, we show how the principle of virtual work can be postulated to generalize the principle of minimum of total energy, as already discussed by D’Alembert [7] and in particular for continuum mechanics by Piola [8].
2.1. The principle of minimum of total energy generalized into the principle of virtual work
Once the kinematics of a mathematical model is established, it is necessary to find the time sequence of configurations, that is, the motion that predicts the behavior of the modeled system. One can start by looking for the predictions concerning equilibrium configurations. The principle of minimum of total energy characterizes the stable equilibrium configurations and states that,
In every model for physical phenomena, the specification of kinematics has to be completed by the choice of a functional defined on the set of admissible configurations, called functional of total (potential) energy.
Stable equilibrium configurations are the minima of the total potential energy functional.
The total potential energy functional, for deformable bodies, includes the deformation energy and the potential energy describing the interactions between the considered body with the external world.
D’Alembert, Lagrange, Piola, Hamilton, and Rayleigh (see [6–8,24] and [10,11,16,25] for a historical overview) proposed to generalize the principle of minimum of total potential energy to enlarge the predictive scope of formulated models to include the possibility to describe non-conservative interactions and dissipation phenomena. Their line of thoughts can be reformulated with the following thread of reasoning.
Let us assume that the total potential energy functional

Remark that in the previous condition the dependence on the variable
One may decompose

D’Alembert generalized the previous condition in the more general case of non-conservative and dissipative models. He postulates the existence, for every admissible configuration
In conclusion, the basic assumption in D’Alembert–Lagrange continuum mechanics consists in postulating that the motion of every continuum can be characterized by suitably choosing the constitutive equations for the three work functionals

holds, at every time instant, for every small admissible displacement
The functional
Albeit, in such a generalization, the original meaning of such small variation of placement (i.e. test displacement used to check minimality of total (potential) energy) is lost, D’Alembert kept calling “virtual displacement” the generic displacement that may be added, at any instant, to the configuration attained by the motion to get another admissible placement.
D’Alembert virtual work identity is intended to hold, at every time instant, for every admissible virtual displacement

2.2. Work functionals as distributions
A fundamental part of the principle of virtual work as formulated in a modern language consists in postulating that the functional which associates to every virtual infinitesimal displacement the work expended in any specific interactions among and inside bodies is: (1) linear and (2) continuous.
Of course, one needs to introduce a topology in the set of admissible virtual displacements, if one wants to be able to talk about continuity of work functionals. Therefore, the distribution theory of L. Schwartz [27] seems suitable to give the conceptual frame needed to formulate continuum mechanics (see Germain [3]). The linear continuous functional that associates the virtual work corresponding to every virtual displacement is a distribution. We assume to have bounded reference configurations so that
A very general kinematical assumption that we accept is that the set of admissible virtual displacements include (let us underline: we are not stating that it coincides with) the set
Note that, the smaller is the space of test functions the larger is its dual space.
4
Therefore, considering the dual of
2.3. Second-gradient deformation energy functional
An internal work functional is said to be conservative if it is the derivative of an energy functional, which we call deformation energy functional. We assume that, in general, internal work functionals are the sum of a conservative plus a non-conservative part. For instance, following Hamilton–Rayleigh’s postulation scheme (see e.g. [10,29]), the non-conservative part of the internal work functional can be calculated from a so-called Rayleigh dissipation functional. An interesting physical system in which a phase transition occurs (similar to what has been described by Javanbakht et al. [30]) in large deformations is given by Spagnuolo and Cazzani [31]: Pantographic metamaterials may behave as a second-gradient continua until a certain threshold is reached, beyond which, because of friction phenomena, they behave as standard first-gradient continuum.
Elastic second-gradient continua are continua whose deformation energies depend on

such that the total deformation energy

When calculating the first variation of the deformation energy, a special role is played by the elastic Piola–Lagrange stress and double-stress tensors defined as

The first variation of the second-gradient deformation energy functional has the following form

D’Alembert and, then, Lagrange and Piola, generalized this approach to non-conservative internal interactions. Albeit, in this last case, the internal interactions are not fully determined by a volume density of deformation energy, they assume that it is still possible to introduce a linear (and continuous) functional

where we have introduced the Piola–Lagrange stress and double-stress tensors

2.4. External work functionals in second-gradient continua
The external work functional specifies the interactions between the considered continuum and its external world. Once we have defined the internal, inertial, and external work functionals, postulating the D’Alembert identity for every virtual displacement
A classical illustration of this fact, already presented by Piola [8,24], is given by perfect fluids. One assumes that perfect fluid’s internal energy depends only on their current mass density
The internal virtual work equation (10) is, in fact, a representation of a second-order distribution. Using the generalized Schwartz representation theorem for second-order distributions (see Schwartz [27]) as proven in Appendix A by successive application of the divergence theorem, the internal work functional can also be represented 7 as

where

Therefore, the representation (11), together with the virtual work principle (2), implies that the external work functionals must have the form

As already discussed in the introduction, in this expression, the co-vector fields
2.5. Boundary value problem in second-gradient continua
When the class of external work functionals compatible with the internal work functionals is specified, the essential and natural boundary conditions, supplying well-posed boundary value problems, can be easily determined. We underline that the variational methods introduced in modern mechanics by D’Alembert allow for the simultaneous and logically coherent determination of the strong form of the PDEs that govern the evolution of the considered systems together with the corresponding boundary conditions. Other postulation schemes must, instead, face a difficult problem related to the independent postulations of bulk PDEs and boundary conditions: one has to verify then that the chosen postulates lead to well-posed problems.
The PDEs implied by the D’Alembert identity (2), when using

In order to get well-posed problems, to these PDEs suitable boundary conditions must be added. The structure of both equations (11) and (12) obviously indicate that in second-gradient continua, one can assign as essential (kinematical) boundary conditions not only the placements on a subset



We recall that (see equation (56) in Appendix 1) the symbols
2.6. Contact interactions in second-gradient continua: dependence on the shape of Cauchy cuts
The concept of contact interactions inside deformable bodies was developed in the third decade of the 19th century by Piola and Cauchy (a detailed discussion about the priority between them deserves further investigations: see e.g. [24,33]). While Piola, following Lagrange, considered contact interactions as derived concepts, Cauchy based his analysis on the laws of balance of forces and moments of forces and therefore treated contact forces as primitive concepts.
2.6.1. Cauchy cuts inside deformable bodies
Cauchy cuts are (suitably regular) surfaces in the Lagrangian or Eulerian configurations that are introduced to divide a continuum into disjoint subbodies. Cauchy, in his foundation of continuum mechanics, assumed that the interaction between two subbodies of a given deformable body, having in common a surface, is localized on such cuts. As shown in Truesdell [34] using a modern formalism, the contact interactions concentrated on Cauchy cuts represent the primitive concept by means of which, assuming as fundamental hypotheses the balance of force and balance of momentum of forces, the existence of the stress tensor can be proven. The key point of this proof is given by the celebrated Cauchy tetrahedron argument. However, Cauchy’s argument is based on some assumptions which complicate the generalization to the case of second-gradient continua: for instance the absence of edge contact forces (for a more detailed discussion of this point see [15,18]).
Following an analysis that can already be found in the works by Piola and choosing the principle of virtual work as the most fundamental postulate of continuum mechanics, we show, in this section, that the concept of contact interaction can be formulated also for second-gradient continua, but as a derived concept. The question is rather delicate: in fact, it is true that even for
In this aspect, D’Alembert–Lagrange’s approach to continuum mechanics does not differ from Cauchy’s. However, as we will show in the following of this subsection, one of the most important among the assumptions accepted by Cauchy, the so-called Cauchy postulate, 10 has not a general validity.
The so-called Cauchy postulate has to be regarded as a property specific to first-gradient continua being valid for a particular class of deformation energy constitutive equations. As a consequence the choice of the word “postulate” seems rather inappropriate.
Indeed, within the variational postulation scheme, where the stresses are defined as duals in work to the gradients of the virtual displacement, the contact interactions between a subbody and its complement, divided by the Cauchy cut, are a derived concept.
2.6.2. Validity of the principle of virtual work for subbodies and contact interactions in second-gradient continua: reasoning à la Piola
In the following, we define contact interactions also in second-gradient continua, and we show how they do depend on the shape of the Cauchy cut. We will see that the contact interactions for second-gradient continua can be expressed in terms of
The value of the Piola–Lagrange stress and double-stress tensors in the considered point of a Cauchy cut.
The local shape of a Cauchy cut.
Let us consider an inner subbody

where

Inserting the representation of internal work given by generalized Schwartz theorem (11) in its unique form involving transverse derivatives to the boundary
Using

By defining the work functional of contact interaction for

with

we are let to define the external work functional for

By defining

we get that the D’Alembert identity (17) for

The presented derivation proves that we can obtain the formulation of the principle of virtual work for any inner subbody
We recall here that the presented definitions and reasonings parallel closely those used by Piola (see dell’Isola et al. [24]) for introducing contact interactions in the context of first-gradient theory.
Unfortunately, this circumstance was not remarked somewhere in the literature: In Fried and Gurtin [35], the principle of virtual work is postulated for every subbody introducing a so-called non-standard form of the principle of virtual power. However, this non-standard form was already presented by Germain [1,3].
2.6.3. How contact interactions in second-gradient continua depend on the shape of the Cauchy cut
Considering equation (18), evidently one sees that
Contact double-forces
Edge contact forces
Very important, for understanding the true nature of the so-called Cauchy postulate, is the dependence of the surface contact forces

Hence, for second-gradient continua, the Lagrangian expression for surface contact forces depends polynomially on the normal and on the curvature of Cauchy cuts.
11
This polynomial includes a linear and a cubic term in the components of the normal vector, a linear term in the curvature and a mixed third-order polynomial quadratic in the normals and linear on the surface mean curvature. Only, when
3. The Eulerian virtual work principle for second-gradient continua: equilibrium conditions
Whether the problem is formulated in Lagrangian or Eulerian description, we still model the same physical phenomena. For this reason, the value of the virtual work for corresponding virtual displacements must be the same in Lagrangian and Eulerian descriptions:

Consequently, the virtual work equality holds also in the Eulerian description for every admissible Eulerian virtual displacement:

Since, after the simple change of variables given by

where
The “Axiom of Power of Internal Forces”
12
in Eulerian form (as postulated in Germain [3]), which must hold for any suitably regular subbody

whereas the rigid virtual displacements in Eulerian form are parameterized by

Since the second gradient of the rigid virtual displacement vanishes, we get the symmetry of the Cauchy–Euler stress

To characterize the compatible external work functional, the same integration by parts procedure as in the Lagrangian formulation can be applied. Defining

and using the results presented in Appendix A, it is proven that the Eulerian internal work functional has the following representation:

Consequently, the compatible external work functionals must be of the form

where the co-vector fields
Inserting equations (23) and (24) in equation (21), we obtain the equilibrium equations

and by considering the dual in work of virtual displacement left free by imposed essential boundary conditions, we get


We recall that (see equation (56) in Appendix A) the symbols
By considering the dual in work of the normal derivative of virtual displacement left free by imposed essential boundary conditions, we get

Using the same procedure as in the Lagrangian framework, the virtual work of the contact interaction between a subbody

where the contact surface forces

Here,

The expression for contact forces, which we just obtained, must be compared with the expression obtained following the Cauchy tetrahedron procedure. First of all, we note that when
Finally, we remark that, in second-gradient continua, contact interactions must include double-forces. As shown in Germain [3], the tangent part of contact double-forces can be interpreted as contact couples (see also Toupin [4]), whereas the normal part of contact double-forces are a kind of interaction completely independent of forces (i.e. interactions expending work on displacements) and couples (i.e. interactions expending work on rotations). Therefore, it appears evident that postulating the balance of forces and moment of forces is not enough, in second-gradient continua, to get all necessary conditions which follow from the principle of virtual work. This circumstance shows the intrinsic weakness of Cauchy’s postulation scheme in producing the theory of generalized continua.
4. Piola transformations in second-gradient continua
In the previous section, we have introduced as Eulerian dual-quantities the Cauchy–Euler stresses together with the Eulerian external forces and double-forces. The Piola transformation problem consists in finding the relationships between the Lagrangian and Eulerian stresses and double-stresses as well as external forces and double-forces implied by the identities (20).
Let

As this relation can also be written as

we will drop the arguments in what follows. Using this convention together with equation (1), we obtain, by taking once more the gradient of equation (31), the expression

Consequently, the gradients of the Lagrangian and Eulerian virtual displacement fields are related by

When the gradient of the Eulerian field

In the following subsections, we will use these relations together with the formulas of the change of variables of volume, surface, and line integrals of Appendix B.4. We obtain the Piola transformations for stresses, double-stresses as well as external forces and external double-forces.
4.1. Piola transformation of stress and double-stress
For a scalar valued function

where

where all functions in the integral are to be composed with

Because of equation (20),

By using equations (20), (36), and (37), we get the relations between the Piola–Lagrange and the Cauchy–Euler stresses and double-stresses

which are called the Piola transformation of stress and double-stress.
4.2. Piola transformations of external forces and double-forces
The Eulerian external work functional (24) is the sum of four different terms

The Lagrangian work functional (12) admits a similar decomposition in four terms

The difficulty arises because the change of variable from Eulerian to Lagrangian descriptions does not induce a one-to-one correspondence between the listed terms. In particular, the work of external double-forces in Eulerian description does not produce only a term which can be recognized as work of Lagrangian double-forces. In fact, Eulerian work of double-forces, once transformed into Lagrangian description can be uniquely decomposed into the sum of work functional of double-forces plus work of surface forces plus work of edge forces. This is due to the fact that Eulerian normal derivatives, once transformed into Lagrangian description, are derivatives along a direction not orthogonal to the referential boundary
4.2.1. Transformations of external forces
The external work functionals due to Eulerian force densities can readily be transformed into Lagrangian description when applying the corresponding change of variables according to equation (64) with the volume Jacobian
The transformations are: for the volume forces

for the surface forces

and finally for the edge forces

4.2.2. Transformation of external surface double-forces
The external work functional of Eulerian surface double-forces is

Identifying the inverse of the right Cauchy–Green strain

Clearly, this expression involves derivatives of
We decompose it into Lagrangian normal and tangential derivatives as follows: using the Kronecker-delta

together with the equality

the normal part of equation (42) is given by

The residual tangential part is written as

with

For a fixed index

and

where we have introduced the Lagrangian vector field

Consequently, the external work functional of Eulerian double-forces can be written as

Remark that the two last terms will intervene in the Lagrangian expression for external surface and edge work functionals.
4.3. Identification of Piola transformations
Both Lagrangian and Eulerian external work functionals (12) and (24) are unique representations in terms of transverse derivatives. Hence, when transforming the Eulerian work functional into Lagrangian description, the unique relationships between the Lagrangian and Eulerian external forces and double-forces can be identified.
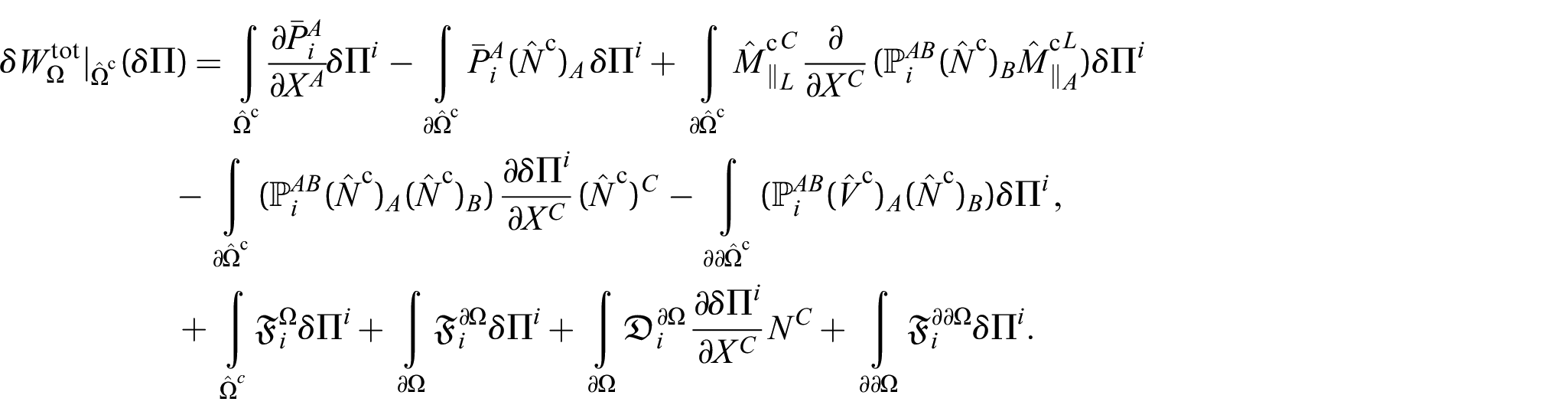
Owing to the previously discussed transformations (39)–(41) and to expression (43) for the external double-force work functional, the external virtual work functional can be written as
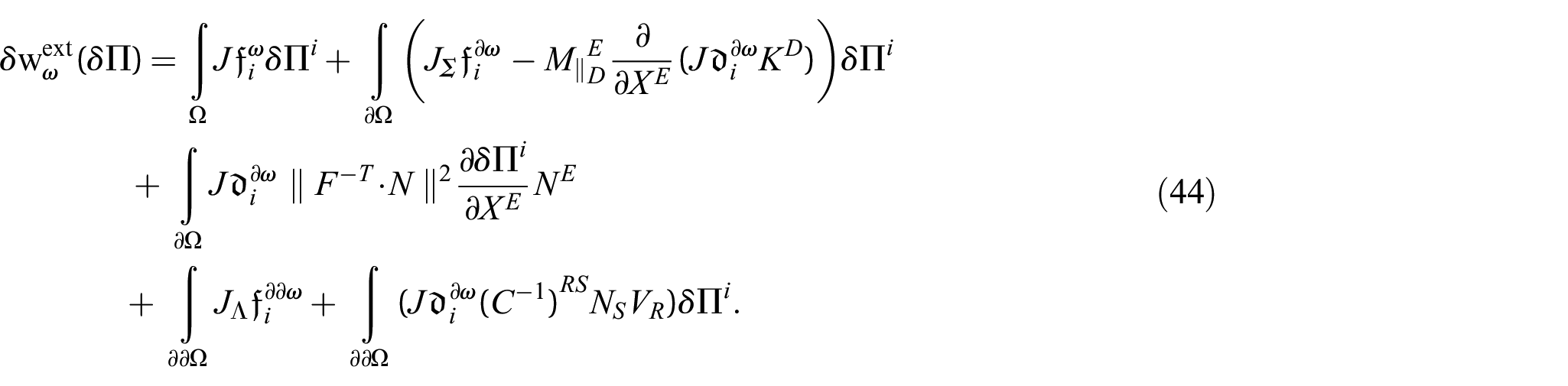
Note, the last integral expression must be understood in the sense of the convention specified in equation (56) of Appendix A. In agreement with the identity (20), comparison of equation (44) with equation (12) induces the following transformation formulas of the force densities



as well as the Piola transformation of the surface double-force

5. Consistency of Piola transformations
In section 2, we have derived the equilibrium equations and boundary conditions in Lagrangian description. In section 3, we have repeated the same procedure to obtain the corresponding Eulerian boundary value problem. Section 4 was then dedicated to find the Piola transformations relating Piola–Lagrange stress and double-stress with Cauchy–Euler stress and double-stress. Moreover, the transformation formulas for the external force and double-force contributions have been derived. Essentially, we have obtained all the desired results. However, as the transformation formulas (46)–(48) are novel and not very intuitive, a consistency check would be desirable. This is exactly what this section is for. Indeed, Piola transformation for external forces and double-forces can also been deduced from the Piola transformations (38) of stress and double-stress, by making use of the equilibrium conditions both in Eulerian and Lagrangian frameworks.
5.1. Transformation of local equilibrium equations
From the Eulerian principle of virtual work, we obtain the equilibrium equations (25), which are

Inserting the relations from equation (38) into equation (49) leads to

For a fixed index

Using Leibniz’ rule in the last term, two terms cancel and we end up with

Applying once more the Piola identity (65) on the second term, the equality reduces to

Using the Lagrangian equilibrium equations (13) in the last expression, we immediately obtain the relation

and we recover the Piola transformation (45) relating Eulerian and Lagrangian external volume force densities.
5.2. Transformation of boundary conditions
The boundary conditions (14)–(16) in Lagrangian or the boundary conditions (26)–(28) in Eulerian form relate the external interactions with the stresses and double-stresses. In the following, we show that inserting the Piola transformation of the stress and double-stress into the boundary conditions, confirms the transformation rules for the external force and double-force densities. The transformations are carried out in the same order as in section 4. Hence, we start with the double-force density followed by the edge forces and close the subsection with the most tedious transformation of the surface force densities.
5.2.1. External surface double-forces
The external double-force densities must satisfy the boundary condition (28), which, after inserting equation (38), can be expressed as

Using (62) to get

where the Lagrangian boundary condition (16) has been used. Clearly, this identity is equivalent to the Piola transformation (48) of external double-forces.
5.2.2. External edge forces
When dealing with edge force densities, we use the transformations (62) and (63) for the normal to the faces and for the tangent-normal to the edge (Appendix B.2). We obtain
Replacing the Cauchy-Euler double-stress with equation (38) in the first term of the right hand side and using equation (62) in the second term, we obtain the following equation:

Using the boundary condition (28), we get

Using the last expression in the Eulerian boundary condition (27) together with the Lagrangian boundary condition (15), we obtain

which corresponds to the Piola transformation of edge forces (47).
5.2.3. External surface forces
For the transformation of the surface force density, we consider the two terms in the boundary conditions (26) separately. Using equations (38) and (62), we get

Using the Piola identity (65) in the third term, we obtain

Applying Leibniz’ rule in the last term, the expression simplifies further to

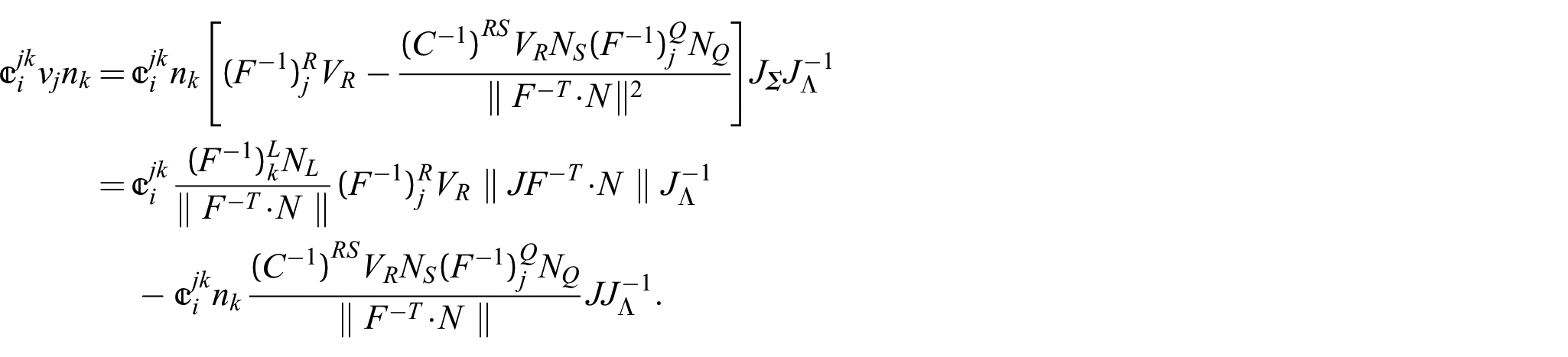
For treating the second term that appears in the Eulerian boundary condition (26), we must use the surface Piola-type identity in the form equation (69) (Appendix C). We get the relation

Inserting

Since

we can modify the expression further to

and use it to finally write

The last equality confirms the Piola transformation (46) for external surface forces. Hence, we succeeded in showing with an alternative way the Piola transformation formulas for the external forces and double-forces.
In first-gradient theory, where

and then representing contact surface forces in terms of stress, by using equations (18) and (29) into the above expression to get

This results in the Piola transformation
In fact, Piola transformations can be deduced only by considering the change of variables introduced by the placement
6. Conclusion
In this paper, it has been chosen to base continuum mechanics on the principle of virtual work. Note that this principle, established by D’Alembert and Lagrange, has been first called “principle of virtual velocities” and was applied to fluid mechanics. This is true also for its application to second-gradient continua. Indeed the so-called “capillary fluids” were the first continua of this type to be described ([32,37,38], more historical remarks can be found in previous studies [39–42]). We have argued that D’Alembert–Lagrange postulation scheme is more suitable than Cauchy’s postulation scheme for introducing generalized continuum models (see among others [43–49]). In fact, while it is impossible to generalize Cauchy’s tetrahedron argument based on the postulation of balance of forces and moments of forces to formulate generalized higher gradient continuum models, instead by using different forms of internal work functionals such a generalization becomes very natural. Specifically, we have discussed how the definition of the internal work functional as a second-order distribution restricts the compatible external work functionals and how it determines the contact interactions which can be exerted in second-gradient continua. Moreover, we deduced the equilibrium conditions from the principle of virtual work in Lagrangian description first and then in Eulerian description. The novel contribution of this paper is the Piola transformations of all mechanically relevant tensor quantities from Lagrangian to Eulerian description in the case of second-gradient continua.
With the transformations given by equations (46)–(48), we found that, in addition to the geometry of the boundary
Lagrangian surface forces are expressed in terms of the Eulerian surface forces and of Eulerian double-forces.
Lagrangian edge forces are expressed in terms of the Eulerian edge forces and of the jump of the Eulerian double-forces.
Lagrangian double-forces are simply expressed in terms of the Eulerian double-forces.
Sometimes, it has been questioned the importance of second-gradient continuum theories based on a presumed absence of physical systems which are described by such theories. The homogenization methods in previous studies [50,51], or methods based on statistical mechanics [52–55], prove that there exist specific micro-structures that, at macro level, produce a second-gradient behavior [56–63]. The pertinent micro-structures are constituted by lattices of beams [64–71] connected via elastic or perfect pivots [72]. Experimentally, the deformation of such micro-structures can be captured by X-ray micro-tomography in combination with digital image correlation procedures [73,74].
It has to be remarked that already Piola considered
Piola transformation for second-gradient continua can have a great impact in applications. In fact, a large class of novel metamaterials (those showing a pantographic micro-structure) [72,80–85] produces greater exotic effects in large deformation regimes (e.g. low sensitivity to micro-structure defects [86–88]) and this is exactly the context where the Piola transformations play the most important role. Moreover, in the study of problems in which natural boundary conditions are assigned, deadloads are usually formulated in the Eulerian description. In that case, numerical methods [86,89–94] are generally used to get predictions and Piola transformations are mandatory for formulating effective numerical integration schemes [95–98] in Lagrangian description.
Concerning the modeling of damage and plasticity pheneomena [99–102], we remark that second-gradient continua supply an important tool for getting mathematically well-posed problems. The problem of force concentration on crack tips has attracted particular interest: In this context, describing edge force effects is of utmost relevance. Because of the different nature of Lagrangian and Eulerian edge forces, the presented results may clarify some apparent paradoxes.
In perspective, it is interesting to consider the case of second-gradient continua in which new edges can appear in the Eulerian configuration. We mean here, Eulerian edges which are not the image, under the placement mapping, of Lagrangian edges. Moreover, it is challenging to generalize the presented results to the case of
Footnotes
A. Equivalent form for second-order distributions
Let us consider a regular manifold
Given a vector field
where
the divergence theorem, see Capobianco and Eugster [108], reads
In accordance with the theory of distributions [27], both the virtual work expressions in Lagrangian and Eulerian descriptions can be considered as distributions
where the derivatives of the test functions
Using the product rule in the second integrand of equation (52), we can write
With the abbreviation
Using the divergence theorem for the first and the third term and introducing the distributions
Equation (52) can be written in the form
The last term here, is the only expression in which derivatives of
where we have introduced the distribution
The distribution
Applying once more Leibniz’ rule, we can manipulate the first term in the last line of equation (53) in the following way
In the last step, we have introduced the distributions
To obtain
In conclusion, from the point of view of the theory of distributions, the second-order distribution
This equivalence can be applied to the Lagrangian or Eulerian internal work functionals.
As a last thing, we work out the explicit dependence of
which is obviously equivalent to
We can further manipulate the expression to
We assume that the faces are regular enough for extending any field in their vicinity as constant along the normal. Using
the above expression simplifies to
Inserting equation (57) in equation (55), the distribution
B. Piola transformations of tangents,surface normals,and edge normals
C. Piola-type identities
The Piola-type identities are essential in getting a direct transformation between the equilibrium equations in Lagrangian and Eulerian form. In fact, they allow for the expression of the Lagrangian divergence operator in terms of the Eulerian divergence operators. As the divergence operator can also be defined on an arbitrary submanifold, Piola identities for such submanifolds can be formulated. For our purposes, we need such an identity for two- and three-dimensional domains.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.