A non-linear model describing the equilibrium of a cracked plate with a volume rigid inclusion is studied. We consider a variational statement for the Kirchhoff–Love plate satisfying the Signorini-type non-penetration condition on the crack faces. For a family of problems, we study the dependence of their solutions on the location of the inclusion. We formulate an optimal control problem with a cost functional defined by an arbitrary continuous functional on a suitable Sobolev space. For this problem, the location parameter of the inclusion serves as a control parameter. We prove continuous dependence of the solutions with respect to the location parameter and the existence of a solution of the optimal control problem.
The creation and use of high-performance engineered composites with unique properties is one of the foundations of technological progress. The development and implementation of composites involve a preliminary stage of simulation experiments based on suitable mathematical models. In this stage, optimal geometrical and mechanical properties of composites can be predicted and optimized. The accuracy of precalculations depends on the quality of selected mathematical models. In this regard, justification and examination of the most accurate mathematical models describing the stress–strain state of composites is a promising direction of scientific research. It is well known that under both exploitation loads as well as specific operating conditions, inhomogeneous properties of composite structures can lead to the nucleation of cracks. For cracked solids, it should be noted that the adequacy of a mathematical model to represent the actual physical process depends to a considerable extent on the choice of the boundary conditions on cracks.
From a mathematical point of view, the presence of cracks implies the formulation of a problem in a domain with non-regular boundary components. This circumstance represents one of the principal difficulties of crack problems [1–5]. For composite solids, the analysis of the influence of geometric and mechanical properties of inclusions on the sensitivity of the stress at a crack-tip is a challenging mathematical problem [6–10]. Moreover, it should be noted that imposing boundary conditions of an equality type on a crack may lead to physical inconsistency because a mutual penetration of the crack faces may happen [1, 11].
An alternative approach to the formulation of crack problems that excludes mutual penetration of the crack faces has been investigated since the 1990s. This approach is characterized by the Signorini-type boundary conditions at the crack faces [1, 2, 12–21]. In the last 10 years, within the framework of crack models subject to non-penetration (contact) conditions, a number of papers have been published concerning shape optimization problems for delaminated rigid inclusions; see, for example, [2, 22–27]. For a heterogeneous two-dimensional body with a micro-object (defect) and a macro-object (crack), the anti-plane strain energy release rate is expressed by means of the stress intensity factor that is examined with respect to small defects such as microcracks, holes, and inclusions [7]. The ability of velocity methods to describe changes of topology by creating defects such as holes was investigated in [28]. Employing the shape-topological sensitivity analysis [29], the existence of a solution of an optimal control problem related to the best choice of the location and shape of elastic inclusions was shown in [6]. In [30, 31] explicit formulae of derivatives of the energy functionals with respect to the rigid inclusion shapes were established.
In the present paper, we deal with a non-linear model describing the equilibrium of an elastic plate containing a volume rigid inclusion. We consider a family of variational problems that depends on the location parameter of the rigid inclusion. Here we suppose that the inclusion can shift its location along the graph of a given continuous function. It is important that the function of a graph may not satisfy the Lipschitz condition. Along with this family of problems, we formulate an optimal control problem with the cost functional defined by an arbitrary continuous functional on a suitable Sobolev space. We prove the continuous dependence of the solutions with respect to the location parameter of the rigid inclusion which plays the role of a control parameter. In contrast to the previous results related to the optimal size of rigid inclusions [24, 26, 32], to justify a passage to the limit in variational inequalities, we construct a suitable strongly converging sequence of test functions. The result concerning the optimal location of a rigid inclusion for a two-dimensional non-linear model describing the equilibrium of a cracked composite solid was obtained in [19].
2. Family of equilibrium problems
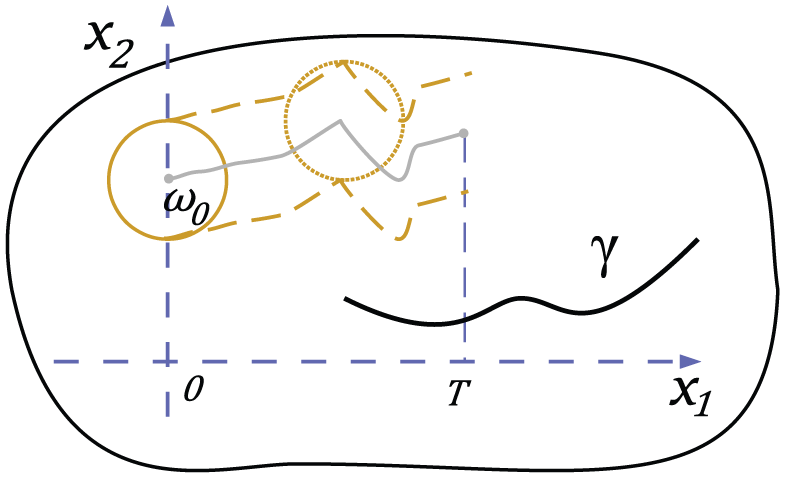
We start with a description of admissible geometries (see Figure 1). Let be a bounded domain with the smooth boundary . Suppose that a Lipschitz curve without self-intersections has the following properties. We assume that can be extended in such a way that this extension crosses at two points, and is divided into two subdomains and with Lipschitz boundaries , , , . Let us denote . Let be a domain of class such that , . We consider the following family of domains , defined by the relation
We suppose the following assumptions.
Geometry of the problem.
Assumption 1.The union of all domains defined in accordance with the following relation
satisfies.
Remark 1.Let us observe that due to Assumption 1, there exist some domains , with the smooth boundaries , of class such that , , .
This assumption gives us an opportunity to use the well-known results concerning the spaces defined on some domain with a boundary of class , namely, the trace theorem [33] and the following characterization
where is a unit normal to .
Next, we should write the following assumption for an arbitrary domain corresponding to the fixed parameter .
Assumption 2.For an arbitrary strictly inner subdomain there exists a positive sufficiently small number such that for all .
In order to formulate the mathematical model, we consider a three-dimensional Cartesian space such that the set corresponds to the middle plane of a plate. We assume that the thickness of the plate is constant and is equal to two. The curve defines a crack (a cut) in the plate. This means that the cylindrical surface of the through crack specified by the relations , where is the distance to the middle plane. Next, we fix the parameter and suppose that the domain refers to a rigid inclusion whereas the domain corresponds to an elastic part of the plate.
Denote by the displacement vector of the mid-surface points (), by the displacements in the plane , and by the displacements along the axis . The strain and integrated stress tensors are denoted by , , respectively [1]:
where is the given elasticity tensor, assumed as usual to be symmetric and positive definite:
A summation convention over repeated indices is used throughout the paper. Next we denote the bending moments by formulae [1]
where the tensor has the same properties as the tensor . Let be a bilinear form defined by the equality
where , , and is some subdomain of . The potential energy functional of the plate has the following representation [1]:
where vector describes the body forces [1]. We introduce the Sobolev spaces
where is the unit external normal vector to . We should note here that by the assumption concerning the domain , Friedrich’s and Korn’s inequalities are valid in the non-smooth domain (see [1, 34]). They provide the following inequality
Remark 2.The inequality (2) yields the equivalence of the standard norm in and the semi-norm determined by the left-hand side of (2).
For the precise formulation, we have in mind that the notion of a rigid inclusion allows only displacement in the space of infinitesimal rigid displacements on , where
where , see [35]. The condition of mutual non-penetration of the crack faces is given by
where is a unit outward normal to , is the jump of a , and the traces on , correspond to the positive and negative directions of , respectively, refer to [1, 35]. An equilibrium problem for a plate with a crack and a rigid inclusion can be formulated as the following minimization problem:
where the set of admissible functions is in the form
According to [3, 35], the problem (4) is known to have a unique solution , which satisfies the variational inequality
3. Optimal control problem
Let be an arbitrary continuous functional, and consider the cost functional
defined on an interval .
As an example of such functionals having physical sense, we can give the functional , which characterizes the deviation of the displacement vector from a given function . We mention that under the appropriate additional conditions on , , and , there exists the first derivative
of the energy functional with respect to the domain perturbation parameter at . Here denotes solutions of equilibrium problems for perturbed domains . We refer the reader to [36] for the exact expression of the formula of the first derivative and corresponding explanations. It follows from [36] that the functional that expresses the mentioned first derivative is continuous in the space . Consider the optimal control problem:
This means that we want to find the best location of the inclusion along the graph of the function that provides the maximal value for the cost functional. Our main existence result is as follows.
Theorem 1.There exists a solution of the optimal control problem (6).
Proof. Let be a maximizing sequence. By the boundedness of the interval , there exists a convergent subsequence such that
It is easy to see that if there exists a subsequence with the following properties , , we establish that is a solution of (6). Therefore, we assume that for sufficiently large .
In view of Lemma 2, the solutions of (4) corresponding to the parameters converge to the solution strongly in as . This allows us to obtain the convergence
which yields
The theorem is proved. □
4. Auxiliary lemmas
Now we have to establish auxiliary results that were used to prove Theorem 1. For convenience, we formulate these results as the following two consistent lemmas.
Lemma 1.Let be a fixed real number and let be a sequence of real numbers converging to as . Then for an arbitrary function there exist a subsequence and a sequence of functions such that , and strongly in as .
Proof. Fix . First note that if there exists a subsequence such that , then the assertion of the lemma holds for , . Without loss of generality, we can assume that is a strictly monotonic decreasing sequence such that
Denote by with , the function describing the structure of in . We extend the function to the whole domain by the equalities:
From Assumptions 1 and 2, there exists such that for all the domain is a simply connected domain with the Lipschitz boundary. It is now necessary to fix an arbitrary value and consider the following family of auxiliary problems
where ,
where is a unit normal to . It is obvious that the functional is coercive and weakly lower semicontinuous on the space . In addition, one can verify that the set is convex and closed in . This properties provide the existence of a unique solution of the problem (7), see [1]. This solution is characterized equivalently by a variational inequality
Note that applying a lifting operator for the smooth domains and (see Remark 1), we can construct a function such that in and , on . As for all , we can substitute in (9) as the test function, which yields the inequality
From this relation and Korn’s inequality, we obtain the following uniform upper bound:
Therefore, we can extract from the sequence a subsequence , which is defined by equalities , (henceforth, we define a sequence by the equality ) and weakly converges to some function in . It is now necessary to show that . By construction, and the smoothness of the domains , the inclusion holds. Consequently, bearing in mind the weak closedness of we have . We consider now the functions of the form , where is the function defined by zero extension of an arbitrary function into . It is observed that for sufficiently large the functions belong to . We may therefore substitute and into (9), and then combining the resulting inequalities, we find
The function is now fixed and by passing to the limit in (10) it is established that
Next, since by Assumption 1 the domain belongs to the class , we have the density of both in and . Therefore, (11) yields that in . Finally, by construction, the equality is satisfied in the domains and . Consequently, in . As a result, there is a sequence such that , and weakly in as . Now we are in a position to prove the strong convergence. By virtue of the Mazur theorem there exist a function and a sequence of sets of real numbers satisfying and such that the sequence defined by the convex combination
converges to strongly in . We can now determine the required sequence by the equations
The constructed functions , belong to the set corresponding to the subsequence of the sequence .
In the other case, namely when the sequence is a strictly monotonic increasing sequence, we should consider the sets which are defined with the help of domains , for fixed . Lemma 1 is proved.□
Now, we are in a position to prove an auxiliary statement that was used in the proof of Theorem 1.
Lemma 2.Let be a fixed real number. Then strongly in as , where , are the solutions of (4) corresponding to parameters , , respectively.
Proof. We will prove it by contradiction. Let us assume that there exist a number and a sequence such that , , where , are the solutions of (4), corresponding to . Because of for all , we can insert in (5) for fixed . This provides
From here, the following estimate follows being uniform in
Consequently, there exists a subsequence of , still indexed by , such that converges to some function weakly in .
Now we show that . Indeed, we have . In accordance with the Sobolev embedding theorem [33], we deduce that
Choosing a subsequence, if necessary, we assume as that almost everywhere on .
To proceed further with our proof, we fix an arbitrary strictly inner subdomain . There exists a sufficiently large such that if , then , see Assumption 2. Therefore, the sequence converges to almost everywhere on as tends to infinity. This allows us to conclude that each of the numerical sequences , , , , , defining the structure of , in is bounded in . Thus, we can extract subsequences (retain notation) such that
Therefore, for the fixed domain , we have
Consequently, we obtain that
Owing to arbitrariness of the domain we get that
Whence the inclusion holds.
We now turn to the inequality condition in the definition of the set . We have to show that satisfies the inequality on . Bearing in mind the convergence (13), if necessary, we can once again extract a subsequences satisfying , almost everywhere on both and . This fact allows us to pass to the limit in the following inequality
This leads to on . Therefore, we get the inclusion .
For the sequel, we have to prove the equality and to establish the existence of a sequence , of solutions strongly converging in to . Now, let us prove that . For this purpose, we analyze the variational inequality (5) and its limiting case. From Lemma 1, for any there exist a subsequence and a sequence of functions such that and strongly in as .
The properties established above for the convergent sequences and allow us to pass to the limit as in following inequalities derived from (5) for and with the test functions
As a result, we have
As was arbitrary, we see that the last inequality is variational. The unique solvability of this variational inequality yields that .
To complete the proof we should establish the strong convergence . By substituting and into the variational inequalities (5) for , we get
The equalities (16) together with the weak convergence in as imply
As we have the equivalence of norms (see Remark 2), one can see that strongly in as .
Thus, we have a contradiction to the initial assumption. Lemma 2 is thus proved. □
5. Conclusion
In this paper, we have analyzed a family of variational problems describing the equilibrium of cracked plates with inclusions having different location parameters . The existence of the solution to the optimal control problem (6) has been proved. For that problem, the cost functional is defined by an arbitrary continuous functional, whereas the location parameter of the rigid inclusion serves as a control. Lemmas 1 and 2 show a connection between the equilibrium problems for bodies with rigid inclusions of varying locations. Note that this approach can be applied for equilibrium problems related to the two-dimensional solids with classical linear conditions as well as for cases of reinforced solids without cracks.
Footnotes
Conflict of interest
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work has been supported by the Ministry of Education and Science of the Russian Federation within the framework of the base part of the state task (project 1.6069.2017/8.9).
ORCID iD
Nyurgun Lazarev
References
1.
KhludnevAMKovtunenkoVA. Analysis of Cracks in Solids. Southampton: WIT Press, 2000.
2.
ShcherbakovVV. Shape optimization of rigid inclusions for elastic plates with cracks. Z Angew Math Phys2016; 67(3): 71
3.
KhludnevAM. Elasticity Problems in Non-smooth Domains. Moscow: Fizmatlit, 2010 (in Russian).
4.
ItouHKhludnevAM. On delaminated thin Timoshenko inclusions inside elastic bodies. Math Meth Appl Sci2016; 39(17): 4980–4993.
5.
KhludnevALeugeringG. On elastic bodies with thin rigid inclusions and cracks. Math Meth Appl Sci2010; 33(16): 1955–1967.
6.
LeugeringGSokołowskiJZochowskiA. Control of crack propagation by shape-topological optimization. Discrete Contin Dyn Syst Ser A2015; 35(6): 2625–2657.
7.
KovtunenkoVALeugeringG. A shape-topological control problem for nonlinear crack–defect interaction: The antiplane variational model. SIAM J Control Optim2016; 54(3): 1329–1351.
8.
KhludnevAM. Optimal control of crack growth in elastic body with inclusions. Eur J Mech A Solids2010; 29(3): 392–399.
9.
KhludnevASokołowskiJSzulcK. Shape and topological sensitivity analysis in domains with cracks. Appl Math2010; 55(6): 433–469.
10.
XavierMNovotnyAASokołowskiJ. Crack growth control based on the topological derivative of the Rice’s integral. J Elast2019; 134(2): 175–191.
11.
MorozovNF. Mathematical Problems of the Theory of Cracks. Moscow: Nauka, 1984 (in Russian).
12.
FaellaLKhludnevA. Junction problem for elastic and rigid inclusions in elastic bodies. Math Meth Appl Sci2016; 39(12): 3381–3390.
13.
KhludnevAMFaellaLPopovaTS. Junction problem for rigid and Timoshenko elastic inclusions in elastic bodies. Math Mech Solids2017; 22(4): 1–14.
14.
KhludnevAMPopovaTS. Junction problem for Euler–Bernoulli and Timoshenko elastic inclusions in elastic bodies. Q Appl Math2016; 74(4): 705–718.
15.
KazarinovNARudoyEMSlesarenkoVY, et al. Mathematical and numerical simulation of equilibrium of an elastic body reinforced by a thin elastic inclusion. Comp Math Math Phys2018; 58(5): 761–774.
16.
ShcherbakovVV. The Griffith formula and J-integral for elastic bodies with Timoshenko inclusions. Z Angew Math Mech2016; 96(11): 1306–1317.
17.
PopovaTRogersonGA. On the problem of a thin rigid inclusion embedded in a Maxwell material. Z Angew Math Phys2016; 67(4): 105.
18.
PyatkinaEV. Optimal control of the shape of a layer shape in the equilibrium problem of elastic bodies with overlapping domains. J Appl Indust Math2016; 10(3): 435–443.
19.
LazarevNEverstovV. Optimal location of a rigid inclusion in equilibrium problems for inhomogeneous two-dimensional bodies with a crack. Z Angew Math Mech2019; 99(3): e201800268
20.
LazarevNPItouHNeustroevaNV. Fictitious domain method for an equilibrium problem of the Timoshenko-type plate with a crack crossing the external boundary at zero angle. Jpn J Ind Appl Math2016; 33(1): 63–80.
21.
ItouHKovtunenkoVARajagopalKR. Well-posedness of the problem of non-penetrating cracks in elastic bodies whose material moduli depend on the mean normal stressInt J Eng Sci2019; 136: 17–25.
22.
KhludnevANegriA. Optimal rigid inclusion shapes in elastic bodies with cracks, Z Angew Math Phys2013; 64(1): 179–191.
23.
KhludnevAM. Shape control of thin rigid inclusions and cracks in elastic bodies. Arch Appl Mech2013; 83(10): 1493–1509.
24.
LazarevN. Existence of an optimal size of a delaminated rigid inclusion embedded in the Kirchhoff–Love plate. Bound Value Probl2015; 1: 180.
25.
RudoyEMShcherbakovVV. Domain decomposition method for a membrane with a delaminated thin rigid inclusion. Siberian Electron Math Rep2016; 13(1): 395–410.
26.
LazarevNP. Optimal control of the thickness of a rigid inclusion in equilibrium problems for inhomogeneous two-dimensional bodies with a crack. Z Angew Math Mech2016; 96(4): 509–518.
27.
KhludnevAMKludnevAMNovotnyAASokołowskiJ, et al. Shape and topology sensitivity analysis for cracks in elastic bodies on boundaries of rigid inclusions. J Mech Phys Solids2009; 57(10): 1718–1732.
28.
HintermüllerMKovtunenkoVA. From shape variation to topology changes in constrained minimization: a velocity method based conceptOptim Meth Softw2011; 26(4–5): 513–532.
29.
NovotnyAASokołowskiJ. Topological derivatives in shape optimization. In: Interaction of Mechanics and Mathematics. Berlin: Springer-Verlag, 2013.
30.
RudoyEM. Shape derivative of the energy functional in a problem for a thin rigid inclusion in an elastic body. Z Angew Math Phys2015; 66(4): 1923–1937.
31.
RudoyEM. First-order and second-order sensitivity analyses for a body with a thin rigid inclusion. Math Meth Appl Sci2016; 39(17): 4994–5006.
32.
LazarevNPRudoyEM. Optimal size of a rigid thin stiffener reinforcing an elastic plate on the outer edge. Z Angew Math Mech2017; 97(9): 1120–1127.
33.
BaiocchiCCapeloA. Variational and Quasi Variational Inequalities. New York: John Wiley and Sons, 1984.
34.
HlaváčekIHaslingerJNečasJ, et al. Solution of Variational Inequalities in Mechanics. New York: Springer-Verlag, 1988.
35.
KhludnevAM. Problem of a crack on the boundary of a rigid inclusion in an elastic plate. Mech Solids2010; 45(5): 733–742.
36.
RudoyEM. Asymptotics of the energy functional for a fourth-order mixed boundary value problem in a domain with a cut. Siberian Math J2009; 50(2): 341–354.