
Abstract
This paper presents a time-domain optimal design procedure for adaptive negative stiffness devices (ANSDs) installed in inelastic building frames. The structure is modeled as a nonlinear shear-type system with hysteretic restoring forces, classical viscous damping with approximately uniform modal damping ratios, and story-wise ANSDs composed of a negative stiffness device and a nonlinear fluid viscous damper. A state-space formulation suitable for gradient-based optimization is derived, and an objective functional is defined that combines a shear-energy measure based on squared story-shear histories over an ensemble of ground motions with penalties on changes in ANSD stiffness and damping coefficients. Sensitivities of this functional with respect to the device parameters are obtained via an adjoint (Lagrange multiplier) formulation, evaluated in discrete time, which enables an efficient iterative tuning scheme. The methodology is demonstrated using an eight-story reinforced-concrete frame, idealized as a planar shear building, and subjected to 15 recorded earthquakes. The tuned devices reduce the shear-energy measure for most records, yield modest decreases in peak base shear and floor accelerations for critical motions, and prevent collapse under one previously critical record with only moderate adjustments of the ANSD parameters.
Keywords
Introduction
Modern seismic design must address conflicting objectives: ensuring structural safety, limiting damage and economic loss, and maintaining serviceability under strong ground motions. Achieving these goals is challenging when structures are driven into the nonlinear or inelastic range. Optimal control provides a framework in which seismic performance targets—such as reduced displacements, accelerations, or energy dissipation—are encoded in a cost functional subject to the structural dynamics, guiding the tuning of passive and semi-active devices in a systematic way rather than by trial and error (Takewaki and Akehashi, 2021; Zakian and Kaveh, 2023).
The integration of optimal and robust control into structural engineering has advanced the design of passive and semi-active systems that strategically adjust stiffness and damping to enhance seismic performance. Early work by Kelly et al. (1987), Gluck et al. (1996), Takewaki (1997), and Takewaki and Yoshitomi (1998) established key concepts for damper placement and parameter tuning using transfer-function norms and LQR-based formulations. Subsequent studies extended these ideas to more complex devices and scenarios, for example, analysis-redesign procedures for drift-constrained frames (Shmerling et al., 2018), robust semi-active base isolation (Zhang et al., 2020), short-horizon acceleration-predictive control with fluid viscous dampers (Shmerling and Gerdts, 2023), and frequency-response-based optimization of viscous dampers (Gao and Lu, 2024). In this context, Wang et al. (2021) proposed a fixed-point optimum design and performance evaluation of a tuned inerter–negative-stiffness damper for seismic protection of single-degree-of-freedom structures, and Gao et al. (2023) extended this line of work to performance improvement and demand-oriented optimum design of tuned negative-stiffness inerter dampers for base-isolated structures. Many of these approaches, however, rely on linear-elastic or equivalent-linear representations of earthquake response (Cimellaro, 2009; Etedali and Tavakoli, 2017; Tehrani and Harvey, 2019; Özuygur and Gündüz, 2018).
Nonlinearity and interaction effects have been considered in several contributions, including soil–structure interaction (Özuygur and Gündüz, 2018), dual-mode systems under extreme loading (Tehrani and Harvey, 2019), magnetorheological devices under nonlinear excitation (Pohoryles and Duffour, 2015), and broader reviews of optimal-control techniques for building frames (Ho, 2024). Nevertheless, linear or equivalent-linear models cannot fully capture the degradation of stiffness, pinching, or residual deformations in reinforced concrete and steel frames under strong shaking (Oh et al., 2023). This motivates methods that can operate directly on inelastic time-domain response while remaining computationally tractable.
In parallel, negative stiffness devices (NSDs) have attracted growing interest as tools for vibration and seismic control. Reviews by Li et al. (2020) and Wang et al. (2019) summarize how negative stiffness can be exploited to enhance isolation and damping. Analytical and experimental studies have demonstrated the potential of NSDs for seismic protection, including analytical and shake-table investigations of negative-stiffness devices for isolated structures (Sarlis et al., 2011, 2016), nonlinear viscous-damping-based negative stiffness isolation systems (Hu et al., 2024), and H2-optimized negative-stiffness and inerter-based dampers (Islam and Jangid, 2023). From a performance-based perspective, Idels and Lavan (2021) proposed an optimization-based seismic retrofitting methodology for frame structures using negative stiffness devices and fluid viscous dampers, explicitly targeting drift and acceleration criteria. These works demonstrate that negative stiffness mechanisms can be powerful components in seismic control strategies, while also highlighting that device performance is sensitive to modeling assumptions and the choice of objective functions.
Within this context, there remains a need for methodologies that operate directly on inelastic time-domain response, use objective functionals with clear mechanical interpretation, and are compatible with gradient-based tools for realistic frame models and ensembles of ground motions. Many control-based formulations require practitioners to assign abstract weighting coefficients that balance state and control terms, often tuned heuristically, which obscures the link between optimization results and structural performance. The present study addresses these issues by focusing on the optimal tuning of adaptive negative stiffness devices (ANSDs) installed in an inelastic frame model. The frame is idealized as a planar shear building with hysteretic restoring forces and classical viscous damping, characterized by approximately uniform modal damping ratios. Story-wise ANSDs, each composed of a negative stiffness device and a nonlinear fluid viscous damper, are incorporated into the system. A state-space formulation suitable for adjoint-based sensitivity analysis is developed, and a control-inspired objective functional is introduced that aggregates squared story-shear trajectories over a set of ground motions, together with regularization terms on ANSD stiffness and damping coefficients. This gives the weighting matrices a direct mechanical interpretation in terms of shear-force energy and device effort, and the resulting adjoint equations yield gradients that enable an iterative tuning procedure based on the most critical records in the ensemble.
Inelastic system state-space formulation
The inelastic state-space formulation is necessary for control applications. Its formulation is derived in the following section. We begin with the differential equation that governs the inelastic dynamic response, specifically the equilibrium between the horizontal forces applied at the ceiling levels of the structure. The equilibrium is given by

So that for a structure with N-stories (ceiling levels), Frame structure under horizontal deflections.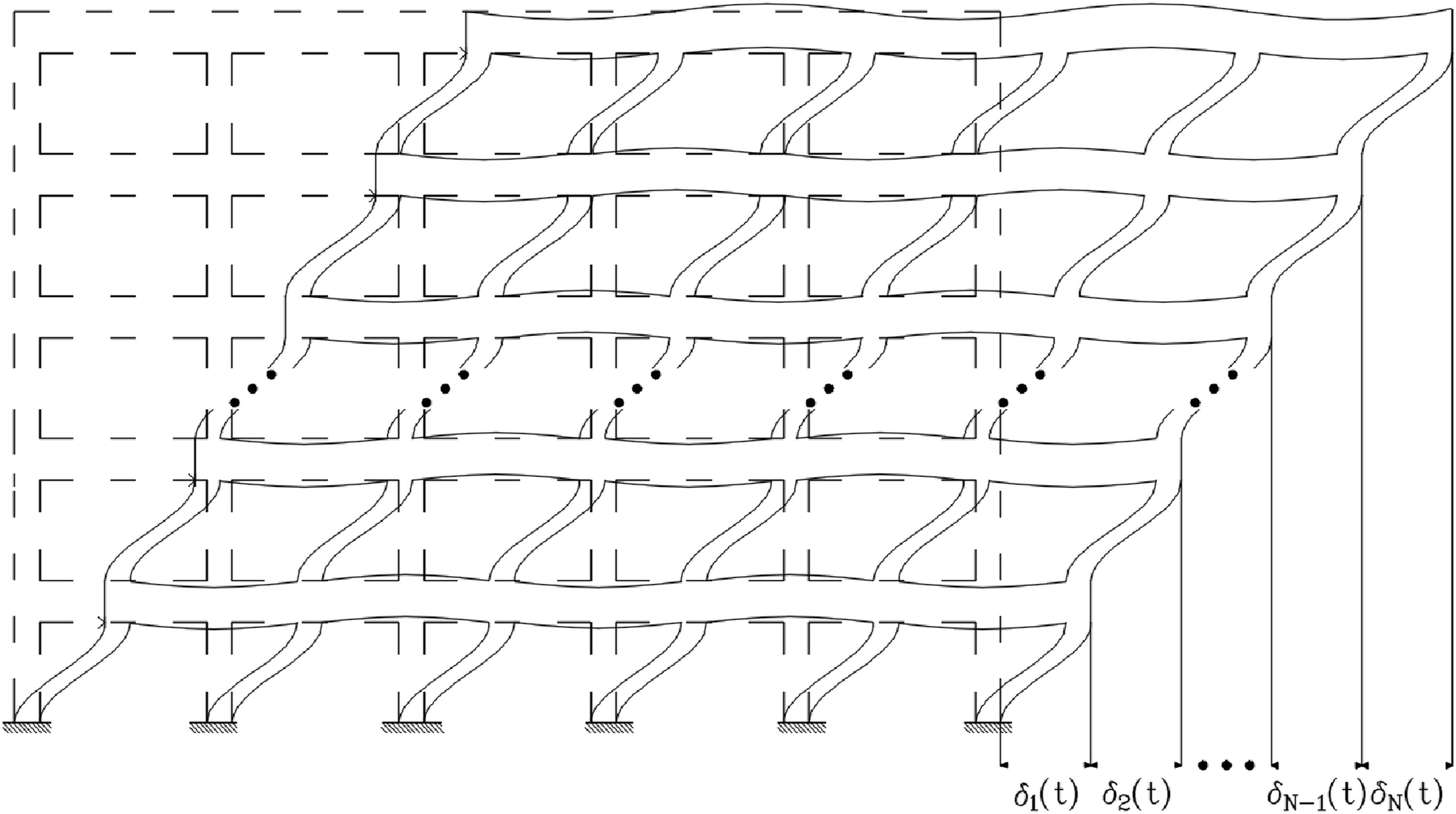



When referting to the horizontal force equilibrium about the drift coordinates (i.e., referring to

So that
Also, in drift coordinates, the applied horizontal earthquake load is expressed as

The inelastic state-space formulation takes after the closed-loop paradigm of Figure 2, which enhances the nonlinear control model suggested by Shmerling and Gerdts (2022) and represents equation (1) as Inelastic system state-space paradigm.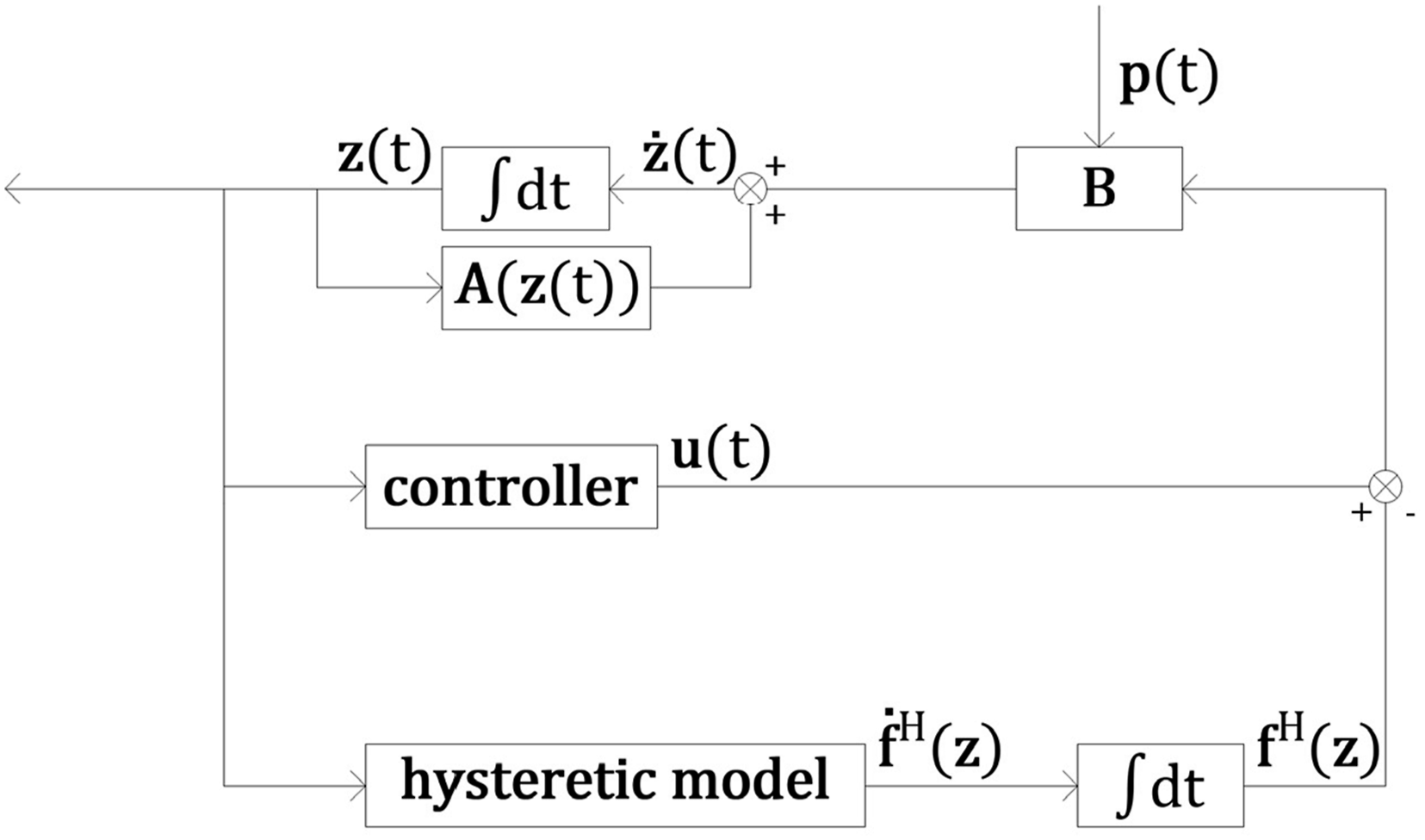

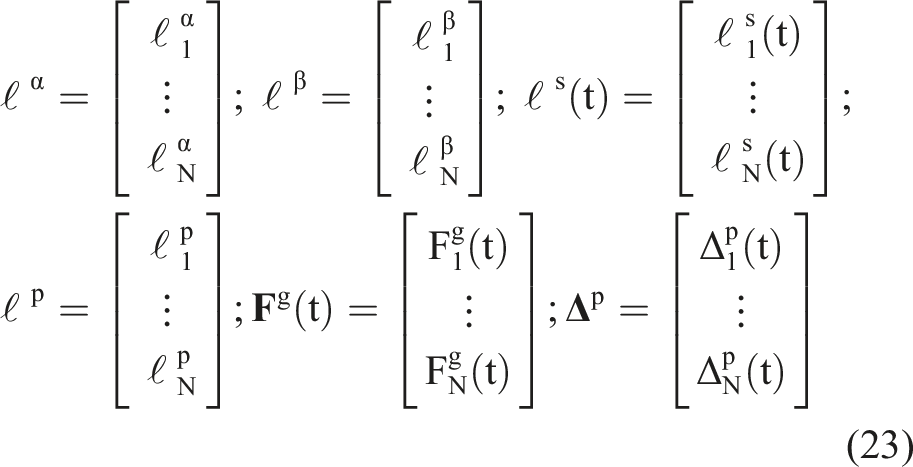
The state vector


The state and input-to-state matrices are defined as


The control force generated by ANSD is composed of two components: the force from the NSD and the force from the NFVD, expressed as

To support the optimal control formulation developed later in this study, the traditional NFVD force model is reformulated. The classical model defines the damper force at each story level n as



Figure 3 illustrates the geometric configuration of the Negative Stiffness Device (NSD), while Figure 4 presents its mechanical behavior under lateral deflection. The control force generated by the NSD at the nth story is governed by the following nonlinear force law: Negative stiffness damper geometrical parameters. Negative stiffness damper under lateral deflection.


The bottom spring force

Equation (17) reveals that the NSD force comprises two components: a primary term governed by the interstory drift


This vectorized formulation enables the use of gradient-based optimization algorithms by explicitly expressing the NSD force vector in terms of design variables
Optimization approach
The proposed methodology aims to optimize the entries of the diagonal matrices
Objective function
Before defining the objective function, the full expression of the ANSD control force is established. To this end, the NFVD and NSD force models given in equations (16) and (22) are substituted into equation (12), resulting in the explicit control-law formulation:

Since the state vector
The total story shear force


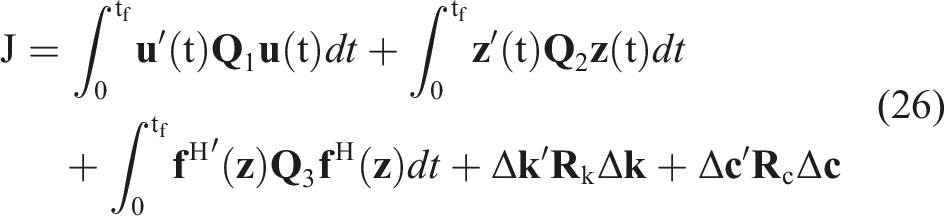
Substituting these definitions into the original formulation, the objective function reduces to

This revised form highlights that the optimization aims to minimize the total story shear force trajectories (in an energy norm sense), while simultaneously penalizing excessive or impractical adjustments to the stiffness (
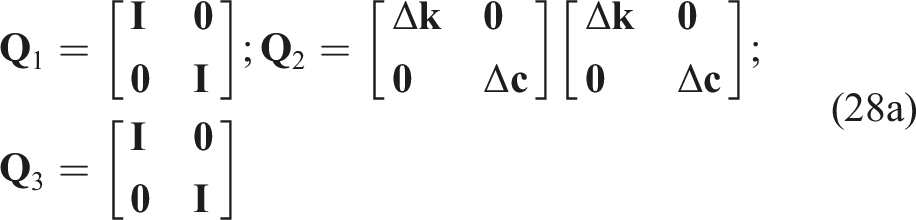
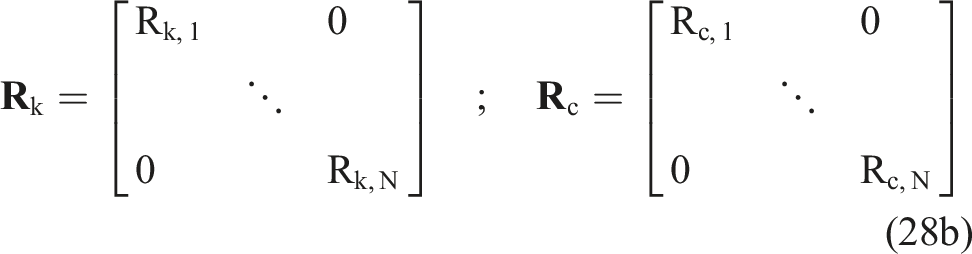
Classical optimal control strategies such as LQR, H2, and H∞ are often sensitive to the choice of weighting matrices in the cost function, which are typically tuned heuristically to balance structural response and control effort. In this work, the weighting matrices associated with stiffness weakening and energy dissipation (
Problem formulation
Building upon the objective function defined in equation (29), the complete optimization problem is formulated by introducing the following constraints:
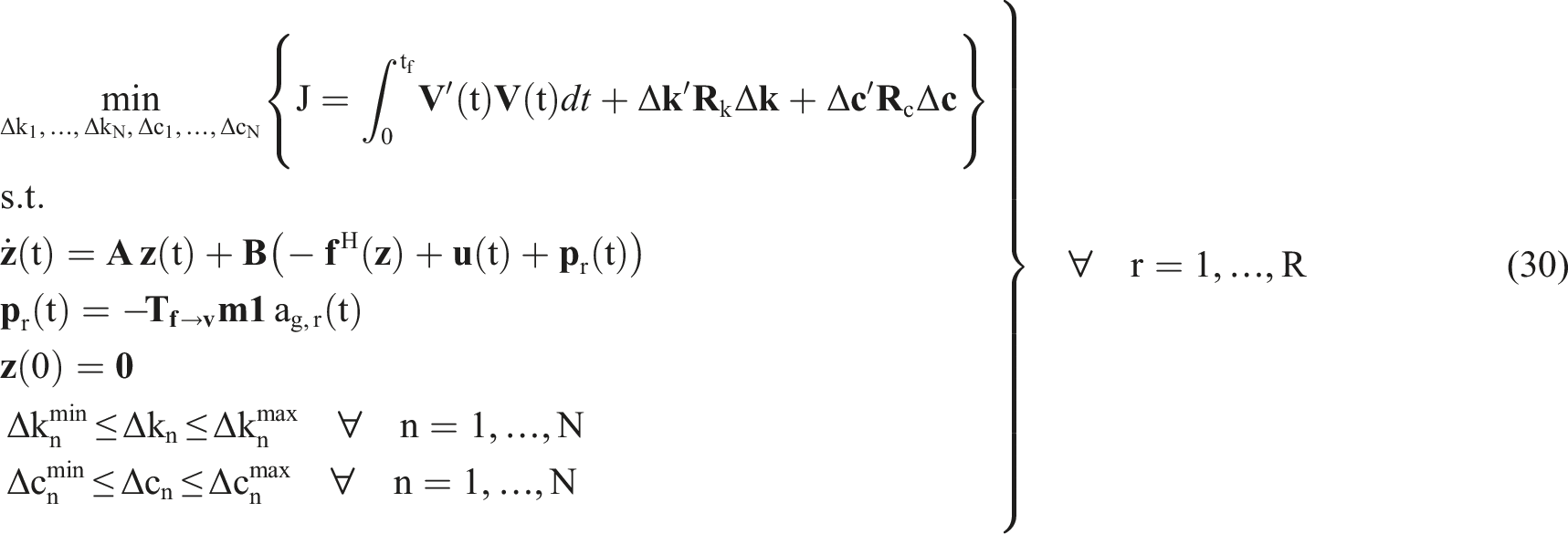
The constraints comprise the dynamic equilibrium of equation (8), the initial conditions, and the bounds on the design variables.
In the present formulation, the weighting matrices
The dynamic equilibrium is formulated using the first-order state-space representation presented in equation (8), incorporating the horizontal seismic excitation defined in equation (7). Zero initial conditions are imposed, as they are necessary for consistently solving the optimization problem. Additionally, design constraints are introduced to define the permissible lower and upper bounds of the design variables, namely, the vertical spring stiffness coefficients
Given that infinitely many combinations of


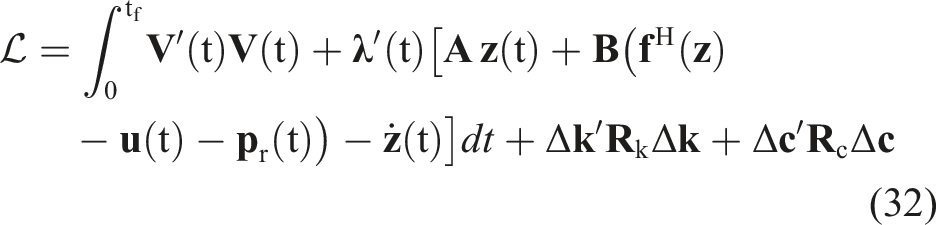
Lagrange multiplier method
To effectively optimize the stiffness and damping parameters for our ANSD, we rigorously apply the principles of variational calculus. The core of this optimization lies in the definition of the Lagrangian, which is meticulously constructed to capture the system’s dynamics and constraints. The Lagrangian, associated with equation (30), is expressed as
A crucial step in simplifying this complex formulation involves judicious application of integration by parts. Specifically, by applying this technique to the sub-term
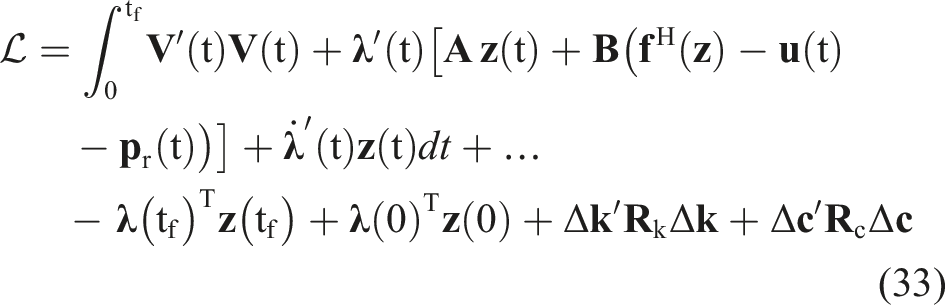
This strategic manipulation, combined with the practical boundary conditions where
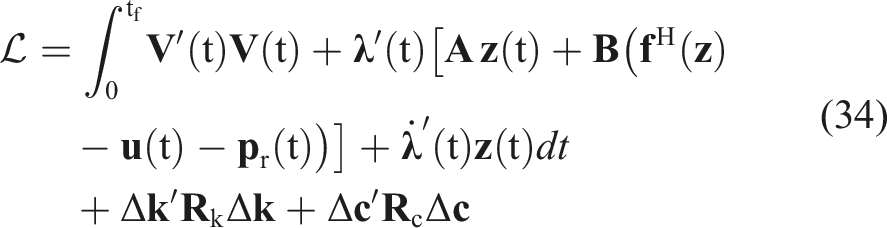
The minimization of this refined Lagrange function is paramount to our optimization strategy. This is achieved by systematically setting the partial derivatives with respect to the state vector



We can derive explicit and highly valuable expressions from these fundamental optimality conditions. Leveraging the relationships



Furthermore, the crucial state vector
Numerical evaluation of (t)
The precise calculation of
To surmount this critical hurdle, we have developed pioneering numerical differentiation equations specifically tailored for the accurate and reliable evaluation of


It is crucial to emphasize that the strategic application of the extended mean-value theorem is a cornerstone of our method’s robustness, guaranteeing superior numerical stability compared to other explicit methods, such as the standard finite difference method, which are often prone to instability in such complex scenarios.
Our optimization framework critically requires that
Equation (40) is not merely a calculation; it represents a key enabler for the practical implementation of our sophisticated optimization. It provides the definitive numerical scheme for accurately evaluating
Optimization procedure
A highly efficient and robust optimization algorithm is developed to translate our sophisticated theoretical framework into practical, implementable solutions. This procedure is meticulously designed to navigate the complex interplay of seismic forces and device parameters, yielding optimal stiffness and damping for Adaptive Negative Stiffness Devices. The algorithm is strategically divided into three interconnected stages, each playing a vital role in ensuring a comprehensive and convergent solution: (i) Algorithm Preparations (ii) Earthquake Response Calculation (iii) Iterative optimization of
This structured, iterative approach is not merely a sequence of steps; it represents a powerful, self-correcting mechanism that converges on the most effective stiffness and damping profiles. The detailed process is fully described herein, demonstrating the sophistication and efficacy of our proposed methodology. 1. Algorithm preparations 1.1 Choose the load cases of R ground acceleration records 1.2 Define the initial NSD vertical spring stiffness coefficients and their design limitations: 1.3 Define the initial NFVD damping coefficients and their design limitations: 1.4 Define the convergence coefficients 1.5 Set the iteration index to 2. Earthquake response calculation for all ground acceleration records 2.1 Perform numerical evaluation for 2.2 Evaluate 2.3 Calculate the objective function: 2.5 Take the largest objective function by 2.6 If 3. Iterative optimization of 3.1 Update 3.2 Perform numerical evaluation for 3.3 Evaluate 3.5 Calculate the objective function: 3.6 Verify that the shear force trajectory has been improved:




If not, update the iteration index “
If yes, check the convergence and update the matrices:

If satisfied, update the most severe earthquake record number “
If not, go to 3.1.
Case study
A numerical case study is conducted on a reinforced concrete moment-resisting frame that forms part of the lateral force-resisting system of an eight-story residential building in Ramat-Gan, Israel. The frame is modeled as a planar eight-story system. Figure 5(a) shows the elevation scheme, and Figure 5(b) presents a photograph of the actual building. Studied moment-resisting frame: (a) elevation scheme and (b) photo of the building containing the planar frame.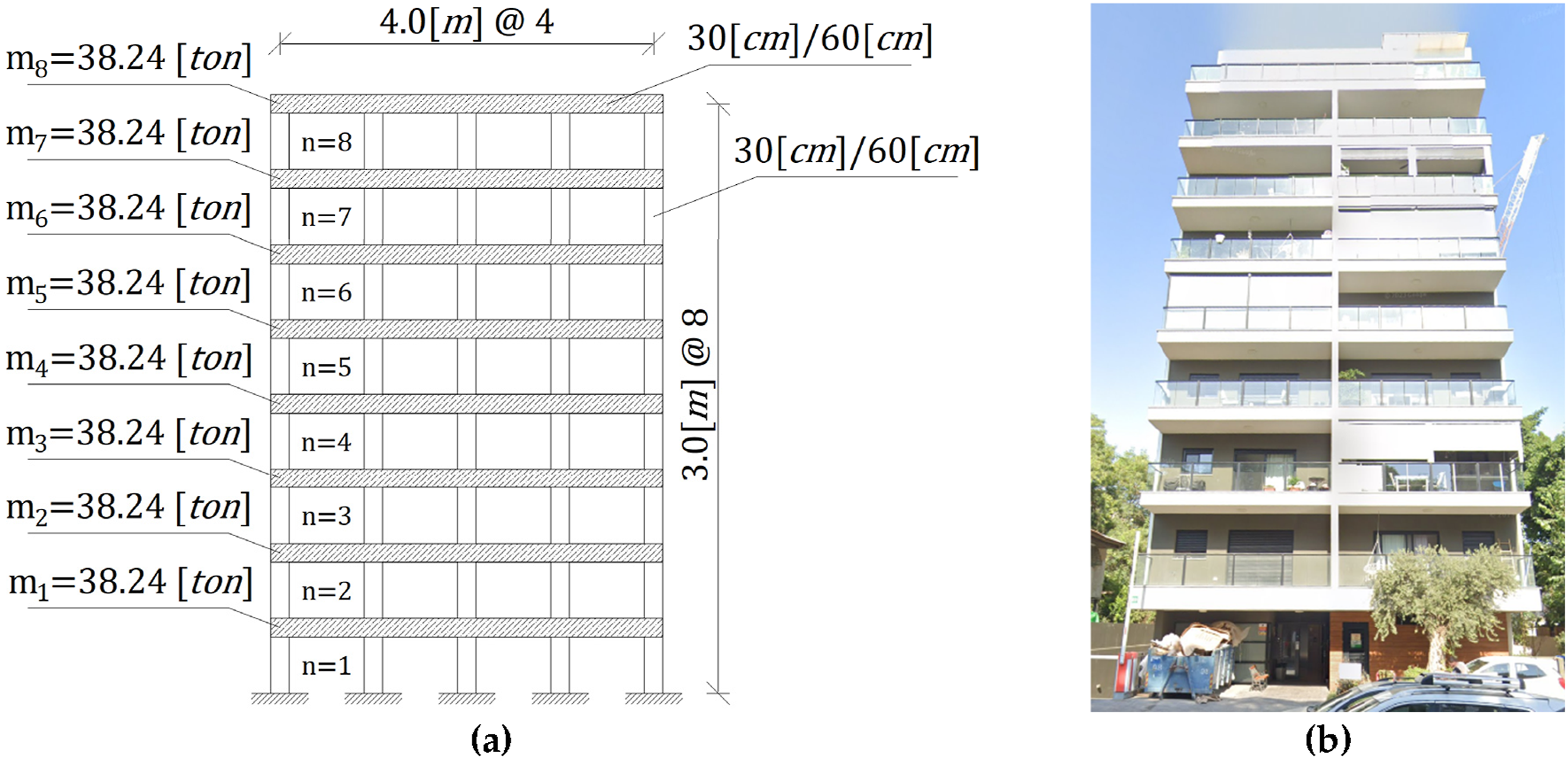
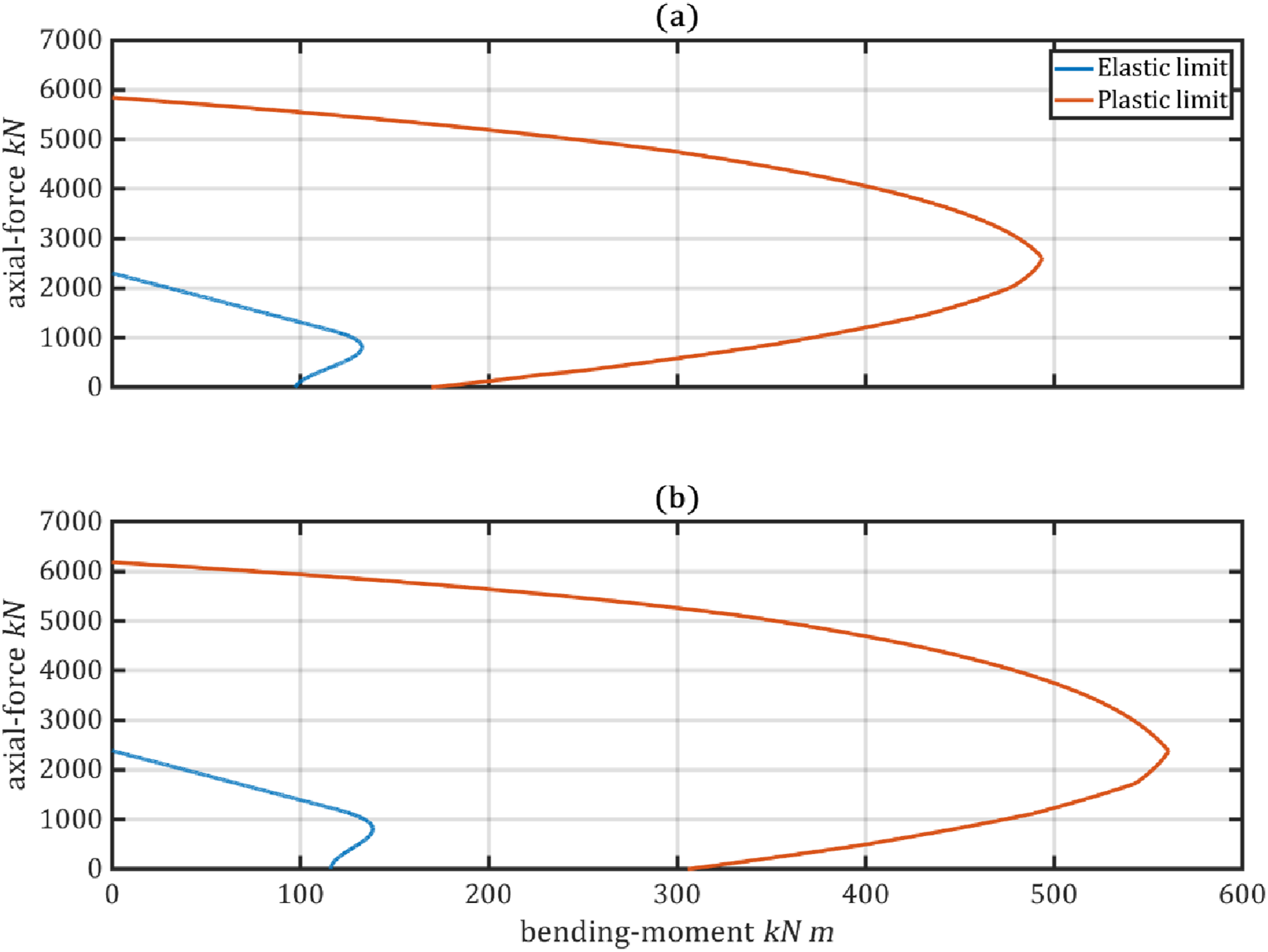
The structural model uses the actual story heights, bay spans, and lumped story masses derived from the building data. Beams and columns are represented by 30 cm × 60 cm rectangular cross-sections, and their longitudinal and transverse reinforcement layouts follow the drawings in Figure 6. Axial force–bending moment interaction diagrams for both beams and columns, as shown in Figure 7, are used in post-processing to assess demand–capacity ratios and define a collapse indicator; however, they do not directly modify the equations of motion in the dynamic analysis. Reinforcement design: (a) beam and (b) column. Cross-section eccentric compression interaction curve: (a) RC beam and (b) RC column.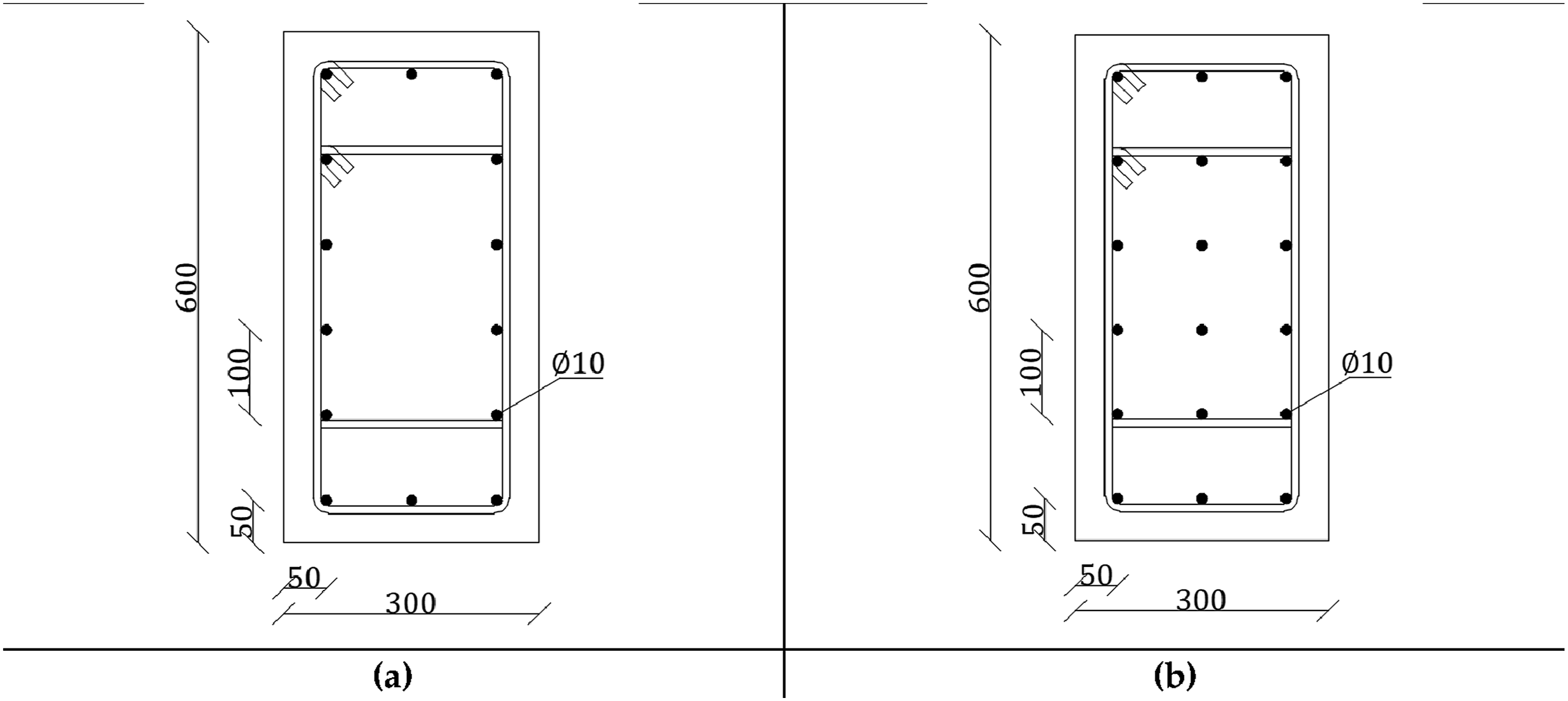
The dynamic properties of the bare frame are characterized by the first three vibration modes, whose periods and mode shapes are reported in Figure 8. A 5% inherent damping ratio is assigned to all modes using a classical viscous damping model, which produces approximately uniform modal damping and represents typical energy dissipation in reinforced concrete buildings. Moment-resisting frame: the three most dominant modal system periods and shapes.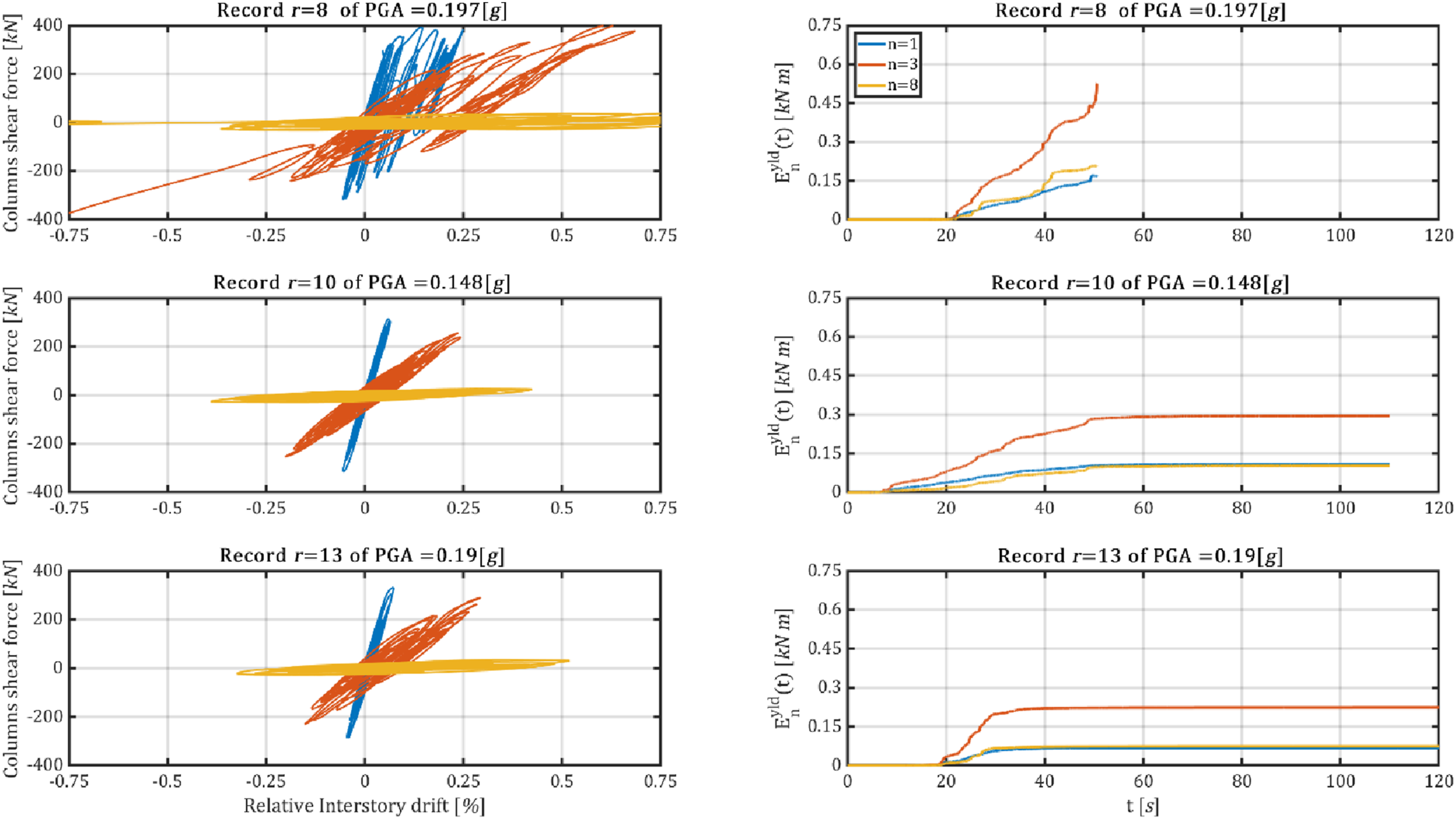
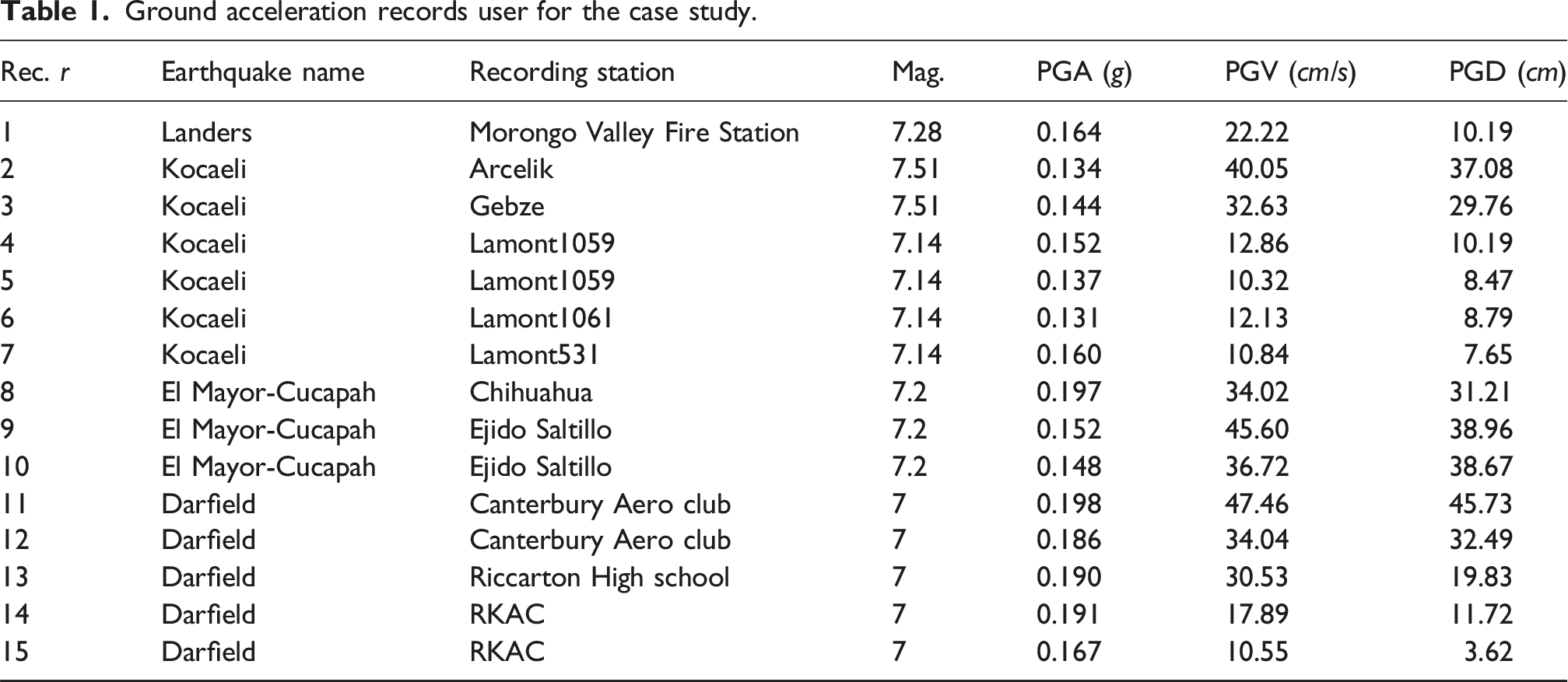
Ground acceleration records user for the case study.
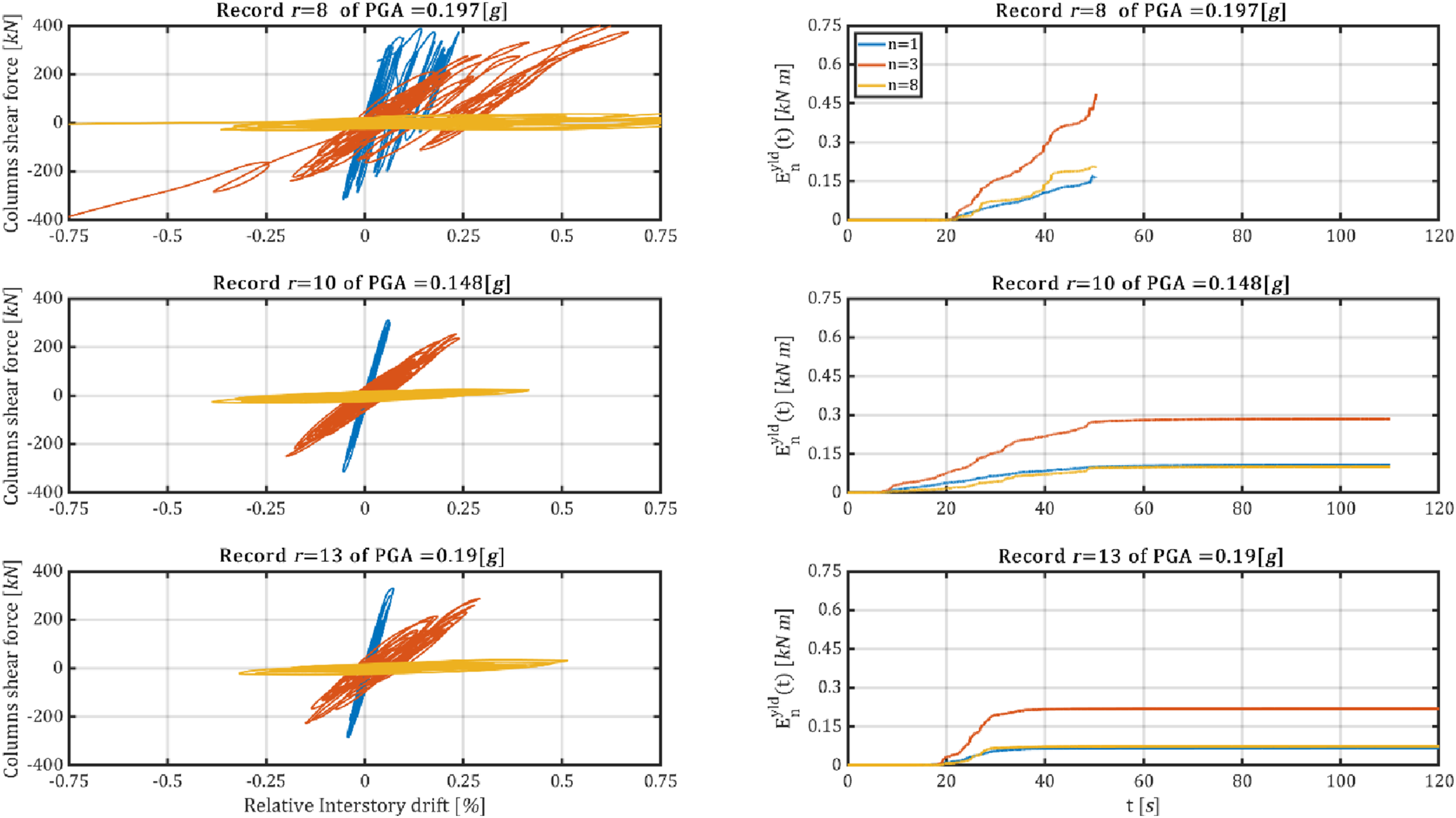
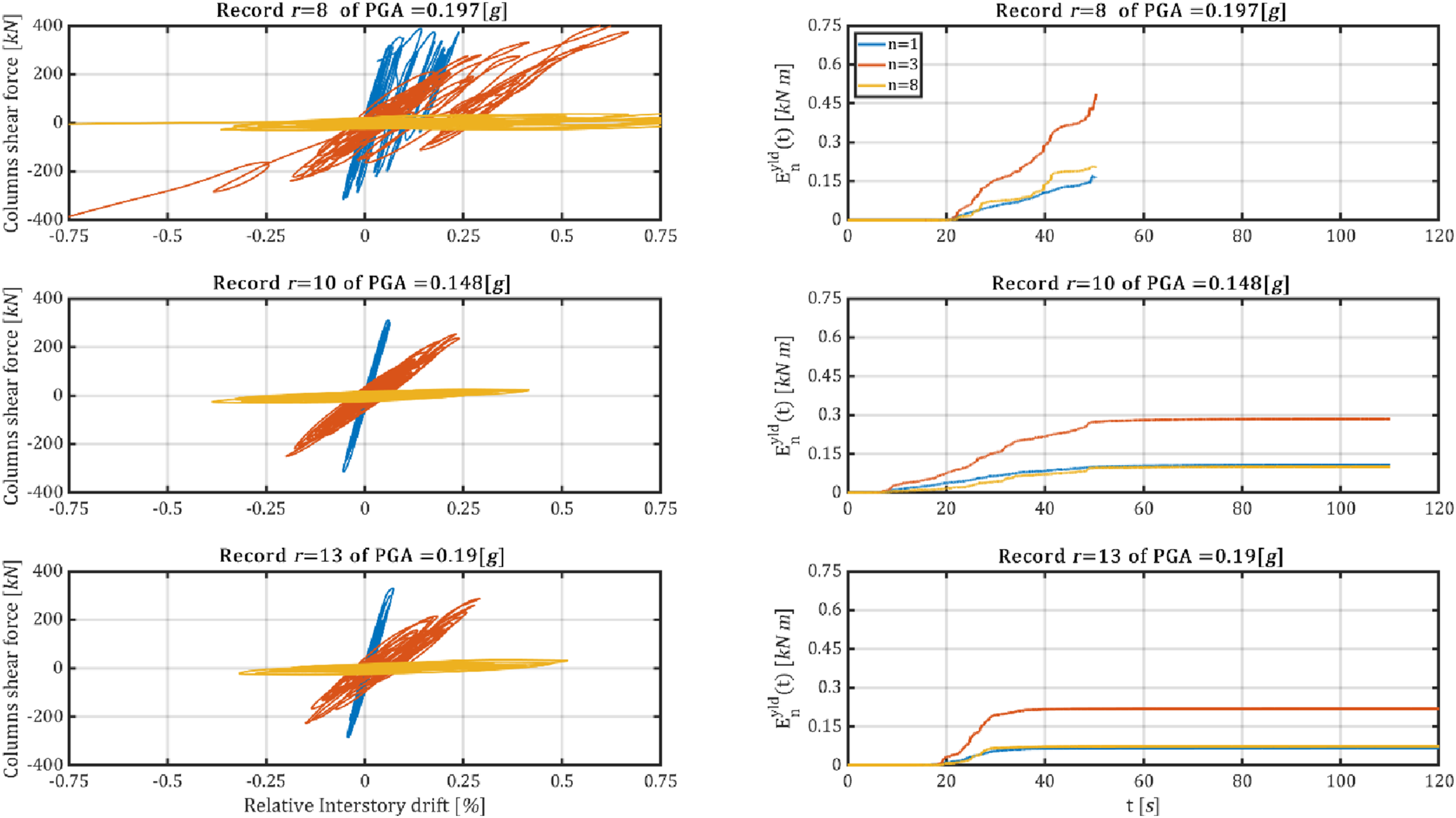
Stories n = 1, 3, 8 response plots under selected ground acceleration records r = 8, 10, 13 (under initial design variables configuration).
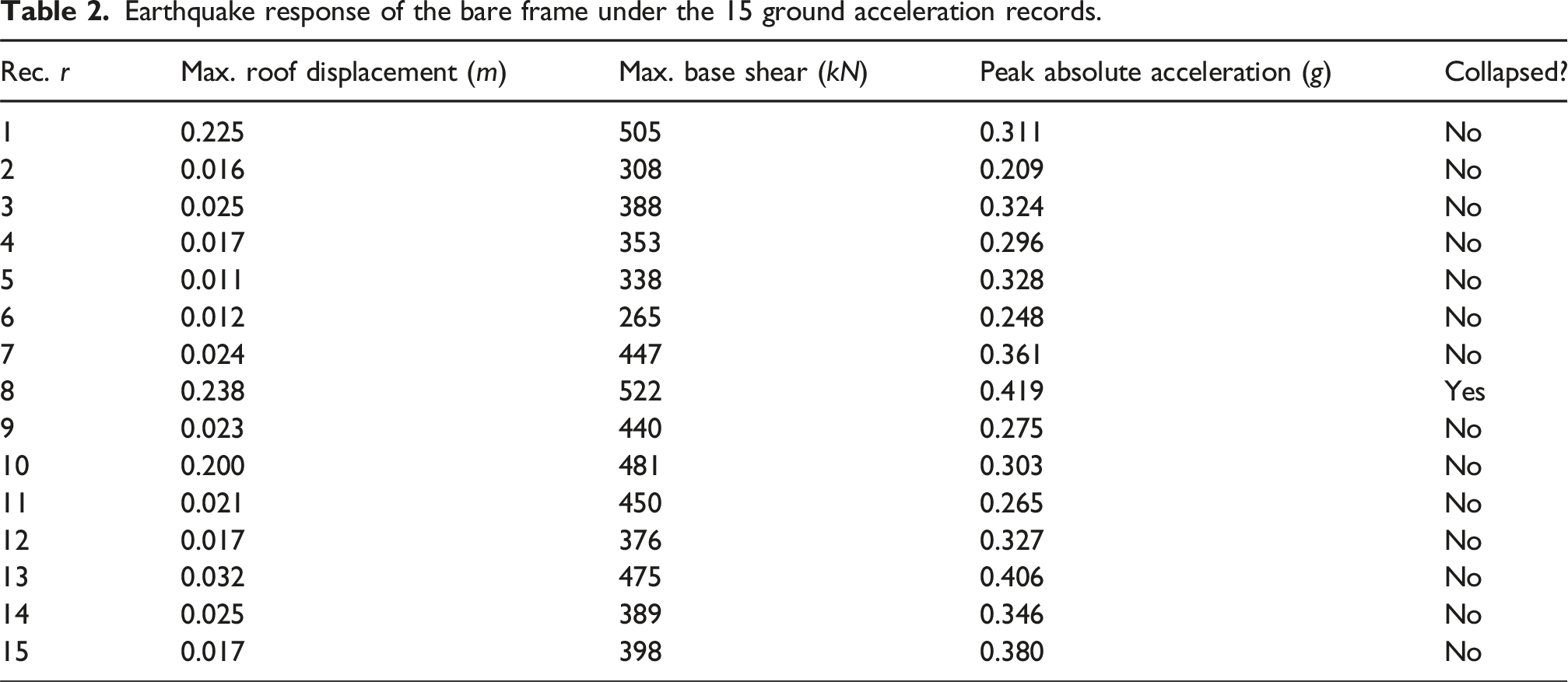
Earthquake response of the bare frame under the 15 ground acceleration records.
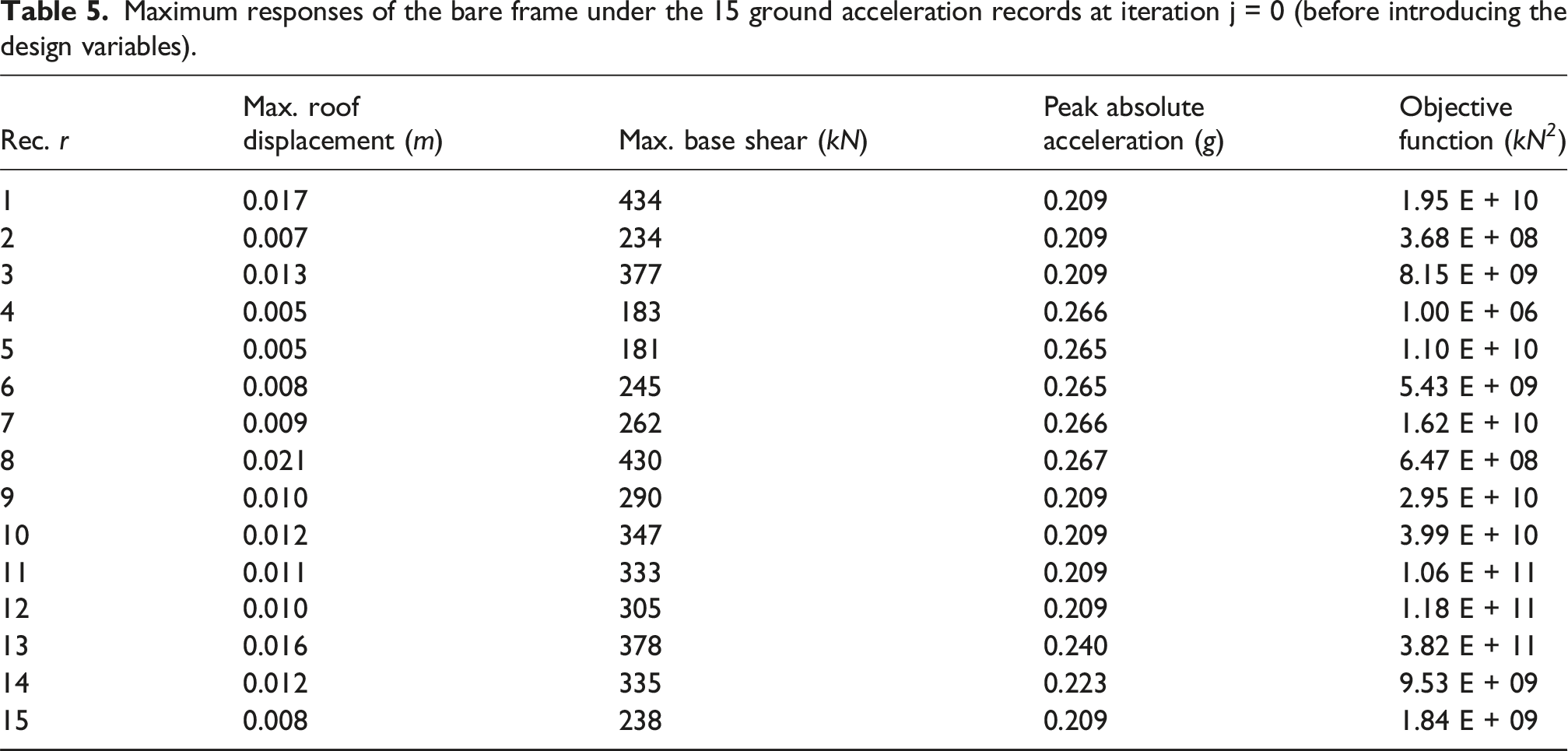
The performance measures examined in the case study include maximum inter-story drift at each story, roof displacement, base shear, peak absolute floor accelerations, and an energy-type objective functional based on the story-shear force trajectories. Inter-story drifts are primarily used to assess damage and potential collapse, while roof displacement and base shear describe the global response, and floor accelerations relate to non-structural demands.
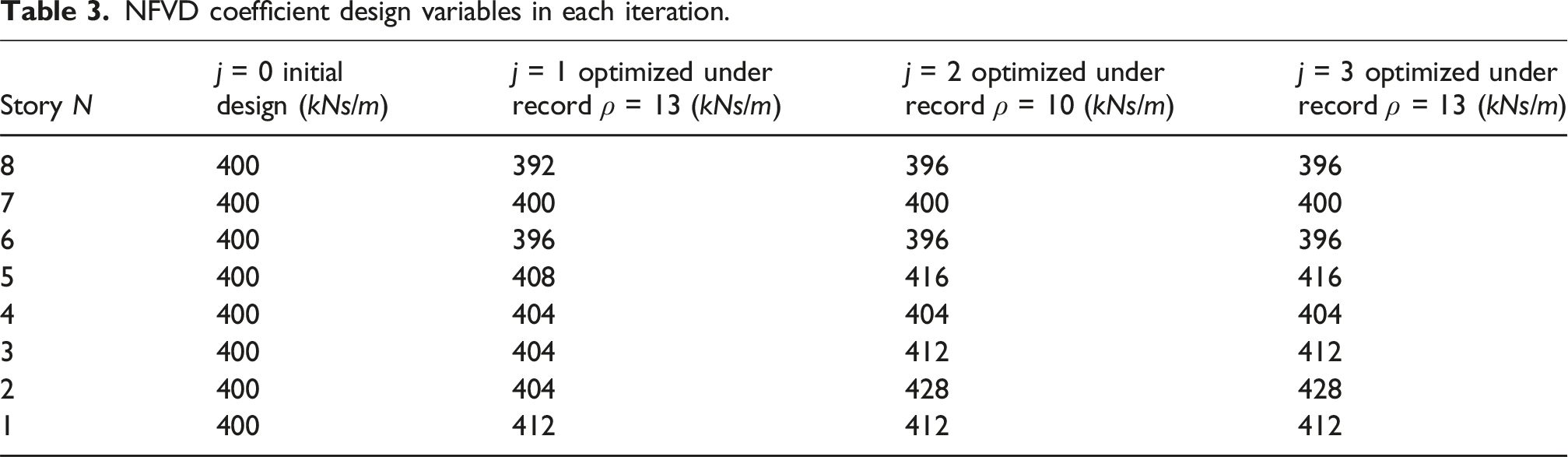
NFVD coefficient design variables in each iteration.
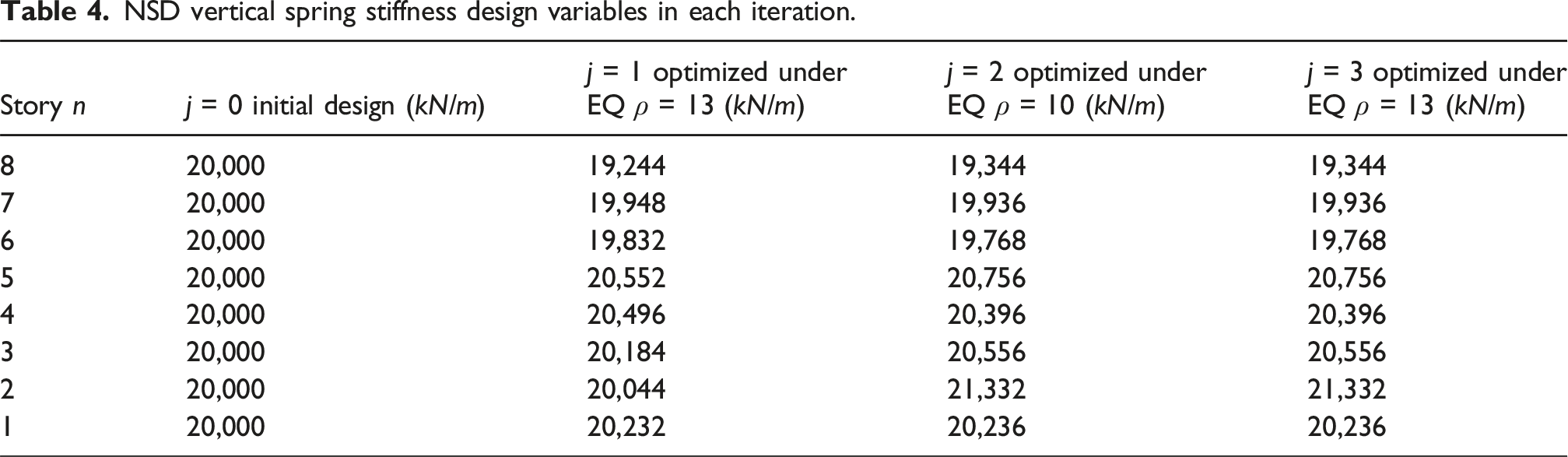
NSD vertical spring stiffness design variables in each iteration.
Maximum responses of the bare frame under the 15 ground acceleration records at iteration j = 0 (before introducing the design variables).
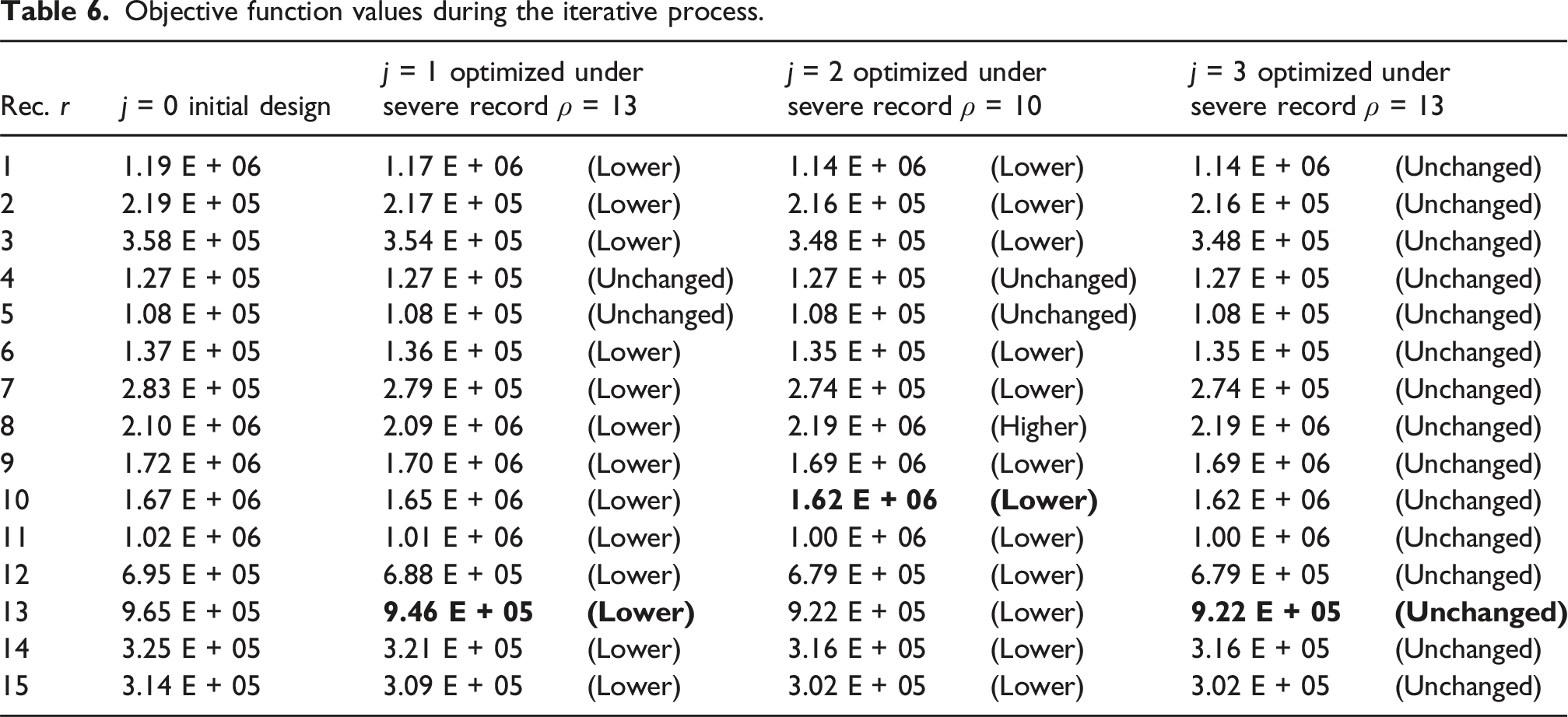
Objective function values during the iterative process.
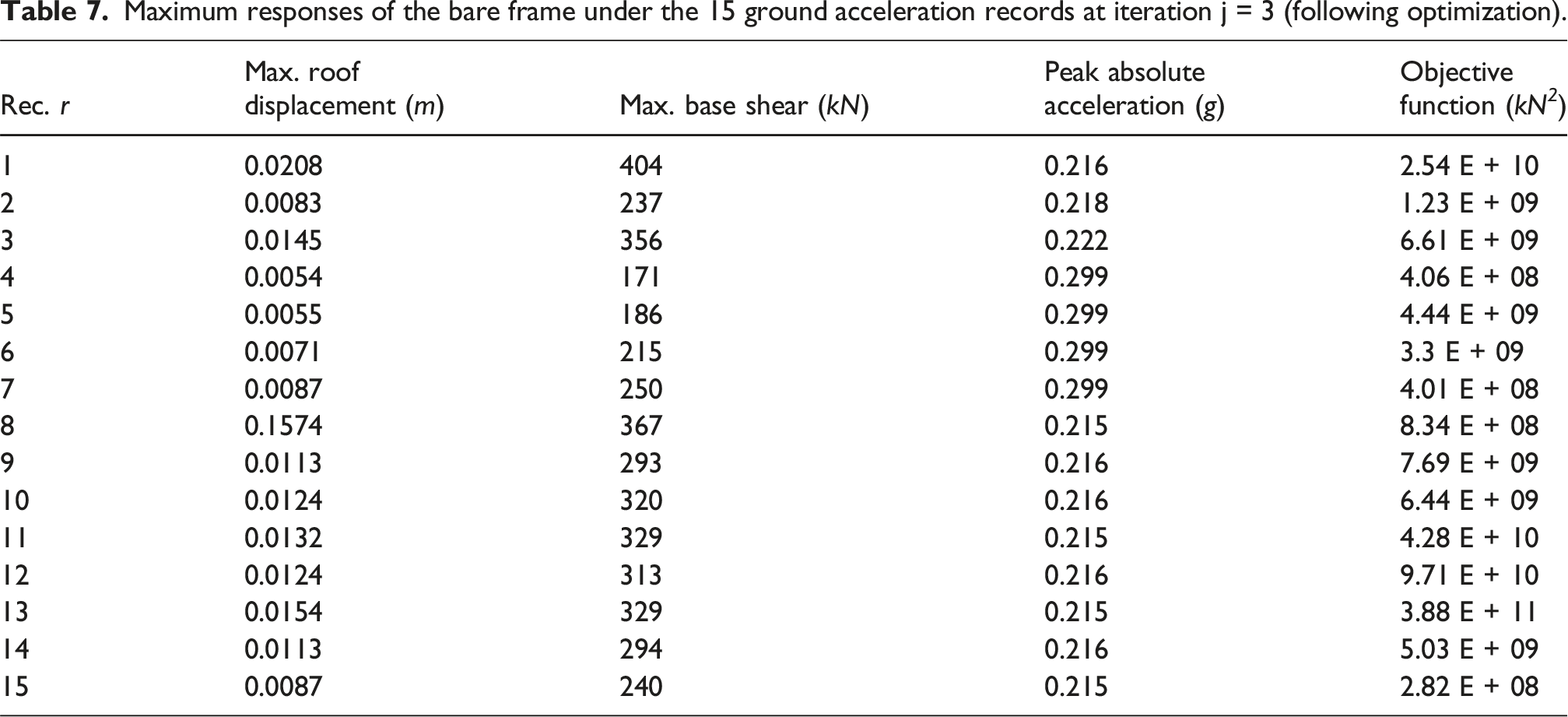
Maximum responses of the bare frame under the 15 ground acceleration records at iteration j = 3 (following optimization).
Story n = 1, 3, 8 responses under ground acceleration records r = 8, 10, 13 under final design variables configuration.
In this case study, only moderate adjustments to the ANSD parameters are introduced. The optimized vertical spring stiffnesses and damping coefficients remain close to their initial design values, with changes on the order of approximately 5–10%. Thus, the optimization primarily acts as a fine-tuning procedure for an already feasible ANSD configuration rather than prescribing a radically different device layout. Within the chosen parameter bounds, this means that the final design is primarily driven by the gradients of the shear-energy objective and is expected to be only weakly sensitive to modest perturbations of the initial ANSD values. That is, different starting configurations with negligible device effects would lead to similar tuned patterns. From a practical standpoint, such changes can be implemented by adjusting pre-compression levels or spring and damper characteristics within typical manufacturing tolerances, without requiring a redesign of the frame or replacement of the devices. At the same time, the example highlights a limitation: if the performance objectives were to demand changes beyond these bounds, the current framework would still indicate the required trends in stiffness weakening and energy dissipation, but the resulting design might be challenging to realize without more substantial modifications to the ANSD hardware or the underlying structural system, and a dedicated sensitivity study with respect to the initial design would then be required.
For record r = 8, the bare frame develops a concentration of inelastic demand and large interstory drift in the third story, leading to bending moments that drive the demand points outside the interaction diagrams for all columns at that level and triggering the collapse indicator. In the tuned ANSD configuration, the additional negative-stiffness and viscous-damping contributions reduce and redistribute the story shears and drifts at this story, so that the peak bending moments and axial–bending interaction ratios remain within the capacity envelope. Consequently, the collapse indicator is not activated for record r = 8, and the tuned ANSD design is interpreted as preventing the collapse mechanism observed in the bare frame.
Summary and conclusions
This paper has presented a time-domain optimal design framework for tuning adaptive negative stiffness devices (ANSDs) in inelastic frame structures subjected to earthquake excitation. The structure is modeled as a nonlinear shear building with hysteretic restoring forces, with ANSDs—each composed of a negative stiffness device and a nonlinear fluid viscous damper—placed at every story. A state-space representation suitable for control and optimization is derived, and a control-inspired objective functional is defined that aggregates squared story-shear trajectories over an ensemble of ground motions, together with terms that penalize changes in ANSD stiffness and damping coefficients. An adjoint (Lagrange multiplier) formulation provides the gradients of this objective with respect to the device parameters, which are evaluated numerically in discrete time and embedded in an iterative parameter-update algorithm.
The framework is applied to an eight-story reinforced concrete frame representing an existing building in Ramat-Gan, Israel, idealized as a planar shear system and subjected to fifteen recorded ground motions scaled to the site-specific hazard. For each record, the analysis evaluates roof displacement, base shear, peak floor acceleration, interstory drift at selected stories and a collapse indicator derived from section interaction diagrams. Starting from an initial configuration in which the ANSDs have negligible effect, the procedure updates the vertical spring stiffnesses and damping coefficients using the earthquakes that yield the largest values of the shear-energy objective.
The numerical results indicate that, for most ground motions, the tuning procedure reduces the shear-energy measure and yields moderate decreases in peak base shear and floor accelerations for the critical records, while keeping changes in device parameters relatively small. In the considered example, the tuned design also prevents a collapse that occurs for one record in the absence of ANSDs. At the same time, the focus on global shear-energy minimization rather than explicit code-based limits allows interstory drifts and response distributions to vary non-uniformly; therefore, the formulation should be viewed primarily as a control-inspired tuning tool rather than a complete performance-based design procedure.
Several modeling simplifications suggest directions for further work. The structural model is planar and shear-type, without soil–structure interaction, torsional effects, or higher-mode localization, and the nonlinear fluid viscous dampers are represented as pure dashpots. The optimization objective does not enforce explicit constraints on drift, acceleration or member demand–capacity ratios. Future research will extend the framework to multi-objective and constrained formulations, incorporate more detailed three-dimensional and soil–structure interaction models, and investigate the experimental or hybrid-simulation validation of tuned ANSD designs.
In this study, the structure is idealized as a two-dimensional moment-resisting frame, and torsional effects, soil–structure interaction, and higher-mode localization in the transverse direction are neglected. In asymmetric or irregular buildings, these phenomena may alter the quantitative seismic response; therefore, the present results should be interpreted as representative of the dominant in-plane translational behavior of the examined frame. It is noted, however, that such planar frame idealizations, combined with codified provisions for torsional amplification (for example, the accidental eccentricity factors in EN 1998-1:2004, 4.3.3.2.4), are consistent with common seismic design practice, and future work will extend the proposed ANSD optimization to more detailed three-dimensional models including torsion, soil–structure interaction and coupled flexural or flexure–shear frame behavior.
Footnotes
Ethical considerations
This article does not contain any studies with human participants or animals performed by any of the authors. Ethical approval was therefore not required.
Funding
The author received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
The numerical models and simulation codes used during the current study are available from the corresponding author on reasonable request. Ground motion records employed in the analyses are available from public strong-motion databases as cited in the manuscript.