Abstract
This study presents a generalised framework for model-free robust decentralised control (MFRDC) of interconnected MIMO dynamic systems, with the goal of significantly reducing complexity in model-based design. A model-free robust sliding mode control, by Lyapunov differential inequality, is presented to achieve simultaneous nonlinear, dynamic, interaction/coupling inversion/cancellation (NDII) for such MIMO systems, which treats the plant/process as a total uncertainty from input to output. The U-control platform is presented, to integrate separately independently designed NDII and an invariant controller (IC) into a complete double loop control system. The associated robust stability and other properties are analysed to provide reference for applications. Two simulated tracking control tests are presented for functionally numerical demonstration, validation of the analytical results and illustration of the transparent procedure for general expansion/applications. These are: a coupled inverted pendulum and a two-input and two-output (TITO) non-affine nonlinear dynamic plant.
Keywords
1. Introduction
With technology advances and ever-evolving cooperation, interconnected manmade systems (e.g. engineering operations in motion and process) show a tendency towards increasing operational procedures and products in scale and complexity. Such systems exist widely and are proliferating: for example, distributed energy resources in power grids (Mukherjee et al., 2020), robot joint subsystems with interconnected dynamic couplings (Dong et al., 2019), coupled inverted pendulums (Ding et al,. 2021), and networked control systems (Bakule, 2014). Such subsystem interconnection also characterises many natural systems and non-engineering organisational operations, such as collective motion in biology, swarm intelligence, cooperative estimation, economic equilibria, and social networks/interactions (Antonelli, 2013). Distributed/decentralised control of such interconnected dynamic systems has been an active research and application topic (Antonelli, 2013). Compared with centralised control, decentralised/distributed control has been shown to display the following characteristics, (1) generally simpler and cheaper in design and cost, (2) generally stronger in fault tolerance, and (3) generally facilitating large network control strategies and algorithms. Conversely, the decentralised control requires more comprehensive specialist knowledge in design and analysis (Bakule, 2008). It has been observed from research publications that associated interdisciplinary research fields are increasingly attracting researchers and practitioners from different subject communities (Antonelli, 2013; Zhang et al. 2020). This study focuses on critical review of some representatively related approaches to justify motivation: model-free robust decentralised control and some major contributions.
1.1. Decentralised control of interconnected systems
The most popular class of the approaches is to take the system plant nominal models as reference to design the control systems with specified control objectives in transient and steady state responses, which inaccuracy and/or variation of the parameters of the models are treated as uncertainties. For the model-based control, including dealing with nominal models and time varying models (Chen et al., 2021), and the challenging issues in the control are related with nonlinear dynamics, dynamic coupling effects, and a commonly agreed critical challenge in determining appropriate configurations/solution procedures so that each subsystem achieves the specified performance in the presence of uncertainty, such as parameter variation, unmodeled components, and unknown interconnections. Some selected approaches dealing with interconnection-induced difficulties are quoted here: neural network topologies have been presented for connection of structures storage and the dissipativity of subsystems (Jokić and Nakić, 2019). Model-based sliding mode techniques (Ding et al., 2021) have been successfully applied to decentralised control of uncertain nonlinear interconnected systems. Neural network enhanced control has been another popular approach in improving the robustness/adaptive functionalities (Li et al., 2021). Graph theory has been an important tool for decentralised adaptive fault-tolerant control of a class of strong interconnected nonlinear systems (Ma and Xu 2020). Fault detection/accommodation in interconnected systems has also attracted attention (Ma and Xu 2020; Zhao and Polycarpou 2021). A new and worthwhile result for dealing with output constraints is being pursued in academic research and applications (Hua et al., 2021). In summary, model-based approaches have achieved various significant results and will continue to be the predominant methodology in research and applications. However, as every model-based approach has a common drawback, that is, sensitivity to model uncertainty, additional effort, and computational cost is required in the control system’s design. To the authors’ best knowledge, addressing of the problems in alternative approaches, model-free control methodology has been studied, but not in-depth, with the interconnected system topologies.
A popular approach in coping with uncertainties has been the use of adaptive control to achieve model-free decentralised control (Dong et al. 2019). However strictly speaking this is not a type of model-free control, as almost all adaptive control publications still use online estimated models for controller design. The bottleneck issue of not having model-free decentralised control of interconnected plants lies in the lack of proper configuration and mathematical formulation dealing with nonlinear dynamic coupling between states/outputs. The other class of the representative approach is to use data-driven based learning control to deal with distributed systems (Mukherjee et al. 2020). Obviously, this approach is time-consuming due to use of reinforcement learning to calculate the optimal control gains. Improvement of computational efficiency could therefore be another motivation for new studies.
It should be emphasised that even though this study has focused on model-free control, the importance of the modelling role in facilitating control system design is not denied, especially in simulation studies. In practice, particularly in industrial applications, great effort has been made on experiments and tests for modelling and understanding of underlying plants/processes prior to control system design. Model-free control system design still requires fundamental system model knowledge, such as stable, controllable, observable, dynamic order, delayed time, actuator saturation, etc. even not requiring accurate/nominal quantitative models. In a broad sense, model-free control is a supplement to model-based control and reduction of tedious modelling work and the control design complexity.
1.2. U-control – robust double dynamic inversion
U-control has been progressed from model-based (matched and mismatched) to model-free design. The kernel foundation of the method is double dynamic inversion to provide simplicity and generality (solutions) from complexity (problems). Some selected publications are presented here for reference: Model-based U-control (Zhu and Guo 2002) achieves general linear pole-placement control by integration of solving Diophantine equation and nonlinear dynamic inversion, one work (Li et al. 2020) derives a general procedure for U-model-based dynamic inversion, one study (Zhang et al. 2020) establishes the U-Model and U-control methodology for nonlinear systems, a new publication propose a robust U-control of nonlinear dynamic models with disturbance observer (Li et al. 2022). For model-free U-control: Zhu (2021) presents a foundation platform to develop model-free sliding mode control (MFSMC) for dynamic inversion, another work (Zhu et al. 2023) applies the MFSMC to a new configuration of composite nonlinear feedback control for nonlinear systems with input saturation. There have been several application-based studies, observed based U-control of COVID-19 (Wei et al., 2022), U-control based under-actuated coupled nonlinear adaptive control model for multivariable unmanned marine robotics (Hussain et al. 2019), and U-model enhanced trajectory tracking control of quadrotors (Li et al. 2023). With U-control insight, researchers have tried to provide supplementary references to various well-established control methods in terms of generality and simplicity. For U-control enhanced decentralised systems, this is the first study with novelty in solution of robust model-free decoupling.
1.3. Justification of the study
Motivated by the above analysis, this study tries to remove control system design dependence on plant models (by dynamic inversion), increases the system robustness and decoupling effectiveness (through model-free SMC), and expand the generality (through model-free) and simplicity in design and implementation (U-control, NDII, and IC). The study also provides computational demonstration on the selected bench tests for understanding and applications. The significant contributions from the study are as follows: (1) To the author’s best knowledge, this is the first study to take a dynamically interconnected nonlinear plant as a total uncertainty, to propose the nonlinear, dynamic, and interconnection inversion (NDII) to establish a foundation for generalised model-free robust decentralised control. (2) Conceptual configuration of the NDII only requires measured errors and their derivatives vector in a closed loop control of a bounded input and bounded output (BIBO) system. Analytical generalisation of the NDII is derived from an expanded SISO model-free sliding model control (MFSMC), which adds dynamic decoupling to accommodate interconnections/couplings between the subsystem dynamics. (3) Simulation studies with U-control platforms take computational experiments with interconnected/coupled nonlinear dynamic plants. This is not only used to validate the analytical results, but also to provide transparent guidance for future applications.
The rest of the study includes four sections. Section 2 presents preliminaries for the reference conducting the follow up development. Section 3 derives NDII to lay the foundation for model-free control and analyses the associated properties to provide reference for applications. Section 4 presents the MFRDC framework and proves the associated properties based on the U-control platform. Section 5 conducts bench tests of two selected examples on a comprehensive computational experimental platform, to demonstrate the analytical results, validate the control system configuration of the functional block connections, illustrate a transparent application procedure, and compare with the other representative approaches. Section 6 summarises the study with its major outcomes and potential impacts and suggests future research directions. An appendix shows some extra simulation results generated from the other comparative approach, which otherwise will be over the paper length limits.
2. Preliminaries
2.1. Interconnected systems
Consider a general model for describing interconnected nonlinear MIMO systems (Ding et al., 2021)

2.2. Model-free U-control systems
Figure 1 Model-free U-control platform.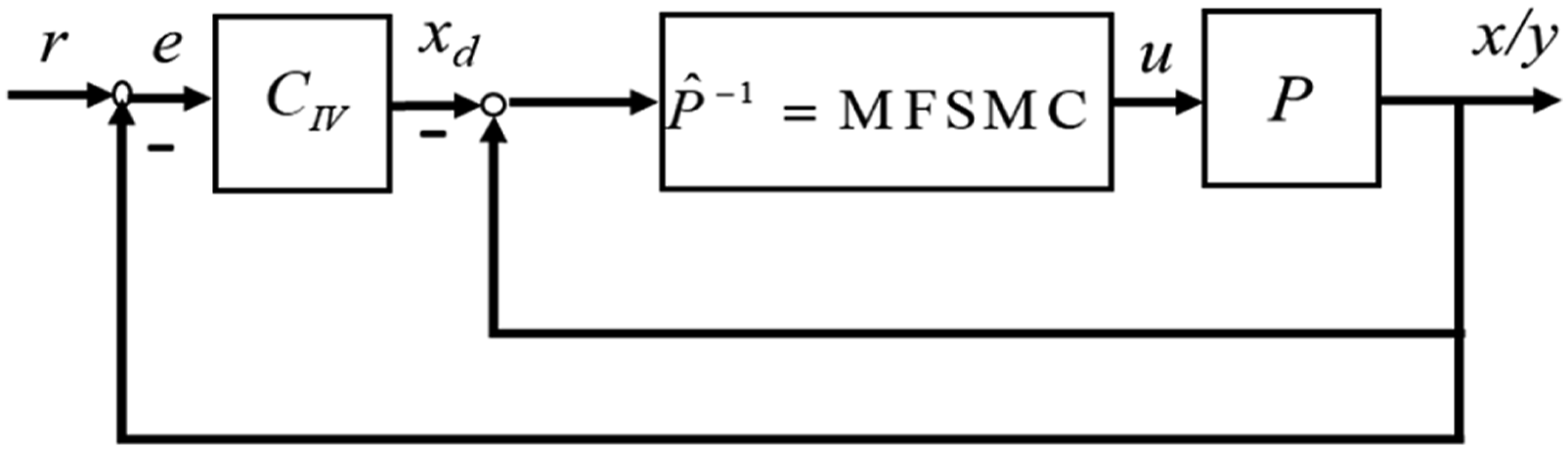
This study uses the U-control platform to integrate the functional components
3. Model-free nonlinear dynamics, and interconnections inversion
SISO model-free nonlinear dynamic inversion can be expandable to interconnected MIMO systems, in which coupled dynamics are treated as uncertainties. Accordingly, for MIMO systems, this type of inverter covers the inversion/cancelation of nonlinearities, dynamics, plus interconnections/couplings.
3.1. Design of system output-based sliding function
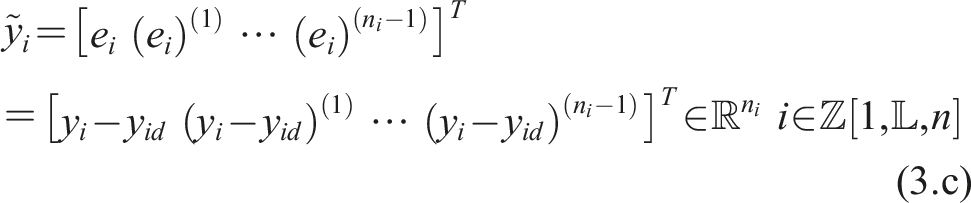
Consider a further generalised system description of an input-output model from the interconnection state space model of (2.1)

To design the model-free SMC, take a single line of the subsystem in (3.a), assign the desired output


The decentralised sliding mode functions construct a basis for proposing a mechanism to decouple the dynamic interactions in the decentralised control.
3.2. Nonlinear, dynamic, interaction/coupling inversion/cancellation
For the general interconnected dynamic plant (3.a) (let
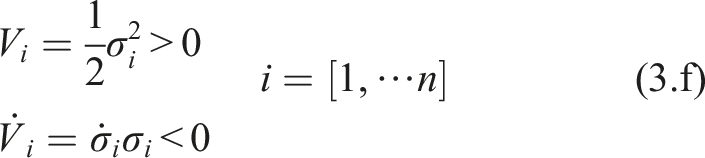
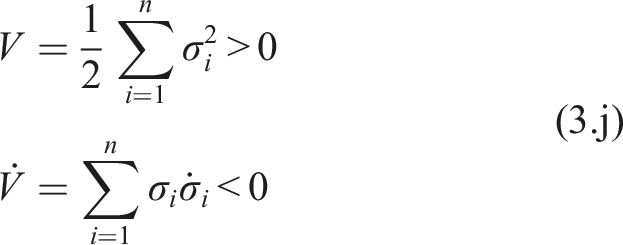
Define For the switching control Therefore, the whole system under model-free NDII is Lyapunov stable, satisfying, This indicates, while on the sliding mode,






There are various choices of determining

Regarding the NDII convergent speed, which is determined by the selection of the function 1) Proportional control, 2) The Proportional and integral control,
4. Model-free robust decentralised control
Figure 2 shows the MFRDC system configuration. From the decentralised control system design convention (Bakule 2008), this MFRDC is configured with the following two phases. MFRDC system configuration.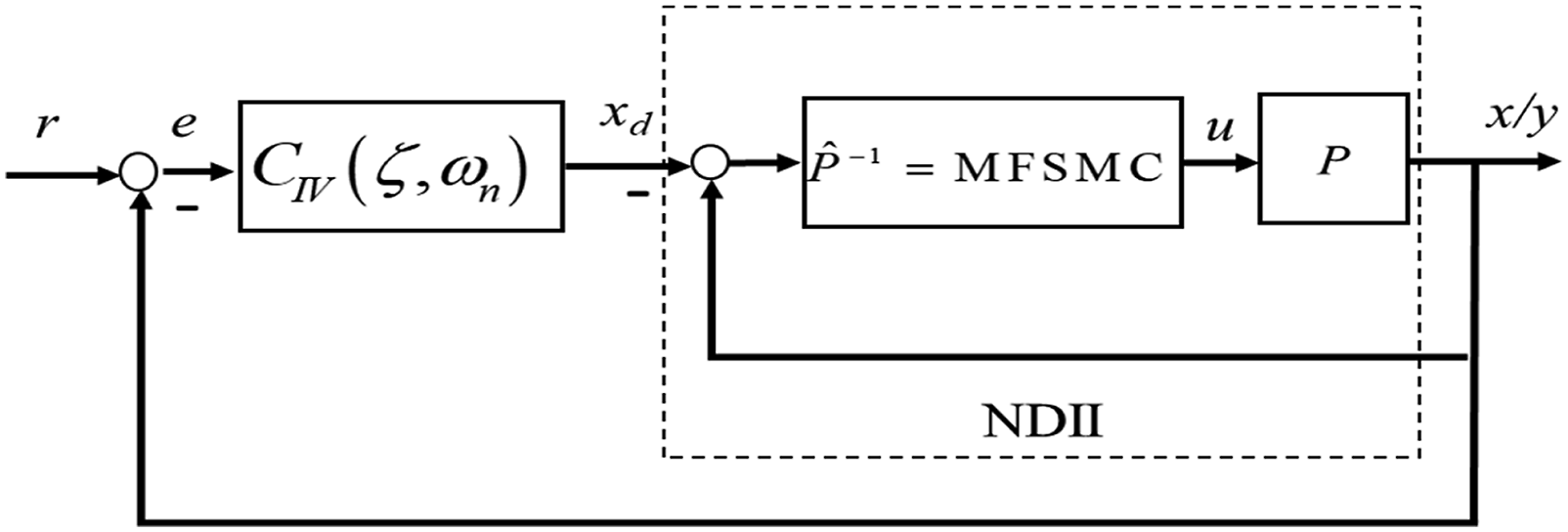
Specification phase: 1) Plant priori information, including assumptions of the plant being observable, controllable, stabilisable, and BIBO, and the plant, except the dynamic order, is treated as a whole uncertainty in the study. Therefore, this is a type of mode-free control system design. 2) The control goals for the tracking requirement include (1) the NDII with
Design phase: 1) Design the two dynamic inverters (inner loop/NDII, outer loop tracking performance specification) separately/independently to generate the control input to drive the system with the specified requests. 2) Determine the desired state vector for the NDII from the state space equation realisation from 3) Connect the components with U-control configuration 4) Assume the outputs and their derivatives are available for feedback control. Otherwise, observers can be used to estimate the signals.
4.1. Properties of model-free robust decentralised control
4.1.1. Stability
Assuming Lyapunov stability holds in the inner loop, then the outer loop (i.e. whole system) stability is Hurwitz stable. This can be briefly proved, by considering the whole system transfer function matrix
4.1.2. Robustness against internal uncertainty
It has much greater robustness compared with model-based approaches, including online-model approaches. This is because those using nominal model to determine the equivalent control in SMC deal with percentage uncertainty with
4.1.3. Robustness against external disturbance
The double loops have robustness against disturbances, SMC in the inner loop has its own inherent robustness against disturbances, and the invariant controller in the outer loop can be designed to deal with disturbances. Take a level disturbance
5. Case studies
5.1. Description of the dynamic plants
Two two-input-two-output (TITO) model-unknown (models are only used for simulations, rather than designing the corresponding control systems) nonlinear dynamic plants are selected for the bench test of the designed decentralised control systems.
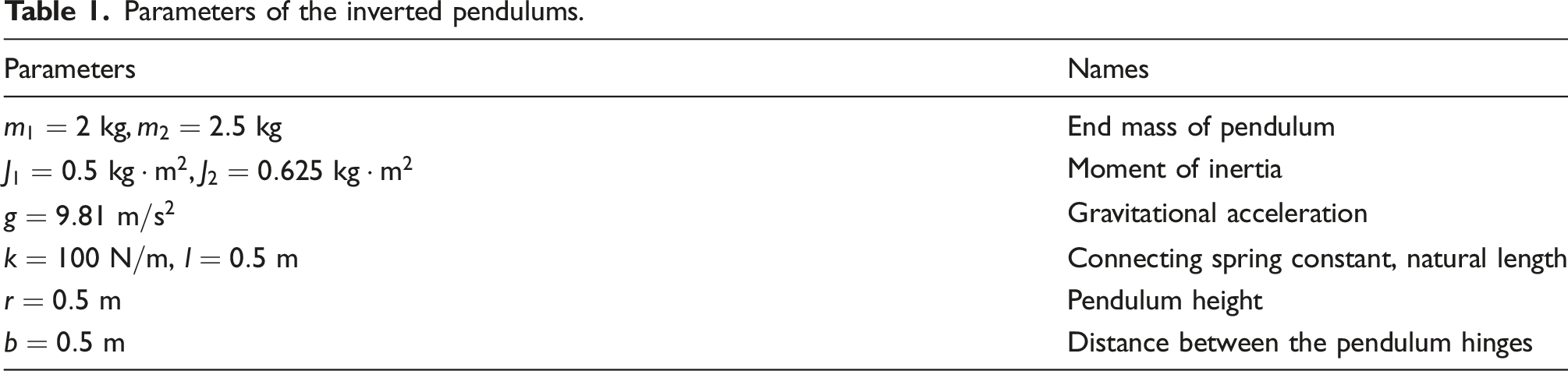
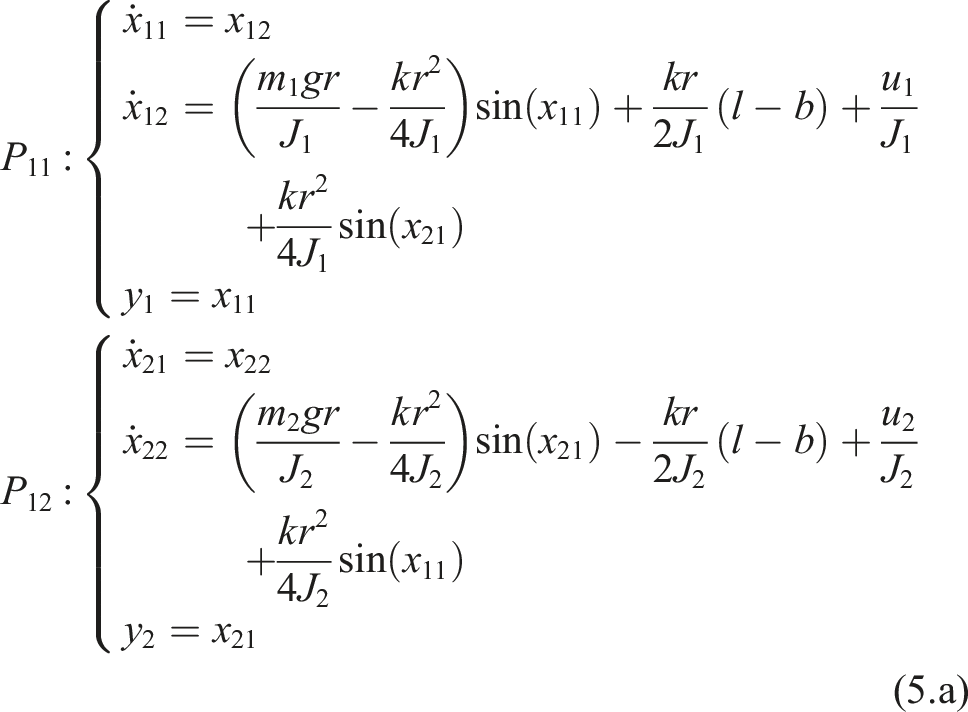
5.1.1. Coupled inverted pendulum system
As shown in Figure 3, two inverted pendulums connected by a spring, each is controlled by a torque ( Coupled inverted pendulums. Parameters of the inverted pendulums.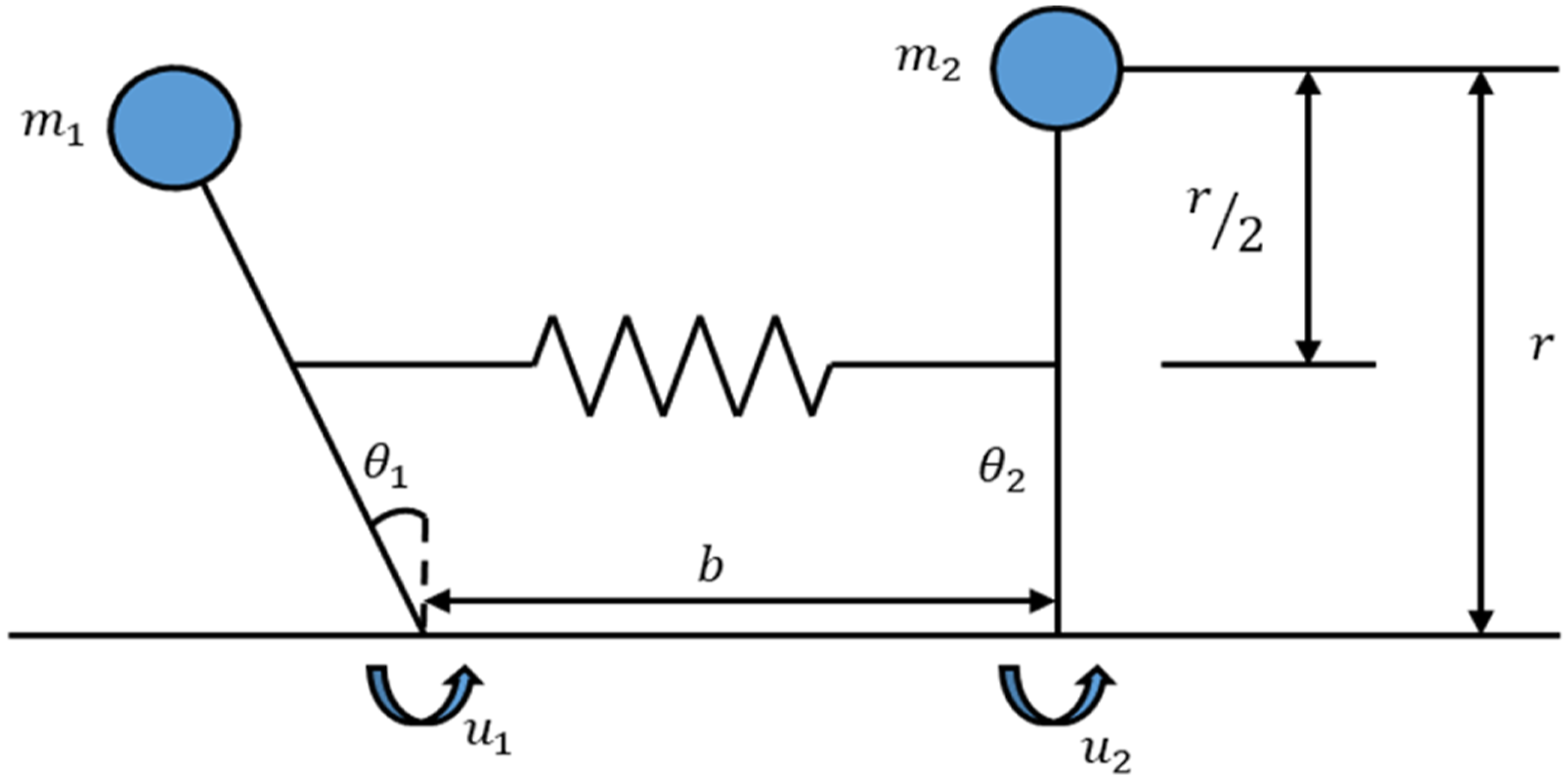
5.1.2. Coupled non-affine nonlinear dynamic plan
This plant is described below,
Inspect the input-output model of (5.b), the first line of the system is a non-affine nonlinear dynamic sub-plant, and the second line is an expanded Van der Pol equation with nonlinear control input, the interactions/couplings are the two outputs appearing in both lines of the equations.
5.2. Model-free robust decentralised control system design
The aim of the case study is the conducting of computational experiments, that is, Simulink-platformed demonstrations of the proposed MFRDC and analysis of numerically generated plots in relation to those theoretically derived/proved. There are several objectives to enable the case study to demonstrate the MFRDC of the interconnected nonlinear dynamic systems. 1) The specified system performance is well achieved for tracking control, that is, 2) Generality of the MFRDC framework in the control system design, including the tests of the functional components of model-free NDII, U-control configuration with NDII, and invariant controller (IC). Further this once-off design is applicable to both cases. 3) Test robustness with unknown plant and external disturbance, and even further switched unknown nonlinear dynamics.
Assume the dynamic order of each subsystem known, the state/output derivatives are measurable, otherwise some types of observers can be taken in to estimate (Fareh et al. 2021).
To achieve the above objectives, set up the simulation platform with 1) For both case studies, setup two references with 2) Assign the error vector 3) Design of the NDII, assign the SMC gains, by a few of trial-and-error tunings, for both systems 4) Design of the invariant controller, assign two second order IC as

5.3. Analysis of simulation demonstrations
5.3.1. Analysis and comparison of control system 1
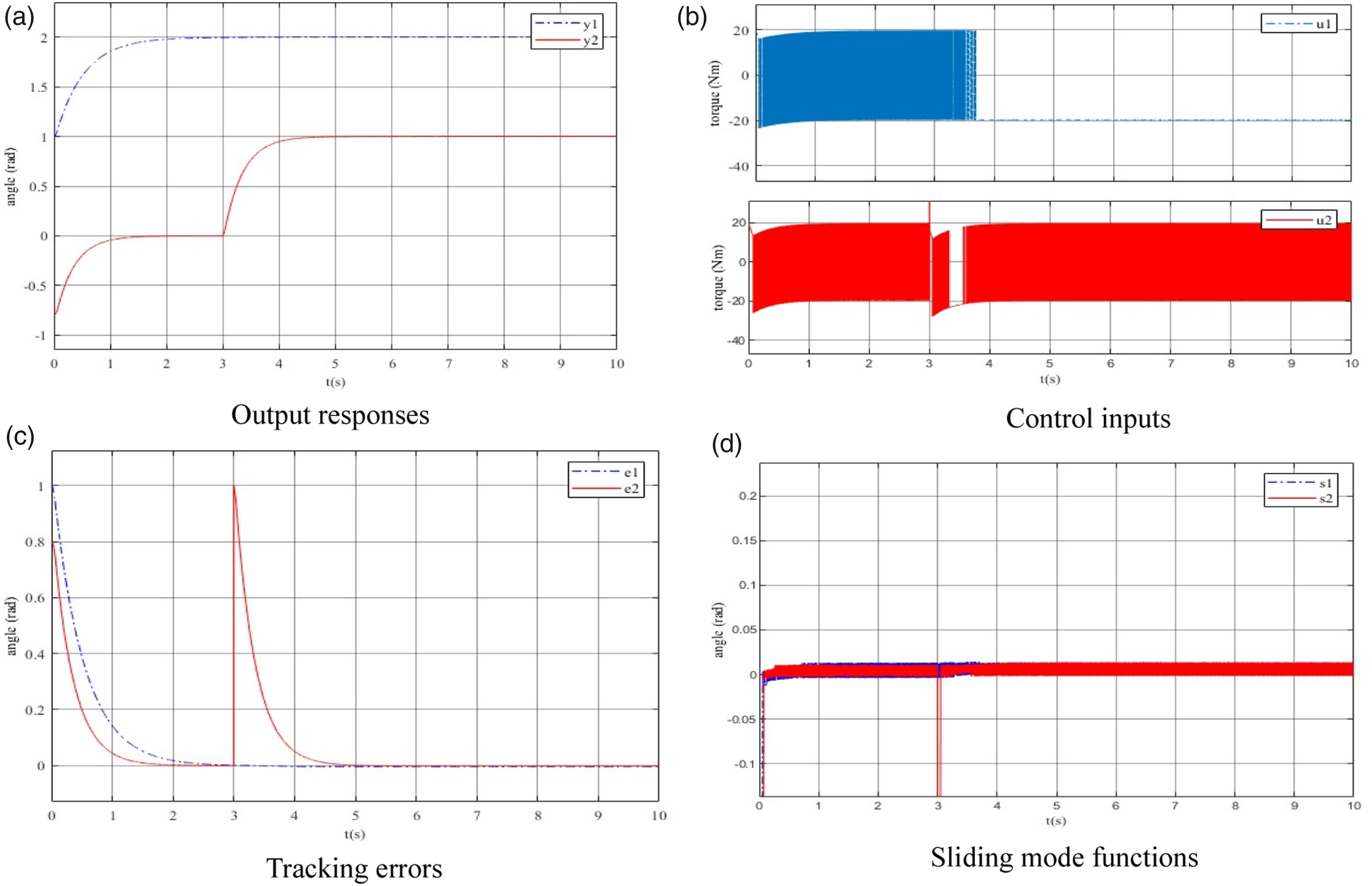
Figure 4 shows the simulated results with the proposed MFRDC/U-control and Figure 5 shows the plots generate by a well-known mode-based SMC (Ding et al. 2021). A summary report is presented below Case1 – MFRDC of coupled inverted pendulums. (a) Output responses, (b) control inputs, (c) tracking errors, and (d) sliding mode functions. Case1 – Model-based SMC of coupled inverted pendulums (Ding et al. 2021). (a) Output responses, (b) control inputs. (c) tracking errors, and (d) sliding mode functions. 1) The insight of the MFRDC composed of the NDII and the U-control work effectively to achieve the control system objectives 1, 2, and 3. 2) The transient response and the steady state errors are accommodated well with the specified control system performance without involving the plant model (treated as whole uncertainty) in design. 3) The NDII clearly shows the conciseness and robustness of the nonlinear dynamic inversion and decoupling, which is the kernel foundation for achieving the system tracking specifications. This gives a far-reaching view that without a model, dynamic inversion is still achievable and robustly computational effective, it is noted that the model-free dynamic inversion needs to be implemented in closed loop configuration. There is no chattering effect and large control inputs observed. 4) Compare the U-control with the recently published representative model-based SMC (Ding et al. 2021) on the same inverted pendulum, which the simulation plots are shown in Figure 5. To obtain the similar results, the conventional model-based SMC design requires (1) the nominal isolated subsystem models to single out uncertainty models, (2) matched uncertainty known, (3) all uncertainty bounds known, (4) large control output oscillation to achieve the specified system outputs, (5) the model-based SMC design need more design parameters for running the simulation platform, and (6) if system changed, the above requests must be updated accordingly. There are two comparative merits with the model-based SMC, (1) it performs better in accommodating initial states from comparing plots (a) in Figures 4 and 5, and (2) the terminal SMC provides a good reference for expanding the U-control into finite time SMC in the following studies. 5) For adaptive fixed-time neural network control (AFTNNC) (Li et al., 2021), the design requires (1) neural network assignment (nodes, layers, etc.) and data-based iteration to estimate uncertainties, (2) fixed-time lowpass filter, (3) an adaptive backstepping routine to cope with unknown system in fixed-time settings, and (4) again the model-based approach need repeat the above procedures once a system model changed. Obviously, the new design approach need uncertainty known or estimated in advance in control execution, plus the complex routines in the control system configurations model by model. One more negative point on the AFTNNC is that it is not practical for this case application as its control input require large torques. It should be noted that due to the length of the paper, the AFTNNC configuration is shown in Figure 8 and the simulation plots are shown in Figure 9 in appendix. 6) In summary, the compared approaches require extra effort and expertise (e.g. requiring the uncertainty bound known or to be estimated), which are unnecessary with the U-control, to deal with uncertainties in the control system designs. It should be noted that the compared two approaches do not need decoupling the dynamic plant, which could be significant challenge to model-based control system design. However, U-control does not suffer such technical complexity as this is naturally embedded in the model-free NDII.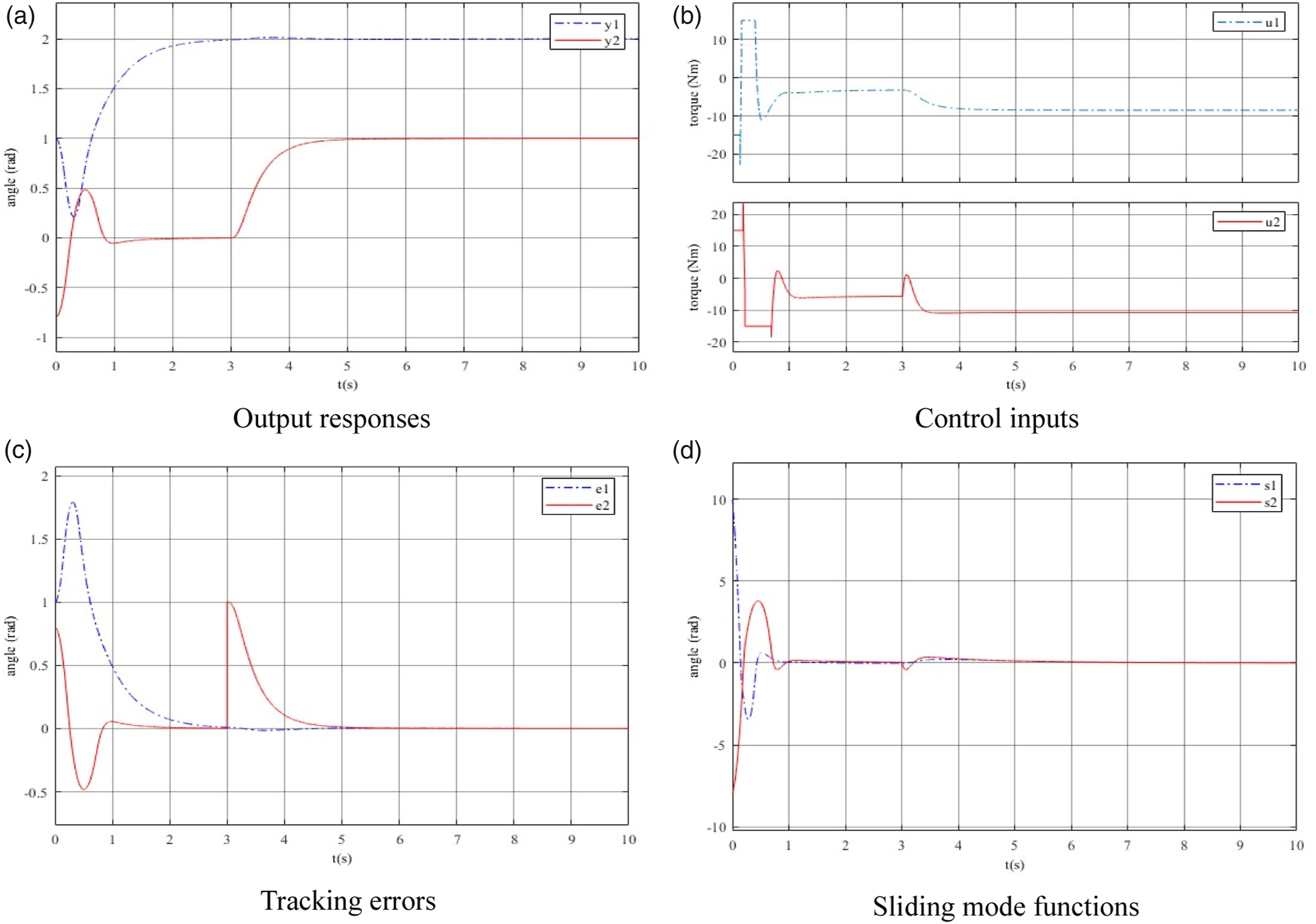
5.3.2. Analysis of control system 2
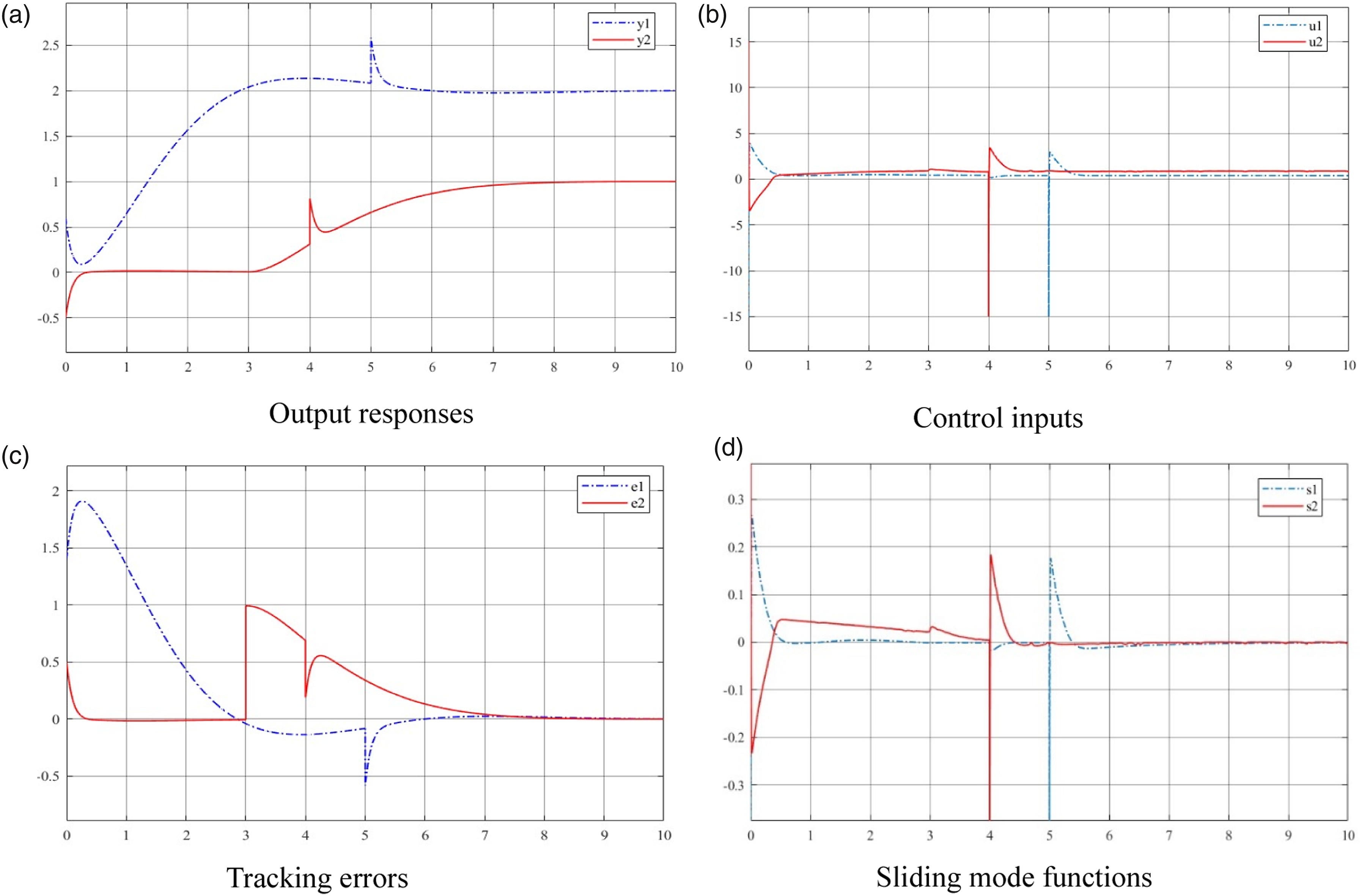
Figures 6 and 7 show the simulated results. Because this is a numerical example, there are no physical units in the horizontal and vertical coordinates. A summary report is presented below Case2 – MFRDC of coupled non-affine nonlinear dynamics. (a) Output responses, (b) control inputs, (c) tracking errors, and (d) sliding mode functions. Case2 – MFRDC of coupled non-affine nonlinear dynamics with non-zero initial states and disturbances. (a) Output responses, (b) control inputs, (c) tracking errors, and (d) sliding mode functions. 1) The specified performances, as shown in system one, are demonstrated, which has no need to be repeated. The MFRDC is applicable to non-affine nonlinear dynamic plants without extra effort in configuration and design, which the output response performance is effectively specified by assigning the damping ratio and the undamped natural frequency, without involving any plant. 2) Figure 9 shows the tests on the second example with (1) non-zero initial states ( 3) The who simulation clearly demonstrates the merits of the model-free method in general control system design (because of no request on the system/model structures and parameters) and stronger robustness against model uncertainties (because of the underlaying plants treated as whole uncertainty), which the two examples can be considered as one system with two separate dynamics, that is, Case 1 takes on in time duration of 0–10 and the Case 2 is switched on from 10 and kept till time instance 20. 4) For both cases, the outer loop of the invariant controller favourably plays the roles 1) specifying the whole control system output dynamic/static performance, suppressing the external constant disturbance, and 3) providing the desired state vector for nonlinear dynamic, interaction inversion (NDII) in the inner loop.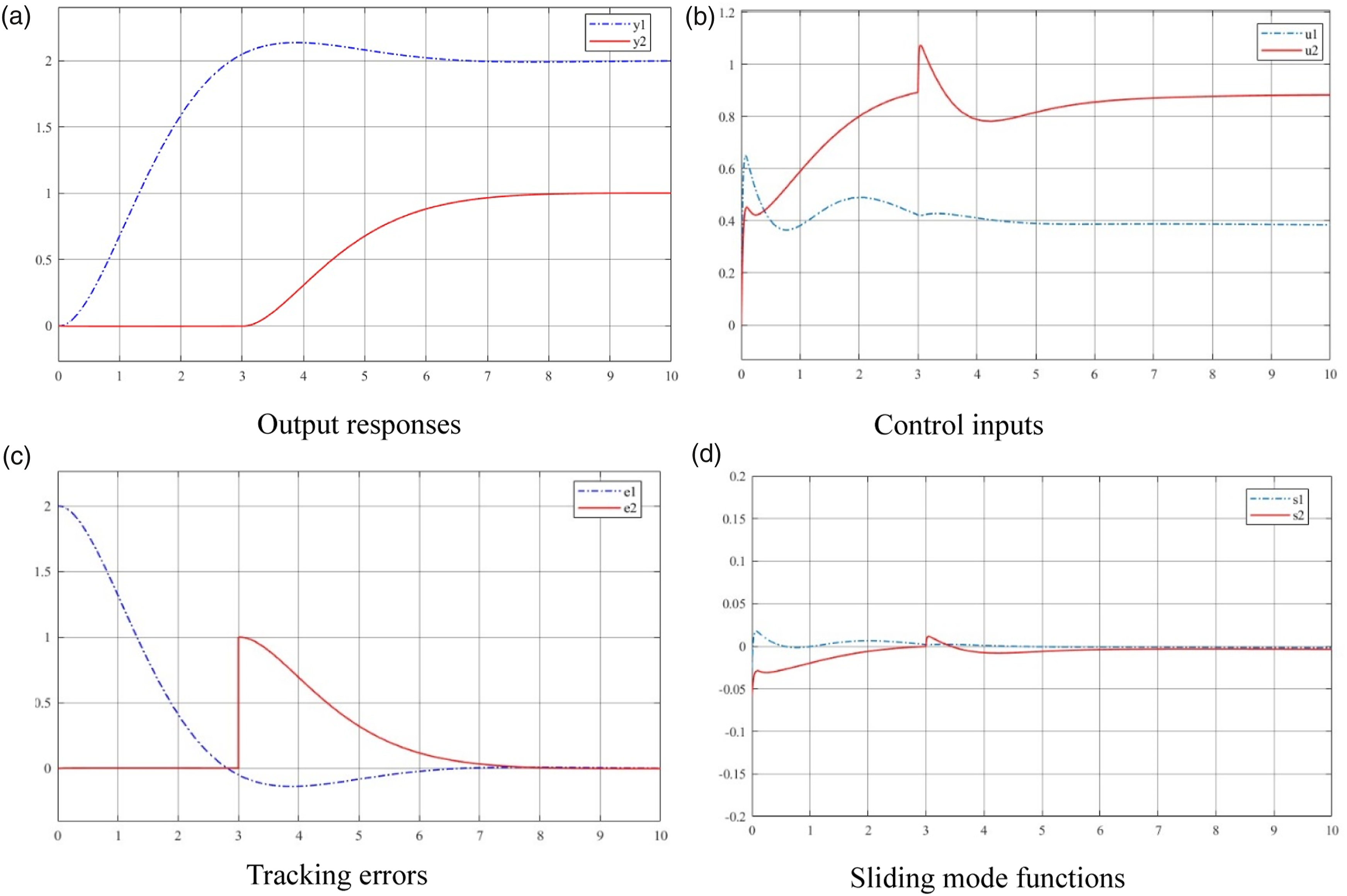
6. Conclusions
The presented method could be expanded to provide solutions for the other related issues in MIMO control system design, such as under-actuated control, over-actuated control, and particularly decoupling control for plants with additional input-output coupling, beyond just the output dynamic coupling encountered in this study. In addition, (1) the model-free control methodology has roots in bionics, which effectively uses the error and the error derivatives, in conjunction with SMC and PID heuristic behaviour. This merit is comparable to mode-free adaptive control, which would still need online model updating with measured errors and the model variables, and the other data-driven learning control approaches requiring online model estimation, (2) the U-control configuration represents a fundamental insight – the control system design is a backward procedure to invert a system with prespecified requests, U-control takes an inverting procedure in
Footnotes
Acknowledgements
The authors would like to express their gratitude to the editors and the anonymous reviewers for their helpful comments and constructive suggestions regarding the revision of the paper. The second author is grateful to the partial PhD studentship from the Engineering Modelling and Simulation Research Group of the University of the West of England, UK. The authors greatly appreciate Dr Steve Wright for proof-reading the revised draft.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Appendix
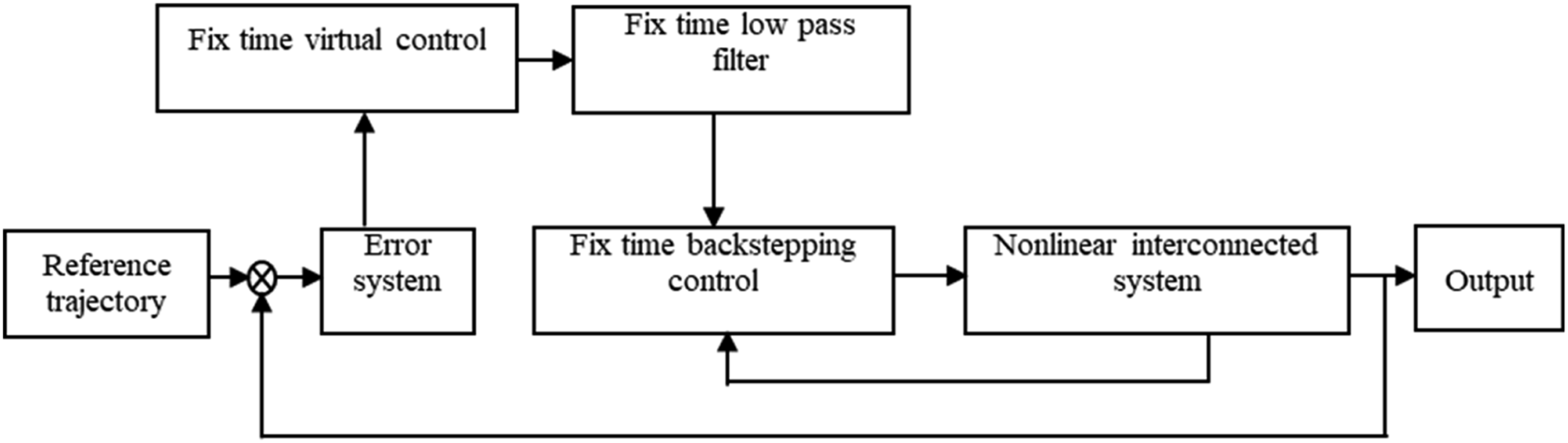
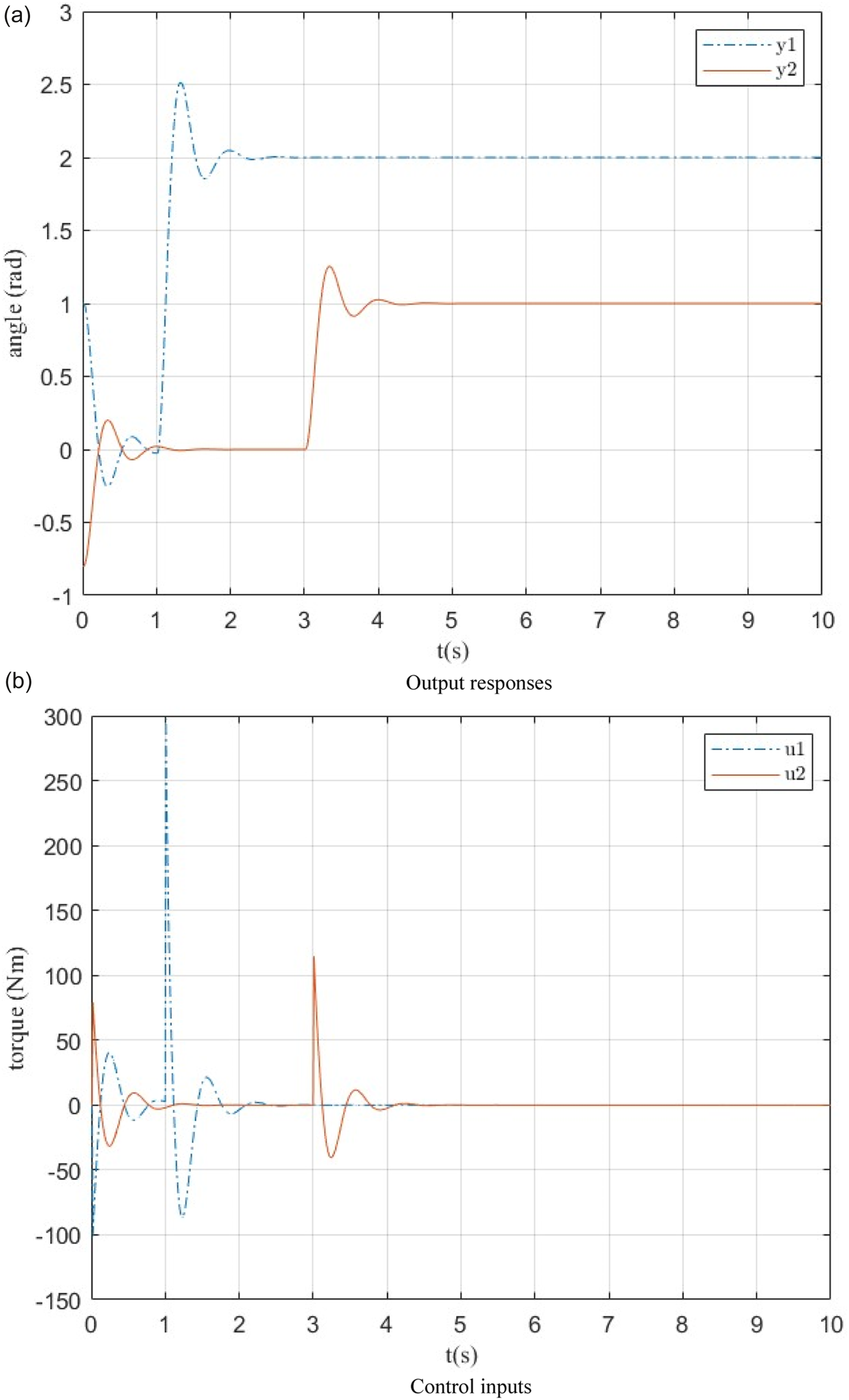
Simulation for Case 1 by adaptive fixed-time neural network tracking control of nonlinear interconnected systems (Li et al., 2021). The adaptive control system. Case1 – Adaptive control of coupled inverted pendulums (Li et al., 2021). (a) Output responses and (b) control inputs.