
Abstract
The article proposes a model-free sliding mode prescribed performance control method for robotic manipulator. For accelerating the errors converging rate as well as bringing down the real-time control torque, an error-driven nonsingular fast terminal sliding mode is employed in this control method. Besides, a modified power reaching law is newly designed, which is able to offer better chattering elimination performance than traditional power reaching law. To solve the problem that the controller’s performance highly relies on the accuracy of robotic model, a model-free control idea is introduced where an ultra-local model is established and the estimation of time delay is used to approximate the unknown part of the ultra-local model. Considering the transient performance is a significant element that effects the using security and system stability, the technique of prescribed performance control is introduced to limit the state errors in a prescribed region. The closed-loop stability proof of the whole system is achieved according to Lyapunov’s stability theorem. The proposed controller’s superiority and feasibility compared with other controllers are demonstrated by numerical simulations.
Introduction
In the last few years, the extensive employment of robotic manipulators has led to an increasing demand for its fast response and high precision tracking in practical applications. 1 –3 To continuously improve the performance of tracking control, researchers have proposed various control schemes, including back-stepping control, 4,5 adaptive control, 6,7 sliding mode control (SMC), 8,9 and intelligent control. 10 –12 As we all know that the control of sliding mode is a classic control approach which has the advantage of well-established, good transient performance and robustness to unknown disturbances. Due to its robustness to disturbances, it has arisen widespread interests and exploration. 13,14 However, it is worth noting that linear SMC cannot achieve defined finite-time convergence and has slow response when facing uncertainties. To acquire finite-time convergence and enhance converging performance, researchers innovate a terminal sliding mode (TSM). 15 –17 Nevertheless, TSM fails to offer fast converging speed. As a result, fast terminal sliding mode (FTSM) 18,19 is invented to make up this drawback. FTSM control combines the advantages of finite-time convergence as well as high speed of convergence, yet yield a new singularity problem. Moreover, the tracking accuracy achieved by the above algorithm depends on the selection of the sliding surface’s gains. A gain with larger numerical value will achieve good tracking accuracy but also requires a larger driving torque. 20 Therefore, it is essential to consider the choice of method for sliding surface gains so that it can be adjusted according to the tracking error values and bring down the driving torques. 21 Besides, the chattering phenomenon is an unavoidable problem that traps SMC for a long time. To eliminate chattering and build up the system’s response speed, domestic and foreign scholars have proposed different sliding mode reaching law to suppress chattering. Zou et al. 22 design an exponential reaching law with state variables, which can speed up the arrival at the sliding mode surface by exponential and power terms, but the accuracy of the system deteriorates when the load perturbation is too large. Mo et al. 23 propose a fuzzy exponential reaching law to redefine the switching function and attenuate the system chattering based on fuzzy rules, but this approach exists only in theoretical studies. Kang et al. 24 adopt a sideband bandwidth reaching law and suppress the system chattering effectively by introducing the inverse hyperbolic sine function. However, the system response becomes slower and the tracking accuracy deteriorates when the system is subjected to large parameter changes.
In addition, steady-state and transient performance analysis of robotic manipulator systems is a challenging problem, especially when the system is affected by actuator failures and uncertainties. Although the controllers developed in the existing literature on SMC may be consistent and eventually bounded, all convergence regions of the closed-loop signals are dominated by several unknown limited terms, resulting in the current results of the robotic manipulator system lack of a valid mechanism to bring the tracking error in both steady-state and transient phases to a predetermined specifications. 20,25,26 Prescribed performance control (PPC) allows to predesign the steady-state and transient performance and to limit the errors to a prescribed region by transforming the initial bounded errors to unbounded errors using error transformation functions, which has attracted lots of awareness in the nonlinear system control. 27,28 By introducing a performance function with prespecified performance, the all-state constrained preconditioned performance tracking controller designed by Zong et al. 29,30 guarantees the tracking errors converge in the specified time.
The traditional model-based control methods usually require an exact system model. 31 –33 However, robotic manipulator is a complicated dynamic system containing uncertainties and most of them are impossible to be modeled. Techniques that are able to reduce the dependence on the model parameters are continuously explored. Zhang et al. 34,35 take use of multilayer neural network to estimate the un-modeled part of the system. Qureshi et al. 36,37 employ fuzzy logic successfully decreasing the requirement of model precision during controller design. Yet both of them have a complex tuning process in the experiment and still need some preknowledges about the model. Besides, it takes long time that the approximate values converge to the actual real values during weight training by estimation rules. Model-free control method 38,39 where controlled system only contains the input term and unknown term is gradually introduced to solve aforementioned drawbacks.
Enlightened by the aforementioned discussions, this article proposes a model-free sliding mode prescribed performance controller (MFSMPPC). Unlike Lu et al. 15 –17 that count on TSM and can only achieve finite-time convergence, we put forward an error-driven nonsingular FTSM that can improve the converging speed, avoid singularity, and reduce driving torque. Unlike Zou et al. 22 –24 that employ reaching laws eliminate chattering while impair the robustness as well as accuracy of the system, we innovate a novel reaching law which is modified on account of the traditional power reaching law (PRL). It can not only shorten reaching phase but also better solve chattering problem. Unlike Zaare et al. 20,25,26 that only rely on SMC to keep consistent and eventually bounded, we add PPC in SMC to promote steady-state and transient performance of the system. Unlike Zhou et al. 31 –33 whose controller highly depends on the model parameters, we adopt model-free control method to eliminate the dependency on model parameters during the control design process as well as decrease the complexity and difficulty in controller design.
In general, the primary contributions of our proposed control method are listed as below: Newly design an error-driven NFTSM to make the control torque smaller than other similar controller and achieve fast error convergence in the meantime. Introduce a modified power reaching law (MPRL) which provides faster sliding mode reaching speed and better chattering elimination performance than traditional one. By using the PPC, the system’s state errors are all along confined in an artificially set region, which improves the transient performance as well as using security of the controller. By means of the model-free control method, the controller can be designed requiring no information of the model parameters of robotic manipulator in advance. As a result, the complexity and difficulty during control design process is brought down.
The remaining parts of this article are organized as below. Robotic manipulators’ dynamic model is illustrated in the second section. The third section presents MFSMPPC design process. In the fourth section, the stability of the closed-loop system is proved based on Lyapunov’s theory. In the fifth section, the validity of the proposed controller is verified through simulation experiment based on two-link robot manipulator. The sixth section summarizes the whole article and puts forward the direction of further research.
Problem statement and preliminaries
Model of robotic manipulator
Considering an n links of freedom robotic manipulator whose Lagrange dynamics form is formulated as

where
Note that the robotic dynamic model (1) has the properties listed as below.
Property 1
The matrix

where
Property 2
The matrix combination

where
To achieve a robust tracking, some assumptions are listed.
Assumption 1
The system model (1) suffered external disturbances
Lemma 1 (Young’s Inequality 42 )
For

where
Lemma 2
For any given positive number, the inequality holds as follows 43

where
Lemma 3
For positive definite continuous functions


Ultra-local model of robotic manipulator
For nonlinear physical systems, the ultra-local model is formulated as

where
On the basis of the dynamic model of robotic manipulator (1) and the model-free control theory, we can obtain the ultra-local model of the robotic manipulator from the theory.

where M 0 denotes a positive constant diagonal matrix.
Compare to equation (5), we can see that

where T represents a particularly short time delay constant, which is usually specified as a sample time.
Therefore, we have

The time delay estimation error is delimited 45,46 and is specified as

To guarantee the boundness of the time delay estimation error, based on Property 2, we have to make the following inequality fulfill

In denotes the unit matrix of nth order.
Introduction of PPC
The desired trajectory required to track is qd . We define the tracking error as

To enhance the systematic steady-state and transient performance, we adopt PPC. First, we specify that the tracking error must be constrained in the following range

where

where the designed parameters satisfy
PPC needs to employ the following conversion equation to transform the following restricted error



According to equation (14), we have

and

With the above definitions and error transformations, we can achieve the performance constraints through the appropriate selection of parameters. Take the derivative of equation (15), we obtain

with


Take the derivative of equation (17) further, we have

Error-driven NFTSM and novel reaching law
To guarantee finite time and fast convergence of the tracking error and keep the drive torque from being too high, we propose error-driven nonsingular FTSM

where


Remark 1
By means of the introduction of piecewise function
To relieve the contradiction between the reaching velocity and chattering phenomenon in the traditional PRL, based on the traditional PRL, we introduce a piecewise function and an additional high PRL to construct a novel reaching law

where
Remark 2
In comparison to the traditional PRL, the MPRL introduces an additional PRL
The traditional PRL is formulated as

where
We make a preliminary comparison of reaching speed between MPRL and traditional PRL in Figure 1.

Reaching speed comparison of the two reaching law.
Remark 3
Figure 1 is plotted under the condition of
Control law design and stability analysis
Control law design
Differentiate equation (19), we acquire

where


Taking equations (20), (18), (11), and (6) into equation (21), we can acquire the model-based equivalent control law

where

Using the aforementioned model-free control method (9), we can acquire the final equivalent control law

Define
We design the robust control term as

where

where
Therefore, the MFSMPPC is designed as

The whole process of the MFSMPPC is presented in Figure 2.

Block diagram of MFSMPPC. MFSMPPC: model-free sliding mode prescribed performance controller.
Remark 4
During the control design process, the proposed controller needs to use angular position and velocity signals of each joint. However, the joints’ angular position and velocity signals of the robotic manipulator are not directly available in practical applications. Therefore, we come up with a second-order uniform robust exact differentiator to estimate angular position and velocity signals of each joint 47
where
System stability analysis
We choose the Lyapunov function candidate as below

where
Take derivative for equation (27), we have

Taking equations (21), (18), (11), (6) into equation (28), we acquire

Take control law (26) into equation (29), we have

Using Lemma 3 in equation (30), we obtain

Using adaptive update law (25), equation (31) can be transformed into

Using Lemma 1, we have

According to the property of

where



Structure of the two-link robotic manipulator.
Simulation studies
This section will verify the superiorities of the proposed MFSMPPC through the following several comparisons. (I) Compare with TSM in TSM controller (TSMC), 16 whether the error-driven NFTSM in MFSMPPC can offer faster converging speed and lower driving torque. (II) Compare with the traditional PRL of adaptive integral sliding mode control (AISMC), 48 whether the novel reaching law we proposed can better shorten the reaching time and eliminate chattering phenomenon. (III) In comparison to the adaptive nonsingular sliding mode control (ANSMC), 25 whether the new added PPC can enhance the robotic manipulator’s steady-state and transient performance. Without loss of generality, a robotic manipulator with two links, as displayed in Figure 2, is used for the following simulation. The dynamic of the manipulator in equation (1) by Lagrangian equation is represented as

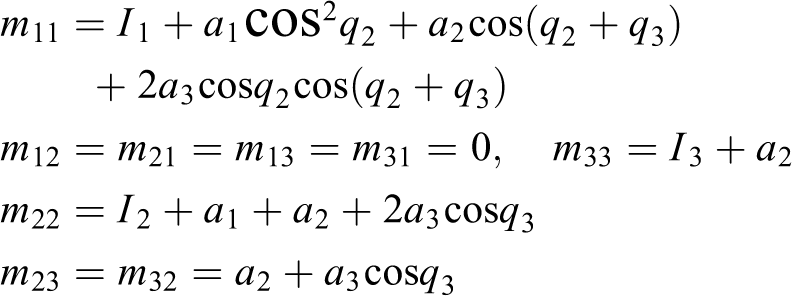


where
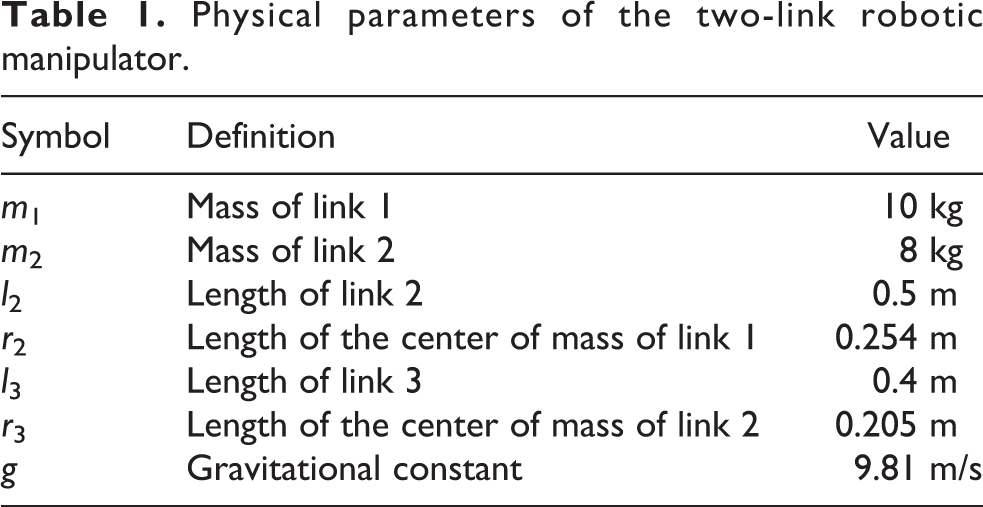
Table 1 lists the basic parameters of the robotic manipulator for numerical simulation.
Physical parameters of the two-link robotic manipulator.
Initial conditions of simulations are given as
To better reflect the actual situation, we adopt LuGre friction model in

where ψ denotes the average offset of the brush moving on the surface of contact;

The rest of parameters in LuGre friction model is given in Table 1.
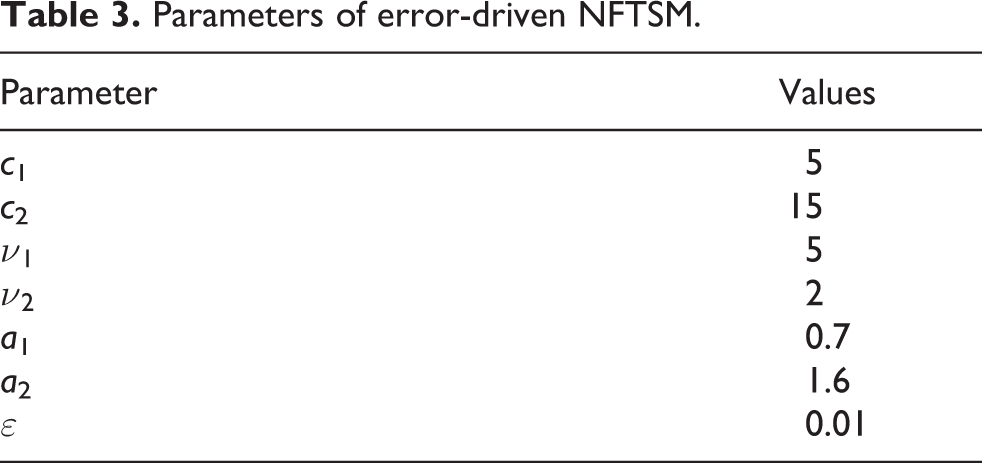
Table 2 shows the parameters of error-driven NFTSM. Table 3 shows the parameters of the proposed novel reaching law. Table 4 shows the parameters of PPC. Table 5 shows the parameters of the exact differentiator.
Parameters of LuGre friction model.

Parameters of error-driven NFTSM.
Parameters of the reaching law.

Parameters of PPC.

PPC: prescribed performance control.
Parameters of differentiator.

The parameters of adaptive law are chosen as
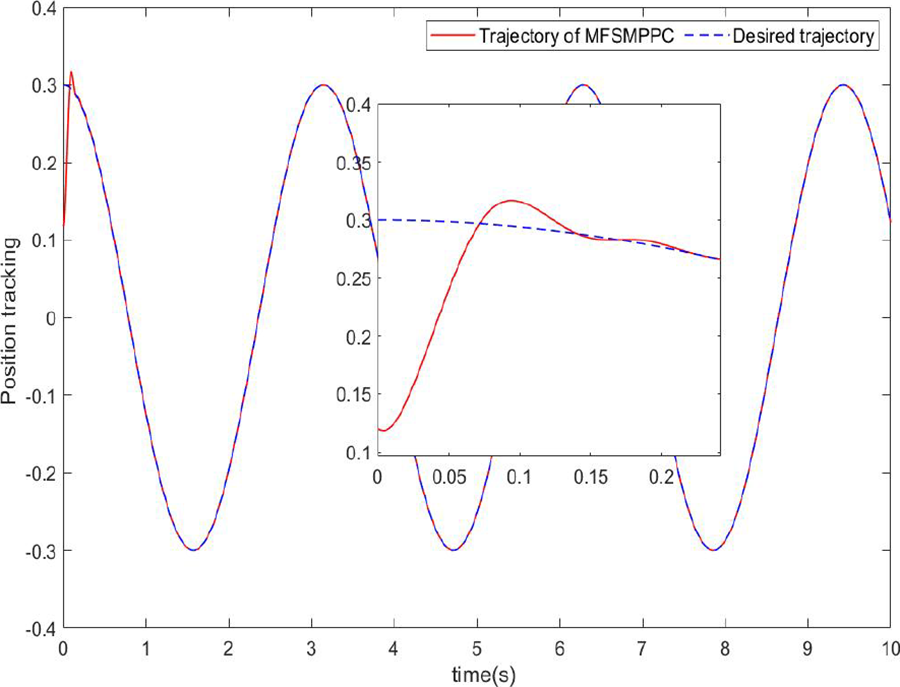
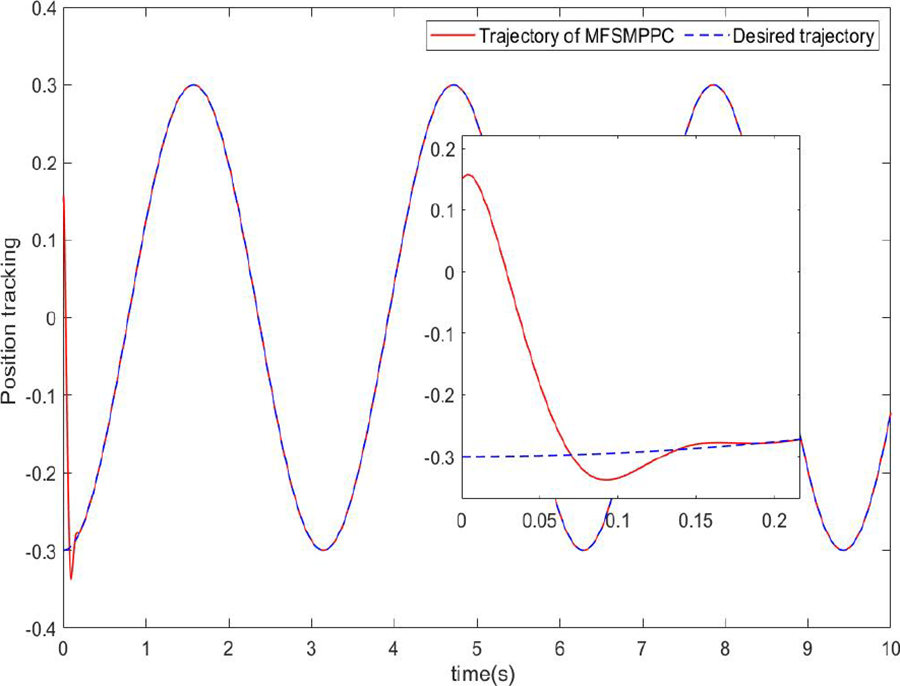
Figures 4 to 6 display the three joints’ position tracking results.

Result of position tracking from joint 1.
Result of position tracking from joint 2.
Result of position tracking from joint 3.
Firstly, according to Figures 7
to 9 we can find that MFSMPPC offers smaller steady-state errors than TSMC. This means that error-driven NFTSM has an advantage over TSMC in terms of error convergence. Secondly, according to Figures 10
to 12, it is apparent that the driving torques of MFSMPPC in joints 1, 2, 3 are lower than TSMC all the time, which is able to save energy in real application. This is attributed to the error-driven function

Comparison of tracking errors from joint 1 between TSMC and MFSMPPC. TSMC: terminal sliding mode controller; MFSMPPC: model-free sliding mode prescribed performance controller.

Comparison of tracking errors from joint 2 between TSMC and MFSMPPC. TSMC: terminal sliding mode controller; MFSMPPC: model-free sliding mode prescribed performance controller.
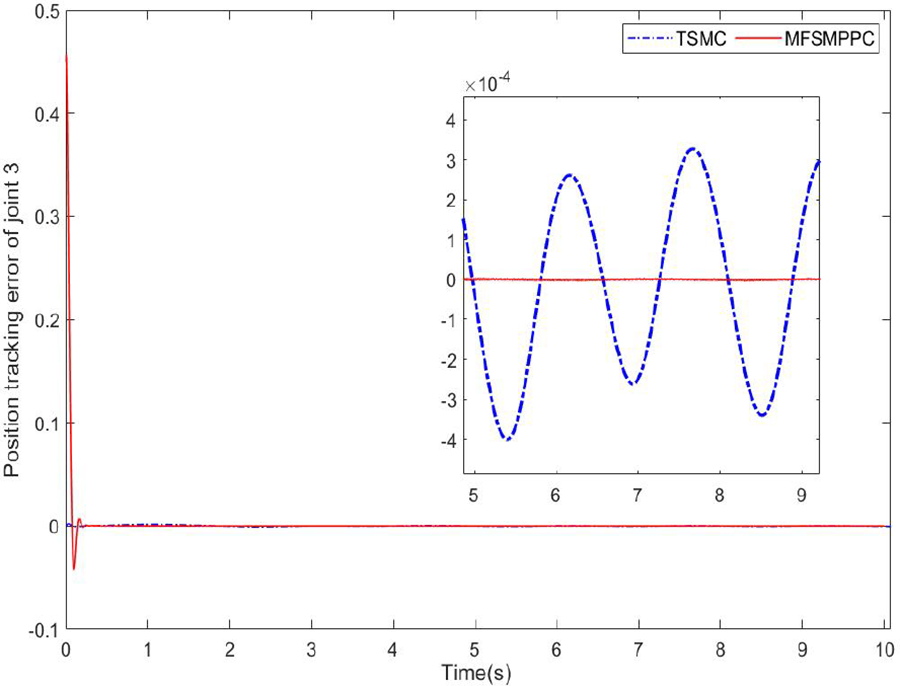
Comparison of tracking errors from joint 3 between TSMC and MFSMPPC. TSMC: terminal sliding mode controller; MFSMPPC: model-free sliding mode prescribed performance controller.

Control torque from joint 1 affected by varying sliding surfaces.

Control torque from joint 2 affected by varying sliding surfaces.

Control torque from joint 3 affected by varying sliding surfaces.
The reduction of maximal torque in three joints.

MFSMPPC: model-free sliding mode prescribed performance controller; TSMC: terminal sliding mode controller.
Figures 13 to 15 display the simulation results. From the three pictures’ enlarged image, we can see that MFSMPPC shorter convergence time than AISMC. The specific convergence time of the two methods in three joints are marked in these pictures. And the specific improvement of convergence times are shown in Table 8. From the results of the data, the convergence time of MFSMPCC was significantly improved in all three joints. The smallest increase rate is more than a third. The average percentage improvement is 50.3%. Besides, according to the enlarged image, chattering phenomenon is also significantly reduced by MFSMPPC. The superiorities of our proposed reaching law compared to the traditional PRL are demonstrated.
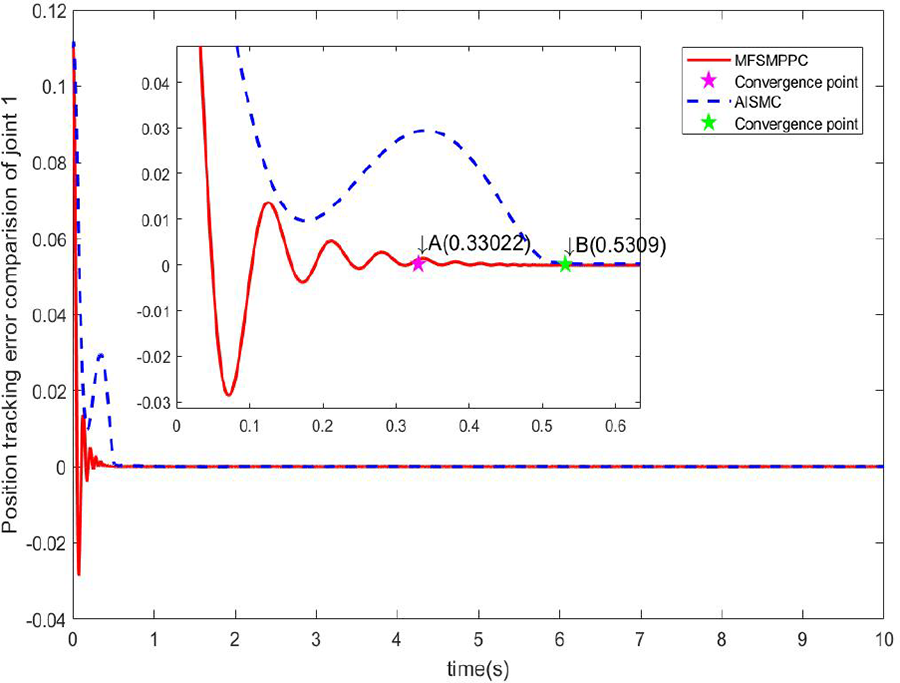
Comparison of tracking errors from joint 1 between AISMC and MFSMPPC. AISMC: adaptive integral sliding mode control; MFSMPPC: model-free sliding mode prescribed performance controller.
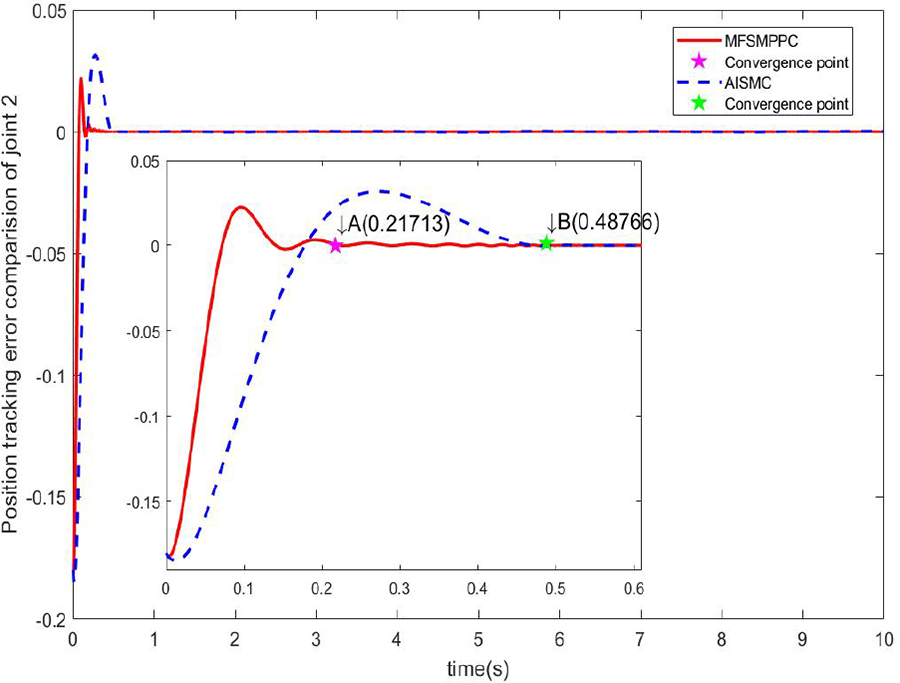
Comparison of tracking errors from joint 2 between AISMC and MFSMPPC. AISMC: adaptive integral sliding mode control; MFSMPPC: model-free sliding mode prescribed performance controller.
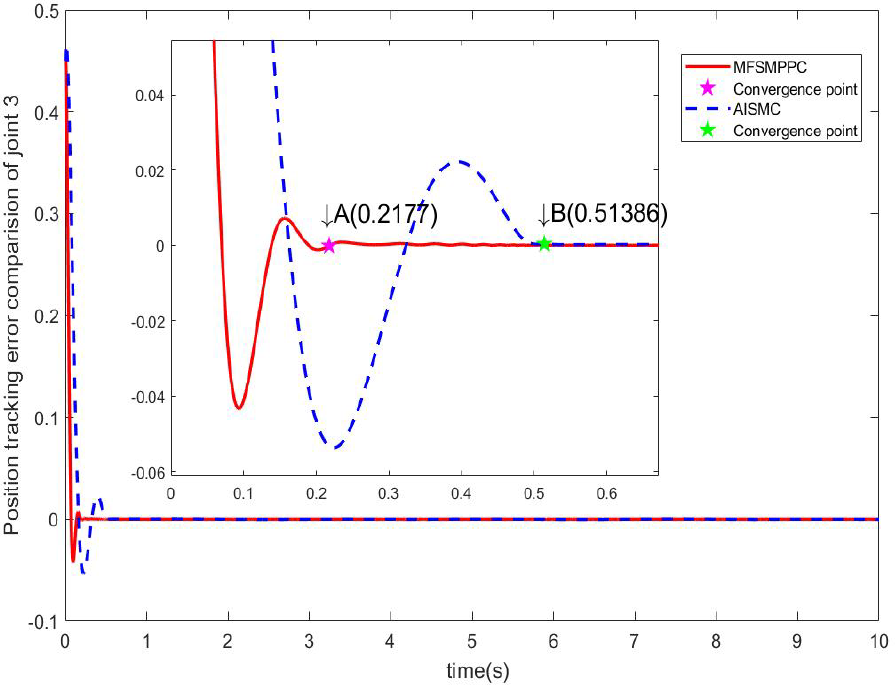
Comparison of tracking errors from joint 3 between AISMC and MFSMPPC. AISMC: adaptive integral sliding mode control; MFSMPPC: model-free sliding mode prescribed performance controller.
Error convergence time of different methods.

MFSMPPC: model-free sliding mode prescribed performance controller; AISMC: adaptive integral sliding mode control.
First of all, in Figure 16, we can see that the position tracking errors from joints 1, 2, 3 are successfully limited to our prescribed range from the beginning to the end. In comparison, the situation at ANSMC is not so favorable. In Figures 17 to 19, there are significant periodic error jumps which values are much bigger than MFSMPPC’s. This fully reflects the capability and contribution of PPC of MFSMPPC. As ANSMC relies only on SMC to maintain the robustness of the system, although it is able to achieve consistent and eventually bounded, its transient state cannot be guaranteed. Based on SMC, MFSMPPC adds an additional PPC in it and dramatically improved transient performance.

Transient control performance of PPC. PPC: prescribed performance control.
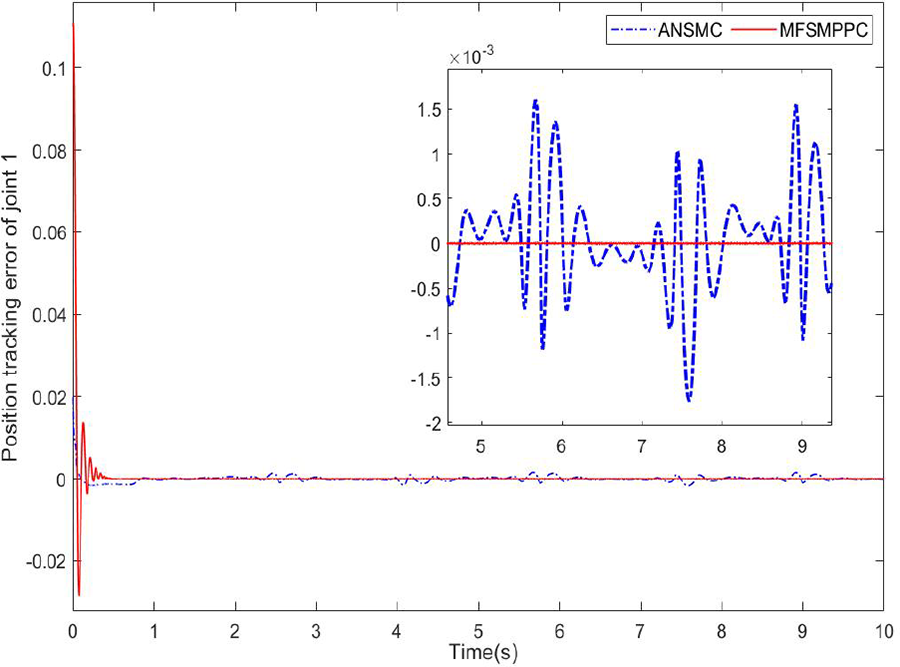
Comparison of tracking errors from joint 1 between ANSMC and MFSMPPC. ANSMC: adaptive nonsingular sliding mode control; MFSMPPC: model-free sliding mode prescribed performance controller.
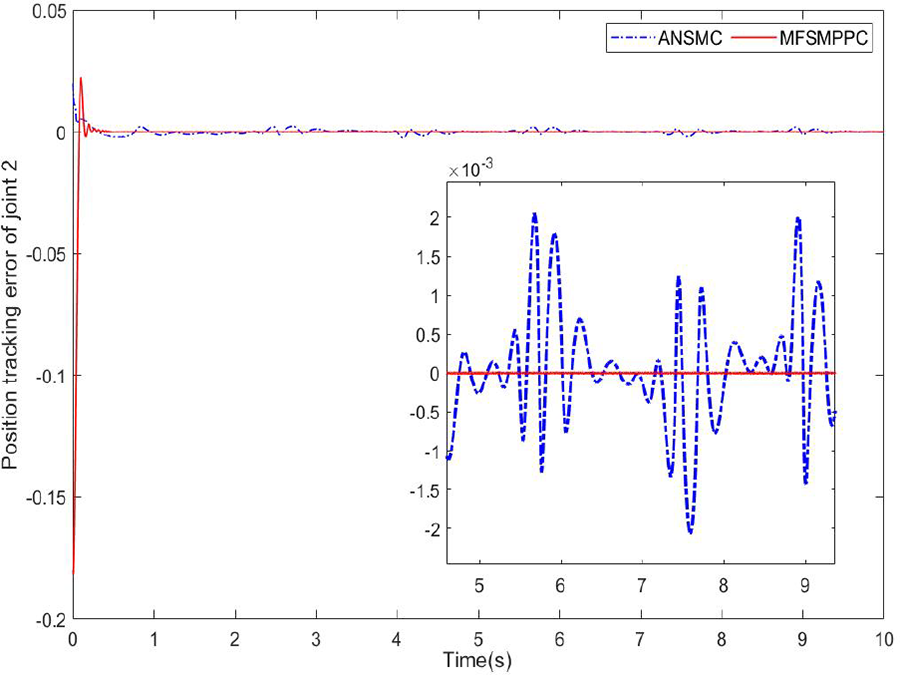
Comparison of tracking errors from joint 2 between ANSMC and MFSMPPC. ANSMC: adaptive nonsingular sliding mode control; MFSMPPC: model-free sliding mode prescribed performance controller.
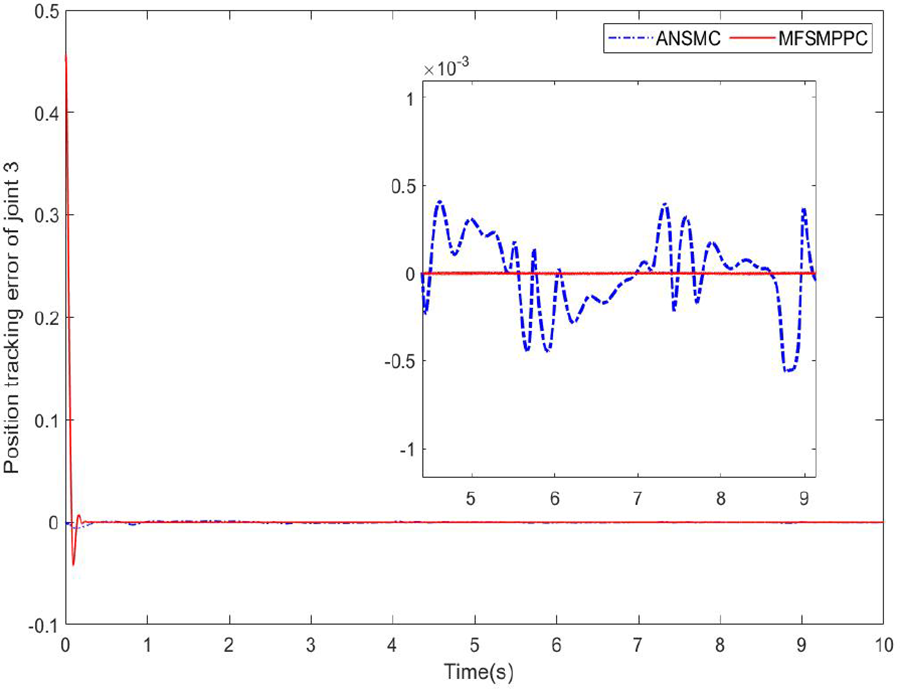
Comparison of tracking errors from joint 3 between ANSMC and MFSMPPC. ANSMC: adaptive nonsingular sliding mode control; MFSMPPC: model-free sliding mode prescribed performance controller.
The velocity tracking error results of all the four methods are also shown in Figures 20 to 22. It is evident that MFSMPPC’s velocity tracking errors are still the lowest.

Comparison of velocity errors from joint 1 among all the control methods.
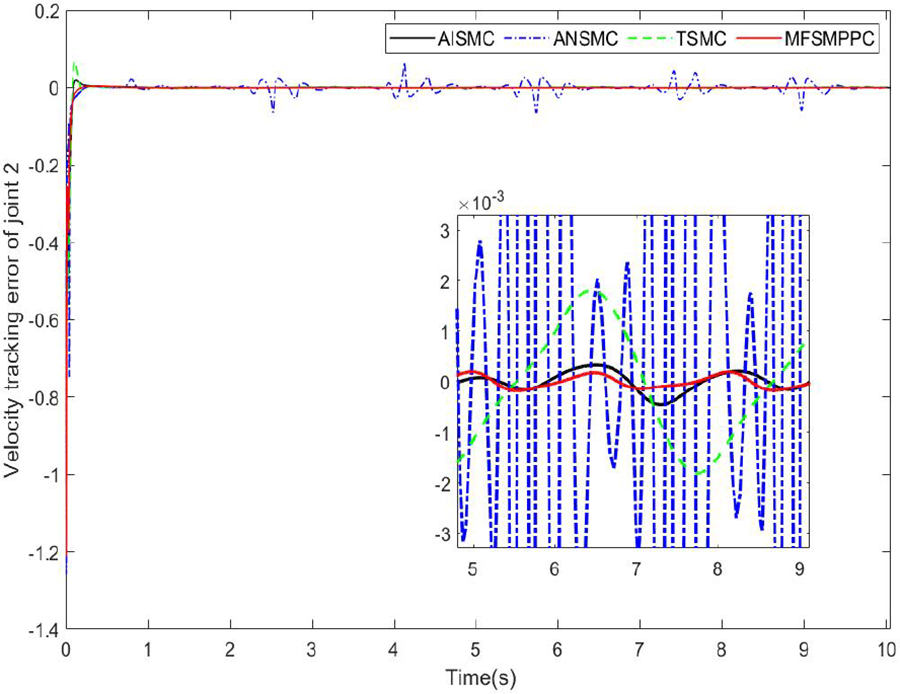
Comparison of velocity errors from joint 2 among all the control methods.

Comparison of velocity errors from joint 3 among all the control methods.
Besides, to quantitatively analyze the effect of each control method, we introduce a concept named average error (AE) and calculate the AE of position tracking and velocity tracking among all the four control methods. The AE results are shown in Tables 9 and 10. AE is formulated as

where
Position AE.

AE: average error; MFSMPPC: model-free sliding mode prescribed performance controller; AISMC: adaptive integral sliding mode control; TSMC: terminal sliding mode controller; ANSMC: adaptive nonsingular sliding mode control.
Velocity AE.

AE: average error; MFSMPPC: model-free sliding mode prescribed performance controller; AISMC: adaptive integral sliding mode control; TSMC: terminal sliding mode controller; ANSMC: adaptive nonsingular sliding mode control.
According to Tables 9 and 10, we can see that MFSMPPC provides the smallest position and velocity AE comparing with other three methods. The specific AE reduction ratios comparing with other three methods are shown in Table 11. On the basis of Table 11, we can see that the position AE reduction ratio are all more than 90% and the velocity AE reduction ratio are all more than 80%.
AE reduction ratio.
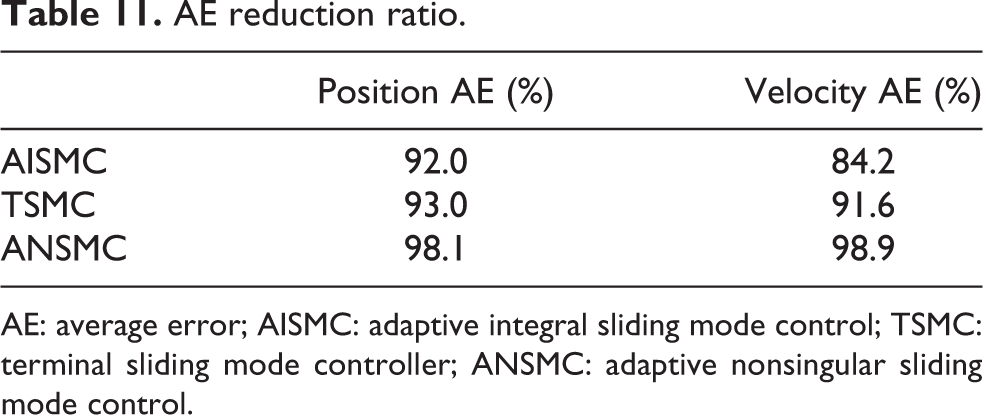
AE: average error; AISMC: adaptive integral sliding mode control; TSMC: terminal sliding mode controller; ANSMC: adaptive nonsingular sliding mode control.
Conclusion
This article puts forward a novel MFSMPPC for robotic manipulator in the presence of the system uncertainties and external disturbances. Different from the traditional TSM control scheme, the error-driven NSFTSM in this article speed up error converging and bring down the driving torque. According to the comparison of simulation results, compared with similar advanced control methods, MFSMPPC has an average reduction ratio of 60.43% for maximum torque. Besides, a new reaching law which combines the hyperbolic tangent function and system state variable is introduced and can offer shorter reaching time and better chattering elimination effect than traditional exponential reaching law. According to the comparison of simulation results, compared with a similar advanced control method, the average convergence time is improved 50.3%. The introduced model-free control idea helps reduce the difficulty of controller design and the dependence of controllers on model parameters. In addition, considering that transient performance is an important indicator of a controller’s performance, we use PPC to limit the transient error to our preset range. Based on Lyapunov’s stability theorem, we achieve the proof of stability and finite-time convergence of the proposed controller. Simulation is conducted at the end and the results demonstrate the effectiveness of the proposed controller. The position AE reduction ratio comparing with the similar state-of-art control methods are more than 90%, and the velocity AE reduction ratio comparing with the similar state-of-art control methods are more than 80%.
In the future, we will study how to design the control method directly based on task space. And the torque tracking of manipulator end effector is also the direction we hope to further study based on this controller. Besides, in the simulation part, we will further consider applying the designed controller to more complex robot models, such as multi-degree-of-freedom parallel robots, for simulation experiments.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (51765042, 61963026).