
Abstract
Nonlinear factors exist in electro-hydraulic shaking table and may distort the response signal when a sinusoidal acceleration is inputted. To obtain accurate harmonics, a harmonic identification strategy for the acceleration of the electro-hydraulic shaking table based on the SA-PSO (Simulated Annealing-Particle Swarm Optimization) algorithm was proposed. First, the criterion function of harmonic identification was built with the least square method. Then, the PSO algorithm was introduced into the internal circulations of the SA algorithm to speed up the local search speed to construct the harmonic identification strategy. To verify the performance of the identification strategy, the SA algorithm, PSO algorithm, and SA-PSO algorithm were successively used to identify the response signal. And the convergence rate, accuracy, and stability of the three algorithms were compared. Finally, the harmonic regeneration was carried out after the amplitude and phase of each harmonic were obtained. Experimental results show that the harmonic identification strategy has fast identification speed and high identification accuracy.
Keywords
1. Introduction
Sinusoidal vibration is a typical vibration, and various periodic vibrations can be simulated in the form of sinusoidal vibration (Yao, 2007). But due to the servo valve dead-zone, friction, joint gap, and other nonlinear factors in the electro-hydraulic shaking table, the acceleration response will produce high-order harmonics and the signal distortion is serious when the shaking table is sinusoidally excited (Yao et al., 2010). This problem not only reduces the dynamic tracking performance of the system but also affects the control accuracy of the system. To suppress the high-order harmonics in the acceleration response, harmonic identification should be carried out first.
At present, the studies of harmonic identification are mainly in power systems. The traditional harmonic identification methods for high-order harmonics are using DFT (Discrete Fourier Transform) or FFT (Fast Fourier Transform) to analyze the signal in the frequency domain (Sujitjorn et al., 2007). The former is achieved by decomposing a series of signal values into components of different frequencies, but it is often too time-consuming to directly use the definition of DFT. The latter is a faster calculation method that can obtain the same results (Yao et al., 2014b). However, DFT and FFT need to be carried out offline, which has a great influence on the real-time hydraulic shaking table (Jain et al., 2018; Wang et al., 2020).
Santiprapan et al. (2017) used DQFP (DQ-axis Fourier with a positive sequence voltage detector) to construct the harmonic identification for active power filters. Almaita and Asumadu (2011) proposed a harmonic identification method in converter waveforms based on radial basis function neural network. Nascimento et al. (2011) used parallel neural networks for harmonic identification in single-phase systems. Yepes et al. (2010) proposed harmonic identification algorithms based on DCT for power quality applications. Giannini et al. (2013) proposed a harmonic identification method that could detect very small cracks. But the difference between other systems and electro-hydraulic system limits the application of the algorithms.
Wavelet analysis is an important tool in time-domain analysis. It decomposes the signal containing harmonics by orthogonal wavelet transform. Using the concept of multi-resolution, the high-scale results are regarded as fundamental components without harmonics. Wavelet analysis overcomes the shortcomings that FFT is completely localized in the frequency domain and completely non-localized in the time domain (Yao et al., 2017). But the algorithm has a large computing burden and poor real-time performance (Zhang, 2019).
In recent years, intelligent optimization algorithms such as Neural Network, Ant Colony Optimization, Tabu Search, and Genetic Algorithm have been gradually applied to the field of harmonic identification. Their high parallel computing efficiency and global optimization ability improve the efficiency of harmonic identification.
Yao et al. (2013) used LMS adaptive algorithm to identify acceleration harmonics, whose weights were updated according to the error between the actual response and the estimated signal. The structure of the algorithm was simple, but the oscillation of the identification curves of high-order harmonics was obvious and the identification accuracy was low. Yao et al. used the Kalman filter (2014a), the unscented Kalman filter (2014b), and the extended Kalman filter (2015) for harmonic identification. The identification strategies had strong stability and high accuracy, but the identification speed was relatively slow. This was because Kalman filtering was difficult to apply to nonlinear systems. Yao et al. (2016) used RBF Neural Network for acceleration harmonic identification, whose structure was simple but the identification error was large. Yao et al. (2017) proposed the identification strategy based on the gradient algorithm. The method could obtain harmonics directly without prior knowledge of the system, but its identification speed was relatively low.
Ji et al. (2011) utilized an adaptive bacterial swarming algorithm to identify the frequencies and phases of power system harmonics in dynamic environment. The algorithm had better robustness than GA algorithm, but the identification error was large. Rabelo et al. (2012) studied power system harmonics estimation using Particle Swarm Optimization (PSO) algorithms and compared the experimental results with the traditional DFT to evaluate the identification accuracy. Ketabi et al. (2012) proposed a method of harmonic state estimation for power quality meters. The method used seeker optimization algorithm (SOA) and got high identification accuracy. However, most of the current intelligent algorithms applied to harmonic identification are single algorithms and fail to achieve a better combination of different optimization algorithms (Ying et al., 2021).
Through the above analysis, it can be seen that the difficulties of harmonic identification of electro-hydraulic shaking table are mainly that the identification speed is difficult to meet real-time requirements and the identification accuracy is low. This paper will design a real-time accurate algorithm to solve these problems. Firstly, this paper introduces the control principle of the electro-hydraulic shaking table and the distortion of the harmonic signal. After the mathematical description of the time-invariant single-input single-output system is derived, the criterion function is constructed by using the least square method. Then, the SA (Simulated Annealing) algorithm and PSO algorithm are used to solve it. At the same time, the PSO algorithm is introduced into the internal circulations of the SA algorithm to construct the harmonic identification strategy. To verify the performance of the identification strategy, the SA algorithm, PSO algorithm, and SA-PSO algorithm are used for harmonic identification. The hyper-parameters of the SA-PSO algorithm are obtained by simulation. Finally, the identification speed and accuracy are further verified by comparing the tracking performance and iterative error. The results of harmonic regeneration can be used as the basis for harmonic suppression.
2. Electro-hydraulic shaking table
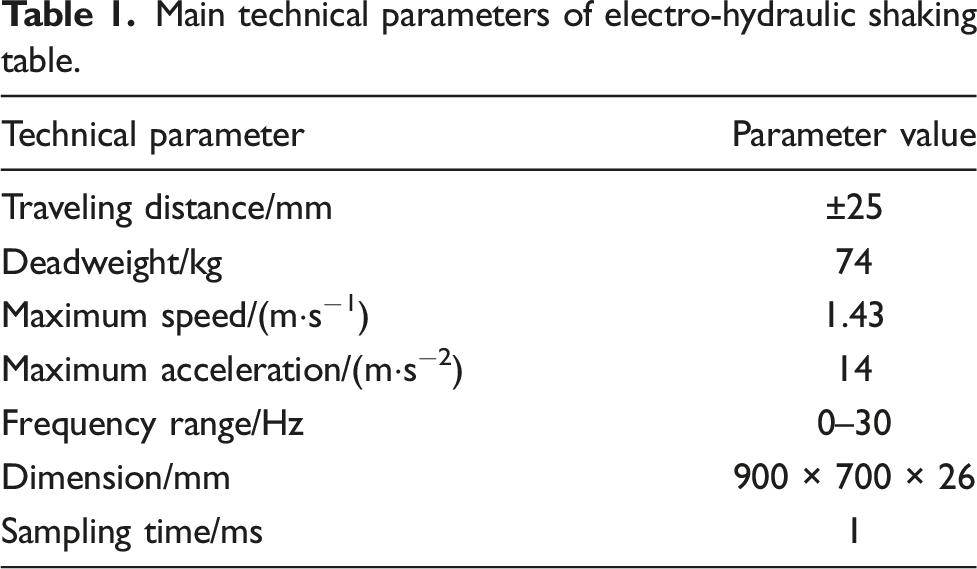
The control scheme of the electro-hydraulic shaking table analyzed in this paper is shown in Figure 1. The whole system is under acceleration control. The input signal is filtered to obtain three input states (Displacement, Velocity, and Acceleration). The acceleration and displacement of the shaking table are obtained by the acceleration sensor and the displacement sensor. The three-variable feedback is amplified and filtered by the conditioning circuit. Then, the three-variable controller generates the deviation signal. By controlling the reciprocating motion of the servo valve, the signal uses the oil pressure to push the piston to move. Thus, it can drive the shaking table to move. (Yao et al., 2014b). The main technical parameters of the shaking table are shown in Table 1. Principle of the control system for electro-hydraulic shaking table. Main technical parameters of electro-hydraulic shaking table.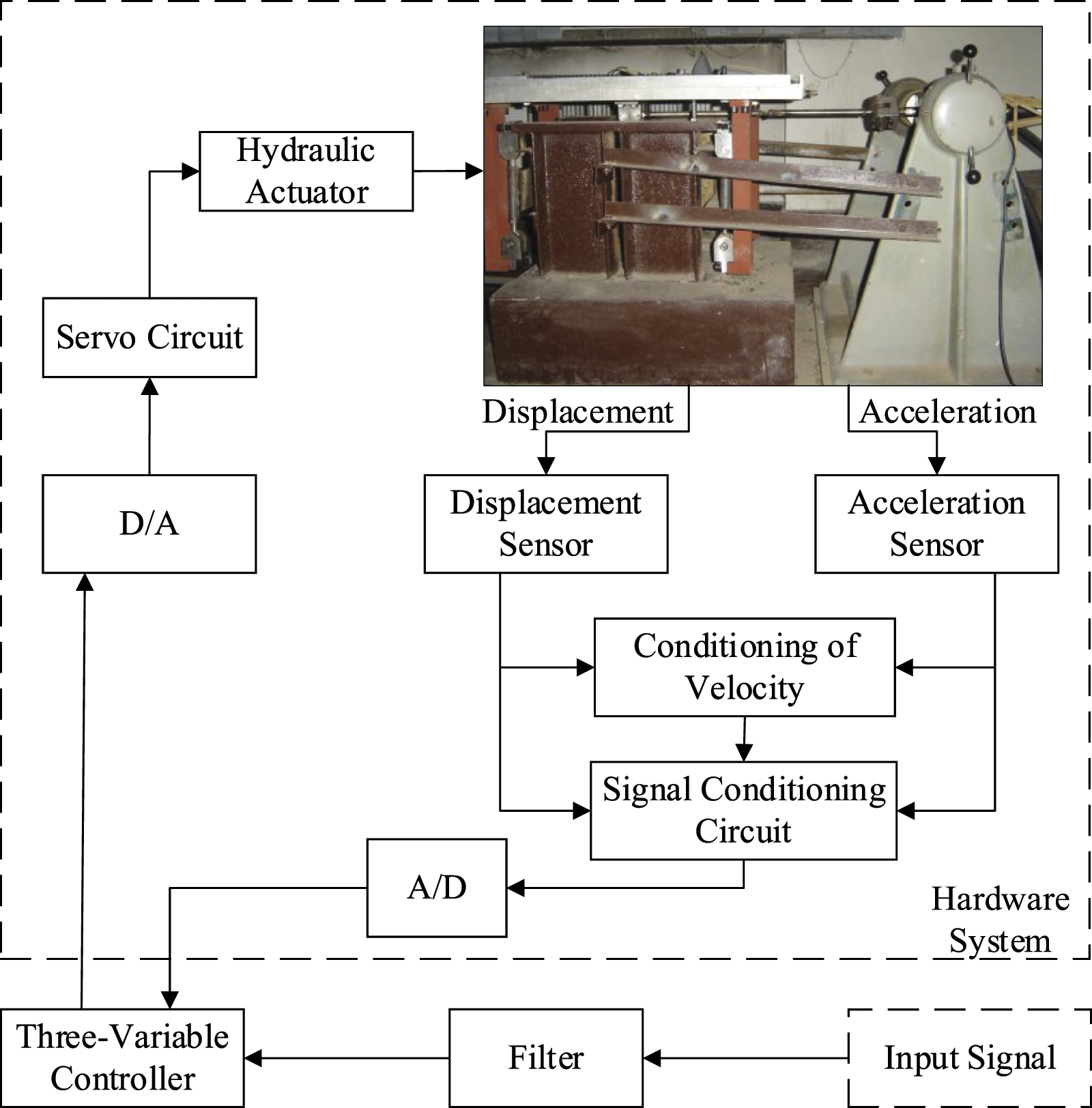
The sinusoidal vibration test was carried out on the shaking table shown in Figure 1. The time-domain response is shown in Figure 2(a) when the input sinusoidal acceleration signal is −3sin (2π * 8t) m·s−2. The acceleration response signal is seriously distorted due to the nonlinear factors of the system. The frequency response obtained by FFT is shown in Figure 2(b). It can be seen that the output has the fundamental and five high-order harmonics. The harmonic amplitudes, respectively, are 2.6289, 0.4072, 0.6307, 0.3203, 0.1054, and 0.0036. Signal distortion; (a) Time-domain response and (b) Spectrum of the response signal.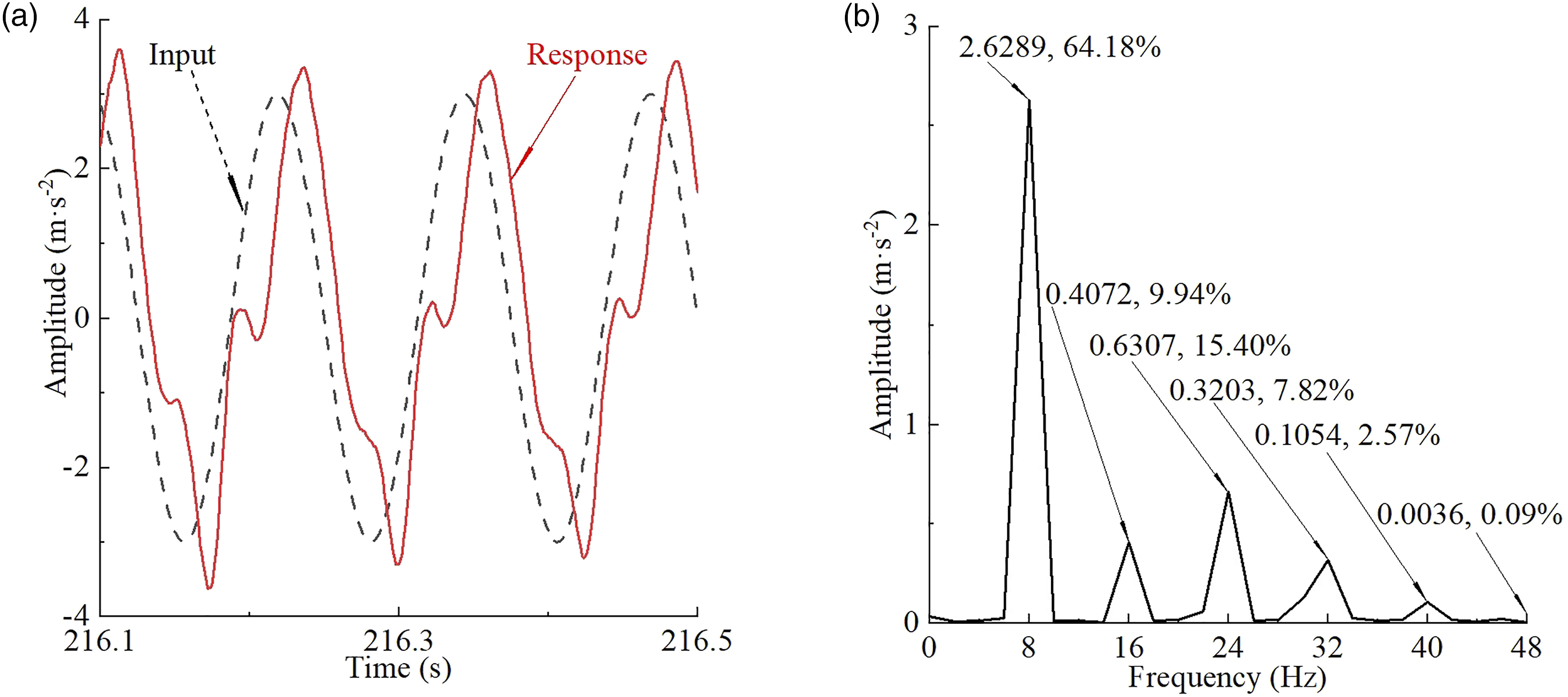
The expression of THD (Total Harmonic Distortion) is
The THD calculated by equation (1) is 32.28%, so the signal distortion is serious.
3. Principle of SA and PSO algorithm
The time-invariant single-input single-output system is described by the difference equation as:
Define the following variables:




The best estimation of the parameter
To solve the problem, the current main algorithms include the steepest gradient descent algorithm, Newton method, Gauss-Newton method, and L-M algorithm (He et al., 2015; Umar et al., 2021). However, the above traditional optimization methods have the disadvantages of high requirements for the objective function, difficulty in parallel computing, low efficiency, and weak ability to jump out of the local optimal solution. But intelligent algorithms such as SA algorithm and PSO algorithm can greatly improve the efficiency of solving.
3.1. SA algorithm
Simulated Annealing algorithm is a global intelligent optimization algorithm (Luo and Fu, 2019). It can be applied to the iteration of the criterion function
The probability of accepting a new state in SA algorithm is expressed as:
The basic steps of SA algorithm are as follows for the least-squares problem proposed by equation (6): (1) The algorithm is initialized. It also sets the maximum number of internal circulations n(T
k
), and lets the number of internal circulations s = 1. (2) Randomly generate a neighborhood (3) If ∆J(k) is less than zero, let (4) If s > n(T
k
), turn to (5) to continue. Otherwise, turn to (2) to continue. (5) Reduce T
k
. If T
k
is less than final temperature T
f
, the algorithm terminates. Otherwise, Let s = 1 and turn to (2) to continue. (6) The SA algorithm outputs optimal state
The wide-area search performance of SA algorithm is good when T k is large, and the local search performance is good when T k is small. The system approaches the optimal solution when T k approaches zero. To enhance the local search performance of the SA algorithm at higher T k and accelerate the convergence rate of the system, the PSO algorithm can be introduced into the internal balance of the SA algorithm.
3.2. PSO algorithm
Particle Swarm Optimization algorithm is a group-based global optimization algorithm (He et al., 2022). The M particles follow the optimal particle to search in solution space. The position of the r-th (r = 1, 2, …, M) particle is a potential solution, i.e., the estimated value 

The velocity of each particle expressed in equation (9) contains three parts. Among them, 
4. Harmonic identification strategy
The frequencies of high-order harmonics shown in Figure 2(b) are integral multiples of the fundamental. The sampled acceleration is a discrete signal and a linear superposition of harmonics (Yao et al., 2017). Therefore, the acceleration response can be expressed as the decomposition of fundamental and high-order harmonics:
To apply the SA-PSO algorithm to harmonic identification, equation (12) can be decomposed into the following forms:


The amplitude and phase of the i-th harmonic can be calculated as:
The i-th harmonic can be expressed as: Block diagram of the acceleration harmonic identification.
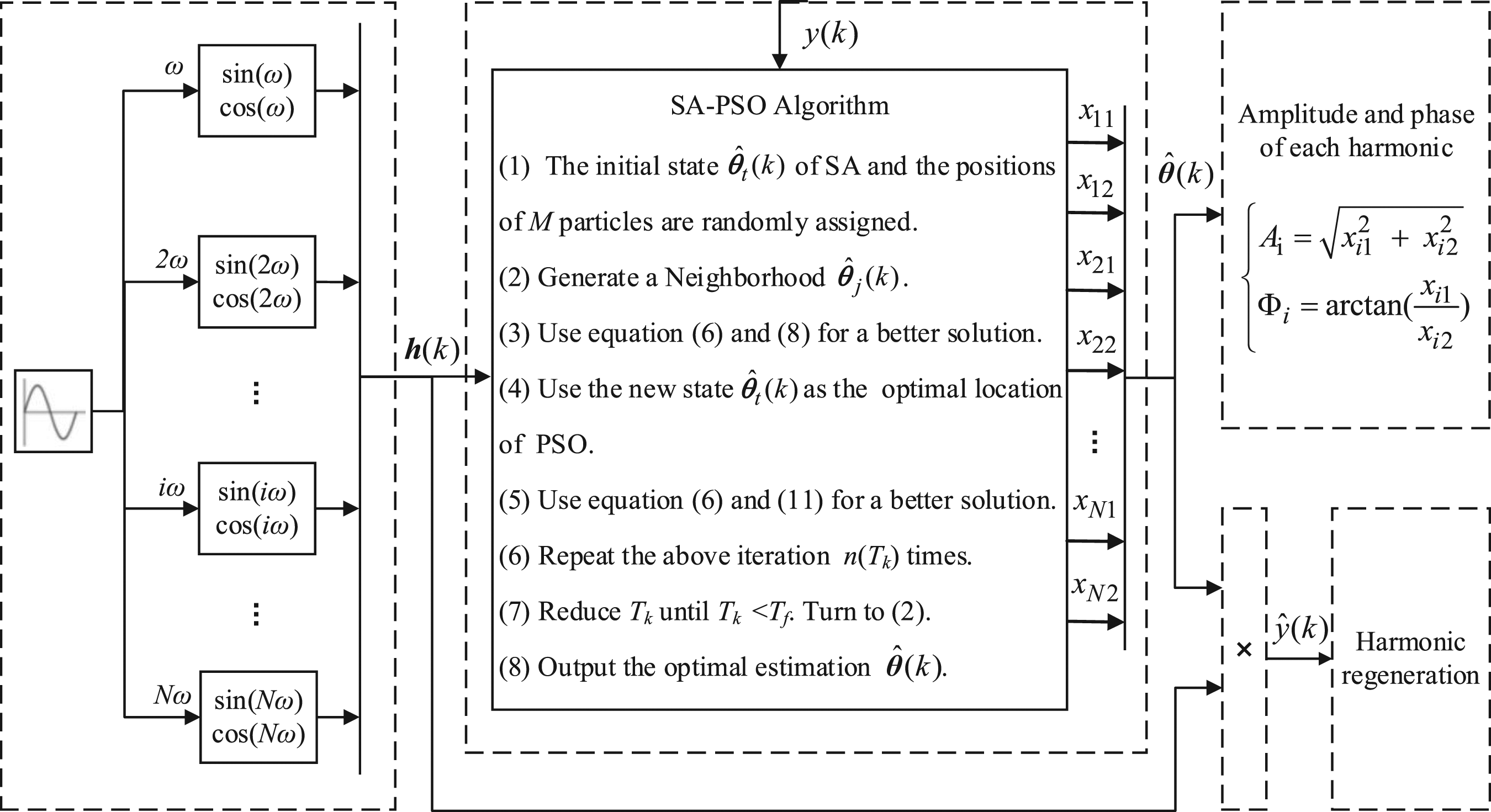
In Figure 3, the input vector
5. Experiments of harmonic identification
In the experiments, first, the SA algorithm and PSO algorithm were used for harmonic identification independently. Then, the SA-PSO algorithm was proposed to compare the performance of the three. Finally, the tracking curves and error curves and harmonic regeneration of the three algorithms were calculated.
5.1. Experiments of the SA algorithm
In the SA algorithm, the initial temperature T0 was set to 100; the final temperature T
f
was set to 0.01; the number of internal circulations n(T
k
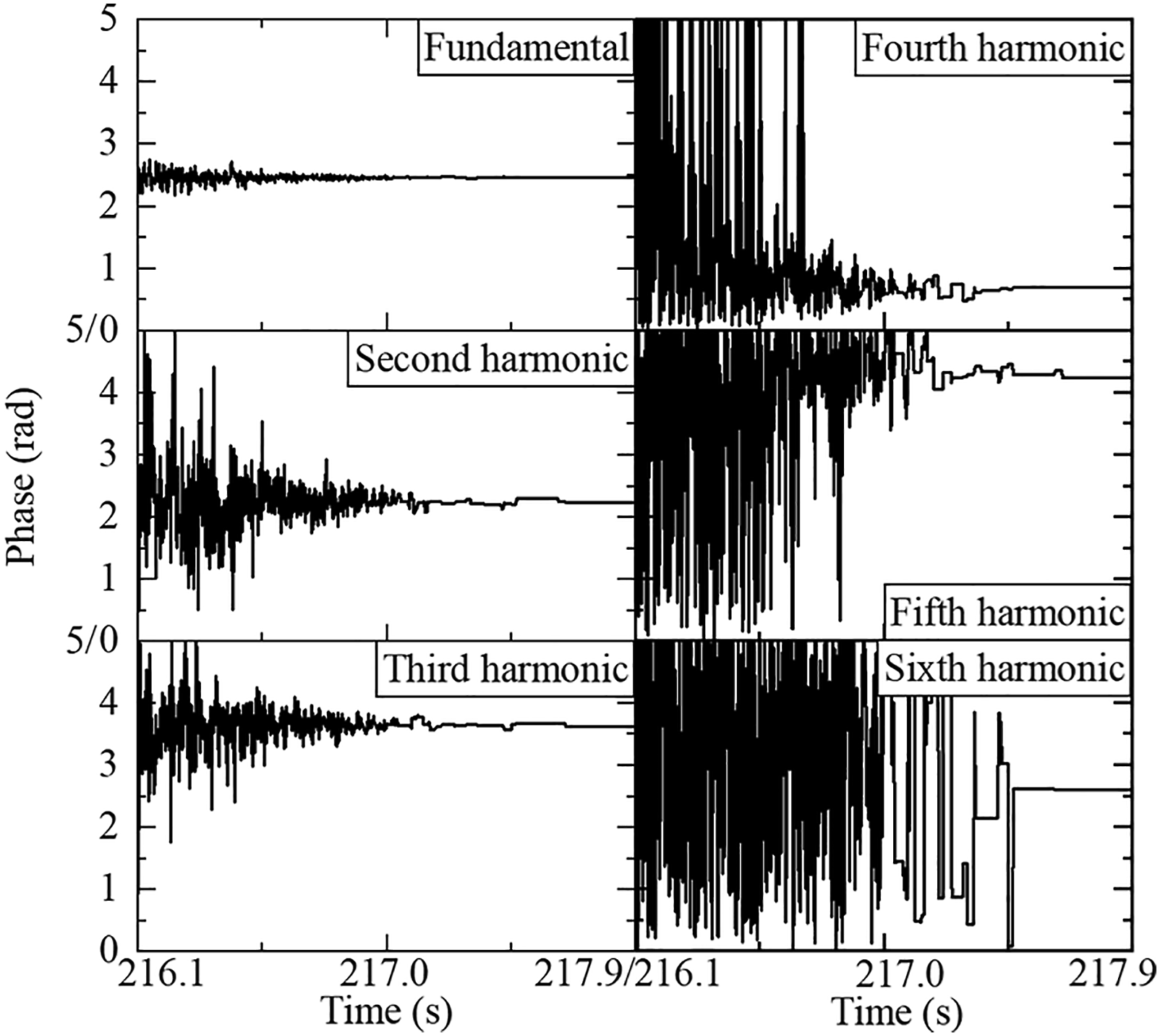
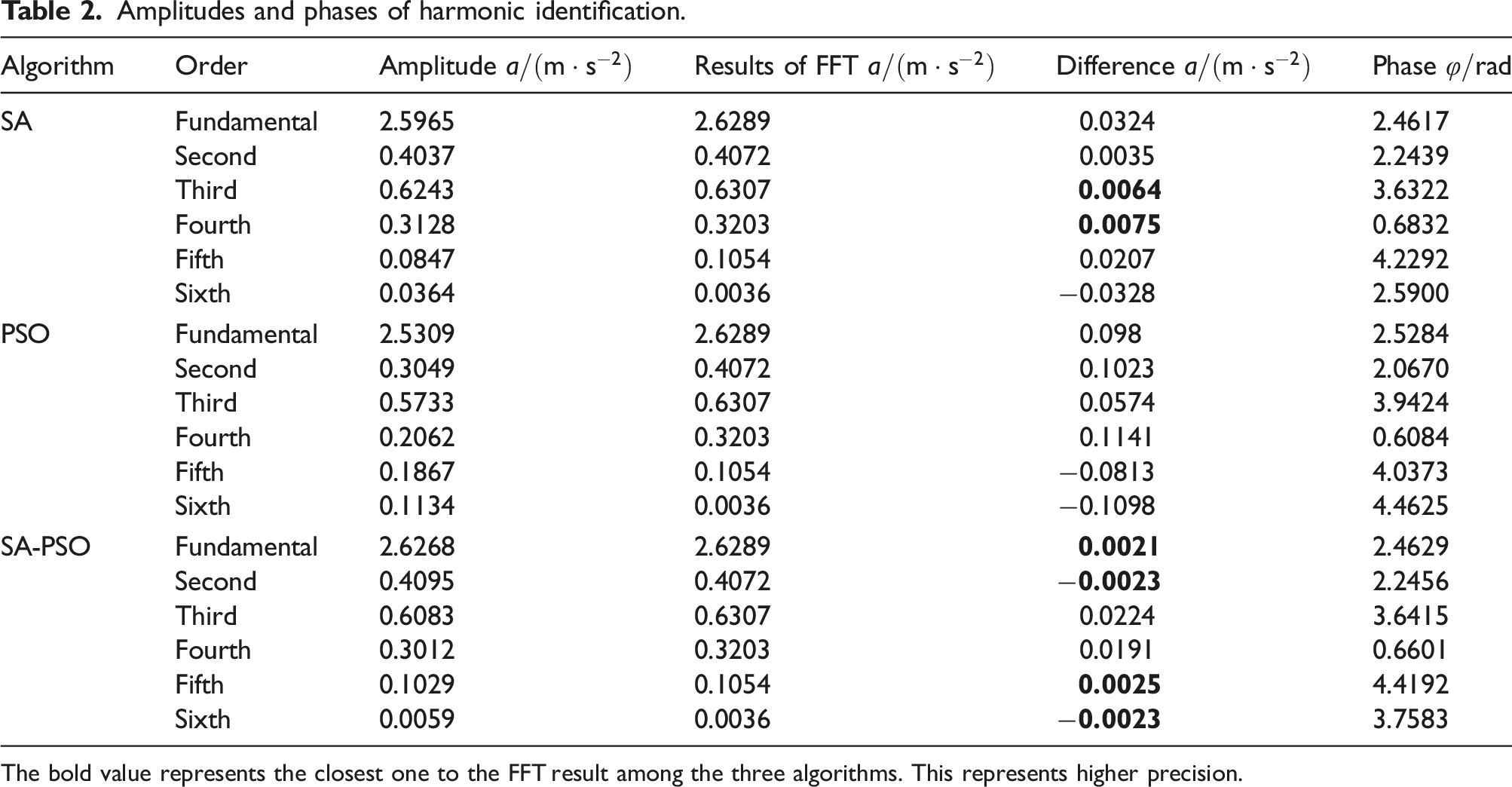
) was set to 1000, and the coefficient of temperature was set to 0.99. The results of amplitude identification and phase identification of the SA algorithm are shown in Figure 4 and Figure 5, and the specific values of amplitudes and phases are shown in Table 2. Harmonic amplitudes under the Simulated Annealing (SA) algorithm. Harmonic phases under the SA algorithm. Amplitudes and phases of harmonic identification. The bold value represents the closest one to the FFT result among the three algorithms. This represents higher precision.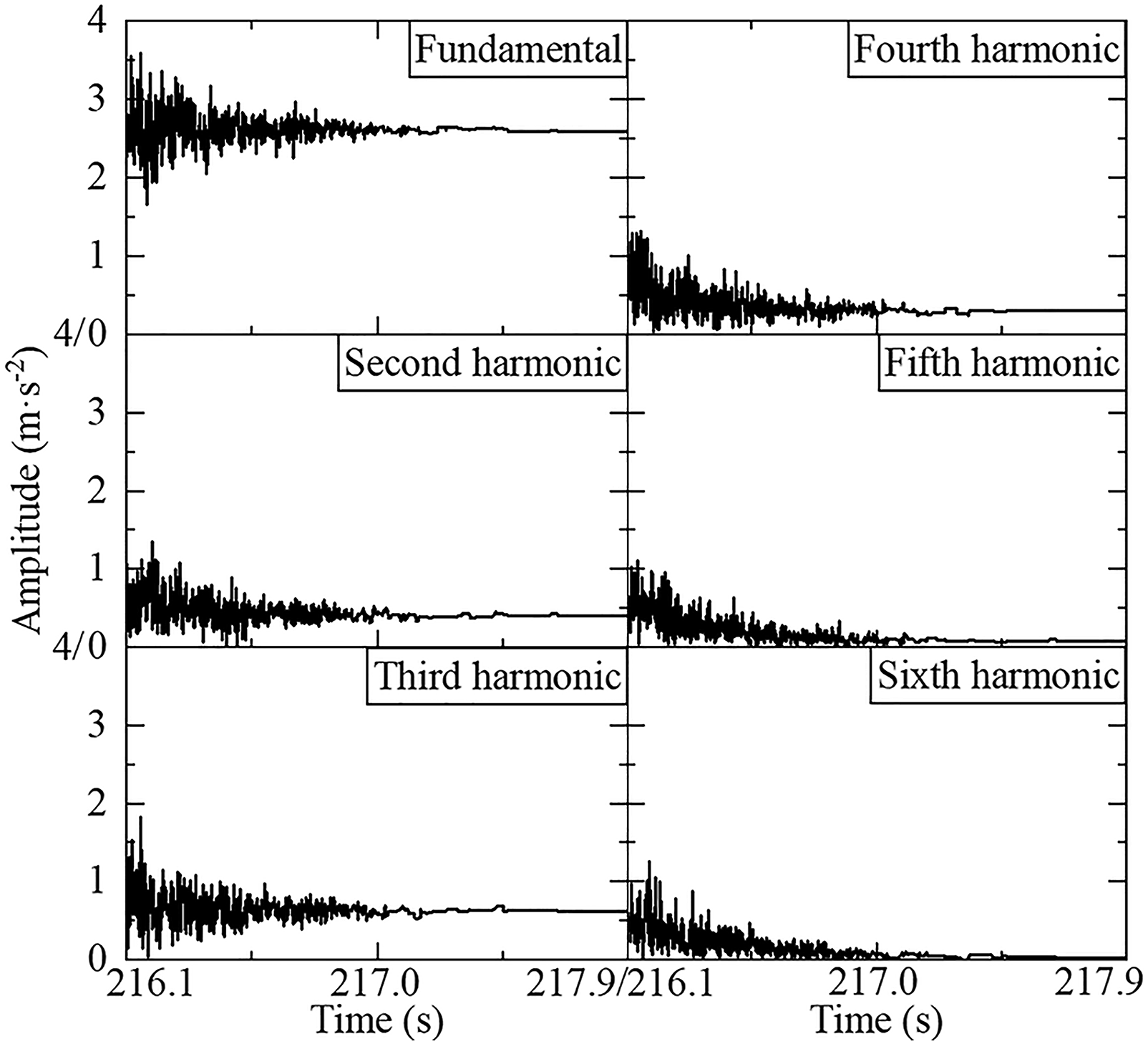
It can be seen from Figure 4 that the SA algorithm needs about 1.0 s to achieve convergence in the amplitude identification. The convergence rate of the amplitude of each harmonic is equivalent. At the same time, although the amplitudes finally converge, the oscillations of curves are obvious in the identification process. This phenomenon may affect the stability of the shaking table.
It can be seen from Figure 5 that the SA algorithm needs about 1.6 s to achieve full convergence in the phase identification. The oscillation of the identification process becomes more and more intense with the increase of the order of harmonic. The oscillations are more obvious compared with the amplitude identification. The oscillations of 5th and 6th harmonics are the most obvious, mainly because they occupy the least dominant position in harmonic signals. So, it is necessary to optimize the SA algorithm based on the above analysis.
5.2. Experiments of the PSO algorithm
The PSO algorithm shown by equation (9) and equation (10) was used to identify the acceleration response. The number of particles was set to 10; the inertia weight w was set to 0.99; the weight of cognitive part c1r1 and the weight of social part c2r2 was set to 0.1645. The results of amplitude identification and phase identification of the PSO algorithm are shown in Figure 6. The specific values of amplitudes and phases are shown in Table 2. Output of the Particle Swarm Optimization (PSO) algorithm; (a) Harmonic amplitudes and (b) Harmonic phases.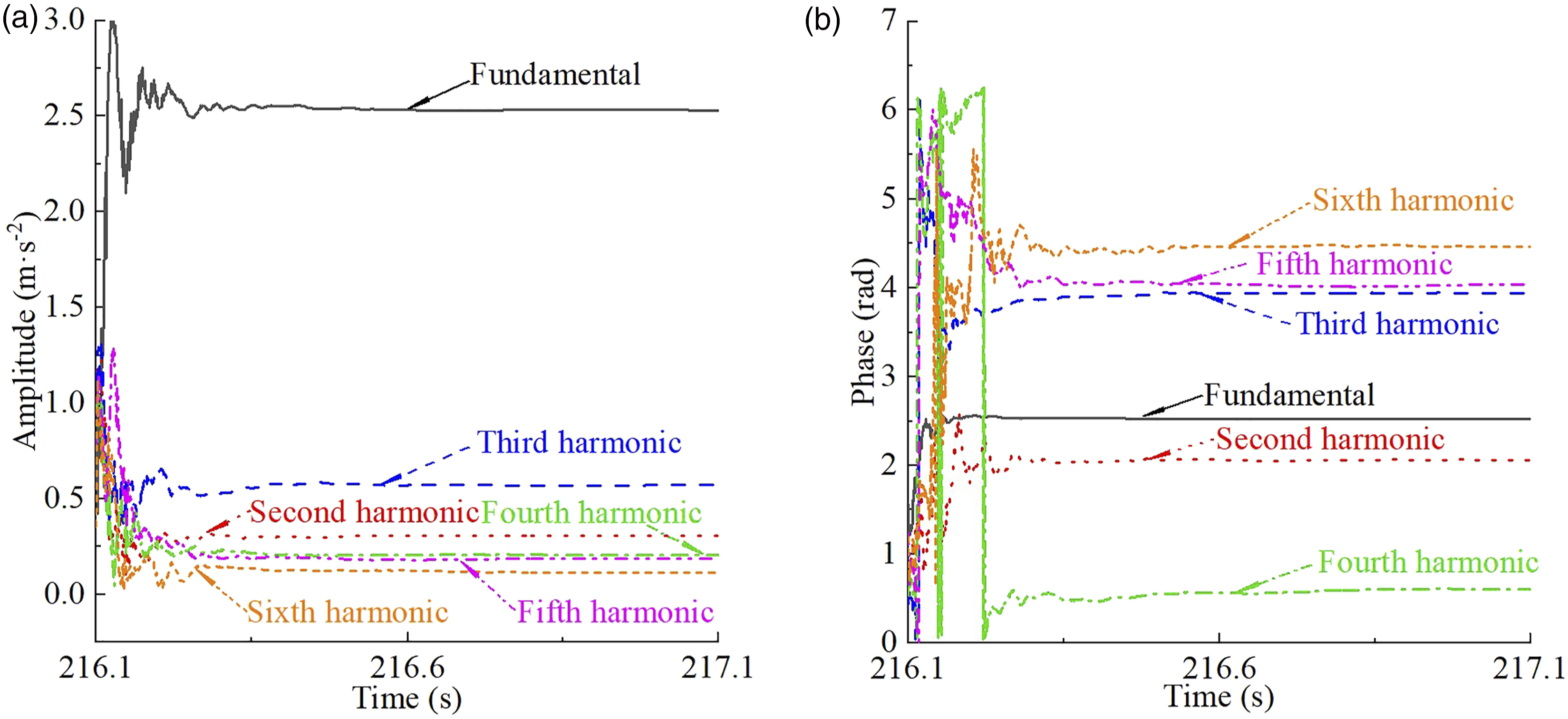
From Figure 6, it can be seen that the PSO algorithm can achieve convergence only in 0.5 s. The convergence rate of the amplitudes is equivalent. The convergence rate of phases gradually slows down with the increase of the order of harmonics. However, the amplitudes identified by the PSO algorithm are 2.5309, 0.3049, 0.5733, 0.2062, 0.1867, and 0.1134. These are quite different from those identified by FFT.
Simulated Annealing algorithm has high accuracy but slow convergence rate, and PSO algorithm has fast convergence rate but low accuracy. Therefore, if a reasonable model is designed to combine the SA algorithm and PSO algorithm, the advantages of both sides can be combined and the shortcomings of both sides can be improved. The PSO iterative formula given by equation (11) was used to optimize the SA algorithm. That is, the particles were introduced into the internal balance of the SA algorithm for local optimization.
5.3. Experiments of the SA-PSO algorithm
In the SA-PSO algorithm, the most important hyper-parameters are the coefficient of temperature, number of internal circulations, and number of particles. Figure 7, Figure 8, and Figure 9 are the influence of the three hyper-parameters on the convergence time and accuracy. The accuracy for evaluating hyper-parameters is calculated as Influence of coefficient of temperature; (a) Influence on convergence time and (b) Influence on accuracy. Influence of number of internal circulations; (a) Influence on convergence time and (b) Influence on accuracy. Influence of number of particles; (a) Influence on convergence time and (b) Influence on accuracy.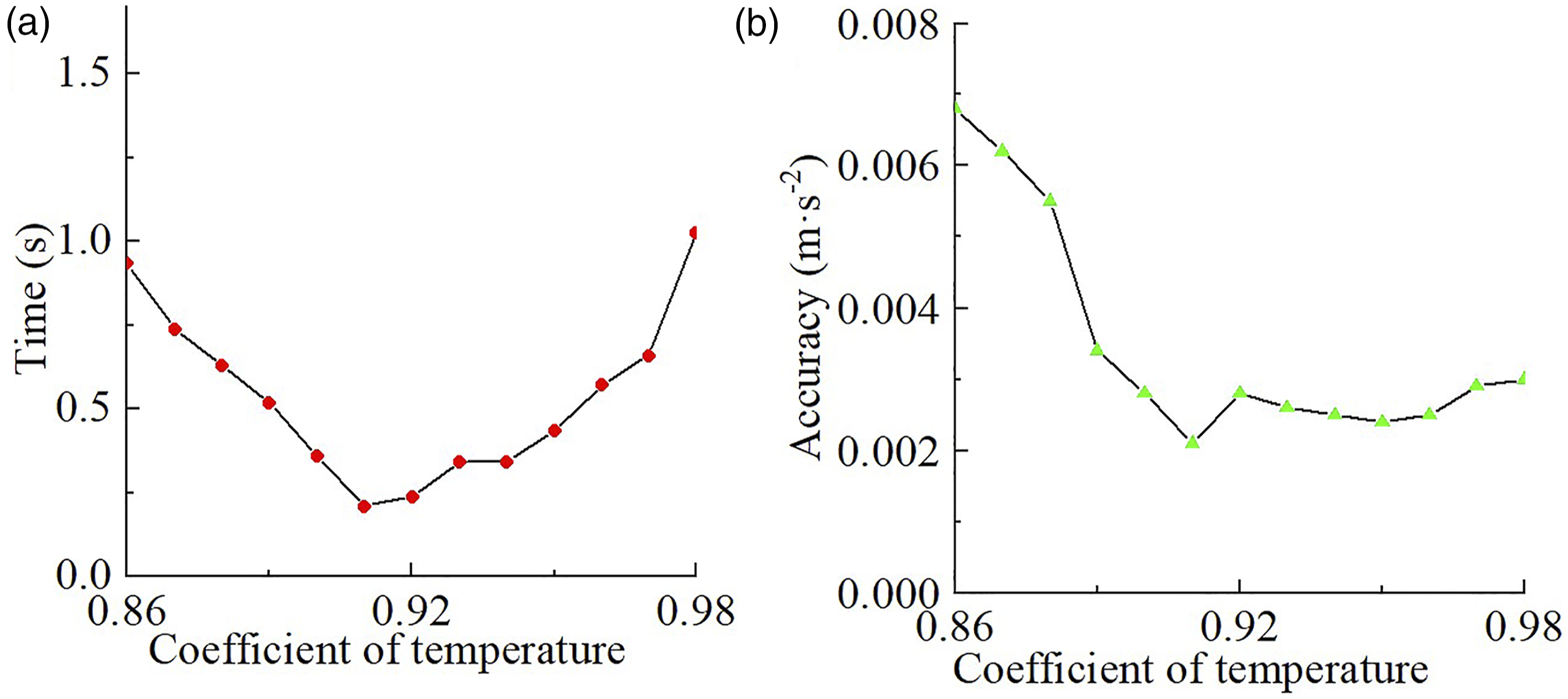
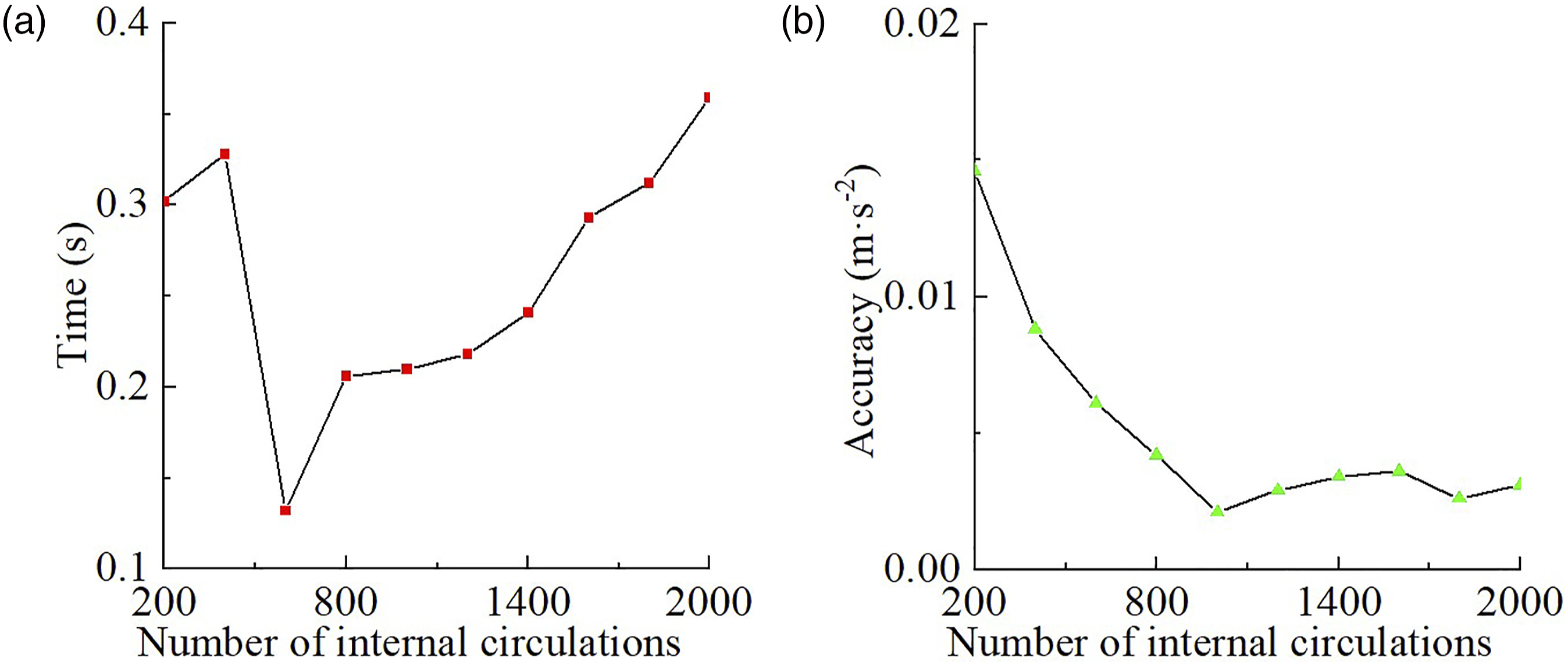
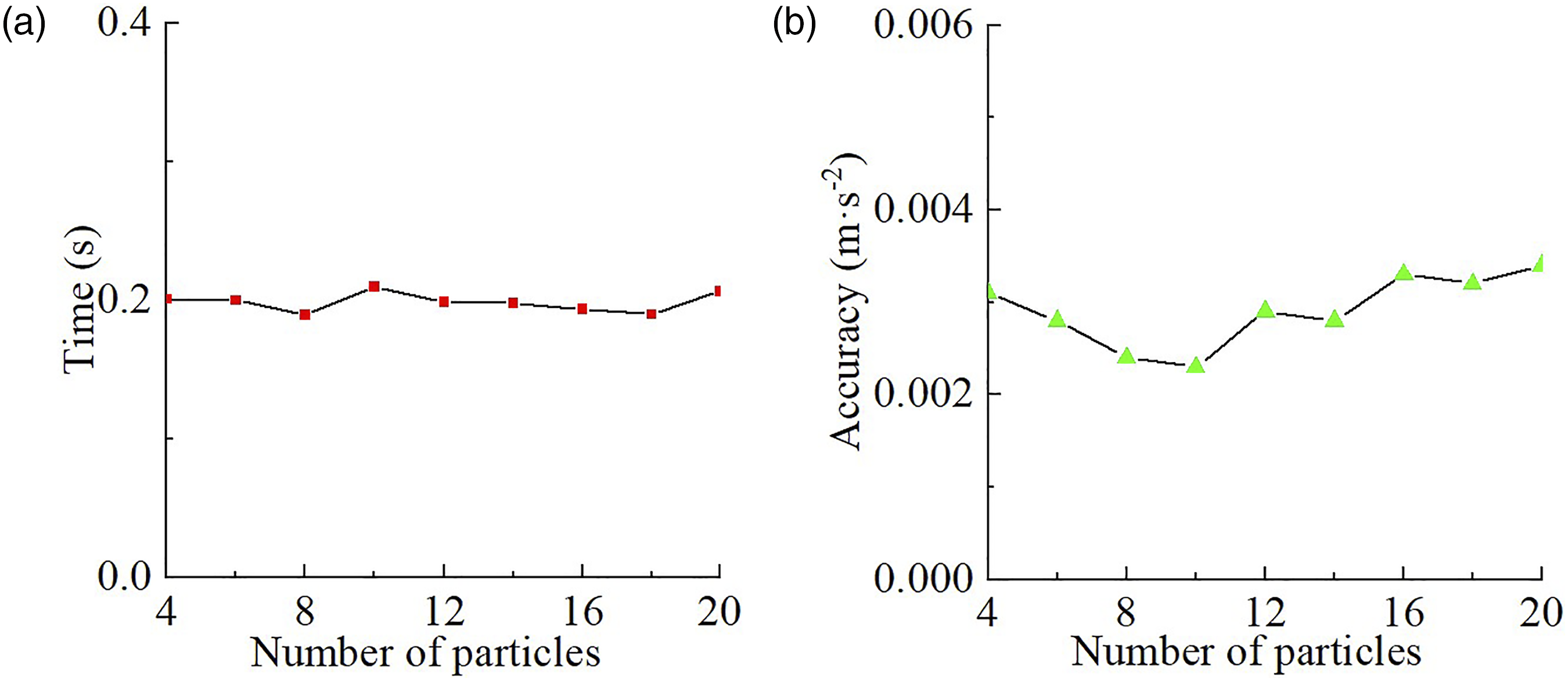
It can be seen from Figure 7 that the convergence rate and accuracy of the SA-PSO algorithm are better when the coefficient of temperature is 0.91. It can be seen from Figure 8 that the algorithm converges faster when the number of internal circulations is less, but the accuracy is low. With the increase of the number of internal circulations, the convergence time is gradually increased and the accuracy is gradually improved. But the accuracy will decrease when the number is too large. Therefore, the number of internal circulations is set to 1000. Figure 9 shows that the number of particles has little effect on the convergence rate, and the accuracy is higher when the number of particles is set to 10. In addition, the weight of social part c2r2 was set to 0.00985. The results of amplitude identification and phase identification are shown in Figure 10, and the specific values are shown in Table 2. Output of the SA-PSO algorithm; (a) Harmonic amplitudes and (b) Harmonic phases.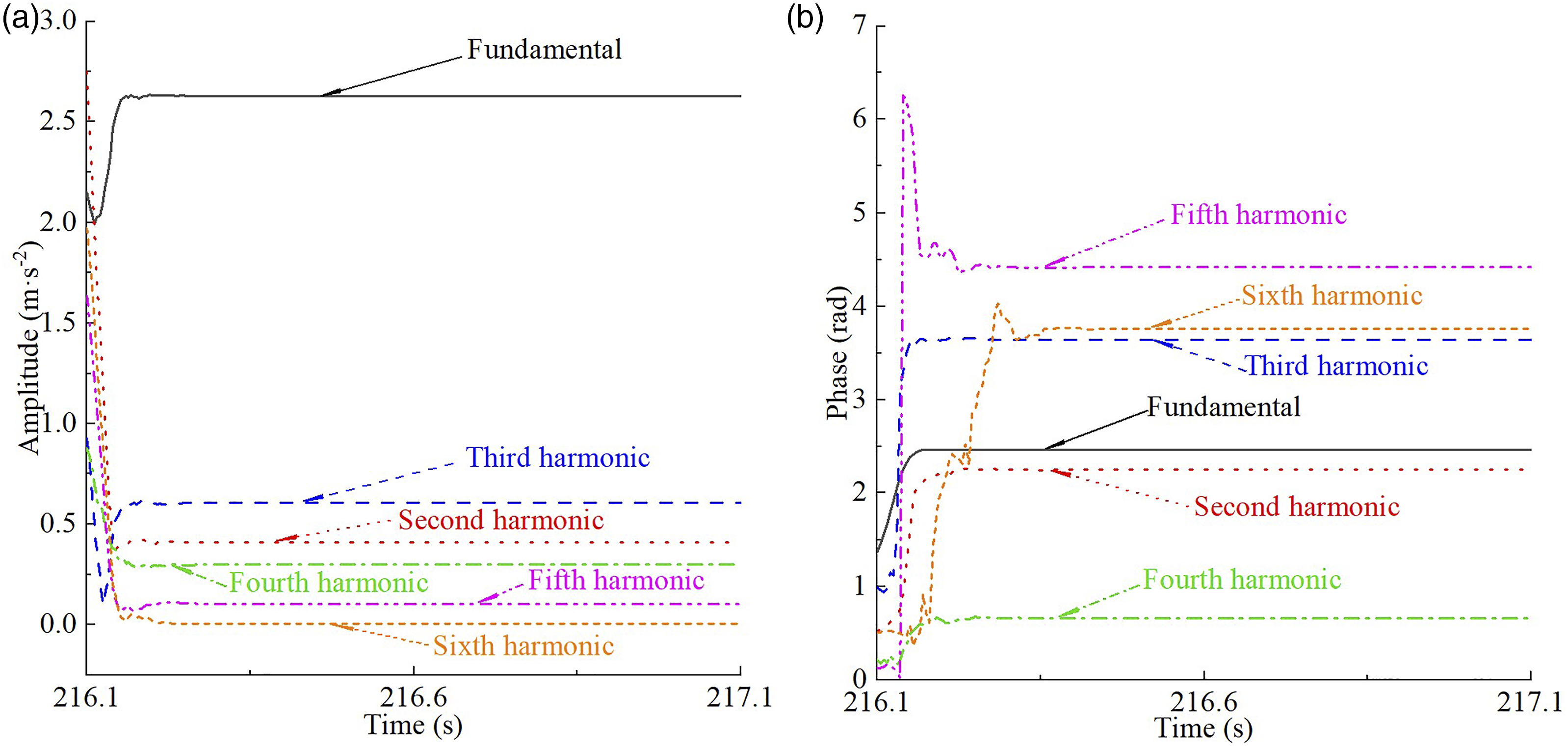
It can be seen from Figure 10 that the convergence rate of the SA-PSO algorithm even exceeds that of the PSO algorithm. The identification accuracy and stability of the SA-PSO algorithm have been greatly improved. The oscillation problem of the identification curves has been solved. It is conducive to the stability of the shaking table. At the same time, due to the fast convergence rate, the SA-PSO algorithm can meet the real-time requirements of the shaking table.
5.4. Comparison
Based on the above discussion, by identifying the amplitudes and phases, the SA-PSO algorithm can track the actual response signal. The tracking result can be used to determine the identification speed and accuracy of the algorithm. The comparisons between the identification outputs of the three algorithms and the actual signal to be identified are shown in Figure 11. Comparison between identification outputs and actual identified signal.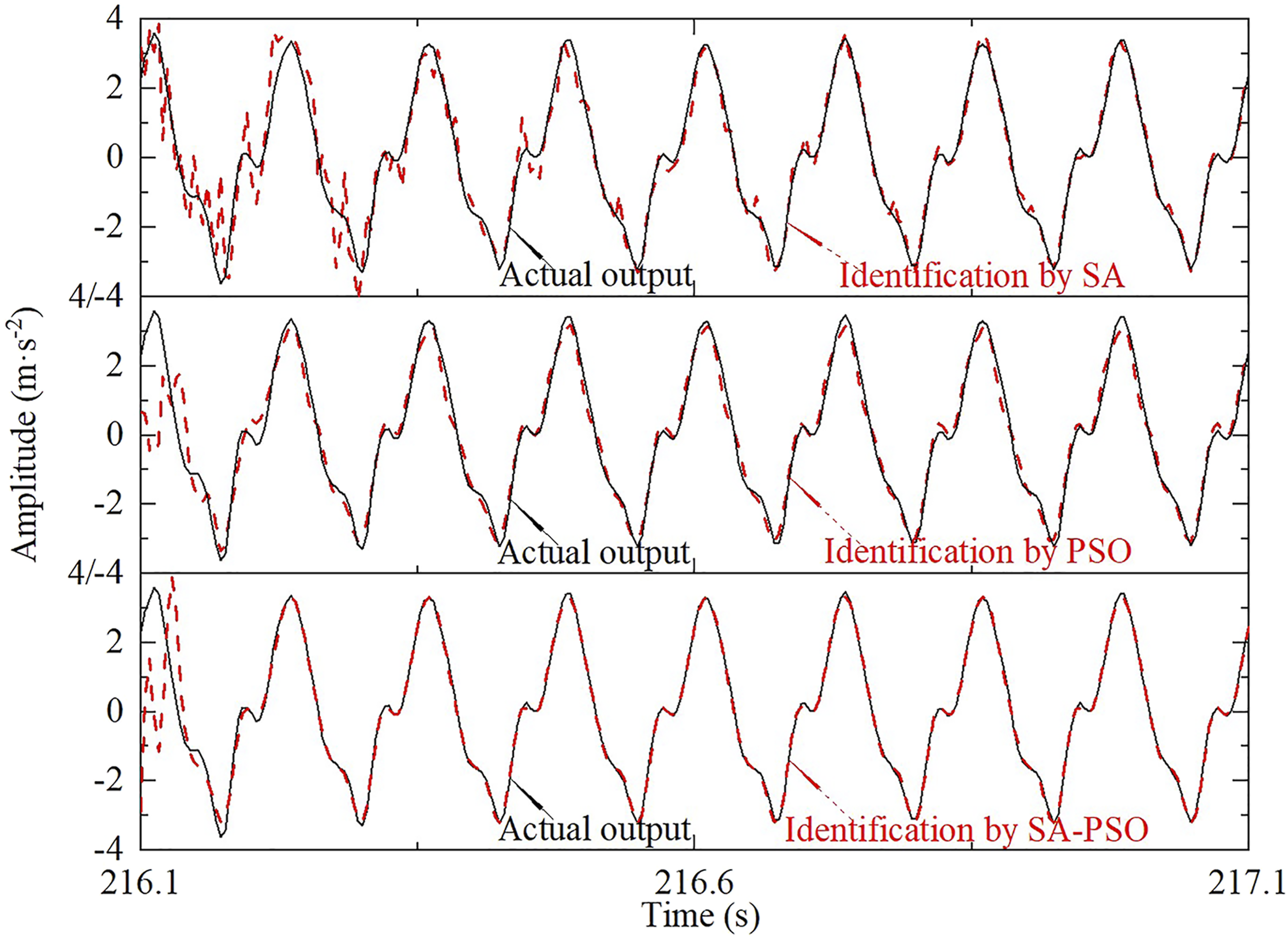
It can be seen from Figure 11 that the convergence rate of the SA algorithm is slow. But the error between the identification result and the actual signal is small after convergence. This shows that the SA algorithm has high identification accuracy. The convergence rate of the PSO algorithm is fast. But the error after convergence is large. Among the three algorithms, SA-PSO algorithm has achieved the best results in terms of identification speed and identification accuracy.
According to the data in Table 2, it can be seen that the accuracy of the amplitude obtained by the SA-PSO algorithm is higher than that of the SA algorithm and PSO algorithm. Although the accuracy of the SA algorithm is slightly higher in the third and fourth harmonics, the overall performance of the SA-PSO algorithm is better. To further verify the identification accuracy and speed of the SA-PSO algorithm, the errors between identification results and actual signal in the identification process are shown in Figure 12. Identification error of the 3 algorithms.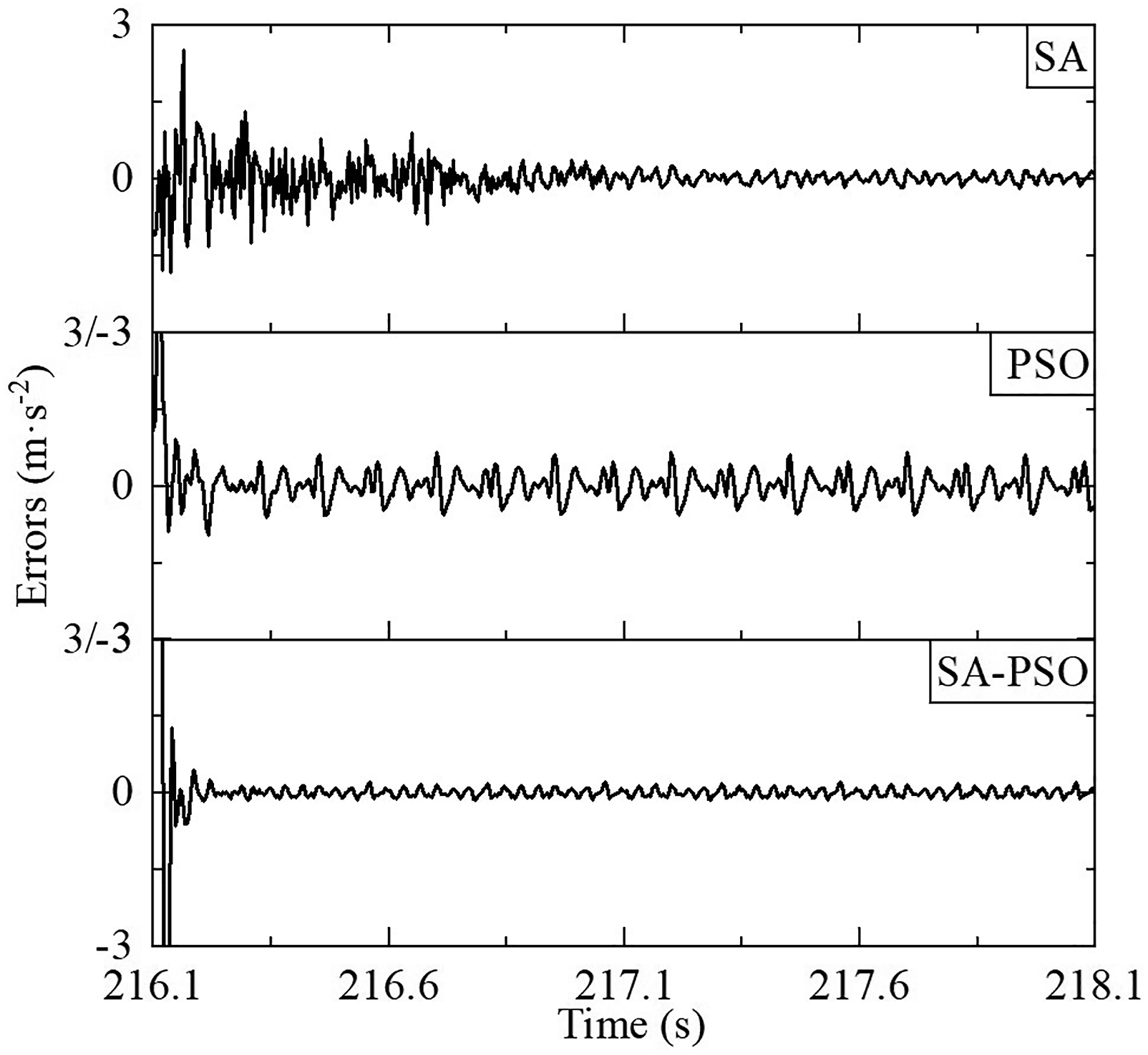
After the amplitude and phase of each harmonic are obtained, the harmonic regeneration can be carried out, and the results are shown in Figure 13. After the reconstructed harmonics are obtained, the high-order harmonics can be suppressed. Results of harmonic regeneration.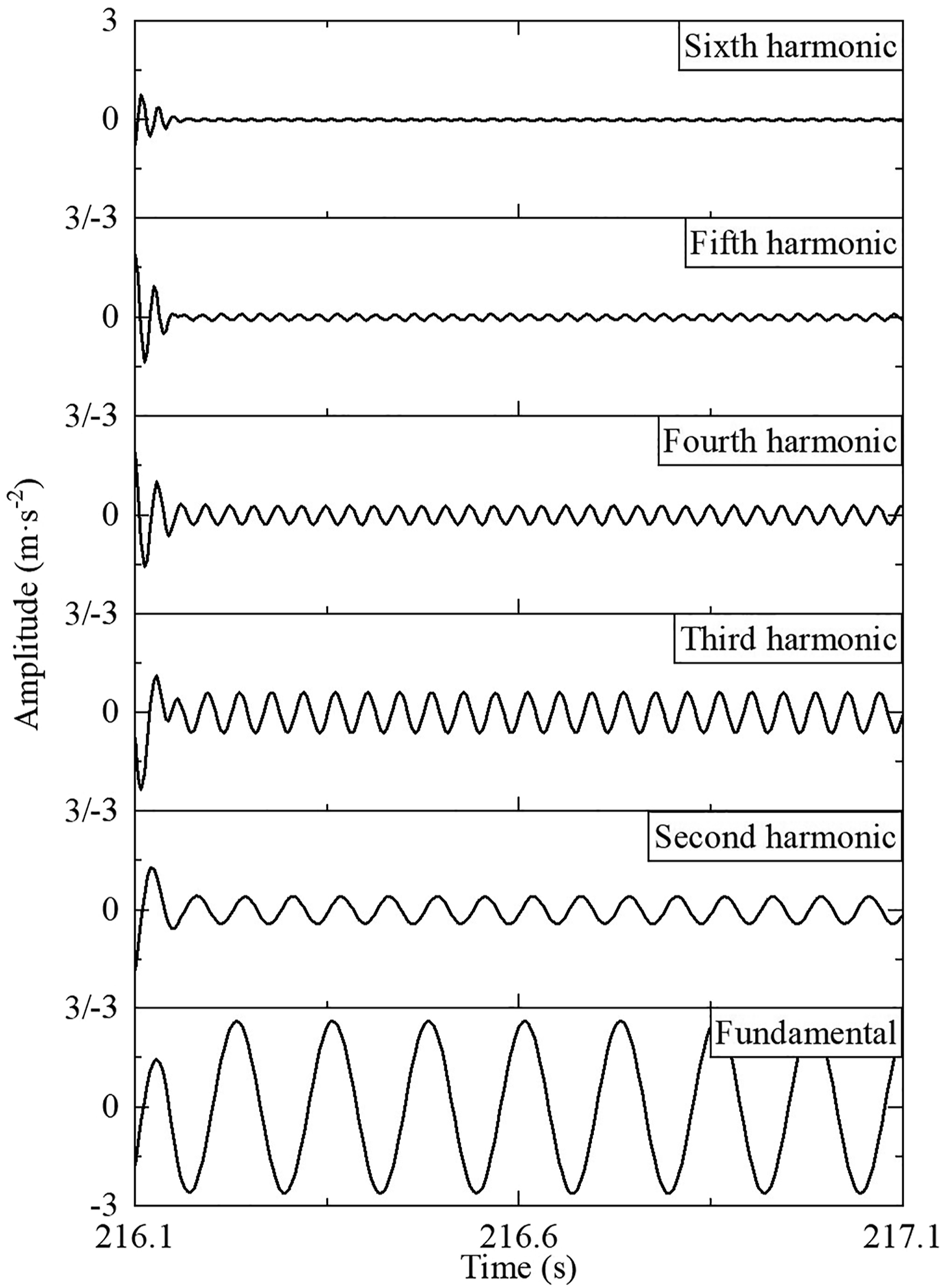
6. Conclusion
Electro-hydraulic shaking table is widely used in vibration tests of the large displacement and large exciting force. Due to the nonlinearities in the system, the shaking table’s output will inevitably produce signal distortion when it is subjected to sinusoidal excitation. This is harmful to the normal operation of the electro-hydraulic shaking table. The purpose of this paper is to design an acceleration identification strategy to accurately and quickly identify the high-order harmonics in the response signal and improve the control precision of the electro-hydraulic shaking table.
In this paper, to achieve this objective, the SA-PSO algorithm was designed for harmonic identification of the sinusoidal shaking response. First, the SA algorithm and PSO algorithm were separately applied to the harmonic identification. Then, the experimental results show that the SA algorithm has high identification accuracy, and the PSO algorithm has high identification speed. Therefore, the SA-PSO algorithm introduced the PSO algorithm into the internal circulations of the SA algorithm. The SA-PSO algorithm can combine the advantages of the 2 algorithms. After comparing the results of harmonic identification of the SA algorithm, the PSO algorithm, and the SA-PSO algorithm, the following conclusions can be drawn: (1) When using the SA-PSO algorithm for acceleration harmonic identification, the convergence rate of amplitude and phase of each harmonic is faster, the accuracy is higher, and the overall performance is better than the SA algorithm and PSO algorithm. (2) The SA-PSO algorithm has simple structure and good dynamic tracking ability. It can simultaneously obtain the amplitude and phase of each harmonic, and perform harmonic regeneration. Importantly, the algorithm does not require prior knowledge of the system. (3) The SA-PSO algorithm can identify the acceleration harmonic in real-time. This solves the problem that the FFT needs to be carried out offline. The results obtained by the SA-PSO algorithm can be used as the basis for harmonic suppression.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Foundation of Heilongjiang Province of China (E2018019).