
Abstract
Quasi-zero-stiffness (QZS) isolation systems have demonstrated good performance in low-frequency vibration isolation fields. However, the existing QZS isolation systems with traditional negative stiffness elements cannot support high payloads under miniaturization and simplification. To give some beneficial insights into high loading capacity, optimized structure, and good vibration isolation performance, a novel axially magnetized negative stiffness module (MNSM) is proposed based on the concepts of modularity and expansibility. Concretely, an axially magnetized negative stiffness unit (MNSU) is designed as the fundamental building block of MNSM, and the proposed MNSM can be composed of different axially magnetized negative stiffness units (MNSUs) for diversified requirements. To effectively investigate the characteristics of the MNSU, a computationally high efficient equivalent surface current method is developed. As a result, two types of MNSUs with optimized parameters are achieved, and their design procedures are presented respectively. To verify the benefits of the MNSMs, the designed QZS isolator is theoretically modeled and solved with the average method and then verified through the Runge–Kutta method. Through analyzing the isolation systems with MNSMs under different nonlinearities and dynamic parameters, the results indicate that the proposed MNSMs can endow the QZS vibration isolator with a lower resonant frequency, a wider isolation frequency range, and a smaller transmissibility. Additionally, it is also demonstrated that there is an inverse relationship between the complexity of the MNSM structure and the sensitivity of the isolation system.
1. Introduction
With the improved requirements of accuracy, working stroke, loading capacity, and stability in many fields such as aerospace, ship, vehicle seat, suspension, ultra-precision manufacturing, measuring, and others, the demand for low-frequency vibration isolation surges. Theoretically, a linear vibration isolator can only attenuate the vibration from
To overcome the inherent shortcomings of conventional linear vibration isolators, the so-called high-static low-dynamic stiffness vibration isolator (HSLDS-VI) has been the subject of extensive research recently. Generally, HSLDS-VI is constituted by connecting a negative stiffness module with a positive stiffness element in parallel. The combination of low-dynamic stiffness and high-static stiffness in this type of isolator results in a larger isolation frequency range without compromising loading capacity (Carrella et al., 2012). When the dynamic stiffness reaches ultra-low or even zero around the static equilibrium position (Carrella et al., 2007b; Carrella et al., 2009; Gatti et al., 2010; Zhao et al., 2022a; Zhao et al., 2022b), the HSLDS-VI is called the quasi-zero-stiffness vibration isolator (QZS-VI), which is firstly comprehensively introduced by Alabuzhev (1989).
The features of QZS isolator are as described above, and there are numerous mechanisms that can achieve QZS. Depending on the negative stiffness modules (NSM), the QZS-VIs can be broadly grouped into the followings, including oblique-spring type (Carrella et al., 2007a; Carrella et al., 2007b; Carrella et al., 2009; Deng et al., 2020; Lan et al. 2014; Zhao et al., 2021; Zhao et al., 2022a), cam-roller-spring type (Ye et al., 2015; Zhou et al., 2015; Song et al. 2022), Euler bucked beam type (Huang et al., 2014; Liu et al., 2013; Liu et al. 2021a; Lu et al., 2020), disk-spring type (Meng et al., 2015), permanent magnetic type (Carrella et al., 2008; Dong et al., 2017; Wu et al., 2014; Shan et al., 2015; Zheng et al., 2016; Shi et al., 2015; Zhou et al., 2019), and origami structure type (Ishida et al., 2017a; Ishida et al., 2017b; Li and Wang, 2015). In addition, growing attention has been paid to the semi-active or active electromagnetic types for better adaptability and isolation performance (Han et al., 2018; Liu et al., 2019; Pu et al., 2019; Sun et al., 2014; Sun et al., 2020; Xu and Sun, 2015; Zhao et al., 2021b). To achieve negative stiffness, the classic oblique-spring type utilized two pre-compressed springs (Carrella et al., 2007a; Carrella et al., 2007b; Carrella et al., 2009). Lan et al. (2014) designed a lateral adjustment mechanism to adjust the negative stiffness value for a wide range of payloads. Lu et al. (2014) configured the oblique-type QZS isolator as the monostable and bistable isolators and then investigated their isolation performances under harmonic and random excitations. Deng et al. (2020) were inspired by the ability of bird’s multi-vertebral neck to keep head stable and constituted a multi-layer oblique-spring structural QZS-VI. An improved oblique-spring is proposed by Zhao et al. (2021a), which widened the QZS region by increasing the amount of oblique springs. Zhao et al. (2022a) designed a three-pair oblique-spring QZS isolator, which can obtain lower transmissibility under higher displacement excitation. Ye et al. (2015) optimized the classic design for different loading capacity. Song et al. (2022) proposed a parabolic cam-roller QZS-VI, which can deal with larger excitations and possess better isolation performance in comparison with the conventional cam-roller-spring QZS-VI. A QZS-VI based on the Euler bucked beam structure was developed by Liu et al. (2013), and then Huang et al. (2014) explored the effects of system defects on the dynamic characteristics of the isolation system with the Euler bucked beam structure. Lu et al. (2020) designed a circular-ring vibration isolator with highly nonlinear geometric stiffness. By utilizing piezoelectric buckled beams to convert the vibration energy into electrical energy, an improved Euler bucked beam QZS-VI was proposed by Liu et al. (2021a). The Euler bucked beam QZS-VI can simultaneously achieve vibration isolation and energy harvesting. As a recent research hotspot (Ji et al., 2021), origami structures can realize high-static and low-dynamic stiffness through the nonlinear force-displacement relationships generated by the folding deformation of the creases and the bending of the facets (Cheung et al., 2014). And, some improved isolators with origami structures have emerged. (Inamote and Ishida, 2019; Sadeghi and Li, 2019; Yan et al., 2020). Han et al. (2018) designed a semi-active QZS-VI equipped with the adjustable NSM by adopting the electromagnetic asymmetric tooth structure. Pu et al. (2019) and Sun et al. (2020) proposed an electromagnetic spring by making a pair of coil and magnet ring coaxially mounted, and then a semi-active vibration isolator with such multi-layer electromagnetic springs was designed and investigated. By introducing the actuator into the traditional three-spring type QZS-VI, Sun et al. (2014) provided an active QZS-VI based on the delay active control algorithm.
Although the aforementioned passive QZS-VIs have obvious advantages over the linear isolator, and the aforementioned active and semi-active isolators have improved in terms of adaptability and isolation performance. Unfortunately, the limited pre-deformation restricts negative stiffness and loading capacity for the above passive isolators. The negative stiffness of above semi-active or active isolators is realized through electromagnetic effect, which raises the bar for algorithm, sensor, and control system. In summary, such above types are unable to concurrently achieve the miniaturization, structural simplicity, high negative stiffness, and realizability of NSM.
As the focus of this paper, the NSMs made of permanent magnets have the ability to provide large magnetic force in a compact volume and prevent mechanical contact. Moreover, since permanent magnets can be magnetized beforehand, elaborate structures are not required to provide pre-compression or energy. Carrella et al. (2008), Dong et al. (2017), and then Wu et al. (2014) utilized three permanent magnets to construct an NSM. To further simplify the structure with two specially configured permanent magnets, Shan et al. (2015) and then Zheng et al. (2016) proposed HSLDS isolators based on the NSMs composed of a pair of radial magnetized permanent magnetic rings. The magnetic rings in the above study were constructed by arranging several blocks of tile permanent magnets in a circle, which brought difficulty in installation for the strong repulsive force exerted between two neighboring tile magnets. Consequently, the space between the adjacent tiles had to be increased, and the low-space utilization rate would decrease the magnetic performance. Differently, it is easier to fabricate the axial magnetized permanent magnet rings. Shi and Zhu (2015) proposed a magnetic negative stiffness damper, which was composed of such two concentric rings. Then, Zhou et al. (2019) constituted a similar physical prototype. However, the related magnetic stiffness was obtained based on the equivalent magnetic charge method. It is complex and time-consuming for calculation due to quadruple integral, which is not conducive to the further investigation. Moreover, the concepts of modularity and extensibility have not been introduced into the design of the NSM, which limits its application prospects. Most important, the mathematical modeling of the QZS-VI with such extensible NSM has not been formulated, and the associated vibration isolation mechanism needs to be explained urgently.
Taking into consideration the technical constraints of existing QZS-VIs, this paper primarily aims to present the theoretical modeling and analysis of a quasi-zero-stiffness vibration isolator equipped with extensible and axially magnetized negative stiffness modules (MNSMs). Significantly, the modularity and extensibility are improved. A magnetized negative stiffness module (MNSM) can be made up of numerous identical or distinct magnetized negative stiffness units (MNSUs) depending on the loading requirements and applications, with a single magnetized negative stiffness unit (MNSU) serving as the MNSM’s fundamental building block. The remainder of this paper is structured as follows. In Section 2, the geometrical parameter effects of the axially MNSU on the magnetic negative stiffness characteristics are deeply analyzed. Section 3 presents the design procedures of MNSMs. In Section 4, the mathematical modeling of the designed magnetic quasi-zero-stiffness vibration isolator is established and solved, and then some discussions about the dynamic characteristics of the isolator are given. Section 5 concludes the work.
2. The model of MNSU
The MNSU is designed as fundamental building block to build the MNSM under the modular concept. Therefore, it is necessary to model the MNSU and investigate its characteristics.
2.1. The structure of MNSU
Figure 1(a) shows the structure and parameters of the MNSU, which is composed of a moving inner permanent magnetic ring (IPMR) and a fixed outer permanent magnetic ring (OPMR). The parameter meanings are given in Appendix A. The material of the MNSU is Nd-Fe-B. Axially magnetized negative stiffness unit (MNSU): (a) the model of the MNSU and (b) the MNSU established in COMSOL.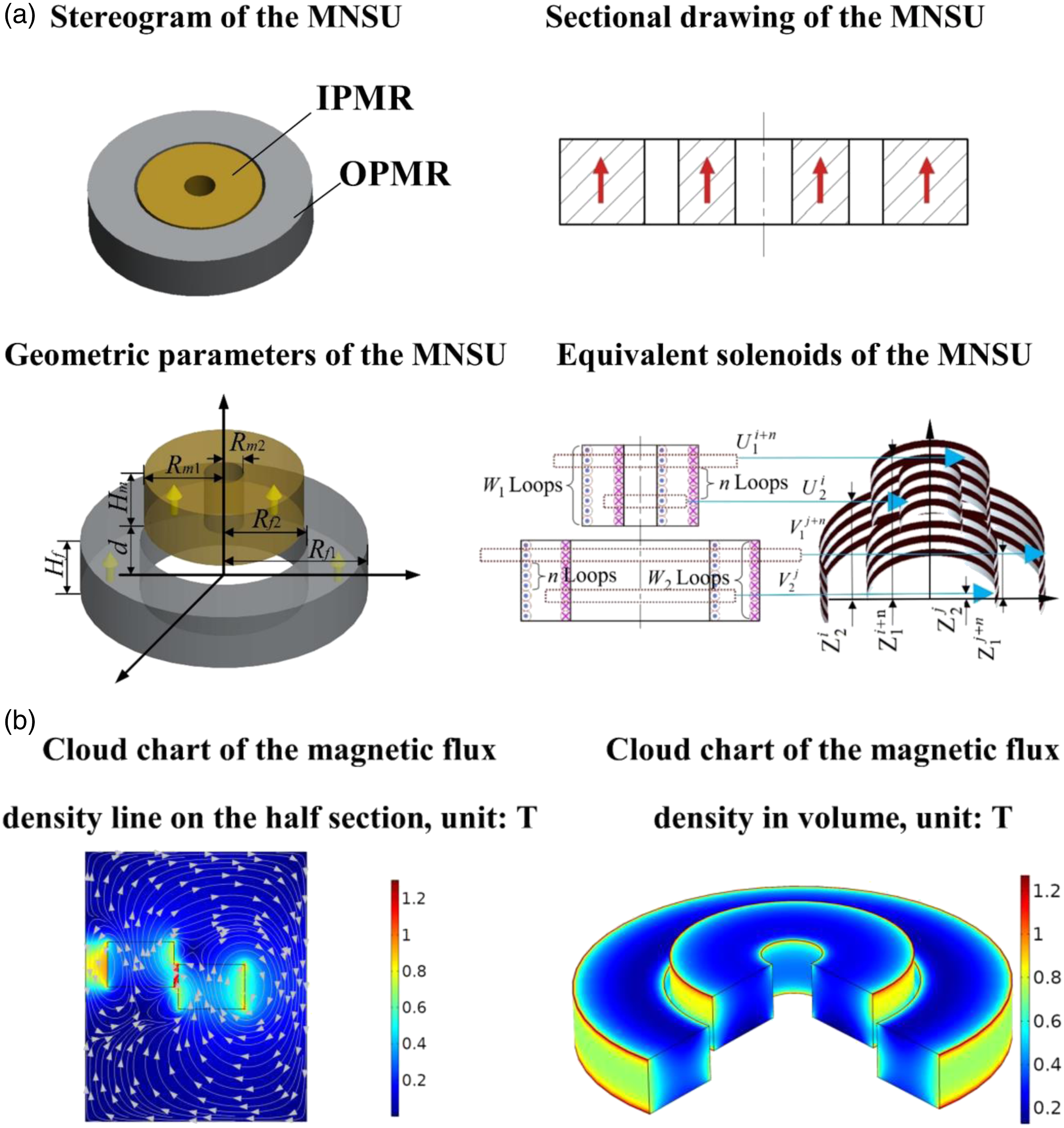
According to the equivalent surface current method, the MNSU are equated into four different solenoids and shown in Figure 1(a).
The external and internal equivalent solenoids of the IPMR are, respectively, denoted as U1 and U2. U1 and U2 have the same turn numbers W1 and the identical current I1.
The external and internal equivalent solenoids of the OPMR are, respectively, denoted as V1 and V2. V1 and V2 have the same turn numbers W2 and the identical current I2.


2.2. Analytical model of magnetic force and stiffness
In this paper, a computationally high efficient equivalent surface current method for calculating the magnetic force of the MNSU is derived.
Traditionally (Liu et al., 2021b; Zheng et al., 2016; Zhou et al., 2019), the expression of The calculating model of electromagnetic force between a pair of equivalent coils: (a) traditional and (b) the improved.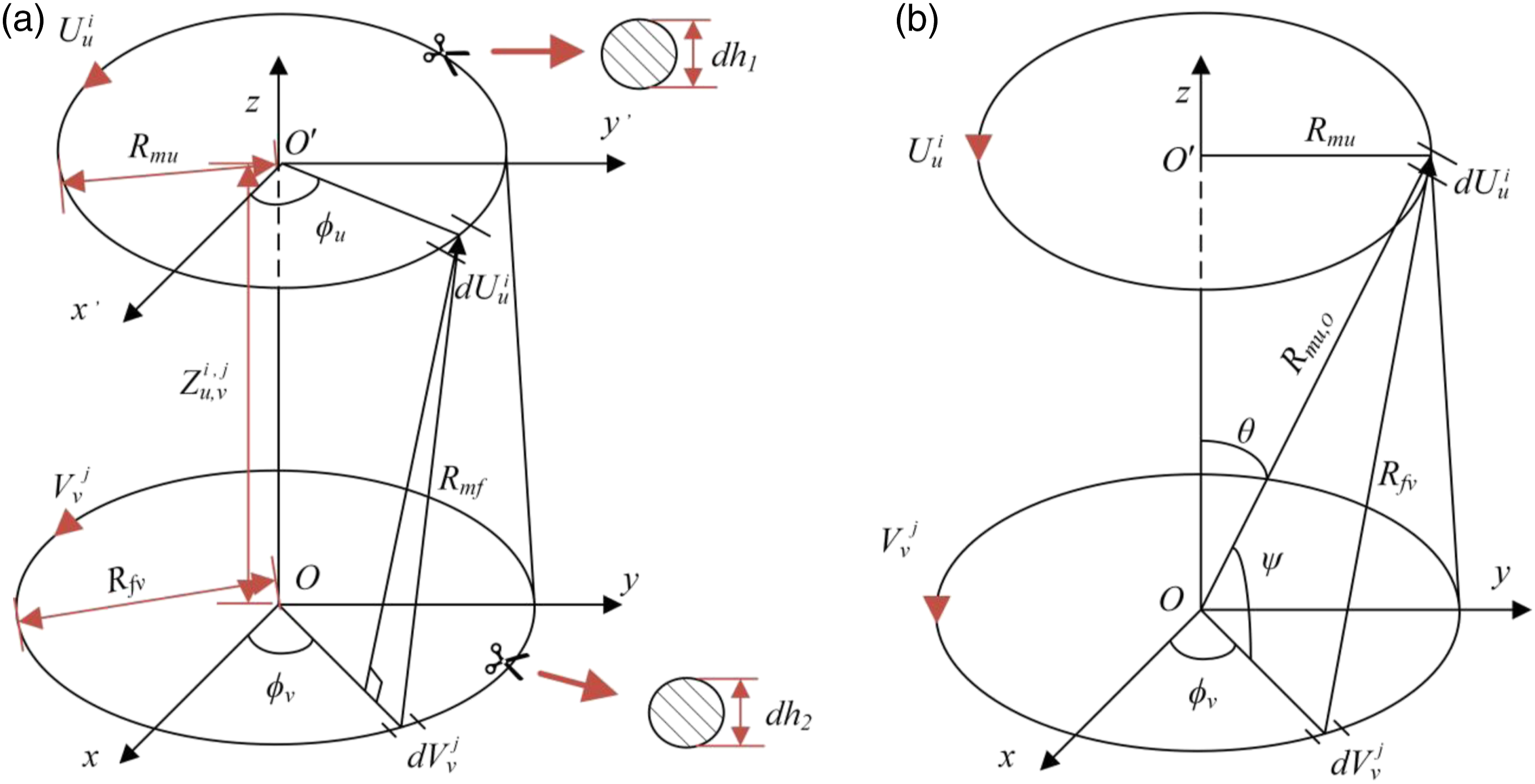

By superimposing Calculated results of the MNSU*: (a) the magnetic force and (b) the magnetic stiffness.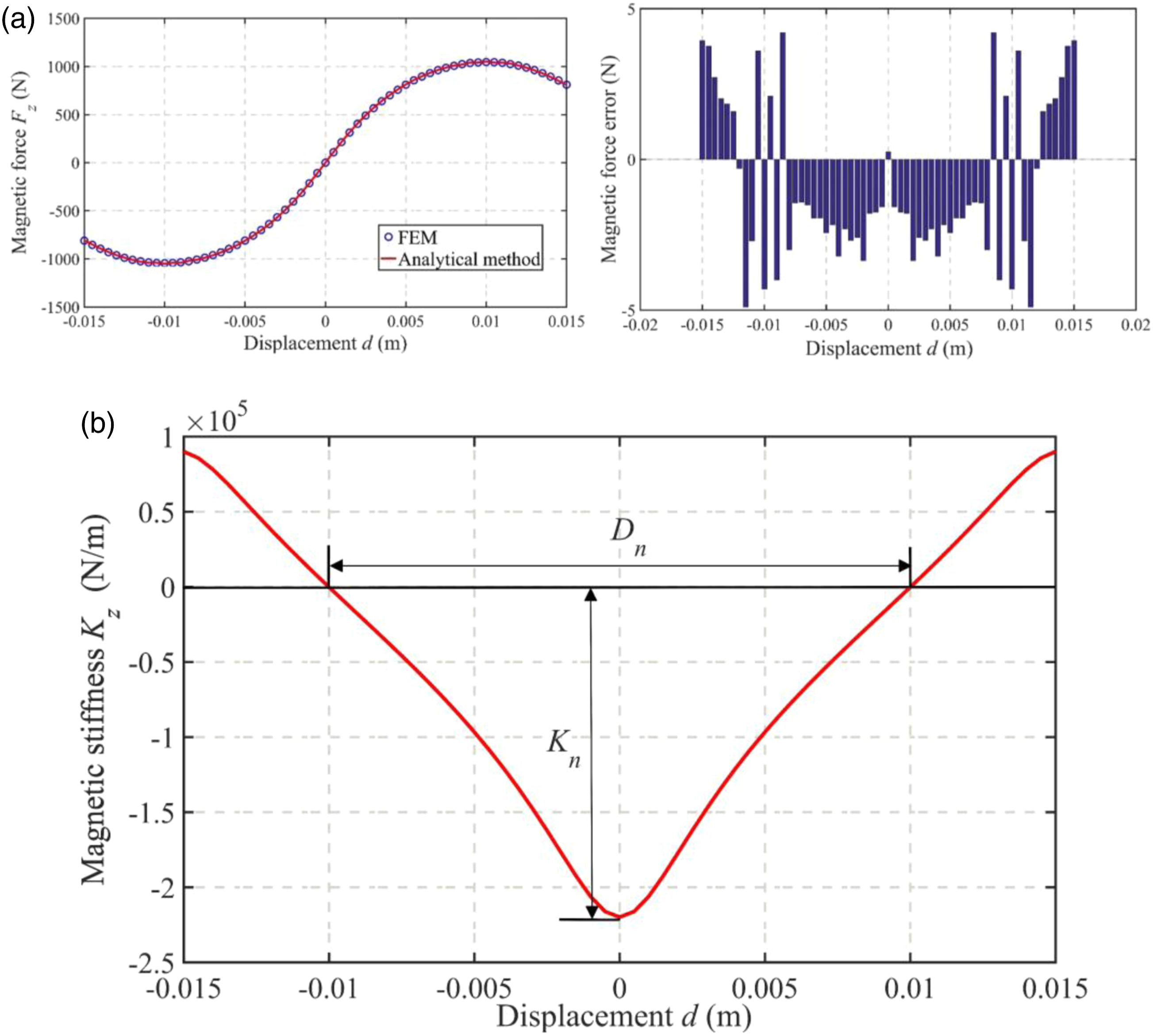

2.3. Effects of geometric parameters of the MNSU on the stiffness characteristics
The geometric parameters of the MNSU are normalized as follows
2.3.1. Effects of the height on the magnetic stiffness characteristics
To study the effects of the height, when keeping the radial thicknesses of the IPMR and the OPMR identical and constant, the gap unchanged, and the cases in Figure 4 and Figure 5 are separately discussed and presented. Effects of the height: (a) when heights remain identical and (b) when the height difference keeps constant. Effects of the height when the height of the inner permanent magnetic ring remains unchanged and the height of outer permanent magnetic ring varies.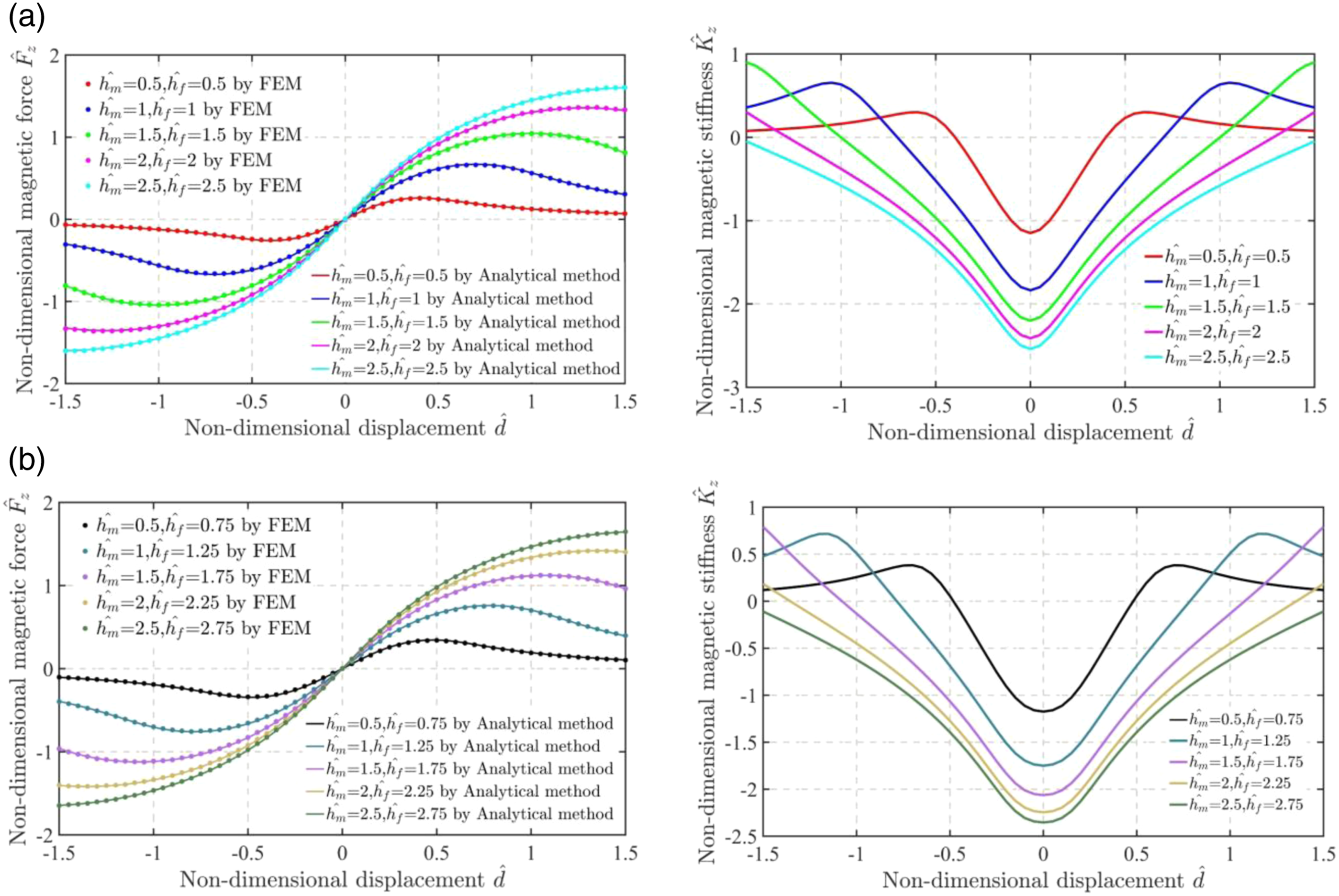
As displayed in Figure 4, when the MNSU’s heights remain identical or the height difference keeps constant, the increase in height can result in higher K n and wider D n . However, there is a limitation for the improvement of the above performance.
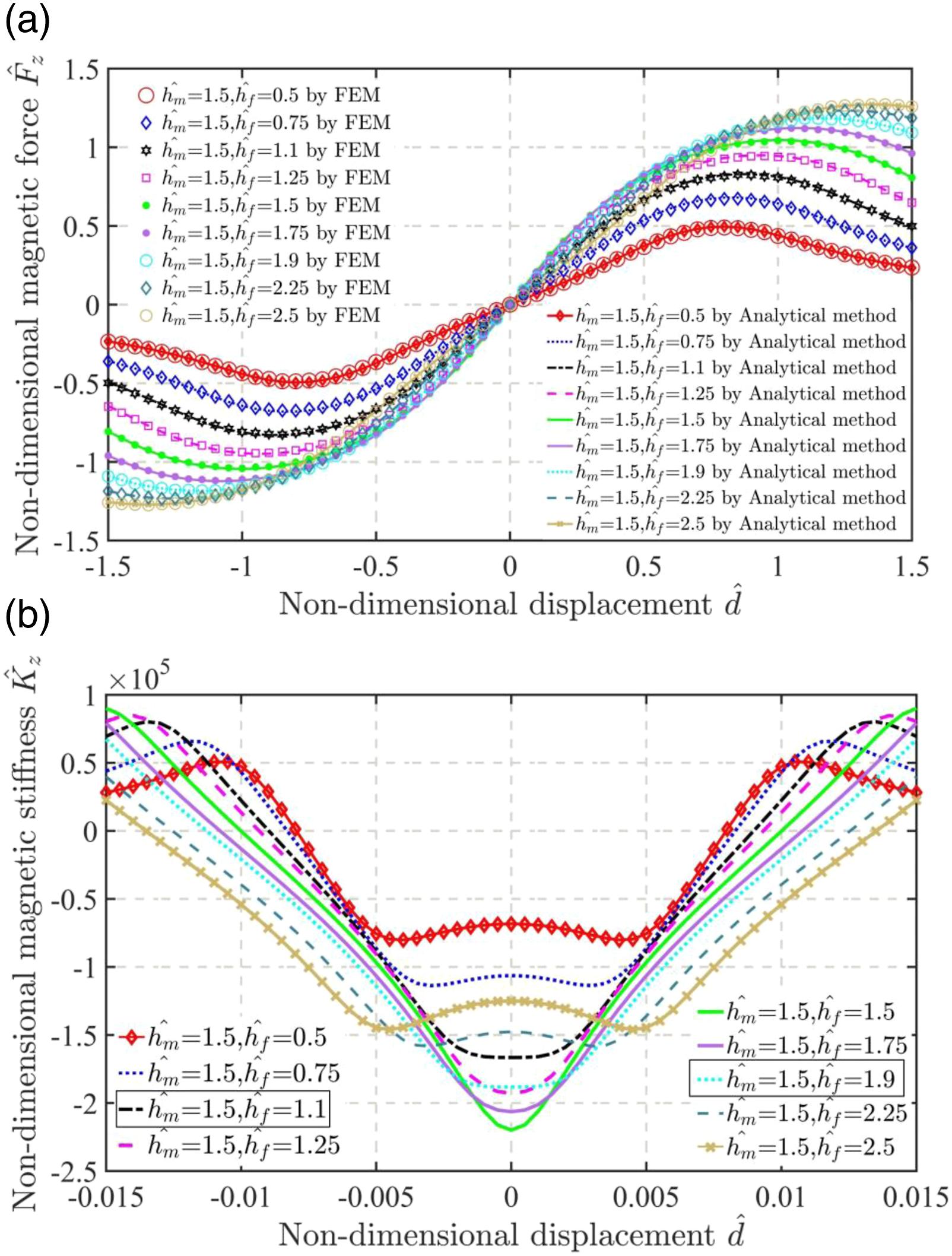
When the height of the IPMR remains unchanged and the height of OPMR varies in Figure 5, what is striking is the alternative occurrences of softening and hardening stiffnesses around the equilibrium position. At first, the softening stiffnesses gradually change to hardening stiffnesses. When the heights of two magnetic rings equals, K n reaches the highest. After that, the increased height makes the curves soften again.
It is worth noting that the strong nonlinear stiffness is detrimental to the isolation performance when K
n
reaches the highest. Furthermore, the curves with the least nonlinear and relatively high negative stiffness near equilibrium positions (when
2.3.2. Effects of the radial thickness on the magnetic stiffness characteristics
To study the effects of the radial thickness, in the case of keeping the height of the magnetic rings identical and constant, the gap unchanged and the associated conditions are discussed and presented in Figure 6.
From Figure 6, larger radial thickness results in higher K
n
and wider D
n
. However, the varying rates of above properties get slight gradually with increasing radial thickness, which is specifically obvious when the thickness of IPMR remains unchanged and the thickness of OPMR varies. After crossing the critical point that Effects of the radial thickness.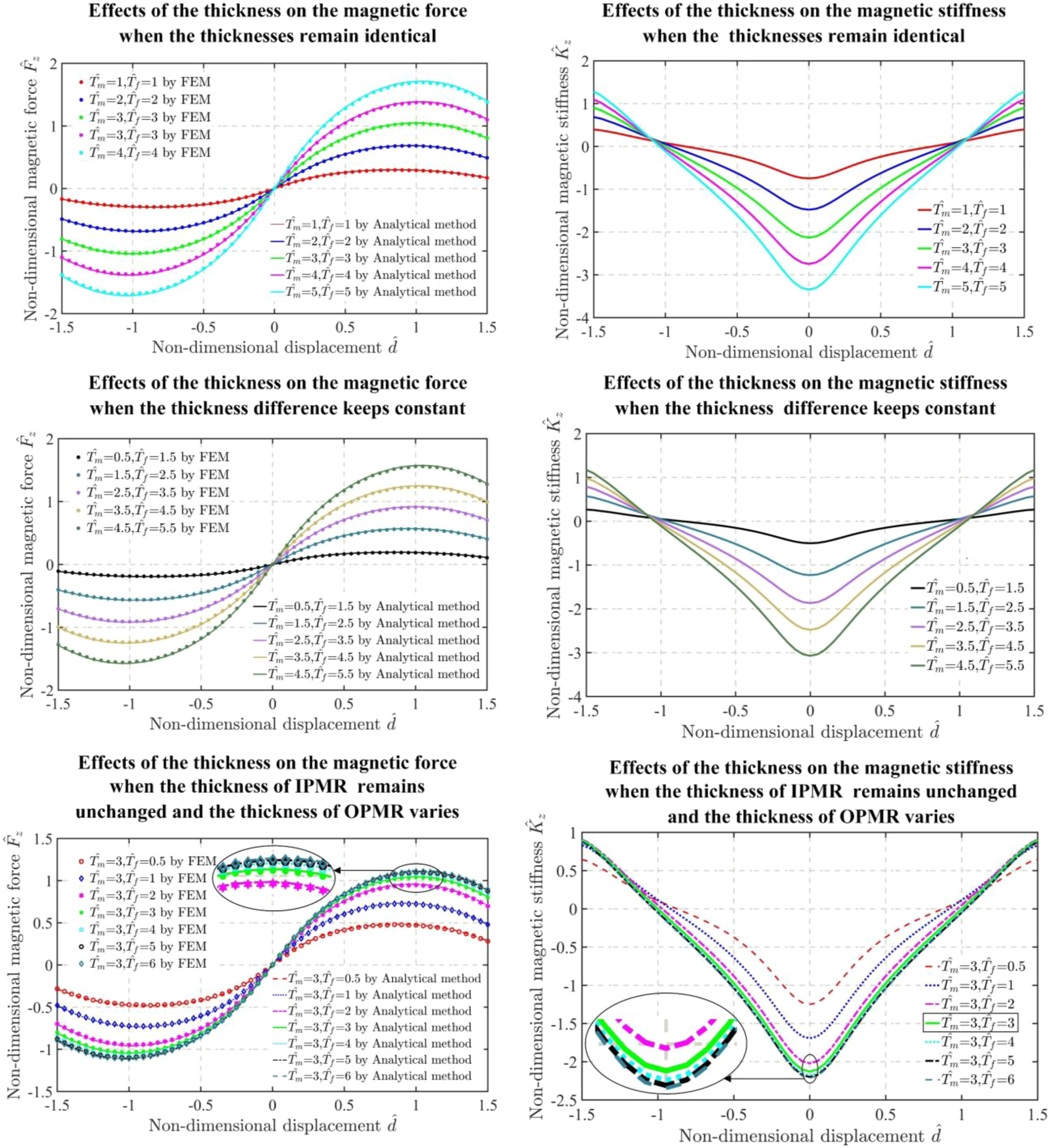
2.3.3. Effects of the gap on the magnetic stiffness characteristics
From Figure 7(b), as the gap between the IPMR and OPMR gets narrow, K
n
keeps decreasing. However, considering the manufacturing and practical application, it is not necessary to keep reducing the gap for higher K
n
on the premise of guaranteeing the payload. Effect of the gap: (a) the magnetic force and (b) the magnetic stiffness.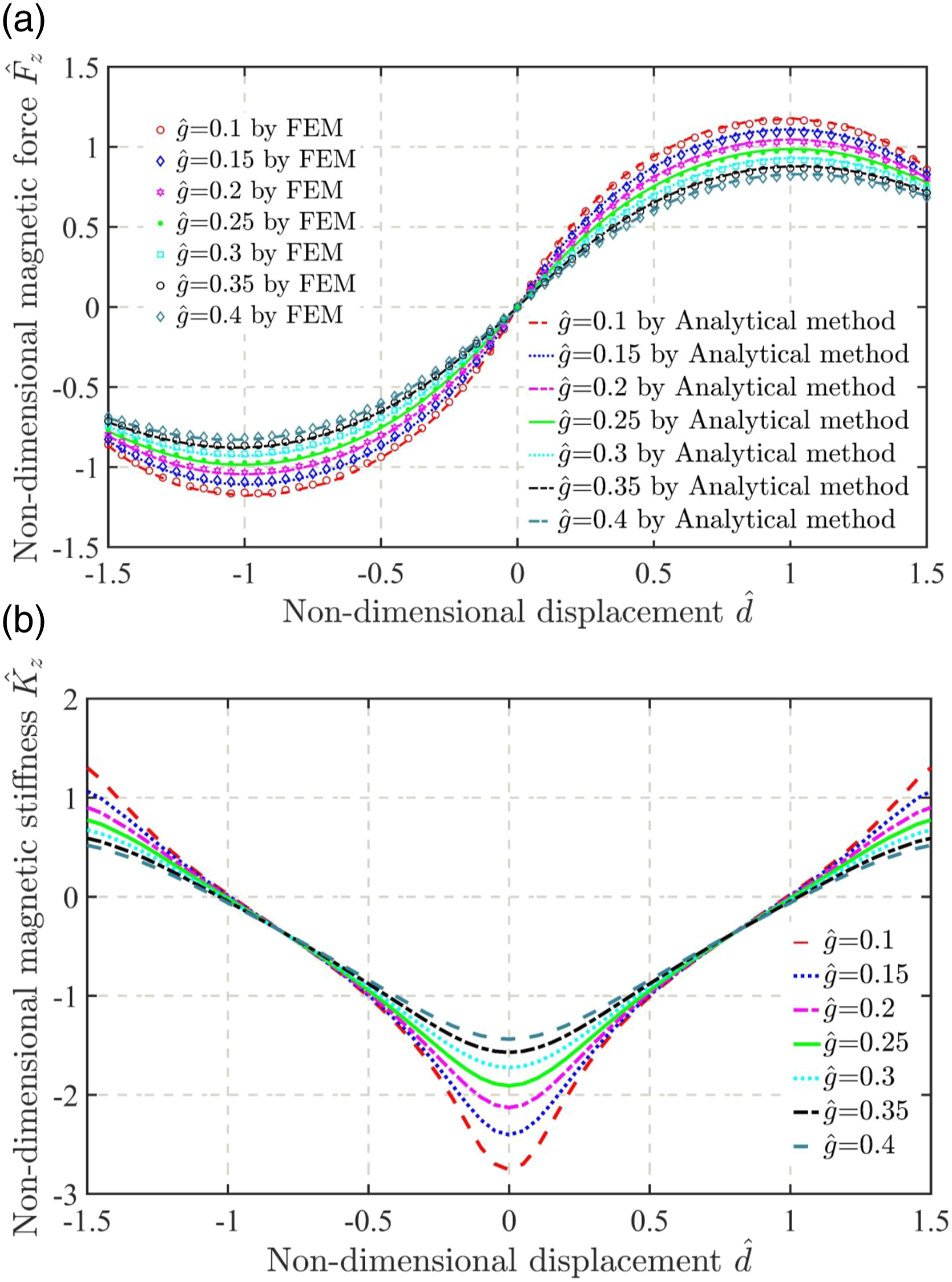
3. Design of the MNSM
3.1. The design method of the MNSM
Three principles have been proven effective to direct the design of the NSM performance near the equilibrium position (Zheng et al., 2016), which refer to (a) the value of negative stiffness; (b) the linearity of the negative stiffness around the static equilibrium position; and (c) the working stroke with high and linear negative stiffness. Based on that, according to the theoretical analysis in Section 2, the MNSU with the ideal negative stiffness is achieved when
3.2. The design procedures of different MNSMs
3.2.1. The design procedure of the MNSM composed of individual MNSU
When K
n
of the MNSU with Axially magnetized negative stiffness module (MNSM): (a) the design procedure of MNSMs and their negative stiffness varying processes and (b) the structure of the MNSMs with optimized parameters.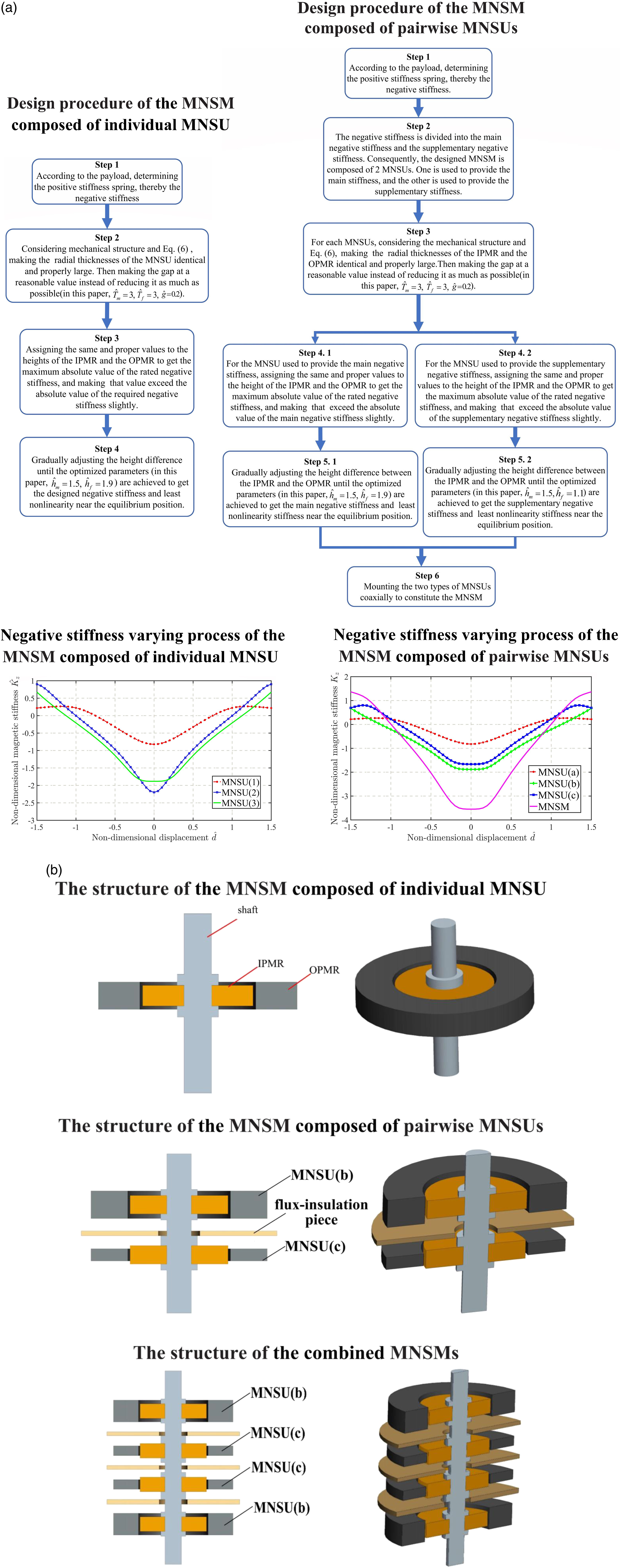
3.2.2. The design procedure of the MNSM composed of pairwise MNSUs
For better vibration isolation performance and larger targeted payload, an extensive MNSM can be designed as a combination of the MNSUs with
The systematic design procedure and negative stiffness varying process of the MNSM composed of pairwise MNSUs are, respectively, exhibited in Figure 8(a). Concretely, MNSU(a) is initially set with arbitrary parameters. MNSU(b) and MNSU(c) are, respectively, used to provide the main negative stiffness and the supplementary negative stiffness. Variations from MNSU(a) to MNSU(b) and from MNSU(a) to MNSU(c), respectively, correspond to the process from step 3 to step 5.1 and that from step 3 to step 5.2. The MNSM is constituted by mounting MNSU(b) and MNSU(c) coaxially. The geometric parameters of the above MNSUs are listed in Table E.1. The structure of the MNSM composed of pairwise MNSUs is displayed in Figure 8(b).
As described above, the two basic combinations are introduced. Further, multiple such MNSMs can be mounted flexibly for higher performance. The structure of the combined MNSM is illustrated in Figure 8(b). It should be noted that the compact structure is conducive for the miniaturization of the isolator with such NSM. Each designed MNSU has a relatively large ratio between the diameter and height, which cannot cause instability when multiple MNSUs are axially mounted.
As shown in Table E.2 of Appendix E, the MNSMs have advantages over some existing NSMs in various aspects. The above performance endows the MNSM extensive prospects in the field of low-frequency vibration isolation under high payload, such as aerospace, ship, machine tool, and others.
4. Dynamic modeling of the magnetic quasi-zero-stiffness vibration isolator (MQZS-VI)
4.1. Modeling of the MQZS-VI
Figure 9 presents the model of the MQZS-VI with the MNSM. A quasi-zero-stiffness isolator equipped with the extensible and axially magnetized negative stiffness modules.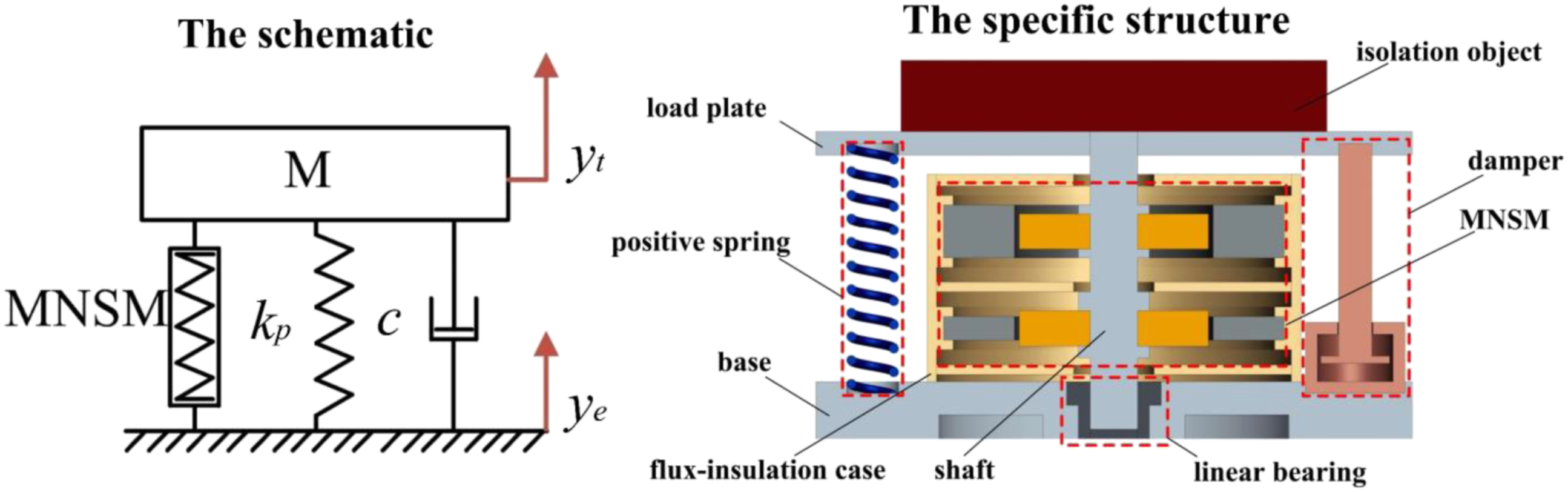
4.2. The dynamic equation
The dynamic equation of isolation system is given

4.3. The approximation of the magnetic force
The expression of the magnetic force in equation (5) can be fitted as a multiple degree polynomial by least squares criterion in equation (8) for computation simplicity The fitting results of the MNSUs’ magnetic forces.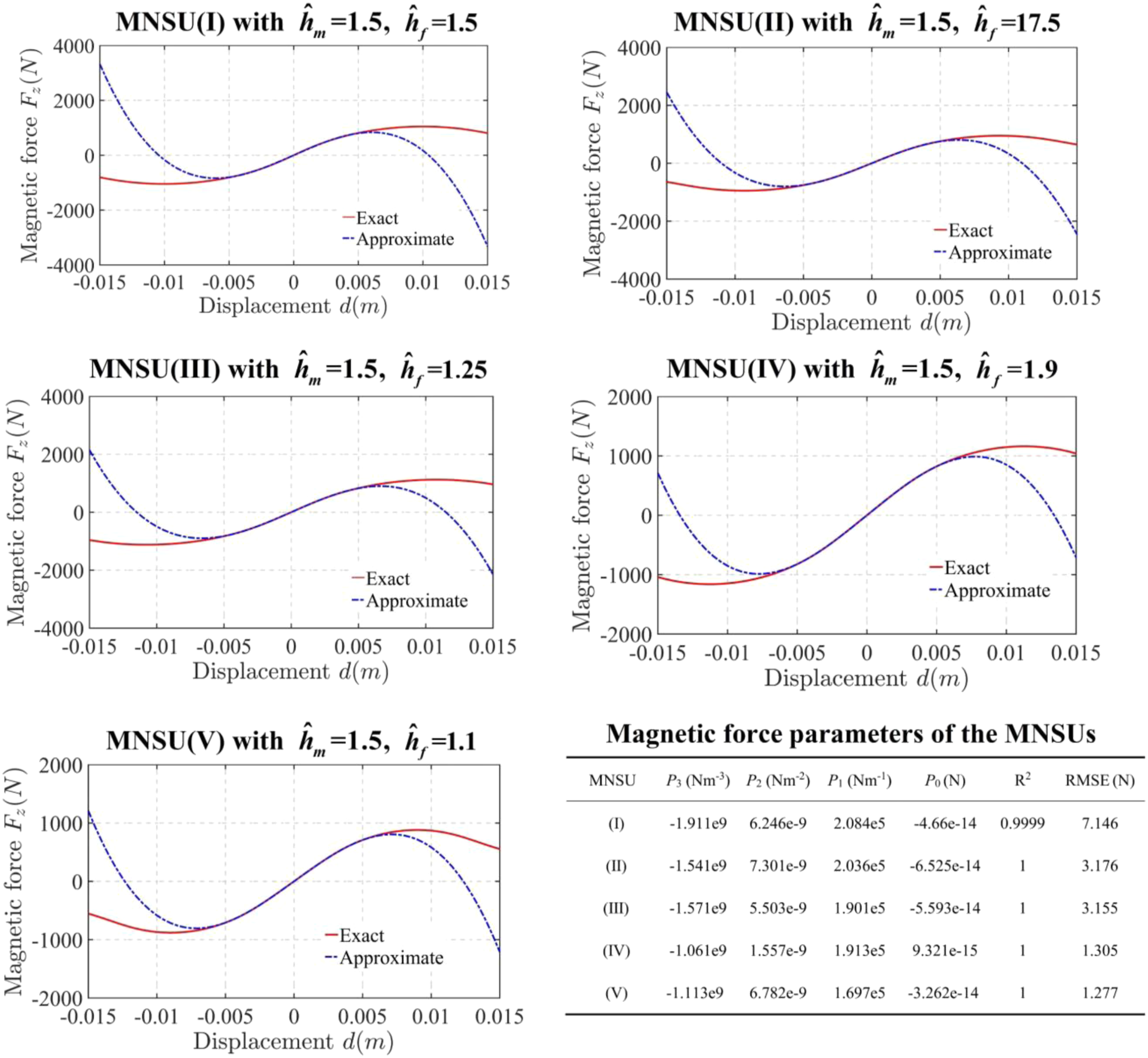

4.4. The solution of the dynamic equation
To solve the equation, the following non-dimensional variables are introduced

The dynamic equation can be written in the non-dimensional form as


Applying the average method to solve equation (9) and rearranging the equation as

By introducing ε and σ to the right of equation (11), the equation can be further rewritten as

Assuming the steady-state response as follows


Thus, taking the derivative of equation (20) and equation (21) gives


Because equation (21) and equation (22) are equal, thus





After calculation, it gives



By combining equation (20), equation (21), equation (22), equation (23), and equation (24), equation (22) and equation (23) can be simplified as follows


In the case ρ′=0 and β′=0, it represents that the solution of equation (11) is a steady periodic motion; therefore
Considering

It can also be expressed as

Equation (28) can be transformed as a quadratic polynomial equation about ω2

A resonance peak occurs with ρ
max
at ω
max
when ω1 = ω2, which gives
It suggests that the ρ max is only related to ζ.
4.5. Stability of the isolation system
To investigate the stability of the system, a small interference is imposed to the steady-state response as follows

Submitting equation (32) to equation (25) and equation (26), it gives
Combining equation (27), the equations can be transformed as
The eigen equations corresponding to equation (34) are
According to Lyapunov’s first approximate theory, the case that A > 0 and B > 0 is a sufficient condition for the gradual stability of the singularity
4.6. Transmissibility
The displacement transmissibility is a key index to describe the vibration isolation performance of the isolator under base excitation.
The absolute displacement response of the isolated object can be obtained as



Thus

4.7. The solution verification
Taking the QZS isolation system with the MNSM composed of MNSU(I) as the example, the correctness of above analytical solutions is verified by comparing with the numerical solutions of Runge–Kutta method when ζ = 0.0896, Ω = 31.6228 (k
p
= 3e5N/m, M = 300 kg, c = 1700 Ns/m), and Y = 0.002 m. It shows a good agreement between two types of solutions in Figure 11. The comparisons between the analytical solutions and the numerical solutions.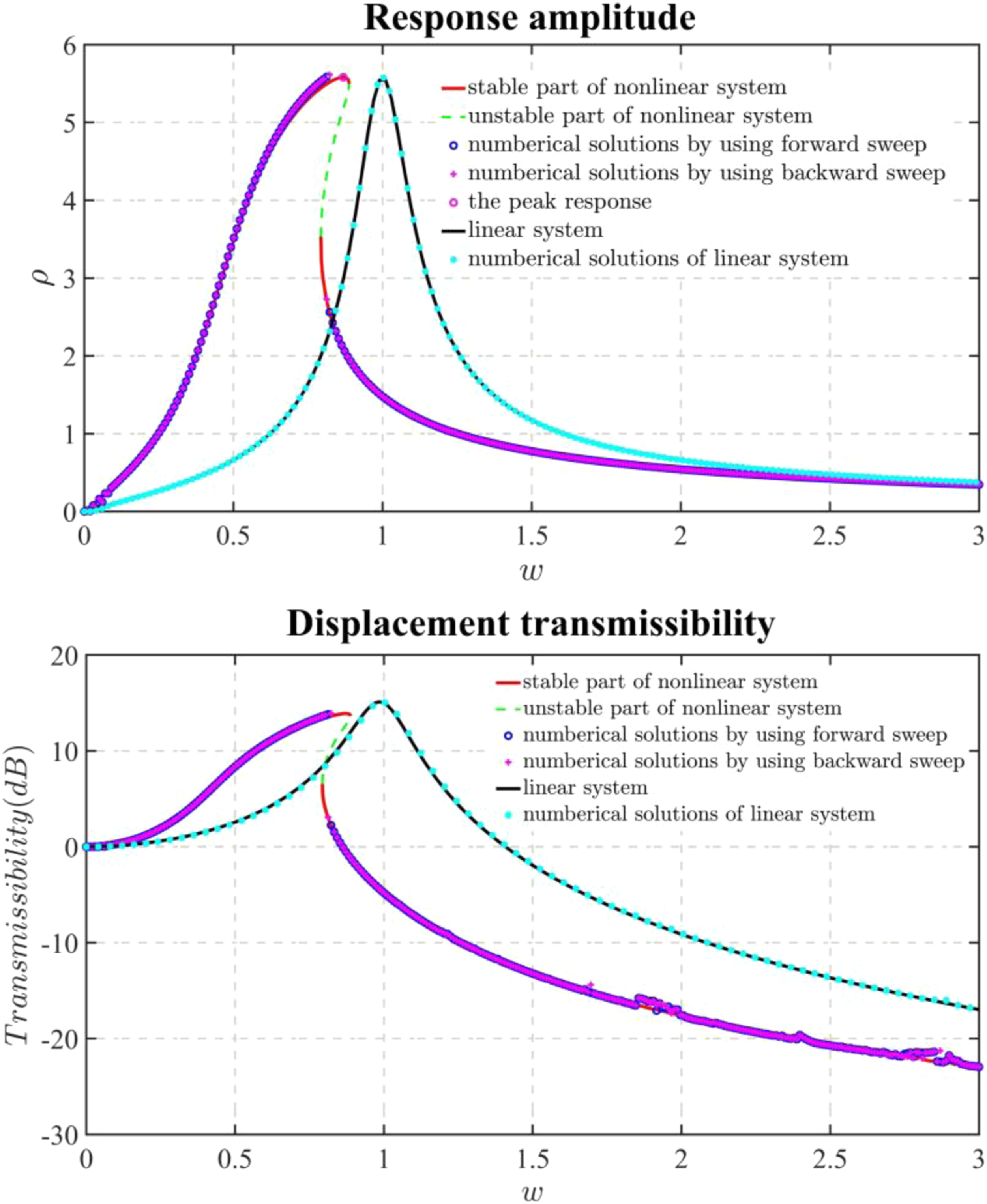
5. Dynamic analysis of the magnetic quasi-zero-stiffness vibration isolator
5.1. Nonlinearity effects on the isolation systems with different MNSMs
It can be drawn from equation (8) that the stiffness force consists of the magnetic force and the linear stiffness force. The nonlinearity is defined as the ratio of the nonlinear and linear parts of the stiffness force in equation (40). The MNSM composed of MNSU(n) is named as MNSM(n), n = I, II, III, and IV. The negative stiffnesses of different MNSMs and the nonlinearities of the isolation systems with different MNSMs are illustrated in Figure 12 The characteristics of different MNSMs.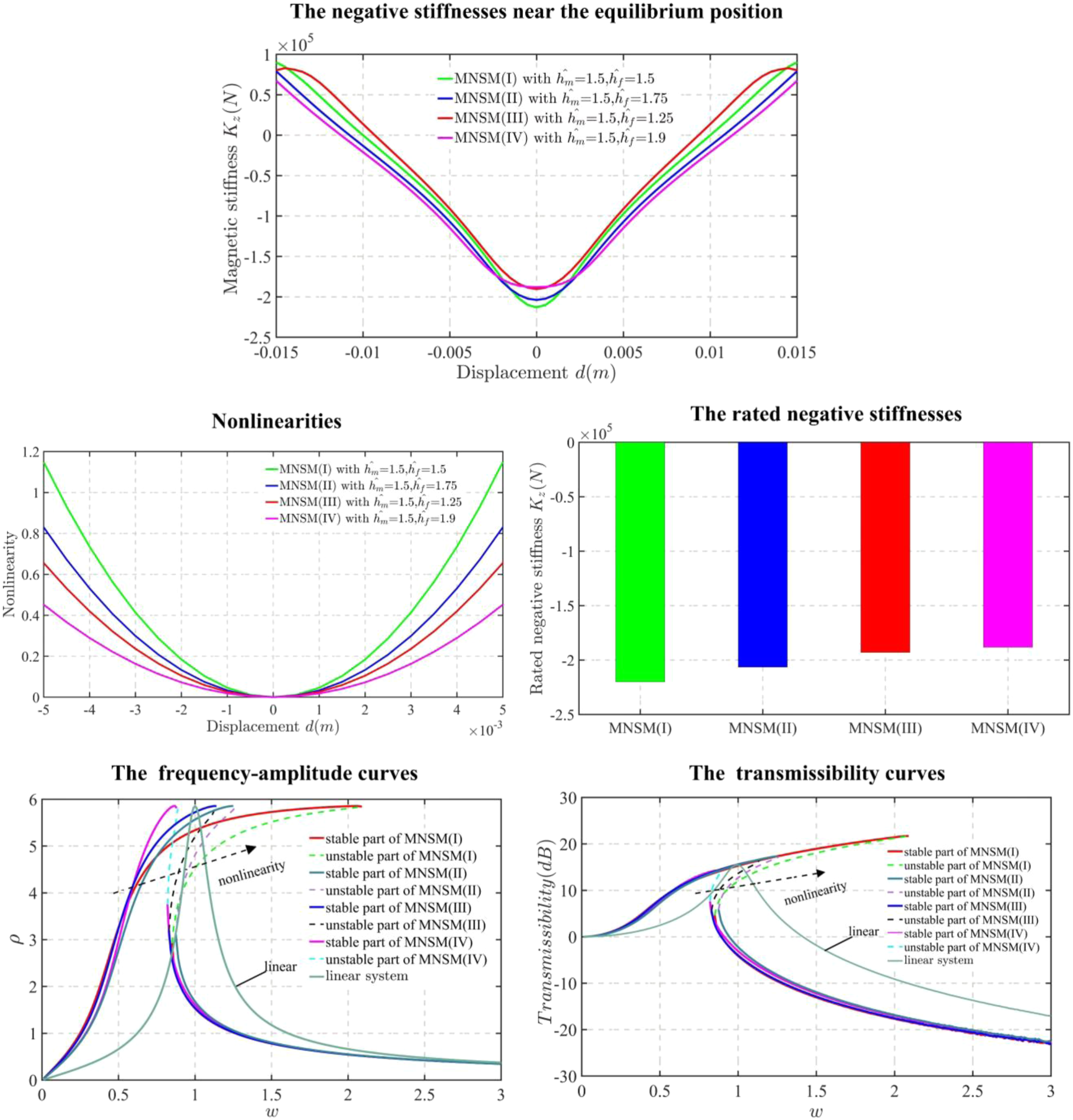

From the QZS-VI with MNSM(II) to that with MNSM(IV), the nonlinearities are not prominent. Benefitting by the implementation of QZS, their isolation performances get improved in comparison with the linear system. The resonant and effective isolation frequencies are notably reduced in turn, so do their peak transmissibilities. As to MNSM(Ⅰ), even its upper and lower branches of transmissibility curves are all conspicuously lower than that of the equivalent linear system under the same frequency. Unfortunately, the vibration isolation performance steadily deteriorates in terms of all aspects as a result of the growing nonlinearity. That is because the increased nonlinearity exacerbates jumping phenomenon, and the effective isolation behavior cannot occur in the frequency range within the unstable region. Instead of the frequency when the transmissibility curve is intersecting 0 dB line, the effective isolation frequency changes to the jump-down frequency and gets enlarged. Besides, the transmissibility peaks at the jump-down frequency, which rises strikingly in comparison with the linear system.
Contrary to the superficial sense that higher K n leads to better isolation performance, although the absolute values of K n increase monotonically from MNSM(IV) to (I), the resonant frequency and the peak transmissibility keep increasing because of the increased nonlinearity. Among the MNSMs, only the resonant frequency and peak transmissibility of MNSM(IV) with the least nonlinearity is lower than that of the equivalent linear system.
As shown in the last sub figure of Figure 10, the value of P2 is close to 0. Both the absolute values of P1 and P3 increase from MNSM(IV) to (I). According to equation (40), the nonlinearity η can be seen as
5.2. Parameter effects on the isolation system with different MNSMs
To analyze the dynamic response, equation (28) can be transformed to equation (41). According to the Descartes rule of signs, equation (41) has one or three solutions. When M and k
p
remain constant, since the sign of P3 is negative, the solution number depends on P1 and ω
e
. Namely, the MNSM structure and the excitation frequency

Consequently, when
5.2.1. Effects of damping ratio
When investigating the damping effects on the isolation system with different MNSMs, setting Ω = 33.8062 (k p = 4e5N/m, M = 450 kg) and Y = 0.004 m. c varies from c1 to c4 (c1 = 5000 Ns/m, c2 = 4500 Ns/m, c3 = 4000 Ns/m, c4 = 3500 Ns/m). Correspondingly, ζ varies from ζ1 to ζ4 (ζ1 = 0.1863, ζ2 = 0.1677, ζ3 = 0.1491, ζ4 = 0.1304). The MNSM(VI) is composed of MNSM(IV) and MNSM(V).
According to equation (31), the same ζ leads to the same ρ
max
for both QZS and linear isolation systems. ω
max
of the QZS isolation system depends on the MNSM structure and ζ. For the linear isolation system, ω
max
=1. The variations of ω
max
with ζ for different isolation systems are presented in Figure 13(a). Substituting ω
max
into equation (31), the peak transmissibilities of the QZS and linear isolation systems are, respectively, achieved in equations (42) and (43). From above, the peak transmissibility of the proposed QZS isolation systems is related to the MNSM structure, ζ and Y, while that of the linear isolation systems only depends on ζ. The variations of peak transmissibility with ζ for different isolation systems are described in Figure 13(a) Effects of parameters on different isolation systems: (a) damping ratio and (b) excitation.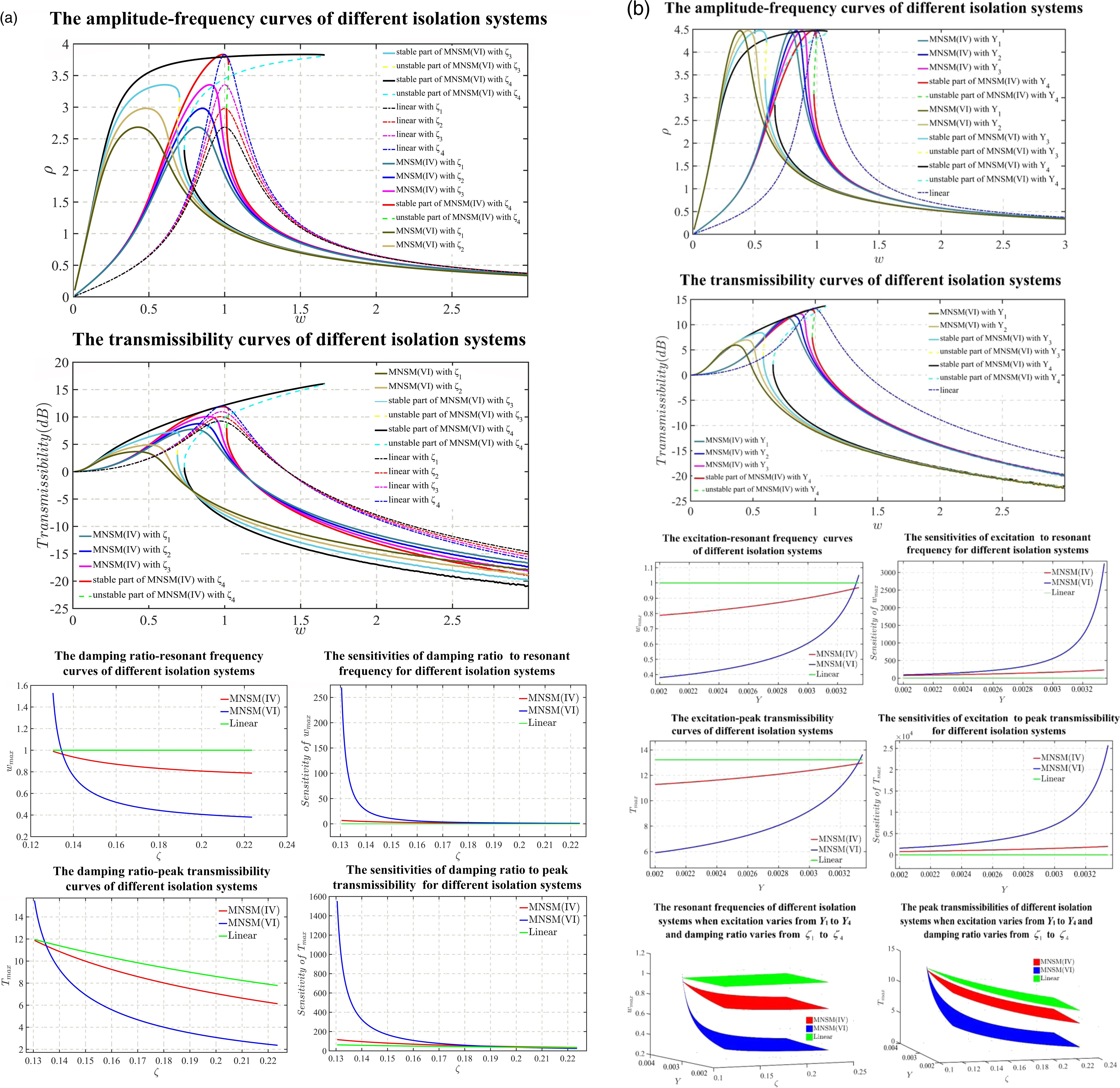


However, as ζ decreases to ζ4, an obvious jumping phenomenon occurs with a sudden increase at ω max when adopting MNSM(VI), which results in a large jump-down frequency and a high peak transmissibility. As a result, the isolation system with MNSM(IV) has an enlarged effective isolation frequency with narrow isolation frequency range. Interestingly, the QZS isolation system with MNSM(VI) is not significantly sensitive to ζ. The frequency range corresponding to its unstable region does not expand much with the change of ζ. As a result, the QZS isolation system with MNSM(VI) is superior to the linear system and the QZS isolation system with MNSM(IV) in all aspects.
To some extent, the influence of ζ on the vibration isolation system is very similar to that of nonlinearity mentioned above. The resonant frequency and peak transmissibility monotonically decrease with respect to ζ. It can be drawn that smaller ζ is beneficial to the vibration isolation performance. The structure complexity is positively correlated with its vibration isolation performance, but negatively correlated with the influence of dynamic parameter change.
Concretely, taking the sensitivities of peak transmissibility and resonant frequency to ζ as examples. By differentiating the partial derivatives of equations (31), (42), and (43) with respect to ζ and taking absolute value, the sensitivities of ζ to the resonant frequency and peak transmissibility for different isolation systems are, respectively, achieved in equations (44), (45), and (46). The associated results are displayed in Figure 13(a). The QZS isolation systems with MNSMs have higher ζ sensitivity than linear isolation system, and the amount of the MNSUs that is composing the MNSM is directly proportional to the sensitivity


5.2.2. Effects of excitation amplitude on the isolation system
To explore the influence of Y on the isolation system with different MNSMs, setting Ω=33.8062 (k p = 4e5N/m, M = 450 kg) and ζ = 0.1304 (c = 3500 Ns/m). Y varies from Y1 to Y4 (Y1 = 0.0033 m, Y2 = 0.0029 m, Y3 = 0.0025 m, Y4 = 0.002 m). The amplitude–frequency and transmissibility curves of different isolation systems are illustrated in Figure 13(b).
According to equation (31), ρ max remains constant with same ζ for different isolation systems, and ω max varies with different Y and the MNSM structure. Substituting the relevant parameters into equations (31), (42), and (43), the variations of resonant frequency and peak transmissibility with excitation amplitude for different isolation systems are displayed in Figure 13(b).
Compared with the linear isolation system, the resonant frequency, peak transmissibility, effective isolation frequency, and transmissibility after effective isolation frequency of the QZS system with MNSM(IV) and MNSM(VI) are reduced within most range. When Y changes from Y 1 to Y3, the QZS system with MNSM(VI) has advantages over that with MNSM(IV) in all aspects. However, as the excitation amplitude Y increases to Y4, an obvious jumping phenomenon is triggered with a large jump-down frequency when adopting the MNSM(VI), and the isolation performance deteriorates rapidly. The excitation amplitude Y has less of an impact when adopting MNSM(Ⅵ), and the QZS isolation system with the MNSM(Ⅵ) still outperforms the linear system in all aspects.
Differentiating the partial derivatives of equations (31) and (42) with respect to Y, and then taking absolute value, the sensitivities of Y to peak transmissibility and resonant frequency for different isolation systems are, respectively, expressed in equations (47) and (48). The results are shown in Figure 13(b). It is observed that, contrary to the effect of ζ, the resonant frequency and peak transmissibility monotonically increase with respect to Y. The QZS isolation systems with MNSMs have higher excitation amplitude sensitivity than linear isolation system, and the amount of the MNSUs that composing the MNSM is directly proportional to the sensitivity

Also, Figure 13(b) shows the values of the resonant frequency and peak transmissibility when Y varies from Y1 to Y4 and ζ varies from ζ1 to ζ4. It can be more intuitively seen that the QZS isolation system with MNSM(VI) have better performance than that with MNSM(VI) and the linear isolation system within most range.
6. Comparative studies with the existing QZS isolator
To confirm the advantages of the MNSM, the comparisons of isolation performance between the QZS isolator with MNSM(IV) and that with the magnetized permanent rings under ideal parameters in the literature (Zhou et al., 2019) have been made in Figure 14. When studying the isolation performances under different damping ratios, setting Ω = 89.4427 (k
p
= 4e5N/m, M = 50 kg) and Y = 0.004 m. ζ varies from ζ1′ to ζ3′ (ζ1′ = 0.0894, ζ2′ = 0.1006, ζ3′= 0.1118). When investigating the isolation performances under different excitations, setting k
p
and M unchanged, c = 1000 Ns/m. Y varies from Y1 to Y3 (Y1 = 0.0025 m, Y2 = 0.002 m, Y3 = 0.0017 m). The results indicate that the proposed QZS isolator with MNSM(IV) has a lower resonant frequency and a smaller peak transmissibility, as well as a wider isolation frequency range. The comparisons of the isolation performance between the proposed quasi-zero-stiffness (QZS) isolator with the MNSM and the existing QZS isolator.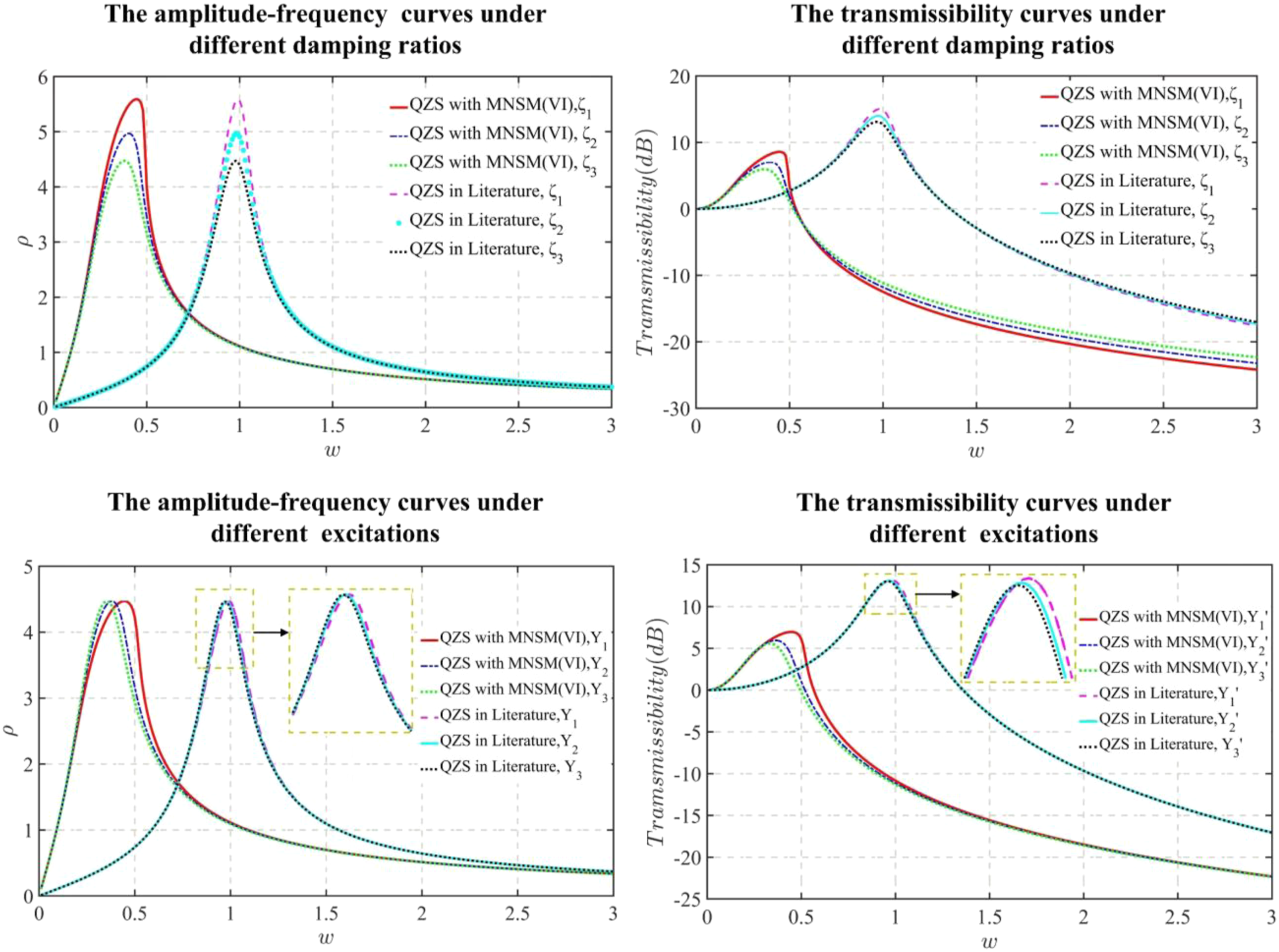
7. Conclusions
This paper presents a study on the quasi-zero-stiffness vibration isolator equipped with extensible and axially MNSMs to improve the low-frequency isolation performance, emphasizing on the mathematical modeling and analysis of the MNSM and isolation system.
Different from traditional passive NSM, the designed MNSM omits compression and simplifies the structure at the guarantee of considerable negative stiffness and work stroking. In addition, the MNSM’s design process incorporates the concepts of modularity and expansibility. An MNSU is designed as a basic component of the proposed MNSM, and the MNSM can be flexibly formed by combining various MNSUs for extensive prospects. The mathematical modeling of the MNSU is established based on the derived computationally high efficient equivalent surface currents method. Through the systematic investigation about the MNSU magnetic negative stiffness, the optimized parameters are achieved. The design procedures of different MNSMs composed of the MNSUs with optimized parameters are presented. The QZS isolation systems with different MNSMs are modeled and analyzed. The theoretical analysis reveals the following: (a) Compared with the linear isolator and the existing magnetized QZS isolator, the MNSMs can endow the isolation system with better isolation performance. (b) Greater nonlinearity is extremely detrimental to the vibration isolation system and even negates the benefits of greater negative stiffness. Higher Kn incurs stronger nonlinearity; thus, a balance needs to be struck between the two. (c) In most cases, the QZS isolation system with the MNSM composed of pairwise MNSUs outperforms that with the MNSM composed of individual MNSU. (d) Smaller Y and larger ζ are more beneficial to the isolation system. There is an inverse relationship between the complexity of the MNSM structure and the sensitivity of the isolation system. In addition, the sensitivities of ζ have an opposite changing trend to that of Y.
Footnotes
Acknowledgments
The authors gratefully acknowledge the support of the National Natural Science Foundation of China (nos. 52225109 & 52271309) and Natural Science Foundation of Heilongjiang Province of China (no. YQ2022E104).
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Natural Science Foundation of China (nos. 52225109 & 52271309) and Natural Science Foundation of Heilongjiang Province of China (no. YQ2022E104).