
Abstract
The dynamic properties of joints, or inter-component connections, are a principal source of uncertainty when modelling complex built-up structures. In the present paper, we propose an interval-based sensitivity analysis (SA) to establish the contribution, or influence, of a structure’s uncertain joint dynamics towards the uncertainty of its coupled admittance. We choose an interval SA as it overcomes the limitations of conventional local and global methods; accuracy and computation efficiency, respectively. Furthermore, it avoids the need for detailed probabilistic data to describe each joint, which is often unavailable. The proposed interval SA is based on the dual formulation of the sub-structuring problem and utilises the Sherman–Morrison formula to factor out the contribution of an individual joint. A complex interval is used to represent the uncertain joint stiffness and damping, and precise bounds on the assembly’s complex admittance (also operational response) are determined following an application specific algorithm. The relative change between input (joint stiffness and damping) and output (complex admittance) interval area is chosen as a sensitivity metric and used to rank order the uncertain influence of each joint. The method is illustrated by numerical example.
1. Introduction
Complex engineering structures (such as vehicles, satellites, domestic products, buildings and more) are built-up from individual components that are joined with connections that rely on frictional contact or other dissipative mechanisms (such as elastomeric elements). These inter-component connections, or joints, are a principal source of uncertainty when modelling such structures.
The types of joints encountered in practical engineering structures are wide ranging, and can include bolted connections, rivets, welds and resilient elements, among many others (Ibrahim and Pettit, 2005). Likewise, their dynamics can vary greatly, from linear spring or beam-like coupling, to non-linear hysteretic, perhaps discontinuous (e.g. frictional), connections (Segalman, 2006; Marques et al., 2016). To accurately model the dynamics of a jointed structure, it is necessary to characterise the dynamics of its constituent joints; experimentally, this is a demanding task (Ren and Beards, 1995, 1998; Čelič and Boltežar, 2008; Noll et al., 2013; Tol and Özgüven, 2015; Roettgen and Allen, 2017; De Oliveira Teloli et al., 2021), often requiring supplementary numerical models (Saeed et al., 2020b,a), and is subject to considerable experimental uncertainty.
In the development or refinement of a numerical model it is important to establish the contribution of each uncertain parameter towards the uncertainty of the model output. This is the role of Sensitivity Analysis (SA) (Saltelli et al., 2008). Methods of SA can be broadly categorised as local or global. Local methods consider linearisation of the model and are appropriate only when low level uncertainty, or weak non-linearity, is present. Based on sampling strategies, global methods consider the entire range of model behaviour and take into account non-linear effects due to large parameter variation.
When dealing with problems of uncertainty, there are two further classifications, or viewpoints: probabilistic or non-probabilistic. Conventional SA is probabilistic, describing uncertain parameters by their probability distributions. One of the principal difficulties in evaluating the uncertainty of a complex system by probabilistic means is the acquirement of detailed statistical input data. In the absence of such data, complex statistical analysis cannot be justified. It is this issue that lead to the development of non-probabilistic, or ‘possibilistic’, analysis methods, which include interval analysis (Rao and Berke, 1997; Moens and Vandepitte, 2004; Muscolino et al., 2014; Łasecka-Plura and Lewandowski, 2017; Lei et al., 2019; Imholz et al., 2020; Zhao et al., 2021), convex modelling (Ben-Haim and Elishakoff, 2013) and fuzzy set theory (Chen and Rao, 1997; Yin et al., 2016). As the name suggests, possibilistic methods are not concerned with establishing the probability of an outcome occurring, rather whether or not is it possible, regardless of its likelihood.
Given the experimentally demanding nature of joint characterisation, it is often challenging to obtain the necessary statistical information to conduct a probabilistic analysis of uncertainty. For this reason, possibilistic analysis methods offer a convenient alternative. In the present paper, we consider, in particular, an interval-based analysis of joint dynamics, where uncertain joint parameters (stiffness and damping) are treated as unknown but bound by upper and lower limits.
Interval-based methods have found numerous applications in the analysis of structural dynamic systems, including interval Finite Element Analysis (Moens and Vandepitte, 2004; Muscolino et al., 2014), eigenfrequency analysis (Chen et al., 2003, 2009), robustness evaluation (Fujita and Takewaki, 2011), quantification of experimental uncertainty (Zhao et al., 2021), inverse force identification (Lei et al., 2019), stochastic response analysis (Muscolino and Sofi, 2012, 2013), among many others. Of particular relevance to the present paper is its application to SA.
In 2007, Moens and Vandepitte introduced the concept of interval sensitivity theory for analysing systems subject to interval-based uncertainty. In contrast to conventional local SA, interval SA is not limited to the first order behaviour of the system understudy. Rather, it considers the entire range of dynamics permissible within the parameter’s interval bounds. In brief, their proposed interval SA considered the relative change in absolute interval widths on the input and the output side of the problem. Utilising a mixed optimisation and interval arithmetic strategy, a numerical example was presented whereby the frequency response function of a lumped parameter truck model was subject to an interval SA with respect to its lumped mass values.
In the present paper, we propose a (conceptually) similar interval SA methodology to identify (and rank order) the uncertainty contribution of individual joints within a complex built-up structure.
The proposed analysis is based on the dual formulation of the sub-structuring problem and utilises the Sherman–Morrison formula to factor out the contribution of an individual joint. The considered joint dynamics are limited to those of linear spring-damper like connections. Though simple in form, joints of this type have been used successfully to improve estimates of coupled assembly dynamics (Saeed et al., 2020b,a). The stiffness and damping of each joint is represented by a complex rectangular interval, and is used to establish precise interval bounds on the coupled assembly’s complex admittance (also its operational response). To rank order the influence of each joint, we consider the relative change between the input (joint stiffness and damping) and output (complex admittance) interval area as a sensitivity metric. These developments are illustrated by a numerical example.
Having introduced the context of this paper, its remainder is organised as follows. Section 2 begins by introducing the governing component-based equations for complex structures with flexible interface dynamics. Section 3 provides some detail on interval analysis, including complex interval representations, and describes the concept of interval SA. Section 4 considers the interval assessment of joint variability, before section 5 demonstrates the proposed joint interval SA by numerical example. Finally, section 6 draws some concluding remarks.
2. Dual representation of flexible interface dynamics in complex built-up structures
When analysing the properties of complex structures, and the influence of joint dynamics, it is convenient to adopt a component-based approach where each structural component (s) is represented by its free interface admittance matrix


The components that comprise built-up structures may be classed as either active, or passive. Active components contain vibration generating mechanisms, and include motors, engines, pumps, etc. Passive components simply transmit or radiate energy. A generic two component active-passive assembly is depicted in Figure 1. Each component is represented by two sets of DoFs, the interface set c and the internal set a or b. This picture may be readily generalised to an arbitrary number of components. General active-passive assembly (AB) with joint (J) flexibility. The relative interface displacement at the nth connection δ
n
= u
An
− u
Bn
is proportional to the interface flexibility γ
n
and the internal coupling force λ
n
. a and b represent internal DoFs, c are the interface DoFs, and o is the internal region where operational forces develop.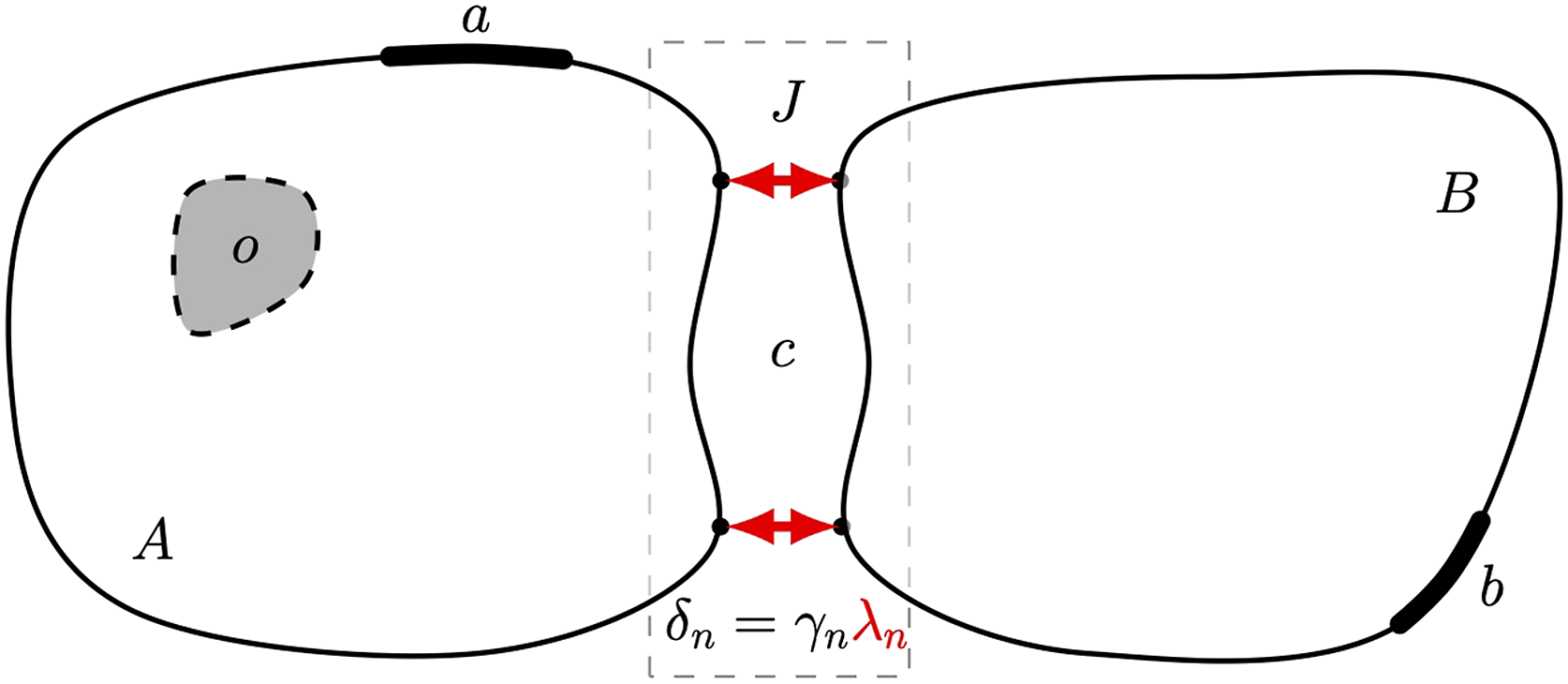
The equations of motion representing an uncoupled system of S components are given by



In the presence of a flexible interface, for example, due to a spring-damper joint, continuity is not satisfied. Rather


To satisfy equilibrium, the interface force

The unknown joint forces λ are found using the relaxed continuity condition as follows. The interface force


Equation (11) is substituted into the relaxed continuity condition (equation (6))

Solving for λ then yields

Finally, substituting equation (13) into equation (11) leads to,

In the present paper we are interested in the sensitivity/uncertainty of the coupled admittance
3. Interval analysis
Interval analysis falls within a family of non-probabilistic methods for evaluating uncertainty in complex systems (Langley, 2000; Faes and Moens, 2020). One of the main difficulties when evaluating the uncertainty of a complex system by probabilistic means is the acquirement of detailed statistical input data. This is particularly so for joint dynamics. In the absence of such data, complex statistical analysis cannot be justified. It is this issue that has lead to the development of non-probabilistic, or ‘possibilistic’, analysis methods.
With an interval-based analysis, the uncertain parameter x is not treated statistically. Rather, it is taken to be bounded, such that



Unlike a probability distribution, the interval bounds provide no detailed information on the likelihood of a particular value of x, only that its true value must occur within the stated bounds.
There are two common ways to extend the interval representation to complex variables (required to represent joint stiffness and damping). In one, the complex interval is represented by a circular disk in the complex plane, characterised by its centre point and radius (Petkovic and Ljiljana, 1998; Rump, 1999). In the other, the real and imaginary parts of the complex number are represented by independent real intervals. This leads to a rectangular interval in the complex plane (Petkovic and Ljiljana, 1998; Rokne and Lancaster, 1971; Lohner and Gudenberg, 1985). In the present paper, we will adopt the rectangular complex interval representation as it enables the independent assignment of joint stiffness and damping.
Adopting the centre point and half width notation above, a complex rectangular interval takes the form Example of a complex rectangular interval.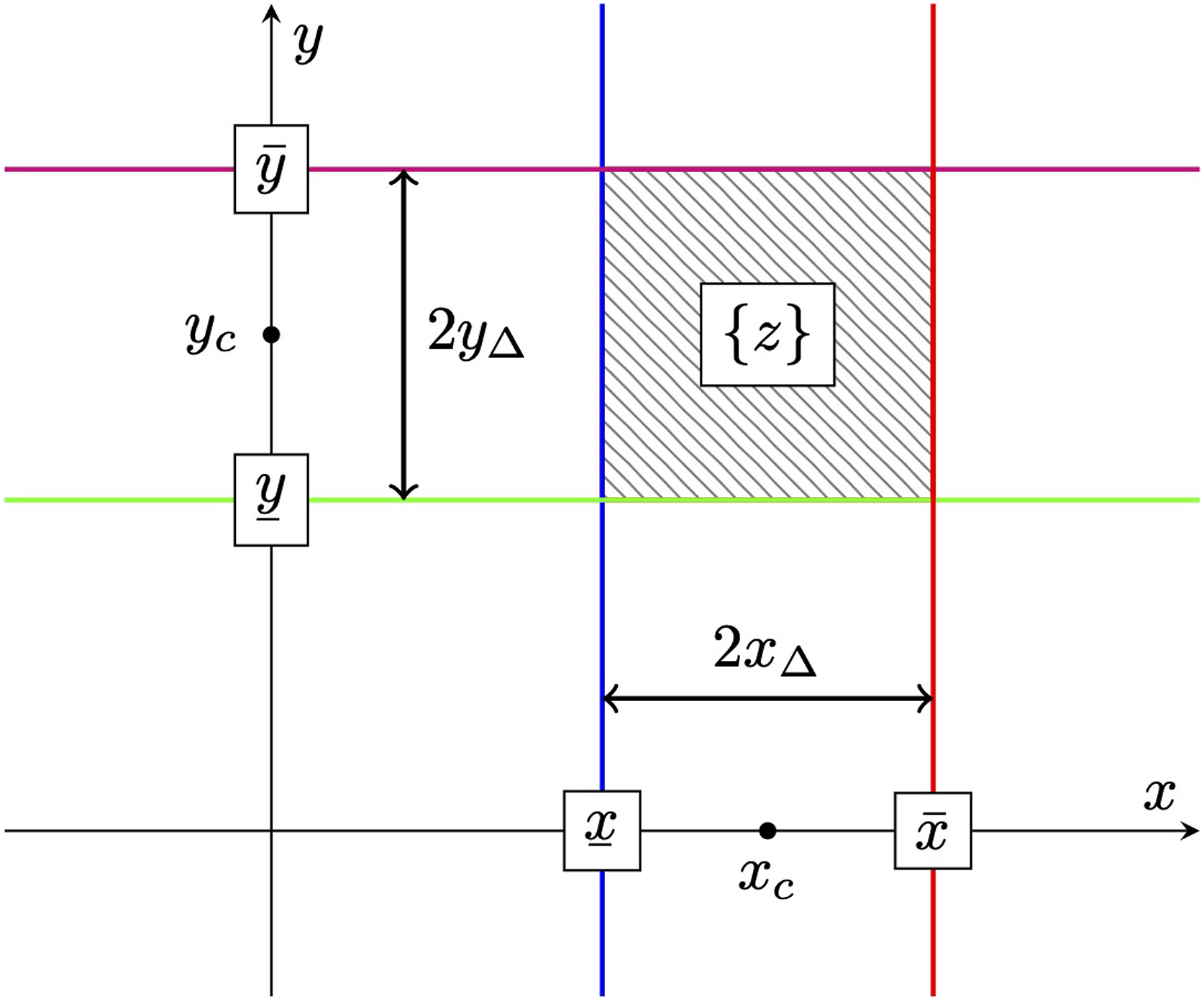

Having defined the notion of a real/complex interval, it is the role of interval analysis to compute the upper and lower bounds of functions whose inputs are intervals

For simple functions, this can be achieved by redefining the basic arithmetic operations + − × ÷ as interval operations ⊕ ⊖ ⊗ ⊘ (Petkovic and Ljiljana, 1998). This leads to the so-called natural interval extension of the function. For more complex problems, global optimisation (Neumaier and Hansen, 1994) or vertex (Dong and Shah, 1987) methods can be used, among other problem specific algorithms.
Care should be taken when using the natural interval extension of a function. Whilst for real intervals the operations ⊕ ⊖ ⊗ ⊘ are optimal (i.e. they provide the smallest possible bounds that enclose the true range of outcomes), this is not so for complex intervals. Specifically, complex division. The natural extension of complex interval division can be expressed as

If standard interval arithmetic operations are applied to complex division, the numerator and denominator intervals are treated independently. For example, the instance of {y
r
} in the numerator is considered independent to that being squared in the denominator
As a final remark on interval analysis, it is noted that non-interval quantities can readily be incorporated within interval arithmetic by considering an interval whose upper and lower bounds are of equal value, x = {x} = [x x].
3.1 Interval sensitivity analysis
Sensitivity analysis (SA) is a tool used to allocate, or apportion, the uncertainty in a system’s output to that of its input parameters (Saltelli et al., 2008). Methods of SA can be broadly categorised as local or global. Local methods assume a small variance on the input parameters and consider a linearisation of the system’s dynamics. Such methods are typically based on partial derivatives (obtained analytically or by numerical approximation). Local methods are advantageous in terms of computational efficiency, but limited in terms of accuracy, especially for non-linear systems with reasonable levels of input variance. Global methods overcome this limitation by sampling the model output over the space of input parameters. Whilst computationally more expensive, this approach ensures that model non-linearity and input parameter distributions are accounted for. Hence, more a robust analysis is achieved.
The local and global methods described above are limited, respectively, by the assumption of linearity and computational efficiency. An alternative approach, overcoming these limitations, is obtained by considering an interval-based SA (Moens and Vandepitte, 2007). Whilst interval SA does not provide a detailed analysis like the global approach, it avoids the need to sample the entire input space; instead of representing each input as a probability distribution, intervals are considered and the bounds of the output are determined.
To illustrate the concept of interval SA we consider the function f( ), whose inputs and output are treated as complex rectangular intervals. We consider the interval output resulting from each input individually
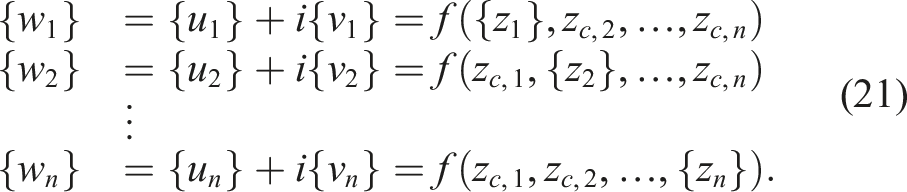
Based on equation (21), a measure of sensitivity can be obtained in several ways. Moens and Vandepitte (2007) considered the change in absolute interval widths on the input (z) and the output (w) side of the problem and proposed the sensitivity metric (assuming real valued intervals)

For reasons discussed later, in the present paper we choose to define a complex interval sensitivity metric instead as the ratio of output interval area to input interval area
In this way, S n describes the relative increase in uncertainty considering the entire range of possible outputs in the complex plane; given the same range of possible inputs, a larger value of S n indicates a greater range of possible outputs and a greater sensitivity of the function f( ).
The reason for this particular choice of sensitivity metric is that, for the problem considered here (assembly admittance in the presence of joint uncertainty), the output interval takes a very similar form to the Jacobian matrix that describes the partial derivatives of the assembly admittance with respect to joint flexibility. Hence, with this definition of interval sensitivity there is a clear connection to linear/gradient-based SA.
4. Interval assessment of joint variability
In this section we will consider the interval-based assessment of uncertain joint dynamics, and its application in determining the maximum and minimum bounds of an assembled structure’s admittance matrix.
As shown in section 2, the dual formulation, in the presence of a flexible interface, leads to the following equation for the assembled admittance matrix


Note that


Herein we propose that the interface stiffness Z
n
be treated as a complex rectangular interval {Z
n
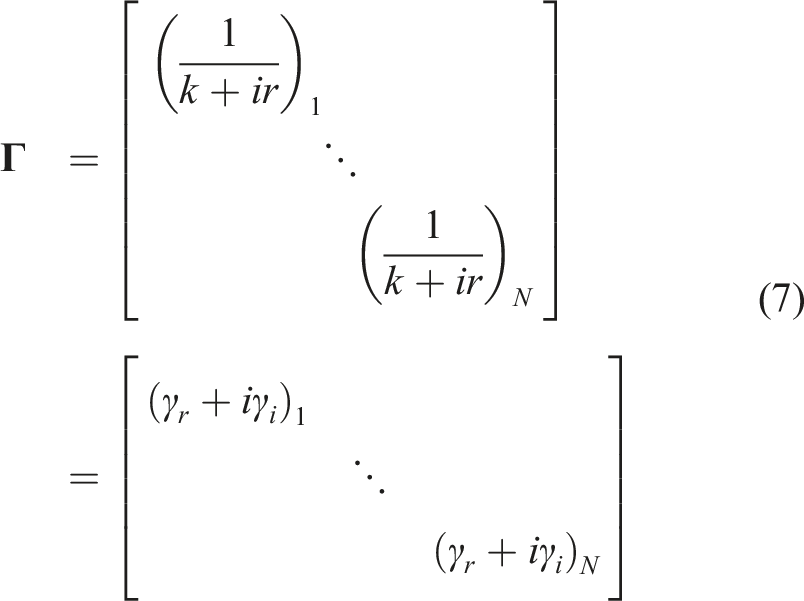
}, such that its bounds are supposed to contain all possible values of joint stiffness and damping. The complex interval {Z} = {k} + i{r} is characterised by a pair of real intervals, namely


Treating the interface stiffness as a complex interval {Z
n
}, and substituting equations (29) and (30) into equation (24), leads to the interval expression


It is important that the complex interval division of equation (33) is performed optimally using an appropriate algorithm. Unlike complex addition, subtraction and multiplication, the natural interval extension of complex division is not optimal and can lead to a large overestimation of the resulting bound (Rokne and Lancaster, 1971; Lohner and Gudenberg, 1985; Mahmood and Soylu, 2020). In the present paper, we propose an application specific algorithm (see Appendix B) to obtain the precise bounds of the complex interval {
Note that
It is further noted that the matrix product within
This Jacobian matrix would form the basis of a local/gradient-based SA (Meggitt, 2022). From the above, it is clear that
4.1 Response interval
In the presence of an active component (i.e. a vibration source) the operational response
The operational response of a complex assembly can be expressed in the form

As per equation (36), the complex interval of an operational response can be obtained by
5. Numerical example
In this section we will demonstrate the interval SA for joint dynamics through a numerical example. The system considered is illustrated in Figure 3. It is an 11 DoF mass-spring-damper system (numeric values are available via the supplementary MATLAB codes). It comprises two sub-systems (green and blue) connected by three joint elements (red), whose properties are considered uncertain. Numerical mass-spring example.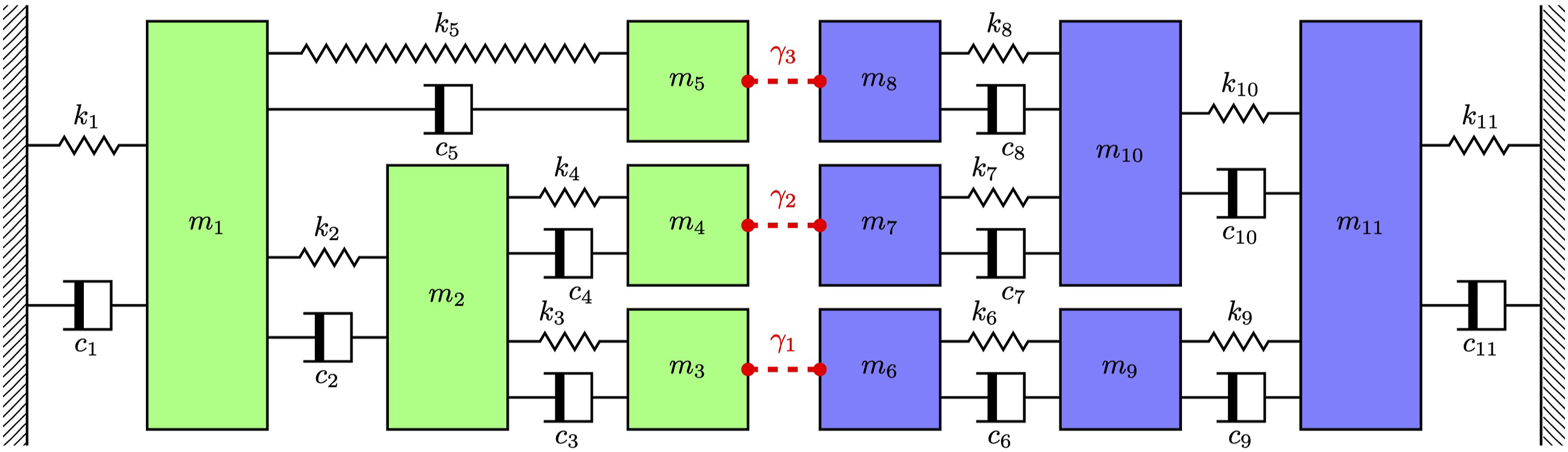
In this numerical example we will (a) for a single joint, demonstrate the interval computation for the real, imaginary and magnitude admittance bounds, and compare the results against those obtained by a sample-based estimation, and (b) rank order the uncertainty contribution of each joint towards the assembly admittance using the proposed sensitivity metric.
In what follows, each joint is represented by its centre point stiffness and damping, and parametrised by an uncertainty factor α□ = □Δ/□
c
which controls the width of the interval bound


Unless otherwise stated, the centre point stiffness and damping values are set at 1 × 104 (N/m) and 100 (Ns/m), respectively, with uncertainty factors α k,n = 0.5 and α r,n = 0.25.
To validate the interval computation a sample-based estimate is used. The complex joint interval
We begin by considering the interval bounds due to a single joint; joint 1 is represented by the complex interval {Z1}, whilst joints 2 and 3 are considered deterministic (αk,2 = αk,3 = 0, αr,2 = αr,3 = 0).
Shown in Figure 4 are the interval bounds of the real and imaginary parts of the complex admittance Interval bounds for the real (top) and imaginary (bottom) admittance 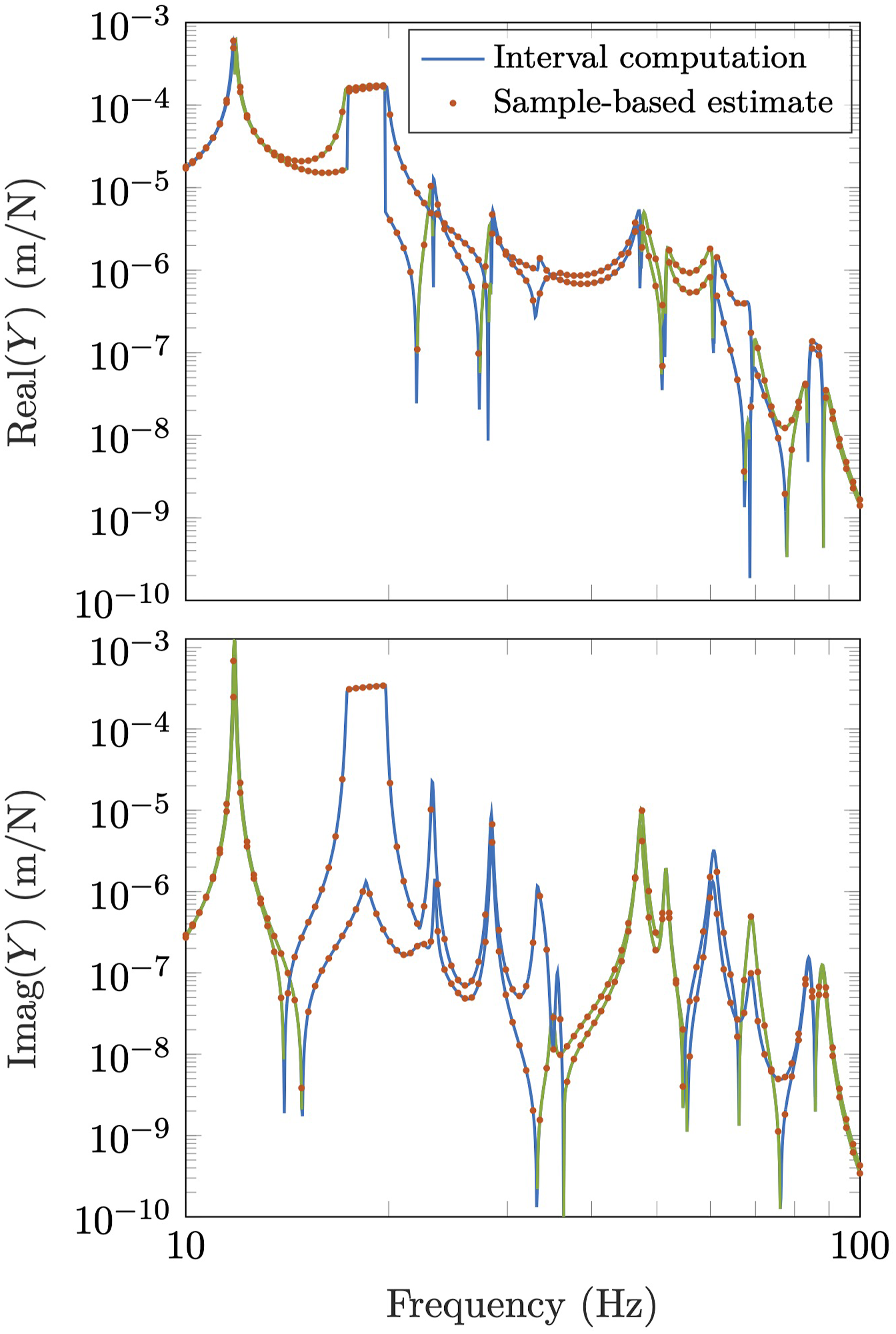
It is clear from Figure 4 that the interval computation (see Appendix B) correctly determines the bounds on both the real and imaginary admittance. These bounds will be used shortly to compute the interval sensitivity metric, as per equation (40).
Shown in Figure 5 are the magnitude bounds of the complex admittance Interval bounds of admittance magnitude 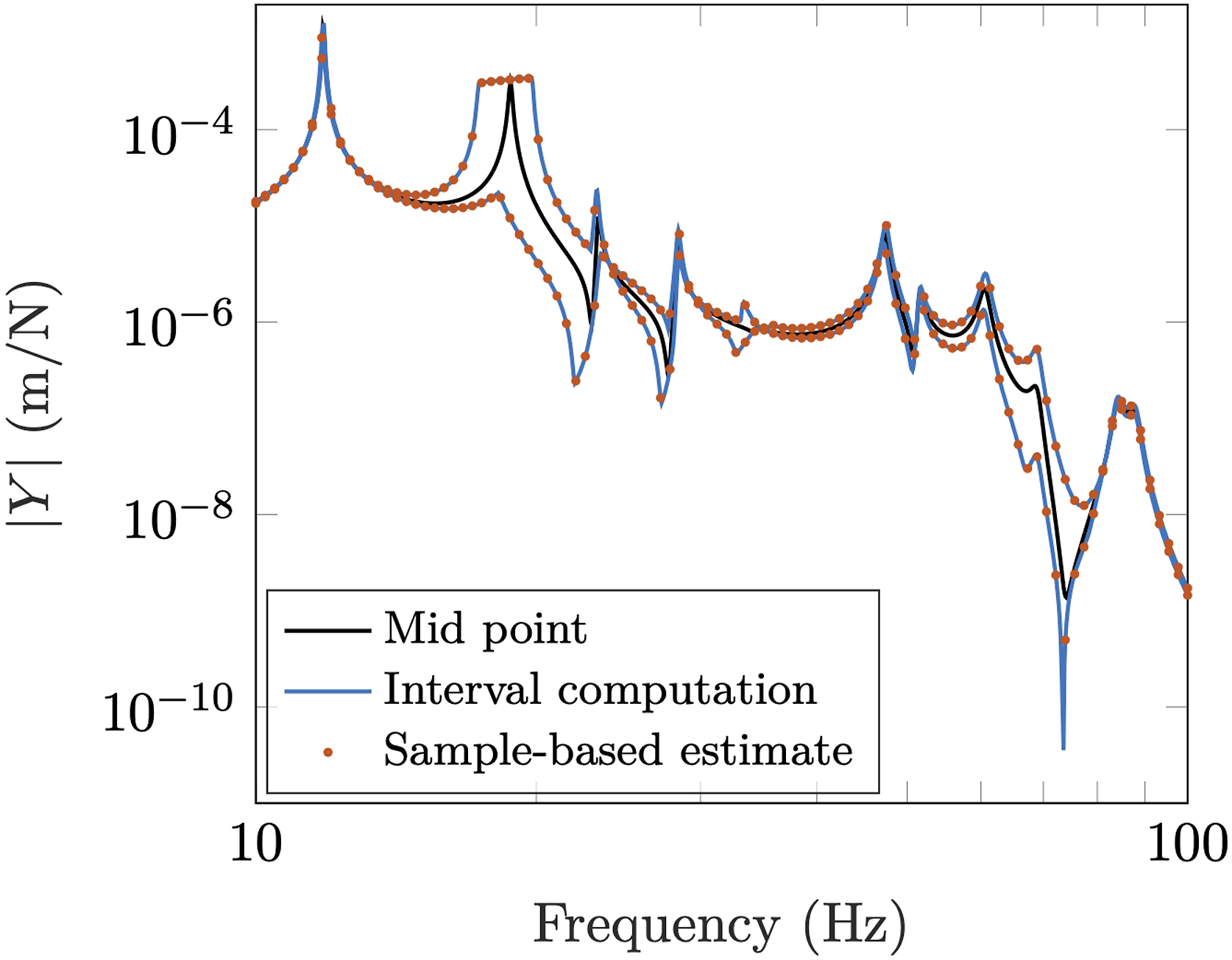
It is interesting to note that the lower bound of the
Figures 4 and 5 provide a visual indication of the sensitivity of the assembly admittance with respect to joint 1. It is clear that the certain modes have a greater sensitivity to joint uncertainty than others.
5.1 Interval sensitivity analysis
With attention focused towards the influence of joint uncertainty, our definition of complex interval sensitivity (see equation (23)) takes the form

The sensitivity S
n
describes the relative amplification of uncertainty in terms of the complex interval areas that describe the joint and coupled admittance. The greater the metric, the greater the influence that joint has on the assembly admittance. By comparing the sensitivity metric of each joint it is possible to identify the dominant source of uncertainty in the system. For clarity, we present all sensitivity metrics in a normalised form

It should be noted that the sensitivity metric considers the influence of each joint independently (remaining joints are treated as deterministic with centre point stiffness and damping); interaction effects between multiple joints are not considered.
Shown in Figure 6 are the magnitude interval bounds with respect to each uncertain joint (taking α
k,n
= 0.5, α
r,n
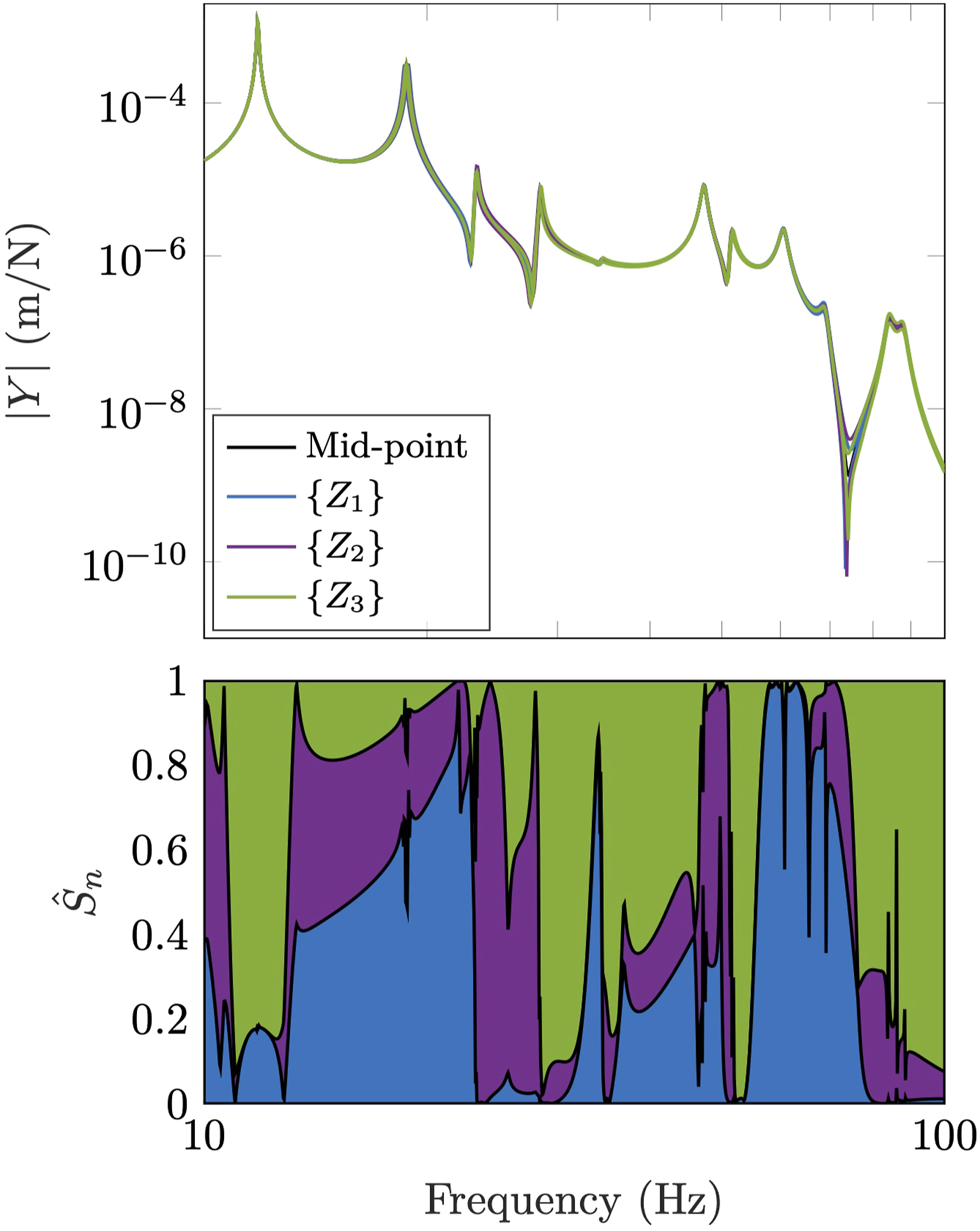
= 0.25), alongside their corresponding (normalised) sensitivity metrics. For clarity, sample-based estimates have been omitted. Figure 7 similarly presents the magnitude interval and sensitivity metrics for the reduced uncertainty levels of α
k,n
= 0.05 and α
r,n
= 0.025. Interval bounds of the admittance magnitude (top) considering each joint’s interval uncertainty individually, and the corresponding interval sensitivity metrics (bottom). Mid-point admittance shown in black. Uncertainty factors: Interval bounds of the admittance magnitude (top) considering each joint’s interval uncertainty individually, and the corresponding interval sensitivity metrics (bottom). Mid-point admittance shown in black. Uncertainty factors: 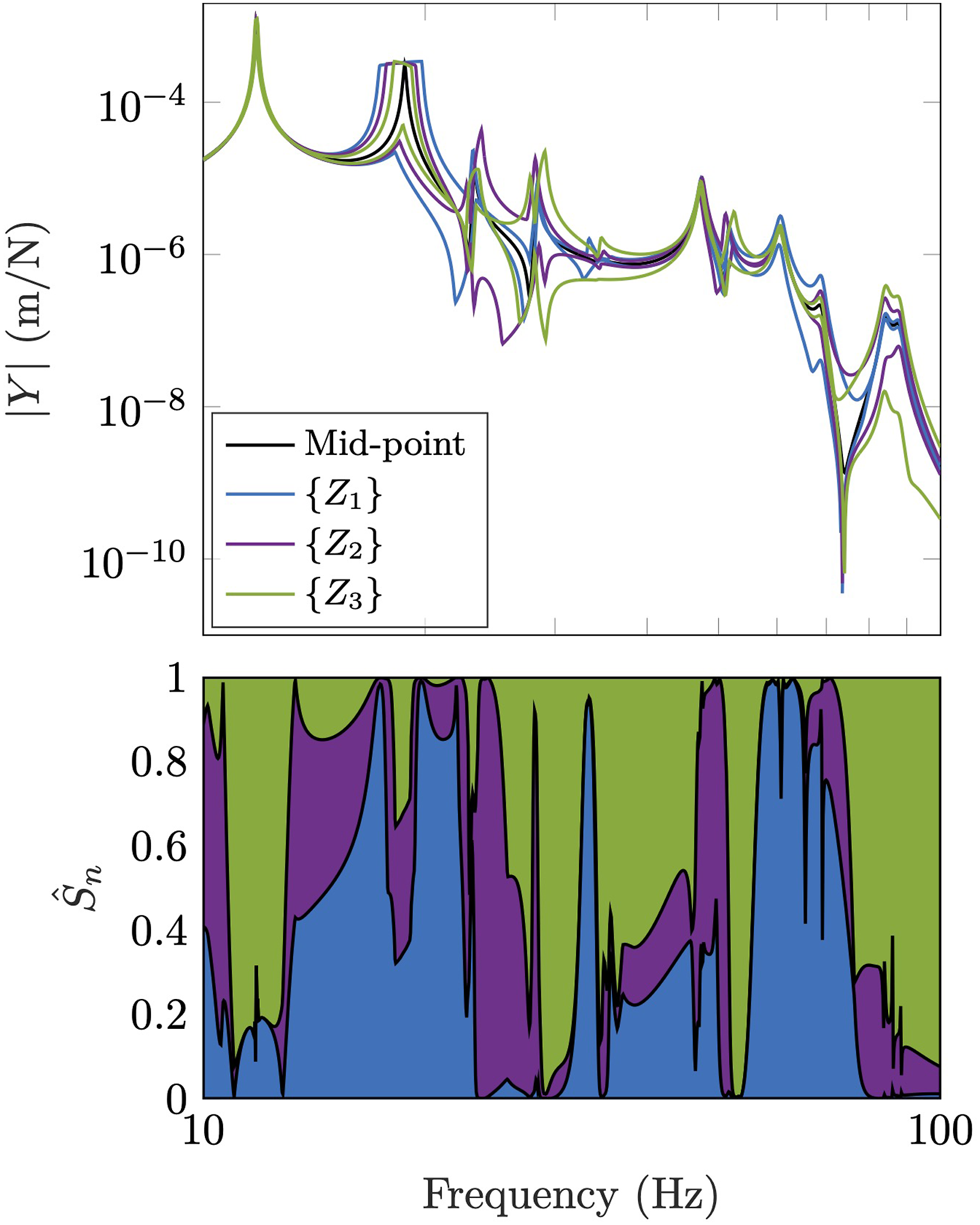
The relative widths of the magnitude bounds provide a visual indication of the influence of each uncertain joint, though their respective sensitivities depend also on the relative size of the input interval; this cannot be interpreted from the magnitude bounds alone. Rather, the sensitivity metric
Careful comparison of the sensitivity metrics presented in Figures 6 and 7 uncover an interesting result. The sensitivity with respect to a particular joint depends on the size of the input interval; the sensitivity metric captures the non-linear contribution of the uncertain joint’s dynamics towards the system response (which arises due to equation (30)). Though only a minor effect in the present case study, more complex systems can exhibit much greater effects (Meggitt, 2022). This ability to capture non-linear behaviour is a principal advantage of interval-based SA over conventional gradient-based methods, which rely on a linearisation of the system dynamics.
For more complex systems, the sensitivities of several joints can be combined to form a single sensitivity value. For example, the stiffness and damping in each coordinate direction (x, y, z) for a single connection point might be combined to yield a sensitivity value for the connection as a whole (Meggitt, 2022).
6. Conclusions
Joints are a principal source of uncertainty when modelling the dynamics of complex built-up structures. To better understand their influence, it is of interest to apportion the uncertainty of a system’s output (FRF or operational response) to that of its uncertain joint dynamics by means of sensitivity analysis (SA). To overcome the limitations of conventional ‘probabilistic’ SA, we have proposed an interval-based SA for joint dynamics in complex built-up structures.
We introduce an application-specific algorithm that enables precise bounds on the real, imaginary and magnitude admittance to be determined, based on the interval uncertainty of each joint. To characterise the sensitivity of the system to a particular joint, we propose a complex interval sensitivity metric, representing a ratio of complex interval areas on the input and output of the system. This metric indicates the relative increase or decrease in uncertainty, in an interval sense, due to the dynamics of the system. This metric can be used to identify those joints that contribute unacceptably to the total uncertainty of the system, for example, for model refinement purposes.
The advantages of the proposed interval SA, over conventional (probabilistic) local and global methods are many: 1) As per the interval paradigm, there is no need for a detailed probabilistic description of each joint, which is often unavailable. Rather, only the upper and lower limits of joint stiffness and damping are required. 2) The interval SA is not limited to the linear behaviour of the system (as per local gradient-based methods); all system non-linearities contained within the input interval bounds are accounted for; hence, the method can be termed ‘pseudo-global’. The ability of interval SA to capture the system’s non-linear dependence on the joint dynamics was demonstrated by numerical example, where it was shown that the sensitivity metric provided a different rank ordering when subject to different levels of input uncertainty. 3) Unlike standard global methods, which sample the input parameter space over their probabilistic representations, the proposed interval SA is computed analytically, and so avoids the computational burden of sampling over a multi-dimension input space.
Though, a notable limitation of the proposed interval SA is its inability to treat multiple joints at a time, both in terms of uncertainty propagation (obtaining the admittance bounds) and SA. Consequently, the interaction between multiple uncertain joints cannot be accounted for, nor can the admittance bounds due to several uncertain joints be determined. Extension of the proposed interval SA to the multi-joint case was considered beyond the scope of this paper, and is left as further work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Supplementary material
All MATLAB codes are available on request.
Jacobian of the coupled admittance
In this section we derive the Jacobian matrix for the coupled admittance with respect to a specific joint flexibility.
We begin by considering the complex differential of the assembly admittance
Noting that interest lies in the differential interface flexibility d(
Application of the product rule,
Recalling the differential of a matrix inverse (Hjørungnes, 2013),
In equation (46), we can interpret d
The Jacobian is evaluated for a specific value of interface flexibility by setting the elements of
Interval computation
In this section we describe the computation of the complex interval admittance {
Taking the ijth element of the admittance,
Omitting subscripts for clarity, we begin by considering the bounds of the complex interval {w}.
With z = x + iy and J = a + ib, we have
Rearranging the above we obtain equations for the real and imaginary parts of z
To represent the intervals
Taking the
The intersection of the four domains describes a conformal mapping from the complex plane z = x + iy (specifically, the complex rectangular interval {z}), to the domain of w = u + iv. An example is illustrated in Figure 8. The complex interval {w} represents the smallest rectangle that encloses the domain w. Conformal map f(z) = J/z applied to the open regions 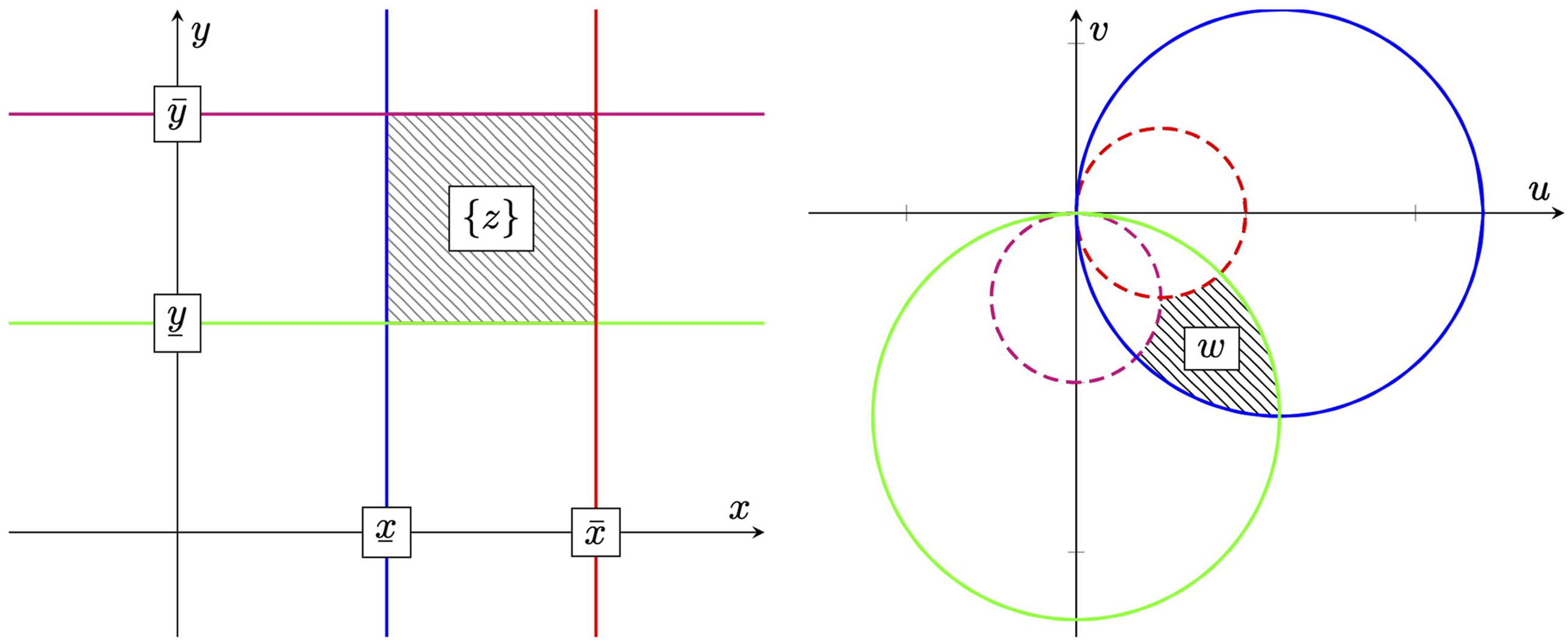
The subsequent addition of
Hence, evaluation of the complex interval admittance {Y C } reduces to finding the smallest enclosing rectangle that surrounds the intersection of the translated circular domains described above.
An estimate of magnitude interval admittance {|Y C |} can subsequently be found by considering each vertex of the complex rectangularinterval {Y C }, taking smallest/largest absolute distance from the origin as the minimum/maximum interval bound. However, for certain combinations of J and z this can lead to a large over estimation of the true magnitude bound, as the complex (rectangular) interval {Y C } naturally encloses regions that lie outside the true domain of Y C . An alternative approach considers the relative size of each circular domain and finds the precise magnitude bounds. This approach is detailed in the following subsection.