
Abstract
Modal testing is used to experimentally determine the dynamic behavior of mechanical structures. The planning of the positions for exciting the structure, the so-called driving points, is essential for efficient experimental modal testing. Driving points are identified either by an initial assumption of possible excitation points and the experimental evaluation of their quality, or with the help of numerical models and indicators for optimal driving point selection. However, for practical applications, several driving points are usually required to excite all modes in the frequency range of interest, which is not covered in state-of-the-art indicators for driving point selection. This paper therefore presents a method for driving point identification with consideration of multiple driving points. Additionally, a criterion was developed that considers the excitability of modes, risks of double hits, and the excitation orientation simultaneously in order to increase the accuracy of the driving point identification. This criterion enables the evaluation of the excitation quality of each surface node and any mode combination using an automated selection method for determining the optimum set of driving points. The presented method assumes that natural frequencies and eigenvectors from preliminary numerical models are available for planning. By applying the method on application examples, the reduced effort required for a full modal analysis is demonstrated.
Keywords
1. Introduction
Modal testing enables the experimental determination of the dynamic behavior of mechanical structures in the form of modal parameters such as eigenfrequency, mode shape, and modal damping which are typically used for the validation and updating of numerical models within a specified frequency range of interest. The procedure for data acquisition and data analysis is often referred to as experimental modal analysis (EMA) (Brandt, 2011).
During an EMA, the structure is excited by an external excitation source which typically is a modal hammer (Døssing, 1988). In some cases, modal hammers are replaced by shakers, which will not be discussed in this paper. The measured excitation force and structural response signals are transformed into the frequency domain, and the ratio of response and excitation yields the frequency response functions (FRFs) from which the modal parameters can be determined using modal fitting algorithms. (Ewins, 2000)
The excitation source required to measure FRFs can only be placed on a finite number of surface points or degrees of freedom (DOFs). In order to capture all modal parameters within a certain frequency range of interest, all modes must be sufficiently excited. The positions where the structure is excited are called driving points. For practical structures, for example, housing components, several driving points are usually needed to excite all modes of the frequency range of interest because local modes may only be active in one section of the system, and even global mode shapes may differ enough to render areas of high mobility in one mode useless for the excitation of another.
For efficient modal testing, the amount of driving points should be as small as possible. Simulation models can be used for supporting the measurement planning by performing a numerical modal analysis (NMA) to obtain the mode shapes and natural frequencies within the frequency range of interest. In case of only few modes in the frequency range of interest, the visualization of mode shapes can help to identify response DOFs and driving points (Oza and Shah, 2020). However, this approach is not suitable for measuring multiple modes of complex structures with a minimum measurement effort. Therefore, methods have been developed to assist in measurement planning on the basis of NMA. For planning the response points, the Modal Assurance Criterion can be used (Allemang and Brown, 1982). Selecting the driving points poses the following challenges. First, the excitation can only be induced perpendicular to the surface without additional modifications to the structure. Second, the structural dynamic behavior often exhibits high spatial sensitivity: A small change in excitation position can have large effects for the excitability of modes, for example, in regions close to nodal lines. Third, double hits can occur when using modal hammers due to high vibration velocity amplitudes at the driving point, rendering the driving point unusable (Ewins, 2000). Fourth, multiple driving points are often needed to excite all modes of the frequency range of interest. The consideration of these challenges for the planning of driving points is essential for successful modal testing. However, existing methods for driving point determination do not fully cover these challenges. Therefore, a combined driving point criterion (DPC) incorporating the mentioned aspects of driving point selection into one indicator is proposed.
In chapter 2, state-of-the-art methods for planning driving points and its deficits for practical applications are presented. In chapter 3, a new method for driving point calculation is shown. Chapter 4 demonstrates the application of the new method for two application examples and its practicability for modal testing.
2. State of the art
The identification of modal parameters using EMA is highly influenced by the choice of driving points (Mali and Singru, 2018). Therefore, different methods for choosing the driving points have been proposed in the literature depending of the aim of conducting an EMA. When focusing on the modes which are excited during well-known operation conditions, an excitation at the position, where excitations occur during the operation, may be sufficient for trouble shooting (Nåvik et al., 2021). However, a full modal description of the structure usually cannot be obtained by this method. If an EMA is carried out with the aim of identifying all modal parameters in a certain frequency range, as it is often necessary for validating numerical models, the planning and selection of driving points is either based on testing multiple possible excitation points on the system prior to the actual EMA (Donaldson and Mechefske, 2020; Oktav, 2020) or on numerical pre-calculations. General requirements for the selection of driving points are the avoidance of areas of nodal lines and areas sensitive to double hits.
The optimum driving point (ODP) and non-optimum driving point (NODP) techniques according to Imamovic and Ewins (1997) consider mobilities of nodes for a given set of preselected modes. The ODP value is calculated by multiplying the eigenvector component

High values indicate points of high mobility for the mode selection. Values close to zero indicate areas close to or at nodal lines that should be avoided. Typically, the DOF with the highest ODP is selected as driving point. Optimum driving point techniques are applied in various fields of application such as automotive (Wegerhoff, 2017), aerospace (Koksal et al., 2014), or machine tool industry (Law et al., 2013).
The NOPD yields the smallest eigenvector component for a given mode set (equation (2))

Values close to zero indicate positions that should be avoided as driving points. In (Liu et al., 2020), the application of the NODP technique is shown for a marine gearbox.
To identify locations with high-velocity amplitudes and therefore high risk of double hits, the average driving DOF velocity (ADDOFV) is proposed in Imamovic and Ewins (1997), where

High values indicate areas of high risk of double hits. An application of the ADDOFV on an aerial vehicle wing is shown in (Pedramasl et al., 2017).
For the ODP and NODP technique, double hit avoidance can be considered by dividing the ODP and NODP values by the ADDOFV (Imamovic, 1998; Ziaei Rad, 2005).
Alternative formulations for identifying driving points are the driving point residue algorithm searching for the most efficient DOF to excite different modes of a given mode set based on the modal vector (Siemens, 2020) and the normal mode indicator function algorithm searching for suitable driving points based on transfer functions for preselected candidate exciter locations. The methods do not consider the risk of double hits.
The presented indicators are calculated based on a predefined and fixed mode set. The number of considered modes influences the value range of the indicators, that is, the ODP value decreases with increasing number of eigenmodes considered. A comparison over different mode numbers as well as different applications and thus the definition of suitable value ranges of the indicators is not possible. However, for practical structures with many modes, one single driving point is typically not sufficient to excite all modes of the frequency ranges of interest. Due to the absence of comparability, the indicators do not allow for an automated splitting into several groups with different numbers of modes. Another deficit of the methods shown is that the directional dependency of the impact direction is not considered, since the excitation with a modal hammer is always perpendicular to the surface. There is no indicator available that provides a comparable value considering excitability, double hit avoidance as well as direction dependency for a variable mode basis simultaneously.
An indicator is required that is comparable over different mode groups and mode numbers in order to enable automated determination of a set of minimum necessary driving points to minimize the measurement and analysis effort.
3. Enhanced ODP method
A new two-step method for driving point selection is developed to overcome the deficits of the state-of-the-art methods. The requirements for the new method are specified in chapter 3.1. In chapter 3.2, a method is proposed for evaluating the quality of a driving point in the form of the DPC which provides a single-number value for the excitation quality for each DOF and any mode combination. In chapter 3.3, an automated selection method is presented, which determines the optimum set of driving points based on the DPC.
3.1. Requirements
The aim of the presented enhanced optimum driving point (EODP) method is to provide one single normalized indicator that contains information about the practical excitability of the modes of complex structures at predefined DOFs. Therefore, the following aspects need improvement.
3.2. Driving point criterion
In order to choose a suitable driving point for EMA, the DPC is proposed which indicates how suitable a specific point is as a driving point on a scale from zero to one where zero indicates a point unsuitable for excitation and one indicates the perfect driving point. The DPC is obtained by multiplying two separate criteria corresponding to the two requirements presented in chapter 3.1, which both are scaled to a value between zero and one, see Figure 1. Driving point criterion calculation method.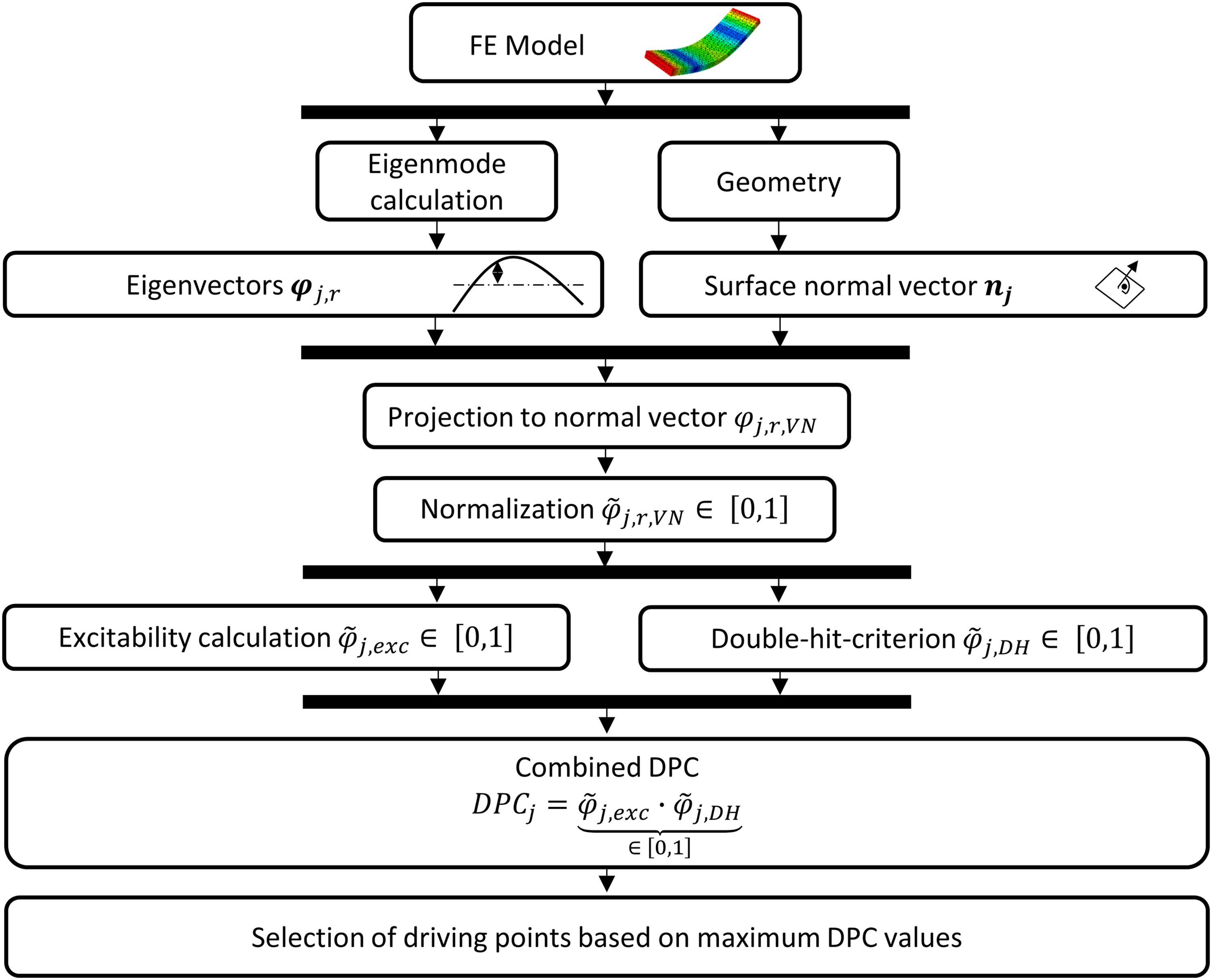
A preliminary FE-model of the structure forms the basis for calculating the DPC. As the mode shapes are the dominant influencing factors for the proceeding calculations, a coarse FE-model is sufficient for the determination of driving points. Small deviations in eigenfrequencies can be accepted, as they are only used within the ADDOFV calculation to weigh the modes with respect to each other, thus not changing the overall results. The eigenvector components
An excitation using modal hammers is only feasible in the normal direction of a surface. For example, exciting a torsional mode with a hammer in tangential direction is not possible. Therefore, the first improvement to the existing ODP calculation method is proposed. Instead of using the absolute values of the eigenvector components, only the components normal to the excitations surface are considered by projecting the eigenvector component at every node to the corresponding normal vector, see equation (4), which are then normalized with respect to the maximum eigenvector component of all nodes for this mode (see equation (5)). This yields a relative criterion for how much a node is active in a certain mode shape in comparison to the other nodes

Next, the criteria for the two requirements (see chapter 3.1) are introduced. While in the existing ODP calculation, the ODP value is calculated by multiplying all eigenvector components and thus yielding smaller values for more modes (equation (1)), the new method uses a product root approach (equation (6))

The result is independent of the number of considered modes and allows comparing groups with different numbers of modes (see also chapter 3.3). To address the risk of double hits, the ADDOFV criterion, equation (3), is used and adapted for the vector normalized eigenvector components, which indicates areas of high velocities, see equation (7). After normalization, a value is calculated, which penalizes points that have high velocities in many of the regarded modes (equation (8))


As both values,
To illustrate and verify the proposed method, a simple simulation model is used, see Figure 2 left. The model consists of two plates that are meshed in different element sizes and are connected to each other by a fixed connection. On the right of Figure 2, the mode shapes of the first three eigenmodes of the model in free–free condition are shown. Left: the FE-model for verification of the proposed method; right: the first three eigenmodes.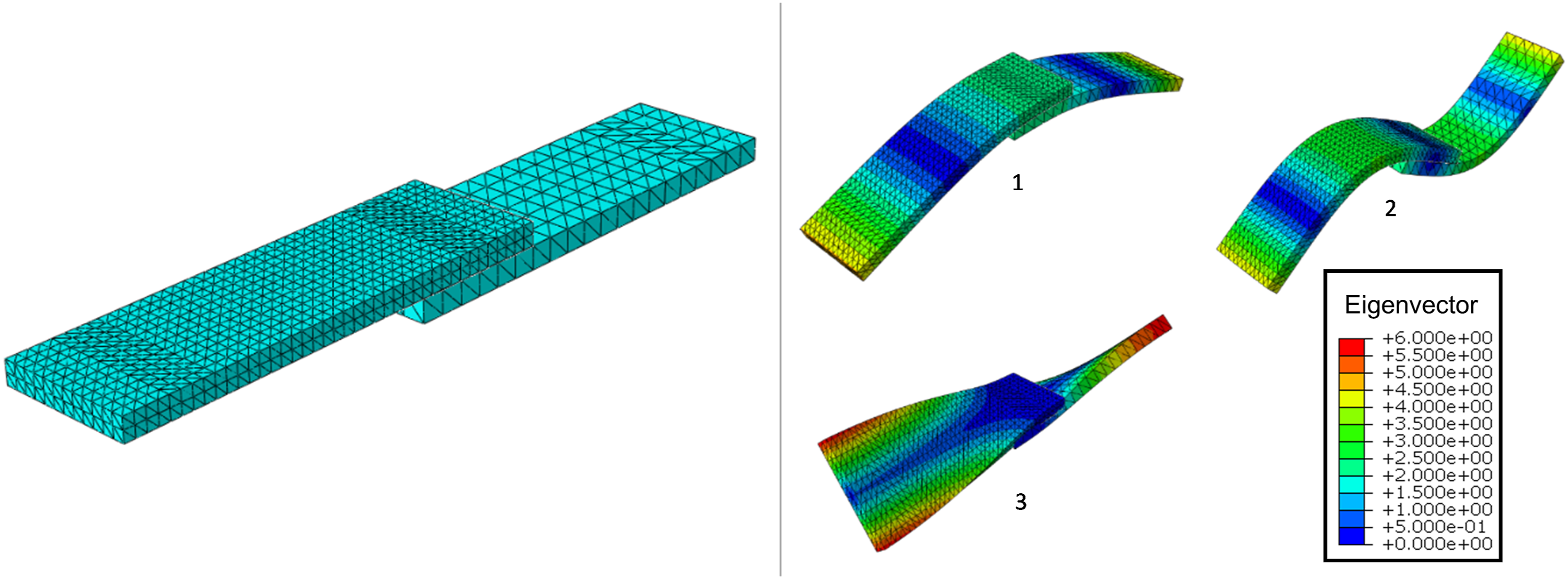
The conventional ODP (equation (1)) considering these three modes is shown in Figure 3 on the left-hand side. All potential driving points are on the corners of the plates as the displacement of all three modes is maximal at these points. The deformation shown in Figure 3 on the left-hand side is an overlay of all three mode shapes considered. However, these points on the corners are not suitable for excitation, as they do not allow for a reproducible excitation. Additionally, the points with high ODP values are also the points with the highest velocities and thus are prone to double hits. The model shows that both the projection to the normal of the surface and the penalty of high-velocity points are required to improve the driving point selection. Results for the state-of-the-art method on the simple model for the first three modes. Left: ODP; right: ADDOFV. Note: ODP: optimum driving point; ADDOFV: average driving DOF velocity.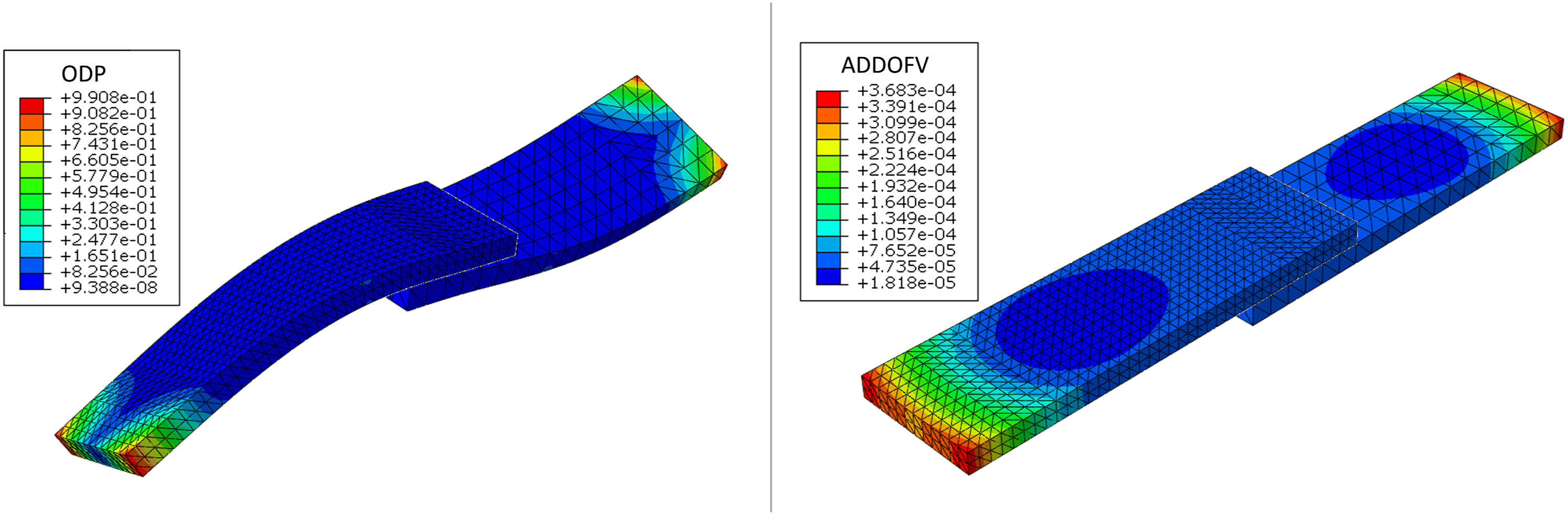
The criteria which are necessary to calculate the DPC are shown in Figure 4. Criteria for driving point selection on the simple model for the first three modes. Top left: ODP values for eigenvector components in normal direction; top right: ADDOFV in normal direction; lower left: the product root excitation criterion; lower right: DPC. Note: ADDOFV: average driving DOF velocity; DPC: driving point criterion.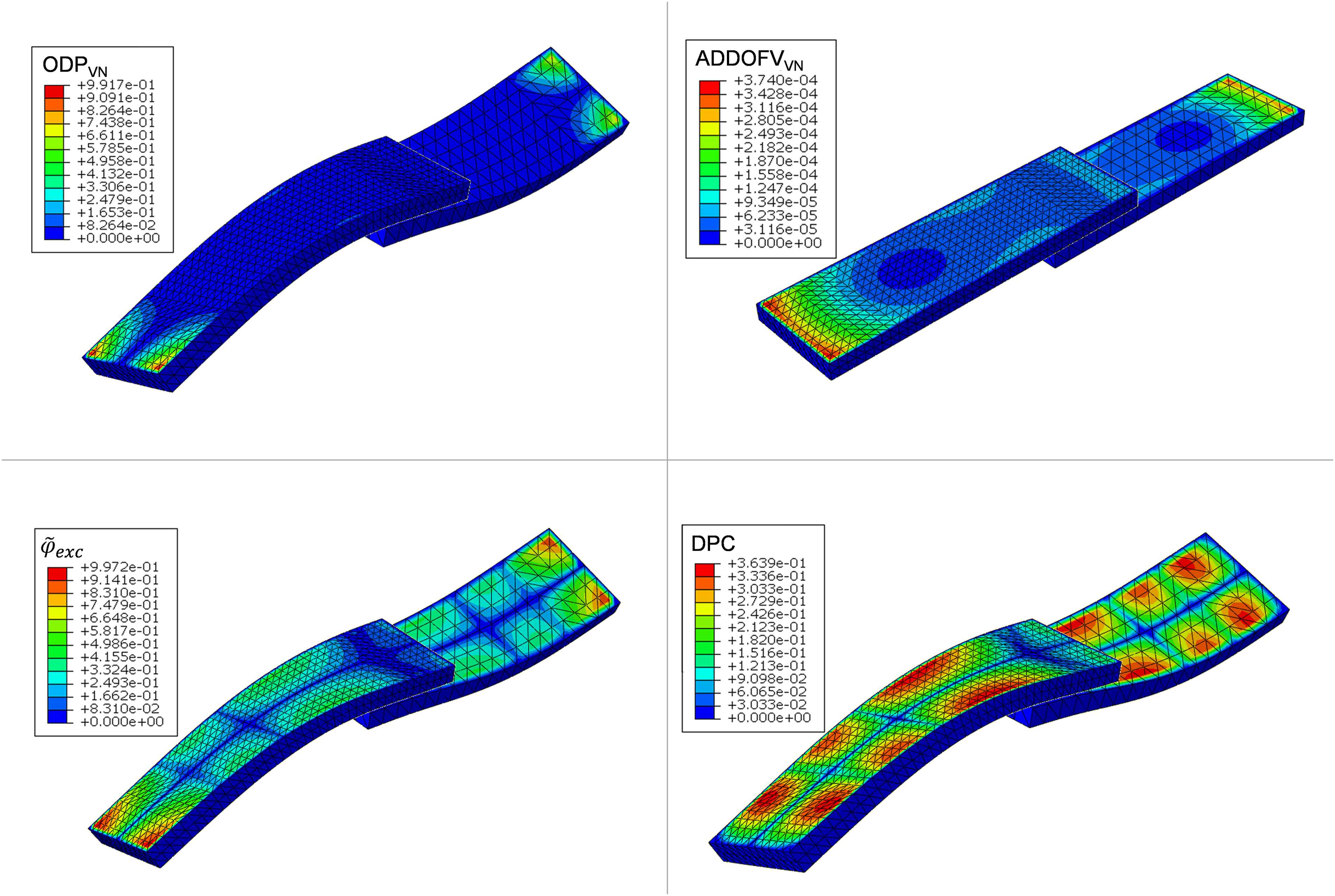
In the top left corner of Figure 4, the influence of the projection to the surface normals is shown by conducting the ODP calculation according to equation (1) with the vector normalized components according to equation (4)
3.3. Automated selection method
For complex structures, it is often not possible to find one single driving point where all modes can be excited. To identify as little driving points as possible nonetheless, driving points exciting several modes must be found which leads to the creation of groups of modes, which are each excited by one driving point. Identifying suitable driving points thus shifts from trying to identify the best point for all modes to finding the minimum amount of driving points which will sufficiently excite all modes of the system.
The corresponding method proposed as part of this work is depicted in Figure 5. Method for enhanced optimum driving point determination.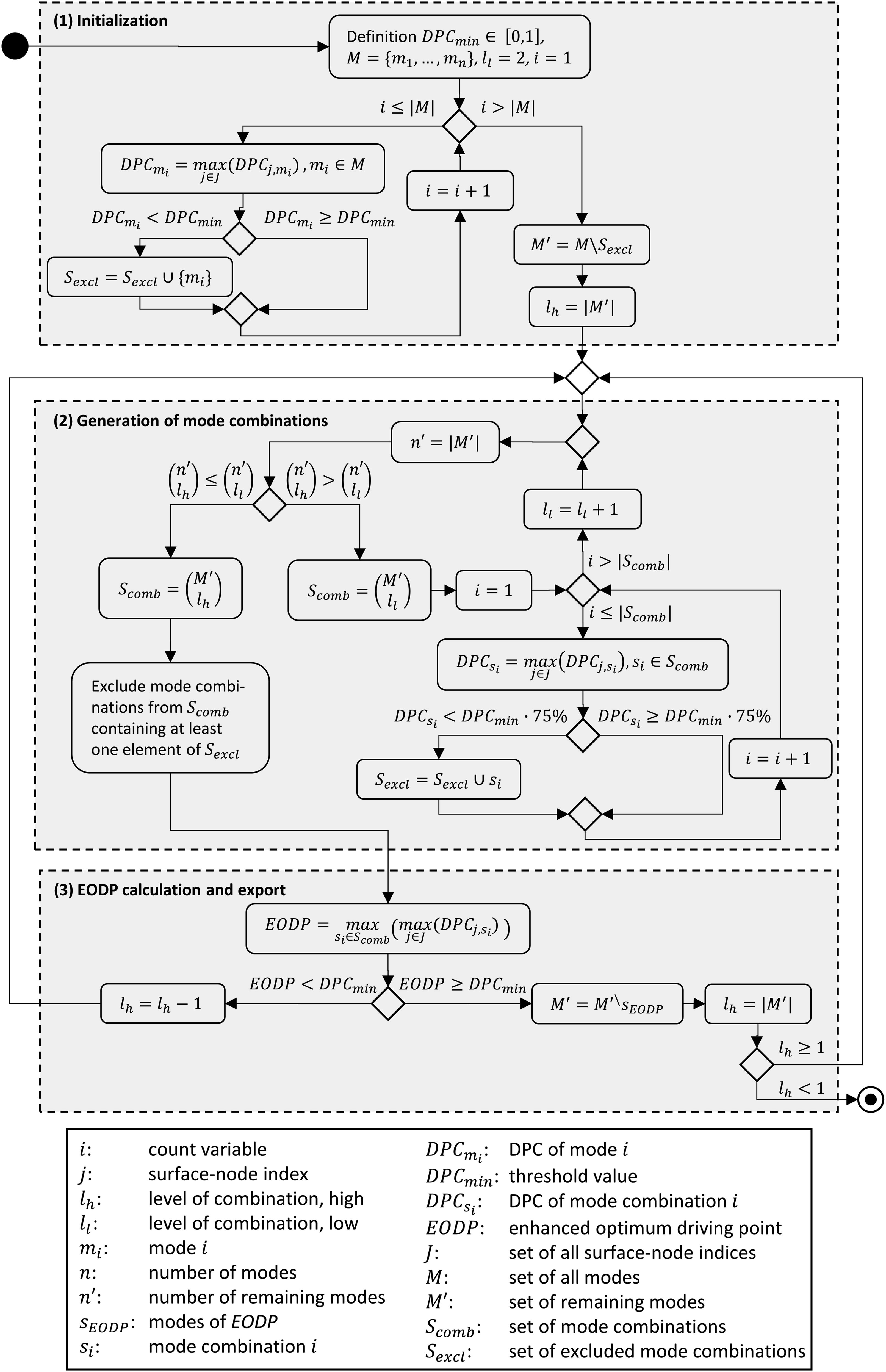
The input parameters to this method are the normalized projected eigenvector components for every mode
In the beginning, modes with an individual DPC smaller than the threshold value are excluded from the calculation and written into the set of excluded mode combinations
The second path in part (2) excludes ill-matching mode combinations from the combination calculation in order to minimize the calculation effort. This is done if the calculation of the lower combination level is faster than the one for the higher combination level. In this case, DPC values for all mode combinations of the corresponding lower combination levels are calculated and compared to a value 75% of the threshold value. If a mode combination is lower than this value, it will not be included in further combination calculations. 75% has been found to be suitable across applications and represents a tuning parameter for the engineer to weigh up calculation quality against calculation efficiency. The smaller the value, the lower is the increase of the computation efficiency. However, with a value of 100%, promising mode combinations are eventually ignored, since the values of
To demonstrate the presented automated selection method, the model presented in Figure 2 is used, considering 20 modes. The driving point indicator for all modes is 0.186 which is less than the defined threshold value of 0.3. Therefore, the modes are grouped into two groups which can be excited at the points marked in Figure 6. By the combined deformation of all the modes excited in the respective mode groups, it is clearly visible why two groups are necessary: The modes of the two plates act in two different planes which cannot be excited by one driving point. Result of enhanced optimum driving point calculation with threshold of 0.3 for 20 modes divided into two groups.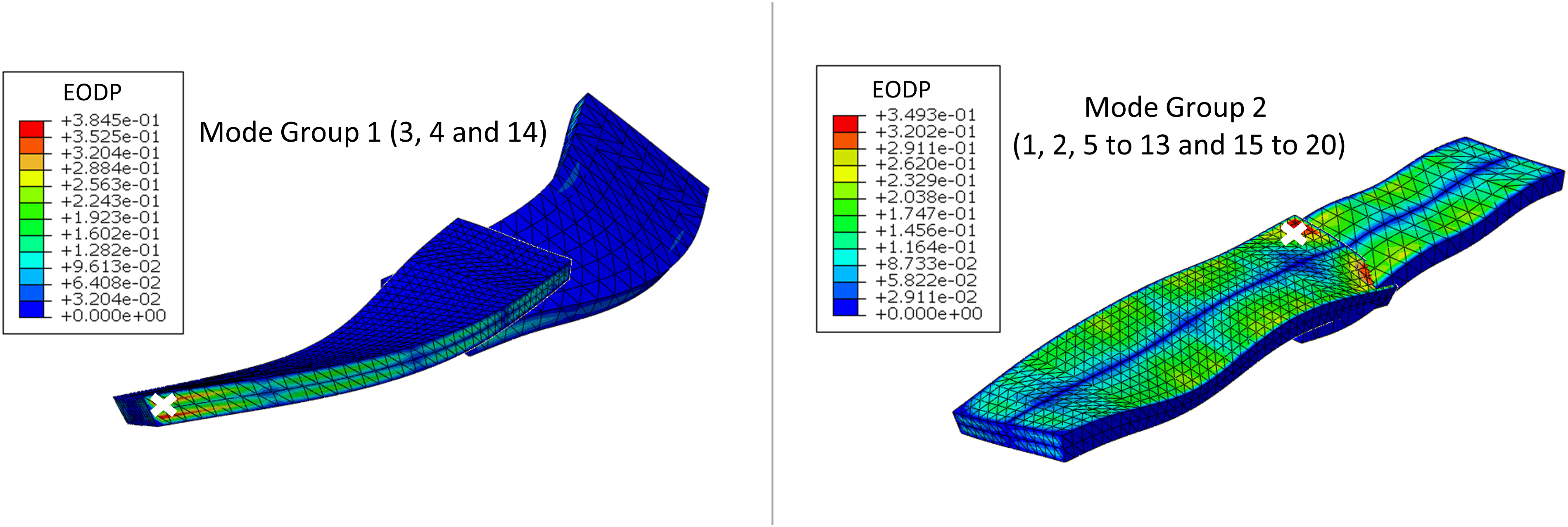
4. Validation
The developed EODP method is demonstrated on two practical application examples. The ODP according to equation (1) is calculated as a reference to the state-of-the-art method. The DOFs with the highest ODP respective EODP values are selected as driving points. The first application example is an aluminum beam structure with a high risk of double hits at many regions. The second application example is a gearbox housing of a tractor, which exhibits a high mode density and large surface area and thus many possible driving points.
Using NMA, the ODP and the EODP values are determined for all modes of the frequency range of interest. The deduced driving points are used for experimental modal testing. The structures are supported in free–free condition and excited at the calculated driving points with a modal hammer. The structure response is measured directly beside the driving point with an acceleration sensor in normal direction. By dividing the measured acceleration by the measured force, the frequency dependent FRF, the so-called driving point FRF, is calculated. Peaks in the FRF are indicating excited modes. The excited modes are automatically identified by using the complex mode indicator function, implemented in the analysis software ME’ScopeVES (Vibrant Technology, 2021). Subsequently, a comparison of the proposed and actually excited modes is made.
4.1. Academic beam
The first application is an aluminum beam, originally designed to study joint damping (Brake, 2018), depicted in Figure 7 on the left. As it is a light-weight structure, high surface velocities occur during impact measurements, thus posing a risk for double hits. Therefore, the proposed method has been applied to this example, to validate if the method allows for the identification of points less prone to double hits. A frequency range of 5 kHz has been chosen to include a total of eight modes in the relevant frequency range. Two groups of modes are necessary to account for the bending modes in both planes. Figure 7, the right one, shows the identified driving points according to the conventional ODP and the proposed EODP method. The coloring of the beam model corresponds to the combined deformation of the first EODP mode group. Left: configuration for experimental measurement; right: results of ODP and EODP calculation with the combined deformation of the modes of the first EODP mode group. Note: ODP: optimum driving point; EODP: enhanced optimum driving point.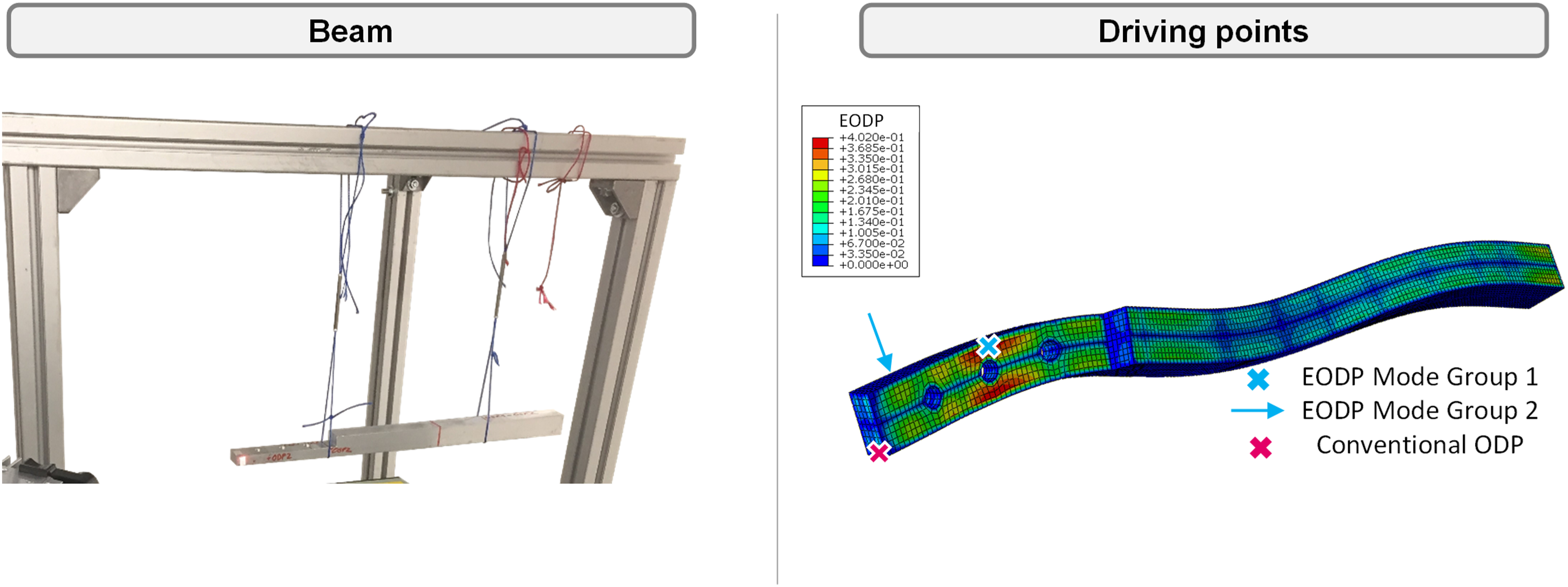
Impact measurements have been carried out in which ODP and EODP have been used for excitation. Several impacts have been conducted at both driving points for both mode groups. It was not possible to avoid double hits at the conventional ODP whereas it was easily possible at the EODP. The calculated and from the measured FRFs identified modes are compared in Figure 8, showing that the EOPD still excites all the modes in the corresponding mode groups. Excited modes with the enhanced optimum driving point calculation of the beam.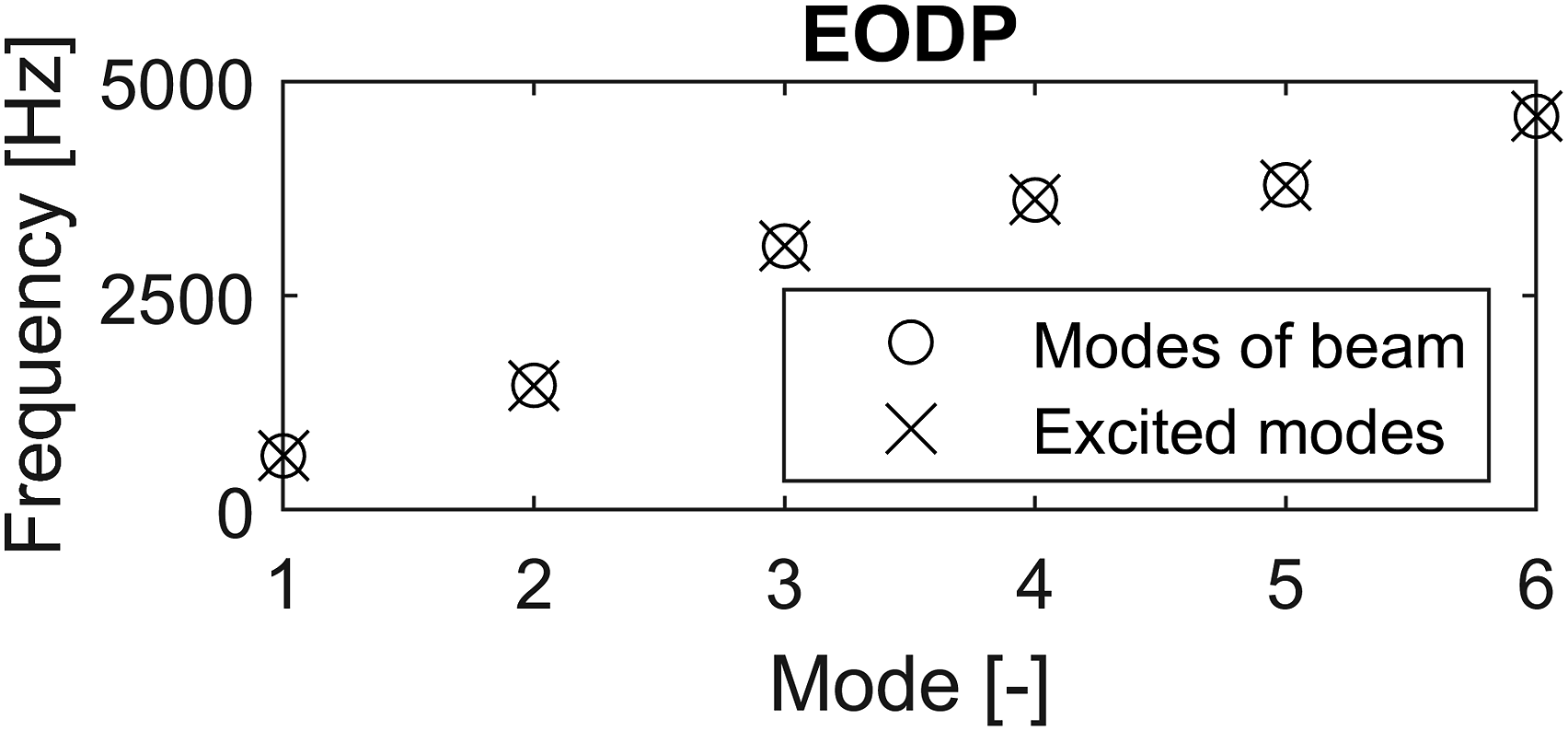
In conclusion, the application shows that the proposed method is able to identify driving points with a low risk for double hits even on critical components, such as light-weight parts. It therefore enables the test engineer to carry out EMAs faster and more reliable.
4.2. Tractor gearbox housing
The second application example is a gearbox housing of a tractor, also presented in Pasch et al. (2020). It aims at demonstrating the use of the presented method on complex examples. The assembly consists of nine separate parts, which are connected by screw connections, see Figure 9. The assembly has a complex geometry with many freeform surfaces and high wall thicknesses which renders double hits improbable. Gearbox housing of a tractor.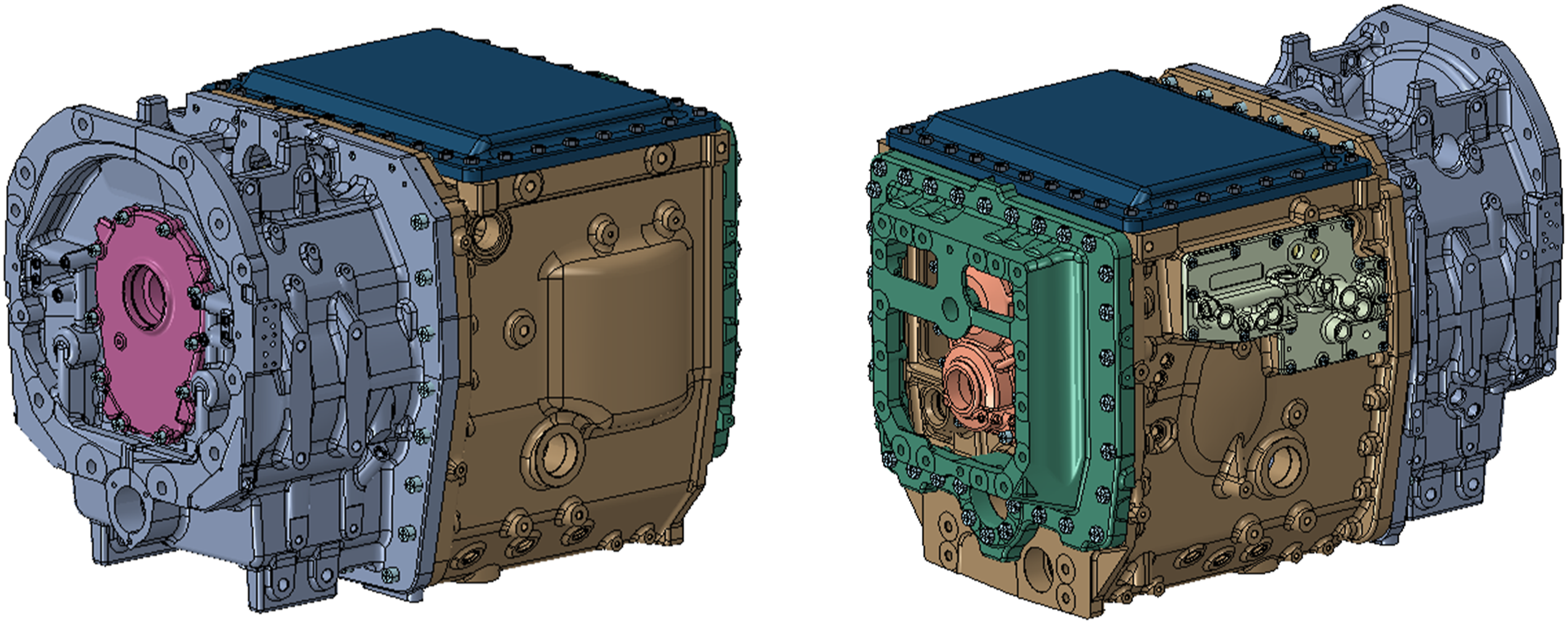
There are 22 modes in the frequency range of interest up to 1 kHz. Due to the high number of modes and high differences in the mode shapes, it is hardly possible to predict suitable driving points without a calculation method. The FE-model of the housing used in this study contains about one million surface DOFs each representing a possible driving point considered in the calculation.
The ODP according to equation (1) is shown in Figure 10, left. The calculation time of the ODP was 1.9 h. The highest value is found in the middle of the gearbox cover. In order to compare both methods, the highest (E)ODP values are selected as the driving point without additional interpretations according to a robust indicator for an automated selection method. Subsequently, the driving point FRF is determined on the real housing. The measurement setup is shown in Figure 10, right. Left: ODP for 22 modes, right: experimental measurement setup of the driving point FRF at the ODP. Note: ODP: optimum driving point; FRF: frequency response function.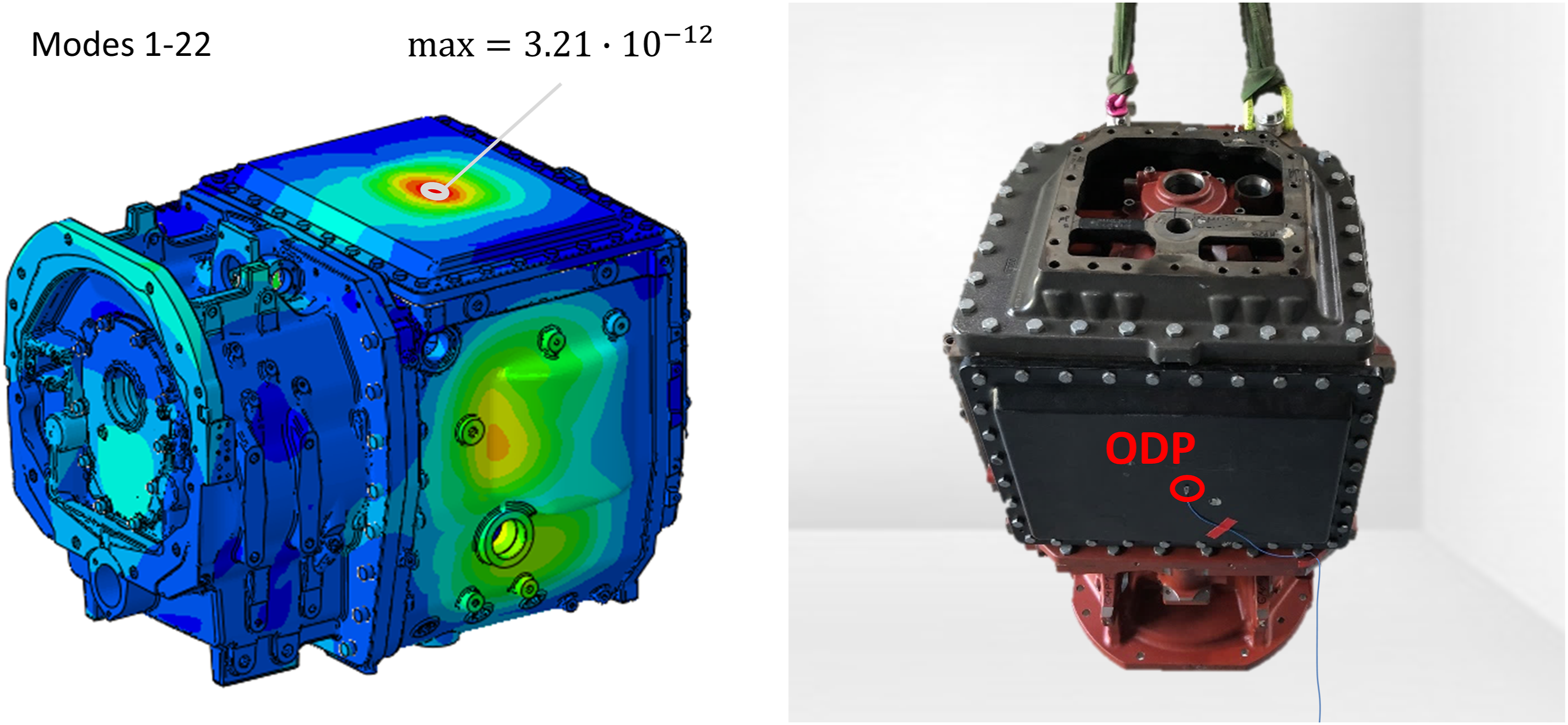
No double hits occurred when exciting the structure. The modes excited at the ODP were determined from the measured data and are shown in Figure 11. Excited modes with optimum driving point calculation for the gearbox housing.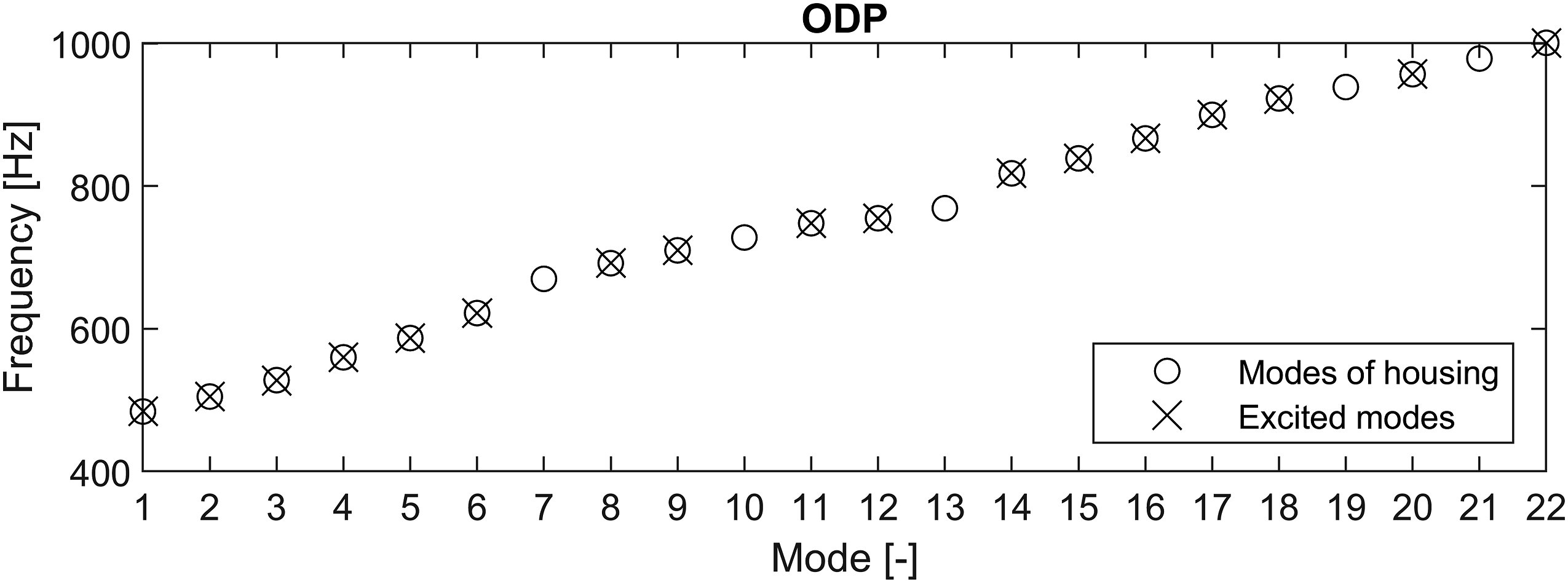
The diagram shows that only 17 out of the 22 modes of the relevant frequency range were excited. Five modes, mode 7, 10, 13, 19, and 21, were not excited at the calculated ODP. Therefore, using the calculated ODP as the driving point, a full EMA, and a full validation of a numerical model could not be performed.
Second, the EODP is calculated as presented in chapter 3.3. The threshold Enhanced optimum driving point for 22 modes with a threshold of 0.2.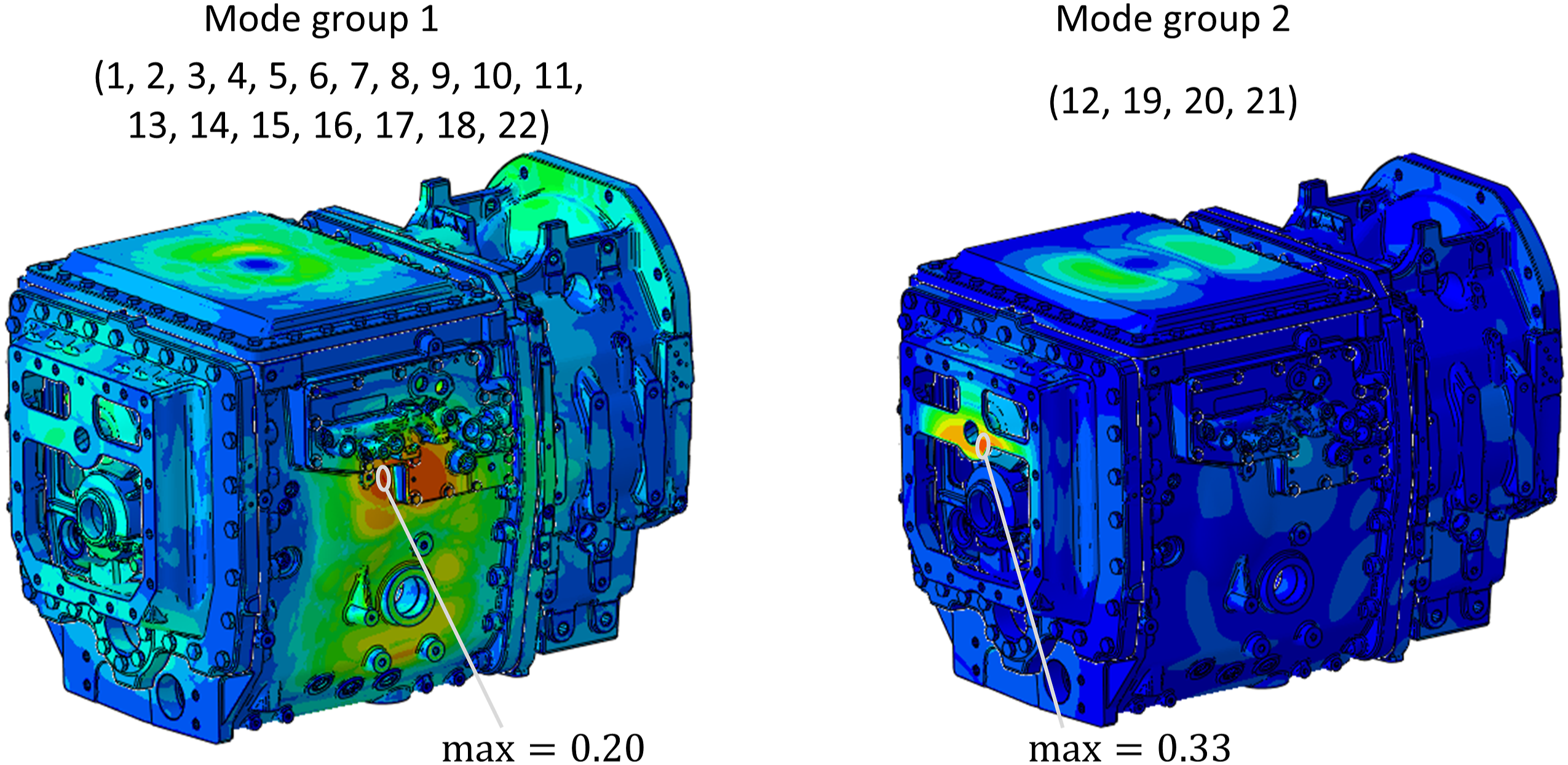
In the experimental test, no double hits occurred at the driving points. Using the two measured driving point FRFs, the excited modes were determined, see Figure 13. Excited modes with enhanced optimum driving point calculation for the gearbox housing.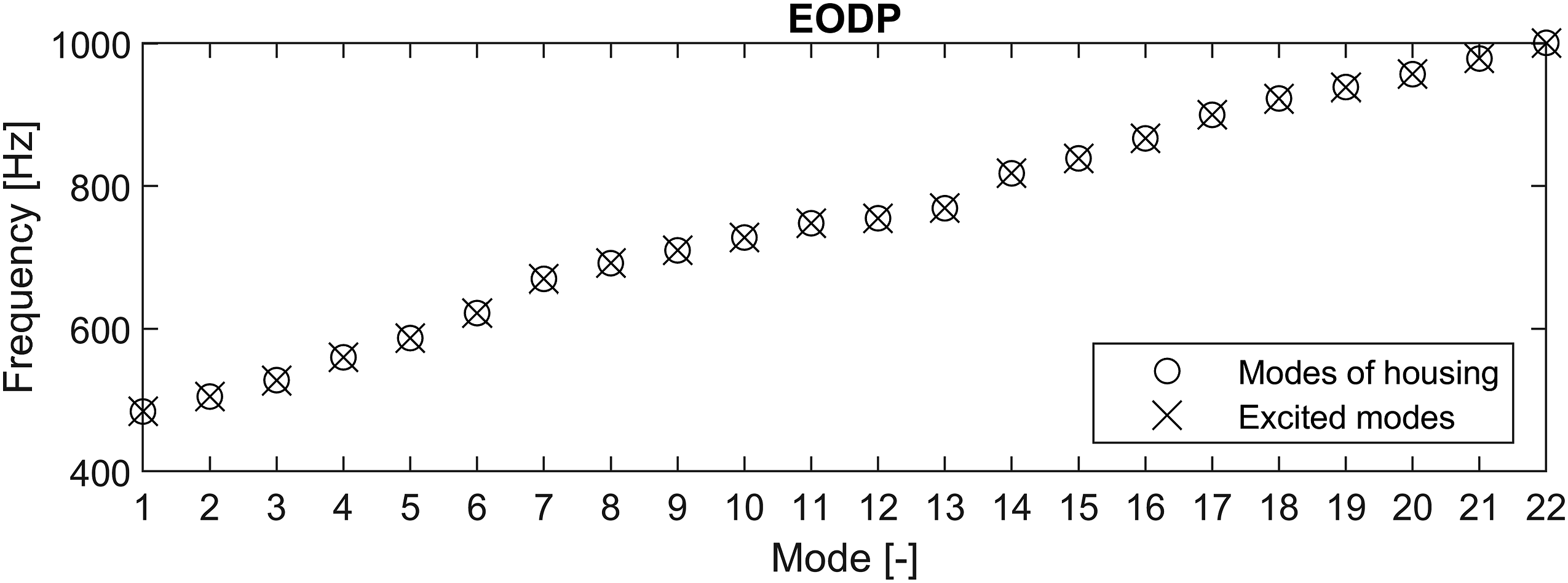
The results show that all 22 modes of the considered frequency range are excited with the predicted set of driving points. Therefore, the points are suitable for performing an EMA.
4.3. Discussion
The application examples underline that the state-of-the-art method is insufficient for the automated calculation of driving points. The academic beam shows the relevance of considering excitability and double hit prevention simultaneously. The tractor housing demonstrates that one single driving point is often not sufficient for practical structures with many modes.
Using the method proposed in this paper, driving points have been successfully predicted for both application examples. For both examples, all modes of the frequency range of interest were excited while no double hits occurred at the selected points during the measurement. Theoretically, there are more than four million
5. Conclusion and outlook
This paper presents a new method for driving point determination for practical modal testing. For this purpose, an evaluation criterion was presented to determine the excitation quality of possible driving points and possible mode combinations: the Driving Point Criterion (DPC). In the form of a comparable single-number value, this criterion considers the excitability of modes, the avoidance of double hits, the possible excitation direction, and the number of considered modes simultaneously. On the basis of the DPC, an efficient automated selection method is presented, which determines the optimum set of driving points. The result of the selection method are mode groups with a respective driving point location, the enhanced optimum driving point (EODP).
The method was implemented and applied for two different practical application examples. The validation with experimental modal hammer measurements demonstrates the practical use of the method. For both examples, all modes of the frequency range of interest were excited using the EODP, whereby double hits were avoided.
In further work, automated methods for determining the minimum necessary response positions and the optimal suspension positions for modal testing of complex structures are to be developed by using the indicator values presented.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.