
Abstract
A braking index that incorporates the risk perception of human drivers has been developed to estimate how many drivers would brake in a given situation. We used agent simulations to verify whether incorporating the braking index can improve the efficiency of the agents’ movement in the whole space. The completion time and the number of collisions were measured to compare the simple avoidance algorithm without the braking index and the proposed algorithm with it. While a simple avoidance algorithm showed a strong trade-off between the completion time and the number of collisions, the proposed algorithm resulted in an efficient movement with a shorter time and fewer collisions. More efficient movement could be achieved by incorporating human risk perception because the risk of collision with others was individually evaluated according to others’ position and direction, and only as much avoidance as necessary was performed.
Keywords
Introduction
Cooperation and Risk Perception
Cooperative behavior is important in the field of transportation. Cooperative behavior not only promotes efficiency and safety (Fiosins et al., 2016; Fujii et al., 2010) but also provides positive emotions to traffic participants (Zimmermann et al., 2015). Various algorithms for path selection and speed coordination have been proposed to implement cooperative behavior in the field of robotics (Heesen et al., 2012; Kong et al., 2022). Although these algorithms have in common that they consider others and make their decisions based on others’ position and speed, they do not incorporate the subjective risk perceived by humans. Recent research in traffic psychology has focused on subjective evaluations, such as risk perception and comfort. Specifically, there is a discrepancy between the risk calculated from physical quantities such as distance and speed and the risk perceived by human drivers and pedestrians (Lehtonen et al., 2016; Petit et al., 2020). This discrepancy also causes discomfort (Deligianni et al., 2017; Kraus et al., 2010). These findings on human risk perception are expected to be used for advanced vehicle control (Hasegawa et al., 2018).
Braking Index
As part of this work, the authors developed a braking index that incorporates the risk perception of human drivers (Matsubayashi et al., 2024). This index estimates how many drivers would brake in a given situation, based on the relative positions and relative speeds of themselves and others. Specifically, the closest point of approach is determined from the relative distance and speed, and the braking rate is estimated from the distance to the closest point of approach and the time to the closest point of approach (Equation 1; Matsubayashi et al., 2024).

A situation with a high braking rate is considered to be an uncooperative situation where two agents are interrupting each other. The estimated braking rate also shows a strong positive correlation with the risk evaluation from a third-person perspective, indicating its high validity (Matsubayashi et al., 2024). This is because the constants in the equation are obtained by measuring and regressing the behavioral data of whether the human drivers brake or not. Thus, the braking index incorporates the drivers’ risk perception and allows us to represent uncooperative situations with continuous values between 0 and 1. The agents’ avoidance algorithm with this braking index is expected to achieve efficient movement.
Objective
In this study, we use agent simulations to verify whether incorporating the braking index can improve the efficiency of the agents’ movement in the whole space. Specifically, we investigate whether agents in the experimental condition with the braking index reach their goals faster and with fewer collisions with others than agents in the control condition without the index.
Method
Stimulus
A 500 by 500 pixel virtual space was developed in which the agents could move in two dimensions, like a shopping mall (Figure 1). The agents were displayed with a radius of 5 pixels, and each agent was set to take 500 steps toward its goal.
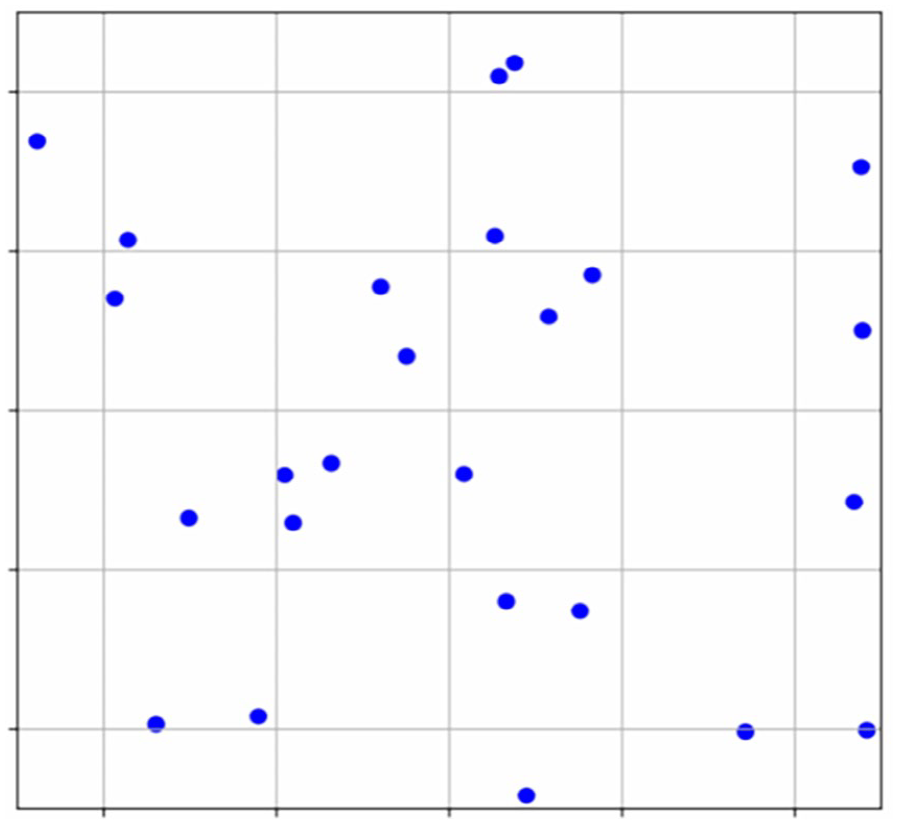
Overview of simulations.
In the control condition, a simple avoidance algorithm was implemented for all 25 agents. The agents generated avoidance vectors in the opposite direction of others approaching within a 50 pixel radius of their field of view. The goal vector and the avoidance vector were combined to determine the direction of the next step. The size of the avoidance vector was fixed between 1 and 5 pixels. In the experimental conditions, the braking rate was calculated from 0 to 1 based on the relative position and speed of two agents, and an avoidance vector was generated based on it. In other words, although the size of the avoidance vector was the same regardless of relative position and speed with other agents in the control condition, the size of the vector was individually adjusted for each other agent based on the relative position and speed in the experimental condition.
Performance was measured as the sum of completion time and number of collisions. Completion time and number of collisions were expected to be inversely proportional to each other, as there was a normative trade-off between them (Figure 2). The initial positions and directions of agents were randomized, and 100 simulations were run for each condition.
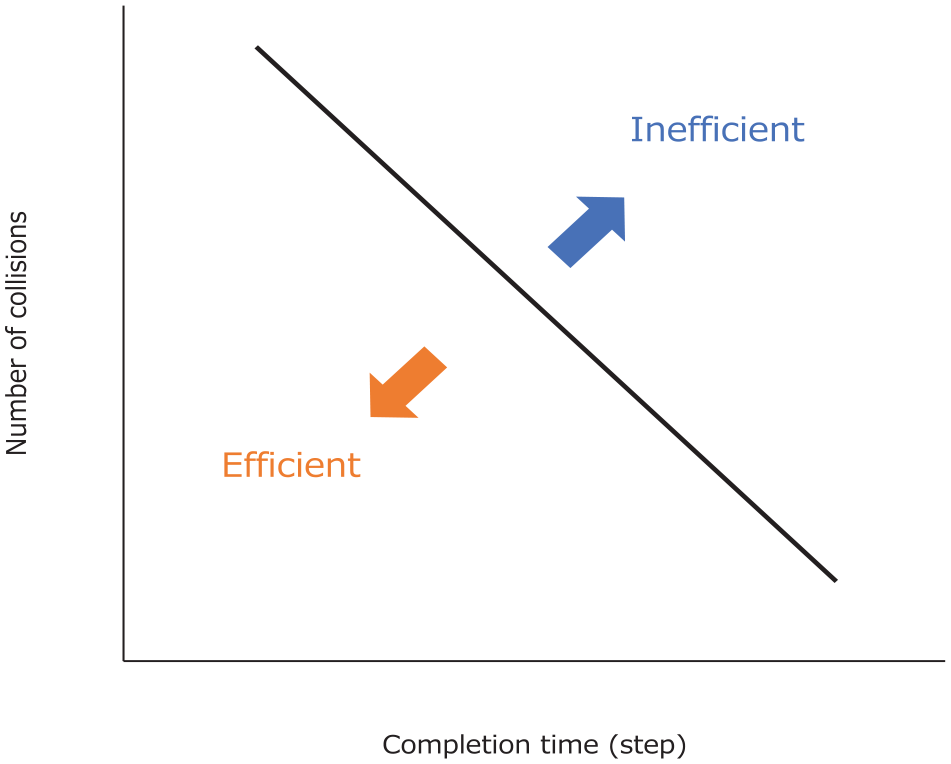
Expected trade-off relationship between the completion time and the number of collisions.
Results
Basic Comparison
First, we examined the completion time and the number of collisions when the size of the avoidance vector was 1 to 5 pixels in the control condition (Figure 3). The results showed that, as expected, there was a trade-off between the completion time and number of collisions. The smaller the size of the avoidance vector, the shorter the completion time, but the greater the number of collisions, and vice versa (1 px: time = 17.2, collision = 5.37; 2 px: time = 18.9, collision = 1.89; 3 px: time = 21.0, collision = 0.78; 4 px: time = 22.5, collision = 0.52; 5 px: time = 23.6, collision = 0.48). On the other hand, the experimental condition with the braking index had fewer collisions than the control condition with a similar completion time and a shorter completion time than the control condition with a similar number of collisions (time = 17.9, collision = 1.85). In other words, the experimental condition resulted in a more efficient movement than the control condition.
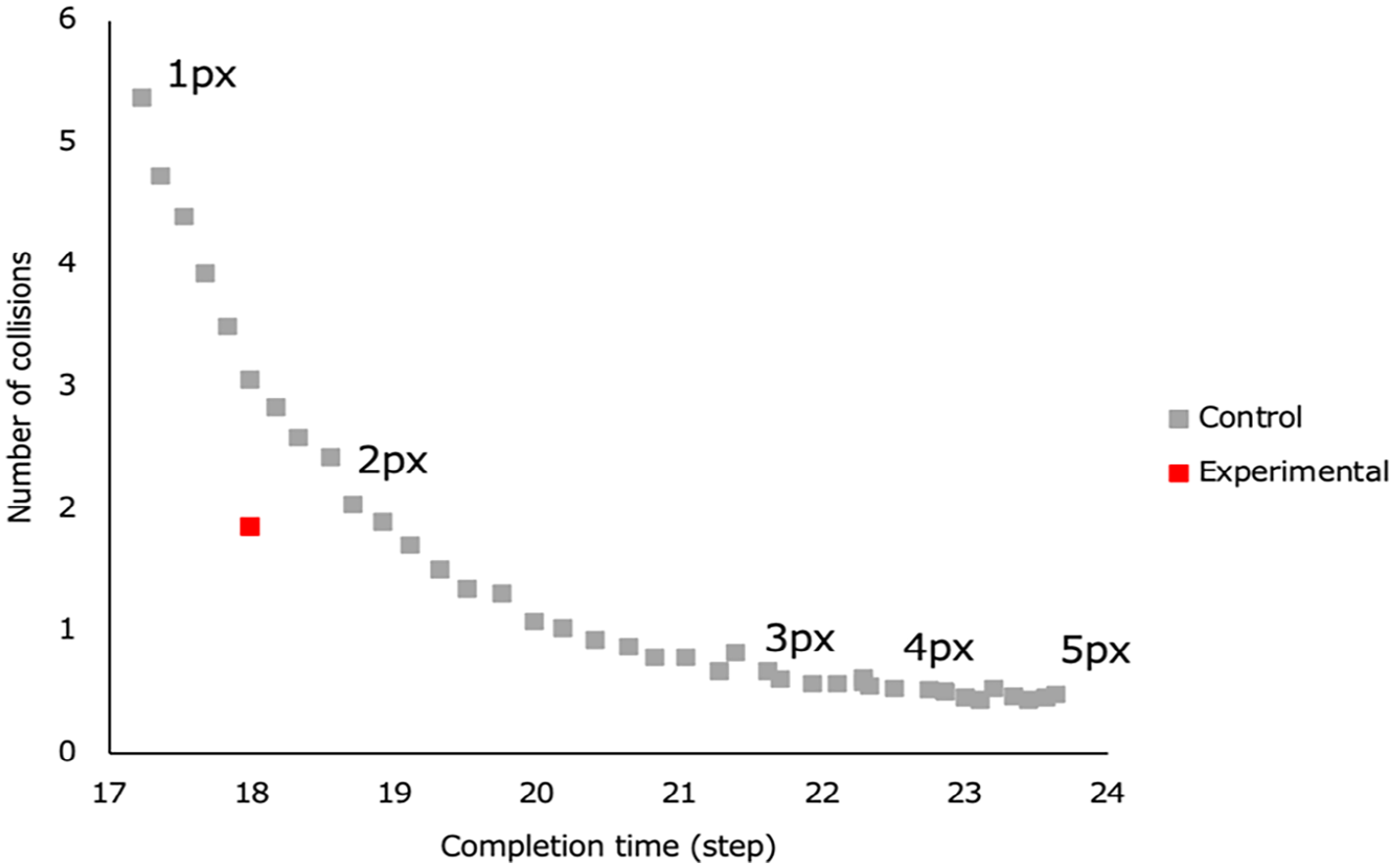
Results of the completion time and the number of collisions.
Extended Comparison
The same comparisons were also made when the number of agents was increased to 50 and 100, and when the field of view was reduced to 180, 120, and 50 degrees (Figures 4 and 5). The results showed that the same strong trade-off was observed in the control condition. Under such a trade-off, the experimental condition also resulted in more efficient movement with shorter completion times and fewer collisions in each situation than the control condition.
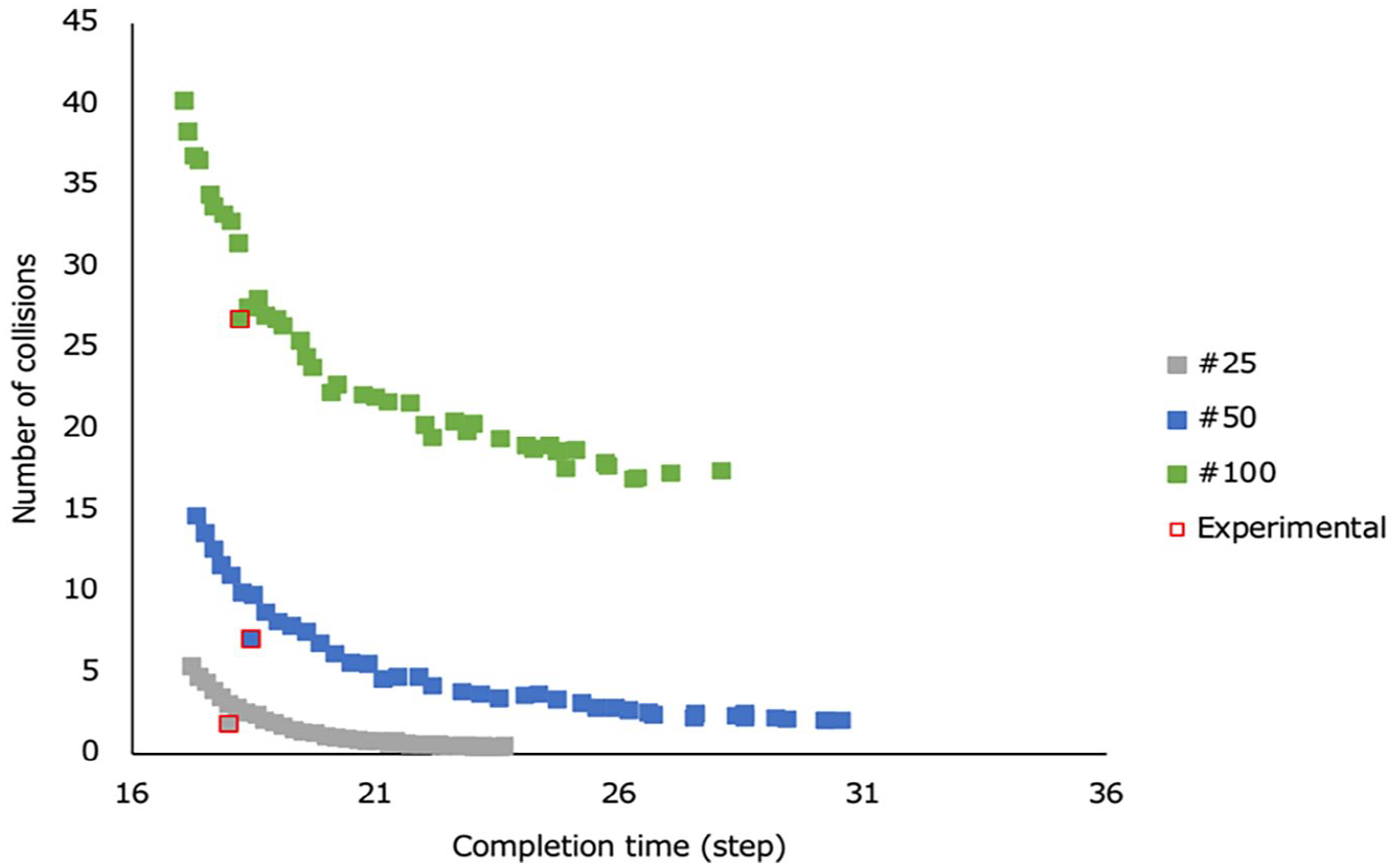
Results of the completion time and the number of collisions as a function of the number of agents.
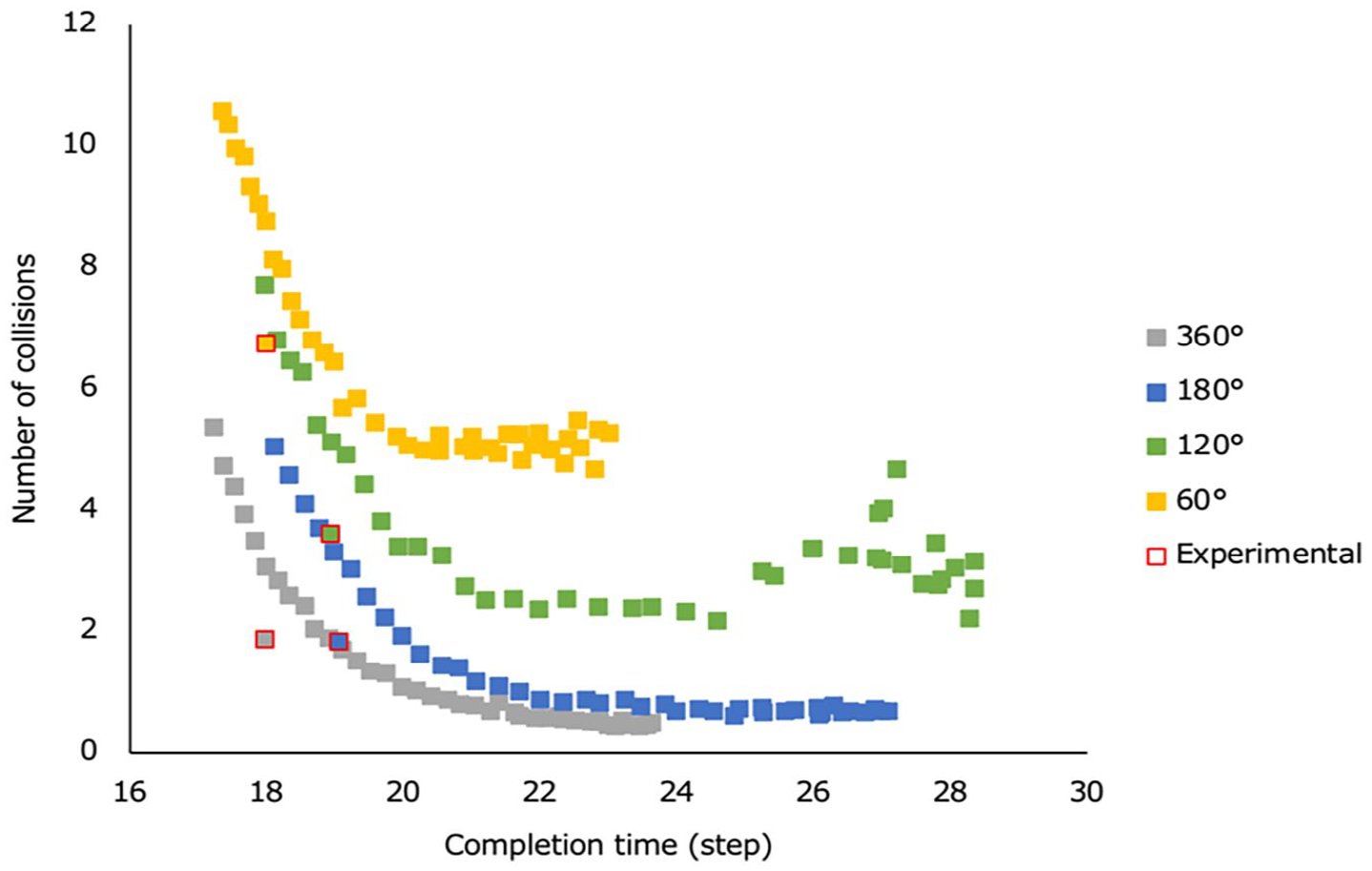
Results of the completion time and the number of collisions as a function of the view angle.
Discussions
In this study, we verify whether incorporating the braking index can improve the efficiency of the agents’ movement in the whole space. While a simple avoidance algorithm showed a strong trade-off between the completion time and the number of collisions, the algorithm proposed in this study resulted in an efficient movement with a shorter time and fewer collisions under the same trade-off as the control condition. Therefore, more efficient movement could be achieved by incorporating human risk perception. This is because the risk of collision with others was individually evaluated according to others’ position and direction, and only as much avoidance as necessary was performed. For humans, large avoidance involves large body movements, which are considered cooperative costs (Stoll et al., 2019, 2020). Human risk perception may have implicitly included this cost. In addition, when the number of agents was increased or the field of view of the agents was reduced, the efficient movement remained in the experimental condition. This means that the avoidance algorithm within human risk perception is efficient and effective even in crowded situations or in situations with poor visibility and poor sensors, indicating that human risk perception is useful for the development of advanced vehicle control (Hasegawa et al., 2018). Furthermore, if we consider the completion time as a benefit to oneself and the number of collisions as a benefit to others, we can conclude that vehicle control within risk perception is beneficial to both oneself and others.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Support for this work was given by JSPS KAKENHI Grant Number 22H03912 and 22H00211, and Toyota Motor Corporation (TMC) supported this work. However, note that this article solely reflects the opinions and conclusions of its authors and not TMC or any other Toyota entity.