
Abstract
Inappropriate use of advanced driver assistance systems (ADAS), such as adaptive cruise control (ACC) and lane keeping assistance (LKA), may cause safety issues. In a driving simulator experiment, we examined how a specific driver characteristic, locus of control in traffic (T-LOC), influences the use of ADAS. It was found that without any ADAS training, the Self dimension of T-LOC, measuring the extent to which one believes they are responsible for their driving safety, was negatively correlated with time spent on secondary tasks after environmental cues became visible indicating a possible need for takeover. Further, with a responsibility-focused training, drivers with higher Self scores tended to take control over faster when necessary. The findings highlight the role of individual differences in the formation of driver behaviors associated with ADAS use. Investigation of other driver characteristics and incorporating them to the design of training paradigms are suggested.
Objectives
Advanced driver assistance systems (ADAS) hold the potential to improve driving safety, however, the safety benefits can only be achieved with drivers’ appropriate use of the systems given their current limitations (Masello et al., 2022; Pradhan et al., 2022; Weaver et al., 2022). Many factors can influence how drivers use ADAS, including drivers’ individual characteristics. This research examined one of the understudied individual characteristics, locus of control in traffic, and its association with how drivers use two common ADAS, adaptive cruise control (ACC) and lane keeping assistance (LKA). Further, this research explored how ADAS training might influence these associations.
Locus of control refers to an individual’s belief about the underlying main causes of events in their life (Rotter, 1966). The Traffic Locus of Control (T-LOC) was developed to assess the extent to which drivers attribute driving safety to four dimensions: self, other drivers, vehicle/environment, and fate (Özkan & Lajunen, 2005). Specifically, previous research has found positive associations between the self dimension (T-LOC-Self) and self-reported traffic crashes, driving violations and errors, and speeding (Özkan & Lajunen, 2005; Warner et al., 2010).
Past research has investigated training to support appropriate trust and use of ADAS. Training on situations that are beyond ACC capabilities was found to reduce willingness to use ACC in those situations (Bianchi Piccinini et al., 2015) and adding drivers’ responsibilities to basic ACC training which includes ACC’s functionality, operation, and limitations may lower disuse (Zheng et al., 2023). ACC training has also been found to generate better mental models compared to trial and error (Carney et al., 2022).
We report analysis from a driving simulator study which tested two training approaches (one focused on the limitations of ADAS and the other focused on drivers’ responsibilities) as a between-subjects factor and compared the performance to that of a group of drivers without any training (for details of the training contents, see DeGuzman & Donmez, 2022, p. 3). The participants also filled out the T-LOC questionnaire. We hypothesized that without specific ADAS training, drivers with lower T-LOC-Self may believe less in their opportunity to improve driving safety (as it reflects the extent to which one believes they are responsible for their driving safety) and thus may have higher tendency to overtrust ADAS. We also hypothesized that with proper training, the relation between T-LOC-Self and ADAS use may diminish.
Approach
Drivers were randomly assigned to three experimental conditions. To evaluate how drivers use ADAS, participants drove a series of highway and rural scenarios and were encouraged to use ACC and LKA together as much as possible, after manual and ADAS-engaged practice drives. A self-paced visual-manual secondary task mimicking searching for a song on an in-vehicle infotainment system was available to participants throughout the drive (for details of the secondary task, see Donmez et al., 2007). Participants wore a head-mounted eye tracker to record glances to the road and secondary task.
Four action-not-necessary events (A-not-N), where ACC had enough distance to slow the vehicle and avoid a collision, and four action-necessary (A-N) events, where the driver needs to intervene to avoid a collision, were programmed into the scenarios for each participant (event order counterbalanced). Participants filled out the T-LOC questionnaire at the end of the experiment.
Percentage of time looking at the secondary task during the 20 s before a cue indicating a potential event (i.e., before cue onset), and during the time window between the cue onset and the event onset or when automation was disengaged by participant, whichever happened first (i.e., after cue onset), was calculated (for details of the cues, see He et al., 2021). Takeover time in A-N events was also calculated as the time from the driver deactivating ADAS to event onset, with smaller values indicating earlier takeover. Correlations between the T-LOC-Self and these performance variables were calculated for all three groups and then compared.
Findings
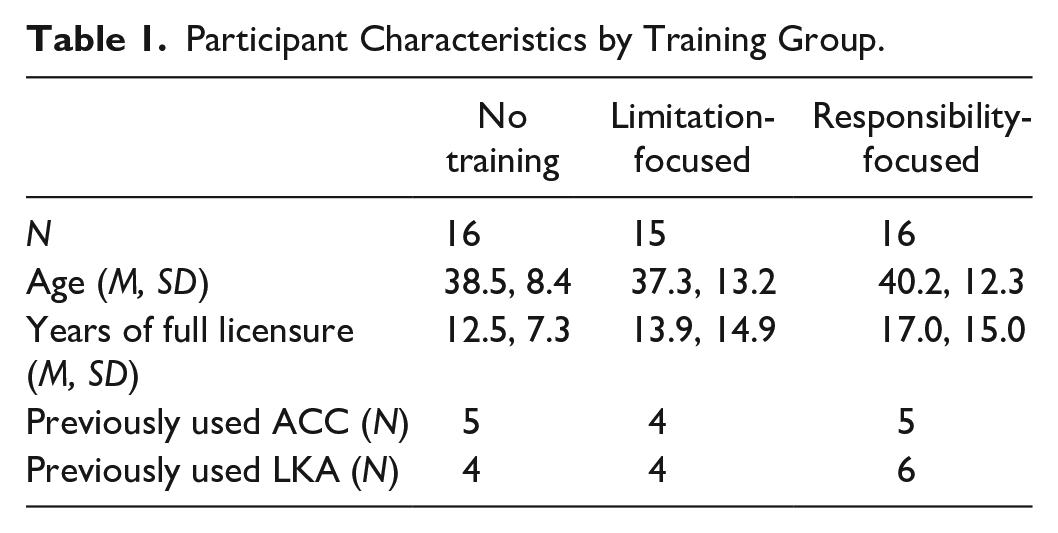
Forty-seven drivers completed the experiment (Nno training = 16, Nlimitation-focused = 15, Nresponsibility-focused = 16, for demographic information, see Table 1). For the no training group, there was a negative correlation (p = .06) between T-LOC-Self and percent time spent looking at the secondary task after cue onset (see Table 2). There was no correlation for the training groups. These findings were in line with our hypothesis.
Participant Characteristics by Training Group.
Correlations Between T-LOC-Self and Driver Behavior Measures.
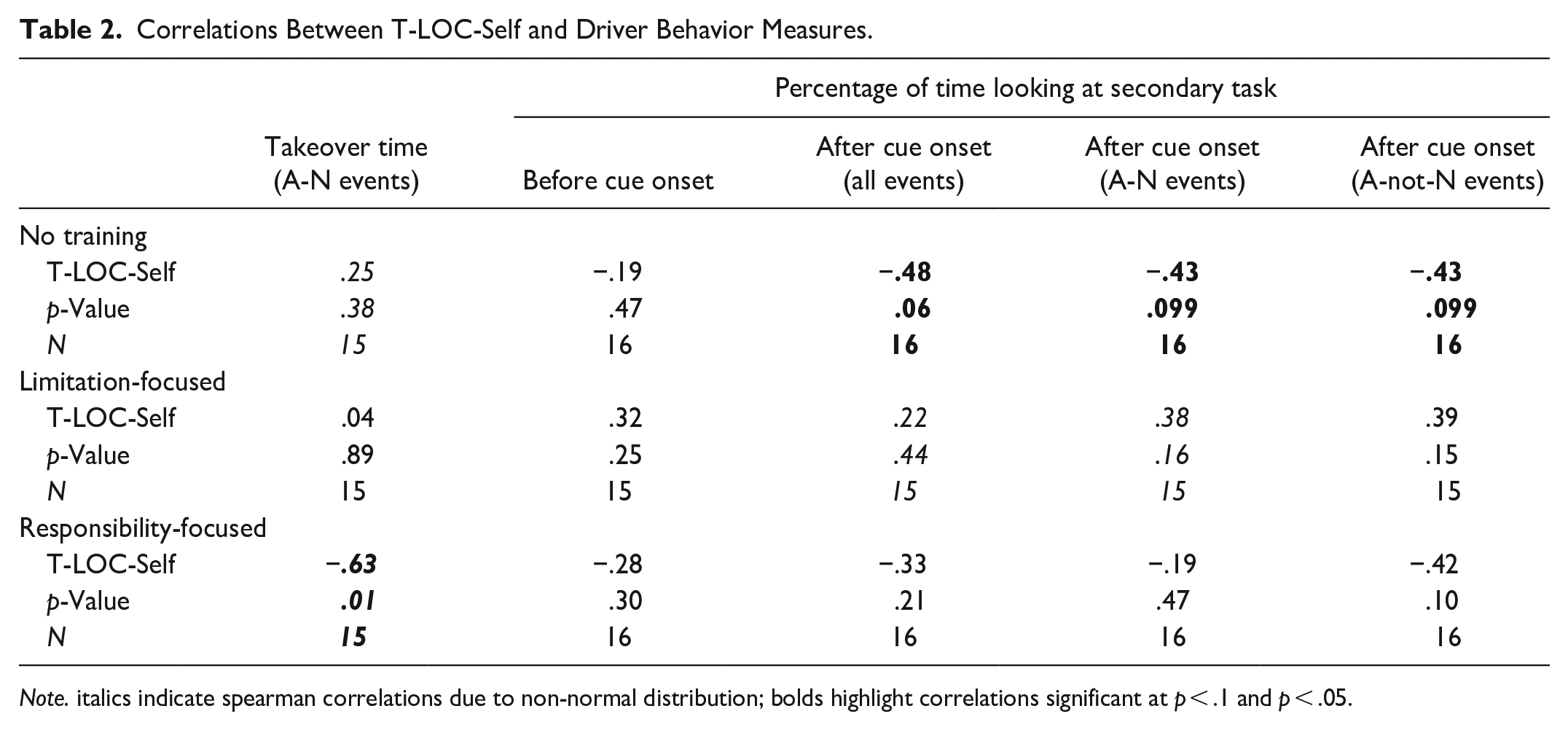
Note. italics indicate spearman correlations due to non-normal distribution; bolds highlight correlations significant at p < .1 and p < .05.
Regarding takeover time, no significant correlation was found for the no training and limitation-focused training groups. However, a significant negative correlation between T-LOC-Self and takeover time was found for the responsibility-focused training group (Table 2). Thus, drivers who report a higher T-LOC-Self may benefit more from the responsibility-focused training.
It should be noted that only one dimension of one individual characteristic, T-LOC-Self, was explored in this research, and the sample size for each experiment condition was relatively small. These limitations should be considered when interpreting the results. Experiments examining more individual characteristics and measuring driver’s ADAS use before and after training are planned for future research by the authors.
Takeaways
This study examined the correlation between T-LOC-Self and how drivers use ADAS, and explored how training may influence the correlation. The results provide some evidence that T-LOC is associated with driver behavior in the presence of ADAS. The less drivers attribute driving safety to themselves, the more they may rely on ADAS when no training is implemented. Furthermore, drivers with higher T-LOC-Self took over sooner in response to a critical event when responsibility-focused training was implemented, but this effect was not observed in other training conditions.
Based on these findings, future research may further examine the role of psychological factors on driver-ADAS interaction and how these factors may affect the impact of ADAS training on driving behavior. Although research has examined the relationship between psychological factors and aberrant/risky driving behaviors without ADAS, the investigation of psychological factors in the context of driver-ADAS teaming is scarce. Research with larger samples and including other characteristics, such as risk perception or attitudes toward traffic safety, can further our understanding of these relationships. Long-term behavioral changes due to different trainings may also be explored in future research. Identifying how individual differences may influence training outcomes can inform tailored ADAS training to maximize benefits to driver-ADAS teaming performance.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Sciences and Engineering Research Council of Canada (NSERC) [RGPIN-2016-05580].