
Abstract
As societies transition to hybrid mobility systems, interactions between automated vehicles (AVs) and human users in public spaces become more complex, highlighting the critical role of prosocial behaviors. These behaviors are essential for the seamless operation of interdependent transportation networks, helping to address integration challenges of AVs with human-operated vehicles and enhancing well-being by creating more efficient, less stressful, and inclusive environments. This study explores the impact of receiving prosocial behaviors on the cognition, riding performance, and well-being of micromobility users in simulated urban traffic scenarios. Using a mixed-method design, the research contrasts two types of social interactions—prosocial and asocial—across three temporal conditions: relaxed, neutral, and urgent. The Structural Equation Modeling underscored the intricate relationships between prosocial behaviors, satisfaction, cognition, riding performance, and well-being. Incorporating social factors into driving systems could enhance safety and improve urban mobility solutions.
Objectives
Prosocial behaviors, which are actions intended to benefit others, assume increased importance in hybrid societies where autonomous technologies and human interactions coexist in public spaces (Harris et al., 2014; Sauer et al., 2019). They are essential for the smooth functioning of an interdependent transportation environment, especially in hybrid mobility societies where cooperative interactions can mitigate the potential challenges posed by the integration of autonomous vehicles and human-operated systems. They are also significant in enhancing the well-being of individuals by creating more efficient, less stressful, and more inclusive transportation experiences (Vella-Brodrick et al., 2013). Research on how interdependent transportation elements affect well-being remains limited, lacking concrete methods, theories, and measurements for driver well-being. This study aims to explore the impact of diverse social situations on drivers’ well-being under “Game of Chicken” conditions, where the outcome of each person depends on the cooperative behavior of the other: if both compete, the outcome is worse than when one cooperates and the other doesn’t.
The concept of enhanced well-being through social interactions is extended to transportation, emphasizing the importance of prosocial behaviors among road users. Such interactions not only improve emotional health but also satisfy psychological needs for competence and relatedness, leading to greater overall satisfaction (Aknin et al., 2013; Aknin et al., 2011; Dunn et al., 2014). In the context of transportation, this translates to mutual benefits from cooperative actions among drivers, pedestrians, and riders, suggesting that fostering prosocial behavior in transportation settings can significantly enhance a driver’s well-being and contribute to a more harmonious coexistence on the road.
Attention Restoration Theory (ART) posits that nature exposure enhances executive functions and replenishes cognitive resources, while prosocial behaviors like kindness boost cognitive function and alleviate stress through positive social connections (Atchley et al., 2012; Kaplan & Kaplan, 1989; Parks et al., 2012; Piff et al., 2010). Both activities engage the brain’s default mode network (DMN), associated with introspection and social cognition, indicating their potential to improve cognitive and emotional well-being (Immordino-Yang et al., 2009; Waytz et al., 2012). This study investigates these effects in driving scenarios, employing cognitive tasks from nature research to assess well-being, aiming to enhance driver wellness through urban mobility design. In essence, this study examines the impact of prosocial behaviors on individual well-being in urban mobility, using interdependence to analyze social interactions in shared spaces and technologies. This is based on a driving simulator study that found positive social interactions can lessen aggressive behavior influenced by waiting times and frustration (Abou-Zeid et al., 2011)
Our experiment created scenarios with prosocial and asocial interactions to test their effect on riders, hypothesizing that prosocial interactions improve well-being and efficiency. We defined prosocial behavior as actions that benefit others, using a game theory approach. Our study used the Chicken Game in road situations to examine decision-making under mutual risk, showing that prosocial actions can enhance collective outcomes and individual well-being (Kollock, 1998; Rapoport & Chammah, 1965; Woodward, 2009). This approach analyzed how road users coordinated in shared spaces, investigating whether prosocial behaviors like yielding or adjusting speed create safer, more harmonious environments and improve overall well-being (Gärling & Fujii, 2009). The research contributes to integrating social factors into driving systems and practices, enhancing safety and driver well-being.
Approach
We recruited 201 participants via the Prolific web platform, they aged 20 to 55 years (M = 37.84, SD = 22.84) including 91 males, 108 females, and 2 non-binary. All were required to reside in the U.S. and hold a valid driver’s license to ensure familiarity with similar traffic rules. One non-attentive participant was excluded based on attention checks from Prolific. Participants received $4.00 for 30 min of participation, provided informed consent, and the study was approved by the institutional review board at University of Wisconsin-Madison.
The study used a web-based simulator on the Unity platform (v. 3.4.2) (Haas, 2014), featuring a suburban city environment with publicly purchasable 3D assets. Interdependent events were defined as scenarios requiring coordination between ego riders (the participants) and pedestrians over shared space. Using the Game of Chicken framework, the study examined the outcomes of prosocial (yielding) and asocial (non-yielding) behaviors in these conflicts (Rapoport & Chammah, 1965; Stroop, 1935). Pedestrian behaviors varied to increase or decrease collision risks, and time constraints (relaxed, neutral, pressed) were manipulated to study their influence on riders (Figure 1).

Sample scenarios for ego rider trials. Green and blue arrows indicate pedestrians’ prosocial and asocial paths, respectively. The ego rider’s straight path interacted with pedestrians, and was constrained by an invisible wall that blocked detours. The interactions were structured from left to right in three stages: Approaching, Merging, and Crossing.
Our 2 × 3 × 3 mixed-design study evaluated these different social behaviors and time pressure on rider well-being, with time conditions (relaxed, neutral, and pressured) as within-subject factors and pedestrian sociality (prosocial and asocial) as a between-subject factor. Cognitive capacity was assessed using the Stroop task, with measures of error rate (Stroop, 1935). Subjective well-being was measured using the PANAS-SF and Satisfaction with Travel Scale (STS), evaluating changes in affect and travel satisfaction (Crawford & Henry, 2004; Ettema et al., 2011). Riding performance was gauged using trajectory changes and Minimum Time to Collision (TTC) (Van den Berg et al., 2012).
Structural Equation Modeling (SEM) is a widely used tool in behavioral sciences (Hox & Timo, 1998) that reveals the interplay between latent and observed variables, as well as among latent variables themselves. We applied SEM to examine the impact of given prosocial/asocial scenarios and time constraints on e-scooter riders’ cognition, riding performance, and well-being. Our methodology integrated a measurement model for linking observed variables to latent constructs and a structural model for describing their interrelationships. Model was assessed using specific indices: χ2/df, CFI, TLI, and RMSEA. These indices helped us to ensure that our model accurately represented the underlying data structure (Zhang & Roberts, 2023).
Findings
The research seeks to understand what the precursor of well-being in transportation and how prosocial behavior would be influenced driver’s well-being under interdependent road situations. Our preliminary structural equation modeling (SEM) analysis revealed several insights into the relationships between sociality, cognition, riding performance, and well-being among participants (Figure 2).
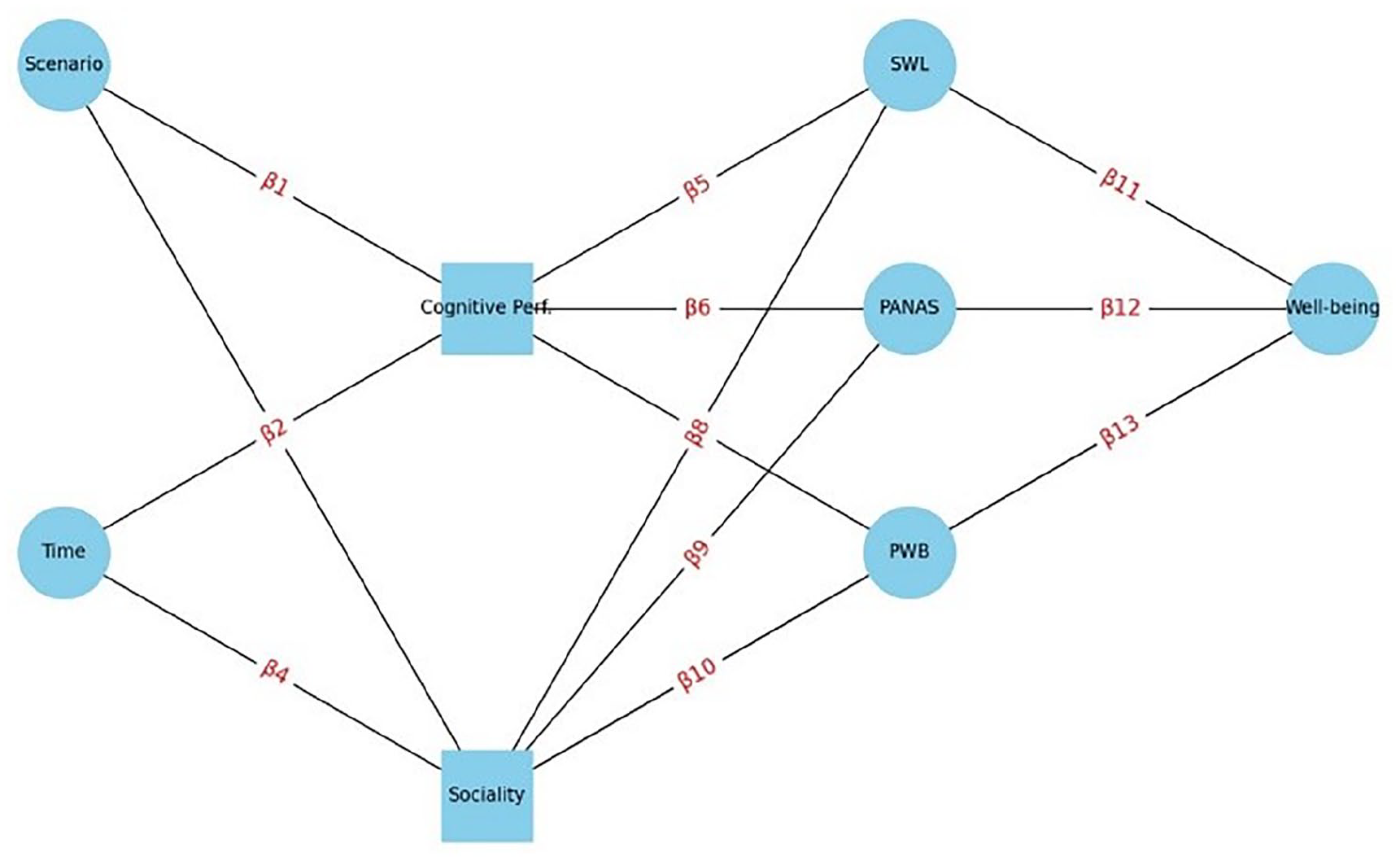
The preliminary structural equation model.
The model fit indices for the structural equation modeling (SEM) analysis indicated that the model did not meet the recommended thresholds for a good fit. The chi-square to degrees of freedom ratio (χ²/df) was 159.02, which exceeded the acceptable range of ≤2 or 3, suggesting poor model fit. The Comparative Fit Index (CFI) and the Tucker-Lewis Index (TLI) were both below the recommended value of ≥0.90, with values of 0.68 and 0.53, respectively. Similarly, the Robust CFI and Robust TLI also fell short of the threshold, both being 0.68 and 0.53, respectively. Consequently, based on these indices, the model could not be considered a good fit.
Using R’s lme4 package for linear mixed effects models, our study explored the impact of prosocial versus asocial behaviors and time environments on e-scooter riders’ cognitive performance and well-being (Kuznetsova et al., 2015). Models uncovered new insights into how prosocial behaviors affected riding performance. The models showed a significant decrease in minimum TTC with prosocial behavior (β = −1.03, SE = 0.29, t = -3.53, p < .001). Post hoc Tukey’s HSD analysis confirmed this reduction compared to asocial behaviors (difference = −1.03, 95% CI [−1.60, −0.46], p < .05), suggesting increased rider confidence to speed up without reducing distance from pedestrians. Time constraints also affected minimum TTC, with increases observed in time-neutral (β = .74, SE = 0.24, t = 3.11, p = .002) and time-pressed (β = 1.24, SE = 0.24, t = 5.25, p < .001) conditions. Being time-pressed led to significantly higher minimum TTC compared to time-relaxed (difference = 1.24 s, 95% CI [0.78, 1.71], p < .001), indicating safer riding behaviors like lower speeds and greater distances. There was a significant interaction between social behaviors and event types, with increased speed at decision points for riders receiving prosocial behaviors during merging events (β = .47, SE = 0.21, t = 2.27, p = .024). This aligned with the decrease in minimum TTC for prosocial behaviors. Tukey’s HSD post hoc tests confirmed the increase in speed during merging events compared to the baseline for asocial behaviors during crossing events (difference = 0.47, 95% CI [0.06, 0.88], p < .05).
Takeaways
This study presents a novel approach to measuring drivers’ well-being in social interactions, replicating real-life navigation challenges and social dynamics in shared spaces (Hauser et al., 2018; Markkula et al., 2020). It operationalizes the social interaction between micromobility riders and pedestrians within an online simulated experiment, offering Human Factors engineers challenging methodologies for measuring well-being in transportation—a field with limited research.
The research aimed to identify the precursors of well-being in transportation and how prosocial behavior influences driver well-being in interdependent road situations. Preliminary structural equation modeling (SEM) analysis revealed insights into the relationships between sociality, cognition, riding performance, and affect well-being among participants. However, the SEM model did not meet the recommended thresholds for a good fit, including a chi-square to degrees of freedom ratio (χ²/df) of 159.02 and Comparative Fit Index (CFI) and Tucker-Lewis Index (TLI) values below 0.90. We will incorporate individual differences to enhance model specifications and adjust latent variables, such as satisfaction, based on modification indices to identify the precursors of well-being in transportation and achieve a better-fitting model.
Further analysis with linear mixed effects models explored the effect of prosocial versus asocial behaviors on e-scooter riders’ riding performance. The models indicated that prosocial behavior significantly decreased minimum time to collision (TTC) (β = −1.03, SE = 0.29, t = −3.53, p < .001), suggesting increased rider confidence to speed up. Time constraints also influenced riding behavior, with higher minimum TTC observed in time-neutral and time-pressed conditions, indicating safer riding behaviors. Interaction effects showed increased speed at decision points for riders receiving prosocial behaviors during merging events. These findings suggest that prosocial behaviors and time pressure affect rider performance, highlighting the importance of social dynamics in transportation contexts.
Footnotes
Acknowledgements
We also thank members of the University of Wisconsin-Madison Cognitive Systems Laboratory for their insightful discussion and comments.
Declaration of Conflicting Interests
The author(s) declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: The research was funded by Honda Research Institute USA, Inc. Teruhisa Misu, Kuman Akash, and Shashank Mehrotra are employed by Honda Research Institute USA, Inc. These authors worked with the university authors and aided with the study design, data collection, analysis, interpretation of data. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Honda Research Institute USA, Inc. Grant No. POHRI-004483.