
Abstract
The excess thermal energy produced by nuclear power plants (NPPs) during low electricity demands can be utilized in industrial processes, such as hydrogen production, through a thermal power dispatch (TPD) system. Initial testing of the first iteration of a single-train TPD design with a manual control mode at the Idaho National Lab (INL) revealed a high operator workload and degraded control capability. The current study evaluated the impact of an enhanced dual-train TPD design on operators’ subjective mental workload and evolution task-time while completing two operating scenarios in manual and automatic control modes. The results showed no statistically significant difference between participants’ mental workload using both control modes. Evolution time in automatic control mode took a shorter time than in manual control, with participants completing all evolutions in less than the 10-min set as the design specification limit. The shorter evolution time is discussed within the context of plant safety and operational efficiency.
Keywords
Introduction
The proliferation of renewal energy is resulting in variable daily periods of overgeneration. Currently, operating nuclear power plants (NPPs) are not designed to load-follow or reduce load during the day. A potential solution is to use excess thermal and electrical energy produced during low electricity demands as an alternative revenue source. The excess thermal power of NPPs may be utilized in industrial processes, such as hydrogen production through high-temperature steam electrolysis (HTSE). A thermal power dispatch system serves as a physical system to channel the excess thermal energy, in the form of steam, from the nuclear plant to the HTSE safely and efficiently. Ongoing research efforts at the Idaho National Laboratory (INL) initially developed several TPD system models that can be operated within GSE Solutions’ Generic Pressurized Water Reactor (GPWR) simulator, a full-scope simulator that simulates the thermohydraulic systems of the NPP and facilitate scenario-based evaluations with human-operators-in-the-loop (HOIL; Ulrich et al., 2021). The initial TPD model utilized a single-train design with manual controls.
An initial HOIL study at INL, using the first single-train TPD design, revealed the TPD operation imposed a significant workload on operators due to tedious manual valve manipulations and system monitoring, lack of automated control capability of operators, and inattention to the TPD system during plant upset with operators prioritizing primary plant operations (Ulrich et al., 2021). The primary plant priority aligns with expected best practices, however neglect of the TPD with the volume of steam flow is undesirable due to potential impacts on the primary plant and therefore some attention on this system is required. This initial model was using a manual valve control scheme based on guidance from operational industry experts. Operational philosophy maintains that even if automatic control were implemented, operators must be capable of using the system in a manual control scheme as a failsafe to automation failures and should be demonstrated with this new capability. Though the study demonstrated operators could control the system without significant safety concerns, the empirical data strongly demonstrated the need for an automatic control scheme to eliminate the observed high workload required by the manual control scheme. Enhancing the TPD design to include an automatic control scheme is a cost effective and operationally efficient alternative to increasing the number of operating crew in the control room in an environment where personnel cost is already a major cost driver. Together, these findings underscore the need for enhancing the TPD design to improve operational control and minimize cost using an automated controls.
A concerted effort by INL researchers recently culminated in the development of a dual-train TPD design using automated controls. The dual-train design contains two identical trains (A and B). The dual-train design was guided by the cheaper and more off the shelf components of reasonably sized smaller trains, and the flexibility of being able to operate the trains independently. The previous TPD system design extracted steam from the main steam line. The steam was of substantially higher quality and higher temperature than required for HTSE. The revised design extracts steam from after the high-pressure turbine which reduces the temperature and quality but is still suitable for HTSE. This also reduces impacts on the plants secondary steam system and results in an overall reduction in plant impacts. Additionally, the dual-train TPD design has automatic control capabilities called auto-ramp, for transitioning from hot standby to online and online to hot standby.
The usability of the dual-train TPD design using student participants is the focus at this early stage of development. Using students as operator surrogates is a cheaper and proactive approach to identifying the same usability issues as expert operators (Ulrich et al., 2017). Indeed, even well-trained students’ performance will differ from that of expert operators as students may not understand the underlying operational significance of most of their actions. However, students have been shown to be equally suitable candidates for usability evaluations after sufficient training (Ulrich et al., 2017). Early identification of usability issues enables focus on the operational and expert use of the system in a full-scope simulator during subsequent phases of the development lifecycle. A previous study identified human-system interface (HSI) and procedure-related usability issues common to both students and expert users of the dual-train TPD simulator (Gideon et al., 2024). The current study was aimed at evaluating the impact of the dual-train TPD design on the operator’s subjective mental workload and task completion time to transition between operating modes using student participants. The hypothesis was dual-train TPD design with auto-ramp control modes would reduce subjective workload and task completion time. The participants completed two operating scenarios is manual and auto-ramp control modes using the adapted TPD HSI and operating procedures.
Thermal Power Dispatch Simulator Human-System Interface
The actual TPD HSI with all its specifications is described in detail in a separate paper (Ulrich et al., 2023) and the reader is referred to this paper for more details. For the sake of the current study, the TPD HSI was adapted to fit into 32-inch 4K UHD monitor (Figure 1) and connected to the GPWR simulator via an application programming interface for dynamic element presentation (Gideon et al., 2024).
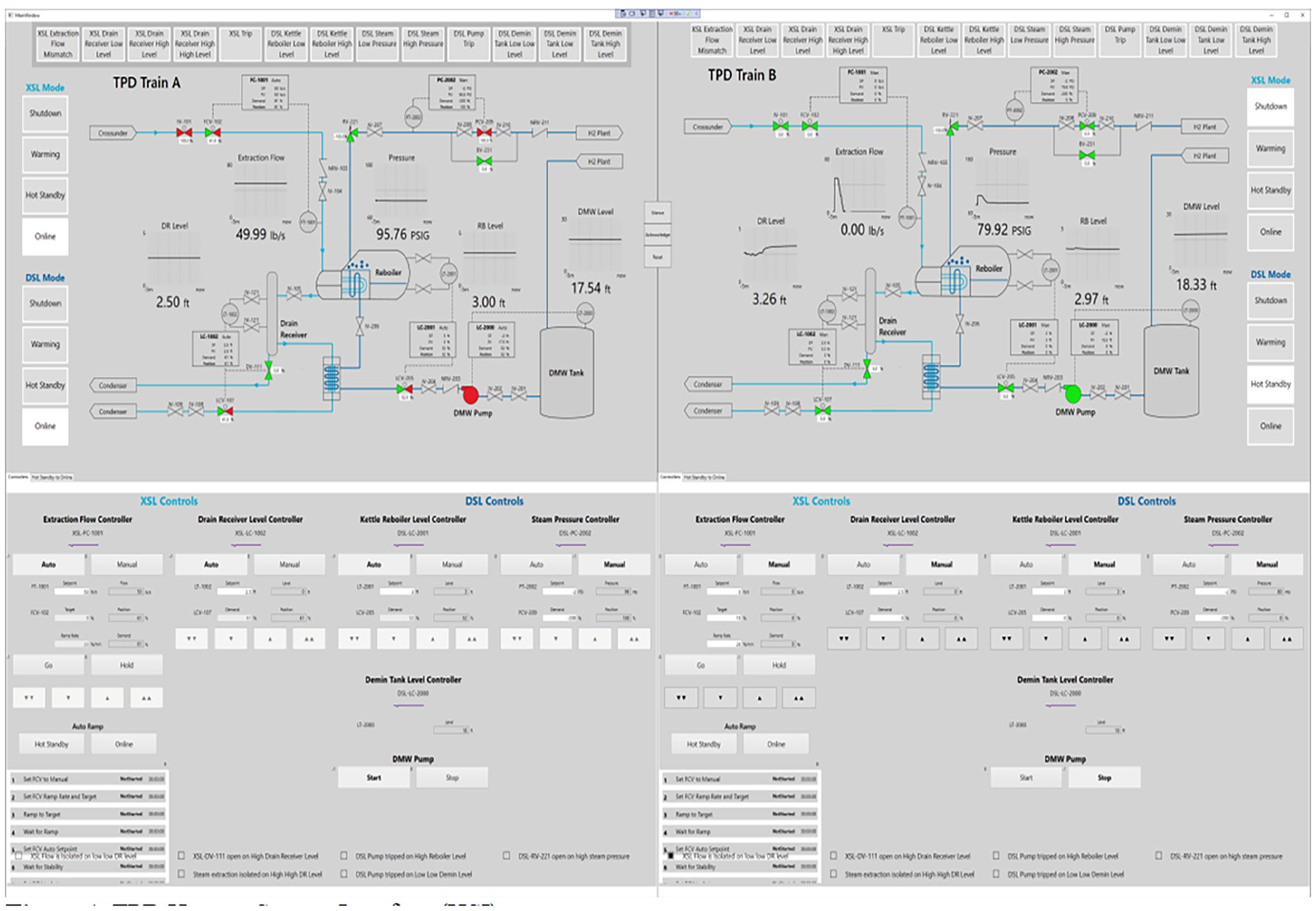
TPD Human-System Interface (HSI).
Operating Scenarios and Control Modes
The TPD operates under two scenarios and two control modes. The TPD would only be Shut down for brief periods of time during outages. From a cold Shutdown it would go through a warmup mode every 18 months. During most of its operation it would be in Hot Standby and Online mode. Therefore, the two TPD scenarios in this study are Hot Standby to Online and Online to Hot Standby. In simple terms, Hot Standby to Online involves changing the TPD state from Hot Standby by raising steam extraction rate (2.5 lb/s) to Online rate (50 lb/s), whereas Online to Hot Standby is the opposite.
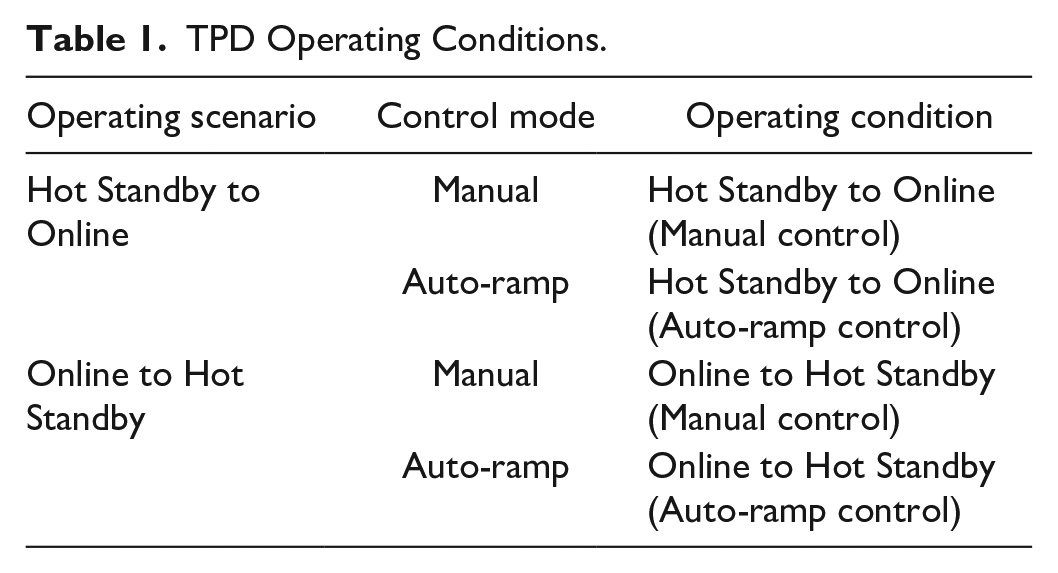
The scenarios can be operated either manually (manual control mode) or automatically (“auto-ramp” control mode). Manual control involves, the execution of a sequence of control actions by the operator juxtaposing system’s behavior against setpoint values specified in the corresponding procedure adapted to student users. In auto-ramp control, the system performs autonomous execution of scenario steps, with the operator verifying the process as required by the U.S. NRC’s rules on control automation (O’Hara & Higgins, 2020). Four distinct operating conditions (which served as experimental conditions) resulted from combining operating scenarios and control modes (Table 1).
TPD Operating Conditions.
Methods
The study was a 2 × 2 within-subjects design with operating scenario and control modes as the independent variables and mental workload and evolution time as dependent variables.
The task consisted of four trials: two operating scenarios (Hot Standby to Online, Online to Hot Standby) executed in two control modes (manual, auto-ramp) using trains A and B. Participants completed the tasks in two sessions of no more than 1 hr each. The maximum duration between sessions was capped at 7 days to minimize the possibility of participants forgetting knowledge gained from training in the first session on how to operate the system. Participants completed one operating scenario (in manual and auto-ramp) per session with the order of operating scenario, control modes, and trains counterbalanced to prevent order effect. Participants watched a recorded video showing an operator walkthrough one of the TPD scenarios to acquaint them with how to use the adapted procedure to execute the task.
Participants
Participants were recruited from the student population of a university in the northwest of the U.S., and received nominal compensation for participating. The study protocol was approved by the Institutional Review Board.
Measures
The National Aeronautics and Space Administration Task Load Index (NASA-TLX) and transition time of operating scenarios were used to measure subjective mental workload and task completion time, respectively.
The NASA-TLX is a multidimensional measure of subjective workload widely used to assess the mental workload imposed while performing a task. Mental workload is measured using a questionnaire containing six subjective factors: mental demand (MD), physical demand (PD), temporal demand (TD), performance (OP), effort (EF), and frustration (FR). In the current study, the NASA-TLX was administered in a four-stage process: determination of factor weight, factor rating, total weight, and workload score. First, to determine factor weight, participants rated the contribution of each of the six subjective factors in a perceived order of the contribution of each to the workload for the task ranging from 0 (not relevant) to 5 (most relevant), resulting in a sum of 15 for each participant. Second, factor rating was obtained by having participants rate each of the subjective factors based on the subjective level of mental workload experienced performing the task on a scale of (10 = very low and 100 = very high). Next, the total weight of a participant’s workload was determined by summing the product of factor weight of each factor by its corresponding factor rating. Lastly, the workload score was computed by dividing the total weight by 15.
The task is an evolution in which the operator manipulates valves to move the system from Hot Standby to Online and back again. Task completion time was measured as the total time to transition between Hot Standby and Online and was obtained from the simulator log. Based on technical and operational recommendations, a maximum time limit of 10 min was set for the transition between Hot Standby and Online modes. The TPD HSI design included additional human factors considerations to streamline the process to ensure the 10-min specification time limit was feasible for the transition.
Procedure
The procedure proceeded in five steps. First, participants completed informed consent at the beginning of the first session. Second, participants watched the video demonstration showing a walkthrough of one TPD scenarios in manual control. Third, participants were randomly assigned to operating scenarios forcing equal sample sizes. Fourth, participants completed task trials in the assigned scenario’s manual and auto-ramp control modes and completed separate NASA-TLX questionnaire at the end of each trial. Lastly, participants returned for the second session on a mutually agreed date and completed the set of trials in the second operating scenario and their corresponding NASA-TLX ratings.
Results
The results for subjective mental workload and task completion time were analyzed separately. Subjective mental workload scores were analyzed using a Scenario (Hot Standby to Online, Online to Hot Standby) × Operating Mode (Manuel, Auto-Ramp) repeated measures ANOVA. The result showed no statistically significant main effects for Scenario F(1,22) = 0.16, p = .69, ηP2 = .007, and Operating Mode, F(1,22) = 2.0, p = .17, ηP2 = .08. There was no statistically significant Scenario × Operating Mode interaction, F(1,22) = 0.38, p = .55, ηP2 = .02.
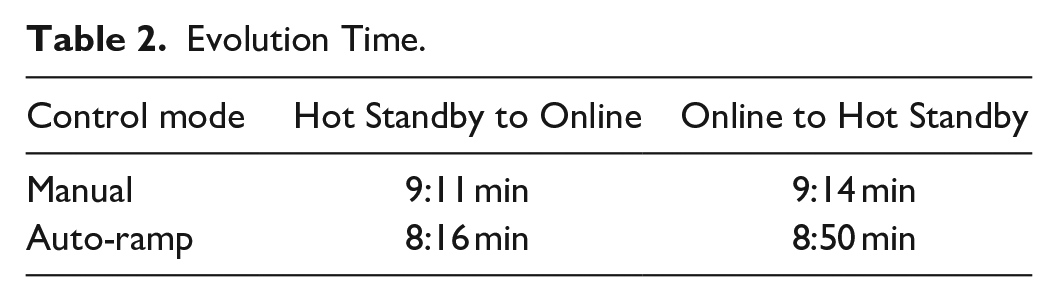
Marginal mean averages were used to analyse evolution time data obtained from the simulator log. The average evolution time to complete the Hot Standby to Online scenario in manual and auto-ramp control were 09:11 min and 8:16 min, respectively. The average evolution time to complete the Online to Hot Standby scenario in manual and auto-ramp control were 9:14 min and 8:50 min, respectively (Table 2; Figure 2)
Evolution Time.
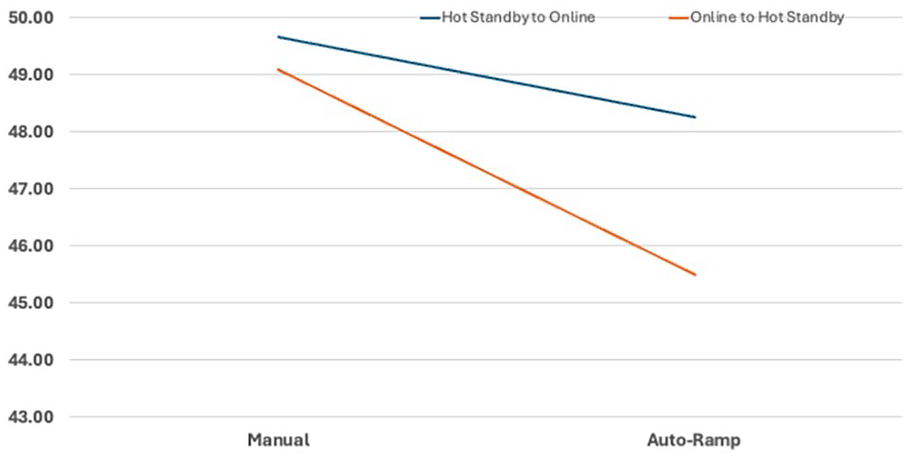
Scenario × Operating mode.
Discussion
This study evaluated the impact of the two different control modes of the dual-train TPD design on operator’s subjective mental workload and evolution time. We hypothesized operating the TPD in manual control mode would increase subjective mental workload and evolution time. Results showed no significant difference between participants subjective mental workload across TPD operational scenarios. However, evolution time was higher in the manual control modes of both operating scenarios, but lower than the 10 min set as desired specification limit in the manual and auto-ramp control modes. The longer evolution time in manual control mode may be related to the series of steps participants had to manually execute compared to verifying the automatic execution of steps in auto-ramp. The shorter evolution time in auto-ramp presents a great opportunity for maximizing plant safety and operational efficiency by minimizing tedious manual valve manipulations and system monitoring with the potential to degrade operator control capability.
Conclusion
The thermal power dispatch system presents an immense opportunity for the flexible operations of NPPs to generate alternative non-electric revenue streams. As in the current study, using novices to test TPD design iterations provides a proactive and cost-effective approach to gaining valuable insights into the impacts of the dual-train TPD design on operator performance to ensure effective operational control and promote plant safety from the early stage of development.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work of authorship was prepared as an account of work sponsored by Idaho National Laboratory, an agency of the U.S. Government. Neither the U.S. Government, nor any agency thereof, nor any of their employees makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights.