
Abstract
We developed a predictive model to estimate dynamic external hand forces during overhead tasks while wearing arm-support exoskeletons (ASEs). Despite the reported potential of ASEs to reduce muscle activation during overhead work, challenges in EMG sensor placement hinder comprehensive muscle monitoring. ASE effectiveness can be assessed by estimating shoulder forces through inverse dynamics, which requires external forces and body kinematics. Direct measurement of external forces can be quite challenging in practice. However, a predictive model could support estimating these forces without load cells. Participants completed task simulations using ASEs, while muscle activity and external forces were measured. Employing a random forest algorithm, EMG signals were mapped to force time series, accounting for participant characteristics and task parameters. Mean load cell values were 7.6 (SD 30.5) N, while predicted values were 7.6 (SD 22.7) N, affirming the potential of using EMG signals to estimate external hand forces while using ASEs.
Introduction
Arm-support exoskeletons (ASEs) are assistive devices that can aid the user during various physical activities and have received attention as an alternative intervention to reduce shoulder work-related musculoskeletal disorder (WMSD) risks during overhead work. Despite the reported potential of ASEs to reduce muscle activity during overhead work (Alabdulkarim et al., 2019; Butler et al., 2022; Engelhoven et al., 2019; Gillette & Stephenson, 2019; Kim et al., 2018; Maurice et al., 2020; Moeller et al., 2022; Schmalz et al., 2019), challenges in surface electromyography (EMG) sensor placement hinder a comprehensive understanding of such effects across the many shoulder muscles involved. More generally, evaluating the effectiveness of different ASE designs requires estimating inter-segmental forces and moments at the shoulder (glenohumeral) joint. These estimations are usually derived through inverse dynamics, which depend on precise measurements of segmental kinematics and external forces applied to the hand (Van den Bogert, 1994). Direct measurement of external hand forces, though, can be challenging in practice, thus making a predictive model a valuable tool for estimating these forces (e.g., without load cells).
The aim of this study was to develop a model to estimate external hand forces during simulated overhead work, using surface EMG data. Specifically, we explored the performance of a machine learning model in predicting external hand forces. Several studies have already explored the use of features extracted from EMG signals using different machine learning models for force prediction (Ma et al., 2020; Meng et al., 2014; Zhang et al., 2020). Completing this work could enable hand force estimation without direct measurement of external hand forces when using ASEs. Results of this work could also contribute to the optimization of ASE design and shoulder joint health more generally.
Methods
A convenience sample of 18 participants (9 M, 9 F) performed lab simulations of overhead nut-running tasks under four intervention conditions (i.e., using each of three different ASEs and without any ASE). The tasks required using an unpowered pneumatic tool at three height levels (low, medium, high) to apply forces upward and forward on work targets; complete details for the conditions are provided in (Ojelade et al., 2023). Each condition was replicated 10 times. Muscle activity was measured at 1.5 kHz from seven shoulder muscle groups on the dominant arm and bilaterally on a neck flexor and a low back extensor group, using a wireless surface EMG system (Noraxon, AZ, USA). EMG signals were normalized to values obtained during maximum voluntary isometric contractions. Forces exerted on the work target were measured at 200 Hz, using a triaxial load cell.
We used a random forest algorithm to map EMG signals to corresponding measured force time series. Inputs to this mapping were normalized EMG data along with individual height and body mass (Min-Max scaled), task height, force direction, and intervention level. Data were divided into training, validation, and testing sets. For each condition, one replication was randomly allocated to validation, another to testing, and the remaining eight to training. Hyperparameter tuning was performed using a grid search on the validation dataset, selecting hyperparameters with minimum root mean square error (RMSE). Model performance was assessed on the test dataset based on RMSE. Moreover, normalized RMSE (NRMSE) values were computed based on normalized values of actual and predicted hand forces, using Min-Max scaled method, as outcome measures to compare predicted against actual values.
Results
Across all conditions, the RMSE and NRMSE were 20.07 N and 0.18, respectively. The actual load cell values had a mean (SD) of 7.6 (30.5) N, whereas the predicted values were 7.6 (22.7) N. For upward force exertions, mean RMSE and NRMSE were 22.5 N and 0.180, respectively. For forward force exertions, the respective values were 16.9 N and 0.177. The largest mean RMSE and NRMSE values were 27.2 N and 0.183, respectively, which occurred when participants exerted upward forces at the high height level.
Discussion
Our results show the potential of using EMG signals to estimate external hand forces during overhead tasks (Figure 1). The results highlight differences between the peak values of the model and actual load cell values. This variation may arise from the distribution of our dataset. The majority of data points are associated with zero values when participants did not apply force to the load cell. This imbalanced distribution could hinder our model’s accuracy in predicting cases associated with peak values. In future studies, employing different preprocessing methods, such as random under-sampling (Torgo et al., 2013; Torgo et al., 2015), SMOTER (Torgo et al., 2013), and SMOGN (Branco et al., 2017), could aid in addressing imbalanced regression tasks.
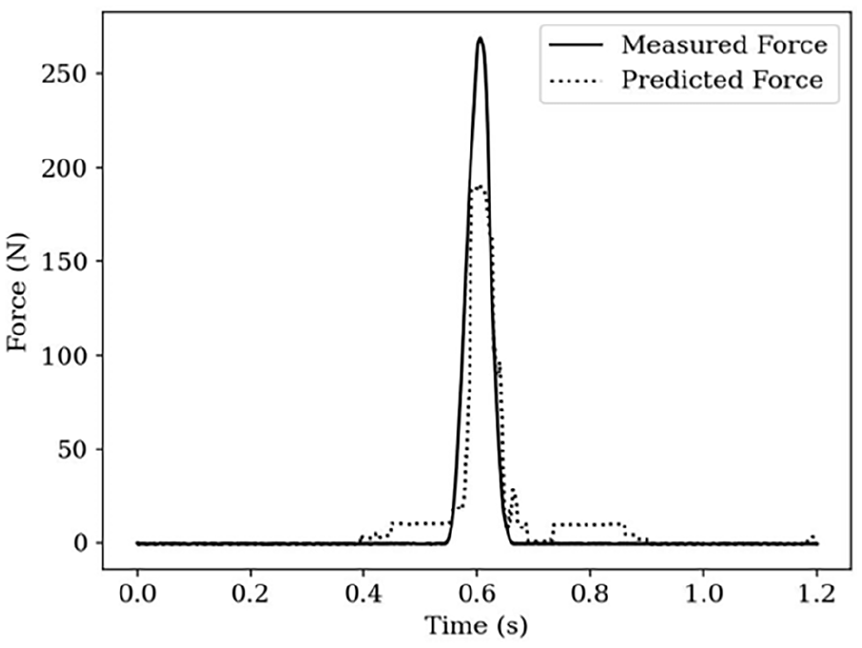
Example of predicted and actual loadcell data with an arm-support exoskeleton, when force was applied upward to the work target at the high height.
Another factor that could contribute to higher RMSE values is the model’s early prediction of force compared to when participants apply force on the load cell. This error was likely due to muscle activation starting before force application to the load cell, leading the model to predict force before contact. This discrepancy inflates RMSE, causing inaccuracies during the initial contact phase. Furthermore, overhead tasks involving upward force exertion recruit a more complex set of shoulder muscles and joint structures compared to forward exertions (Chopp et al., 2010). Such complexity could lead to greater variability in muscle recruitment patterns and EMG signals, increasing the prediction error when force is applied upward. In future studies, integrating kinematic data into predictive models could enhance accuracy. Exploring a range of models to predict forces could also identify the most effective approach.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.