
Abstract
This research investigates how brain activation in the prefrontal cortex (PFC) changes with learning stages in a psychomotor task. Utilizing functional near-infrared spectroscopy (fNIRS), we measure prefrontal cortex activation in participants engaged in the simulated landing of a quadrotor, a complex system whose dynamics are non-intuitive for novices. Our findings indicate a significant decrease in PFC activation as learners progress from novice to proficient stages, suggesting a reduction in cognitive load that is correlated with performance improvements in the landing task. These insights could inform the design of future systems that optimize learning interventions based on cognitive state assessments.
Keywords
Introduction
Psychomotor tasks are often important when humans interact with partially autonomous dynamical systems, such as navigating uninhabited air or ground vehicles via joystick input, or steering partially autonomous cars via steering wheel input. However, learning to accomplish the task with sufficient proficiency can be time consuming, particularly if the task involves non-intuitive system dynamics, a high degree of precision, complex sequences, or satisfaction of multiple constraints, as is the case in many complex autonomous systems. In such circumstances, human learning can be facilitated by automated assessments of learning stages in the psychomotor task. We seek to develop tools that can help characterize progression amongst learning stages in a psychomotor task, by using both performance-based metrics as well as measures of brain activity during the task.
One way to measure brain activity is through functional Near-Infrared Spectroscopy (fNIRS), a neuroimaging tool in which noninvasive optical imaging is used to observe brain activation via the flow of blood (Boas et al., 2014; Ferrari & Quaresima, 2012). Changes in oxygenated hemoglobin (HbO) indicate consumed oxygen being replenished in the brain via the blood oxygen level dependent response (León-Carrion et al., 2008). Current fNIRS sensing technology has advanced to accommodate wearable and wireless platforms (Hu & Shealy, 2019) with fairly robust spatial resolution, which enables its use for assessing brain activity in psychomotor tasks.
We focus on brain activation in the prefrontal cortex (PFC), an area associated with decision making and evaluation of rewards (Krawczyk, 2002), which is particularly relevant for learning in complex, dynamic environments. Cognitive and motor tasks that involve attentional control typically are associated with a decrease in activation in the PFC as a task is practiced (Kelly & Garavan, 2005). There is evidence of a decrease in activation of the dorsolateral PFC during short-term learning (Floyer-Lea & Matthews, 2005), and reduced activation in the lateral and ventromedial PFC during extended learning (Amemori & Sawaguchi, 2006; de Wit et al., 2009). As skills become automatic, other regions of the brain (such as the motor cortex) increase in activation, while a decrease occurs in the PFC (Ashby et al., 2010; Floyer-Lea & Matthews, 2005; Immink et al., 2020).
Here, we measure changes in activation in the PFC as participants progress through short-term learning stages during a complex psychomotor task that involves landing a quadrotor in a simulated environment (Figure 1). This task, originally introduced in (Byeon et al., 2021), requires handling the complex, non-intuitive dynamics of the quadrotor as well as navigating the precise nature of the landing constraints.
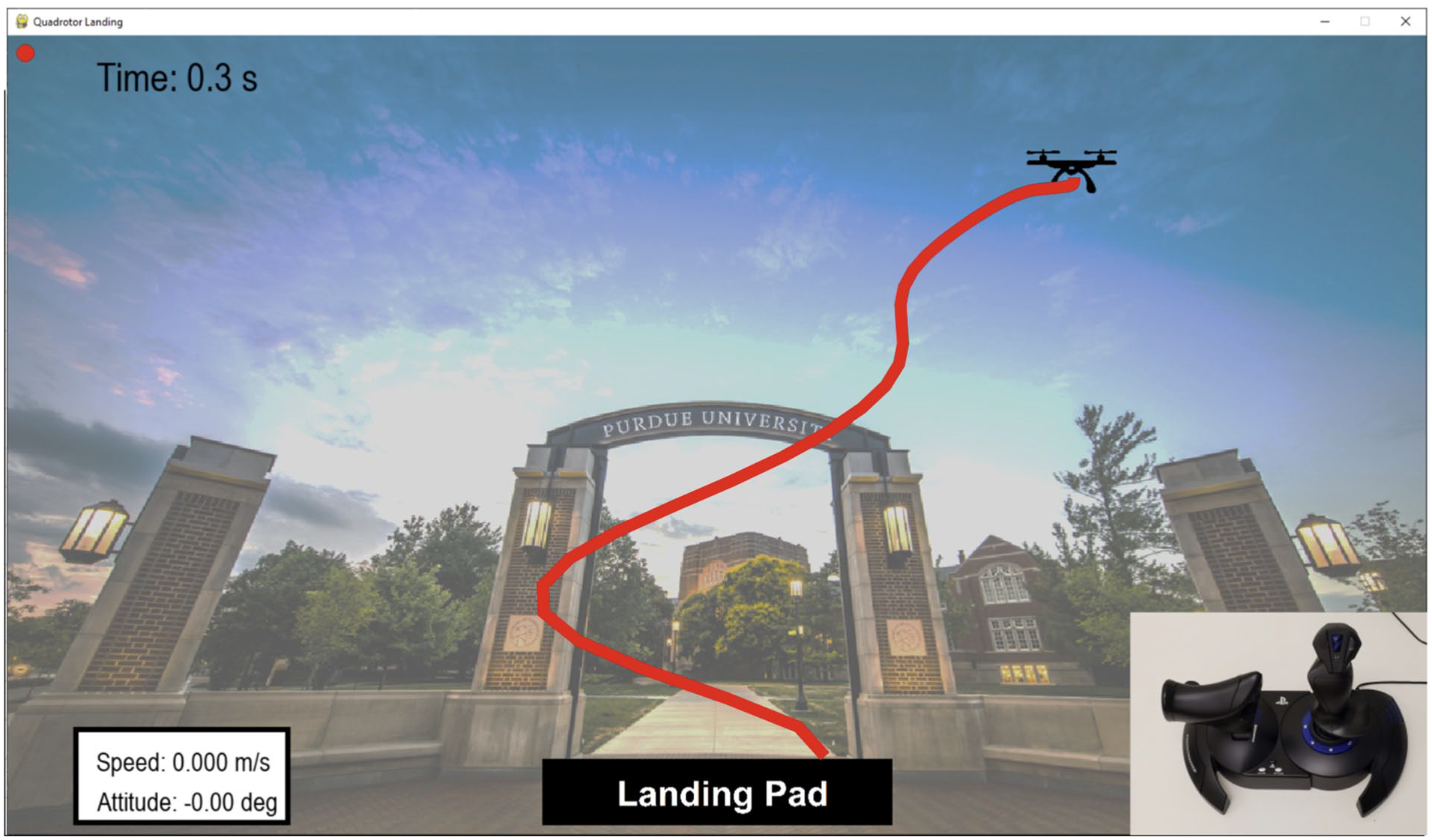
Experimental setup for the quadrotor landing task. Participants are instructed to land the quadrotor safely, on the landing pad, from the position at the top right of the screen. They use a Thrustmaster T.Flight Hotas controller (bottom right) to pilot the quadrotor.
We seek to evaluate the relationship between learning stages and brain activation measured by fNIRS in the PFC. We hypothesize that (a) short-term learning is negatively correlated with learning stage, and (b) earlier stages of learning, characterized by demands on attention, are associated with increased cognitive activation. Our main contribution is the empirical evaluation of fNIRS as a function of learning stage in a difficult psychomotor task.
In the following, we first describe the experimental setup, then overview the methods that we use to process the fNIRS data. We provide a brief summary of the classifier, developed previously (Yuh et al., 2024), that provides an automated assessment of learning stage for each trajectory. We then evaluate changes in fNIRS measurements as a function of learning stage, and discuss our results. Lastly, we provide conclusions and directions for future work.
Experimental Setup
We conducted an IRB-approved human-subject experiment in a two-dimensional quadrotor simulator at a Midwest University, in which participants attempted to land a quadrotor from a fixed starting point in each of 25 trials (Figure 1), with at most 2 min per trial to avoid time pressure. The participants completed two 1 min tutorials before the experiment to familiarize themselves with the use of a Thrustmaster T.Flight Hotas gaming joystick. Participants wore the Obelab NIRSIT headset (Figure 2) for the entire experiment.

The Obelab NIRSIT fNIRS device is a headset worn on the forehead that covers the prefrontal cortex. It is a continuous wave (CW) fNIRS device with 24 sources and 32 detectors.
Although 31 participants completed the study, eight participants were excluded due to incomplete or corrupted fNIRS data (e.g., hair impeding sensor contact), or non-compliant behavior during the experiment (e.g., flying the quadrotor in an exploratory manner, after mastering the landing task, in a manner that was inconsistent with the experimental protocol). Simulator data consisted of quadrotor trajectories for each trial; the position and velocity of the quadrotor were sampled at a rate of 30 Hz. After each trial, subjects were asked to assess their self-confidence (e.g., perceived ability to land the drone safely) and workload (how mentally demanding the task was). Lastly, fNIRS data in the form of light intensity was gathered at 8.3 Hz.
Methods and Analysis
A series of processing steps are required to achieve changes in HbO after collecting the raw fNIRS signal. First, light intensity is converted to optical density (Scholkmann et al., 2014). The signal is then corrected for motion artifacts via the temporal derivative distribution repair method (Fishburn et al., 2019) before a 500th order bandpass filter is applied to remove noise. Next, optical density is converted to HbO. Lastly, Mayer wave noise (Sato et al., 2016; Yücel et al., 2016) is filtered with a short channel linear regression via iteratively reweighted least squares (Santosa et al., 2018).
The processed fNIRS data results in HbO values for the 48 fNIRS channels across the prefrontal cortex in all 25 trials for each participant. For each participant, a z-score normalization is applied across the 48 fNIRS channels. We then calculate, for each trial, the time-averaged HbO value for each of the 48 fNIRS channels. We average over the 48 channel HbO values to obtain an average HbO value that reflects the overall prefrontal cortex activity for the trial.
To assess learning stages, we employ a version of the rule-based classifier developed in (Yuh et al., 2024; Figure 3) that analyzes trajectories in quadrotor position, velocity, and attitude, and associates them with four learning stages (Dreyfus, 2004) tailored to the quadrotor landing task. The classifier is based in kernel embeddings of distributions which is a non-parametric machine learning technique. This technique is amenable to the heterogeneity of human-in-the-loop dynamics and the variability exhibited as participants learn to fly the quadrotor effectively. The classifier employs a heuristic that first identifies a subset of learning stages that are feasible based on landing outcomes, then selects the learning stage whose canonical distribution has the smallest distance to the trajectory of interest.
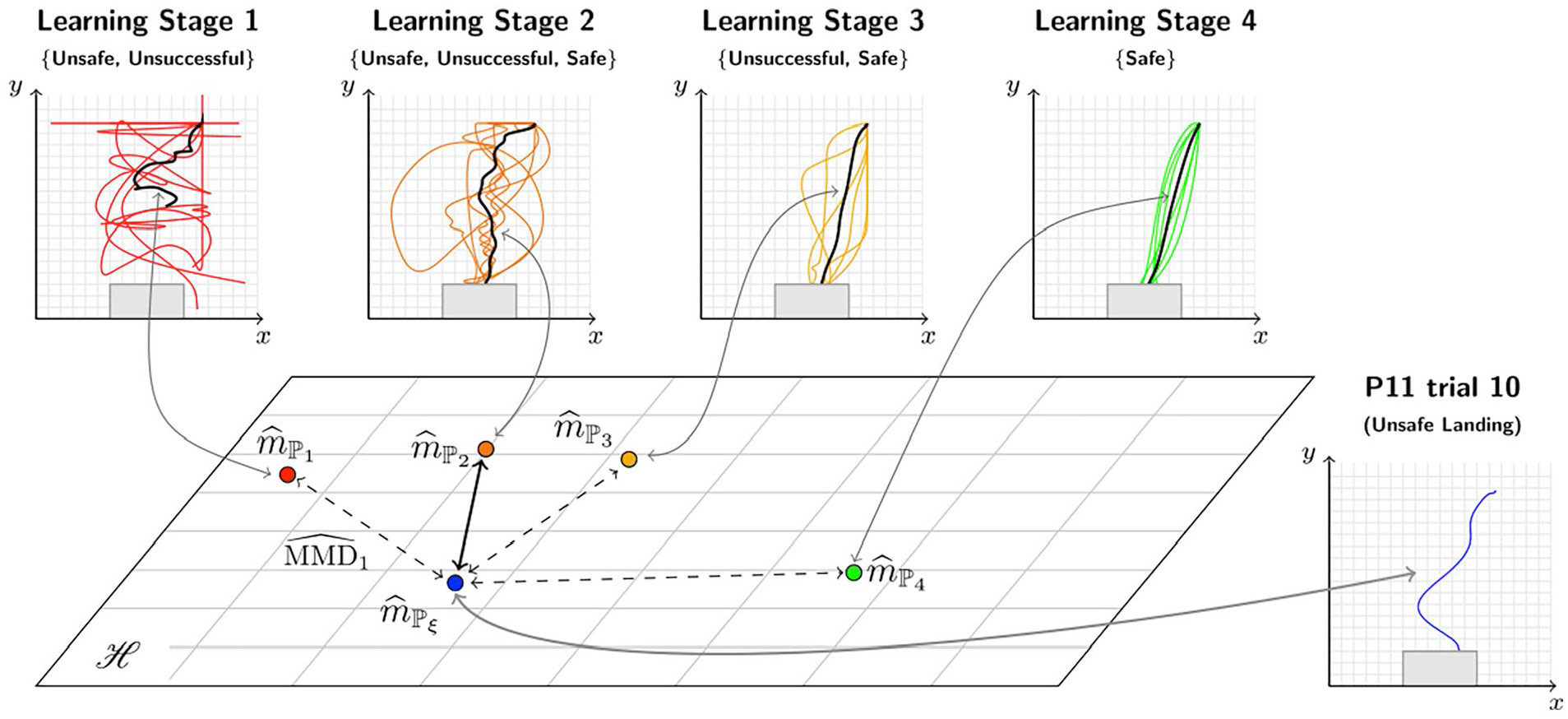
To classify a trial with one of four learning stages, we compare the distance from the trajectory observed during the trial to a canonical distribution associated with each feasible learning stage (Yuh et al., 2024) and choose the learning stage associated with the canonical distribution that has the smallest distance. The feasibility conditions for each learning stage are indicated in brackets. Here, the trajectory from P11 trial 10 (blue) is classified as learning stage 2, since of the learning stages that allow for unsafe landings, the canonical distribution associated with learning stage 2 has the smallest distance to the observed trajectory. This figure is modified from the original in Yuh et al. (2024) (Figure 5), with alterations to the labelling, and used here with permission via a Creative Commons License.
Results
The classified learning stage, average HbO value, and 48 channel HbO values are shown for all subjects and all trials in Figure 4. No participant reached learning stage 4, likely due to the relatively small number of trials to achieve proficiency and the fact that novice drone pilots were recruited for the experiment.
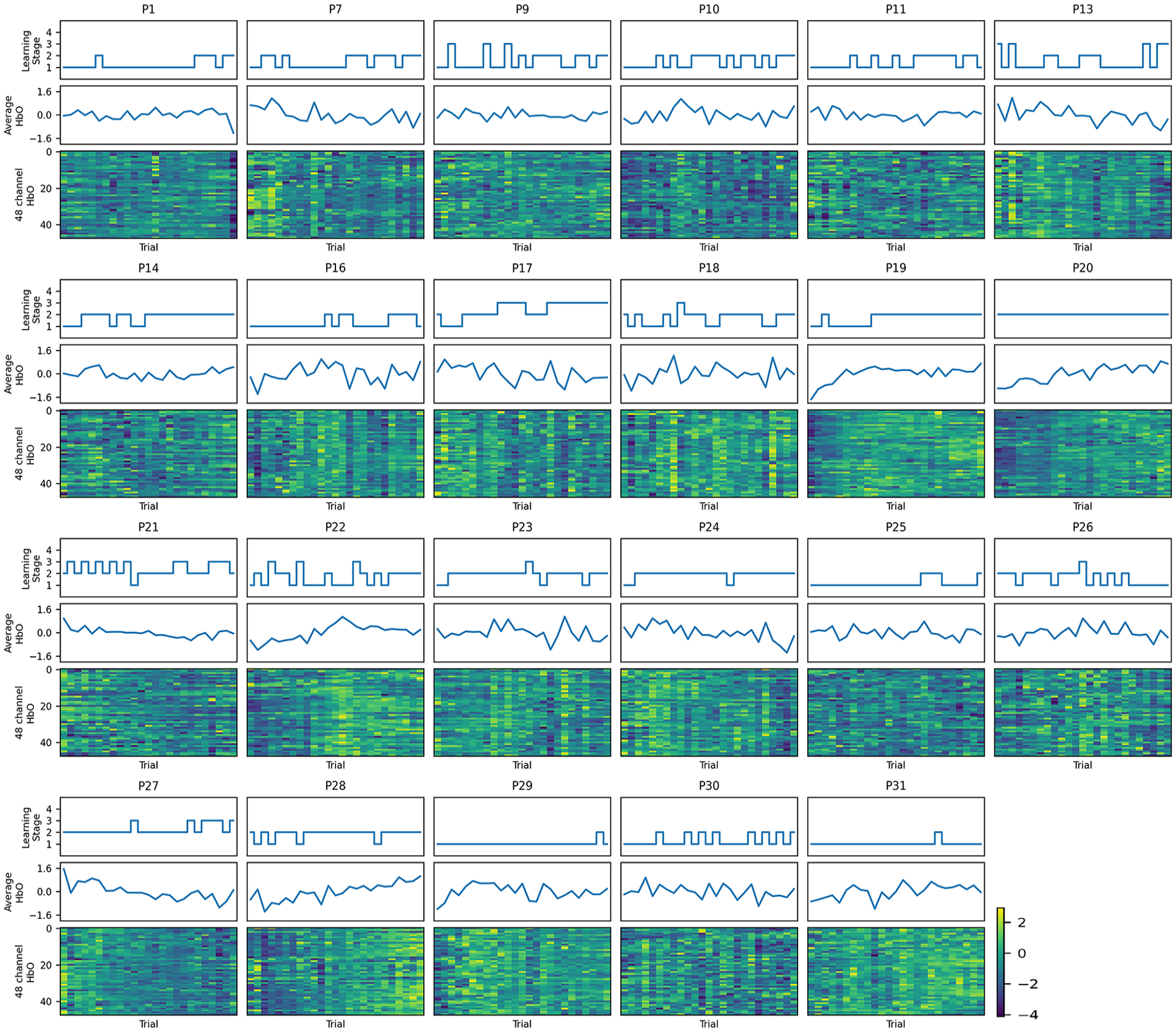
Learning stage classification, average HbO values, and 48 channel HbO values for all participants across all trials.
A one-way ANOVA on average HbO and learning stage showed statistically significant differences in average HbO across learning stages (F[2, 45] = 17.04, p < .001). Further comparison via independent t-tests (Table 1), indicates significant differences in average HbO between learning stages. We find lower levels of average HbO for learning stage 3, as compared to learning stage 1 and 2 (Figure 5). A significant difference was found between learning stages 1 and 2; on average, more brain activation was required in learning stage 2 than learning stage 1.
Independent t-tests on Average HbO Between Pairs of Learning Stages.

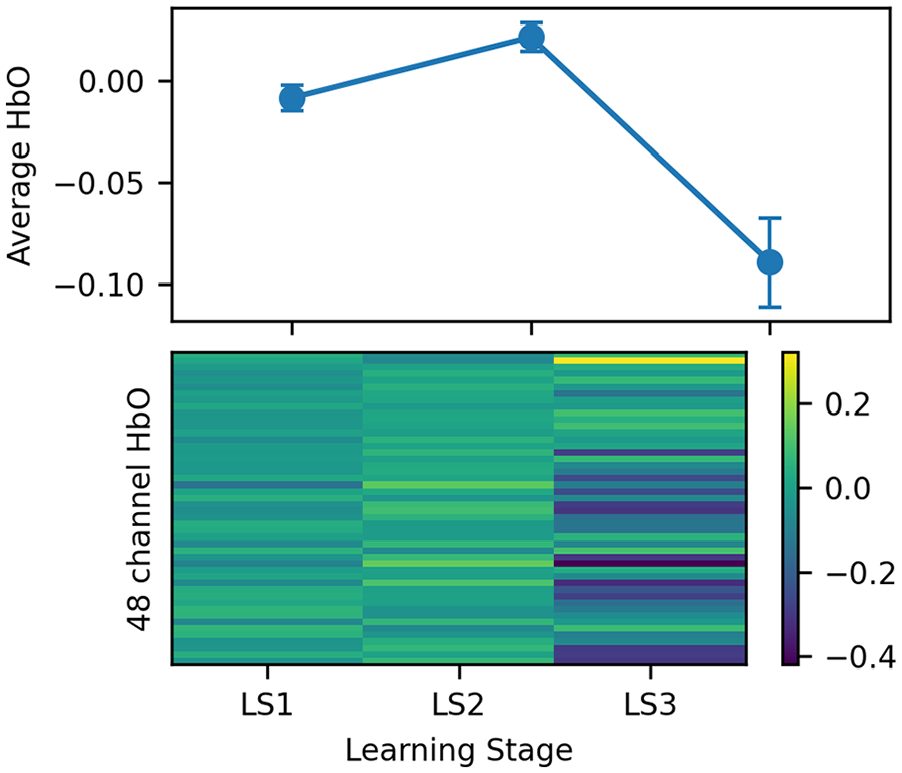
Average HbO is aggregated over all participants for each learning stage. Top: The mean and standard error for all average HbO values decreases as learning stage increases. Bottom: The channel HbO values vary across learning stages, with more homogeneity in earlier learning stages as compared to later learning stages.
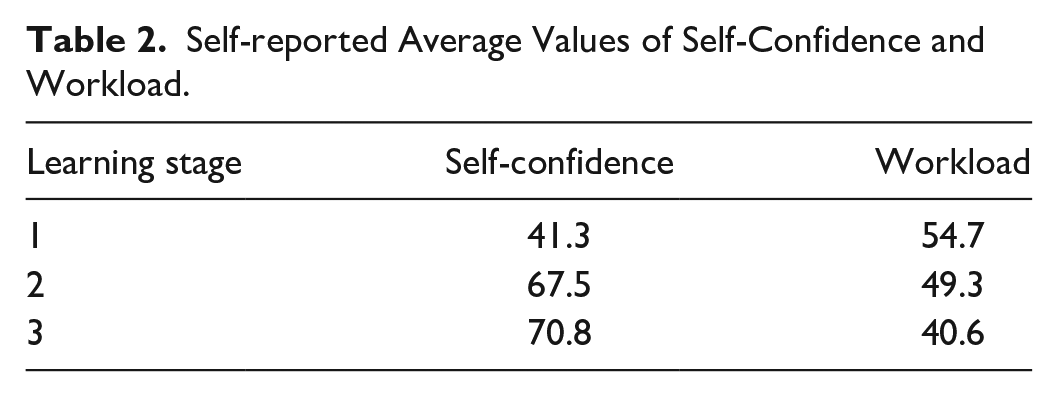
Participants reported their self-confidence and workload after each trial. Table 2 shows that self-confidence increased with learning stage while workload decreased with learning stage.
Self-reported Average Values of Self-Confidence and Workload.
Discussion
We observe marked differences in 48 channel HbO between higher and lower learning stages (see Figure 5).
The heat map of learning stages 1 and 2 have considerably higher and more homogeneous HbO activation than those in learning stage 3. The increased heterogeneity in learning stage 3 could indicate changes in cognitive strategies as participants become more proficient in the task. Widespread activation in early learning stages could reflect a high cognitive load and exploratory learning processes. As proficiency increases, activation may become more localized, suggesting more efficient neural processing and reliance on established neural pathways related to the task. This progression aligns with the transition from conscious, effortful processing to more automatic and skill-based performance. The self-reported workload values for learning stage 3 are less than both learning stage 1 and 2; thus, participants recognized the reduced cognitive load.
Interestingly, we observed increased HbO activation in learning stage 2 as compared to learning stage 1 (Table 1). This is potentially because participants in learning stage 1 often crash uncontrollably without the chance to strategize, whereas participants in learning stage 2 show sustained activation as they seek to control the quadcopter. This trend is inconsistent with self-reported workload (Table 2), which is lower in learning stage 2 than in learning stage 1; however, this may be due to inaccuracies in self-reporting.
Returning to learning stage 3 in Figure 5, we see a significant decrease in average HbO activation. The higher brain activation in learning stages 1 and 2 is likely indicative of the exertion and effort of trying to safely control the quadrotor; meanwhile, in learning stage 3, the increased performance is consistent with the results showing a decreased cognitive load. This implies that the planning and decision-making functions in the prefrontal cortex are overall less activated in learning stage 3 versus learning stages 1 and 2.
Conclusion
In summary, participant trials classified in learning stage 3 experienced significant decreases in HbO activation than those in learning stages 1 and 2. However, future work is needed to isolate regions of activation in the prefrontal cortex. The current work considers the prefrontal cortex as a whole; however, according to the heat map in Figure 5, there exists channels, or regions, of lesser and greater activation across learning stages despite the average HbO value. The heat map in Figure 5 suggests there was a redistribution of brain activation between learning stages. More careful and attentive analysis of which channels to include versus exclude should be done when conducting in-depth, region-based analyses to ensure adequate signal quality for every participant. Finally, as evidenced in Figure 4, human data varies widely between people despite general trends; therefore, future models that use fNIRS brain activation data will likely need to be individualized at some level.
As human operators are increasingly called upon to interact with autonomous dynamical systems, metrics to facilitate human learning become more important. Future work includes determining how to render automated assistance to hasten transitions amongst learning stages, using methods to customize feedback to individual participants’ learning needs.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This material is based upon work supported by the National Science Foundation under NSF Grant Numbers CNS-1836900 and CNS-1836952. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Science Foundation.