
Abstract
Exoskeletons, wearable devices designed to enhance physical activity, show promise in mitigating work-related musculoskeletal disorders and injuries. This study examines exoskeleton efficacy as ergonomic intervention for aiding injured workers with limited trunk mobility in returning to work. Six adult males participated in simulated bending tasks using a trunk mobility restrictor and a passive trunk exoskeleton. Lumbosacral joint loads and moments during bending tasks with and without the exoskeleton were biomechanically assessed using optical motion capture and ground reaction force data as model inputs. Results indicate significant reductions in compressive loads and subject moments at the lumbosacral joint with exoskeleton usage, particularly during full bending. Moreover, the exoskeleton’s supportive impact increases with greater trunk flexion angles. These findings underscore exoskeleton potential in facilitating the return to work for individuals with limited trunk mobility, emphasizing the need for further empirical validation in real-world settings.
Keywords
Introduction
The term “exoskeleton” encompasses wearable devices or frameworks specifically designed to enhance physical activity through mechanical interaction with the body (ASTM, 2019; Lowe et al., 2019). Exoskeletons can be active, relying on an electrical power source, or passive, using springs and levers to assist the user. Within industrial settings, exoskeletons play a pivotal role in amplifying forces, particularly aiding workers in tasks such as lifting along assembly lines. This amplification is achieved through mechanisms like force magnification, power augmentation, and load sharing (Ford, 2017; Naruse et al., 2003; Neuhaus et al., 2004). Additionally, exoskeletons may also serve as personal protective equipment, engineering controls, and other ergonomic interventions, contributing significantly to the overall safety and productivity of the workplace.
Employees in various work settings experience a spectrum of work-related musculoskeletal disorders and injuries, often stemming from tasks involving material handling. According to the US Bureau of Labor Statistics (US BLS, 2021), private industry employers documented around 2.7 million nonfatal workplace injuries and illnesses in 2020, with an incidence rate of 2.7 cases per 100 full-time equivalent workers. These occurrences contribute to a decline in overall productivity and result in significant time away from work. While the US BLS (2019) does not explicitly monitor the duration of the return-to-work process, it is noteworthy that the median period of absence from work due to injury or illness is reported to be 8 days.
Return-to-work constitutes a pivotal practice facilitating enhanced recovery, diminished absenteeism, and reduced compensation premiums for employers and employees (MacEachen et al., 2006). This process involves intricate steps in reintegrating individuals into the workforce post-injury, influenced by multifaceted social, psychological, and economic factors (Krause et al., 2001). Successful management of return-to-work scenarios requires strategic interventions, especially those rooted in the workplace, and equipped with clearly defined frameworks capable of navigating implementation barriers (Fassier et al., 2011; Krause et al., 2001). As underscored by Krause et al. (1998), diverse interventions, encompassing the use of assistive devices and modifications to the work environment, are recommended to alleviate the costs and burdens associated with injuries, benefiting both employees and employers within the workplace.
Despite the broad utility of exoskeletons across various domains, there is a notable dearth of comprehensive understanding regarding their efficacy as ergonomic interventions to aid injured and recovering workers in the process of returning to work. This study seeks to address this gap by investigating the potential utilization of exoskeleton devices in supporting the return to work for individuals with injuries, furnishing essential support across diverse tasks. Accordingly, the study aims to quantify the extent of support and reduction in load facilitated by the exoskeleton device during a bending task, specifically tailored for workers experiencing limited trunk mobility due to injury or illness.
Materials and Methods
Six adult males, aged 25 ± 5 years, with an average weight of 75 ± 12 kg and an average height of 170 ± 5 cm, were recruited from the university student community for this Institutional Review Board-approved study.
To simulate the return-to-work scenario for individuals with constrained trunk mobility due to injury, a trunk mobility restrictor was utilized. This device (Figure 1), consisting of straps and an indicator, restricted bending along the sagittal plane at specified trunk flexion angles of 20°, 40°, and 60°. Consequently, it prevented subjects from exceeding these predetermined flexion angles, effectively representing the limitations in trunk motion experienced post-injury during bending tasks. A series of bending tasks consisted of sequential actions along the sagittal plane with progressively varying degrees of trunk flexion. In the initial task, the subject executes a bending action along the sagittal plane with the trunk flexion angle capped at 20°. Subsequently, the second bending task involves a similar action with the flexion angle restricted to 40°, while in the third bending task, the flexion angle is limited to 60°. However, during full bending tasks, there are no restrictions on the flexion angle. Each of these tasks was performed three times by the subjects, both with and without wearing the exoskeleton device.
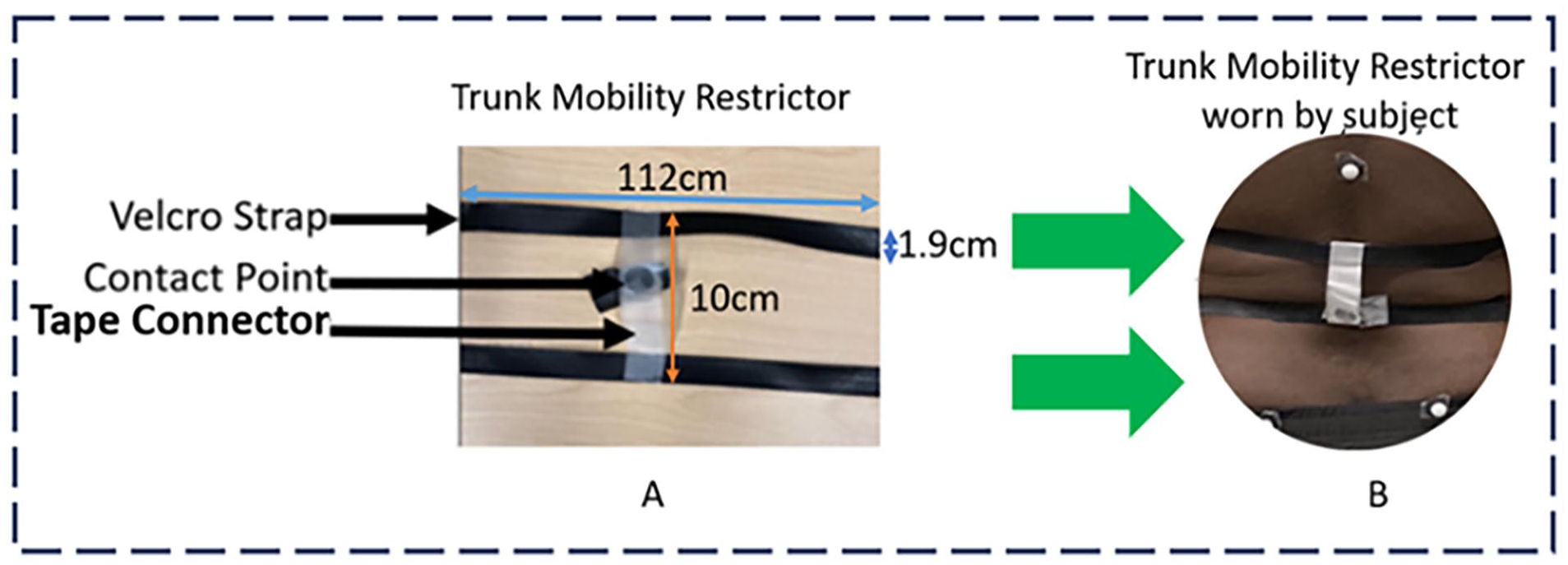
Trunk mobility restrictor for limited trunk movement simulation.
The selection of a passive trunk exoskeleton (EXO, Guangzhou Hyetone) was deemed suitable for this study owing to its capacity to alleviate substantial pressure on the lumbar spine during bending. Both motion data and ground reaction forces were collected using motion capture system (Optitrack, The prime 13, Corvallis, OR) and force plate (Bertec, FP4060-05-PT, Columbus, OH). The collected motion and force data underwent low-pass filtering at 6 and 10 Hz cut-off frequencies, respectively. Subsequently, these filtered data were inputted into a biomechanical model to assess L5/S1 joint loads and moments (Egeonu & Jia, 2023). The total moment is computed utilizing inverse dynamics within the OpenSim software framework. Specifically, the moment attributable to the exoskeleton (

Results
Compressive loads and moments at the lumbosacral joint during standing, bending with limited trunk motion, and full bending while utilizing the exoskeleton device are illustrated in Figures 2 to 4.
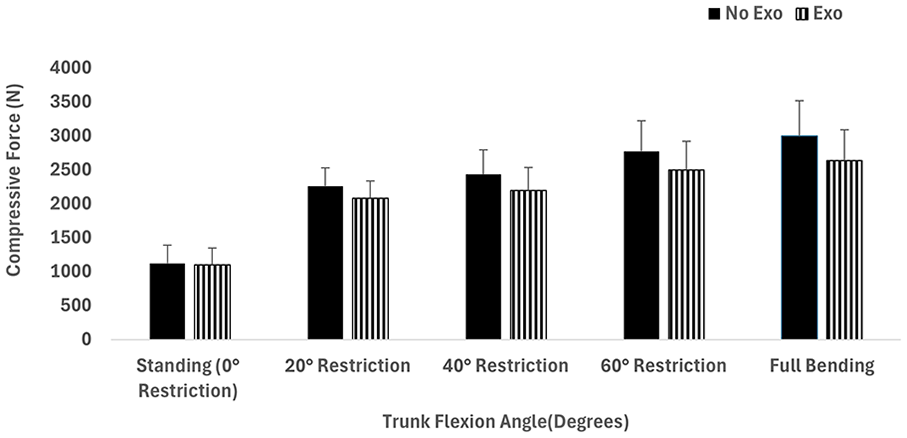
Peak compressive force at different trunk flexion angles with and without exoskeleton.
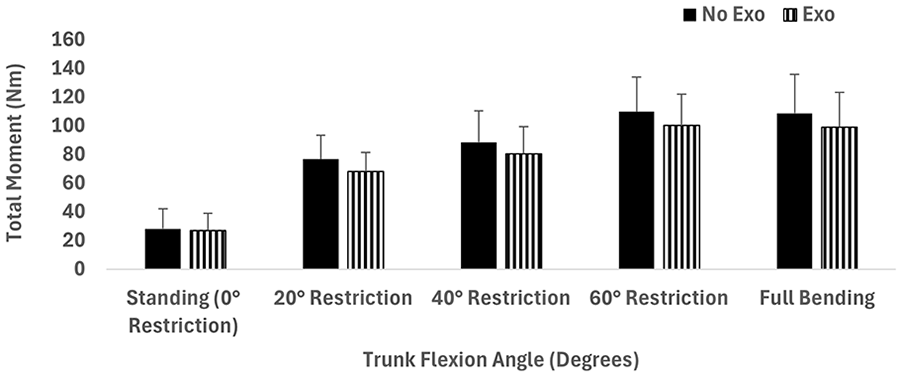
Peak total moment at different trunk flexion angles with and without exoskeleton.
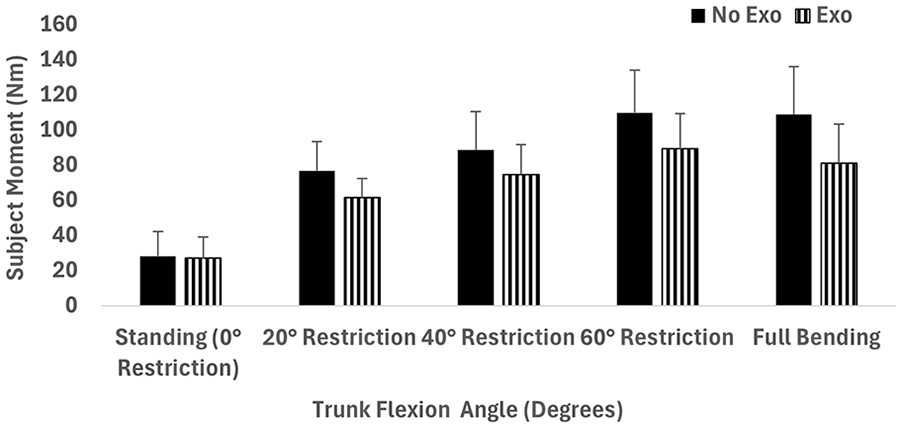
Peak subject moment at different trunk flexion angles with and without exoskeleton.
The maximum compressive load at the L5/S1 joint is evident during full bending, with the minimum observed during standing (Figure 2). Introducing the exoskeleton during bending with restricted trunk angles leads to a noteworthy reduction in the compressive load at the lumbosacral joint compared to scenarios without the exoskeleton. The most substantial reduction, approximately 27.13%, occurs during full bending, while reductions at restricted trunk flexion angles of 20°, 40°, and 60° are 12.7%, 17.2%, and 19.9%, respectively. The minimum compressive load, with and without the exoskeleton, is observed during standing, measuring 1,100 N and 1,125 N, respectively. Conversely, the maximum compressive load during full bending tasks, with and without the exoskeleton, are recorded at 2,640 N and 3,600 N, respectively.
A similar pattern is observed for both the total moments (Figure 3) and subject moments (Figure 4) at the L5/S1 joint, illustrating a general increase with escalating trunk flexion angles and a consequent rise in the extent of support provided by the exoskeleton. Throughout the bending task, moments developed at the L5/S1 joints with the exoskeleton are consistently lower than those without using the exoskeleton. The most significant reduction in the subject moment, approximately 30%, occurs during full bending, while computed reductions at restricted trunk flexion angles of 20°, 40°, and 60° are 17%, 20%, and 24%, respectively. As trunk flexion angles increase, the exoskeleton consistently enhances support, as reflected in the escalating percentage of load reduction for both compressive loads and subject moments. Additionally, the magnitude of support provided by the exoskeleton increases from 14 ± 1.6 Nm at 20° trunk flexion angle to 30 ± 2.0 Nm at full bending.
Discussion
This study investigates the efficacy of an exoskeletal device in mitigating spinal loading during bending tasks and assesses its support for individuals recuperating from injuries with restricted trunk mobility, positioning it as a viable intervention for return to work.
The findings reveal a significant average reduction of 17% in compressive load at the L5/S1 joint, demonstrating a proportional decrease with increased trunk flexion as a result of exoskeleton usage. Notably, a substantial 19% reduction in subject moment was observed in this study, indicating a gradual relief of spinal loading attributed to the exoskeleton’s influence on bending mechanics and muscle activation. These results are consistent with Koopman et al.’s (2020) reported 11% to 21% reduction in compressive load during analogous bending activities and Chen et al.’s (2023) biodynamic modeling, illustrating a substantial decrease in the lumbar flexion moment with exoskeleton usage in manual handling task.
Moreover, this study suggests that the supportive impact of the exoskeleton on load reduction becomes more pronounced with increased trunk range of motion. Consequently, a trade-off arises between the level of support offered and the extent of bending, highlighting the necessity for careful consideration in the deployment and activation of exoskeletons for injured workers with limited trunk movement. While the present simulation study highlights the potential of exoskeletons in facilitating the return to work for workers with limited trunk motion, additional empirical studies are needed to validate their effectiveness in real-world applications, particularly in aiding injured workers get back to work.
Conclusion
In conclusion, exoskeletons represent a promising avenue for addressing work-related musculoskeletal disorders and injuries in industrial settings. Their ability to provide support and reduce spinal loading during tasks such as lifting can significantly enhance workplace safety and productivity. This study sheds light on the potential of exoskeleton devices as ergonomic interventions to aid injured workers in returning to work, particularly those with limited trunk mobility. The findings demonstrate a substantial reduction in compressive loads and subject moments at the lumbosacral joint with exoskeleton usage, indicating their effectiveness in mitigating spinal loading during bending tasks. However, further empirical studies are warranted to validate these findings in real-world applications and assess the broader impact of exoskeletons on workplace safety and employee well-being. Ultimately, integrating exoskeleton technology into occupational settings holds promise for improving return-to-work outcomes and reducing the burden of work-related injuries.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.